A Novel Rapid Method for Viewshed Computation on DEM through Max-Pooling and Min-Expected Height


Abstract
1. Introduction
2. Related Work
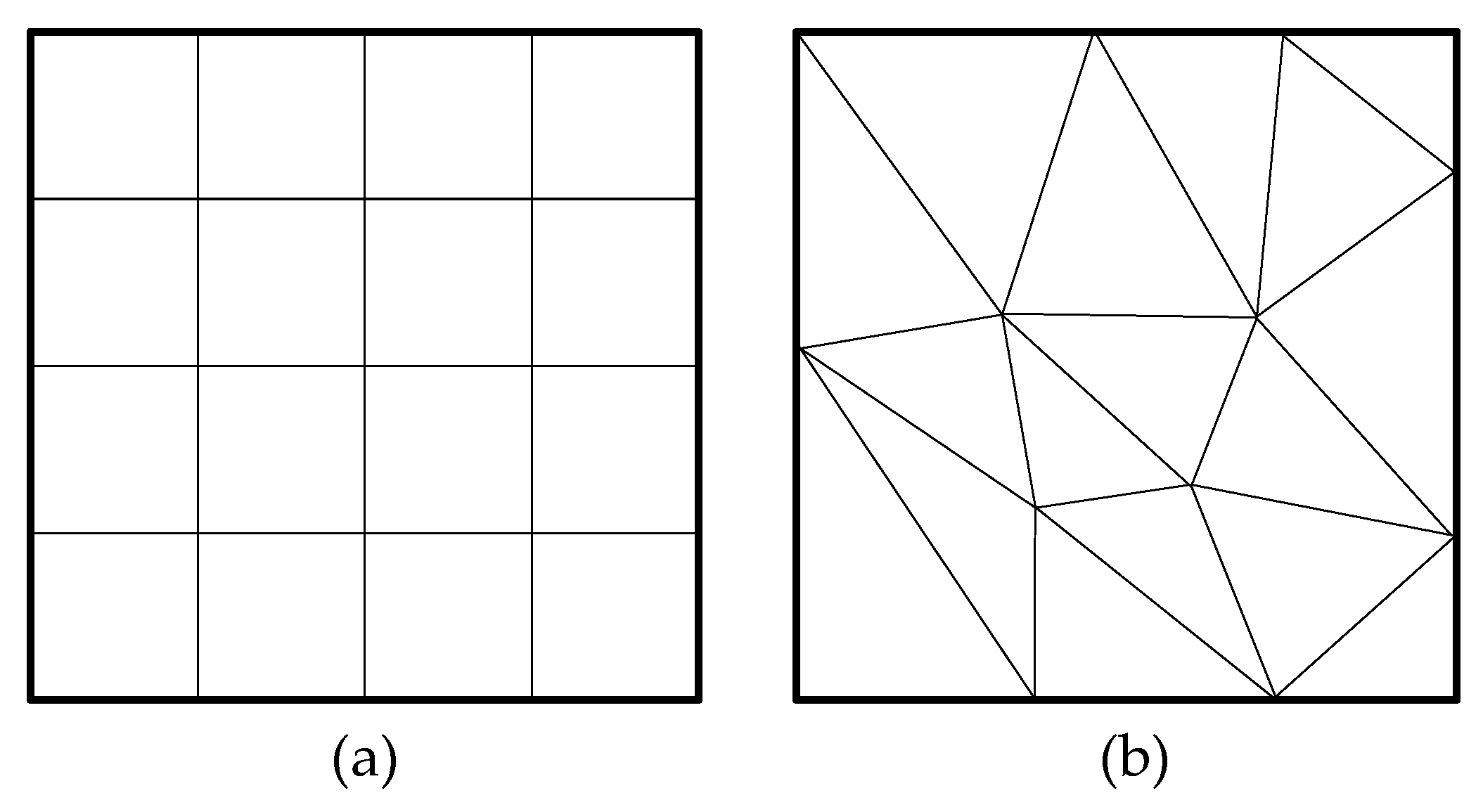
2.1. Terrain Representation
2.2. Method for Computing Visibility
2.3. Methods for Optimizing Visual Domain Algorithms
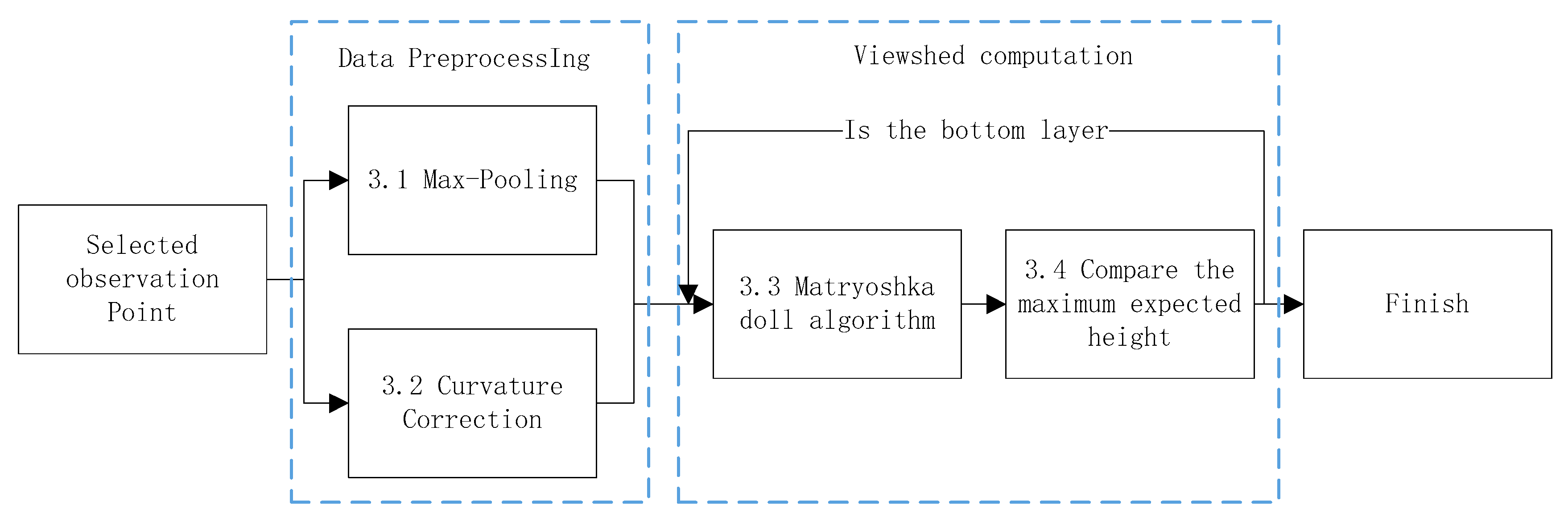
3. Proposed Method
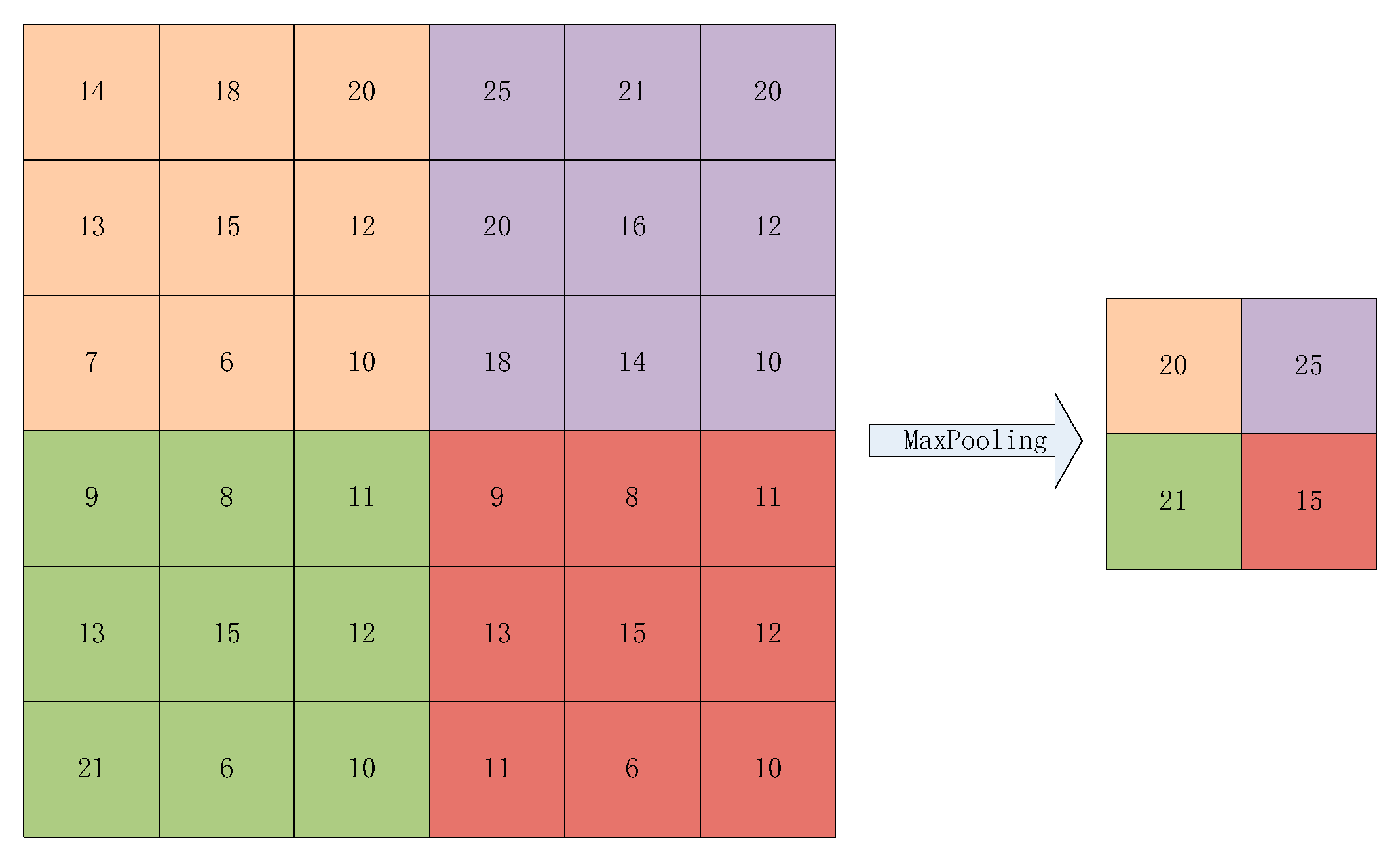
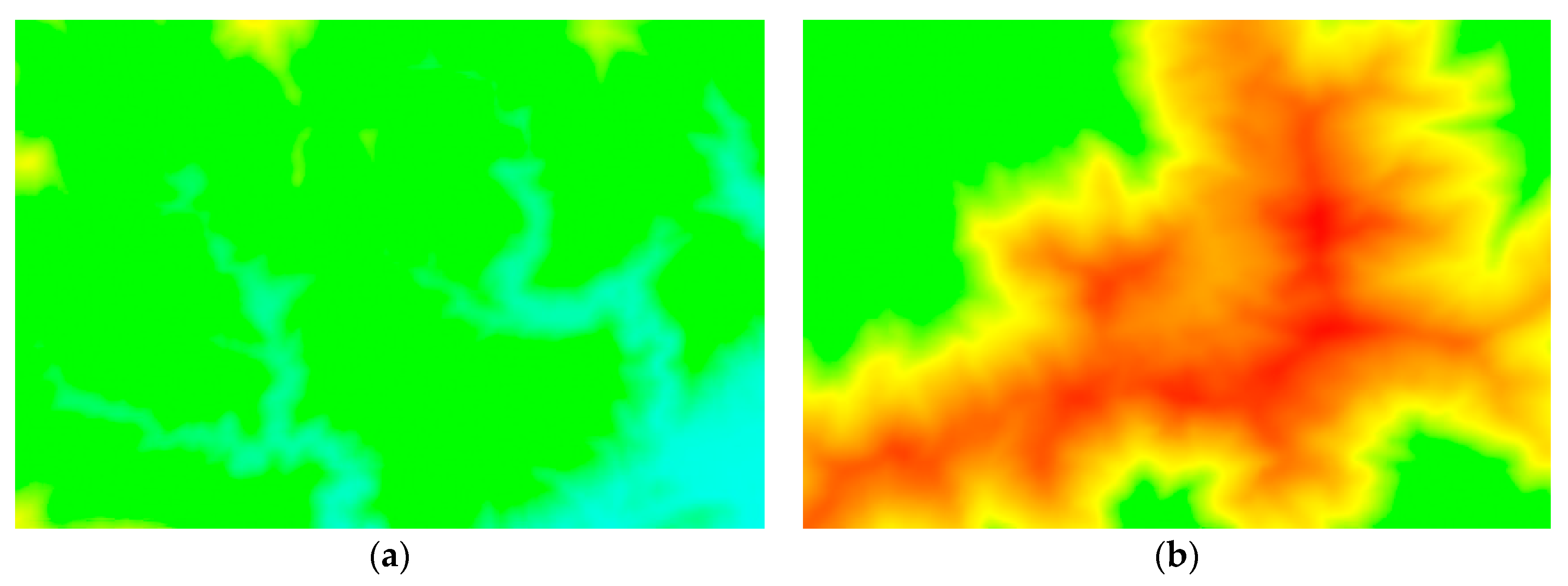
3.1. Elevation Data Pooling
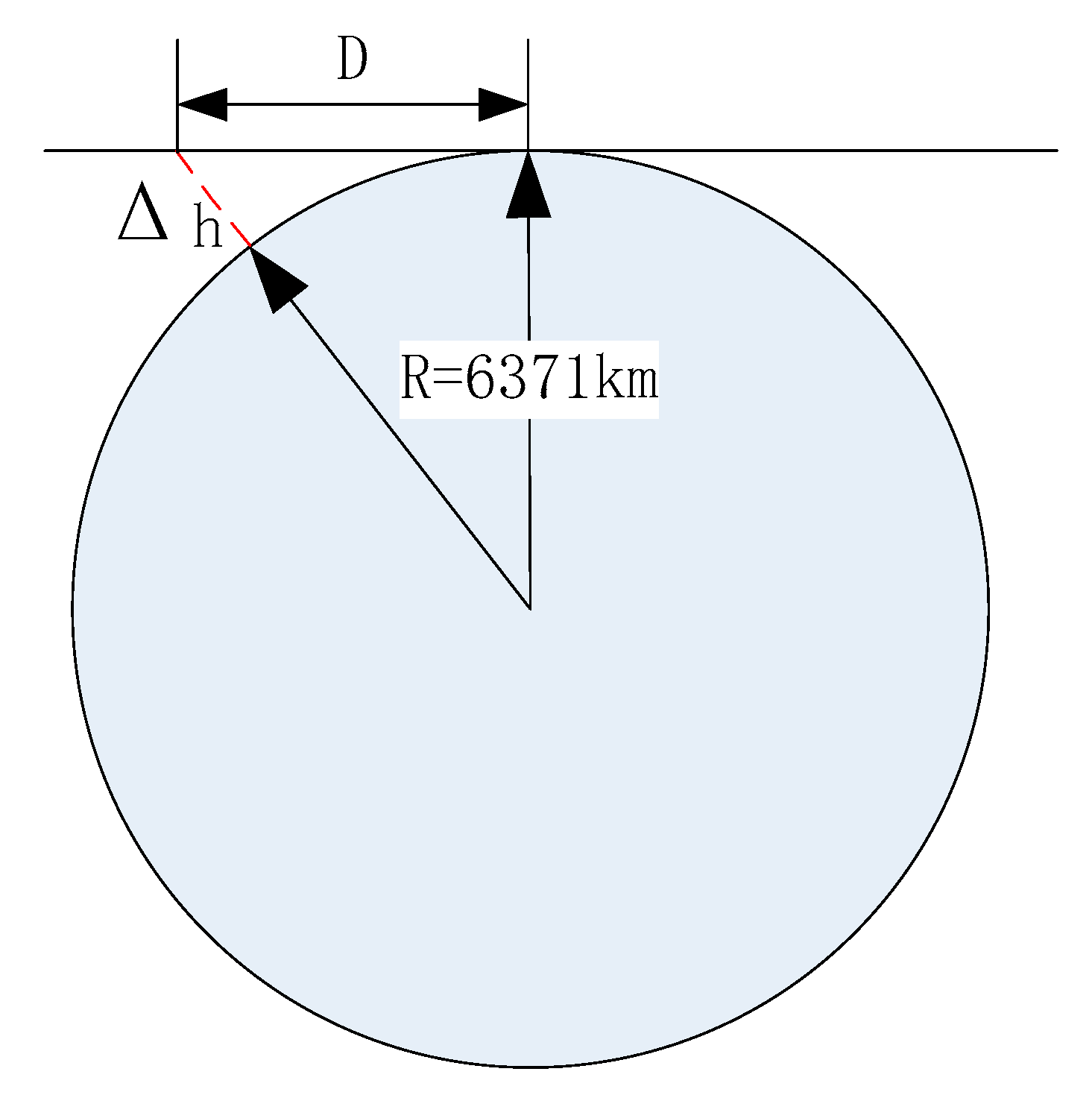
3.2. Digital Elevation Model (DEM) Data Correction
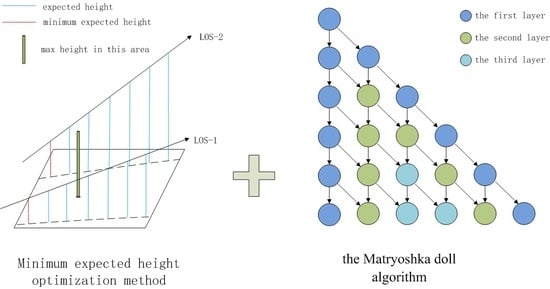
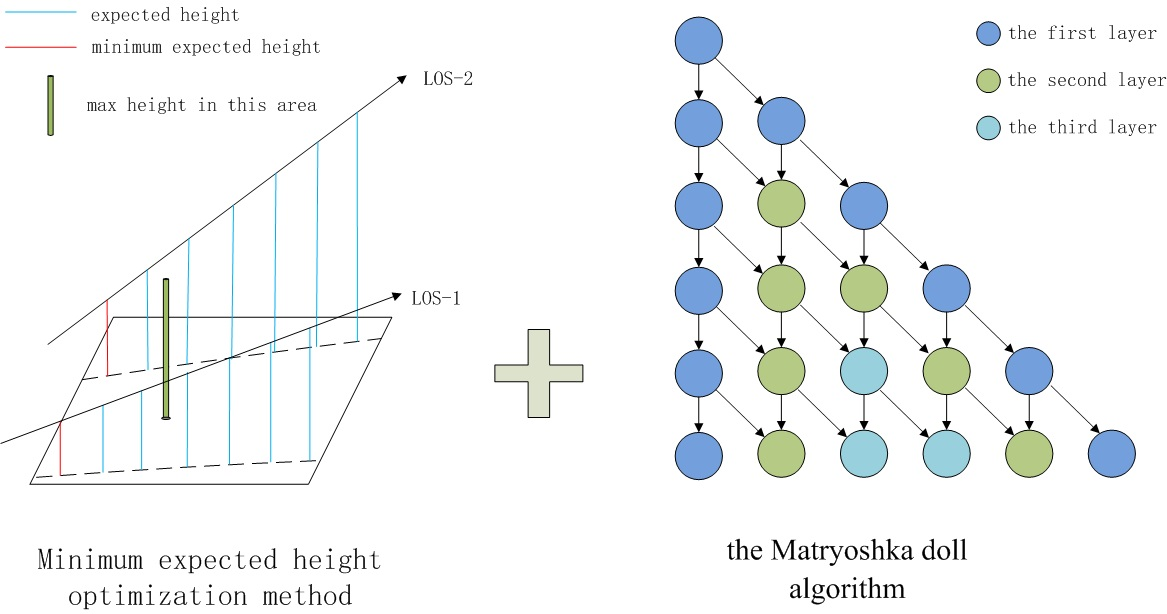
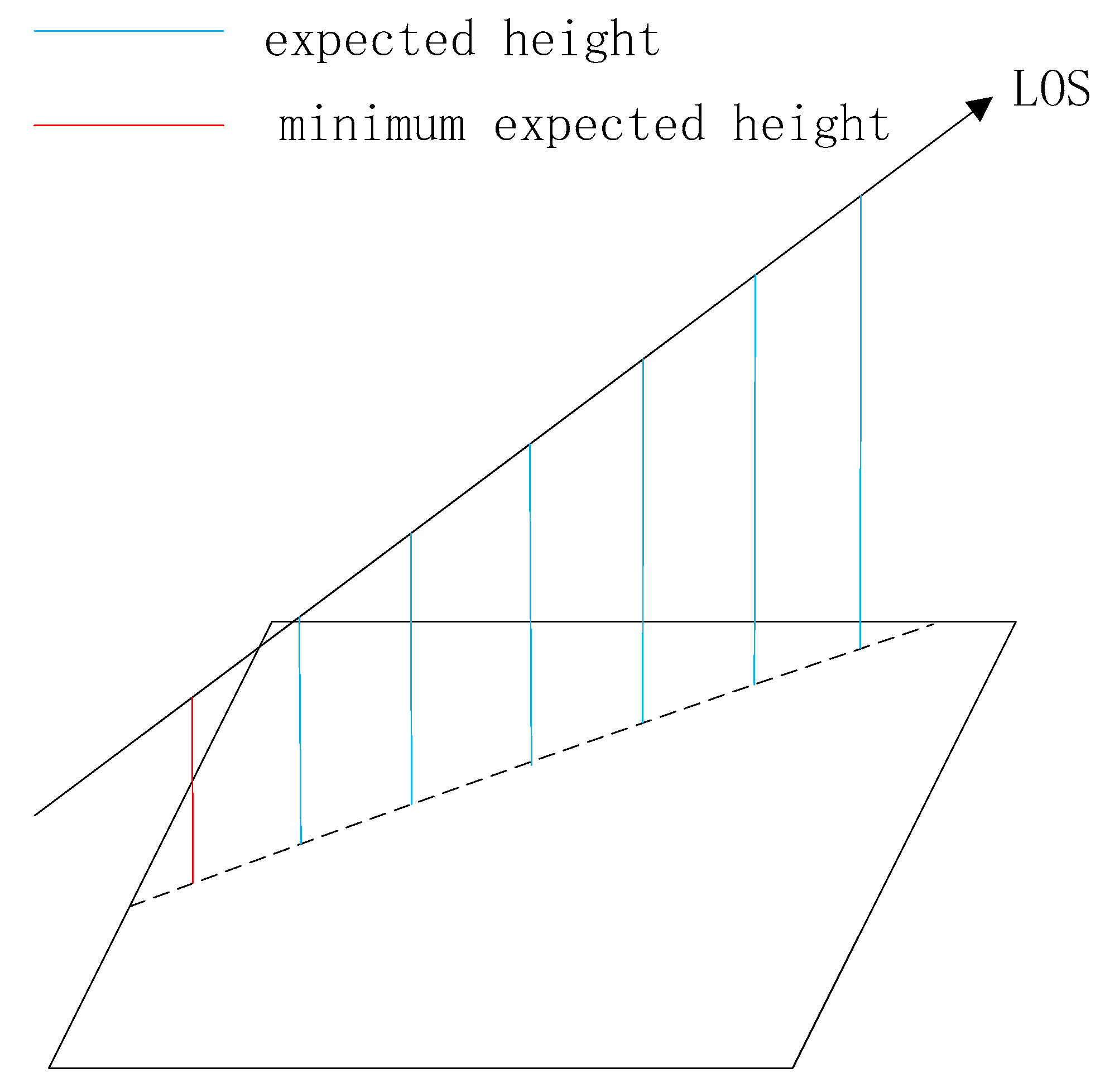
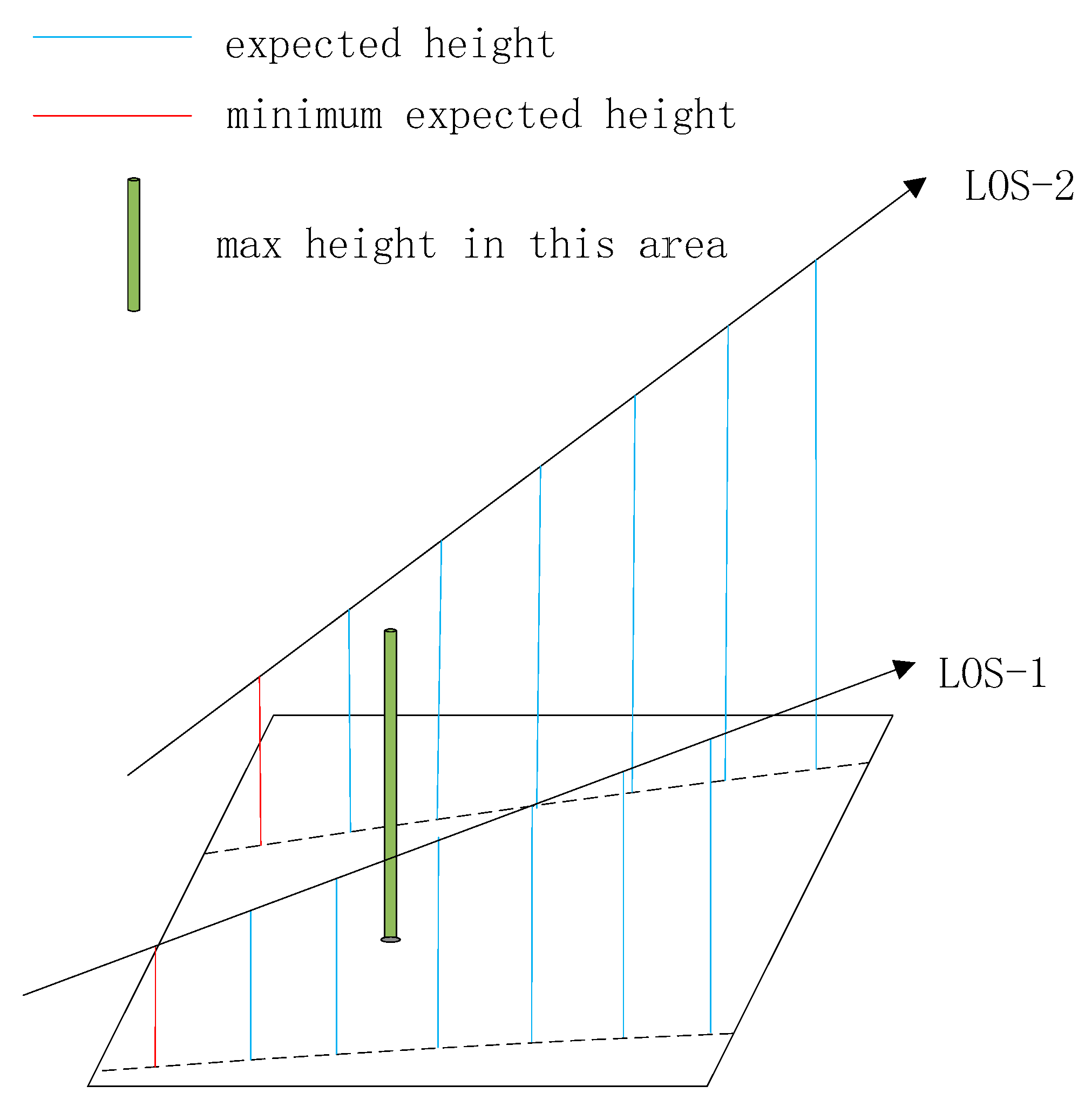
3.3. Minimum Expected Height
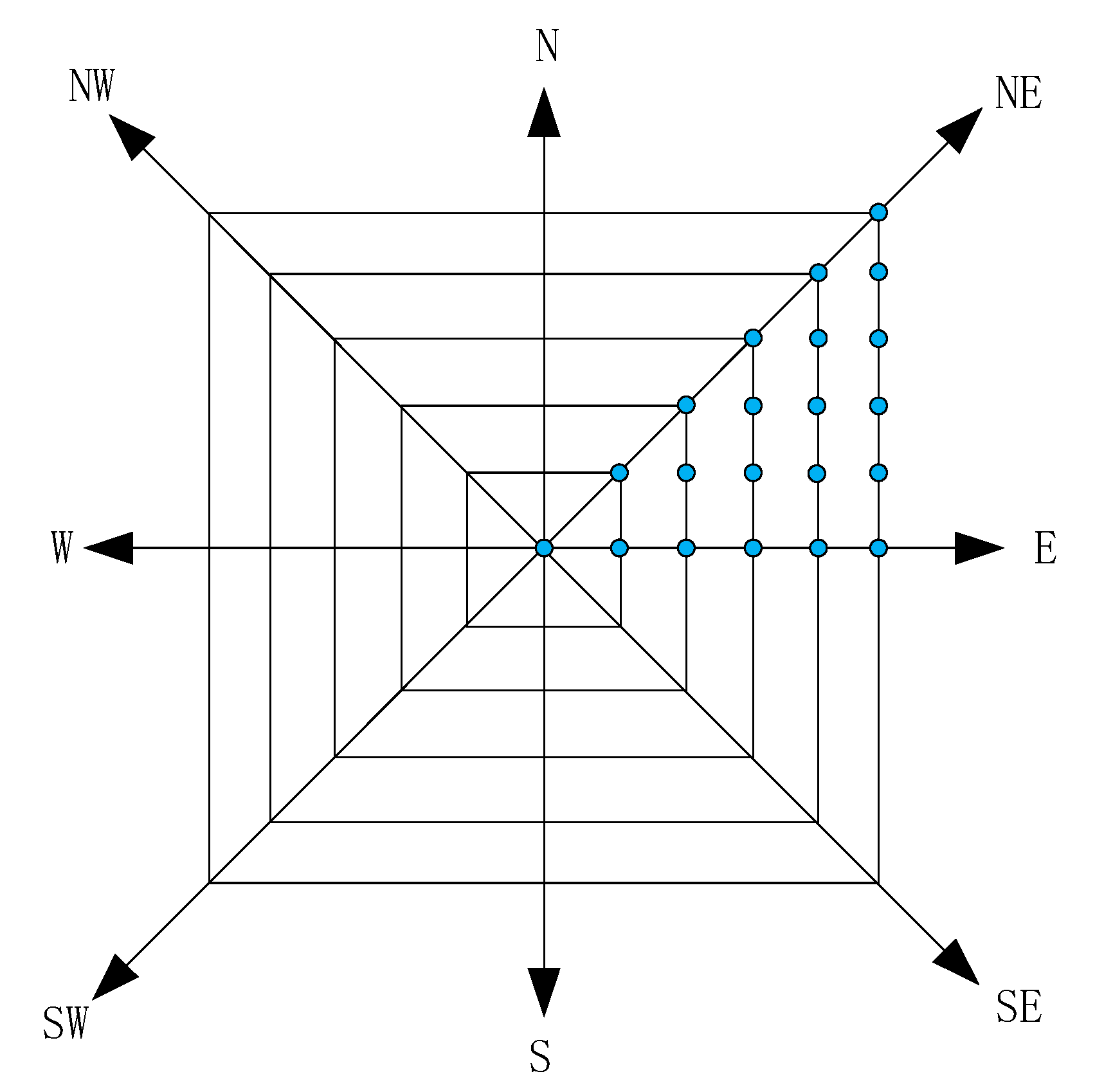
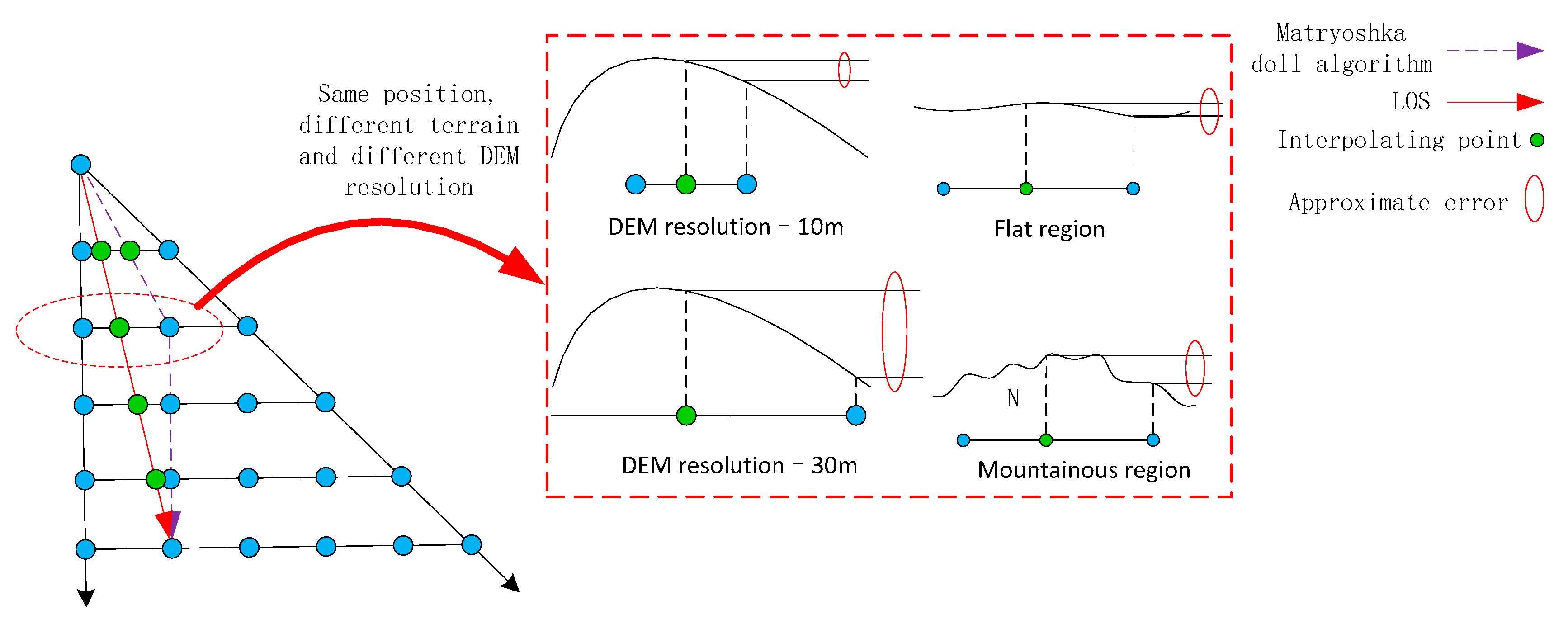
3.4. Matryoshka Doll Algorithm
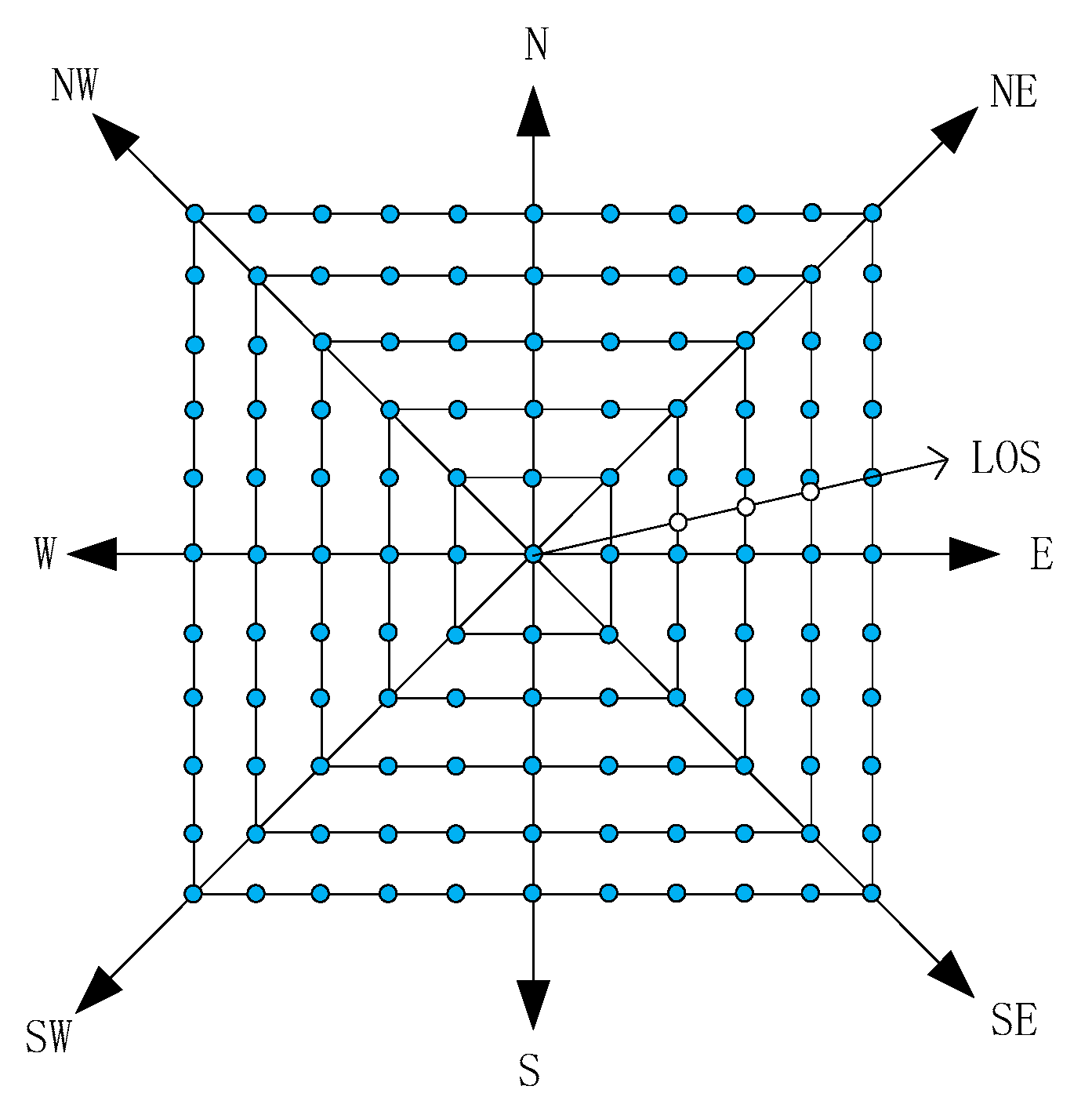
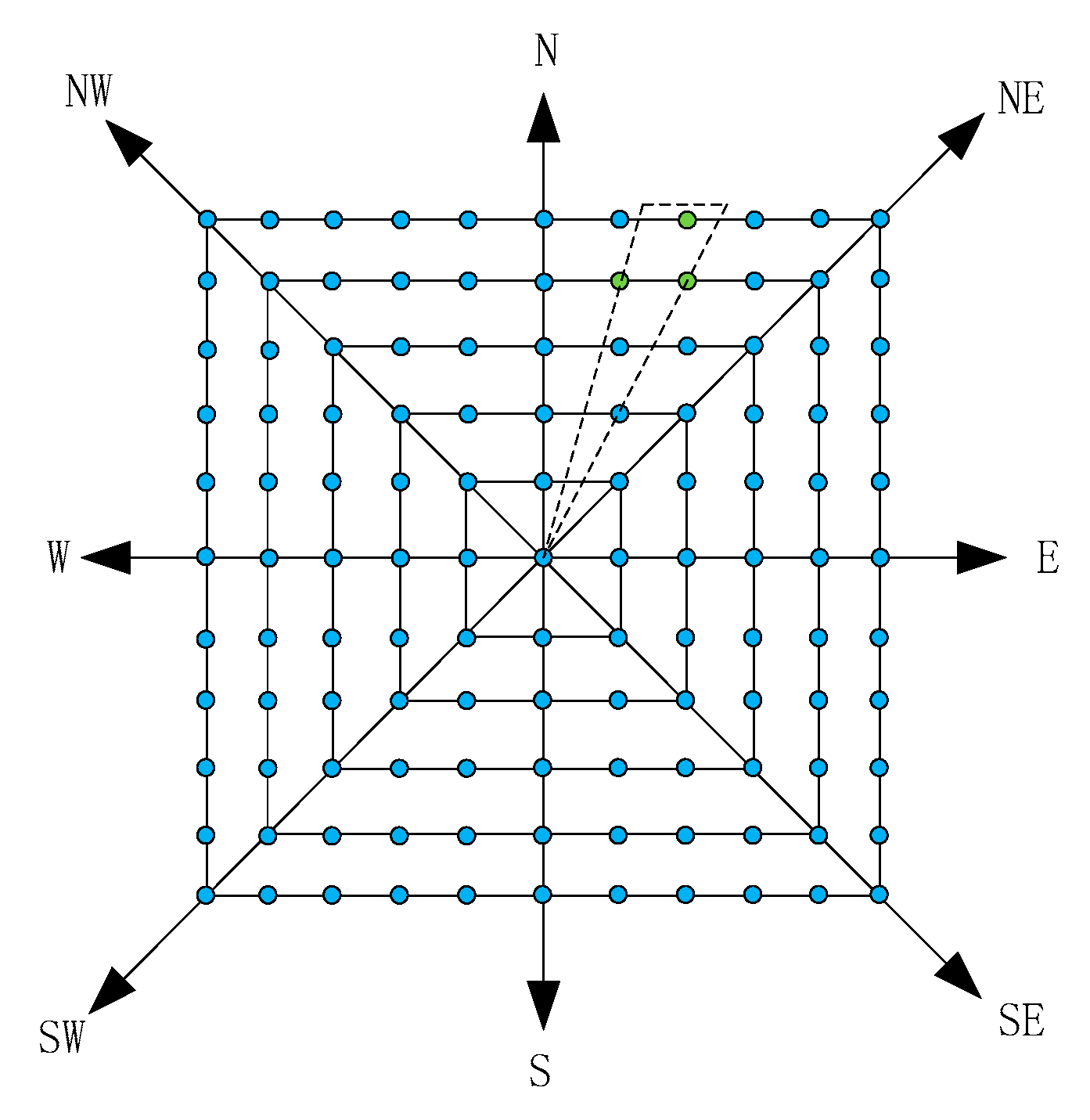
3.5. Determining the Range of Visual Fields by Fork Multiplication
4. Experiment and Analysis
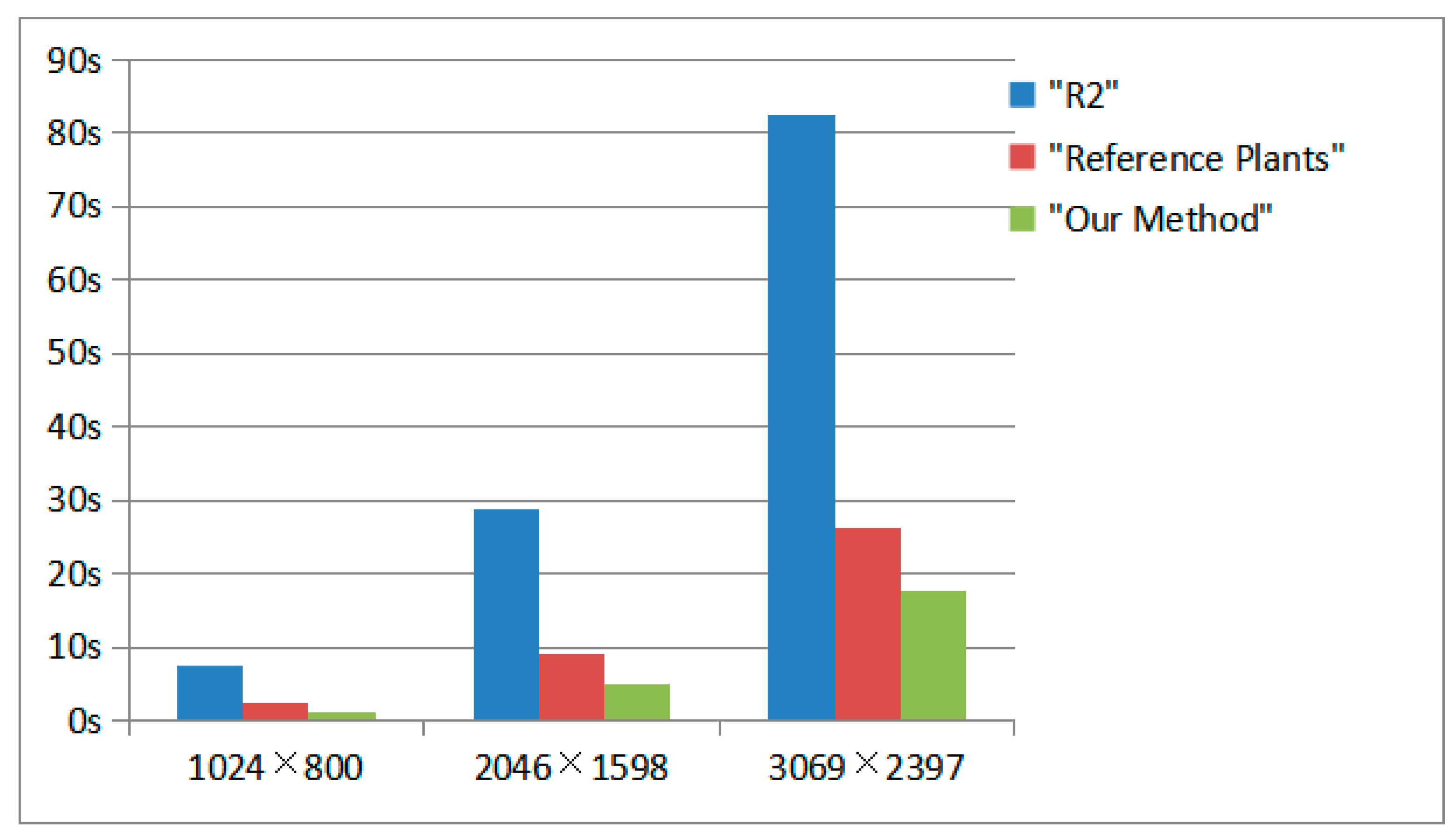
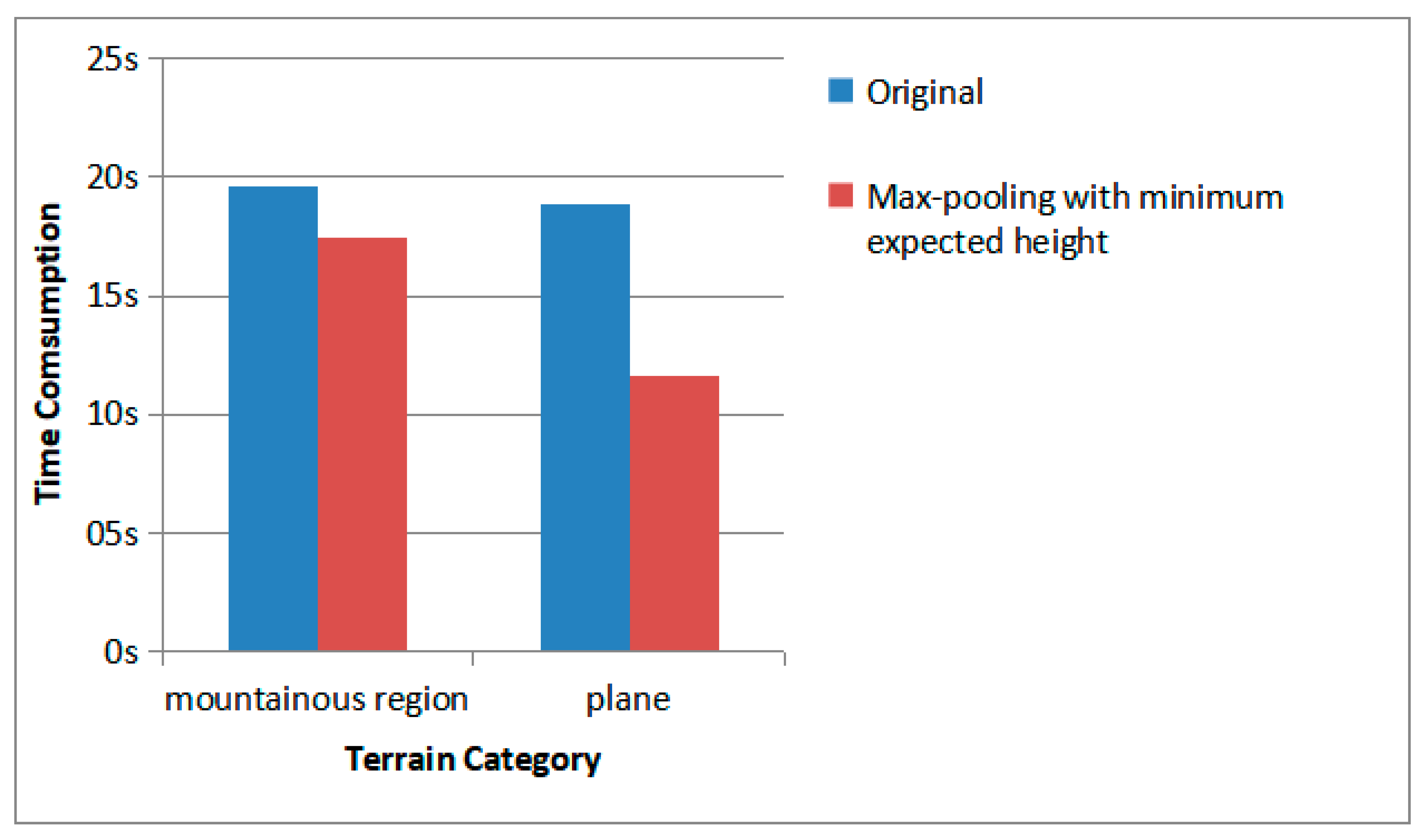
4.1. Analysis of Computational Time
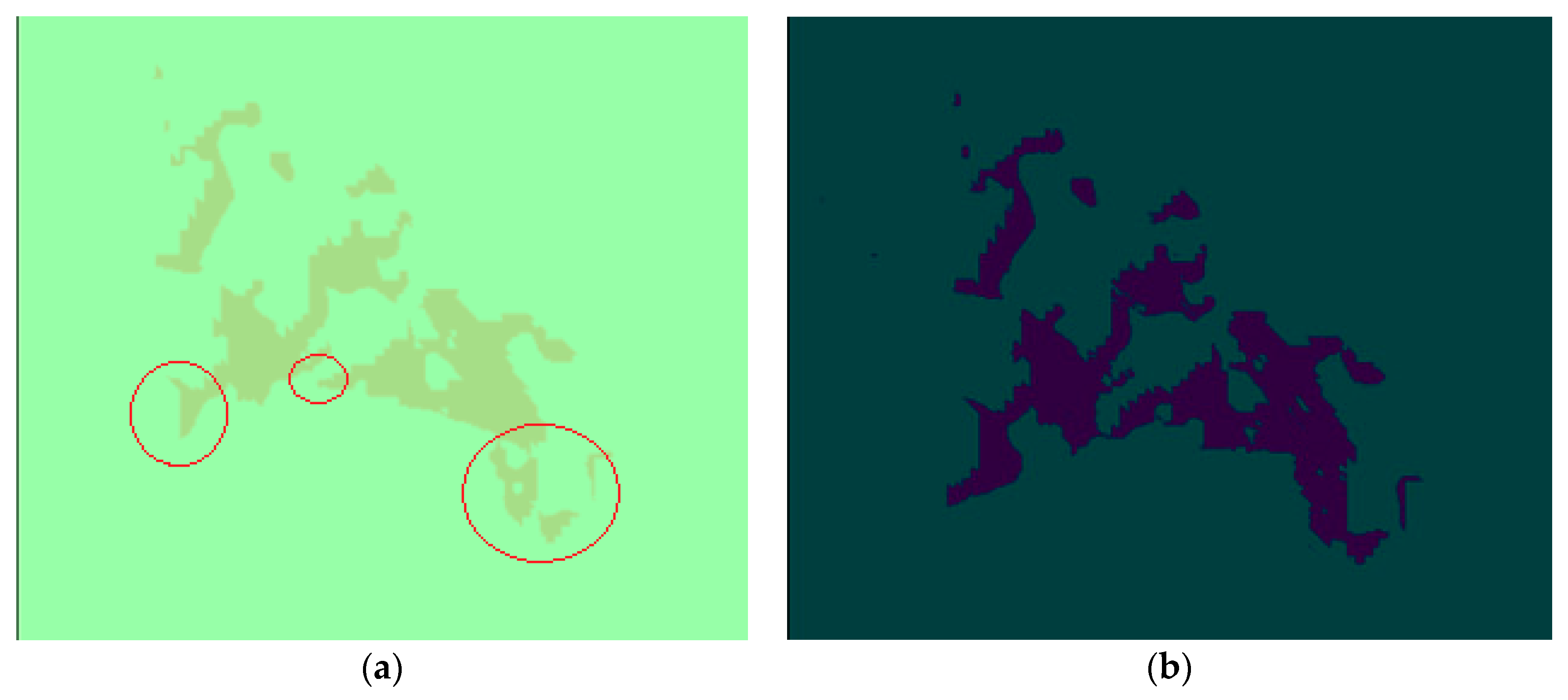
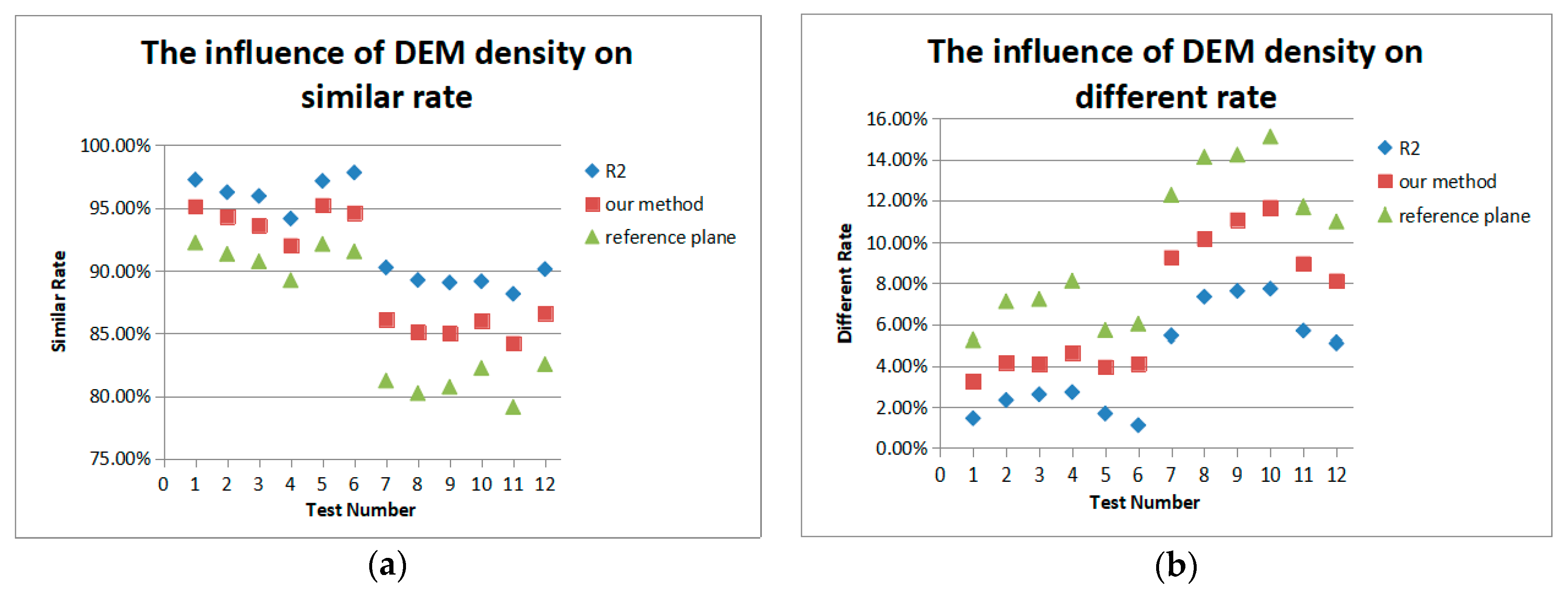
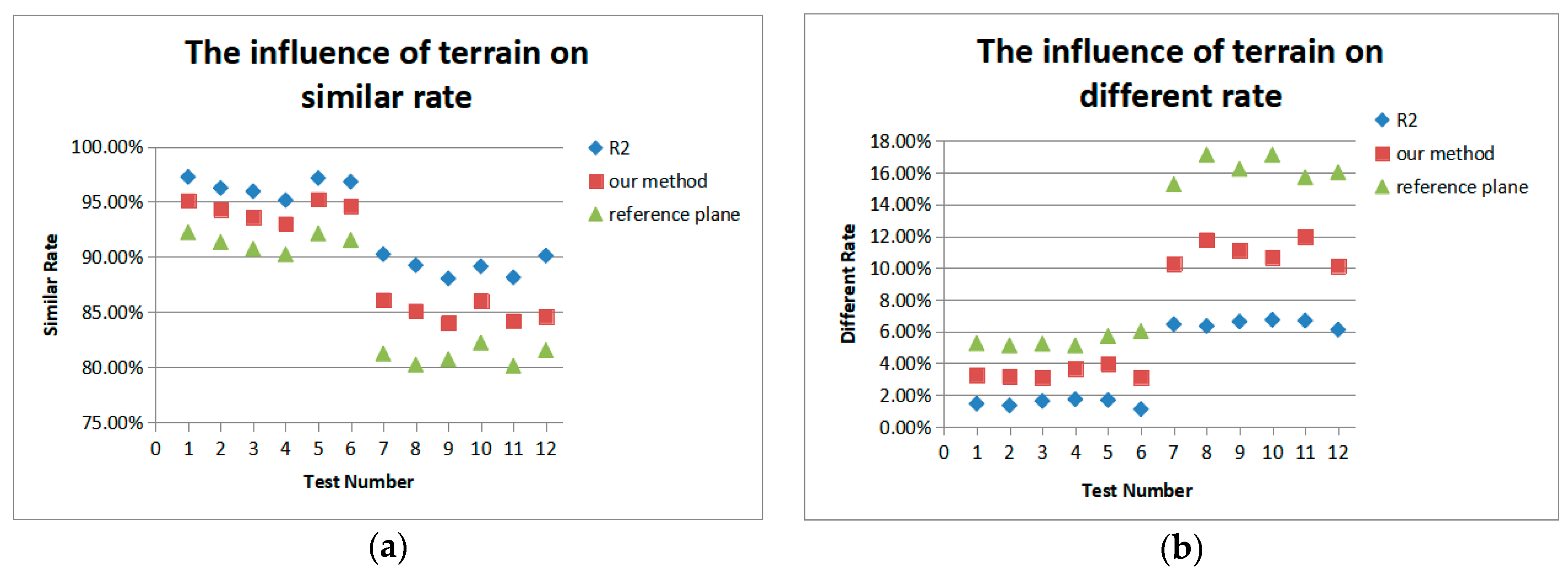
4.2. Accuracy Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Floriani, L.; Magillo, P. Algorithms for visibility computation on terrains: A survey. Environ. Plan. B Plan. Des. 2003, 30, 709–728. [Google Scholar] [CrossRef]
- Cillis, G.; Statuto, D.; Picuno, P. Vernacular Farm Buildings and Rural Landscape: A Geospatial Approach for Their Integrated Management. Sustainability 2020, 12, 4. [Google Scholar] [CrossRef]
- Palmer, J.F. The contribution of a GIS-based landscape assessment model to a scientifically rigorous approach to visual impact assessment. Landsc. Urban Plan. 2019, 189, 80–90. [Google Scholar] [CrossRef]
- López-Sánchez, N.; Gómez-González, J.I. The Shrines of Gadir (Cadiz, Spain) as References for Navigation. GIS Visibility Analysis. Open Archaeol. 2019, 5, 284–308. [Google Scholar] [CrossRef]
- Cervilla, A.R.; Tabik, S.; Vías, J.; Mérida, M.; Romero, L.F. Total 3D-viewshed Map: Quantifying the Visible Volume in Digital Elevation Models. Trans. GIS 2017, 21, 591–607. [Google Scholar] [CrossRef]
- Lee, K.Y.; Seo, J.I.; Kim, K.N.; Lee, Y.; Kweon, H.; Kim, J. Application of viewshed and spatial aesthetic analyses to forest practices for mountain scenery improvement in the Republic of Korea. Sustainability 2019, 11, 2687. [Google Scholar] [CrossRef]
- Tabik, S.; Zapata, E.L.; Romero, L.F. Simultaneous computation of total viewshed on large high resolution grids. Int. J. Geogr. Inf. Sci. 2013, 27, 804–814. [Google Scholar] [CrossRef]
- Hao-Nguyen, T.; Duy, T.N.; Tra-Duong, A. A new algorithm for viewshed computation on raster terrain. In Proceedings of the 2018 2nd International Conference on Recent Advances in Signal Processing, Telecommunications & Computing (SigTelCom 2018), Ho Chi Minh, Vietnam, 29–31 January 2018; pp. 56–60. [Google Scholar]
- Heritage, G.L.; Milan, D.J.; Large, A.R.G.; Fuller, I.C. Influence of survey strategy and interpolation model on DEM quality. Geomorphology 2009, 112, 334–344. [Google Scholar] [CrossRef]
- Zhao, Y.; Padmanabhan, A.; Wang, S. A parallel computing approach to viewshed analysis of large terrain data using graphics processing units. Int. J. Geogr. Inf. Sci. 2013, 27, 363–384. [Google Scholar] [CrossRef]
- Zhou, Q.; Chen, Y. Generalization of DEM for terrain analysis using a compound method. ISPRS J. Photogramm. Remote Sens. 2011, 66, 38–45. [Google Scholar] [CrossRef]
- Lv, P.; Zhang, J.; Lu, M.; Li, L. Terrain Visibility Analysis Based on Line of Sight. Comput. Eng. Appl. 2006, 8. [Google Scholar]
- Floriani, L.D.; Marzano, P.; Puppo, E. Line-of-sight communication on terrain models. Int. J. Geogr. Inf. Syst. 1994, 8, 329–342. [Google Scholar] [CrossRef]
- Franklin, W.R.; Ray, C.K.; Mehta, S. Geometric algorithms for siting of air defense missile batteries. Res. Proj. Battle 1994, 2756. [Google Scholar]
- Kaučič, B.; Zalik, B. Comparison of viewshed algorithms on regular spaced points. In Proceedings of the 18th Spring Conference on Computer Graphics, Budmerice, Slovakia, 24–27 April 2002; pp. 177–183. [Google Scholar]
- Franklin, W.R.; Ray, C. Higher isn’t necessarily better: Visibility algorithms and experiments. In Advances in GIS Research, Proceedings of the Sixth International Symposium on Spatial Data Handling, Edinburgh, Scotland, 5–9 September 1994; Taylor & Francis: Abingdon, UK, 1994; Volume 2, pp. 751–770. [Google Scholar]
- Wang, J.; Robinson, G.J.; White, K. Generating viewsheds without using sightlines. Photogramm. Eng. Remote Sens. 2000, 66, 87–90. [Google Scholar]
- Wu, H.; Pan, M.; Yao, L.; Luo, B. A partition-based serial algorithm for generating viewshed on massive DEMs. Int. J. Geogr. Inf. Sci. 2007, 21, 955–964. [Google Scholar] [CrossRef]
- Ferreira, C.R.; Andrade, M.V.A.; Magalhães, S.V.G.; Franklin, W.R.; Pena, G.C. A parallel algorithm for viewshed computation on grid terrains. J. Inf. Data Manag. 2014, 5, 171. [Google Scholar]
- Osterman, A. Implementation of the r.cuda.los Module in the Open Source GRASS GIS by Using Parallel Computation on the NVIDIA CUDA Graphic Cards. Elektrotehniski Vestn. 2012, 79, 19–24. [Google Scholar]
- Heyns, A.M.; Van Vuuren, J.H. Terrain visibility-dependent facility location through fast dynamic step-distance viewshed estimation within a raster environment. In Proceedings of the 2013 Annual Conference of the Operations Research Society of South Africa, Stellenbosch, South Africa, 15–18 September 2013; pp. 112–121. Available online: http://connection.ebscohost.com/c/proceedings/96160513/42nd-orssa-annual-conference (accessed on 5 October 2020).
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the 26th Annual Conference on Neural Information Processing Systems Conference, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. Available online: http://conference.researchbib.com/view/event/10123 (accessed on 5 October 2020).
- Dou, W.; Li, Y.; Wang, Y. A fine-granularity scheduling algorithm for parallel XDraw viewshed analysis. Earth Sci. Inform. 2018, 11, 433–447. [Google Scholar] [CrossRef]
- Fisher, P.F. Algorithm and implementation uncertainty in viewshed analysis. Int. J. Geogr. Inf. Syst. 1993, 7, 331–347. [Google Scholar] [CrossRef]
- Chambat, F.; Valette, B. Mean radius, mass, and inertia for reference Earth models. Phys. Earth Planet. Inter. 2001, 124, 237–253. [Google Scholar] [CrossRef]
- Or, D.C.; Shaked, A. Visibility and Dead-Zones in Digital Terrain Maps. Comput. Graph. Forum 1995, 14, 171–180. [Google Scholar] [CrossRef]
- Yu, J.; Wu, L.; Hu, Q.; Yan, Z.; Zhang, S. A synthetic visual plane algorithm for visibility computation in consideration of accuracy and efficiency. Comput. Geosci. 2017, 109, 315–322. [Google Scholar] [CrossRef]
- Gesch, D.; Oimoen, M.; Greenlee, S. The National Elevation Dataset. Photogramm. Eng. Remote Sens. 2002, 68, 5–32. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance (km) | 1 | 2 | 5 | 10 | 15 | 20 | 30 |
|---|---|---|---|---|---|---|---|
| Height error (m) | 0.078 | 0.314 | 1.96 | 7.85 | 17.66 | 31.4 | 70.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Tang, J.; Tjahjadi, T.; Wu, Z.; Xiao, X. A Novel Rapid Method for Viewshed Computation on DEM through Max-Pooling and Min-Expected Height. ISPRS Int. J. Geo-Inf. 2020, 9, 633. https://doi.org/10.3390/ijgi9110633
Pan Z, Tang J, Tjahjadi T, Wu Z, Xiao X. A Novel Rapid Method for Viewshed Computation on DEM through Max-Pooling and Min-Expected Height. ISPRS International Journal of Geo-Information. 2020; 9(11):633. https://doi.org/10.3390/ijgi9110633
Chicago/Turabian StylePan, Zhibin, Jin Tang, Tardi Tjahjadi, Zhihu Wu, and Xiaoming Xiao. 2020. "A Novel Rapid Method for Viewshed Computation on DEM through Max-Pooling and Min-Expected Height" ISPRS International Journal of Geo-Information 9, no. 11: 633. https://doi.org/10.3390/ijgi9110633
APA StylePan, Z., Tang, J., Tjahjadi, T., Wu, Z., & Xiao, X. (2020). A Novel Rapid Method for Viewshed Computation on DEM through Max-Pooling and Min-Expected Height. ISPRS International Journal of Geo-Information, 9(11), 633. https://doi.org/10.3390/ijgi9110633