Intelligent High-Resolution Geological Mapping Based on SLIC-CNN

Abstract
1. Introduction
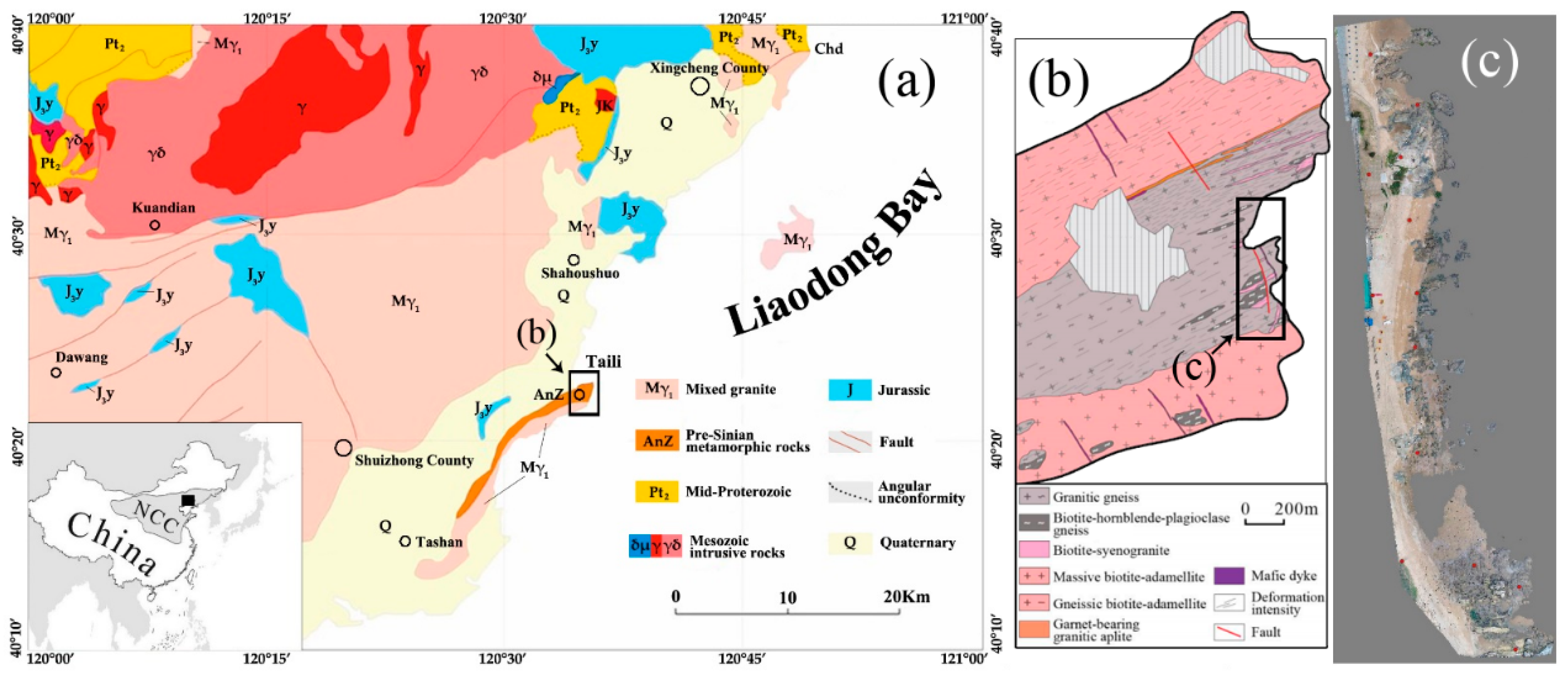
2. Geological Setting
3. Data
3.1. Data Choice
3.2. Preprocessing of Data
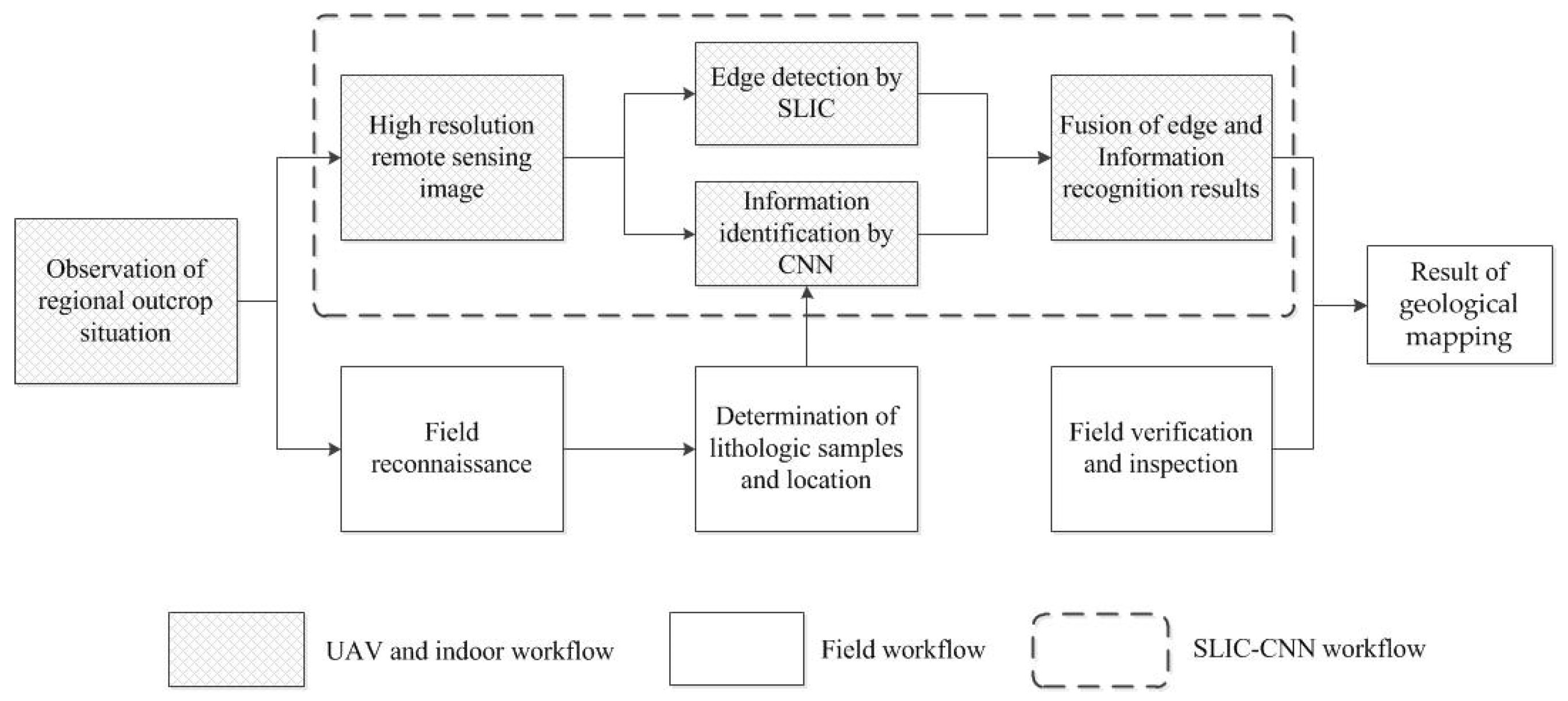
4. Method
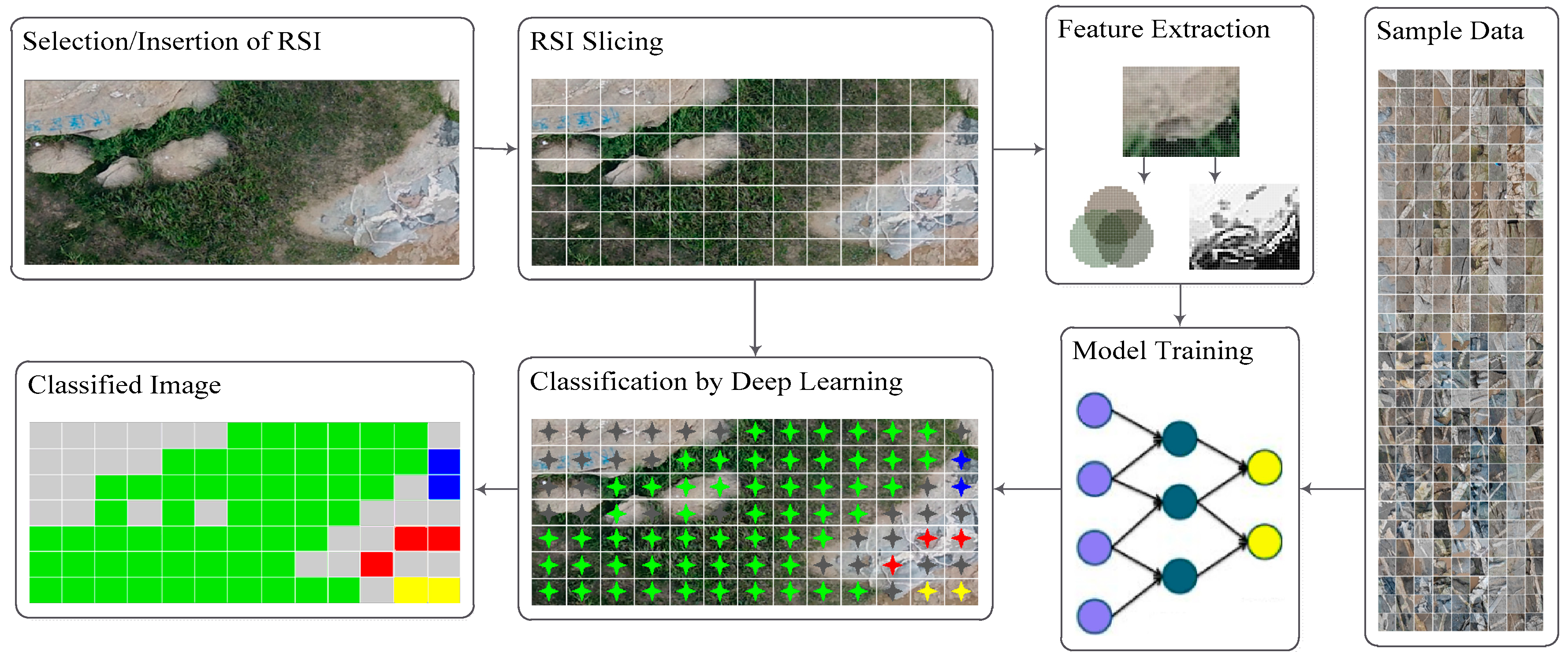
4.1. Original Intention of SLIC-CNN
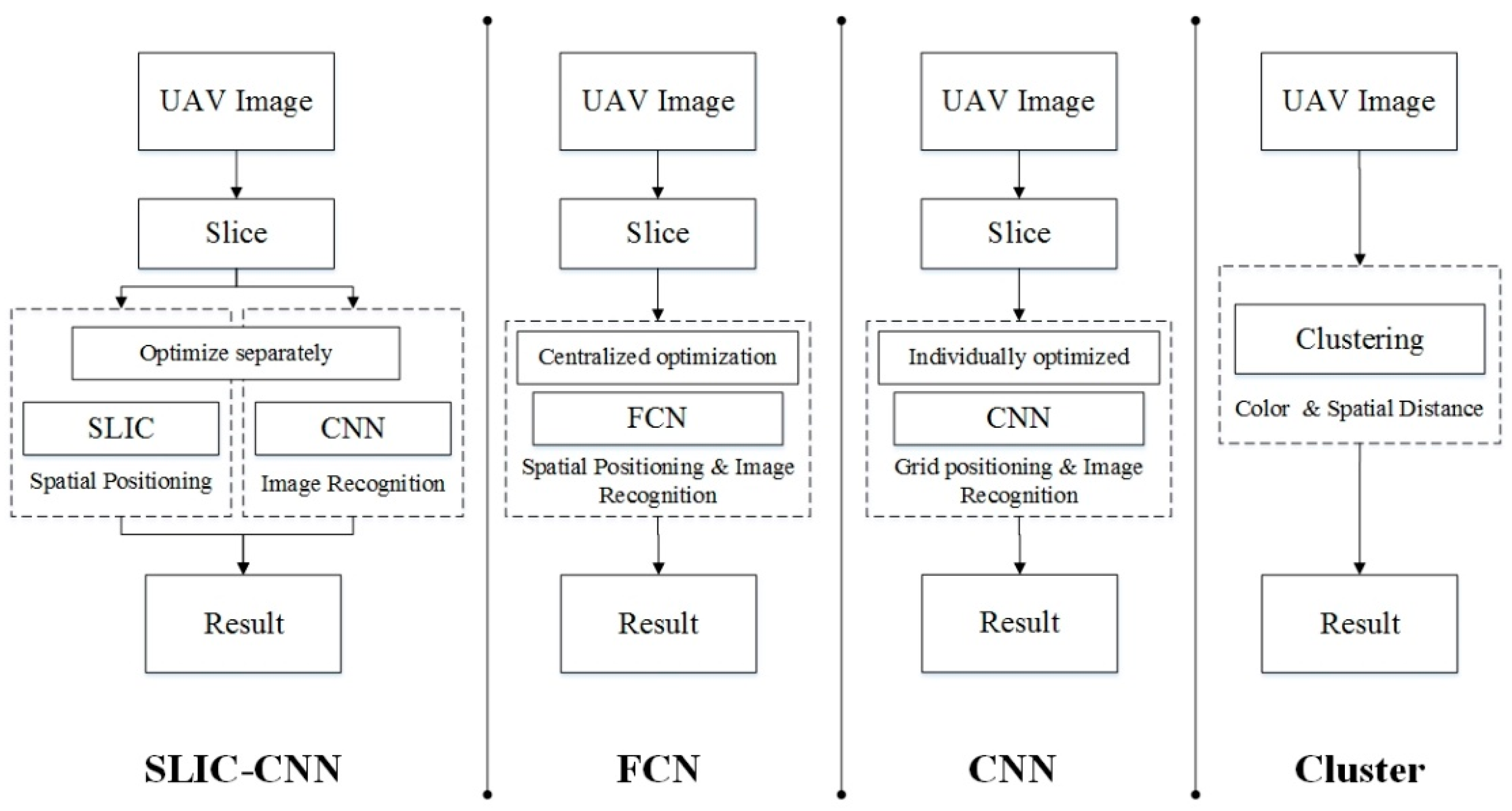
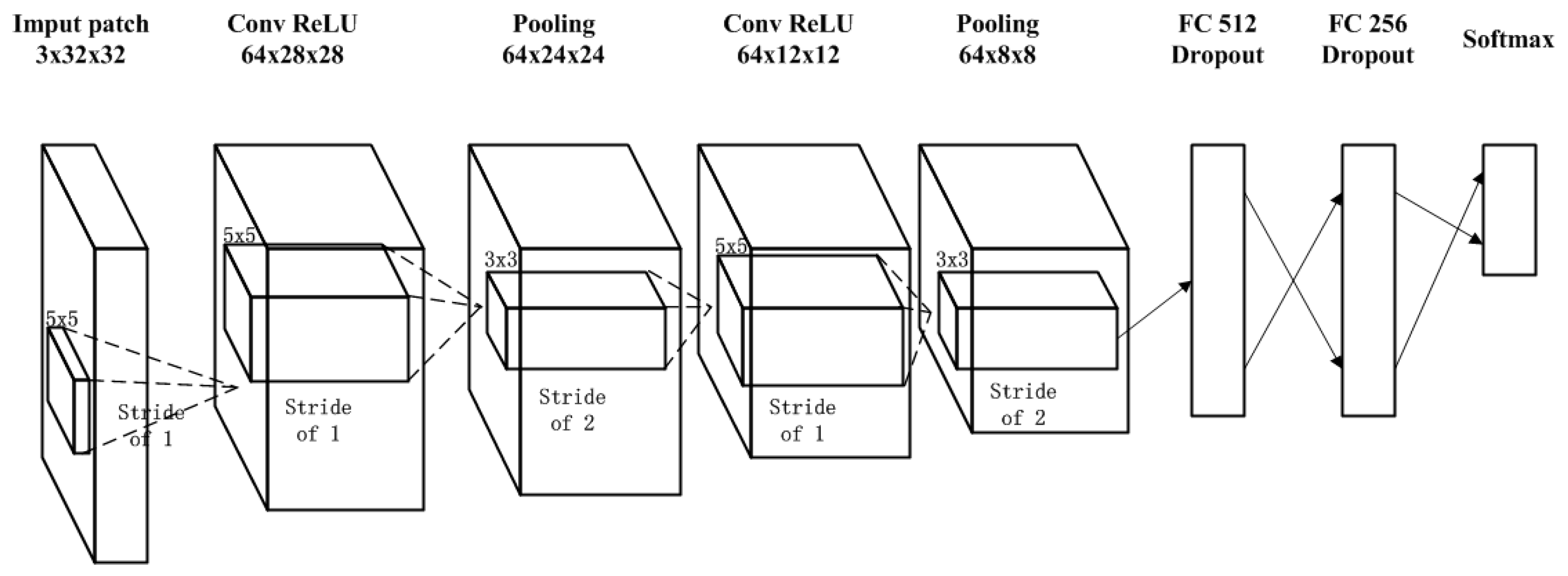
4.2. Structure of SLIC-CNN
4.3. Deep Learning of SLIC-CNN
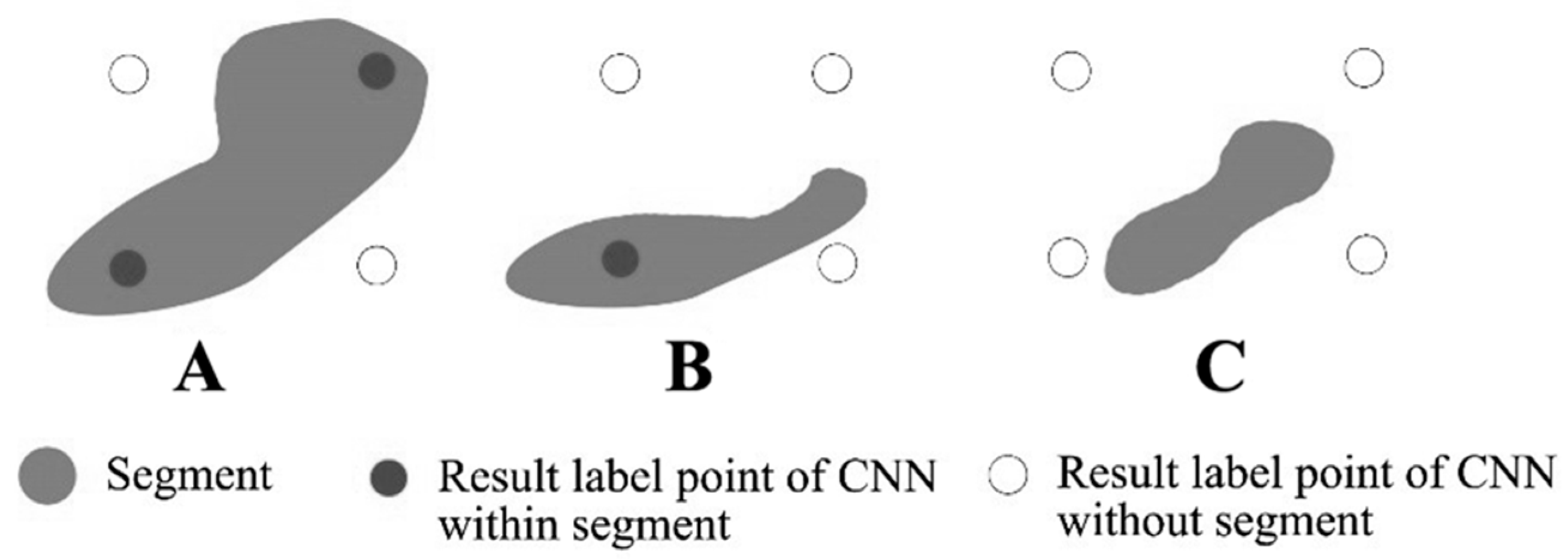
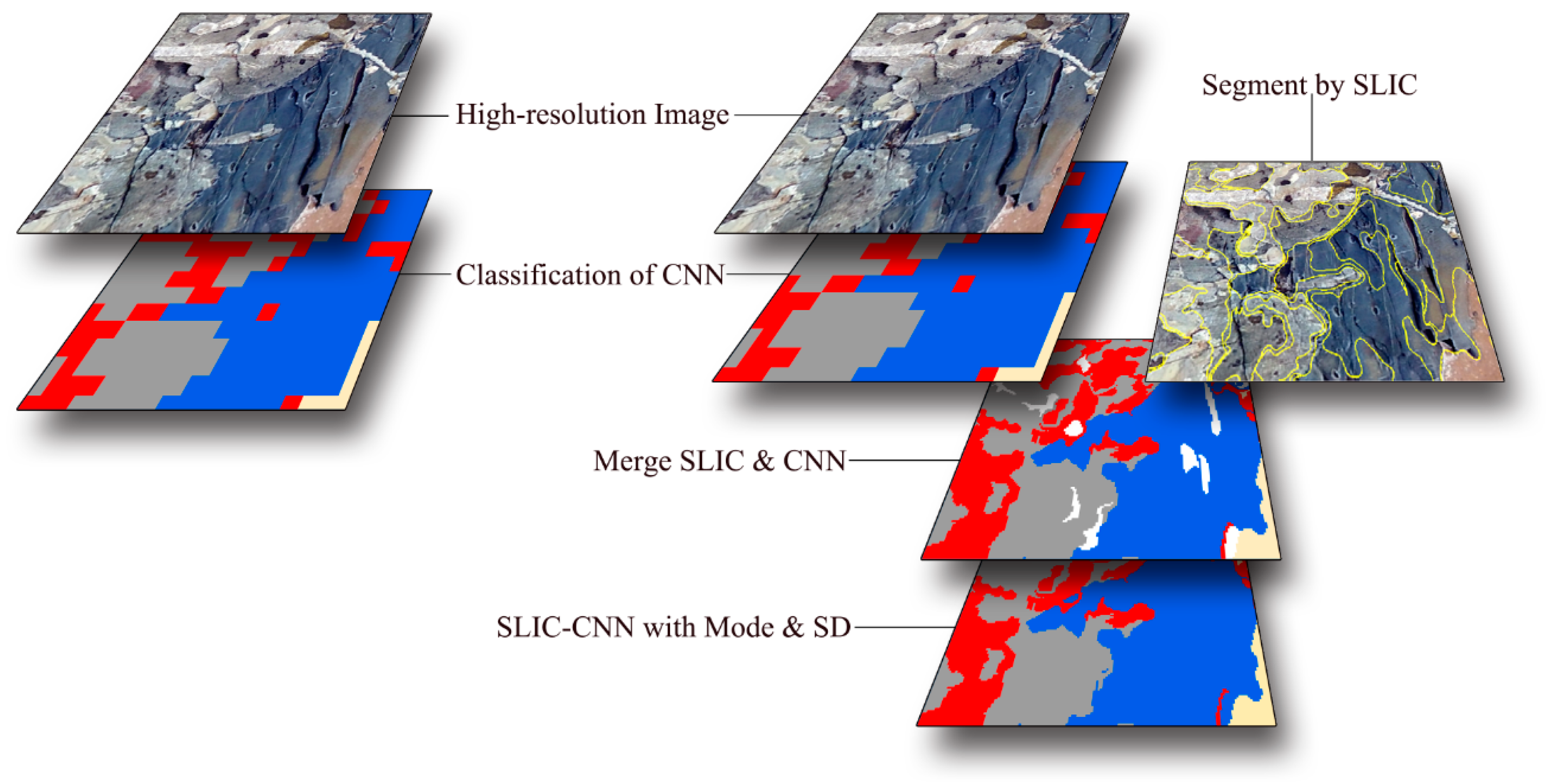
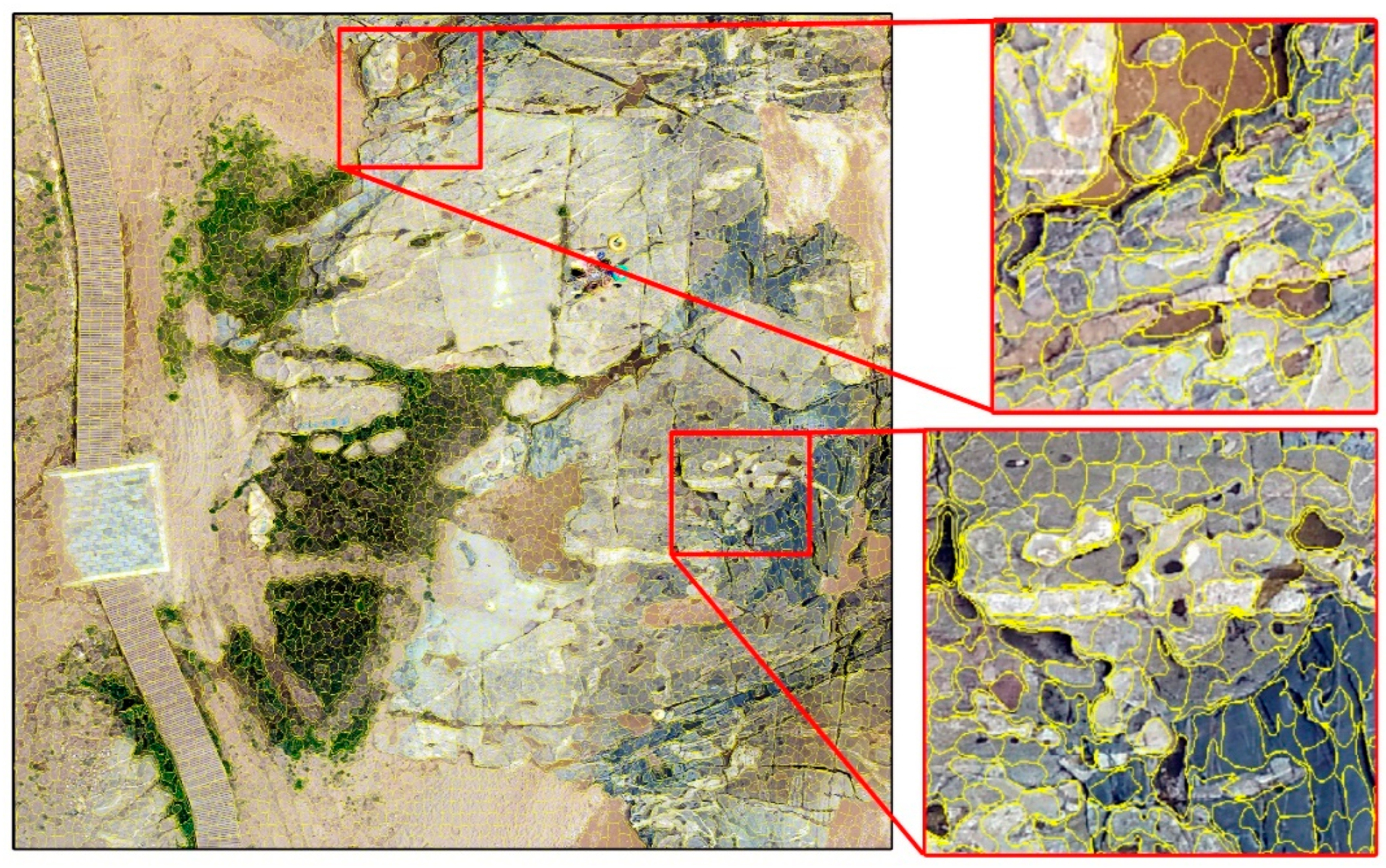
4.4. Superpixel of SLIC-CNN
4.5. Mode and Special Decision of SLIC-CNN
5. Result
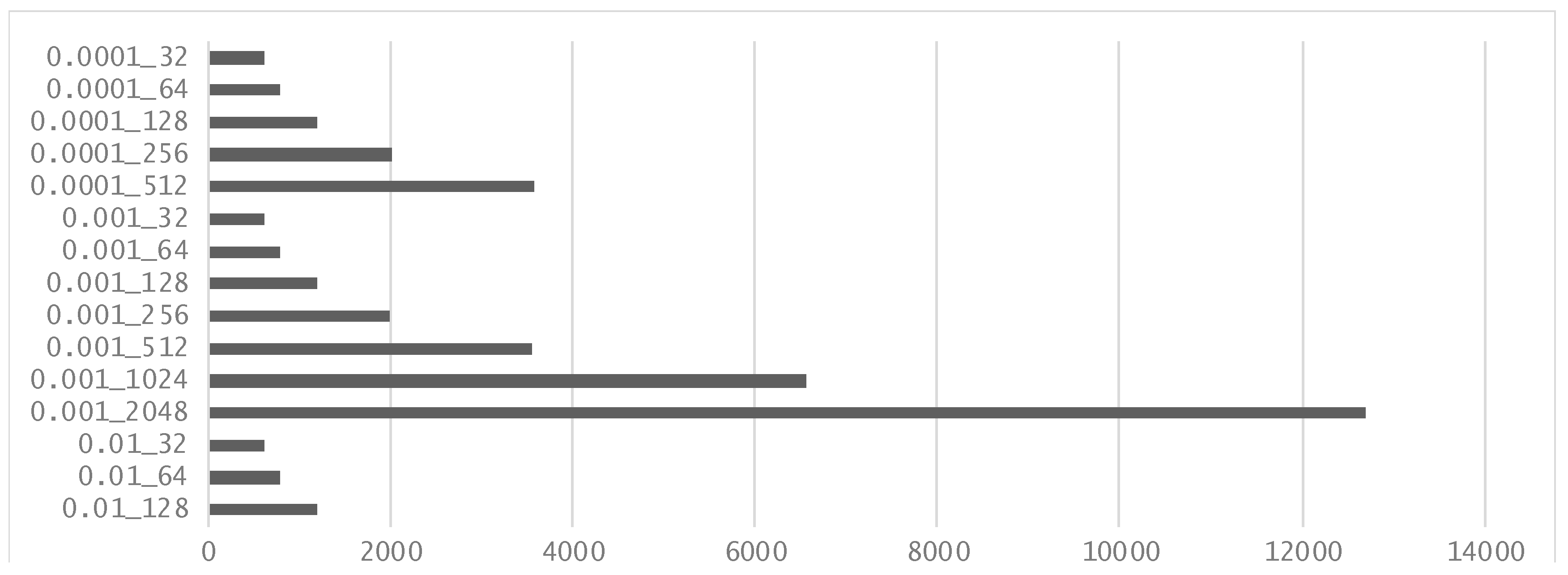
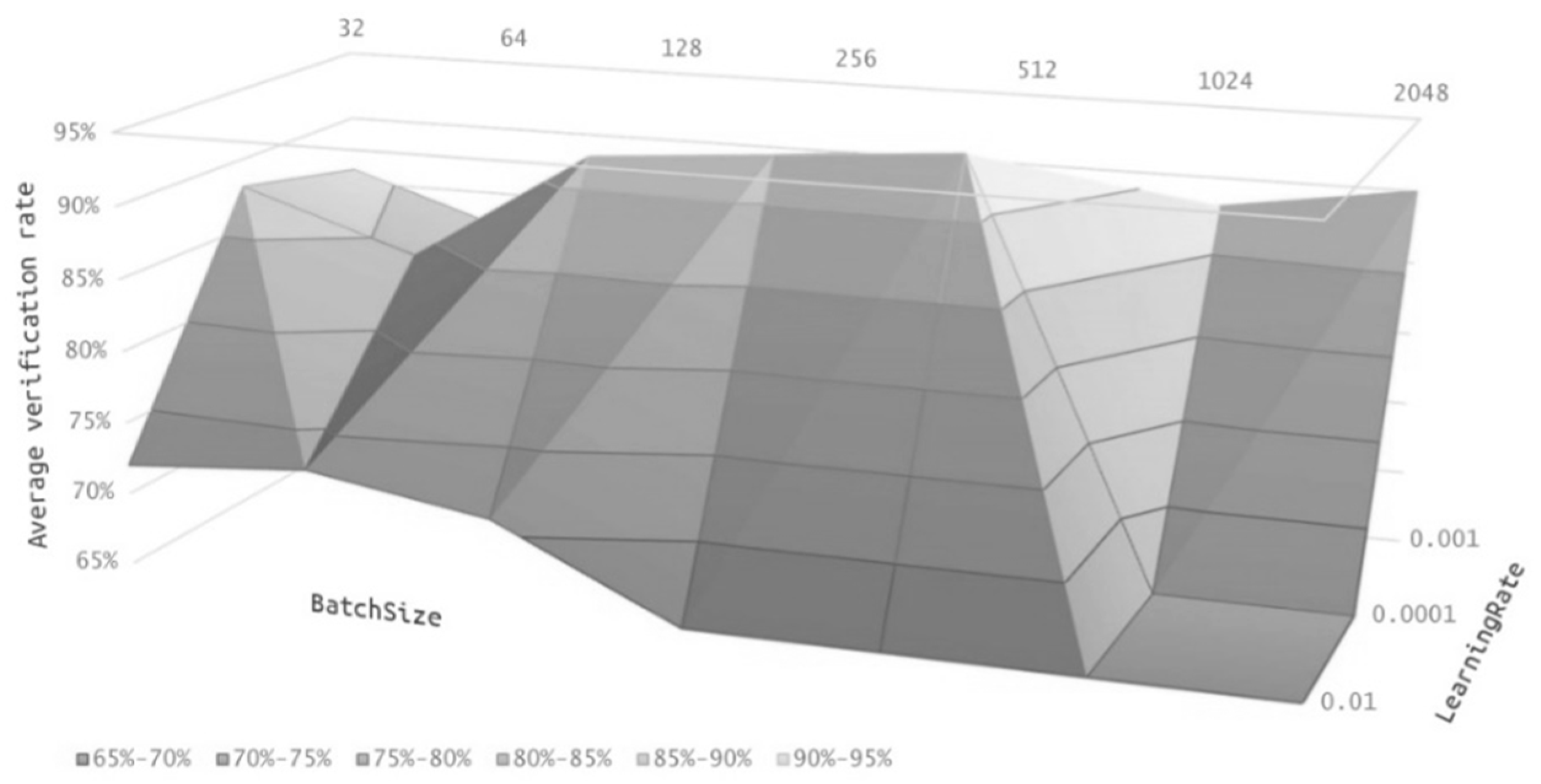
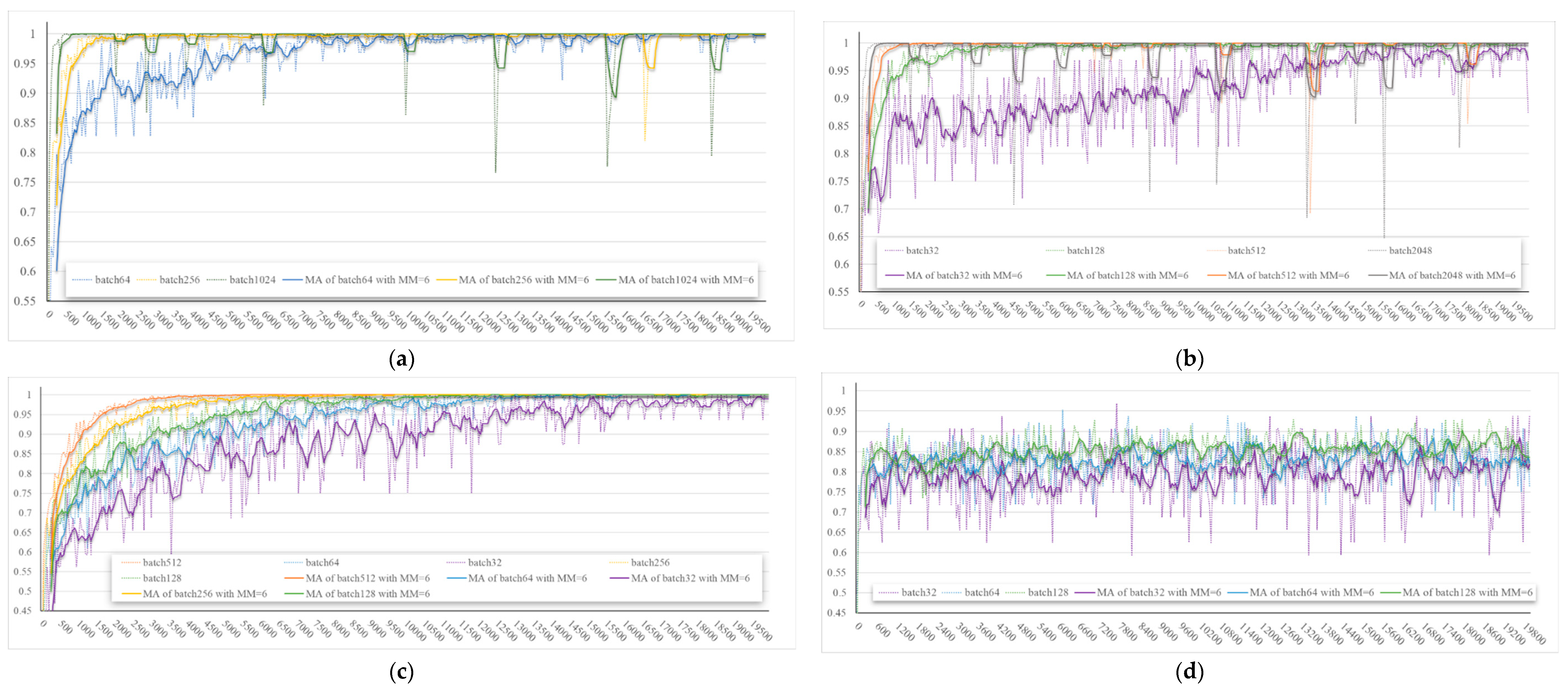
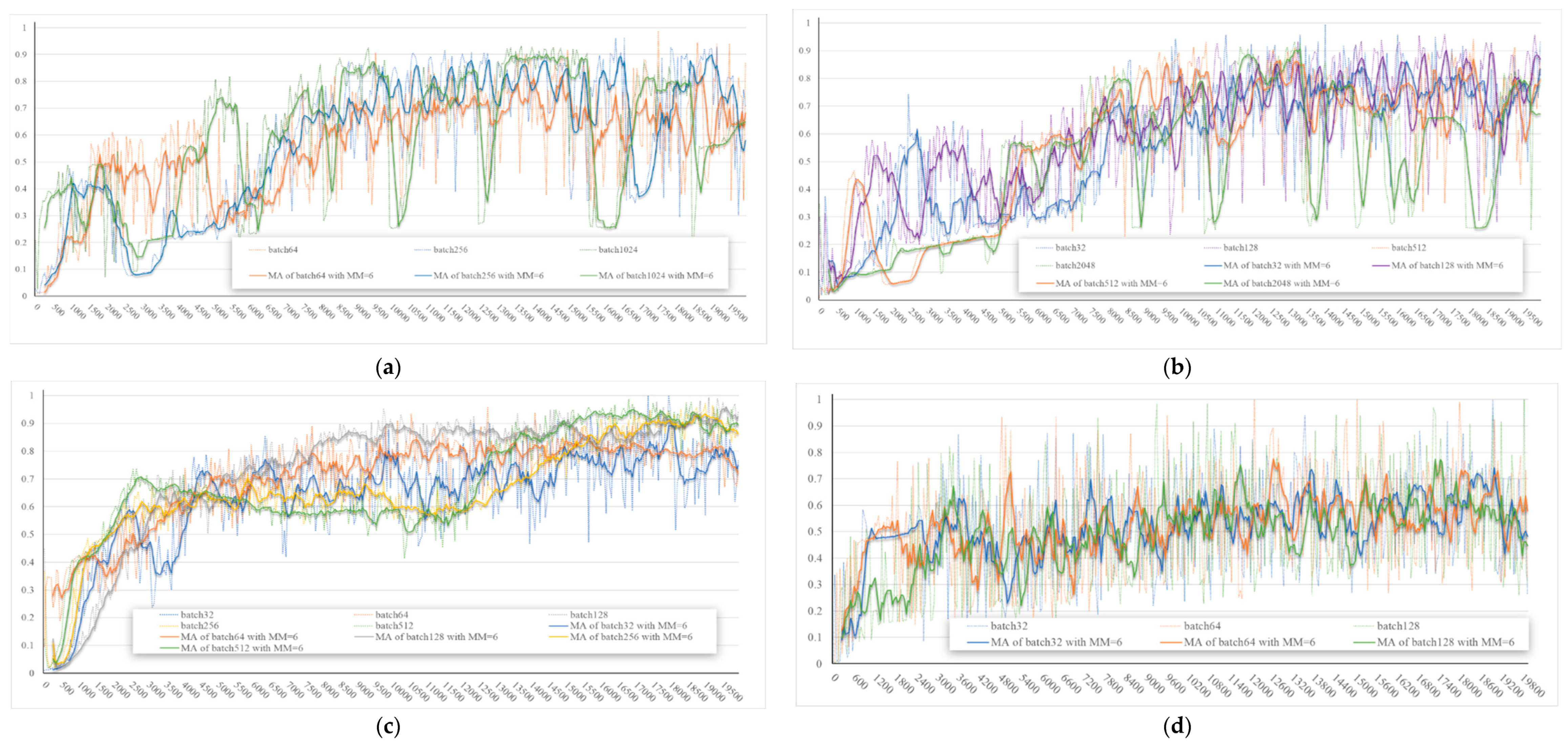
5.1. Optimization of CNN
5.2. Optimization of SLIC
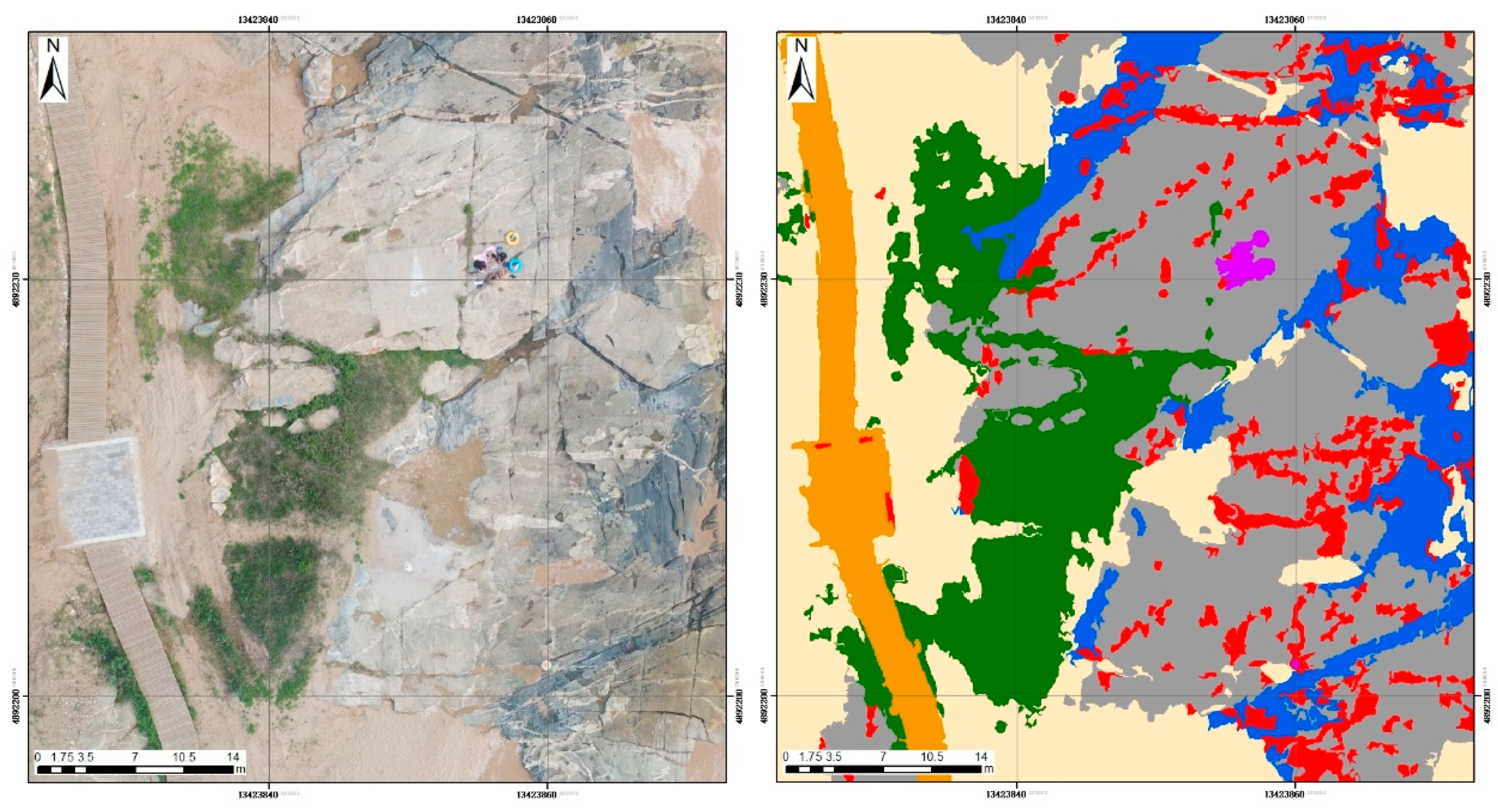
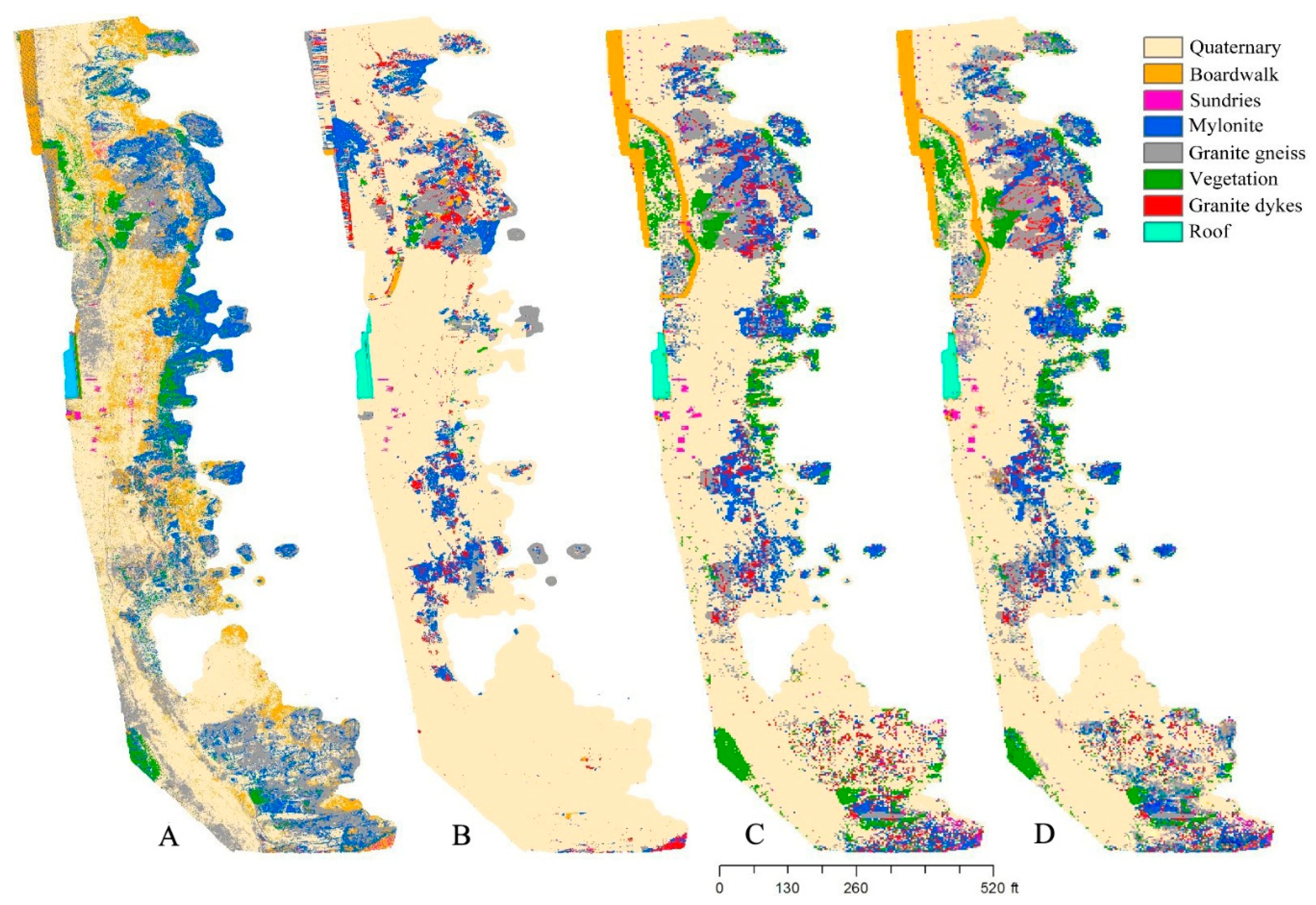
5.3. Results of SLIC-CNN
6. Discussions
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Latifovic, R.; Pouliot, D.; Campbell, J. Assessment of Convolution Neural Networks for Surficial Geology Mapping in the South Rae Geological Region, Northwest Territories, Canada. Remote Sens. 2018, 10, 307. [Google Scholar] [CrossRef]
- Sean, P.B.; Steven, M.; Darren, T.; Mike, R.J.; Sinan, A.; Sam, T.T.; Hasnain, A.B. Ground-based and UAV-Based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar]
- Balestro, G.; Piana, F. The representation of knowledge and uncertainty in databases of GIS geological maps. Ital. J. Geosci. 2007, 126, 487–495. [Google Scholar]
- Nataliia, K.; Mykola, L.; Sergii, S.; Andrii, S. Deep Learning Classification of Land Cover and Crop Types Using Remote Sensing Data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar]
- Almalki, K.A.; Bantan, R.A.; Hashem, H.I.; Loni, O.A.; Ali, M.A. Improving geological mapping of the Farasan Islands using remote sensing and ground-truth data. J. Maps 2017, 13, 900–908. [Google Scholar] [CrossRef]
- Jones, R.R.; Mccaffrey, K.J.W.; Wilson, R.W.; Holdsworth, R.E. Digital field data acquisition: towards increased quantification of uncertainty during geological mapping. Geol. Soc. Lond. Spéc. Publ. 2004, 239, 43–56. [Google Scholar] [CrossRef]
- Chatterjee, S.; Bhattacherjee, A.; Samanta, B.; Pal, K.S. Image-based quality monitoring system of limestone ore grades. Comput. Ind. 2010, 61, 391–408. [Google Scholar] [CrossRef]
- Li, J.; Jin, W.; Zheng, P.; Zhang, X. Geochemical Characteristics and Zircon U-Pb Geochronology of the Biotite Adamellite in Taili Area, Western Liaoning Province. J. Jilin Univ. Earth Sci. Ed. 2014, 44, 1219–1230. [Google Scholar]
- Kroupi, E.; Kesa, M.; Navarro, V.; Saeed, S.; Pelloquin, C.; Alhaddad, B.; Moreno, L.; Soria, A.; Ruffini, G. Deep convolutional neural networks for land-cover classification with Sentinel-2 images. J. Appl. Remote Sens. 2019, 13, 024525. [Google Scholar] [CrossRef]
- Tao, Y.; Xu, M.; Zhong, Y.; Cheng, Y. GAN-Assisted Two-Stream Neural Network for High-Resolution Remote Sensing Image Classification. Remote Sens. 2017, 9, 1328. [Google Scholar] [CrossRef]
- Fu, G.; Liu, C.; Zhou, R.; Sun, T.; Zhang, Q. Classification for High Resolution Remote Sensing Imagery Using a Fully Convolutional Network. Remote Sens. 2017, 9, 498. [Google Scholar] [CrossRef]
- Ferreira, A.; Giraldi, G. Convolutional Neural Network approaches to granite tiles classification. Expert Syst. Appl. 2017, 84, 1–11. [Google Scholar] [CrossRef]
- Cracknell, M.J.; Reading, A.M. The upside of uncertainty: Identification of lithology contact zones from airborne geophysics and satellite data using random forests and support vector machines. Geophysics 2013, 78, 113–126. [Google Scholar] [CrossRef]
- Hesamian, M.H.; Jia, W.; He, X.; Kennedy, P. Deep Learning Techniques for Medical Image Segmentation: Achievements and Challenges. J. Digit. Imaging 2019, 32, 582–596. [Google Scholar] [CrossRef] [PubMed]
- Jia, F.; Lei, Y.; Guo, L.; Lin, J.; Xing, S. A neural network constructed by deep learning technique and its application to intelligent fault diagnosis of machines. Neurocomputing 2018, 272, 619–628. [Google Scholar] [CrossRef]
- Tang, J.; Deng, C.; Huang, G.B.; Zhao, B. Compressed-Domain Ship Detection on Spaceborne Optical Image Using Deep Neural Network and Extreme Learning Machine. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1174–1185. [Google Scholar] [CrossRef]
- Xianju, L.; Xinwen, C.; Weitao, C.; Gang, C.; Shengwei, L. Identification of Forested Landslides Using LiDar Data, Object-based Image Analysis, and Machine Learning Algorithms. Remote Sens. 2015, 7, 9705–9726. [Google Scholar]
- Sharma, A.; Liu, X.; Yang, X.; Shi, D. A patch-based convolutional neural network for remote sensing image classification. Neural Netw. 2017, 95, 19–28. [Google Scholar] [CrossRef]
- Wang, Q.L.; Jin, W.; Cai, L.B.; Cui, X.H.; Zhang, Q.; Wu, C.S. Characteristics and genesis of Neoarchean granitic complex in Xingcheng of western Liaoning. Glob. Geol. 2012, 31, 479–492, (In Chinese with English abstract). [Google Scholar]
- Patel, A.K.; Chatterjee, S. Computer vision-based limestone rock-type classification using probabilistic neural network. Geosci. Front. 2016, 7, 53–60. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet classification with deep convolutional neural networks. Neural Inf. Process. Syst. 2012, 25, 1145–1155. [Google Scholar] [CrossRef]
- Bejiga, M.B. A Convolutional Neural Network Approach for Assisting Avalanche Search and Rescue Operations with UAV Imagery. Remote Sens. 2017, 9, 100. [Google Scholar] [CrossRef]
- Dimitrios, M.; Mihai, D.; Thomas, E.; Uwe, S. Deep Learning Earth Observation Classification Using ImageNet Pretrained Networks. IEEE Geosci. Remote Sens. Lett. 2016, 60, 105–109. [Google Scholar]
- Guidici, D.; Clark, M.L. One-Dimensional Convolutional Neural Network Land-Cover Classification of Multi-Seasonal Hyperspectral Imagery in the San Francisco Bay Area, California. Remote Sens. 2017, 9, 629. [Google Scholar] [CrossRef]
- Bouvrie, J. Notes on Convolutional Neural Networks. Neural Nets 2006, 47–60, in practice. [Google Scholar]
- Ji, S.; Zhang, C.; Xu, A.; Shi, Y.; Duan, Y. 3D Convolutional Neural Networks for Crop Classification with Multi-Temporal Remote Sensing Images. Remote Sens. 2018, 10, 75. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef]
- Abadi, M. TensorFlow: Learning functions at scale. Acm Sigplan Not. 2016, 51, 1. [Google Scholar] [CrossRef]
- Zheng, C.G.; Yuan, D.X.; Yang, Q.Y.; Zhang, X.C.; Li, S.C. UAVRS Technique Applied to Emergency Response Management of Geological Hazard at Mountainous Area. Appl. Mech. Mater. 2013, 239–240, 516–520. [Google Scholar] [CrossRef]
- Machado, G.M.; Jabor, P.; Coelho, A.; Albino, J. Geohistorical evolution and the new geological map of the city of Vitoria, ES, Brazil. Ocean Coast. Manag. 2017, 10, 151. [Google Scholar] [CrossRef]
- Tziavou, O.; Pytharouli, S.; Souter, J. Unmanned Aerial Vehicle (UAV) based mapping in engineering geological surveys: Considerations for optimum results. Eng. Geol. 2017, 11, 232–250. [Google Scholar] [CrossRef]
- Yathunanthan, V.; Eun-Jung, H.; Peter, K.; Steven, M. Semi-automatic mapping of geological Structures using UAV-based photogrammetric data: An image analysis approach. Comput. Geosci. 2014, 69, 22–32. [Google Scholar]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z. Traffic Flow Prediction with Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, S.M. Deep learning for visual understanding: A review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef]
- Holden, D.; Saito, J.; Komura, T. A deep learning framework for character motion synthesis and editing. ACM Trans. Graph. 2016, 35, 1–11. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Jin, W.; Neubauer, F.; Zhao, Y.; Liang, C.; Wen, Q.; Feng, Z.; Li, J.; Liu, Q. Syntectonic emplacement of the Triassic biotite-syenogranite intrusions in the Taili area, western Liaoning, NE China: Insights from petrogenesis, rheology and geochronology. J. Asian Earth Sci. 2017, 1, 20. [Google Scholar] [CrossRef]
- Wu, F.Y.; Yang, J.H.; Zhang, Y.B. Emplacement ages of the Mesozoic granites in southeastern part of the Western Liaoning Province. Acta Pet. Sin. 2006, 22, 315–325, (In Chinese with English abstract). [Google Scholar]
- Liang, C.Y.; Liu, Y.J.; Neubauer, F.; Bernroider, M.; Jin, W.; Li, W.; Zeng, Z.; Wen, Q.; Zhao, Y. Structures, kinematic analysis, rheological parameters and temperature-pressure estimate of the Mesozoic Xingcheng-Taili ductile shear zone in the North China Craton. J. Struct. Geol. 2015, 78, 27–51. [Google Scholar] [CrossRef]
- Liang, C.Y. Deformation Mechanisms and Evolution of the Xingcheng-Taili Ductile Shear Zone, Eastern North China Craton. Ph.D. Thesis, Salzburg University, Salzburg, Austria, 2015; pp. 1–168. [Google Scholar]
- Liang, C.Y.; Liu, Y.J.; Neubauer, F.; Jin, W.; Zeng, Z.; Genser, J.; Li, W.; Li, W.; Han, G.; Wen, Q.; et al. Structural characteristics and LA-ICP-MS U-Pb zircon geochronology of the deformed granitic rocks from the Mesozoic Xingcheng-Taili ductile shear zone in the North China Craton. Tectonophysics 2015, 650, 80–103. [Google Scholar] [CrossRef]
- Luo, W.; Liu, Y.; Fang, B.; Li, W.; Ji, Q.; Liang, G. Analysis of the genesis of the globular structure in the mylonite of the Taili ductile shear zone in western Liaoning. World Geol. 2014, 33, 844–854, (In Chinese with English abstract). [Google Scholar]
- Mukherjee, D.P.; Potapovich, Y.; Levner, I.; Zhang, H. Ore image segmentation by learning image and shape features. Pattern Recognit. Lett. 2009, 30, 615–622. [Google Scholar] [CrossRef]
- Litjens, G.; Kooi, T.; Bejnordi, B.E.; Setio, A.; Ciompi, F.; Ghafoorian, M.; Van Der Laak, J.; Ginneken, B.; Sánchez, C. A survey on deep learning in medical image analysis. Med. Image Anal. 2017, 40, 60. [Google Scholar] [CrossRef] [PubMed]
- Hinton, G.E.; Osindero, S.; The, Y.W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2014, 18, 1527–1554. [Google Scholar] [CrossRef]
- He, Z.; Liu, H.; Wang, Y.; Hu, J. Generative Adversarial Networks-Based Semi-Supervised Learning for Hyperspectral Image Classification. Remote Sens. 2017, 9, 1042. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A convolutional neural network-based feature learning and fault diagnosis method for the condition monitoring of gearbox. Measurement 2017, 7, 1–10. [Google Scholar] [CrossRef]
- Yang, M.; Liu, Y.; You, Z. The Euclidean embedding learning based on convolutional neural network for stereo matching. Neurocomputing 2017, 6, 195–200. [Google Scholar] [CrossRef]
- Santos, J.A.; Faria, F.; Calumby, R.; Torres, R.; Lamparelli, R. A Genetic Programming approach for coffee crop recognition. Geosci. Remote Sens. Symp. 2010, 1, 3418–3421. [Google Scholar]
- Sajjad, M.; Khan, S.; Hussain, T.; Muhammad, K.; Sangaiah, A.; Castiglione, A.; Esposito, C.; Baik, S. CNN-based Anti-Spoofing Two-Tier Multi-Factor Authentication System. Pattern Recognit. Lett. 2019, 126, 123–131. [Google Scholar] [CrossRef]
- Ran, X.; Xue, L.; Zhang, Y.; Liu, Z.; Sang, X.; He, J. Rock Classification from Field Image Patches Analyzed Using a Deep Convolutional Neural Network. Mathematics 2019, 7, 755. [Google Scholar] [CrossRef]
- Tam, V.W.Y.; Le, K.N.; Evangelista, A.C.J.; Butera, A.; Tran, C.; Teara, A. Effect of fly ash and slag on concrete: Properties and emission analyses. Front. Eng. Manag. 2019, 6, 395. [Google Scholar] [CrossRef]
- Levinshtein, A.; Stere, A.; Kutulakos, K.N.; Fleet, D.J.; Dickinson, S.J.; Siddiqi, K. TurboPixels: Fast superpixels using geometric flows. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2290–2297. [Google Scholar] [CrossRef] [PubMed]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Sabine, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Jose, M.; José, M.J.; Geazy, M. Image Segmentation and Classification with SLIC Superpixel and Convolutional Neural Network in Forest Context. IEEE Int. Geosci. Remote Sens. Symp. 2019, 1, 6543–6546. [Google Scholar]
- Yuxiang, Z.; Kang, L.; Yanni, D.; Ke, W.; Xiangyun, H. Semisupervised Classification Based on SLIC Segmentation for Hyperspectral Image. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef]
- Dawa, D.; Jordi, I.; Julien, M. Scaling Up SLIC Superpixels Using a Tile-Based Approach. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3073–3085. [Google Scholar]
- Lizhen, L.; Chuang, W.; Xiao, Y. Incorporating Texture into SLIC Super-pixels Method for High Spatial Resolution Remote Sensing Image Segmentation. Int. Conf. Agro-Geoinformatic 2019, 1, 1–5. [Google Scholar]
- Vasuki, Y.; Holden, E.J.; Kovesi, P.; Steven, M. An interactive image segmentation method for lithological boundary detection: A rapid mapping tool for geologists. Comput. Geosci. 2017, 100, 27–40. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Description | Number of Training Samples | Number of Verification Samples | Total Number of Samples |
|---|---|---|---|---|
| Quaternary | Beach, gravel | 600 | 3277 | 3877 |
| Granite Dykes | granite aplite, granite pegmatite | 600 | 281 | 881 |
| Mylonite | Augen mylonites, Augen undeveloped mylonites | 600 | 743 | 1343 |
| Vegetation | Shrubs, grasses, algae, etc. | 600 | 1199 | 1799 |
| Sundries | People, kayaks, lifebuoys, bags, etc. | 30 | 16 | 46 |
| Boardwalk | boardwalk | 600 | 280 | 880 |
| Orthogneiss | Orthogneiss | 600 | 4006 | 4606 |
| Real | Quaternary | Granite Dykes | Mylonite | Vegetation | Sundries | Boardwalk | Orthogneiss | |
|---|---|---|---|---|---|---|---|---|
| Test | ||||||||
| Quaternary | 67.20% | 0.72% | 0.53% | 4.03% | 2.46% | 23.30% | 1.76% | |
| Granite Dykes | 54.10% | 9.27% | 0.07% | 1.93% | 5.62% | 29.01% | ||
| Mylonite | 0.96% | 0.13% | 84.71% | 4.20% | 9.91% | 0.09% | ||
| Vegetation | 0.45% | 0.76% | 0.06% | 88.08% | 0.60% | 4.60% | 5.45% | |
| Sundries | 1.57% | 77.02% | 8.29% | 13.11% | ||||
| Boardwalk | 28.97% | 11.17% | 3.02% | 3.62% | 5.01% | 48.15% | 0.06% | |
| Orthogneiss | 2.42% | 31.55% | 2.41% | 12.97% | 0.13% | 50.52% | ||
| Real | Quaternary | Granite Dykes | Mylonite | Vegetation | Sundries | Boardwalk | Orthogneiss | |
|---|---|---|---|---|---|---|---|---|
| Test | ||||||||
| Quaternary | 45.54% | 1.19% | 2.04% | 24.81% | 2.09% | 21.98% | 2.35% | |
| Granite Dykes | 0.30% | 54.60% | 13.22% | 4.36% | 1.71% | 5.66% | 20.15% | |
| Mylonite | 0.96% | 10.48% | 61.72% | 19.27% | 7.57% | |||
| Vegetation | 20.91% | 0.72% | 6.17% | 48.03% | 15.16% | 4.59% | 4.42% | |
| Sundries | 6.50% | 1.45% | 4.34% | 61.62% | 11.97% | 14.12% | ||
| Boardwalk | 23.76% | 5.86% | 5.53% | 3.40% | 5.27% | 48.06% | 8.12% | |
| Orthogneiss | 2.03% | 25.70% | 6.98% | 0.13% | 14.15% | 0.17% | 50.84% | |
| Real | Quaternary | Granite Dykes | Mylonite | Vegetation | Sundries | Boardwalk | Orthogneiss | |
|---|---|---|---|---|---|---|---|---|
| Test | ||||||||
| Quaternary | 93.09% | 2.28% | 2.57% | 5.40% | 3.16% | 1.22% | ||
| Granite Dykes | 0.46% | 53.15% | 5.69% | 0.24% | 0.25% | 6.07% | ||
| Mylonite | 1.03% | 9.86% | 85.79% | 0.59% | 1.02% | 1.54% | ||
| Vegetation | 2.07% | 0.50% | 0.15% | 90.52% | 1.36% | |||
| Sundries | 0.16% | 85.50% | 0.17% | |||||
| Boardwalk | 1.36% | 0.82% | 0.95% | 0.16% | 95.82% | |||
| Orthogneiss | 1.99% | 33.23% | 5.81% | 2.29% | 14.09% | 89.63% | ||
| Real | Quaternary | Granite Dykes | Mylonite | Vegetation | Sundries | Boardwalk | Orthogneiss | |
|---|---|---|---|---|---|---|---|---|
| Test | ||||||||
| Quaternary | 93.46% | 1.93% | 2.57% | 5.01% | 1.26% | 1.31% | ||
| Granite Dykes | 0.39% | 54.26% | 4.85% | 0.06% | 5.5% | |||
| Mylonite | 0.67% | 10.28% | 86.96% | 0.46% | 1.58% | |||
| Vegetation | 2.26% | 0.33% | 0.32% | 91.69% | 1.36% | 1.04% | ||
| Sundries | 0.01% | 0.27% | 83.08% | 0.09% | ||||
| Boardwalk | 1.23% | 0.73% | 0.36% | 0.19% | 97.38% | 0.07% | ||
| Orthogneiss | 1.98% | 32.19% | 5.30% | 2.42% | 16.73% | 90.4% | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sang, X.; Xue, L.; Ran, X.; Li, X.; Liu, J.; Liu, Z. Intelligent High-Resolution Geological Mapping Based on SLIC-CNN. ISPRS Int. J. Geo-Inf. 2020, 9, 99. https://doi.org/10.3390/ijgi9020099
Sang X, Xue L, Ran X, Li X, Liu J, Liu Z. Intelligent High-Resolution Geological Mapping Based on SLIC-CNN. ISPRS International Journal of Geo-Information. 2020; 9(2):99. https://doi.org/10.3390/ijgi9020099
Chicago/Turabian StyleSang, Xuejia, Linfu Xue, Xiangjin Ran, Xiaoshun Li, Jiwen Liu, and Zeyu Liu. 2020. "Intelligent High-Resolution Geological Mapping Based on SLIC-CNN" ISPRS International Journal of Geo-Information 9, no. 2: 99. https://doi.org/10.3390/ijgi9020099
APA StyleSang, X., Xue, L., Ran, X., Li, X., Liu, J., & Liu, Z. (2020). Intelligent High-Resolution Geological Mapping Based on SLIC-CNN. ISPRS International Journal of Geo-Information, 9(2), 99. https://doi.org/10.3390/ijgi9020099