Automatic (Tactile) Map Generation—A Systematic Literature Review


Abstract
1. Introduction
1.1. Background of Tactile Maps and Automatic Map Generation
1.2. Existing Literature Reviews and Motivation
- What are the latest achievements and innovations in this field?
- What are the gaps in current research (if any)?
- Who currently conducts research on automatic (tactile) map generation?
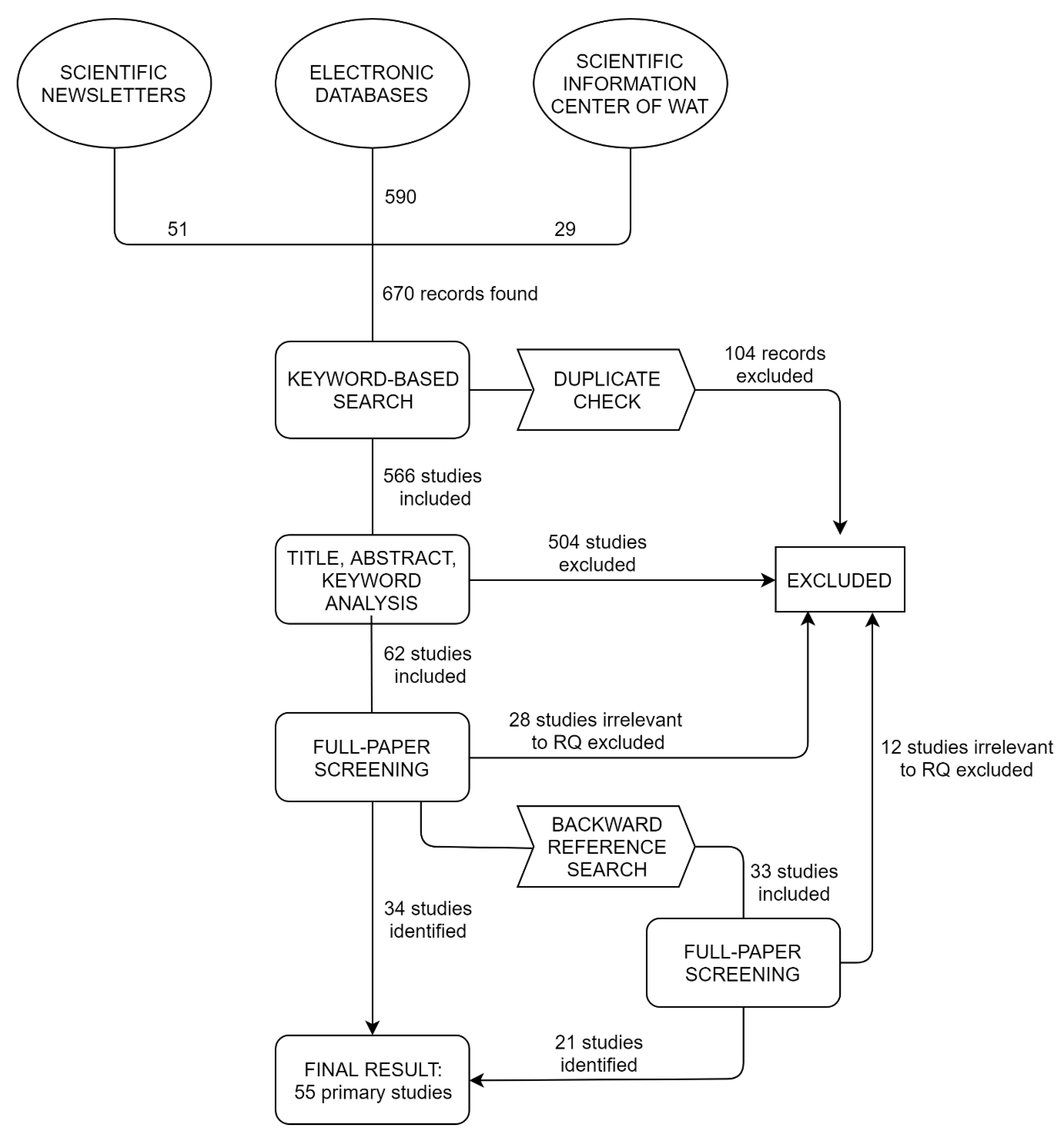
2. Review Methodology
- RQ1: What are the generalization methods and models for automatic tactile/thematic/background map generation?
- RQ2: What are the existing systems and solutions allowing automatic (tactile) map generation?
- RQ3: How to design spatial databases for automatic map generation?
3. Review Results
3.1. Research Question 1—What are the Generalization Methods and Models for Automatic Tactile/Thematic/Background Map Generation?
3.2. Research Question 2—What Are the Existing Systems and Solutions Allowing Automatic (Tactile) Map Generation?
3.3. Research Question 3—How to Properly Design Spatial Databases for Automatic Map Generation?
4. Discussion
- Despite various existing generalization algorithms and models, a holistic solution that would be able to process the entire map at once does not exist;
- There is no collaboration between researchers and NMAs dealing with this topic. Many of the working solutions were never implemented outside the country of origin;
- The existing solutions for automatic tactile map generation are based on unmodified data. Spatial data has to be transformed into the form legible for the blind and visually impaired first;
- There are no existing solutions for generating automatic thematic tactile map that could be used in education;
- Despite the existence of the European Union INSPIRE Directive, the spatial databases of EU member countries are still not fully compatible.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Robinson, A.H.; Morrison, J.L.; Muehrcke, P.C.; Kimerling, J.A.; Guptill, S.C. Elements of Cartography, 6th ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Stoter, J.; Baella, B.; Blok, C.; Burghardt, D.; Duchêne, C.; Pla, M.; Regnauld, N.; Touya, G. State-of-the-Art of Automated Generalisation in Commercial Software; Report of EuroSDR: Brussels, Belgium, 2010. [Google Scholar]
- Ojala, S.; Lahtinen, R.; Hirn, H. Tactile Maps-Safety and Usability in Building Sustainable Health Ecosystems. In Proceedings of the 6th International Conference on Well-Being in the Information Society, WIS, Tampere, Finland, 16–18 Septeber 2016; pp. 15–22. [Google Scholar]
- Bourne, R.R.; Flaxman, S.R.; Braithwaite, T.; Cicinelli, M.V.; Das, A.; Jonas, J.B.; Naidoo, K. Magnitude, temporal trends, and projections of the global prevalence of blindness and distance and near vision impairment: A systematic review and meta-analysis. Lancet Glob. Heal. 2017, 5, e888–e897. [Google Scholar] [CrossRef]
- Blades, M.; Spencer, C.; Ungar, S. Map use by adults with visual impairments. Prof. Geogr. 1999, 51, 539–553. [Google Scholar] [CrossRef]
- Dyck, P.; Feldman, E.; Vinik, A. Diabetic Neuropathies: The Nerve Damage of Diabetes; Report of Center for Integrated Healthcare: Wilmington, NC, USA, 2008. [Google Scholar]
- O’Modhrain, S.; Giudice, N.A.; Gardner, J.A.; Legge, G.E. Designing media for visually-impaired users of refreshable touch displays: Possibilities and pitfalls. IEEE Trans. Haptics 2015, 8, 248–257. [Google Scholar] [CrossRef] [PubMed]
- Villey, P. Maurice de La Sizeranne: Aveugle, Bienfaiteur des Aveugles (Classic Reprint); Forgotten Books: London, UK, 2018. [Google Scholar]
- Braille Authority of North America and Canadian Braille Authority. Guidelines and Standards for Tactile Graphics; Braille Authority of North America and Canadian Braille Authority: Pittsburgh, PA, USA, 2011. [Google Scholar]
- Perkins, C. Cartography: Progress in tactile mapping. Prog. Hum. Geogr. 2002, 26, 521–530. [Google Scholar] [CrossRef]
- Voženílek, V.; Vondráková, A. Tactile Maps Based on 3D Printing Technology. In Proceedings of the International Scientifical Conference, Gabrovo, Bulgaria, 23–24 May 2014; Volume 3. [Google Scholar]
- ATMAPS. Available online: https://www.atmaps.eu/index.php (accessed on 14 June 2019).
- Accessible Graphics. Available online: http://accessiblegraphics.org/ (accessed on 6 May 2019).
- Ducasse, J.; Brock, A.; Jouffrais, C. Accessible Interactive Maps for Visually Impaired Users. In Mobility of Visually Impaired People: Fundamentals and ICT Assistive Technologies; Pissaloux, E., Velázquez, R., Eds.; Springer: Berlin, Germany, 2017; pp. 537–576. [Google Scholar]
- Lobben, A.; Lawrence, M. The Use of Environmental Features on Tactile Maps by Navigators Who Are Blind. Prof. Geogr. 2012, 64, 95–108. [Google Scholar] [CrossRef]
- Yanoff, M.; Duker, J.S. Ophthalmology, 3rd ed.; Mosby Elsevier: Maryland Heights, MO, USA, 2009. [Google Scholar]
- Klatzky, R.L.; Lederman, S.J. Touch. In Handbook of Psychology, Volume 4: Experimental Psychology; Healy, A.F., Proctor, R.W., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003; p. 151. [Google Scholar]
- Więckowska, E.; Ogórek, J.; Jakubowski, M.; Pawłowska, I.; Talukder, A.; Kauba, K. Instrukcja tworzenia i adaptowania ilustracji i materiałów tyflograficznych dla uczniów niewidomych; Available online: http://pzn.org.pl/wp-content/uploads/2016/07/instrukcja_tworzenia_i_adaptowania_ilustracji_i_materialow_tyflograficznych_dla_niewidomych.pdf (accessed on 26 June 2019).
- Edman, P. Tactile Graphics; American Foundation for the Blind: New York, NY, USA, 1992. [Google Scholar]
- Rowell, J.; Ungar, S. The World Of Touch: Results of an International Survey of Tactile Maps and Symbols. Cartogr. J. 2003, 40, 259–263. [Google Scholar] [CrossRef]
- Balley, S.; Baella, B.; Sidonie, C.; Pla, M.; Regnauld, N.; Stoter, J. Map Specifications and user requirements. In Abstracting Geographic Information in a Data Rich World; Burghardt, D., Ed.; Springer International Publishing: Berlin, Germany, 2014; pp. 17–52. [Google Scholar]
- Armstrong, M.P. Active symbolism: Toward a new theoretical paradigm for statistical cartography. Cartogr. Geogr. Inf. Sci. 2018, 46, 72–81. [Google Scholar] [CrossRef]
- Kitchin, R.; Thrift, N.; Mackaness, W.; Chaudhry, O. Generalisation. In International Encyclopedia of Human Geography; Kitchin, R., Thrift, N., Eds.; Elsevier: Amsterdam, The Netherlands, 2009; pp. 345–354. [Google Scholar]
- Kazemi, S.; Lim, S.; Rizos, C. A review of map and spatial database generalization for developing a generalization framework. In Proceedings of the 10th Congress of the International Society for Photogrammetry & Remote Sensing, Istanbul, Turkey, 12–23 July 2004; pp. 1221–1226. [Google Scholar]
- Brassel, K.E.; Weibel, R. A review and conceptual framework of automated map generalization. Int. J. Geogr. Inf. Syst. 1988, 2, 229–244. [Google Scholar] [CrossRef]
- Nickerson, B.G. Automated Cartographic Generalization For Linear Features. Cartographica 1988, 25, 16–66. [Google Scholar] [CrossRef]
- Meyer, U. Software-developments for compter-assisted generalization. In Proceedings of the Auto-Carto London, London, UK, 14–19 September 1986; pp. 247–256. [Google Scholar]
- McMaster, R.B.; Shea, K.S. Generalization in Digital Cartography; Association of American Geographers: Washington, DC, USA, 1992. [Google Scholar]
- Mackaness, W.; Burghardt, D.; Duchêne, C. Map Generalization. In International Encyclopedia of Geography: People, the Earth, Environment and Technology; Richardson, D., Castree, N., Goodchild, M., Kobayashi, A., Liu, W., Marston, R., Eds.; Willey: Malden, MA, USA, 2017; pp. 1–16. [Google Scholar]
- Steiger, E.; De Albuquerque, J.P.; Zipf, A. An Advanced Systematic Literature Review on Spatiotemporal Analyses of Twitter Data. Trans. GIS 2015, 19, 809–834. [Google Scholar] [CrossRef]
- Klonner, C.; Marx, S.; Usón, T.; Porto de Albuquerque, J.; Höfle, B. Geo-Information Volunteered Geographic Information in Natural Hazard Analysis: A Systematic Literature Review of Current Approaches with a Focus on Preparedness and Mitigation. Int. J. Geoinf. 2016, 5, 7. [Google Scholar] [CrossRef]
- Huang, Q.; Yang, X.; Gao, B.; Yang, Y.; Zhao, Y. Application of DMSP/OLS Nighttime Light Images: A Meta-Analysis and a Systematic Literature Review. Remote Sens. 2014, 6, 6844–6866. [Google Scholar] [CrossRef]
- Kitchenham, B.A.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering. Version 2.3; ACM Press: New York, NY, USA, 2007. [Google Scholar]
- Greenhalgh, T. Papers that summarise other papers (systematic reviews and meta-analyses). BMJ 1997, 315, 672–675. [Google Scholar] [CrossRef] [PubMed]
- Okoli, C.; Schabram, K. A Guide to Conducting a Systematic Literature Review of Information Systems Research. Work. Pap. Inf. Syst. 2010, 10, 1–51. [Google Scholar] [CrossRef]
- Mendeley-Reference Management Software & Researcher Network. Available online: https://www.mendeley.com (accessed on 14 May 2019).
- Yaoming, Y.; Xiaoan, T.; Zhe, G.; Haiyan, J. A general geo-spatial multi-scale conceptual model for automatic generalization. In Proceedings of the 2009 International Conference on Environmental Science and Information Application Technology, Wuhan, China, 4–5 July 2009. [Google Scholar]
- Stoter, J.; Post, M.; Van Altena, V.; Nijhuis, R.; Bruns, B. Fully automated generalization of a 1:50 k map from 1:10 k data. Cartogr. Geogr. Inf. Sci. 2014, 41, 1–13. [Google Scholar] [CrossRef]
- Touya, G.; Christophe, S.; Favreau, J.M.; Rhaiem, A.B. Automatic derivation of on-demand tactile maps for visually impaired people: First experiments and research agenda. Int. J. Cartogr. 2018, 9333, 1–25. [Google Scholar] [CrossRef]
- van Eck, N.J.; Waltman, L. VOSviewer Manual, Version 1.6.9; Universiteit Leiden: Leiden, The Netherlands, 2018. [Google Scholar]
- Dilo, A.; Van Oosterom, P.; Hofman, A. Constrained tGAP for generalization between scales: The case of Dutch topographic data. Comput. Environ. Urban Syst. 2009, 33, 388–402. [Google Scholar] [CrossRef]
- Duchêne, C.; Baella, B.; Brewer, C.A.; Burghardt, D.; Buttenfield, B.P.; Gaffuri, J.; Pla, M. Generalisation in Practice Within National Mapping Agencies. In Abstracting Geographic Information in a Data Rich World, Lecture Notes in Geoinformation and Cartography; Burghardt, D., Duchêne, C., Mackaness, W., Eds.; Springer: Berlin, Germany, 2014. [Google Scholar]
- Dimov, D.; Palomar, J.M.; Ruiz, L.A. Automated generalization of land-use data with GIS-based programming. Gis. Sci. Z. Geoinformatik 2014, 3, 109–120. [Google Scholar]
- Touya, G.; Girres, J.F. ScaleMaster 2.0: A ScaleMaster extension to monitor automatic multi-scales generalizations. Cartogr. Geogr. Inf. Sci. 2013, 40, 192–200. [Google Scholar] [CrossRef]
- Kazemi, S.; Lim, S.; Paik, H. Generalization Expert System (GES): A Knowledge-Based Approach for Generalization of Line and Polyline Spatial Datasets. In Proceedings of the Surveying & Spatial Sciences Institute Biennial International Conference, Adelaide, Australia, 28 September–2 October 2009; pp. 717–729. [Google Scholar]
- Benz, S.A.; Weibel, R. Road network selection for medium scales using an extended stroke-mesh combination algorithm. Cartogr. Geogr. Inf. Sci. 2014, 41, 323–339. [Google Scholar] [CrossRef]
- Wei, Z.; He, J.; Wang, L.; Wang, Y.; Guo, Q. A Collaborative Displacement Approach for Spatial Conflicts in Urban Building Map Generalization. IEEE Access 2018, 6, 26918–26929. [Google Scholar] [CrossRef]
- Štampach, R.; Mulíčková, E. Automated generation of tactile maps. J. Maps 2016, 12, 532–540. [Google Scholar] [CrossRef]
- Reimer, A. Cartographic Modelling for Automated Map Generation. Ph.D. Thesis, Eindhoven University, Eindhoven, The Netherlands, 2015. [Google Scholar]
- Takagi, N.; Chen, J. Development of a computer-aided system for automating production of tactile maps and its usability evaluation. In Proceedings of the World Automation Congress Proceedings, Waikoloa, HI, USA, 3–7 August 2014. [Google Scholar]
- Berli, J.; Touya, G.; Lokhat, I.; Regnauld, N. Experiments to Distribute Map Generalization Processes. In Proceedings of the 28th International Cartographic Conference, ICC 2017, Washington, DC, USA, 2–7 July 2017. [Google Scholar]
- Daoud, J.J.A.; Doytsher, Y. An Automated Cartographic Generalization Process: A Pseudo-Physical Model. In Proceedings of the 21th Congress of the International Society for Photogrammetry and Remote Sensing, Commission II, Beijing, China, 3–11 July 2008. [Google Scholar]
- Weiss, G. Multiagent Systems. A Modern Approach to Distributed Modern Approach to Artificial Intelligence; the MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Yan, J.; Guilbert, E.; Saux, E. An ontology-driven multi-agent system for nautical chart generalization. Cartogr. Geogr. Inf. Sci. 2017, 44, 201–215. [Google Scholar] [CrossRef]
- Gaffuri, J. Field deformation in an agent-based generalisation model: The GAEL model. GI Days 2007, 30, 1–24. [Google Scholar]
- Duchêne, C.; Ruas, A.; Cambier, C. The CartACom model: Transforming cartographic features into communicating agents for cartographic generalisation. Int. J. Geogr. Inf. Sci. 2012, 26, 1533–1562. [Google Scholar] [CrossRef]
- Touya, G.; Bucher, B.; Falquet, G.; Jaara, K.; Steiniger, S. Modelling Geographic Relationships in Automated Environments. In Abstracting Geographic Information in A Data Rich World: Methodologies and Applications of Map Generalisation; Burghardt, D., Duchêne, C., Mackaness, W., Eds.; Springer: Berlin, Germany, 2014; pp. 53–82. [Google Scholar]
- Duchêne, C. The CartACom model: A generalisation model for taking relational constraints into account. In Proceedings of the 7th ICA Workshop on Generalisation and Multiple Representation, Leicester, UK, 20–21 August 2004; pp. 1–11. [Google Scholar]
- Touya, G.; Duchêne, C. CollaGen: Collaboration between automatic cartographic Generalisation Processes. In Advances in Cartography and GIScience Volume 1; Ruas, A., Ed.; Springer: Berlin, Germany, 2011; pp. 541–558. [Google Scholar]
- Dumont, M.; Touya, G.; Duchêne, C. Automated Generalisation of Intermediate Levels in a Multi-Scale Pyramid. In Proceedings of the 18th ICA Workshop on Generalisation and Multiple Representation, Rio de Janeiro, Brazil, 21 August 2015; pp. 1–8. [Google Scholar]
- Van Oosterom, P.; Meijers, M.; Stoter, J.; Šuba, R. Data Structures for Continuous Generalisation: tGAP and SSC. In Abstracting Geographic Information in a Data Rich World: Methodologies and Applications of Map Generalisation; Burghardt, D., Duchêne, C., Mackaness, W., Eds.; Springer: Berlin, Germany, 2014; pp. 83–117. [Google Scholar]
- Roth, R.E.; Brewer, C.A.; Stryker, M.S. A typology of operators for maintaining legible map designs at multiple scales. Cartogr. Perspect. 2011, 68, 29–64. [Google Scholar] [CrossRef]
- Foerster, T.; Stoter, J.; Köbben, B. Towards a formal classification of generalization operators. In Proceedings of the 23th international cartographic conference ICC 2007, Moscow, Russia, 4–10 August 2007. [Google Scholar]
- Gould, N.; Mackaness, W. From taxonomies to ontologies: Formalizing generalization knowledge for on-demand mapping. Cartogr. Geogr. Inf. Sci. 2015, 43, 208–222. [Google Scholar] [CrossRef]
- Foerster, T.; Stoter, J.; Kraak, M.J. Automated Generalisation at European Mapping Agencies: A Qualitative and Quantitative Analysis. Cartogr. J. 2013, 47, 41–54. [Google Scholar] [CrossRef]
- Neun, M.; Burghardt, D.; Weibel, R. Automated processing for map generalization using web services. Geoinformatica 2009, 13, 425–452. [Google Scholar] [CrossRef]
- Duchêne, C.; Gaffuri, J. Combining Three Multi-agent Based Generalisation Models-AGENT, CartACom and GAEL. In Headway in Spatial Data Handling; Ruas, A., Gold, C., Eds.; Springer: Berlin, Germany, 2008; pp. 277–296. [Google Scholar]
- Revell, P.; Regnauld, N.; Bulbrooke, G. OS VectorMapTM District: Automated Generalisation, Text Placement and Conflation in Support of Making Public Data Public. In Proceedings of the 25th International Cartographic Conference ICC 2011, Paris, France, 3–8 July 2011. [Google Scholar]
- Kopf, J.; Agrawala, M.; Bargeron, D.; Salesin, D.; Cohen, M. Automatic generation of destination maps. ACM Trans. Graph. 2010, 29, 1–12. [Google Scholar] [CrossRef]
- Červenka, P.; Břinda, K.; Hanousková, M.; Hofman, P.; Seifert, R. Blind friendly maps: Tactile maps for the blind as a part of the public map portal (Mapy.cz). In Proceedings of the 15th International Conference on Computers Helping People with Special Needs ICCHP 2016, Linz, Austria, 13–15 July 2016; pp. 1–8. [Google Scholar]
- Chen, J.; Takagi, N. A Pattern Recognition Method for Automating Tactile Graphics Translation from Hand-Drawn Maps. In Proceedings of the IEEE: International Conference on Systems, Man, and Cybernetics-SMC 2013, Manchester, UK, 13–16 October 2013; pp. 4173–4178. [Google Scholar]
- Watanabe, T.; Yamaguchi, T.; Koda, S.; Minatani, K. Tactile Map Automated Creation System Using OpenStreetMap. In Proceedings of the 14th International Conference on Computers Helping People with Special Needs, Paris, France, 9–11 July 2014; pp. 42–49. [Google Scholar]
- Schürer, D.; Gerhardt, S. AdV-Project ATKlS-Generalisation - Automatic line displacement for topographic maps 1:50,000. Kartogr. Nachr. 2010, 60, 251–258. [Google Scholar]
- Grabler, F.; Agrawala, M.; Sumner, R.W.; Pauly, M. Automatic generation of tourist maps. ACM Trans. Graph. 2008, 27, 1–11. [Google Scholar] [CrossRef]
- Lafay, S.; Braun, A.; Chandler, D.; Michaud, M.; Ricaud, L.; Mustière, S. Automatic mapping and innovative on-demand mapping services at IGN France. Cartogr. Geogr. Inf. Sci. 2015, 42, 54–68. [Google Scholar] [CrossRef]
- Götzelmann, T.; Eichler, L. Blindweb maps–an interactive web service for the selection and generation of personalized audio-tactile maps. In Proceedings of the 15th International Conference on Computers Helping People with Special Needs ICCHP 2016, Linz, Austria, 13–15 July 2016; pp. 139–145. [Google Scholar]
- Götzelmann, T.; Pavkovic, A. Towards automatically generated tactile detail maps by 3D printers for blind persons. In Proceedings of the 14th International Conference on Computers Helping People with Special Needs, Paris, France, 9–11 July 2014; pp. 1–7. [Google Scholar]
- Götzelmann, T. Visually Augmented Audio-Tactile Graphics for Visually Impaired People. ACM Trans. Access. Comput. 2018, 11, 1–31. [Google Scholar] [CrossRef]
- Taylor, B.; Dey, A.; Siewiorek, D.; Smailagic, A. Customizable 3D Printed Tactile Maps as Interactive Overlays. In Proceedings of the ASSETS’16, Reno, NV, USA, 23–26 October 2016; pp. 71–79. [Google Scholar]
- Hänßgen, D.; Waldt, N.; Weber, G. Empirical Study on Quality and Effectiveness of Tactile Maps Using HaptOSM System. In Proceedings of the 15th International Conference on Computers Helping People with Special Needs ICCHP 2016, Linz, Austria, 13–15 July 2016; pp. 153–159. [Google Scholar]
- Hänßgen, D. HaptOSM-Creating tactile maps for the blind and visually impaired. In Mensch und Computer 2015-Workshopband; Weisbecker, A., Burmester, M., Schmidt, A., Eds.; De Gruyter: Stuttgart, Germany, 2015; pp. 405–410. [Google Scholar]
- Stoter, J.; van Smaalen, J.; Nijhuis, R.; Dortland, A.; Bulder, J.; Bruns, B. Fully automated generalisation of topographic data in current geo-information environments. In Urban and Regional Data Management-UDMS Annual, 1st ed.; Zlatanova, S., Ledoux, H., Fendel, E., Rumor, M., Eds.; Taylor & Francis: London, UK, 2011; pp. 111–121. [Google Scholar]
- Wang, Z.; Li, B.; Hedgpeth, T.; Haven, T. Instant Tactile-Audio Map: Enabling Access to Digital Maps for People with Visual Impairment. In Proceedings of the ASSETS’09, Pittsburgh, PA, USA, 26–28 October 2009; pp. 43–50. [Google Scholar]
- Thiemann, F.; Sester, M. An Automatic Approach for Generalization of Land-Cover Data from Topographic Data. In Trends in Spatial Analysis and Modelling: Decision-Support and Planning Strategies; Behnisch, M., Meinel, G., Eds.; Springer: Berlin, Germany, 2018; pp. 193–207. [Google Scholar]
- TactileMaps.Net. Available online: http://www.tactilemaps.net/ (accessed on 14 May 2019).
- BlindWeb.org-Research for Blind Persons. Available online: http://maps.blindweb.org/ (accessed on 14 May 2019).
- Girres, J.F.; Touya, G. Quality Assessment of the French OpenStreetMap Dataset. Trans. GIS 2010, 14, 435–459. [Google Scholar] [CrossRef]
- Mapy.cz. Available online: https://hapticke.mapy.cz/ (accessed on 14 May 2019).
- Ducasse, J.; Macé, M.; Jouffrais, C. From open geographical data to tangible maps: Improving the accessibility of maps for visually impaired people. ISPRS 2015, 40, 517–523. [Google Scholar] [CrossRef]
- Miele, J.A.; Landau, S.; Gilden, D. Talking TMAP: Automated generation of audio-tactile maps using Smith-Kettlewell’s TMAP software. Br. J. Vis. Impair. 2006, 24, 93–100. [Google Scholar] [CrossRef]
- Voženílek, V. Hypsometry in tactile maps. In True 3D in Cartography; Buchroithner, M., Ed.; Springer: Berlin, Germany, 2012; pp. 153–168. [Google Scholar]
- Schwarzbach, F.; Sarjakoski, T.; Oksanen, J.; Sarjakoski, L.T.; Weckman, S. Physical 3D models from LIDAR data as tactile maps for visually impaired persons. In True 3D in Cartography; Buchroithner, M., Ed.; Springer: Berlin, Germany, 2012; pp. 169–183. [Google Scholar]
- Šuba, R. Design and Development of a System for Vario-Scale Maps. Ph.D. Thesis, TU Delft, Delft, The Netherlands, 2017. [Google Scholar]
- Sielicka, K.; Karsznia, I. Automation of the spatial data generalization process as implementation of provisions of the INSPIRE directive. Rocz. Geomatyki 2018, 2, 141–152. [Google Scholar]
- Karsznia, I.; Przychodzeń, M.; Sielicka, K. Methodology of the automatic generalization of buildings, road networks, forests and surface waters: A case study based on the Topographic Objects Database in Poland. Geocarto Int. 2018. [Google Scholar] [CrossRef]
- Hofman, A. Developing a Vario-Scale IMGeo Using the Constrained tGAP Structure. Ph.D. Thesis, TU Delft, Delft, The Netherlands, 2008. [Google Scholar]
- Xiang, L.; Huang, J.; Shao, X.; Wang, D. A MongoDB-Based Management of Planar Spatial Data with a Flattened R-Tree. ISPRS Int. J. GeoInf. 2016, 5, 7. [Google Scholar] [CrossRef]
- Stoter, J.; Burghardt, D.; Duchêne, C.; Baella, B.; Bakker, N.; Blok, C.; Schmid, S. Methodology for evaluating automated map generalization in commercial software. Comput. Environ. Urban Syst. 2009, 33, 311–324. [Google Scholar] [CrossRef]
- Boedecker, M. Coordination of different map themes using cartographic relations. Int. J. Geoinf. 2014, 10, 39–47. [Google Scholar]
- Jaara, K.; Duchêne, C.; Ruas, A. Preservation and Modification of Relations Between Thematic and Topographic Data Throughout Thematic Data Migration Process. In Cartography from Pole to Pole: Selected Contributions to the 26th Conference of the ICA, Dresden 2013; Buchroithner, M., Prechtel, N., Burghardt, D., Eds.; Springer: Berlin, Germany, 2014; pp. 103–117. [Google Scholar]
- Kazemi, S.; Forghani, A.; Cho, G.; McQueen, K.G. Integrated cartographic and algorithmic approach for road network database generalisation. Int. J. Geoinform. 2013, 9, 4. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOURCE | URL | DATE OF SEARCH | SEARCH RESULTS |
|---|---|---|---|
| FREEFULLPDF | http://www.freefullpdf.com | 1 August 2018 | 38 |
| GOOGLE SCHOLAR | http://scholar.google.com | 31 July 2018 | 137 |
| IEEE LIBRARY | http://www.ieeexplore.ieee.org | 1 August 2018 | 85 |
| SCOPUS | https://www.scopus.com | 31 July 2018 | 176 |
| SPRINGER | https://link.springer.com | 1 August 2018 | 48 |
| WEB OF SCIENCE | http://www.webofknowledge.com | 31 July 2018 | 75 |
| WILLEY ONLINE LIBRARY | http://onlinelibrary.wiley.com | 1 August 2018 | 31 |
| OIN WAT * | n/a | 13 August 2018 | 29 |
| SCIENTIFIC NEWSLETTERS | n/a | n/a | 51 |
| Article | Generalization Algorithms | Generalization Models | Evaluation | Generalization Approach Overview |
|---|---|---|---|---|
| [37] | n/a | General multi-scale conceptual model | Tested on a sequence of maps of the Hunan lake region in China. | The authors propose multi-scale generalization operators. These are instructions for Agent’s auto-generalization. |
| [52] | “Forces” control and determine each object’s behavior (e.g., clustering, reshaping) | Pseudo-physical model (electric field theory) | Tested on a set of polyline and polygon objects in an urban area of Haifa in Israel. | The “power” of each object in any map is computed. It produces “forces” that act on objects and control them according to cartographic constraints. |
| [54] | n/a | Multi-Agent-System CartACom GAEL Agent-based | The approach is presented on sample bathymetric data in dedicated software. | Agents access cartographic knowledge stored in the ontology. The agent prepares different generalization plans regarding its environment. |
| [65] | The paper mentions NMAs that developed their own generalization algorithms, but it does not specify them. | n/a | n/a | Generalization operators used in NMAs in Europe. Which operators work best with certain feature types on maps, taking into account transitions between scales? |
| [60] | Morphing of lines, continuous deformation of polygons, continuous vario-scale generalization | tGAP Space-Scale Cube (SSC) structure | n/a | Providing intermediate levels to the multi-scale pyramid might allow smooth zooming and solve the problem of gaps between scales in existing map services. |
| [43] | Skeletonization, morphological filtering, majority filter, simulated annealing, SVM, neural networks, fuzzy logic, random seed points | n/a | Sample dataset of the Valencia region in Spain. The automatic method produced different results than the target dataset, but the results are promising. | Automatic generalization of land cover no-gaps polygon data from 1:1k to 1:25k scale. The methodology—several steps of aggregation of various feature types. |
| [66] | Least squares adjustment, energy minimization, simulated annealing | Agent-based | Tested on 99 sample urban blocks of Swisstopo data. Which of the eight tested operators were most frequently executed? | How to optimize a sequence of multiple generalization operators being applied to an entire set of map features? Eight operators in a sequence of maximum 20 steps were used. |
| [39] | Least squares algorithm, Douglas Pecker, Displacement algorithm (CartAGen) | Agent-based CartACom GAEL | Simple 3D printed map was created manually, followed by an attempt to obtain a similar map with use of automatic operations. The map was evaluated by experts. | Main research issues regarding models for automatic tactile map generation were identified. The authors concluded: no examples of automatic generalization, schematization and labelling in automatic tactile cartography. |
| [49] | A number of search algorithms are mentioned and others: Rotating calipers, Visvalingam–Whyatt, Douglas–Peucker, Imai–Iri, Reimer–Meulemans | Sliding label, fixed position label models Author’s multi-criteria model for point feature labelling | Author tests his algorithm for labelling different types of features and then compares the results with manually generated labels. | Analysis of cartographic design principles for automated map generation. It focuses on map features labelling and proposes a model for this task that follows defined requirements and constraints. |
| [59] | Simulated annealing, elastic beams, least squares algorithm | Agent-based GAEL Haunert | Tested on very diverse sample data in France, coming from the “Official Publication No 58 of Euro-SDR project.” | The authors propose “Collaborative Generalisation” (CG). Instead of creating models from scratch; they would like to see the existing models work together. |
| [67] | Elastic beams | Agent-based CartACom GAEL | n/a | Automated generalization of vector data is based on synergy between three existing multi-agent generalization models: AGENT, CartACom, GAEL. |
| [41] | Douglas–Peucker, Visvalingam–Whyatt | Constrained tGAP | Comparison of 1:10k scale data from constrained tGAP and existing 1:10k database. A number of issues were identified (to be fixed). | Constrained tGAP—model for deriving intermediate scales while having the same dataset available in two scales. What makes it different from tGAP standard is the way particular feature types are weighted. |
| [61] | Douglas–Peucker | tGAP Space-Scale-Cube | Three case studies presented varying in scale and type of data used. They are described in detail. | New approach to encode tGAP structure into SSC. This solution may support true smooth zoom generalization. However, there are still some open research questions. |
| [64] | n/a | n/a | Model based on case—visualization of road accident data. An attempt to formalize generalization (ontology). The results are promising. | Ontological modelling to articulate the knowledge used in automatic cartographic design. The authors try to create the ontology of generalization, which produces a map. |
| [45] | Douglas–Peucker, Douglas–Peucker–Peschier, Visvalingam–Whyatt | Generalization Expert System (GES) | Simplification of selected features from 1:250k to 1:500k map of Canberra, Australia. | Semi-automatic spatial data mining and generalization system for polygon and polyline data. Rule-based generalization expert system interfaced with ArcGIS. |
| [29] | Douglas–Peucker, Visvalingham–Whyatt, Gaussian line smoothing, Perkal’s E-circle rolling, least-squares fitting, spline interpolation, Fourier or wavelet transformation, skeletonization, center of gravity | Constraint-based | n/a | The authors seek an answer to the question: “can map generalization automatically produce maps at a range of scales with minimum human intervention?” It consists of a quick review of the existing generalization algorithms and operators and it discusses the potential usage and current research conducted within NMAs. |
| [57] | n/a | CartACom Topological relations: 4-intersection, 9-intersection, Region Connection Calculus | Three case studies are presented regarding spatial relations in various situations. The proposed model requires improvement in order to be useful for automatic processes. | The book chapter presents a model for spatial relations ontology. These relations can then be used in automatic processes such as generalization or on-demand mapping. They can be quantitative or predicate/binary. The authors also propose four types of relational constraints. |
| [68] | Growing tide, rural building “squared” amalgamation, weighted effective area algorithm | n/a | After releasing the alpha version of the product feedback was collected from users. The beta version includes their suggestions. | The authors present a new product developed mostly automatically—“OS VectorMap District.” Some of the generalization algorithms are also mentioned here. |
| [46] | Stroke-based, mesh-based, combined stoke-mesh, graph-theoretic, extended DBSCAN | Constraint-based (soft/hard constraints) | Evaluated by professional cartographers. Only 5–10% of the objects would need to be corrected manually. | Algorithm proposed for automated road network selection (transformation from 1:10k to 1:50k. Although it was designed for Swisstopo, it should work for other NMAs. |
| [44] | Least squares, Douglas–Peucker, Gaussian smoothing, polygon merging, skeletonization, stroke-based road selection | ScaleMaster Agent-based | ScaleMaster 2.0 was tested on VMAP of Abéché region in Chad. Results show that this model can be used to automatically derive DCMs from a MRDB, using several generalization processes. | The article proposes an extension of the ScaleMaster model. The new version is a model that drives automatic generalization and is readable by a generalization system, while the original version only provided descriptions and left the work to the cartographer. |
| [47] | Collaborative displacement method, snake algorithm, elastic beams, | n/a | Two topographic data sets—urban building maps in the 1:5k and 1:25k scales. The results indicate that the proposed method is effective, but some limitations exist. | The proposed method combines aggregation, elimination and constrained reshape operators. Vector field-based displacement is adopted. If it fails, then the proposed method is used. |
| Article | Type of Maps | Operating Range | Tactile | Name | Study Overview |
|---|---|---|---|---|---|
| [50,71,72] | Orientation and navigation | Designed for Japan but would work everywhere (Range of OSM data) | Yes | Tactile Map Automated Creation System (TMACS) | Computer-aided platform for automatic translation of hand-drawn maps into tactile maps. In 2014 it was modified to handle OpenStreetMap data. |
| [73] | Topographic | Germany | No | ATKIS-Gen: Amtliches Topographisch-Kartographisches Informationssystem Generalisierung | Automatic generalization system using AGENT-Technology of 1Spatial. All the products are derived from basis DLM using model and cartographic generalization. |
| [48] | Orientation and navigation | City of Brno, Czech Republic | Yes | n/a | System used for partly automatic creation of a set of 1:2 500 orientation maps, ready for relief printing on microcapsule paper. Map sheets are combinable into larger areas. |
| [69] | Destination (navigation) | Wherever Bing Maps are available | No | Destination Maps under Map Apps (discontinued) | Fully automated system for creating destination maps that is based on principles used by mapmakers. The system simplifies selected roads, optimizes their position, scale and orientation, and adds geographic contextual information. |
| [74] | Tourist | Determined by the database content (e.g., 3D buildings) | No | n/a | Automatic generation of tourist maps based on an existing database, which is constantly updated (according to authors). |
| [75] | Topographic, Historical | Whole world (depends on map type selected) | No | Carte-a-la-carte | Existing system enabling customers to define a customized paper map (not free of charge). It is possible to include the title and a cover illustration (logo), using three kinds of maps. |
| [70] | Road atlas | Global | Yes | Mapy.cz | Conventional map underlays are adjusted so that they can be printed on microcapsule paper and used by blind people. |
| [76,77,78] | Orientation and navigation | Range of OSM data | Yes | Blindweb.org | Platform for automatic generation of tactile maps based on OSM. It allows creation of graphics for 3D printing (also audio-haptic overlays) and microcapsule paper. |
| [79] | Orientation and navigation | Range of OSM data | Yes | Tactilemaps.net | Complete end-to-end system that allows the blind and visually impaired to independently generate tactile maps. Users can either generate a 3D model or order a print. |
| [80,81] | Orientation and navigation | Range of OSM data | Yes | HaptOSM | The solution is a combination of specialized hardware and software based on OSM data that allows creating individual tactile maps almost entirely automatically. |
| [38,82] | Topographic | The Netherlands | No | n/a | Successful methodology for automatic derivation of 1:50k maps from 1:10k data. |
| [42] | Topographic | Catalonia, France, Germany, Switzerland, Great Britain, the U.S., the Netherlands, | No | n/a | Description of automated generalization carried out in seven chosen NMAs (maps, label placement). |
| [83] | Orientation and navigation | Range of MapQuest (not clearly specified) | Yes | n/a | System for automatic conversion of JPEG images into graphics that can be used in braille embossers and microcapsule paper. |
| [84] | Land cover | Germany | No | CLC-generator | Methodology of land-cover datasets automatic generalization from topographic data successfully implemented for conversion of Basis DLM into CORINE Land Cover. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wabiński, J.; Mościcka, A. Automatic (Tactile) Map Generation—A Systematic Literature Review. ISPRS Int. J. Geo-Inf. 2019, 8, 293. https://doi.org/10.3390/ijgi8070293
Wabiński J, Mościcka A. Automatic (Tactile) Map Generation—A Systematic Literature Review. ISPRS International Journal of Geo-Information. 2019; 8(7):293. https://doi.org/10.3390/ijgi8070293
Chicago/Turabian StyleWabiński, Jakub, and Albina Mościcka. 2019. "Automatic (Tactile) Map Generation—A Systematic Literature Review" ISPRS International Journal of Geo-Information 8, no. 7: 293. https://doi.org/10.3390/ijgi8070293
APA StyleWabiński, J., & Mościcka, A. (2019). Automatic (Tactile) Map Generation—A Systematic Literature Review. ISPRS International Journal of Geo-Information, 8(7), 293. https://doi.org/10.3390/ijgi8070293