NoiseModelling: An Open Source GIS Based Tool to Produce Environmental Noise Maps

 , , , and
, , , and
Abstract
:1. Introduction
2. Noise Mapping Issues
2.1. Existing Noise Mapping Solutions
2.2. Scientific and Technical Barriers
3. Noise Mapping Approach
3.1. Principle and Hypotheses
3.2. Noise Emission
3.2.1. Point Sources Decomposition
3.2.2. Sound Power Level Calculation
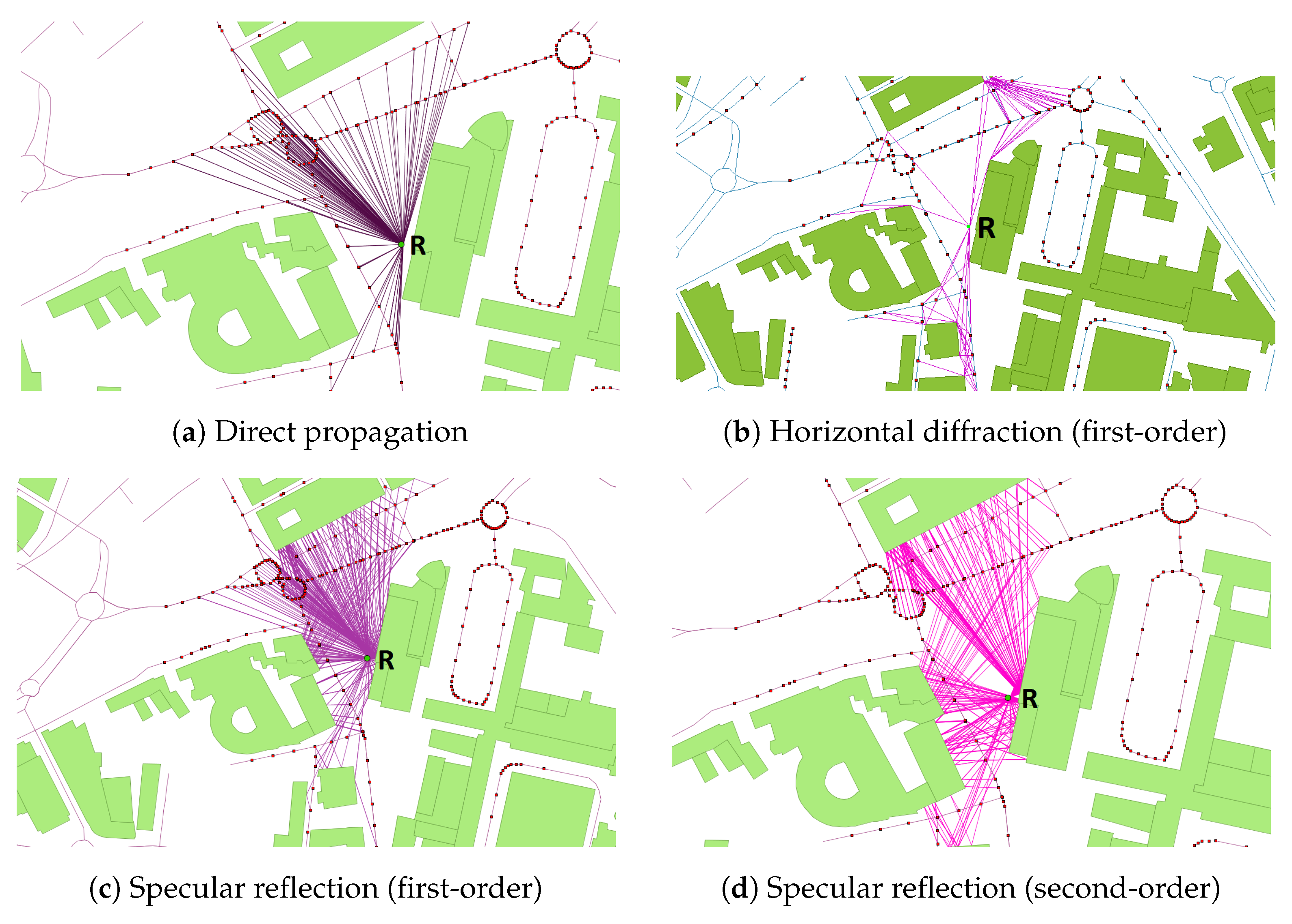
3.3. Noise Propagation
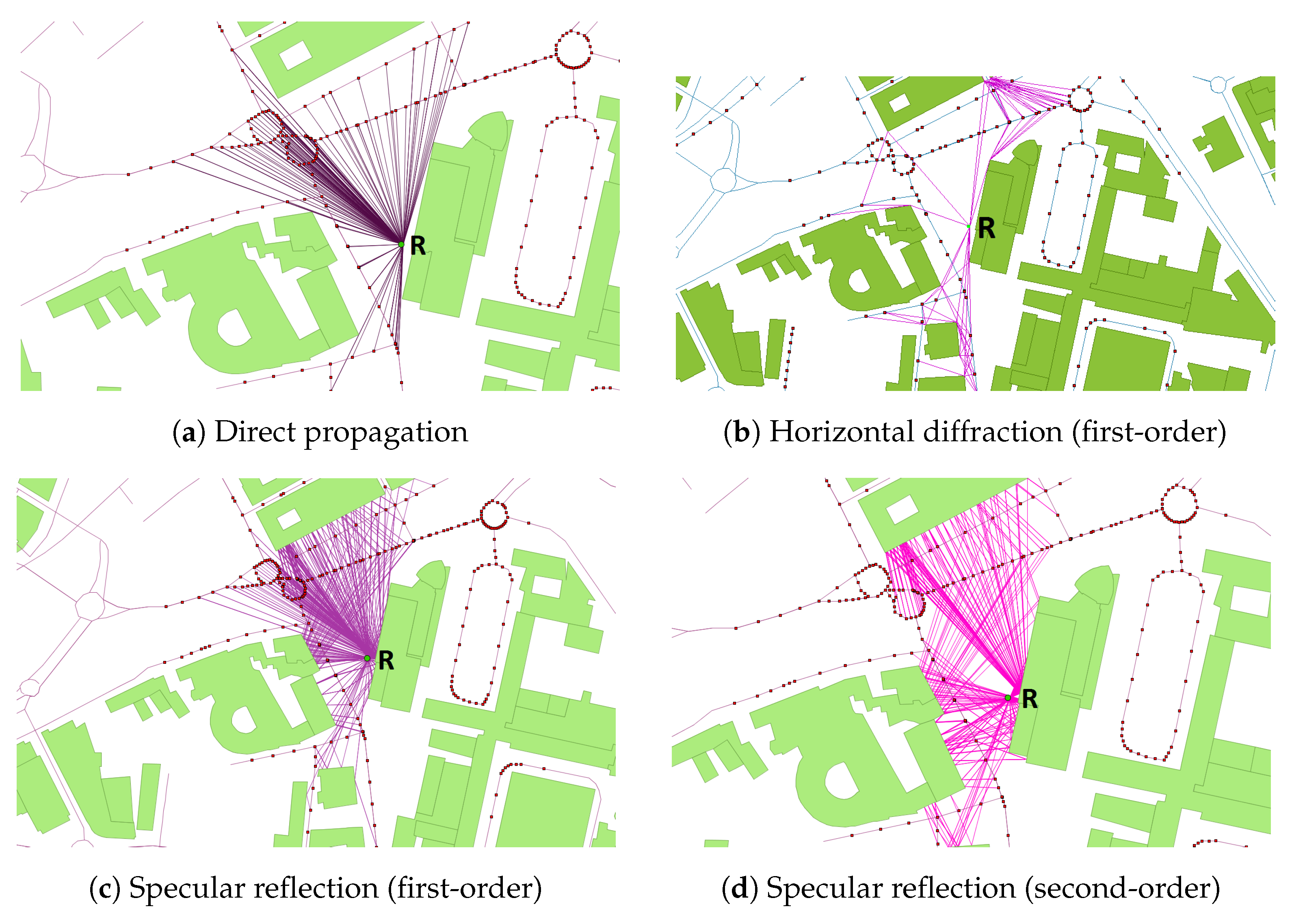
- the direct field, which corresponds to the sound waves propagating directly from the source to the receiver (Figure 2a);
- the diffracted field, related to the diffraction of the sound waves around and over the buildings (Figure 2b); and
- the reflected field, associated with the reflections on the ground and on the buildings facades along the propagation path that can also include absorption by these elements (Figure 2c,d).
3.4. Numerical Optimisation
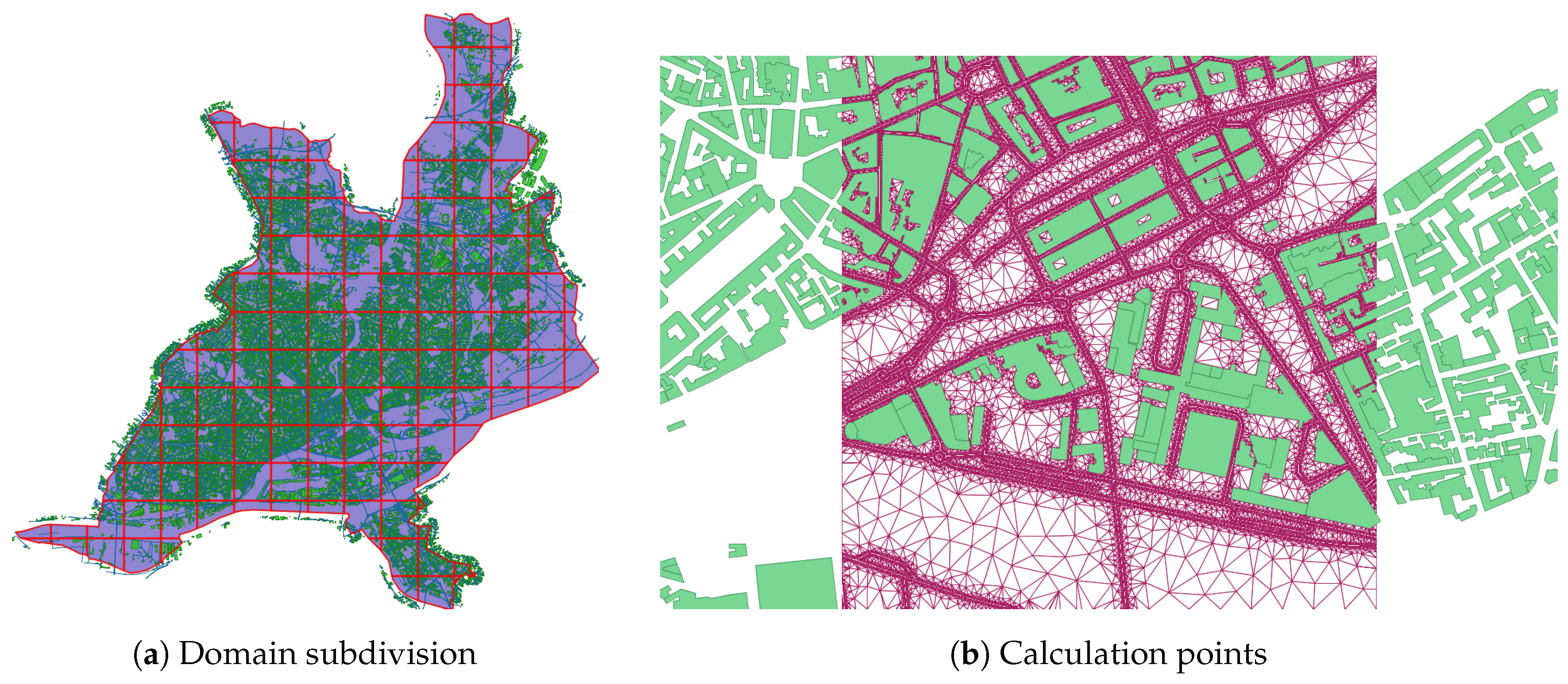
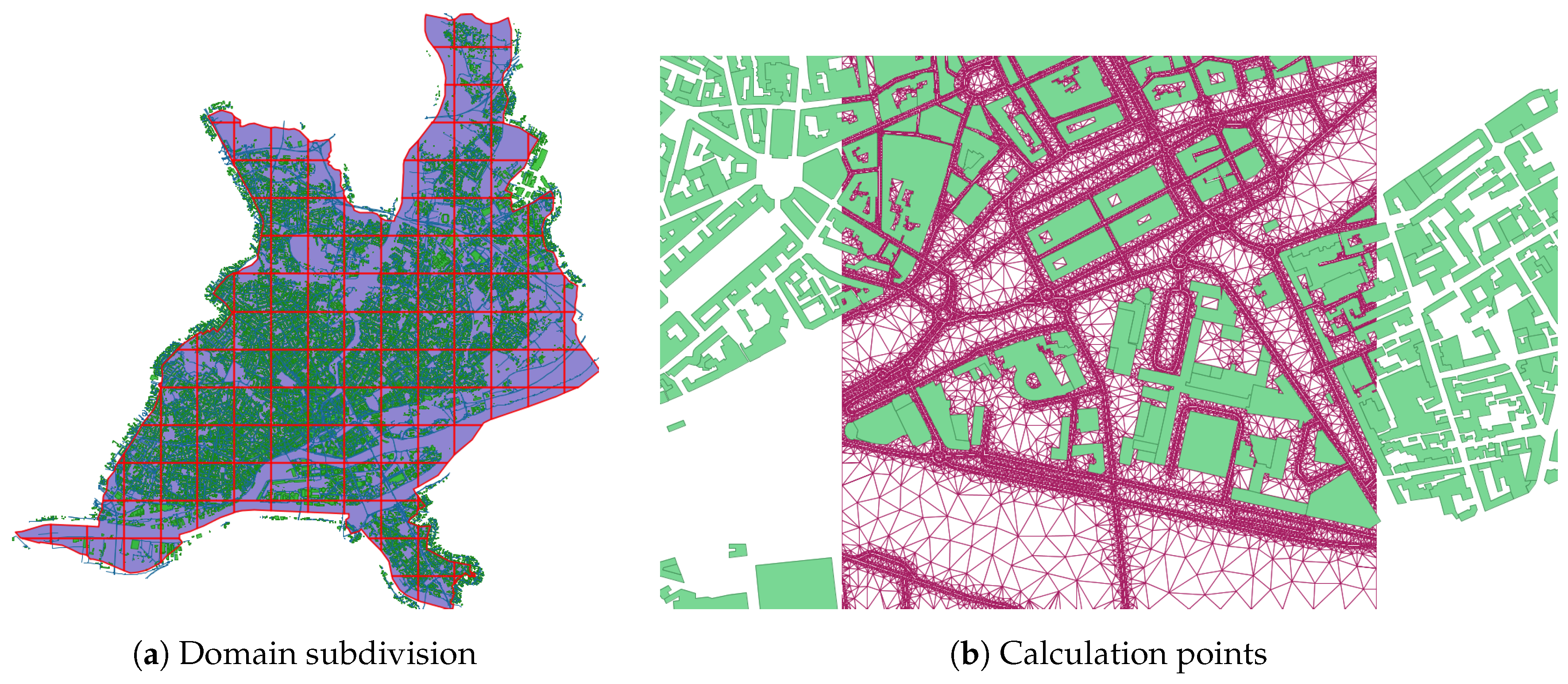
3.4.1. Domain Subdivision
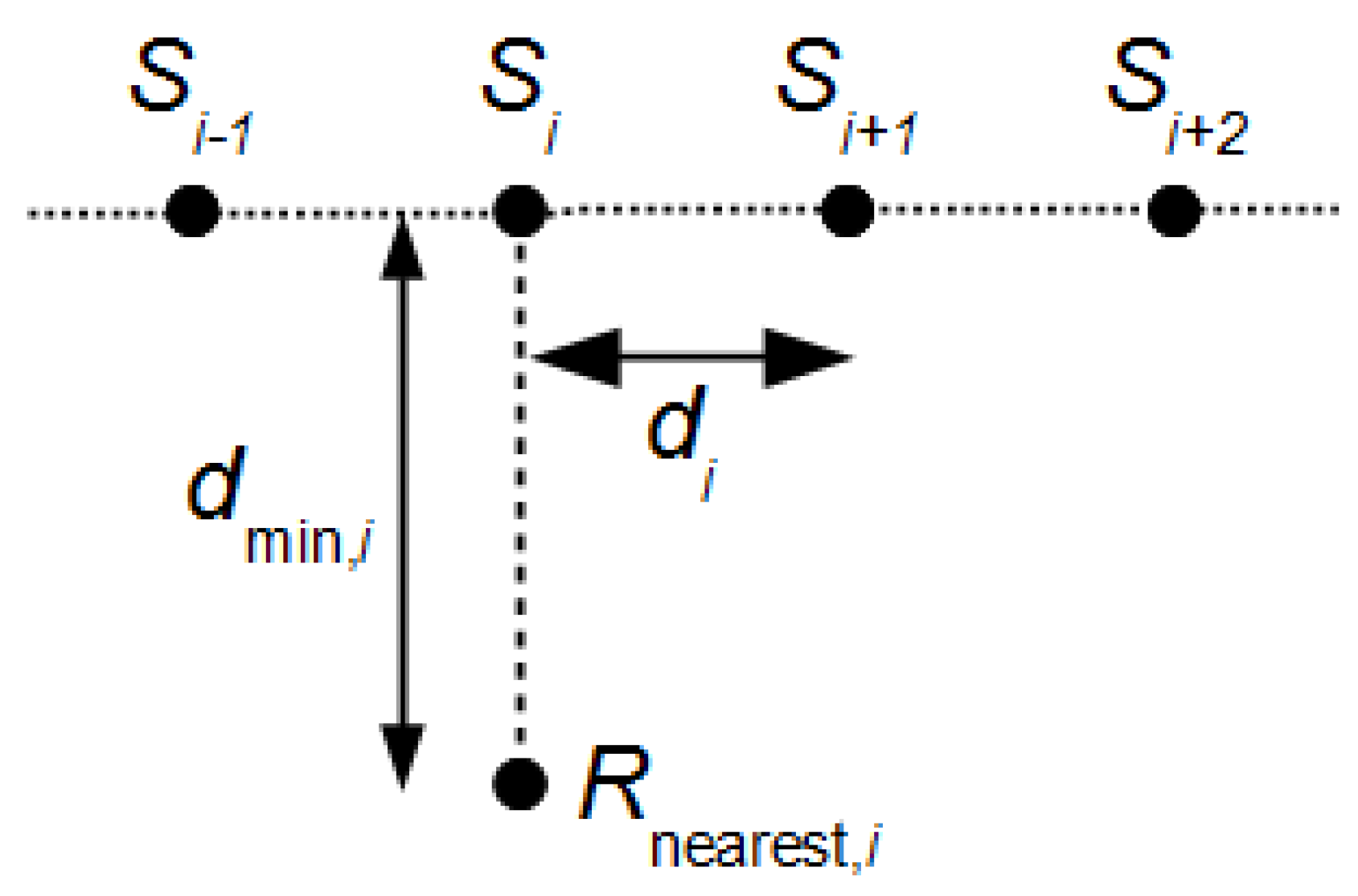
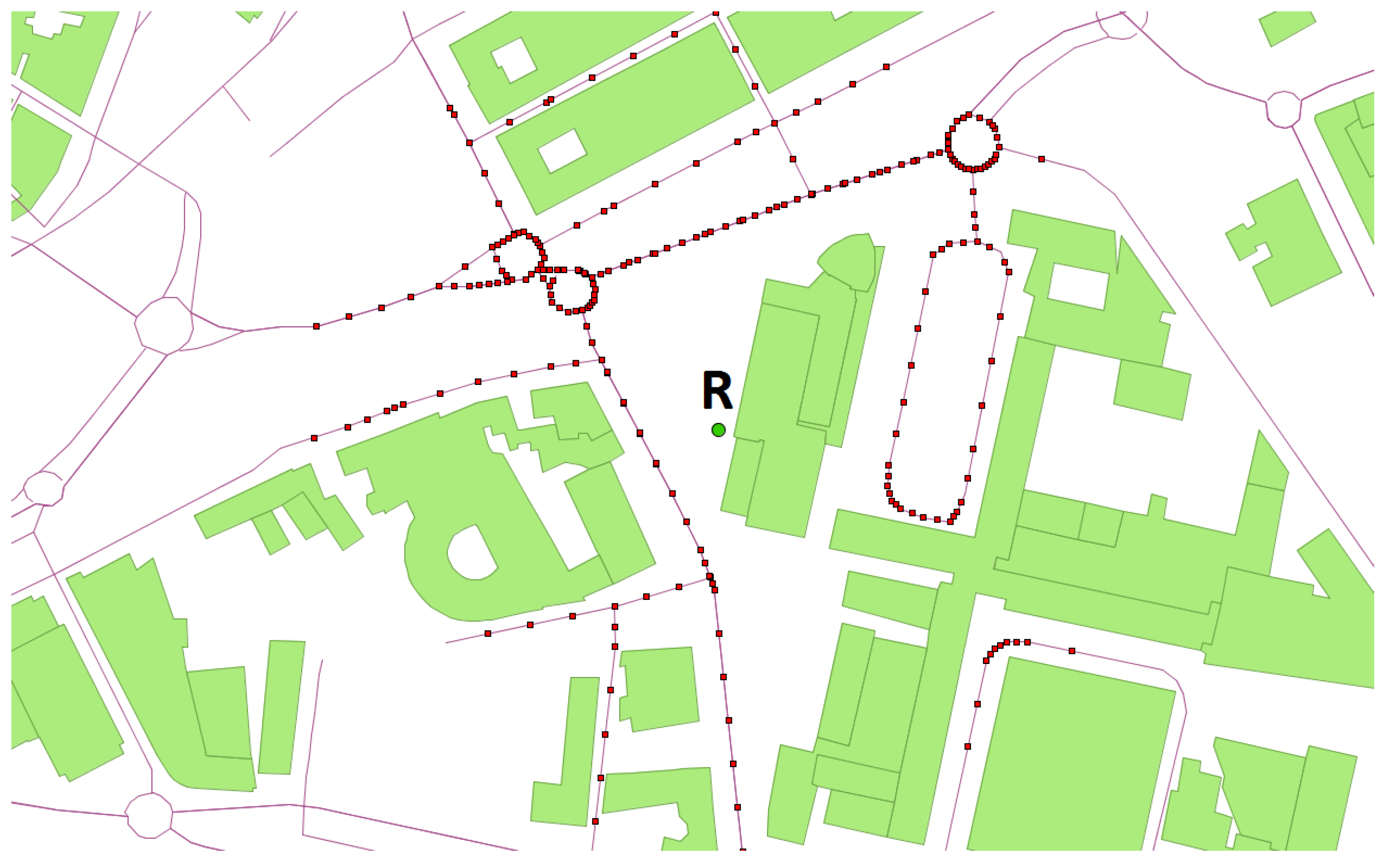
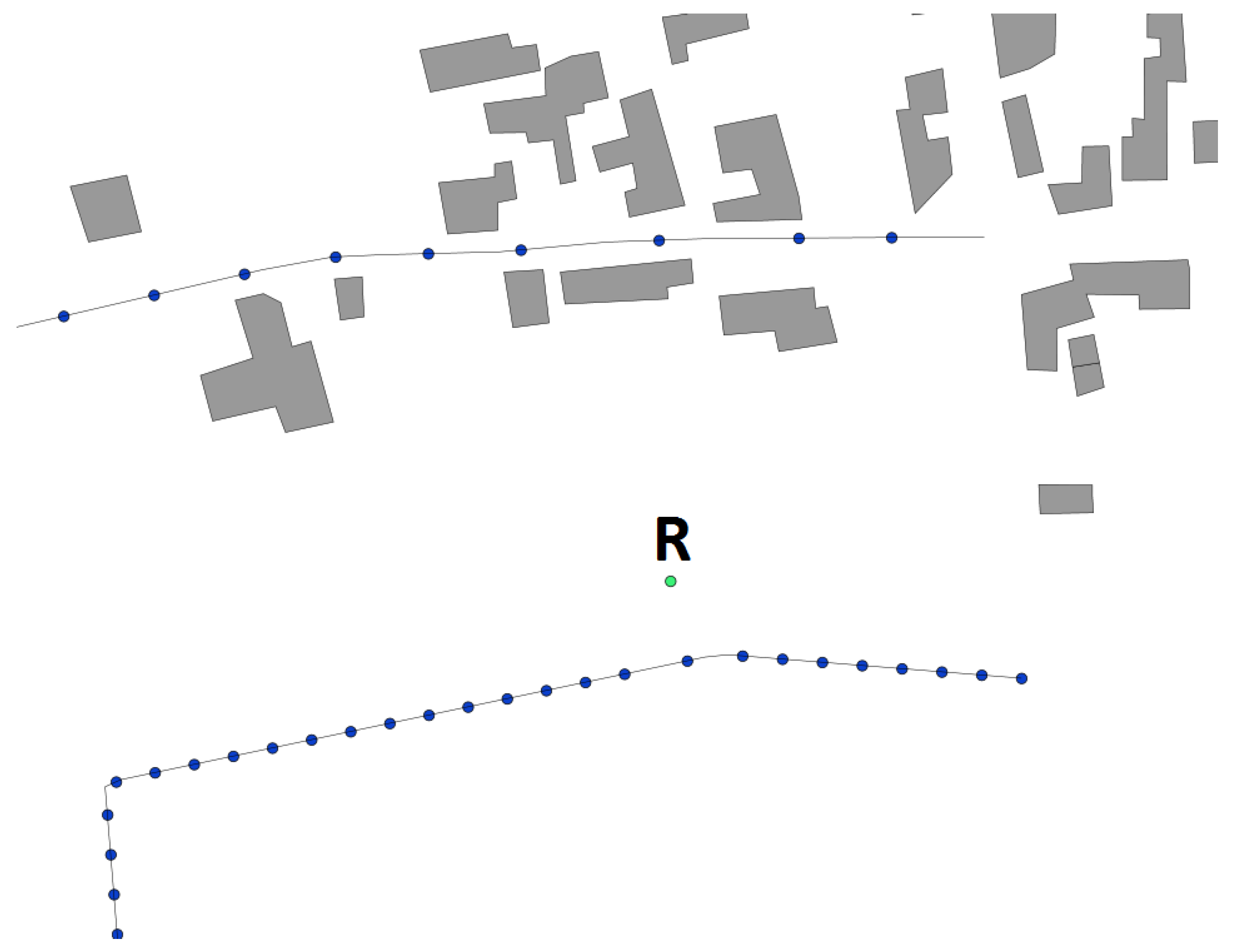
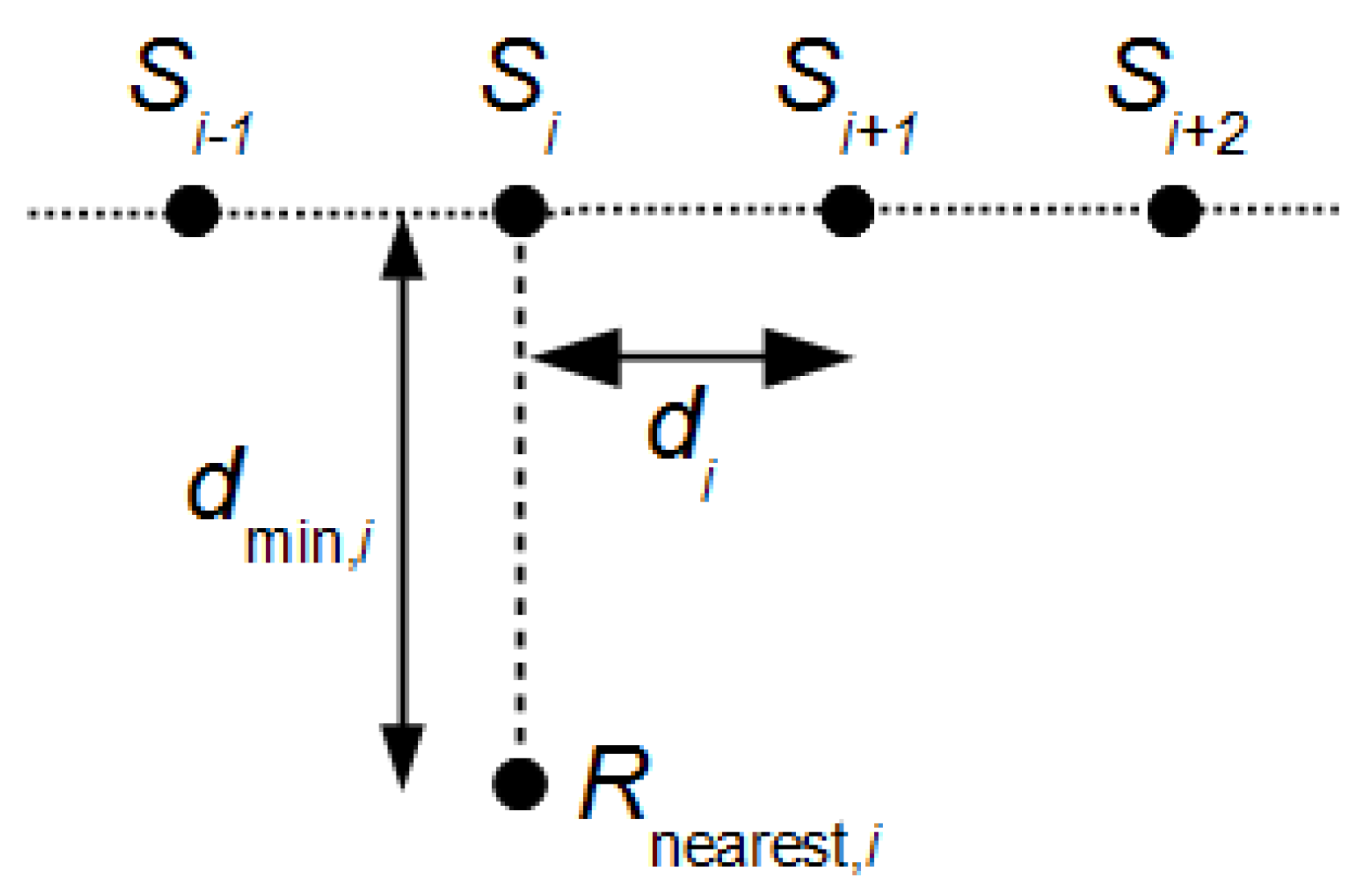
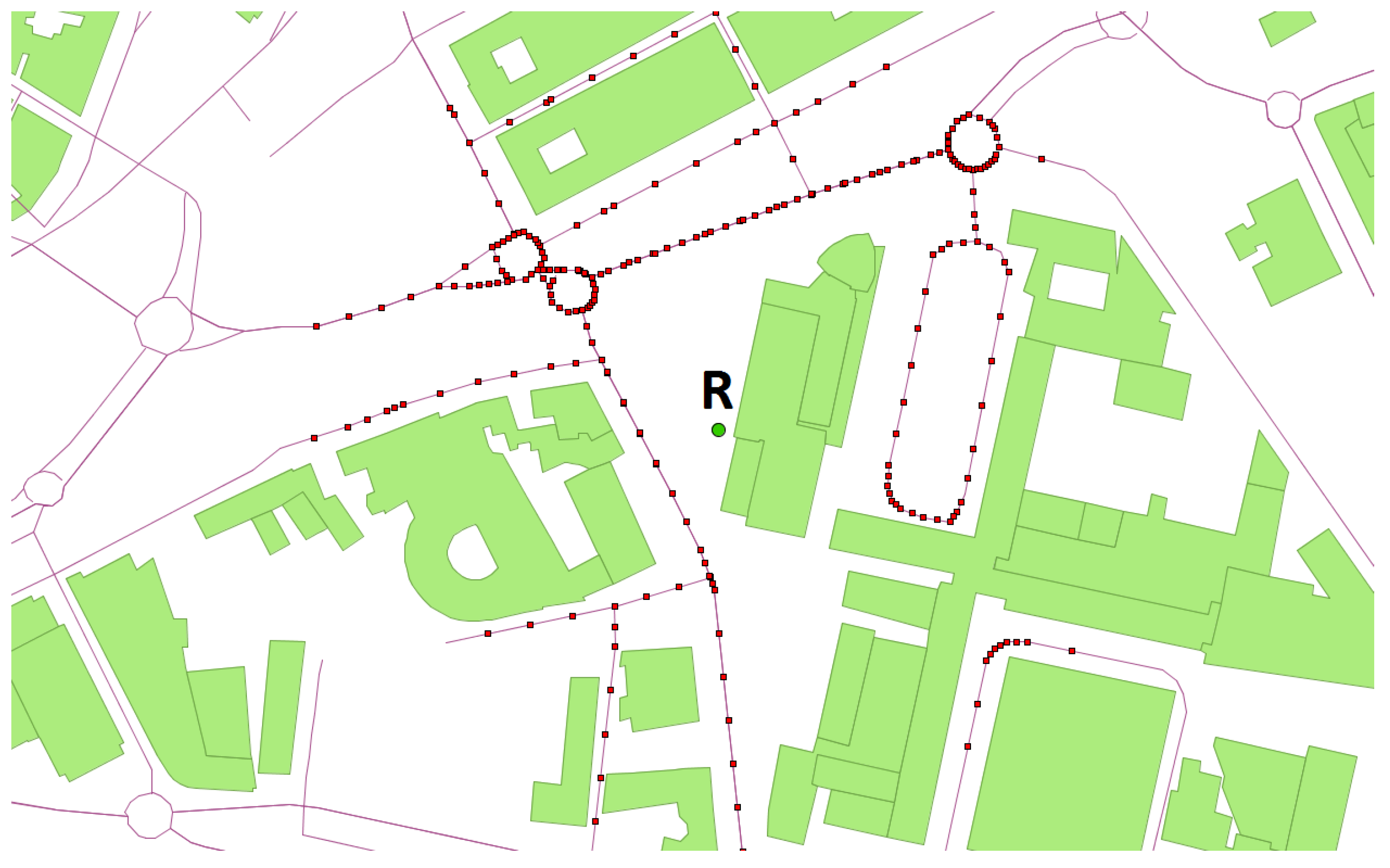
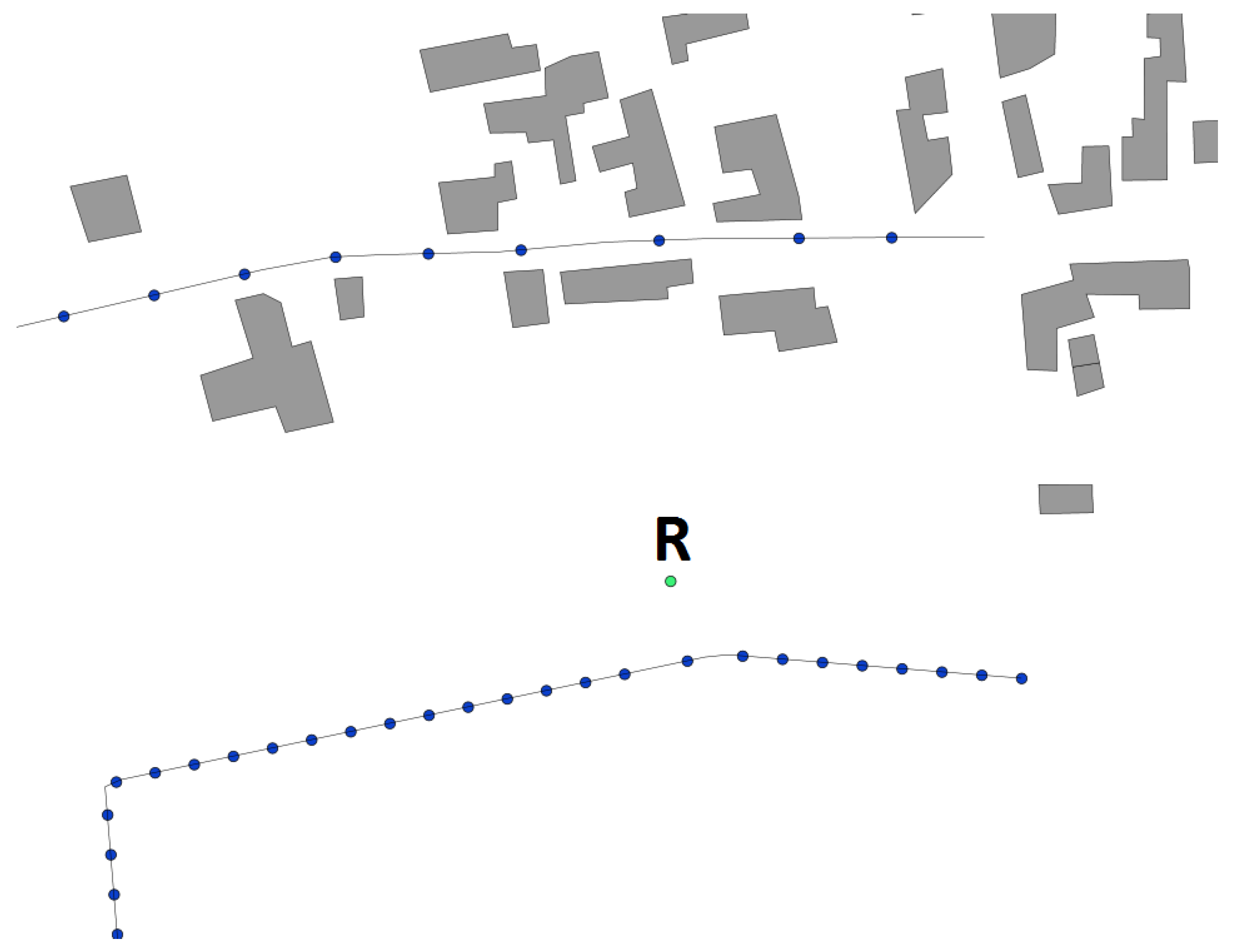
3.4.2. Point Source Generation
4. Integration within the OrbisGIS Platform
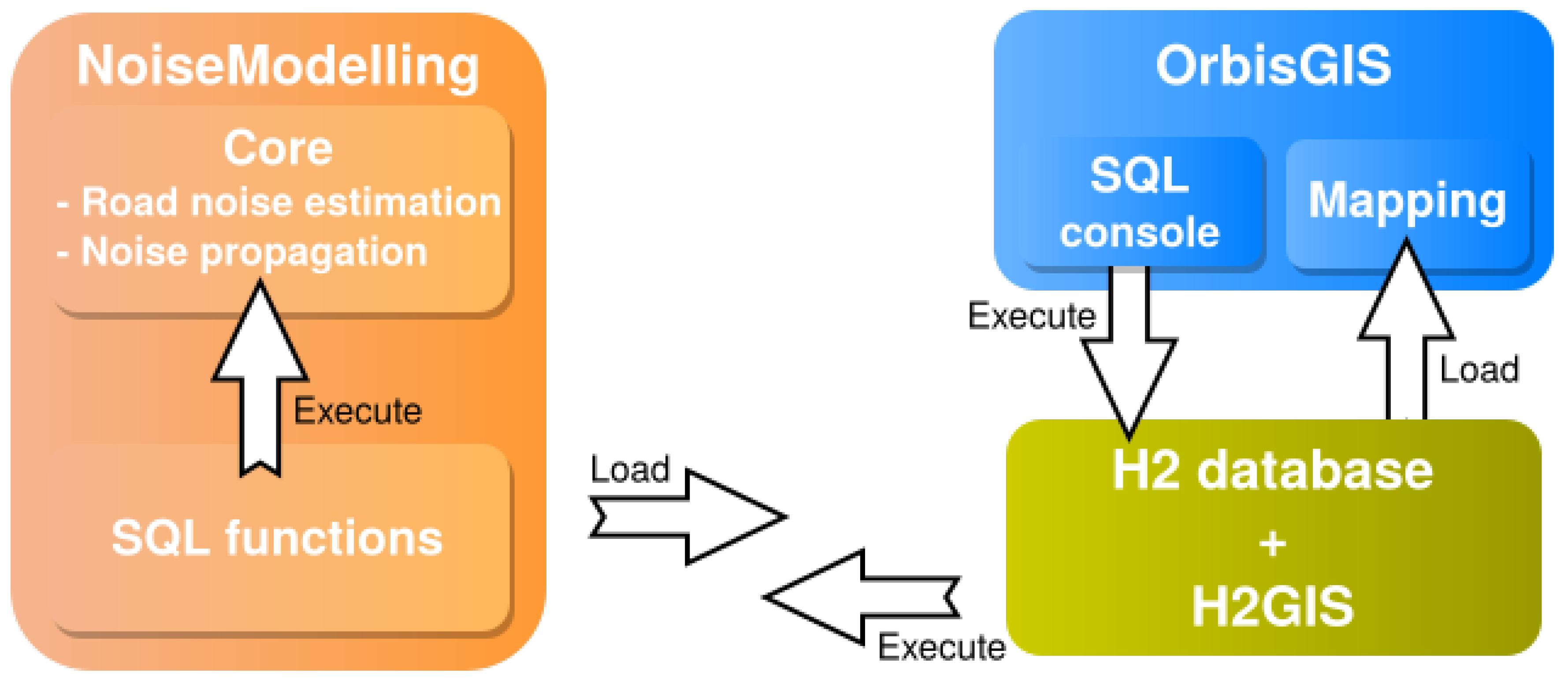
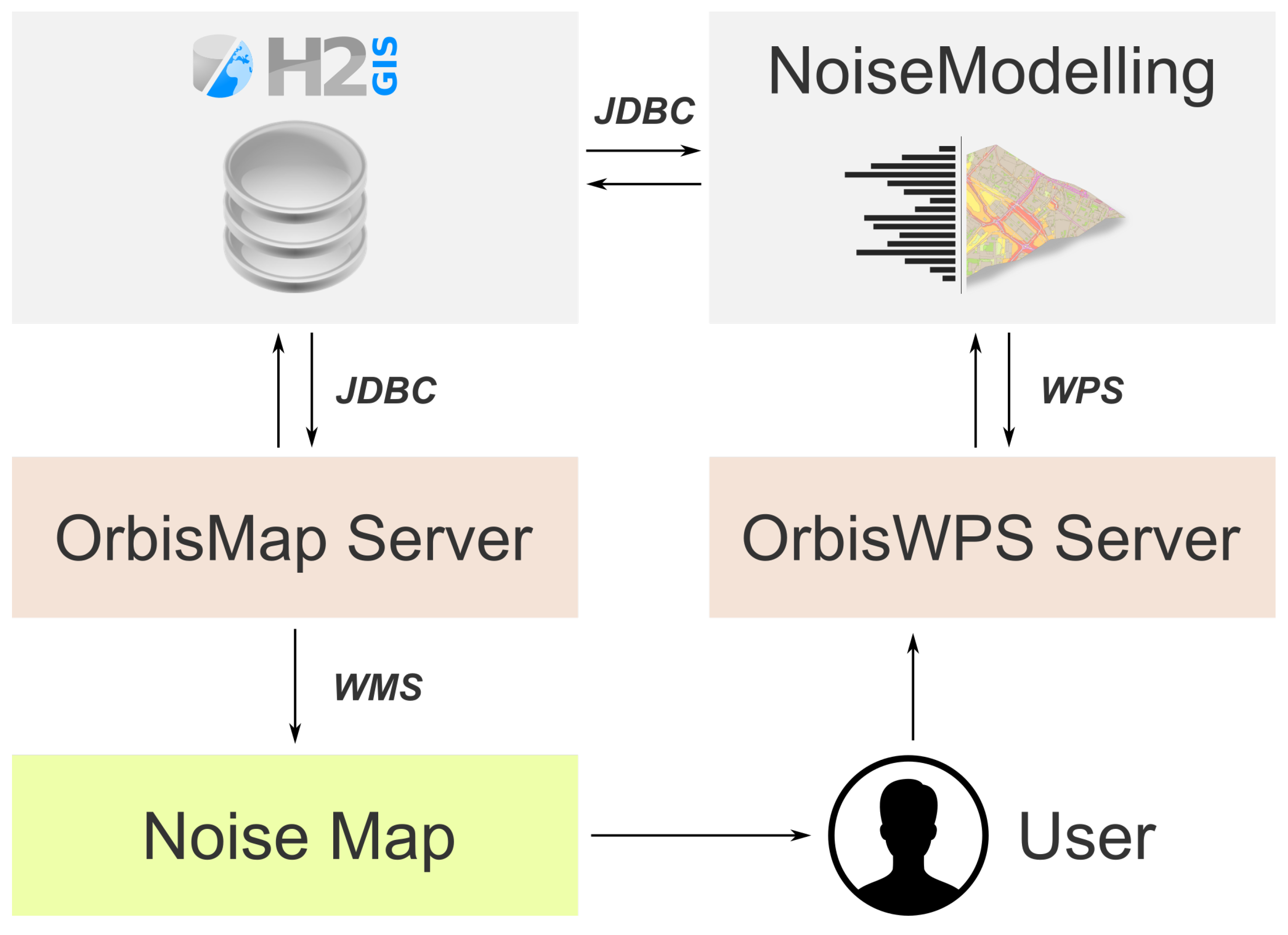
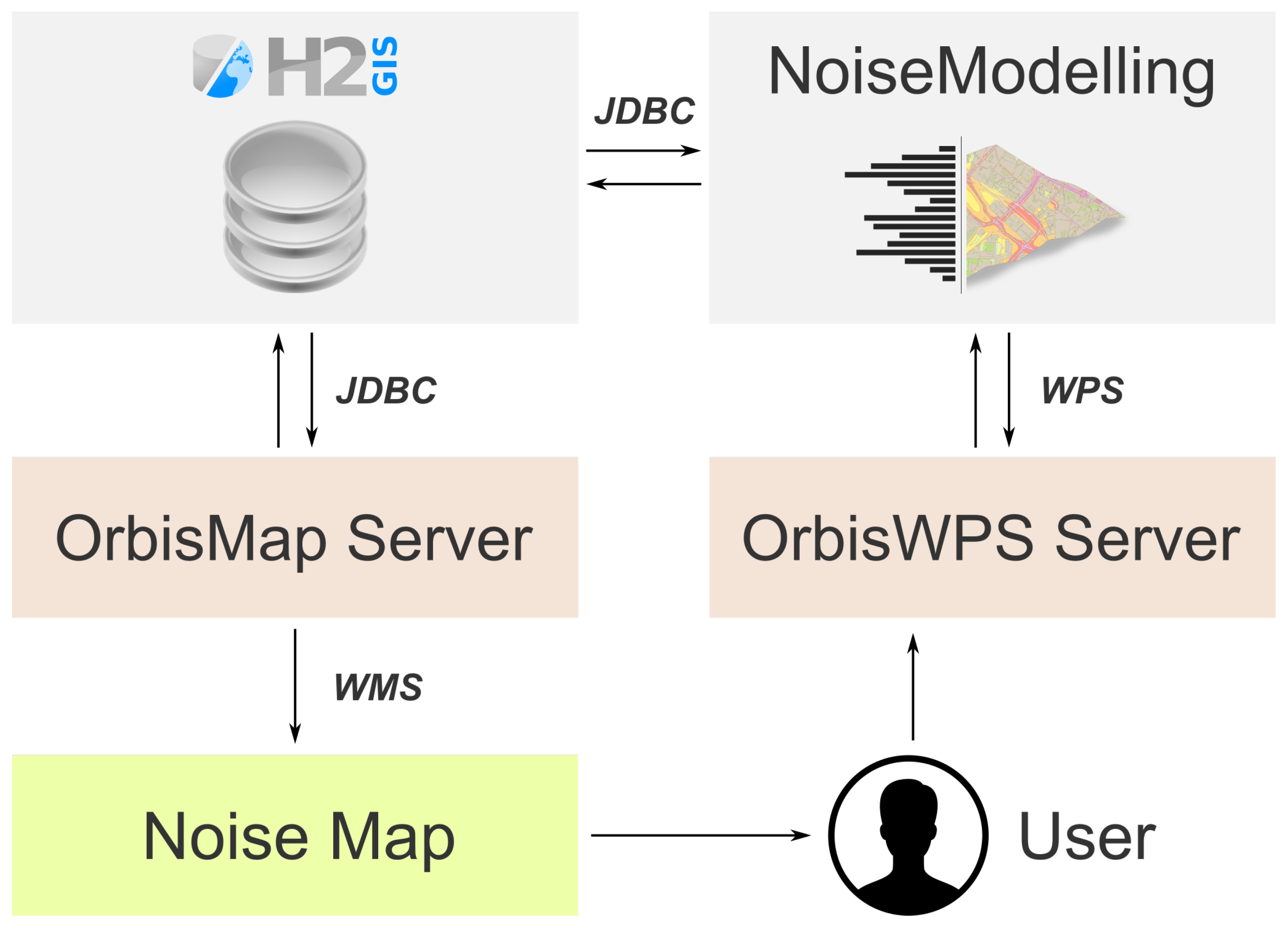
4.1. Architecture
- a set of sound sources defined by a geometry (lines or points) and an associated emission power in the form of a third octave band spectrum within the frequency range from 100 Hz until 5 kHz;
- an array of buildings as a 2D geometry (polygons), without information requirement concerning neither the buildings height nor the topography; and
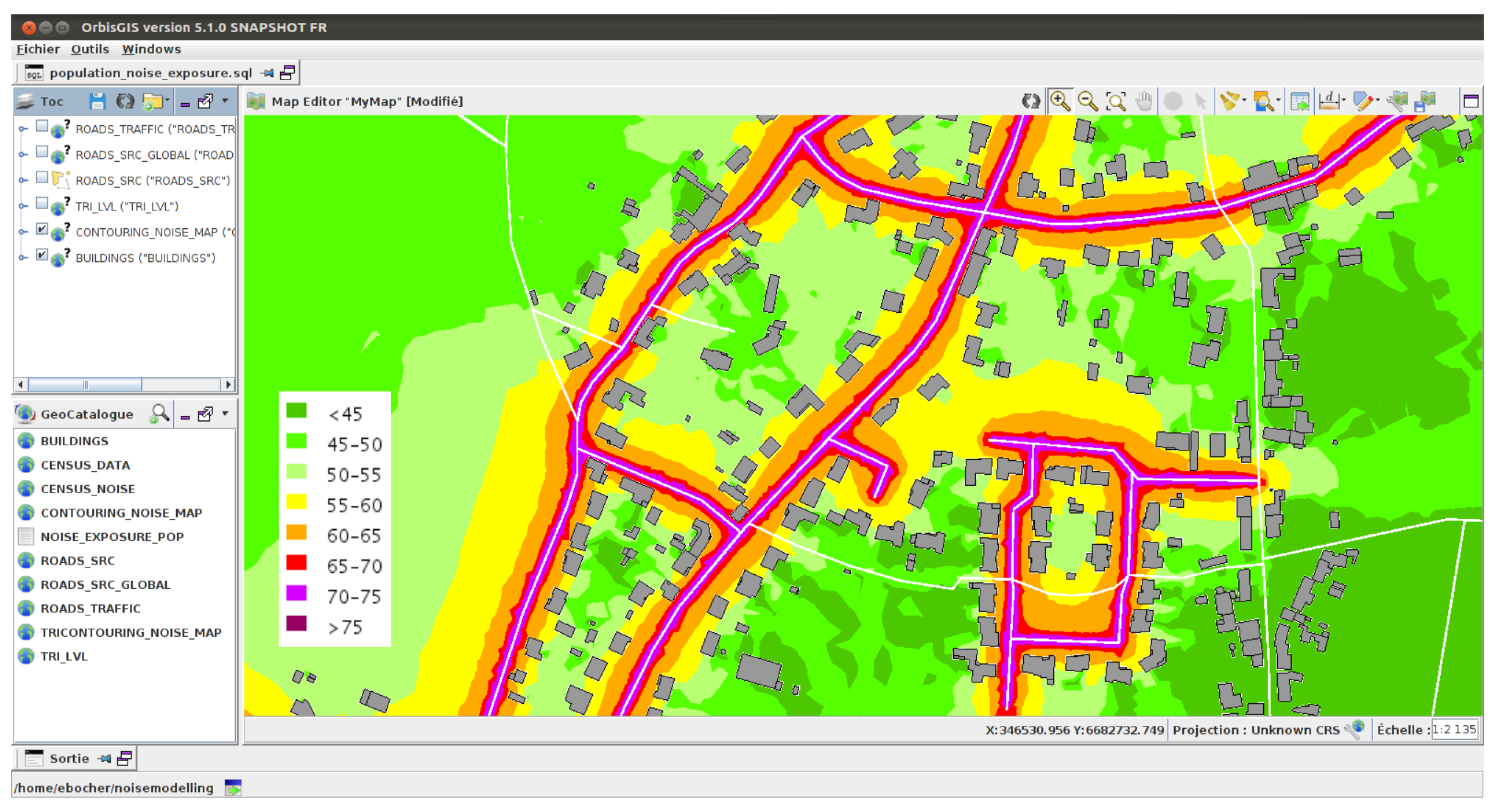
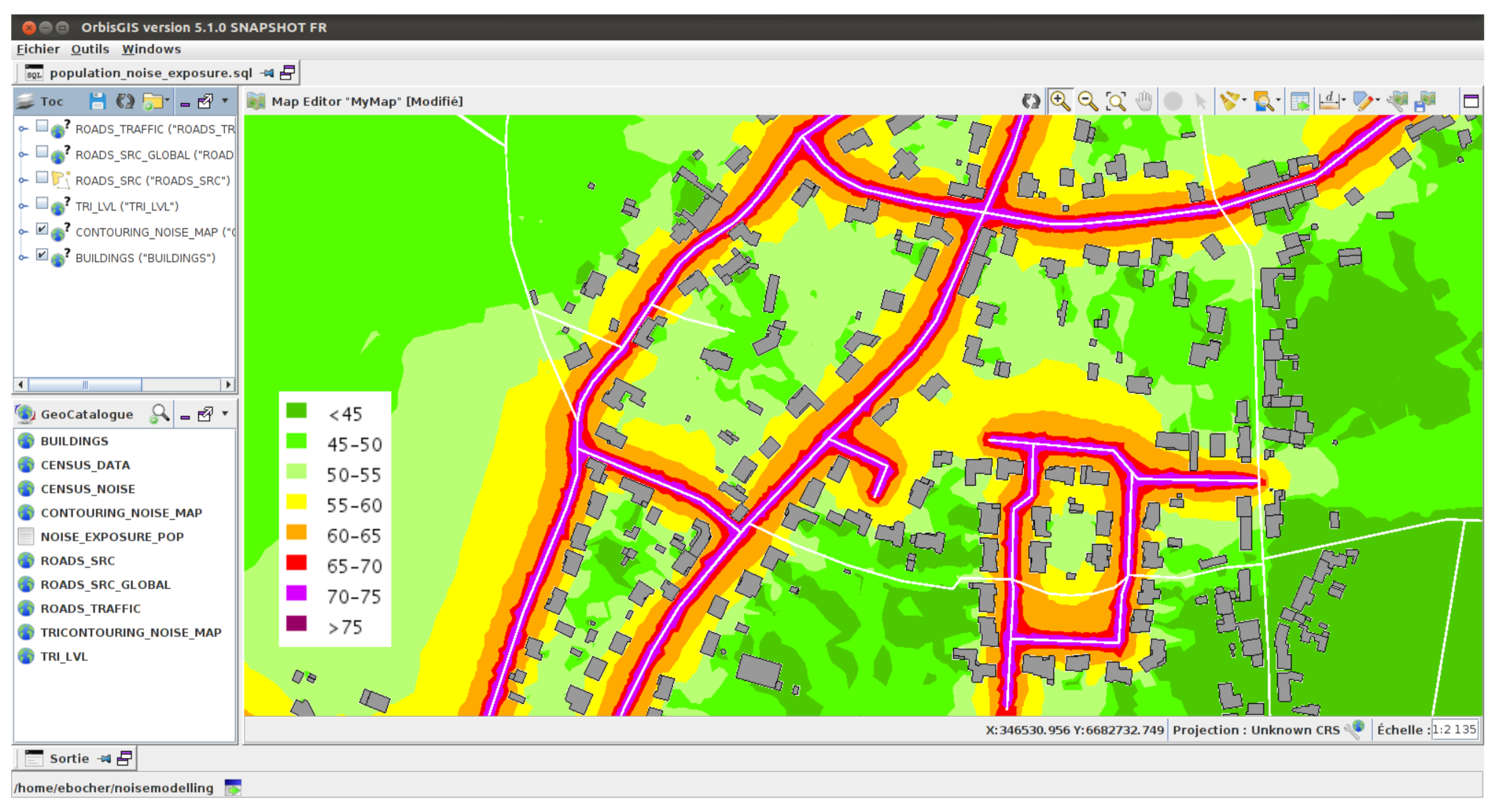
- producing a continuous noise map as iso-levels based on the colour code defined in the standard NF S31-130 [70]; and
- computing the population noise exposure by means of a spatial statistical analysis with external data (for example, IRIS data from the French National Institute of Statistics and Economic Studies (INSEE, https://www.insee.fr/en/accueil) or, at the European scale, GEOSTAT data from the European Statistical Office (Eurostat—https://ec.europa.eu/eurostat/fr/web/gisco/geodata/reference-data/population-distribution-demography/geostat)).
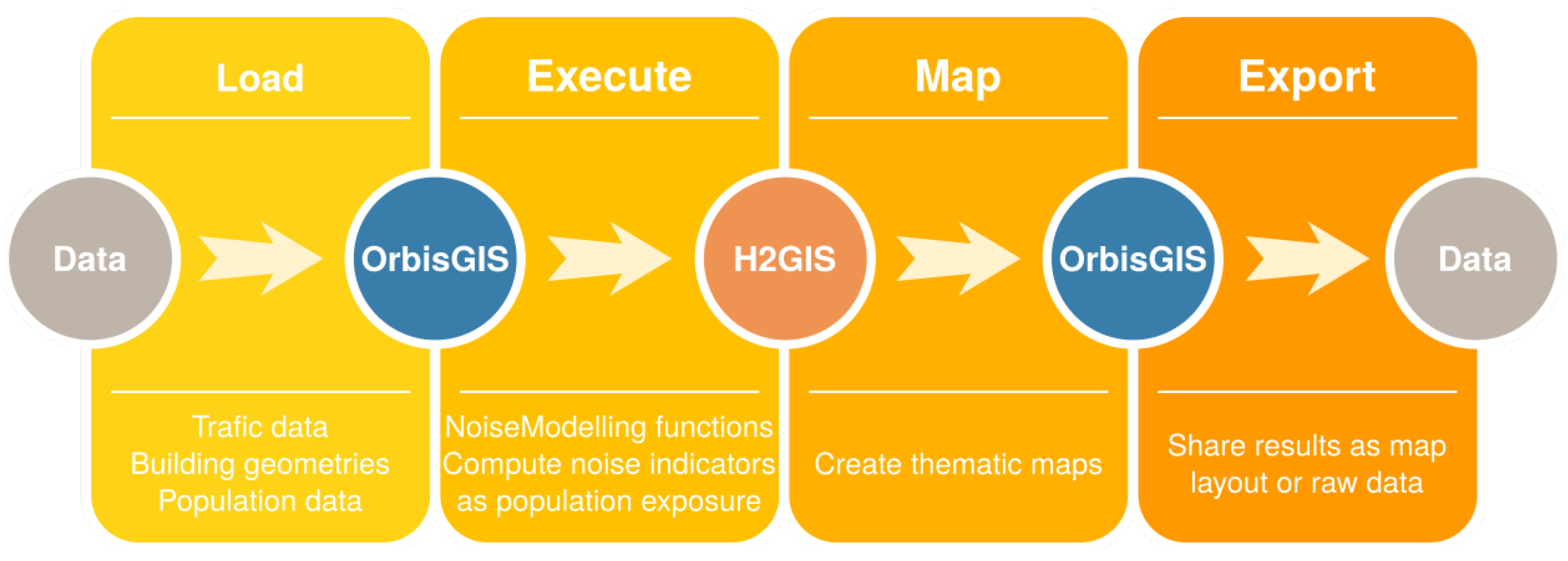
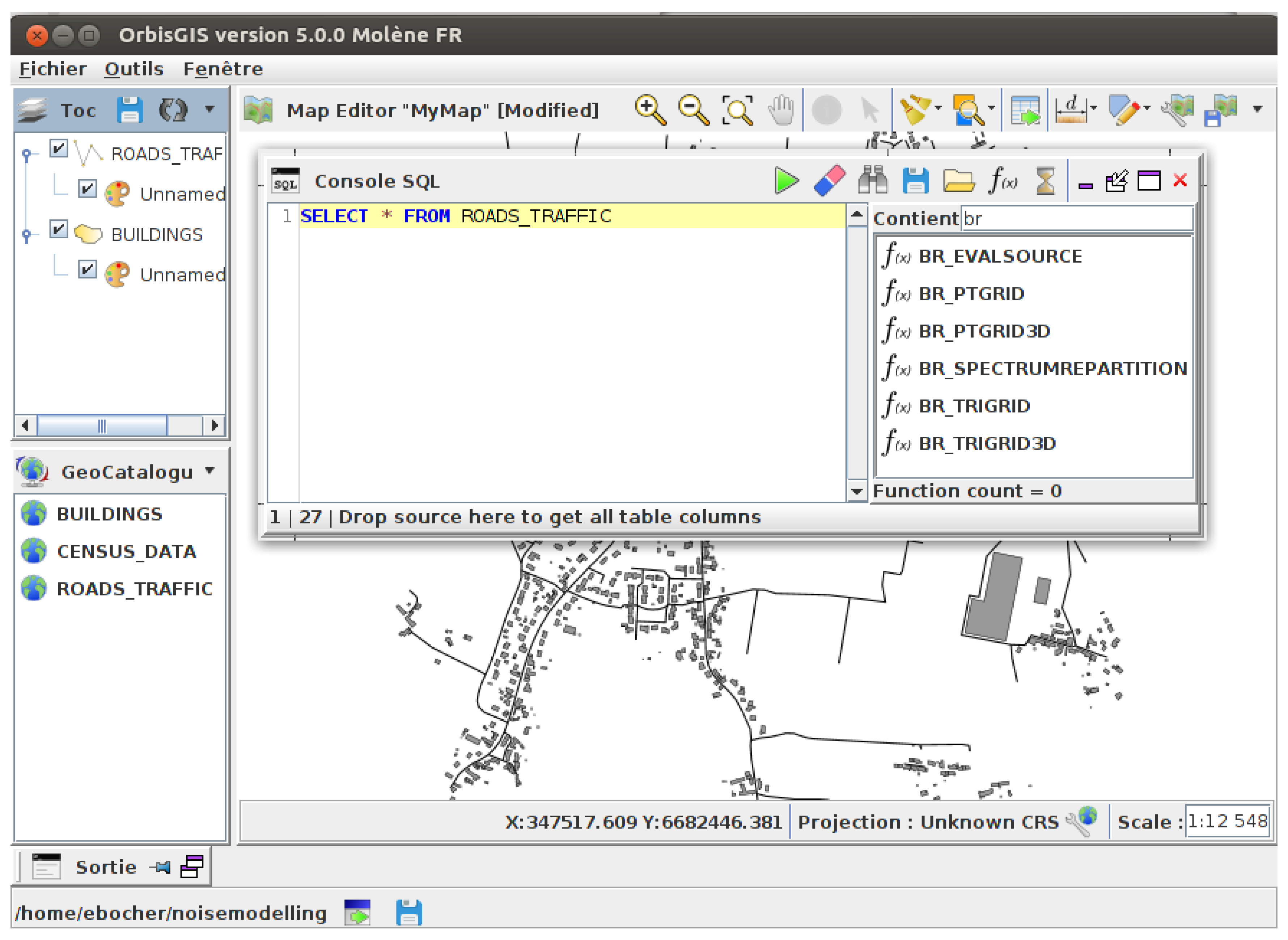
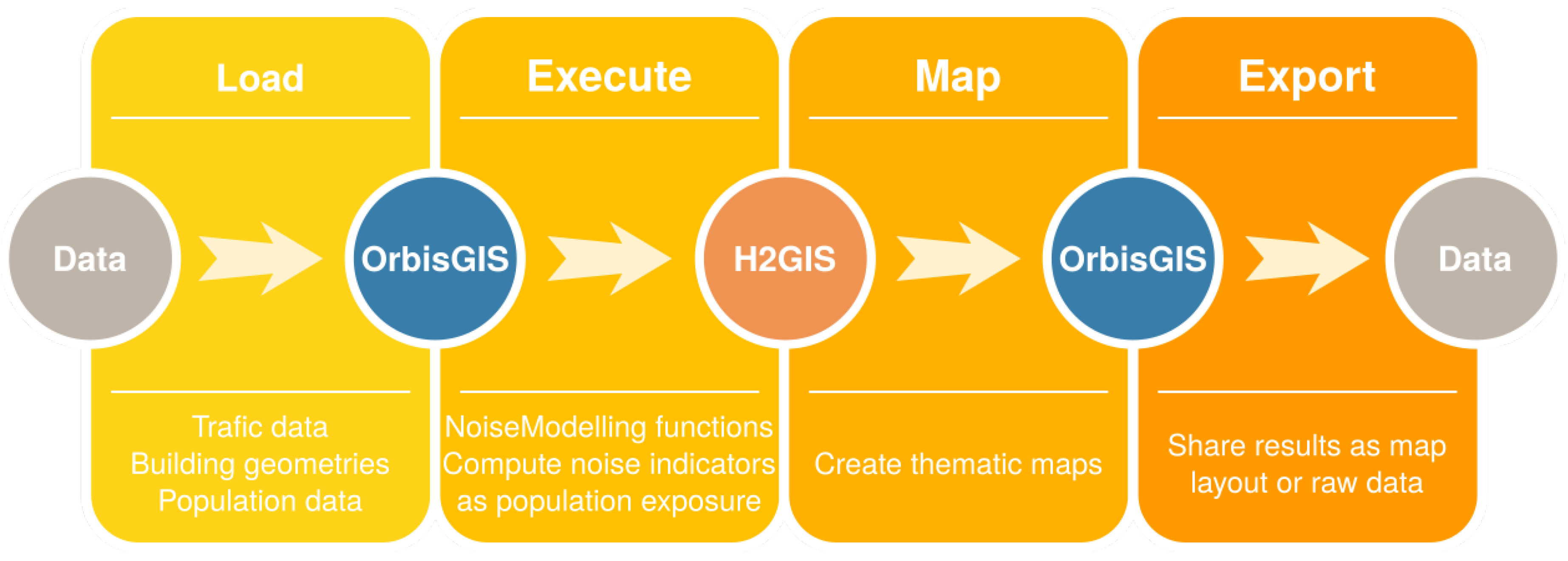
4.2. Use of NoiseModelling from the GUI
- Step 1: Compute sound sources from traffic data.
- Step 2: Create the noise map.
- Step 3: Estimate population exposure.
4.2.1. Step 1: Compute Sound Sources from Traffic Data
- a third octave band frequency among the values from 100 to 5000 Hz;
- an integer value, to set the category of the road surface (“0” for porous pavements and “1” for non-porous pavement); and
- a noise emission value in dB(A).
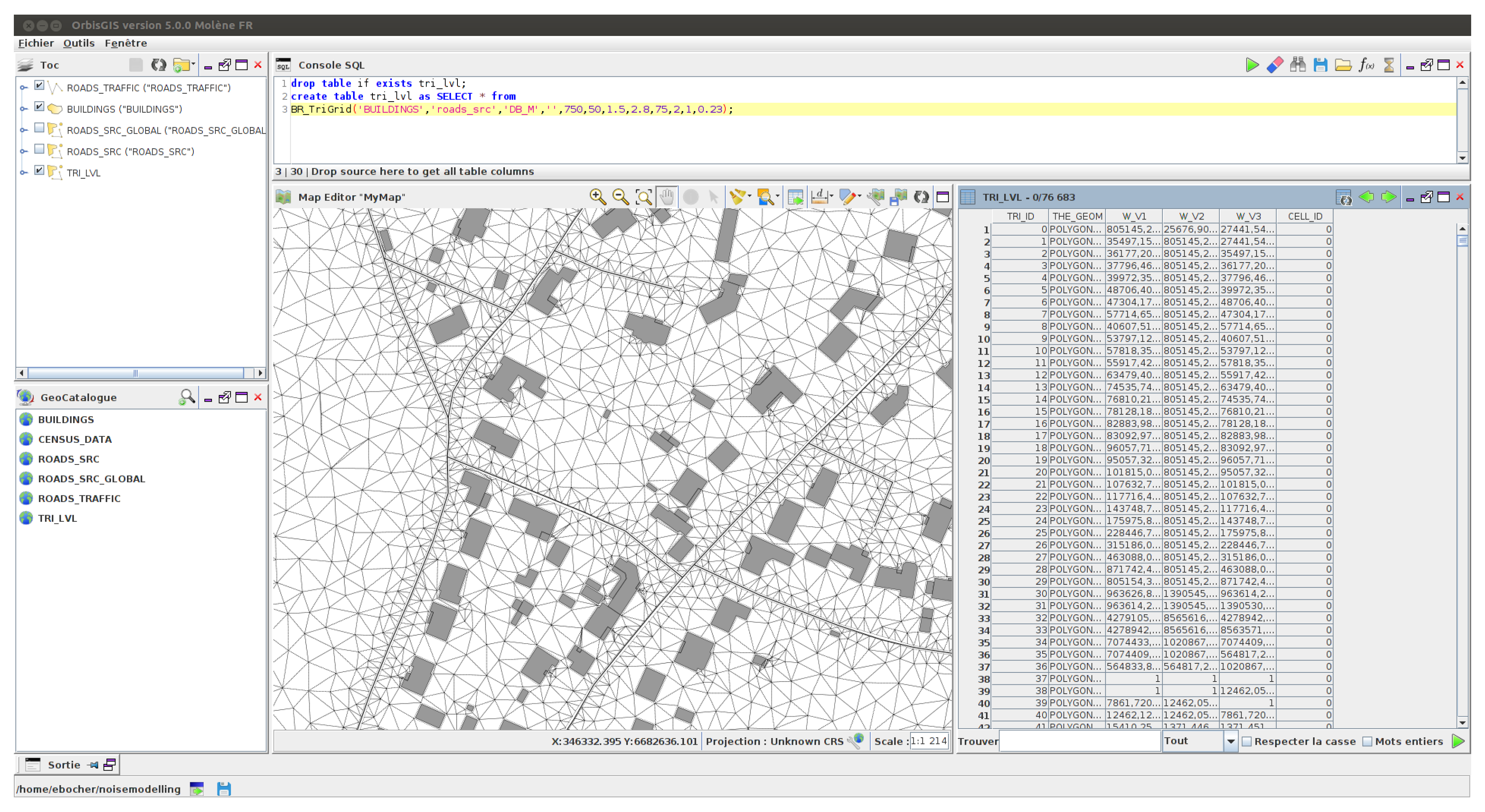
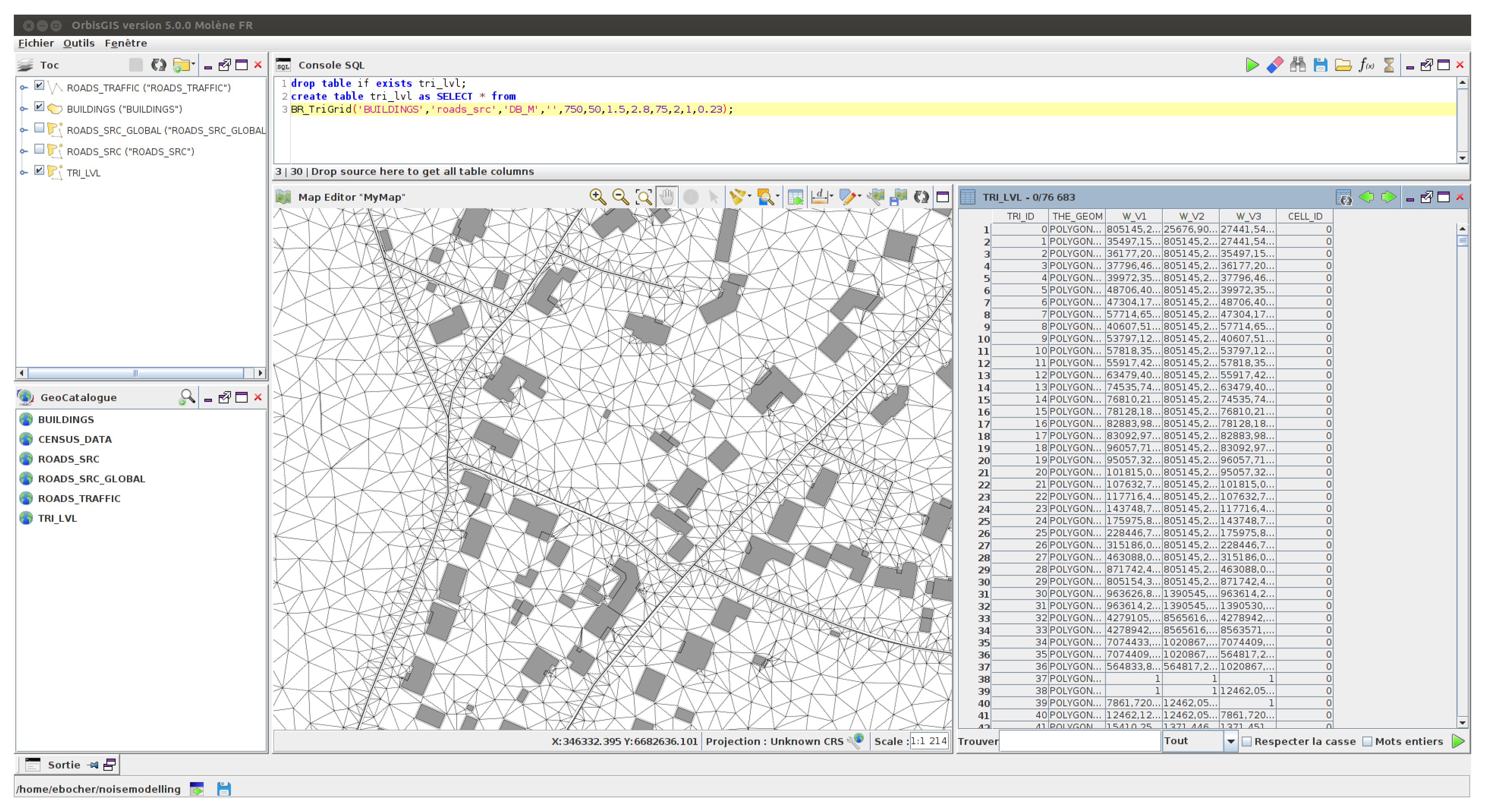
4.2.2. Step 2: Create the Noise Map
- the name of the building table, which contains a geometry column which type is POLYGON;
- the name of the table that stores the sound power level expressed in dB(A) for a geometry type POINT or LINESTRING;
- the name of the emission level column;
- the maximum propagation distance (, in meter) from the receivers that enables to ignore the sources farther than this distance for each receiver (see Section 3.4.2);
- the maximum wall seeking distance (, in meter), which permits to overlook walls farther than this direct propagation distance between each source and receiver, thus neglecting reflections and diffractions on these walls;
- the road width (in meter), which gives the distance from which the receivers start being created (should be superior than 1 m);
- the receivers densification value (, in meter), which creates additional receivers at the corresponding value from the sources (0 to disable);
- the maximum area of a triangle (, in squared meters), which sets the maximum surface for the noise map triangular mesh (a smaller area means more receivers;
- the sound reflection order (, a positive integer), which corresponds to the maximum number of wall reflections between each source and receiver;
- the sound diffraction order (, a positive integer), which defines the maximum number of horizontal diffractions between each source and receiver; and
- a wall absorption value (, a real value between 0 and 1).
- TRI_ID, unique identifier of a mesh (i.e., a triangle);
- W_V1, sound energy for the receiver at the first vertex of the mesh;
- W_V2, sound energy for the receiver at the second vertex of the mesh;
- W_V3, sound energy for the receiver at the third vertex of the mesh; and
- CELL_ID, unique identifier for a cell if the computational domain is subdivided (default is 0; see Section 3.4).
4.2.3. Step 3: Estimate Population Exposure
5. Application to the Study of Urban Mobility Plans
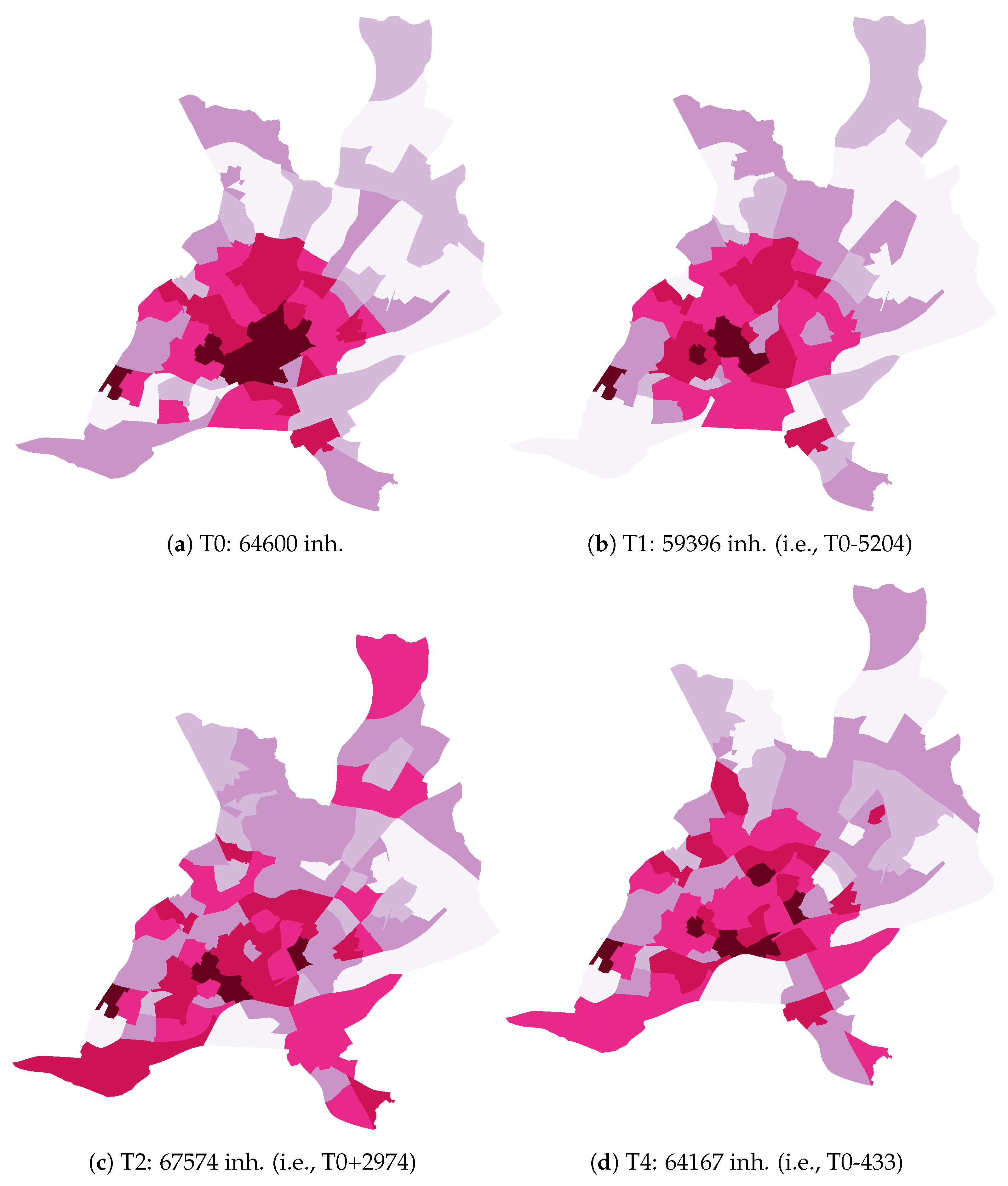
5.1. Urban Mobility Plans Scenarios
5.2. Input Data
5.2.1. Traffic Data
5.2.2. Other Input Data
- Geographical data
- The geographical data (topography, buildings, roads) are issued from the BD TOPO® database provided by the National Institute of Geographic and Forestry Information (IGN, website: http://www.ign.fr/). Note that there is no noise barrier in the study area.
- Road pavement
- Due to the lack of information concerning the nature of road pavements, some simplifications in comparison to the standard method [62] are considered in terms of type and age of the road pavement. Because porous surfaces are mostly used for road segments with vehicle speed over 70 or even 90 km/h, only non-porous pavements are considered, which represent the majority of the roads in built-up area. In addition, the age of pavement is fixed at 10 years, which is, here again, a relevant hypothesis.
- Population
- Statistical population units are given from INSEE databases with Commune boundaries (INSEE, website: https://www.insee.fr/).
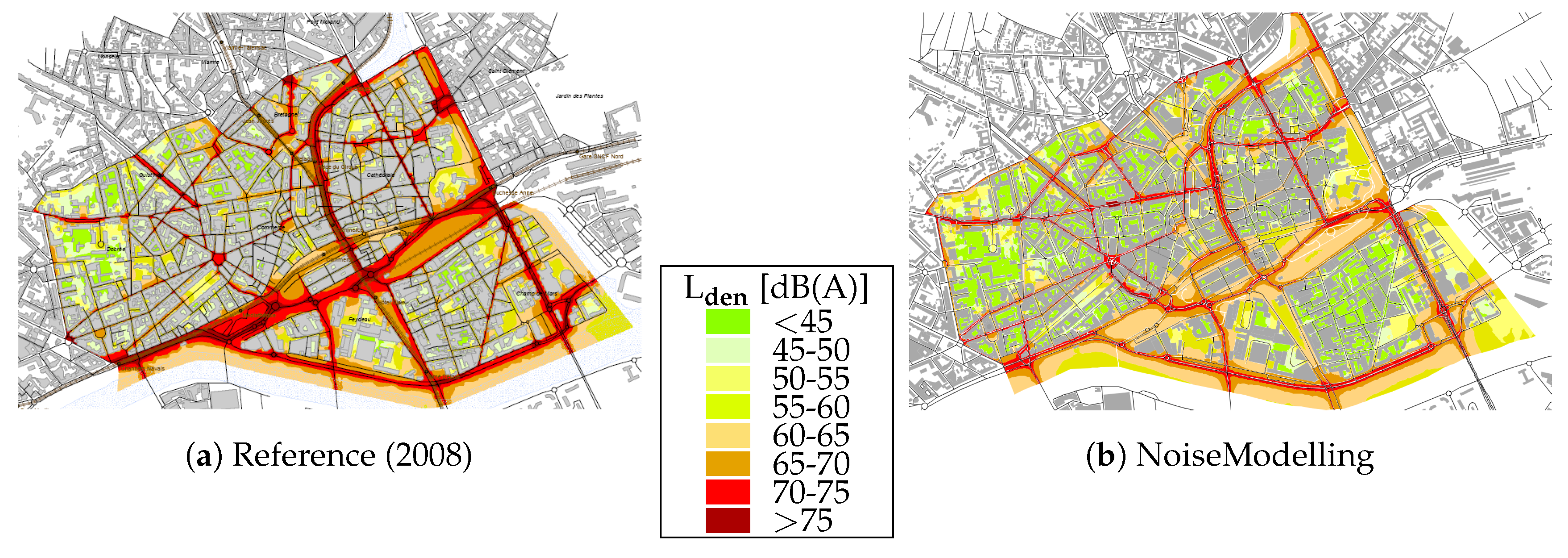
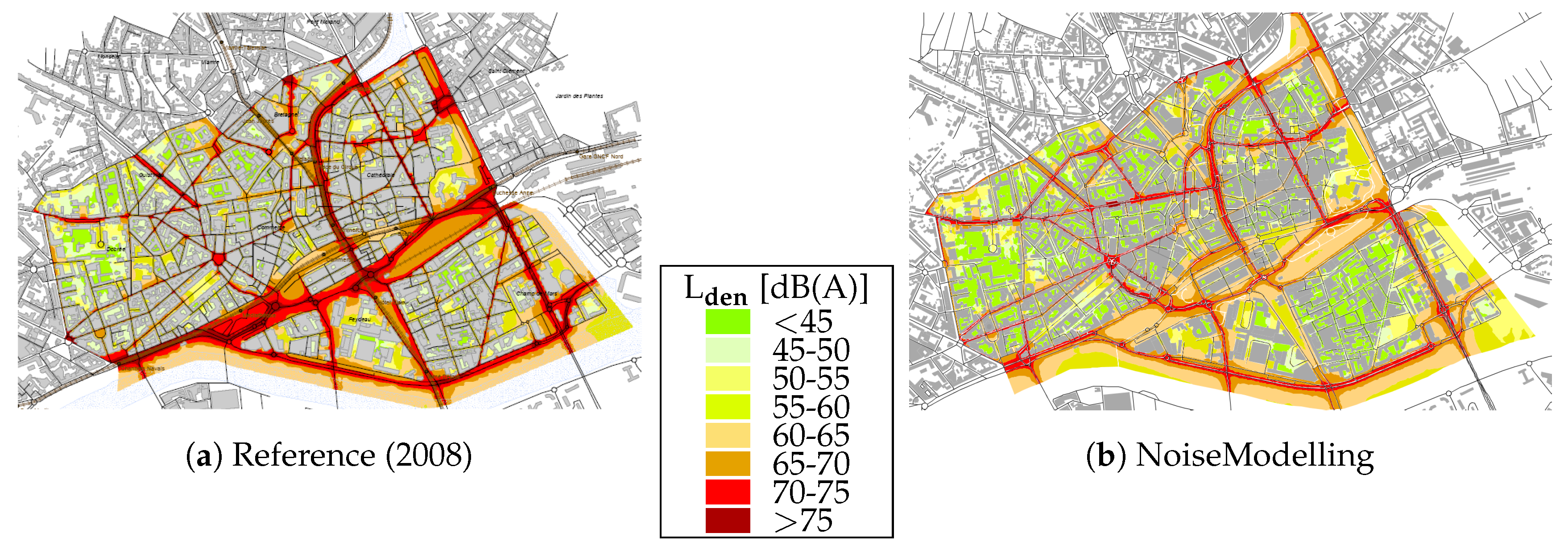
5.3. Initial Verification
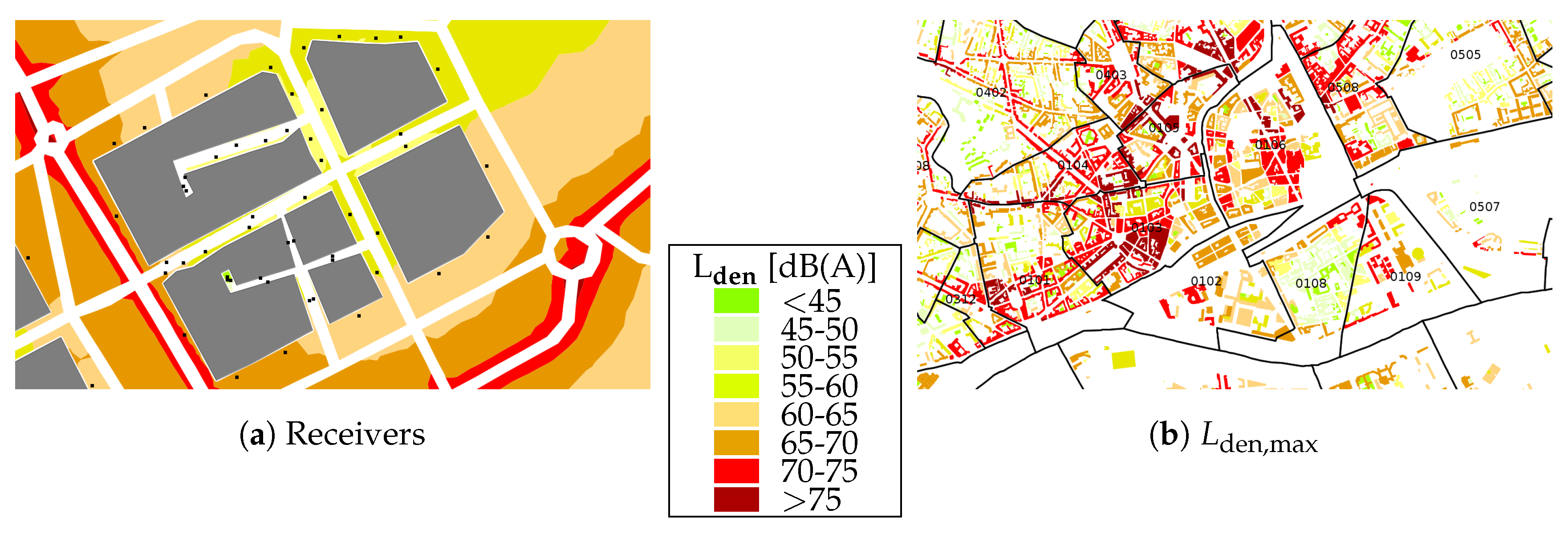
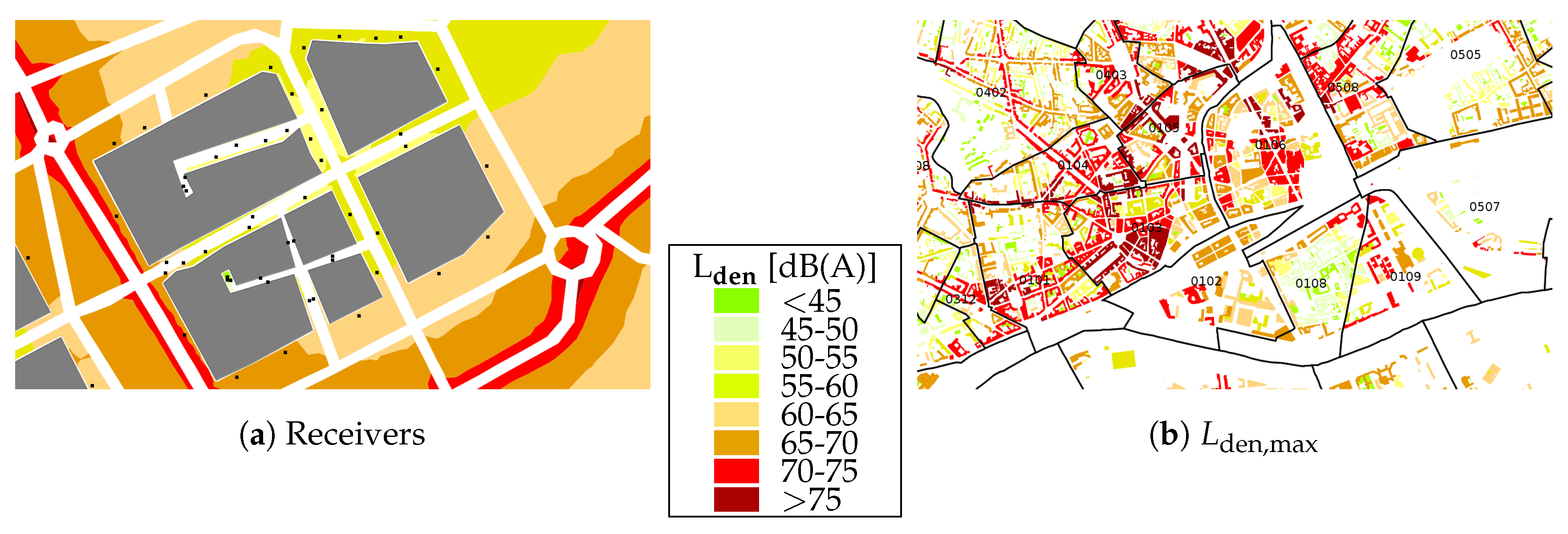
5.4. Statistical Analysis of Scenarios in Terms of Population Noise Exposure
- the sound levels were first computed at 1 m from the façades of buildings, as illustrated in Figure 13a;
- the values were then filtered in order to retain the maximal values per building unit (i.e., ) as presented in Figure 13b; and
- the noise levels for each building were then combined with statistical population units into OrbisGIS. The number of residents in the buildings was estimated firstly by identifying the residential buildings, secondly by collecting the population data, and thirdly by assigning the population data to the habitable surface of buildings [74]. The habitable surface corresponded to the product of the floor area multiplied by 0.85 (to take into account the common areas), with the number of storeys. The last parameter was deduced from the building height, assuming a theoretical value of 3 m for one storey.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. SQL Scripts
References
- United Nations. Our Urbanizing World; Population Facts No. 2014/3; Department of Economic and Social Affairs, Population Division: New York, NY, USA, 2014. [Google Scholar]
- Śliwińska-Kowalska, M.; Zaborowski, K.; Śliwińska-Kowalska, M.; Zaborowski, K. WHO Environmental Noise Guidelines for the European Region: A Systematic Review on Environmental Noise and Permanent Hearing Loss and Tinnitus. Int. J. Environ. Res. Public Health 2017, 14, 1139. [Google Scholar] [CrossRef] [PubMed]
- Van Kempen, E.; Casas, M.; Pershagen, G.; Foraster, M. WHO Environmental Noise Guidelines for the European Region: A Systematic Review on Environmental Noise and Cardiovascular and Metabolic Effects: A Summary. Int. J. Environ. Res. Public Health 2018, 15, 379. [Google Scholar] [CrossRef] [PubMed]
- Klatte, M.; Bergström, K.; Lachmann, T. Does noise affect learning? A short review on noise effects on cognitive performance in children. Front. Psychol. 2013, 4, 578. [Google Scholar] [CrossRef] [PubMed]
- Basner, M.; McGuire, S. WHO Environmental Noise Guidelines for the European Region: A Systematic Review on Environmental Noise and Effects on Sleep. Int. J. Environ. Res. Public Health 2018, 15, 519. [Google Scholar] [CrossRef] [PubMed]
- Guski, R.; Schreckenberg, D.; Schuemer, R.; Guski, R.; Schreckenberg, D.; Schuemer, R. WHO Environmental Noise Guidelines for the European Region: A Systematic Review on Environmental Noise and Annoyance. Int. J. Environ. Res. Public Health 2017, 14, 1539. [Google Scholar] [CrossRef] [PubMed]
- Fritschi, L.; Brown, A.L.; Kim, R.; Schwela, D.; Kephalopoulos, S. Burden of Disease from Environmental Noise: Quantification of Healthy Life Years Lost in Europe; Technical Report; WHO Regional Office for Europe: København, Denmark, 2011. [Google Scholar]
- Foraster, M.; Eze, I.C.; Vienneau, D.; Schaffner, E.; Jeong, A.; Héritier, H.; Rudzik, F.; Thiesse, L.; Pieren, R.; Brink, M.; et al. Long-term exposure to transportation noise and its association with adiposity markers and development of obesity. Environ. Int. 2018, 121, 879–889. [Google Scholar] [CrossRef] [PubMed]
- Brink, M.; Schäffer, B.; Vienneau, D.; Foraster, M.; Pieren, R.; Eze, I.C.; Cajochen, C.; Probst-Hensch, N.; Röösli, M.; Wunderli, J.M. A survey on exposure-response relationships for road, rail, and aircraft noise annoyance: Differences between continuous and intermittent noise. Environ. Int. 2019, 125, 277–290. [Google Scholar] [CrossRef] [PubMed]
- Ascari, E.; Licitra, G.; Teti, L.; Cerchiai, M. Low frequency noise impact from road traffic according to different noise prediction methods. Sci. Total Environ. 2015, 505, 658–669. [Google Scholar] [CrossRef] [PubMed]
- Onchang, R.; Hawker, D. Community Noise Exposure and Annoyance, Activity Interference, and Academic Achievement Among University Students. Noise Health 2018, 20, 69–76. [Google Scholar] [PubMed]
- Alayrac, M.; Marquis-Favre, C.; Viollon, S.; Morel, J.; Le Nost, G. Annoyance from industrial noise: Indicators for a wide variety of industrial sources. J. Acoust. Soc. Am. 2010, 128, 1128–1139. [Google Scholar] [CrossRef] [PubMed]
- Asensio, C.; Gasco, L.; De Arcas, G.; López, J.; Alonso, J. Assessment of Residents’ Exposure to Leisure Noise in Málaga (Spain). Environments 2018, 5, 134. [Google Scholar] [CrossRef]
- Morel, J.; Marquis-Favre, C.; Gille, L. Noise annoyance assessment of various urban road vehicle pass-by noises in isolation and combined with industrial noise: A laboratory study. Appl. Acoust. 2016, 101, 47–57. [Google Scholar] [CrossRef]
- Directive of the European Parliament and of the Council of 25 June 2002 Relating to the Assessment and Management of Environmental Noise; Directive 2002/49/EC. 2002. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32002L0049&from=EN (accessed on 1 March 2019).
- Commission to the European Parliament and the Council. On the Implementation of the Environmental Noise Directive in Accordance with Article 11 of Directive 2002/49/EC. 2017. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:52017DC0151&from=EN (accessed on 1 March 2019).
- Bunn, F.; Zannin, P.H.T. Assessment of railway noise in an urban setting. Appl. Acoust. 2016, 104, 16–23. [Google Scholar] [CrossRef]
- Ruiz-Padillo, A.; Ruiz, D.P.; Torija, A.J.; Ramos-Ridao, A. Selection of suitable alternatives to reduce the environmental impact of road traffic noise using a fuzzy multi-criteria decision model. Environ. Impact Assess. Rev. 2016, 61, 8–18. [Google Scholar] [CrossRef]
- Gagliardi, P.; Fredianelli, L.; Simonetti, D.; Licitra, G. ADS-B System as a Useful Tool for Testing and Redrawing Noise Management Strategies at Pisa Airport. Acta Acust. United Acust. 2017, 103, 543–551. [Google Scholar] [CrossRef]
- Licitra, G. Noise Mapping in the EU: Models and Procedures; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Noise Abatement in Town Planning—Part 1: Fundamentals and Directions for Planning; DIN 18005-1. 2002. Available online: https://standards.globalspec.com/std/684900/din-18005-1 (accessed on 1 March 2019).
- Dutilleux, G.; Defrance, J.; Écotiere, D.; Gauvreau, B.; Bérengier, M.; Besnard, F.; Le Duc, E. NMPB-routes-2008: The revision of the french method for road traffic noise prediction. Acta Acust. United Acust. 2010, 96, 452–462. [Google Scholar] [CrossRef]
- Acoustique-Bruit dans l’environnement-Calcul de Niveaux Sonores (Acoustics-Environmental Noise-Calculation of Sound Levels); NF S31-133; ICS: 17.140.30; Association Française de Normalisation (AFNOR, French National Organization for Standardization): Mérignac, France, 2011.
- Jonasson, H.; Storeheier, S. Nord 2000. New Nordic Prediction Method for Road Traffic Noise; Borås, Sweden, 2001. [Google Scholar]
- Jónsson, G.; Jacobsen, F. A Comparison of Two Engineering Models for Outdoor Sound Propagation: Harmonoise and Nord 2000. Acta Acust. United Acust. 2008, 94, 282–289. [Google Scholar] [CrossRef]
- Salomons, E.; van Maercke, D.; Defrance, J.; de Roo, F. The Harmonoise Sound Propagation Model. Acta Acust. United Acust. 2011, 97, 62–74. [Google Scholar] [CrossRef]
- Defrance, J.; Salomons, E.; Noordhoek, I.; Heimann, D.; Plovsing, B.; Watts, G.; Jonasson, H.; Zhang, X.; Premat, E.; Schmich, I.; et al. Outdoor Sound Propagation Reference Model Developed in the European Harmonoise Project. Acta Acust. United Acust. 2007, 93, 213–227. [Google Scholar]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU)—EU Science Hub—European Commission; Number Report EUR 25379 EN; Joint Research Centre of the European Commission, Publications Office of the European Union: Luxembourg, 2012. [Google Scholar]
- Bellucci, P.; Peruzzi, L.; Zambon, G. LIFE DYNAMAP project: The case study of Rome. Appl. Acoust. 2017, 117 Pt B, 193–206. [Google Scholar] [CrossRef]
- Kanjo, E. NoiseSPY: A Real-Time Mobile Phone Platform for Urban Noise Monitoring and Mapping. Mob. Netw. Appl. 2010, 15, 562–574. [Google Scholar] [CrossRef]
- D’Hondt, E.; Stevens, M.; Jacobs, A. Participatory noise mapping works! An evaluation of participatory sensing as an alternative to standard techniques for environmental monitoring. Pervasive Mob. Comput. 2013, 9, 681–694. [Google Scholar] [CrossRef]
- Guillaume, G.; Can, A.; Petit, G.; Fortin, N.; Palominos, S.; Gauvreau, B.; Bocher, E.; Picaut, J. Noise mapping based on participative measurements. Noise Mapp. 2016, 3, 17. [Google Scholar] [CrossRef]
- Aiello, L.M.; Schifanella, R.; Quercia, D.; Aletta, F. Chatty maps: constructing sound maps of urban areas from social media data. R. Soc. Open Sci. 2016, 3, 150690. [Google Scholar] [CrossRef] [PubMed]
- Ventura, R.; Mallet, V.; Issarny, V. Assimilation of mobile phone measurements for noise mapping of a neighborhood. J. Acoust. Soc. Am. 2018, 144, 1279–1292. [Google Scholar] [CrossRef] [PubMed]
- Farcas, F.; Sivertun, A. Road Traffic Noise: GIS Tools for Noise Mapping And A Case Study for Skåne Region. ISPRS Workshop on quality, scale and analysis aspects of city models. Int. Soc. Photogramm. Remote Sens. 2009, XXXVIII-2/W11, 1–10. [Google Scholar]
- Yalcindag, N.S.; Ece, M.; Kilic, M.; Licitra, G.; Ascari, E. Effects of quality of data and their sources in the strategic noise mapping process. In Proceedings of the 23rd International Congress on Sound and Vibration: From Ancient to Modern Acoustics (ICSV), Athens, Greece, 10–14 July 2016; p. 8. [Google Scholar]
- Maguire, D.; Longley, P. The emergence of geoportals and their role in spatial data infrastructures. Comput. Environ. Urban Syst. 2005, 29, 3–14. [Google Scholar] [CrossRef]
- Nedovic-Budic, Z.; Crompvoets, J.; Georgiadou, Y. Spatial Data Infrastructures in Context: North and South; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Abramic, A.; Kotsev, A.; Cetl, V.; Kephalopoulos, S.; Paviotti, M. A Spatial Data Infrastructure for Environmental Noise Data in Europe. Int. J. Environ. Res. Public Health 2017, 14, 726. [Google Scholar] [CrossRef] [PubMed]
- King, E.; Rice, H. The development of a practical framework for strategic noise mapping. Appl. Acoust. 2009, 70, 1116–1127. [Google Scholar] [CrossRef]
- Directive of the European Parliament and of the Council of 14 March 2007 Establishing an Infrastructure for Spatial Information in the European Community (INSPIRE); Directive 2007/2/EC. 2007. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32007L0002&from=FR (accessed on 1 March 2019).
- Steiniger, S.; Bocher, E. An overview on current free and open source desktop GIS developments. Int. J. Geogr. Inf. Sci. 2009, 23, 1345–1370. [Google Scholar] [CrossRef]
- Mestayer, P.; Abidi, A.; André, M.; Bocher, E.; Bougnol, J.; Bourges, B.; Brécard, D.; Broc, J.; Bulteau, J.; Chiron, M.; et al. Urban mobility plan environmental impacts assessment: A methodology including socio-economic consequences—The Eval-PDU project. In Proceedings of the 10th Urban Environment Symposium, Urban Futures for a Sustainable World, Gothenburg, Sweden, 9–11 June 2010; p. 11. [Google Scholar]
- Mestayer, P.; Bourges, B.; Fouillé, L.; Bougnol, J.; Bocher, E.; Schmidt, T.; Picaut, J. Évaluation environnementale du PDU nantais 2000–2010 à partir des simulations numériques des scénarios alternatifs du programme Eval-PDU. Rech. Transp. Secur. 2015, 2015, 97–120. [Google Scholar] [CrossRef]
- Probst, W. Methods for the Calculation of Sound Propagation. In Proceedings of the 34th German Annual Conference on Acoustics, Dresden, Germany, 10–13 March 2008; p. 5. [Google Scholar]
- Probst, W. Multithreading, parallel computing and 64-bit mapping Software—Advanced techniques for large scale noise mapping. In Proceedings of the 34th German Annual Conference on Acoustics, Dresden, Germany, 10–13 March 2008; p. 2. [Google Scholar]
- De Kluijver, H.; Stoter, J. Noise mapping and GIS: Optimising quality and efficiency of noise effect studies. Comput. Environ. Urban Syst. 2003, 27, 85–102. [Google Scholar] [CrossRef]
- Reijnen, R.; Foppen, R.; Veenbaas, G. Disturbance by traffic of breeding birds: Evaluation of the effect and considerations in planning and managing road corridors. Biodivers. Conserv. 1997, 6, 567–581. [Google Scholar] [CrossRef]
- Li, B.; Tao, S.; Dawson, R.; Cao, J.; Lam, K. A {GIS} based road traffic noise prediction model. Appl. Acoust. 2002, 63, 679–691. [Google Scholar] [CrossRef]
- Pamanikabud, P.; Tansatcha, M. Geographical information system for traffic noise analysis and forecasting with the appearance of barriers. Environ. Model. Softw. 2003, 18, 959–973. [Google Scholar] [CrossRef]
- Department of Transport. Calculation of Road Traffic Noise (CoRTN); Her Majesty’s Stationery Office (HMSO): London, UK, 1988.
- Federal Highway Administration. Highway Traffic Noise Analysis and Abatement Policy and Guidance (FHWA); US Department of Transport: Washington, DC, USA, 1995.
- Gulliver, J.; Morley, D.; Vienneau, D.; Fabbri, F.; Bell, M.; Goodman, P.; Beevers, S.; Dajnak, D.; Kelly, F.; Fecht, D. Development of an open-source road traffic noise model for exposure assessment. Environ. Model. Softw. 2015, 74, 183–193. [Google Scholar] [CrossRef]
- Reed, S.; Boggs, J.; Mann, J. A GIS tool for modeling anthropogenic noise propagation in natural ecosystems. Environ. Model. Softw. 2012, 37, 1–5. [Google Scholar] [CrossRef]
- Dreher, M.; Dutilleux, G.; Junker, F. Optimized 3D ray tracing algorithm for environmental acoustic studies. Proc. Acoust. 2012, 2012, 1537–1542. [Google Scholar]
- Montgomery, G.; Schuch, H. GIS Data Quality. In GIS Data Conversion Handbook; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007; pp. 131–146. [Google Scholar]
- Veregin, H. Data quality parameters. Geogr. Inf. Syst. 1999, 1, 177–189. [Google Scholar]
- Biswas, S.; Lohani, B. Extraction of Spatial Parameters from Classified LIDAR Data and Aerial Photograph for Sound Modeling. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I-4, 59–64. [Google Scholar] [CrossRef]
- Singleton, A.; Spielman, S.; Brunsdon, C. Establishing a framework for Open Geographic Information science. Int. J. Geogr. Inf. Sci. 2016, 30, 1507–1521. [Google Scholar] [CrossRef]
- Salomons, E.; Zhou, H.; Lohman, W. Fast traffic noise mapping of cities using the Graphics Processing Unit of a personal computer. In Proceedings of the 43rd International Congress and Exposition on Noise Control Engineering, Melbourne, Australia, 16–19 November 2014; pp. 420–429. [Google Scholar]
- Can, A.; Van Renterghem, T.; Botteldooren, D. Exploring the use of mobile sensors for noise and black carbon measurements in an urban environment. Proc. Acoust. 2012, 2012, 1543–1548. [Google Scholar]
- Sétra. Road Noise Prediction-1: Calculating Sound Emissions from Road Traffic; Sétra: Bagneux, France, 2009. [Google Scholar]
- Sétra. Road Noise Prediction-2: Noise Propagation Computation Method Including Meteorological Effects (NMPB 2008); Sétra: Bagneux, France, 2009. [Google Scholar]
- Moehler, U.; Liepert, M.; Kurze, U.J.; Onnich, H. The new German prediction model for railway noise “Schall 03 2006”—Potentials of the new calculation method for noise mitigation of planned rail traffic. In Noise and Vibration Mitigation for Rail Transportation Systems; Springer: Berlin, Germany, 2008; pp. 186–192. [Google Scholar]
- Acoustics-Attenuation of Sound during Propagation Outdoors—Part 1: Calculation of thE Absorption of Sound by the Atmosphere; ISO 9613-1:1993; International Organization for Standardization: Geneva, Switzerland, 1993.
- Bocher, E.; Petit, G.; Fortin, N.; Palominos, S. H2GIS a spatial database to feed urban climate issues. In Proceedings of the 9th International Conference on Urban Climate (ICUC9), Toulouse, France, 20–24 July 2015. [Google Scholar]
- Bocher, E.; Petit, G. OrbisGIS: Geographical Information System Designed by and for Research; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; pp. 23–66. [Google Scholar]
- Herring, J. OpenGIS® Implementation Standard for Geographic Information—Simple Feature Access—Part 1: Common Architecture; Open Geospatial Consortium Inc.: Wayland, MS, USA, 2006; Volume 95. [Google Scholar]
- Herring, J. OpenGIS® Implementation Standard for Geographic Information—Simple Feature Access—Part 2: SQL Option; Open Geospatial Consortium Inc.: Wayland, MS, USA, 2006; Volume 95. [Google Scholar]
- Acoustique-Cartographie du Bruit en Milieu Extérieur-Élaboration des Cartes et Représentation Graphique (Acoustics-Cartography of Outside Environment Noise-Drawing Up of Maps and Graphical Representation); NF S31-130; ICS: 17.140.30; Association Française de Normalisation (AFNOR, French National Organization for Standardization): Mérignac, France, 2008.
- CERTU. Comment Réaliser les Cartes de Bruit Stratégiques en Agglomération. Mettre en œuvre la Directive 2002/49/CE (How To Realize the Strategic Noise Maps in Agglomeration. Implementing the Directive 2002/49/EC); Center for Studies on Urban Planning, Transportation and Public Facilities, Methodological Guide, Ed.; CERTU: Lyon, France, 2006. [Google Scholar]
- Fouillé, L.; Broc, J.; Bourges, B.; Bougnol, J.; Mestayer, P. La place des modèles de trafic dans les récentes modélisations des impacts environnementaux des transports. Importance de l’explicitation des méthodes et hypothèses. Rech. Transp. Secur. 2012, 28, 190–200. [Google Scholar] [CrossRef]
- Probst, F.; Probst, W.; Huber, B. Comparison of noise calculation methods. In Proceedings of the 40th International Congress and Exposition on Noise Control Engineering, Osaka, Japan, 4–7 September 2011; pp. 962–967. [Google Scholar]
- CERTU. Méthodes D’estimations de Population: Comparaisons et Seuils de Validité (Population Estimation Methods: Comparisons and Validity Thresholds); CERTU: Lyon, France, 2005. [Google Scholar]
- Décret Relatif à L’établissement des Cartes de Bruit et des Plans de Prévention du Bruit Dans L’environnement et Modifiant le code de L’urbanisme (Decree Related to the Drawing Up of Noise Maps and of Environmental Noise Prevention Plans); French Decree no. 2006-361, France, 2006. Available online: https://www.legifrance.gouv.fr/eli/decret/2006/3/24/2006-361/jo/texte (accessed on 1 March 2019).
- Gauvreau, B.; Guillaume, G.; Can, A.; Gaudio, N.; Lebras, J.; Lemonsu, A.; Masson, V.; Carissimo, B.; Richard, I.; Haouès-Jouve, S. Environmental quality at district scale: A transdisciplinary approach within the EUREQUA project. In Proceedings of the 1st International Conference on Urban Physics (FICUP), Quito, Galápagos, 25 September–2 October 2016. [Google Scholar]
- Girres, J.F.; Touya, G. Quality assessment of the French OpenStreetMap dataset. Trans. GIS 2010, 14, 435–459. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Li, L. Assuring the quality of volunteered geographic information. Spat. Stat. 2012, 1, 110–120. [Google Scholar] [CrossRef]
- Barron, C.; Neis, P.; Zipf, A. A comprehensive framework for intrinsic OpenStreetMap quality analysis. Trans. GIS 2014, 18, 877–895. [Google Scholar] [CrossRef]
- Senaratne, H.; Mobasheri, A.; Ali, A.L.; Capineri, C.; Haklay, M. A review of volunteered geographic information quality assessment methods. Int. J. Geogr. Inf. Sci. 2017, 31, 139–167. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [Hz] | 100 | 125 | 160 | 200 | 250 | 315 | 400 | 500 | 630 |
| [dB(A)] | −27 | −26 | −24 | −21 | −19 | −16 | −14 | −11 | −11 |
| [dB(A)] | −11.3 | −11.3 | −11.3 | −11.3 | −11.3 | −11.3 | −11.3 | −11.3 | −11.3 |
| [Hz] | 800 | 1k | 1.25k | 1.6k | 2k | 2.5k | 3.15k | 4k | 5k |
| [dB(A)] | −8 | −7 | −8 | −10 | −13 | −16 | −18 | −11 | −23 |
| [dB(A)] | −11.3 | −11.3 | −11.3 | −16.3 | −16.3 | 16.3 | −21.3 | −21.3 | −21.3 |
| RV | [dB(A)] | Correction [dB(A)] | |
|---|---|---|---|
| Years | Years | ||
| LV | |||
| HT | |||
| RV | v [km/h] | [dB(A)] | Correction [dB(A)] | ||
|---|---|---|---|---|---|
| % | Asc. % | Desc. % | |||
| LV | 20–30 | 0 | 0 | 0 | |
| 30–110 | 0 | 0 | 0 | ||
| 110–130 | 0 | 0 | 0 | ||
| HT | 20–70 | ||||
| 70–100 | 0 | ||||
| RV | Declivity p [%] | [dB(A)] |
|---|---|---|
| LV | all declivities | |
| HT | ||
| Asc. | ||
| Desc. |
| Ground Type | [dB(A)] | Correction [dB(A)] | |
|---|---|---|---|
| Classic Base | Absorber Base | ||
| Rigid | |||
| Grassy | |||
| Column Name | Data Type | Description |
|---|---|---|
| the_geom | Geometry | Polyline representing a road for a driving direction |
| lv_speed | Double | Average light vehicle speed |
| hv_speed | Double | Average heavy vehicle speed |
| lv_per_hour | Integer | Average number of light vehicles by hour |
| hv_per_hour | Integer | Average number of heavy vehicles by hour |
| begin_z | Double | Road start altitude |
| end_z | Double | Road end altitude |
| road_length2d | Double | Road length in 2 dimensions |
| Code | Description |
|---|---|
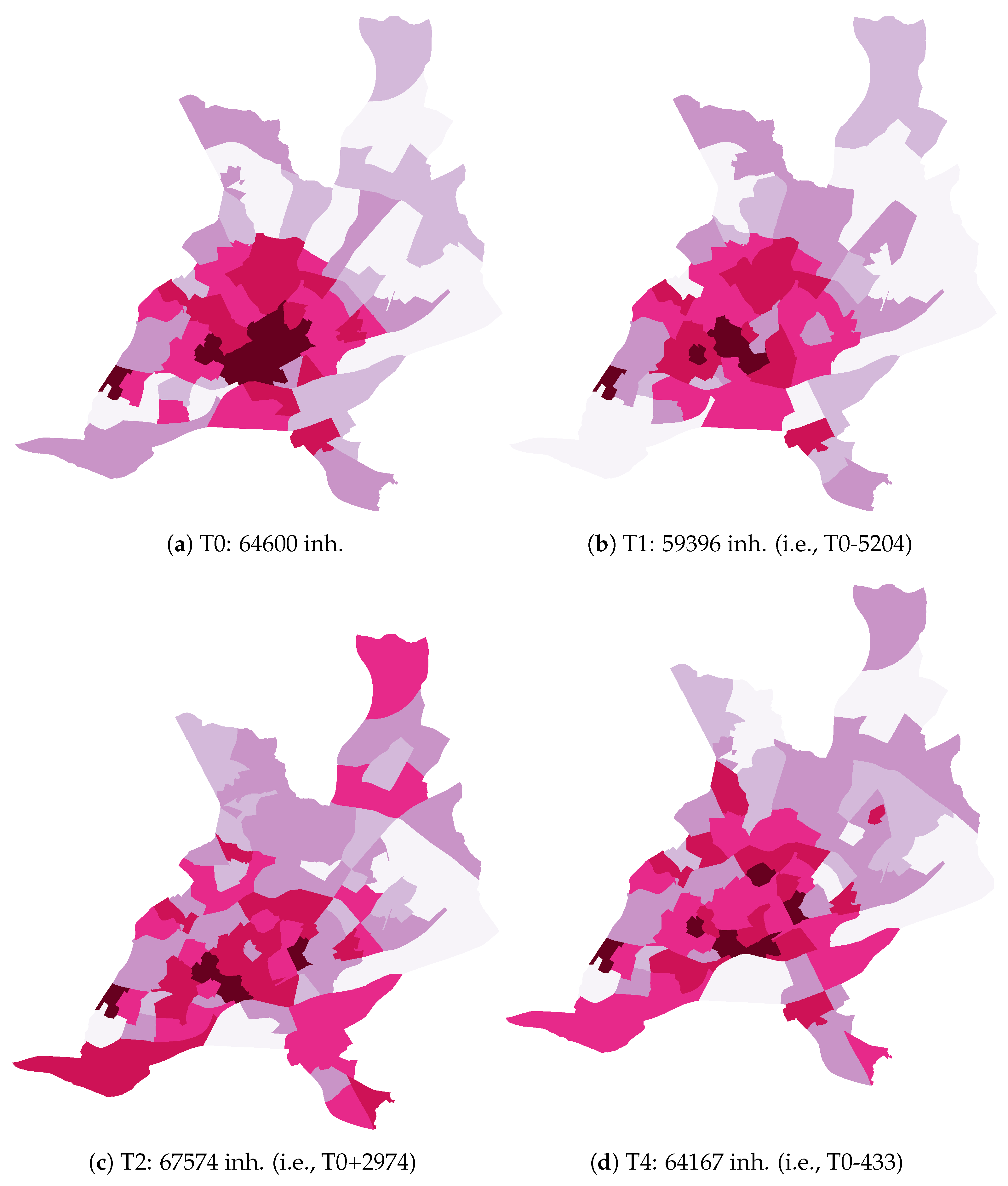
| T0 | Situation for the 2008 reference year |
| T1 | Drop of the automobiles demand by removing 25% of the automobiles trips, which witnesses a loading rates for vehicles up 33% |
| T2 | Increase in the travel demand up 20% (due to a 20%-growth of population or of the mobility) |
| T4 | Doubling of the fuel price |
| Period | 0:00 | 1 .a.m | 2:00 | 3:00 | 4:00 | 5:00 | 6:00 | 7:00 |
| Acoustic | night | day | ||||||
| RV | NOH | DOH | MRH | |||||
| TW | NOH | NOH | DOH | MRH | ||||
| Period | 8:00 | 9:00 | 10:00 | 11:00 | 12:00 | 1:00 | 2:00 | 3:00 |
| Acoustic | day | |||||||
| RV | MRH | DOH | ||||||
| TW | MRH | DOH | ||||||
| Period | 4:00 | 5:00 | 6:00 | 7:00 | 8:00 | 9:00 | 10:00 | 11:00 |
| Acoustic | day | evening | night | |||||
| RV | DOH | ERH | DOH | NOH | ||||
| TW | DOH | ERH | DOH | NOH | ||||
| [dB] | 2008 Base Year | T1 | T2 | T4 | ||||
|---|---|---|---|---|---|---|---|---|
| Pop. | Inh. | % | Inh. | % | Inh. | % | Inh. | % |
| <50 | 67,180 | 23.9 | 69,628 | 24.8 | 66,929 | 23.8 | 68,996 | 24.6 |
| 50–55 | 29,071 | 10.3 | 28,764 | 10.2 | 27,986 | 10.0 | 27,458 | 9.8 |
| 55–60 | 33,347 | 11.9 | 34,636 | 12.3 | 33,070 | 11.8 | 33,329 | 11.9 |
| 60–65 | 54,093 | 19.3 | 57,052 | 20.3 | 51,512 | 18.3 | 54,405 | 19.4 |
| 65–70 | 53,505 | 19.0 | 50,807 | 18.1 | 55,640 | 19.8 | 53,280 | 19.0 |
| 65–75 | 36,243 | 12.9 | 33,254 | 11.8 | 38,092 | 13.5 | 36,017 | 12.9 |
| >75 | 7478 | 2.6 | 6776 | 2.4 | 7688 | 2.7 | 7431 | 2.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bocher, E.; Guillaume, G.; Picaut, J.; Petit, G.; Fortin, N. NoiseModelling: An Open Source GIS Based Tool to Produce Environmental Noise Maps. ISPRS Int. J. Geo-Inf. 2019, 8, 130. https://doi.org/10.3390/ijgi8030130
Bocher E, Guillaume G, Picaut J, Petit G, Fortin N. NoiseModelling: An Open Source GIS Based Tool to Produce Environmental Noise Maps. ISPRS International Journal of Geo-Information. 2019; 8(3):130. https://doi.org/10.3390/ijgi8030130
Chicago/Turabian StyleBocher, Erwan, Gwenaël Guillaume, Judicaël Picaut, Gwendall Petit, and Nicolas Fortin. 2019. "NoiseModelling: An Open Source GIS Based Tool to Produce Environmental Noise Maps" ISPRS International Journal of Geo-Information 8, no. 3: 130. https://doi.org/10.3390/ijgi8030130
APA StyleBocher, E., Guillaume, G., Picaut, J., Petit, G., & Fortin, N. (2019). NoiseModelling: An Open Source GIS Based Tool to Produce Environmental Noise Maps. ISPRS International Journal of Geo-Information, 8(3), 130. https://doi.org/10.3390/ijgi8030130