A GIS-Based Tool for Automatic Bankfull Detection from Airborne High Resolution Dem


Abstract
1. Introduction
2. Methods
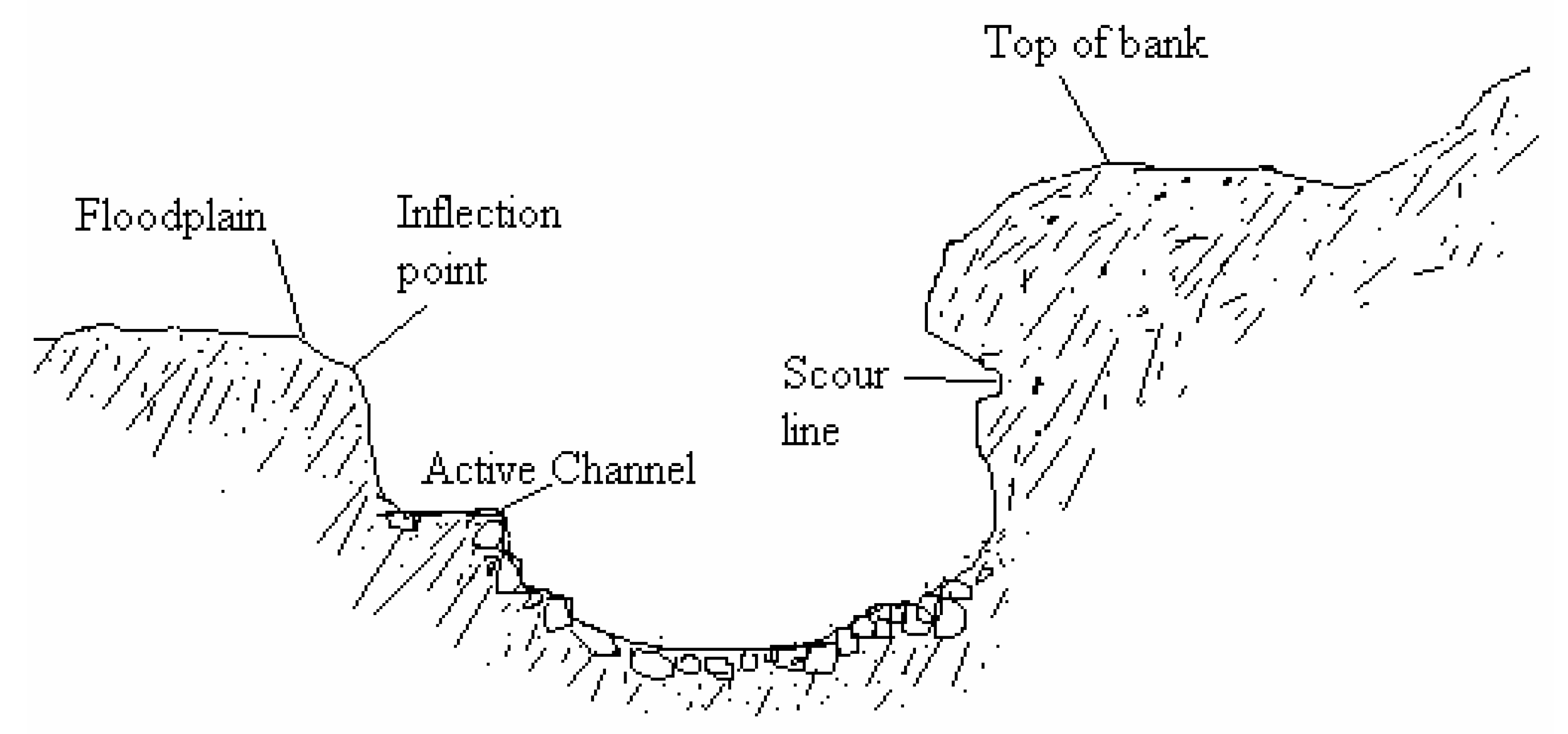
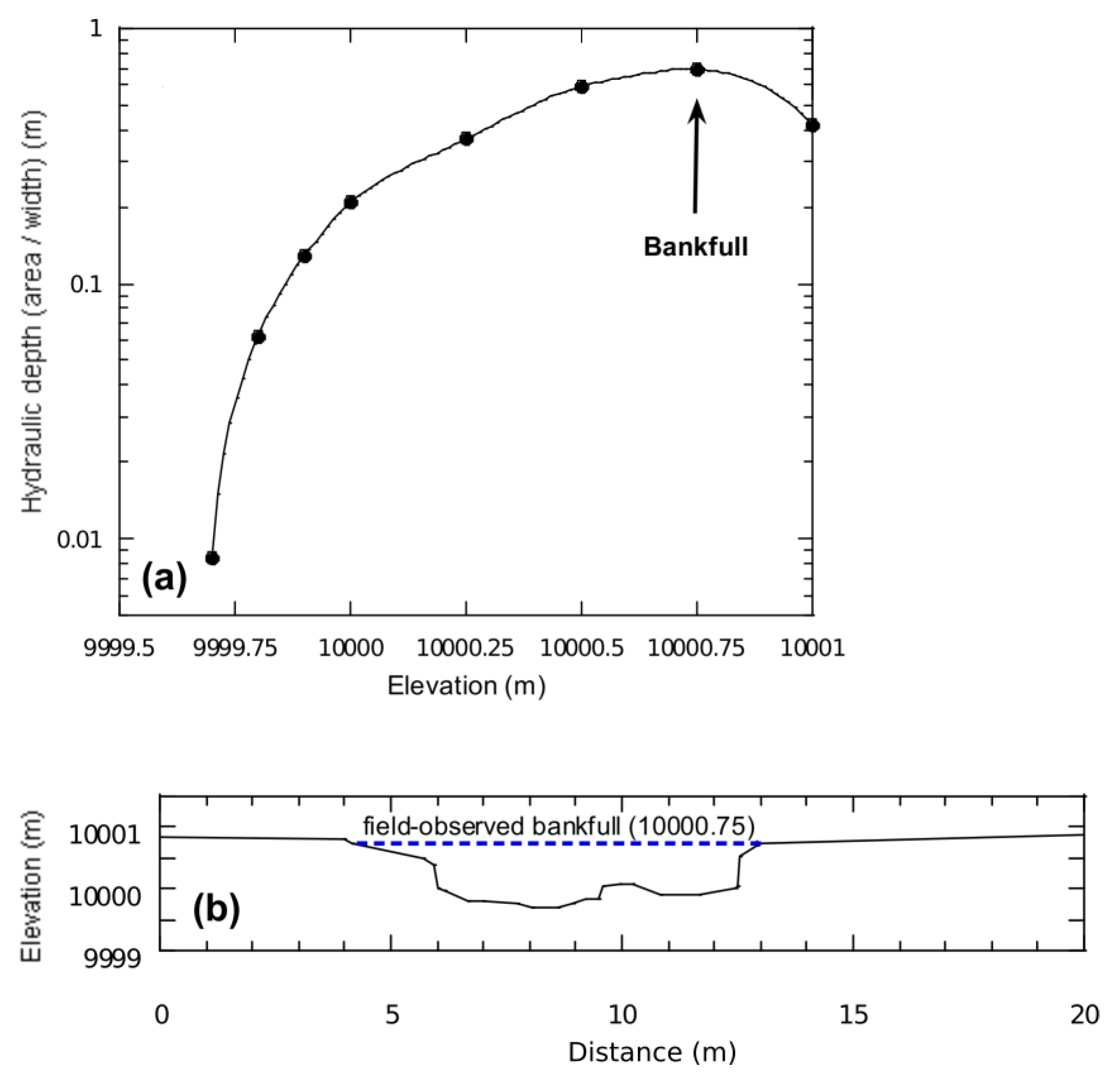
2.1. The Bankfull Definition
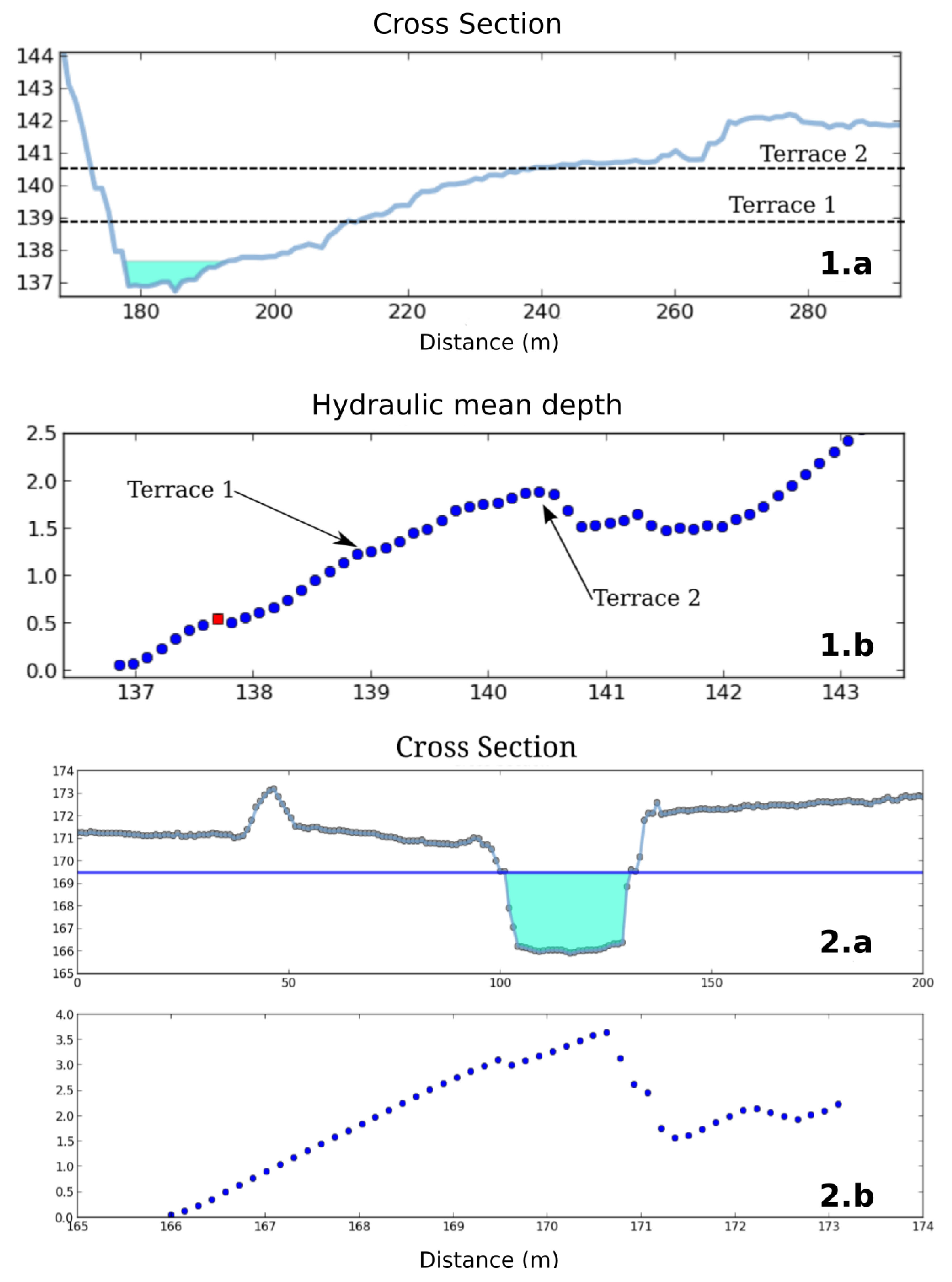
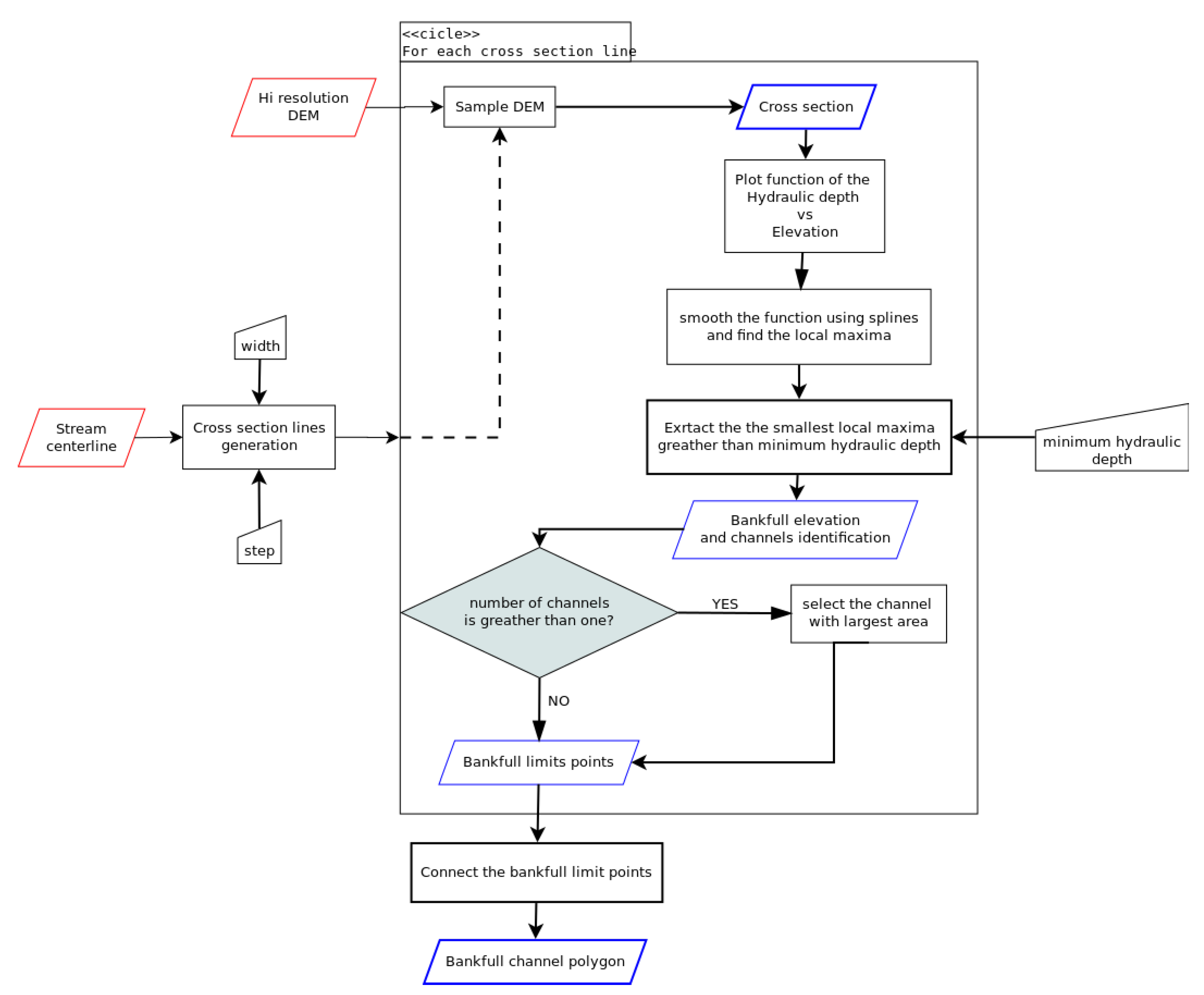
2.2. Algorithm Description
3. Calculation
- the cross-section should be extended until it reaches the limit of the alluvial plain/slope/fluvial terrace;
- cross-sections should not overlap each other to avoid or reduce topological problems in the output polygon.
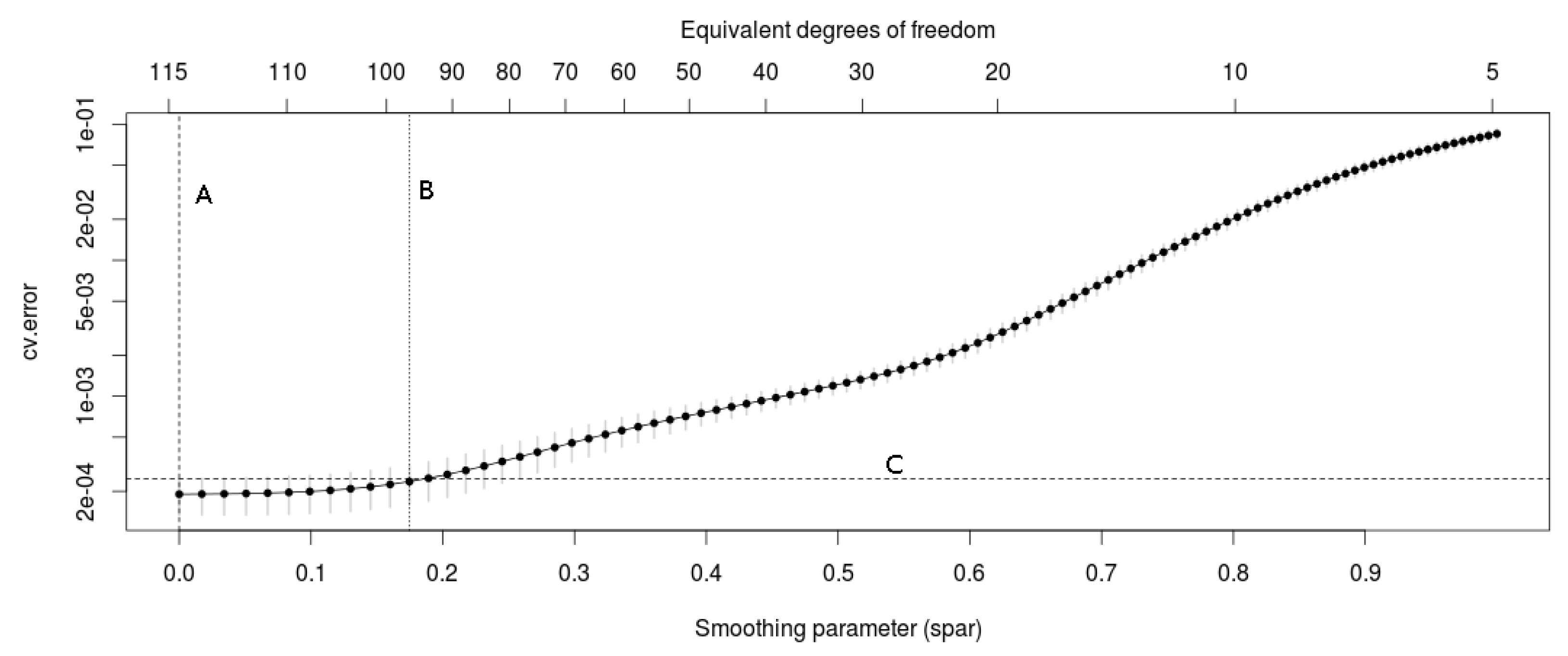
3.1. Smoothing Procedure
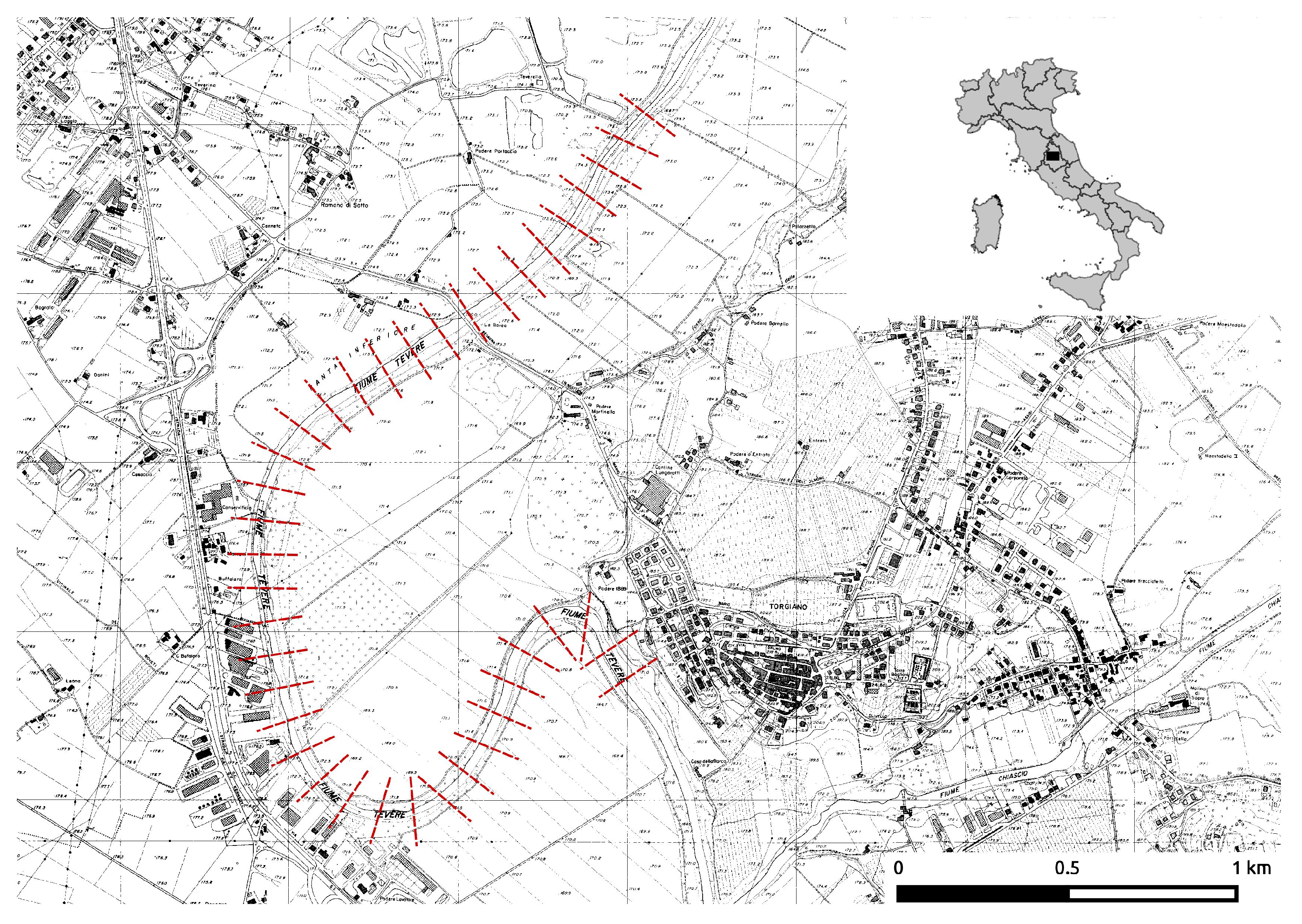
3.2. Case Study: The Tiber River
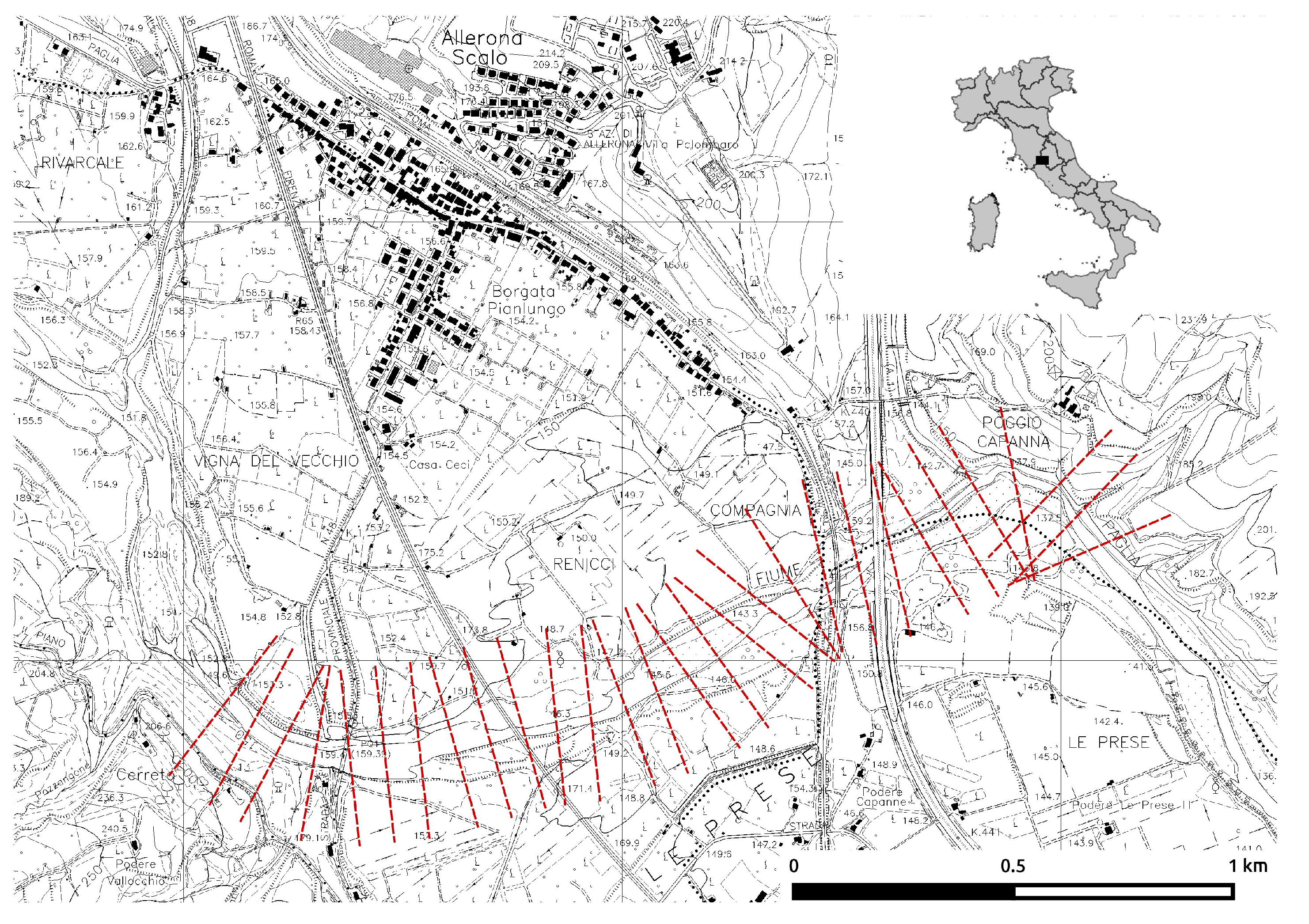
3.3. Case Study: The River Paglia
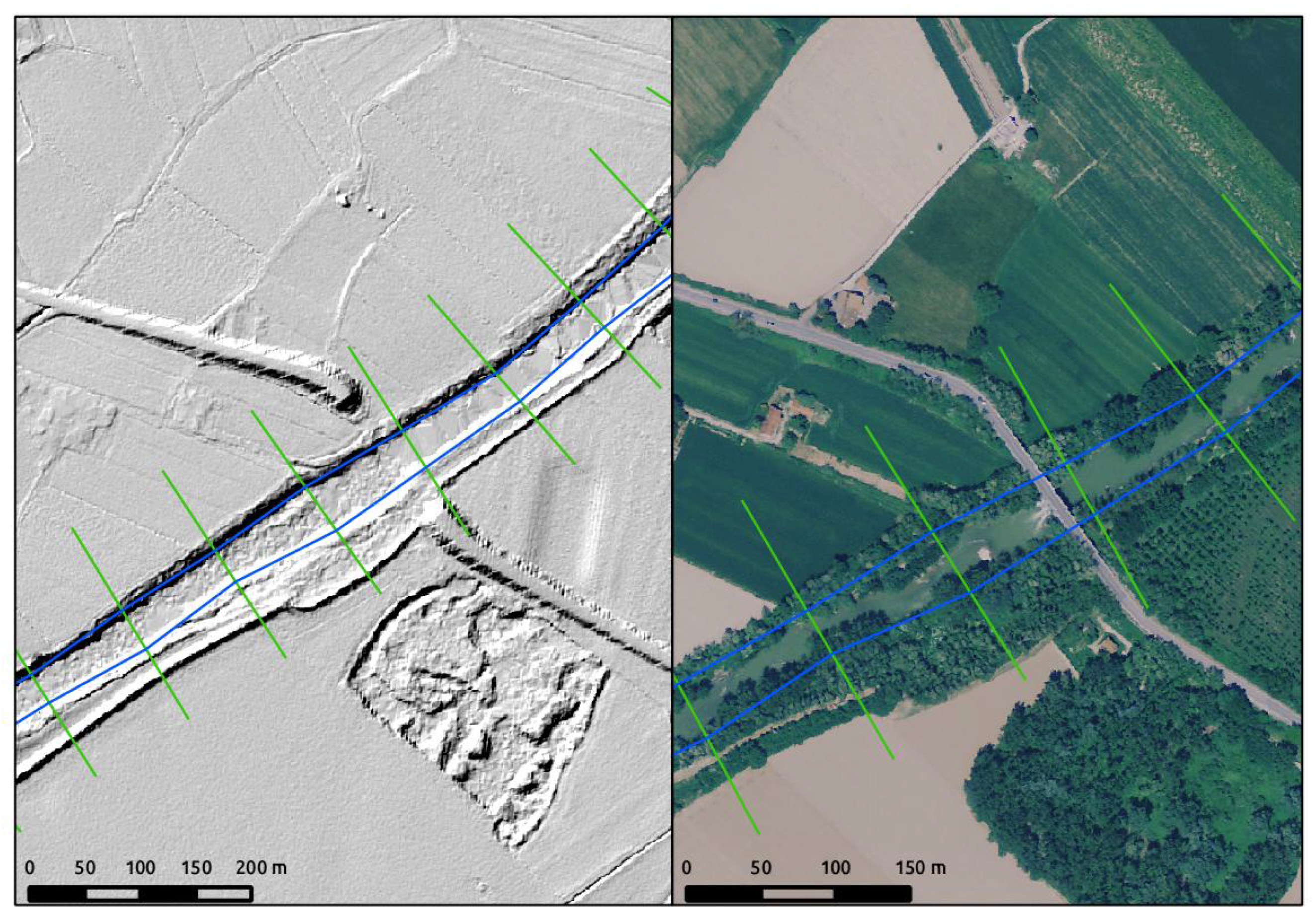
4. Results and Discussion
5. Conclusions
Supplementary Materials
Supplementary File 1Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ALS | Airborne Laser Scanning |
| NG | National Geoportal |
| DEM | Digital Elevation Model |
References
- McKean, J.; Isaak, D.; Wright, W. Improving Stream Studies With a Small-Footprint Green Lidar. Eos Trans. Am. Geophys. Union 2009, 90, 341–342. [Google Scholar] [CrossRef]
- McKean, J.; Isaak, D.; Wright, C. Stream and riparian habitat analysis and monitoring with a high-resolution terrestrial-aquatic LiDAR. In PNAMP Special Publication: Remote Sensing Applications for Aquatic Resource Monitoring; Pacific Northwest Aquatic Monitoring Partnership: Cook, WA, USA, 2009; pp. 7–16. [Google Scholar]
- McKean, J.A.; Isaak, D.J.; Wright, C.W. Geomorphic controls on salmon nesting patterns described by a new, narrow-beam terrestrial-aquatic lidar. Front. Ecol. Environ. 2008, 6, 125–130. [Google Scholar] [CrossRef]
- Rapinel, S.; Hubert-Moy, L.; Clément, B. Combined use of LiDAR data and multispectral earth observation imagery for wetland habitat mapping. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 56–64. [Google Scholar] [CrossRef]
- Lallias-Tacon, S.; Liébault, F.; Piégay, H. Use of airborne LiDAR and historical aerial photos for characterising the history of braided river floodplain morphology and vegetation responses. Catena 2017, 149, 742–759. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Murray, H.D. Estimation of erosion and deposition volumes in a large, gravel-bed, braided river using synoptic remote sensing. Earth Surf. Process. Landf. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Charlton, M.E.; Large, A.R.; Fuller, I.C. Application of airborne LiDAR in river environments: The River Coquet, Northumberland, UK. Earth Surf. Process. Landf. 2003, 28, 299–306. [Google Scholar] [CrossRef]
- Milan, D.J.; Heritage, G.L.; Hetherington, D. Application of a 3D laser scanner in the assessment of erosion and deposition volumes and channel change in a proglacial river. Earth Surf. Process. Landf. 2007, 32, 1657–1674. [Google Scholar] [CrossRef]
- Cavalli, M.; Tarolli, P.; Marchi, L.; Dalla Fontana, G. The effectiveness of airborne LiDAR data in the recognition of channel-bed morphology. Catena 2008, 73, 249–260. [Google Scholar] [CrossRef]
- Cavalli, M.; Tarolli, P. Application of LiDAR technology for rivers analysis. Ital. J. Eng. Geol. Environ. 2011, 11. [Google Scholar] [CrossRef]
- Legleiter, C. Remote measurement of river morphology via fusion of LiDAR topography and spectrally based bathymetry. Earth Surf. Process. Landf. 2012, 37, 499–518. [Google Scholar] [CrossRef]
- Hilldale, R.C.; Raff, D. Assessing the ability of airborne LiDAR to map river bathymetry. Earth Surf. Process. Landf. 2008, 33, 773–783. [Google Scholar] [CrossRef]
- Shaker, A.; Yan, W.Y.; LaRocque, P.E. Automatic land-water classification using multispectral airborne LiDAR data for near-shore and river environments. ISPRS J. Photogramm. Remote. Sens. 2019, 152, 94–108. [Google Scholar] [CrossRef]
- Yan, W.Y.; Shaker, A.; LaRocque, P.E. Scan Line Intensity-Elevation Ratio (SLIER): An Airborne LiDAR Ratio Index for Automatic Water Surface Mapping. Remote Sens. 2019, 11, 814. [Google Scholar] [CrossRef]
- De Rosa, P.; Fredduzzi, A.; Cencetti, C. Stream Power Determination in GIS: An Index to Evaluate the Most ‘Sensitive’Points of a River. Water 2019, 11, 1145. [Google Scholar] [CrossRef]
- Benson, M.; Thomas, D. A definition of dominant discharge. Hydrol. Sci. J. 1966, 11, 76–80. [Google Scholar] [CrossRef]
- Wolman, M.G.; Miller, J.P. Magnitude and frequency of forces in geomorphic processes. J. Geol. 1960, 68, 54–74. [Google Scholar] [CrossRef]
- Leopold, L.B.; Wolman, M.G.; Miller, J.P. Fluvial Processes in Geomorphology; Courier Dover Publications: New York, NY, USA, 1964. [Google Scholar]
- Cencetti, C.; De Rosa, P.; Fredduzzi, A. Geoinformatics in morphological study of River Paglia, Tiber River basin, Central Italy. Environ. Earth Sci. 2017, 76, 128. [Google Scholar] [CrossRef]
- Brigante, R.; Cencetti, C.; De Rosa, P.; Fredduzzi, A.; Radicioni, F.; Stoppini, A. Use of aerial multispectral images for spatial analysis of flooded riverbed-alluvial plain systems: The case study of the Paglia River (central Italy). Geomat. Nat. Hazards Risk 2017, 8, 1126–1143. [Google Scholar] [CrossRef]
- Ritter, J.; Rumschlag, J.; Zaleha, M. Evaluating recent streams channel and pattern changes for streams resource protection and restoration: An example from West-central Ohio. J. Great Lakes Resour. 2007, 33, 154–166. [Google Scholar] [CrossRef]
- Jayakaran, A.D.; Ward, A.D. Geometry of inset channels and the sediment composition of fluvian benches in agricultural drainage systems in Ohio. J. Soil Water Conserv. 2007, 62, 296–307. [Google Scholar]
- USDA National Conservation Center. Federal Interagency Stream Restoration Working Group. Stream Corridor Restoration: Principles, Processes, and Practices; River Restoration Centre: Bedfordshire, UK, 1998.
- Dunne, T.; Leopold, L.B. Water in Environmental Planning; Macmillan: London, UK, 1978. [Google Scholar]
- Harrelson, C.C.; Rawlins, C.L.; Potyondy, J.P. Stream Channel Reference Sites: An Illustrated Guide to Field Technique; Gen. Tech. Rep. RM-245; US Department of Agriculture, Forest Service, Rocky Mountain Forest and Range Experiment Station: Fort Collins, CO, USA, 1994; 61p. [Google Scholar]
- McCandless, T.L.; Everett, R.A. Maryland Stream Survey, Bankfull Discharge and Channel Characteristics of Streams in the Piedmont Hydrologic Region; US Fish & Wildlife Service, Chesapeake Bay Field Office: Annapolis, MD, USA, 2002. [Google Scholar]
- McKean, J.; Isask, D.; Wright, W. Mapping channel morphology and stream habitat with a full wave-form green lidar. EOS Trans. Am. Geophys. Union 2005, 86, 28. [Google Scholar]
- Williams, G.P. Bank-full discharge of rivers. Water Resour. Res. 1978, 14, 1141–1154. [Google Scholar] [CrossRef]
- Faux, R.; Buffington, J.M.; Whitley, G.; Lanigan, S.; Roper, B. Use of airborne near-infrared LiDAR for determining channel cross-section characteristics and monitoring aquatic habitat in Pacific Northwest rivers: A preliminary analysis. In PNAMP Special Publication: Remote Sensing Applications for Aquatic Resource Monitoring; Pacific Northwest Aquatic Monitoring Partnership: Cook, WA, USA, 2009; pp. 43–60. [Google Scholar]
- Cluer, B.; Thorne, C. A stream evolution model integrating habitat and ecosystem benefits. River Res. Appl. 2014, 30, 135–154. [Google Scholar] [CrossRef]
- QGis DT. Quantum GIS geographic information system. Open Source Geospatial Foundation Project. 2011. Available online: http://qgis.osgeo.org (accessed on 21 October 2019).
- Hugentobler, M.; Duster, H.; Sutton, T. Extending the Functionality of QGIS with Python Plugins. In Proceedings of the 2008 Free and Open Source Software for Geospatial Conference, Cape Town, South Africa, 29 September–3 October 2008. [Google Scholar]
- Cencetti, C.; De Rosa, P.; Fredduzzi, A. Analysis of the evolution of a riverbed using CAESAR, a cellular automata model. Rend. Online Della Soc. Geol. Ital. 2013, 24, 49–51. [Google Scholar]
- Cencetti, C.; De Rosa, P.; Fredduzzi, A. Evoluzione morfologico-sedimentaria dell’alveo del F. Paglia (bacino del F. Tevere) nella sua bassa valle. In Proceedings of the Atti del Convegno ’Dialogo intorno al Paesaggio. Percezione, Interpretazione, Rappresentazione’, Perugia, Italy, 19–22 February 2013. [Google Scholar]
- Cencetti, C.; De Rosa, P.; Fredduzzi, A.; Tacconi, P. Studio Sulla Dinamica Fluviale per la Gestione Morfo Sedimentaria del Sistema Alveo-Pianura Fluviale del Fiume Paglia; Technical Report; Provincia di Terni: Terni, Italy, 2013. [Google Scholar]
- De Rosa, P. BankFull Detection Tool for QGIS 2.x. 2014. Available online: https://zenodo.org/record/3362344#.XbKbjcQRWUl (accessed on 21 October 2019). [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2017. [Google Scholar]
- Tadaki, M.; Brierley, G.; Cullum, C. River classification: Theory, practice, politics. Wiley Interdiscip. Rev. Water 2014, 1, 349–367. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Tevere Reach | Paglia Reach |
|---|---|---|
| real mean bankfull width (m) | 36.80 | 65.79 |
| plugin mean bankfull width (m) | 34.87 | 52.22 |
| difference (m) | 1.93 | 13.58 |
| difference % | 5.23% | 20.63% |
| mean difference | 1.93 | 13.58 |
| standard deviation error | 5.73 | 35.67 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Rosa, P.; Fredduzzi, A.; Cencetti, C. A GIS-Based Tool for Automatic Bankfull Detection from Airborne High Resolution Dem. ISPRS Int. J. Geo-Inf. 2019, 8, 480. https://doi.org/10.3390/ijgi8110480
De Rosa P, Fredduzzi A, Cencetti C. A GIS-Based Tool for Automatic Bankfull Detection from Airborne High Resolution Dem. ISPRS International Journal of Geo-Information. 2019; 8(11):480. https://doi.org/10.3390/ijgi8110480
Chicago/Turabian StyleDe Rosa, Pierluigi, Andrea Fredduzzi, and Corrado Cencetti. 2019. "A GIS-Based Tool for Automatic Bankfull Detection from Airborne High Resolution Dem" ISPRS International Journal of Geo-Information 8, no. 11: 480. https://doi.org/10.3390/ijgi8110480
APA StyleDe Rosa, P., Fredduzzi, A., & Cencetti, C. (2019). A GIS-Based Tool for Automatic Bankfull Detection from Airborne High Resolution Dem. ISPRS International Journal of Geo-Information, 8(11), 480. https://doi.org/10.3390/ijgi8110480