Development of a QGIS Plugin to Obtain Parameters and Elements of Plantation Trees and Vineyards with Aerial Photographs




Abstract
1. Introduction
2. Study case and Data Acquisition
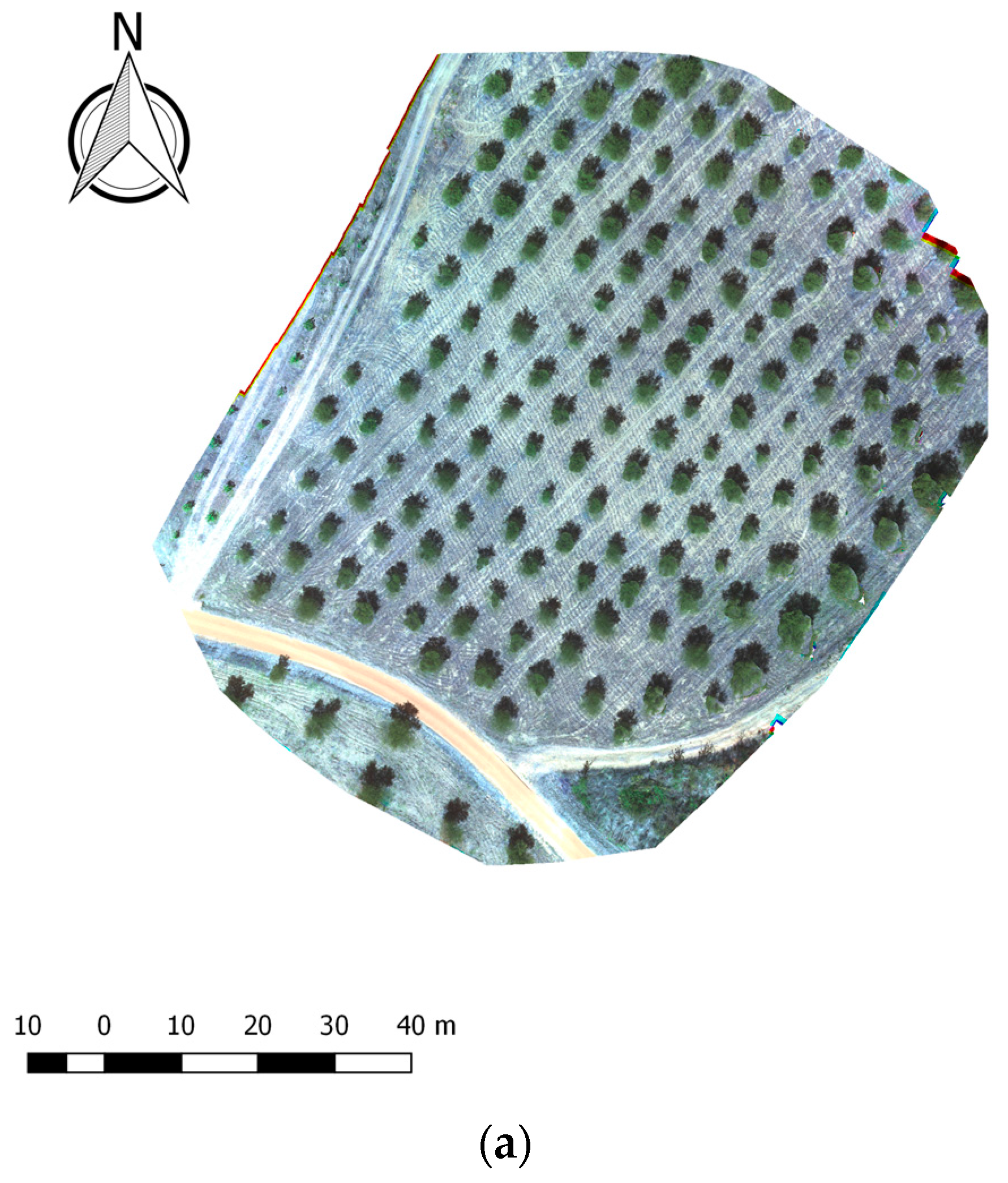
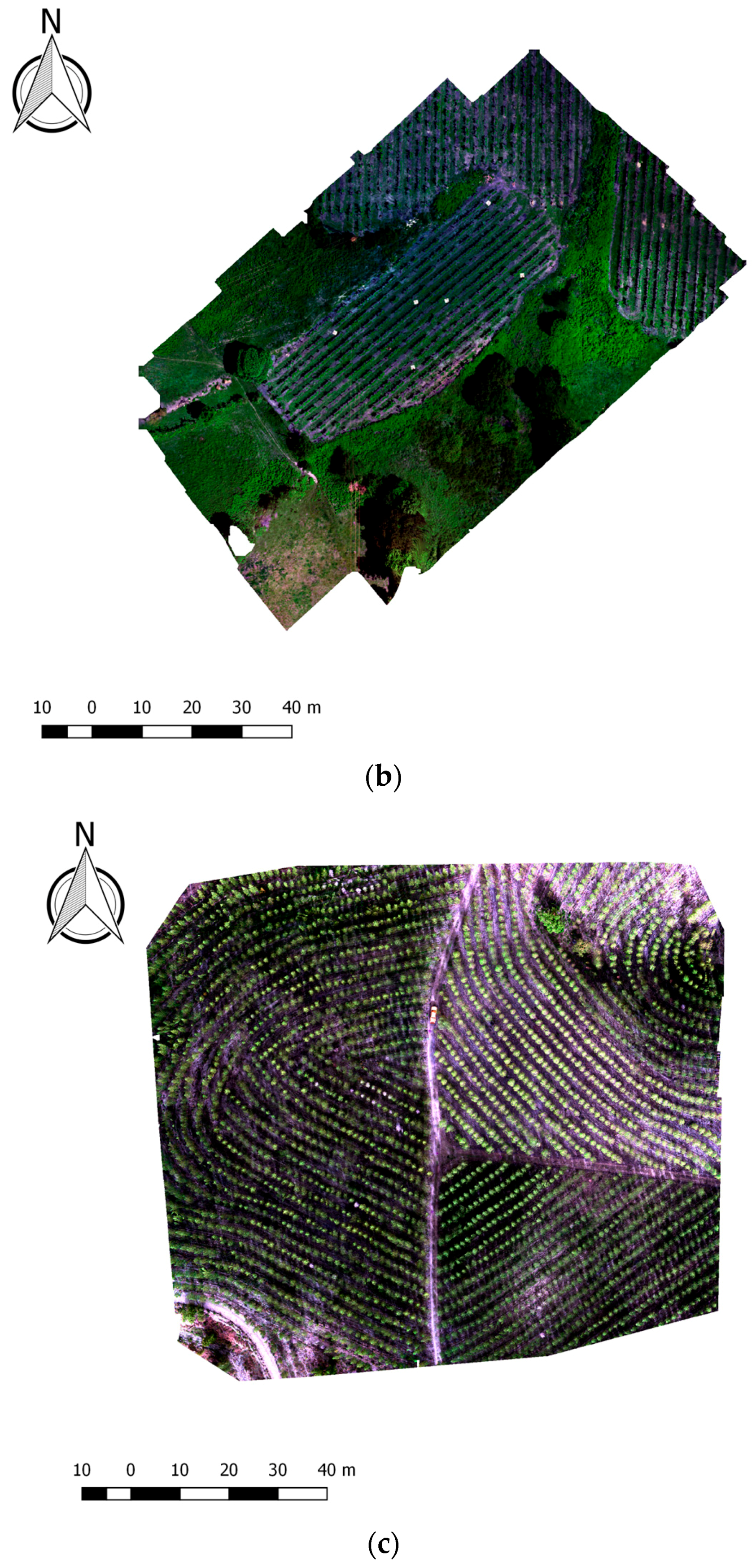
2.1. Study Case
2.2. Data Acquisition
3. Methodology
3.1. GIS Software, Python Libraries and Tree Crown Application
3.2. Procedures Tested
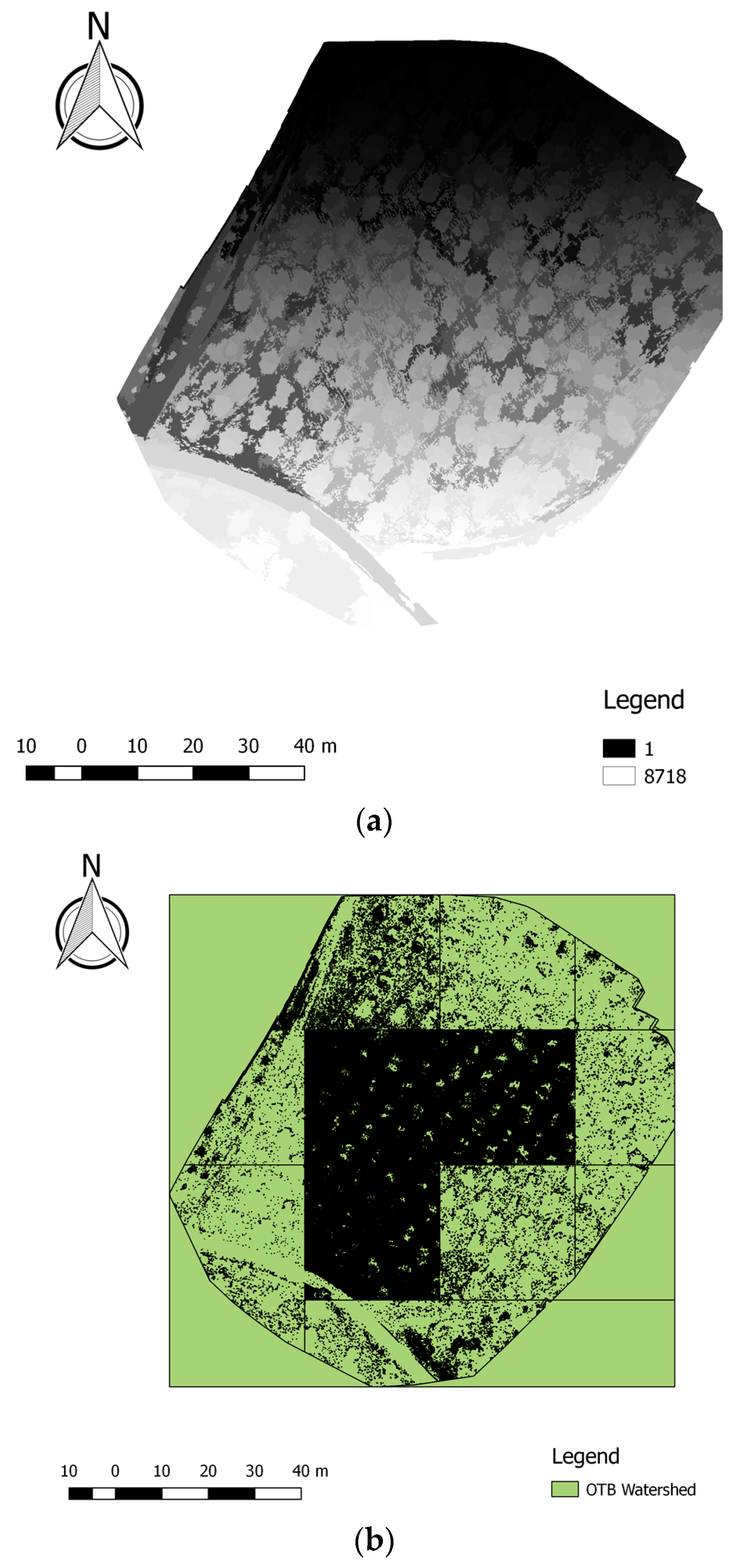
3.2.1. OBIA Segmentation
3.2.2. OBIA Classification
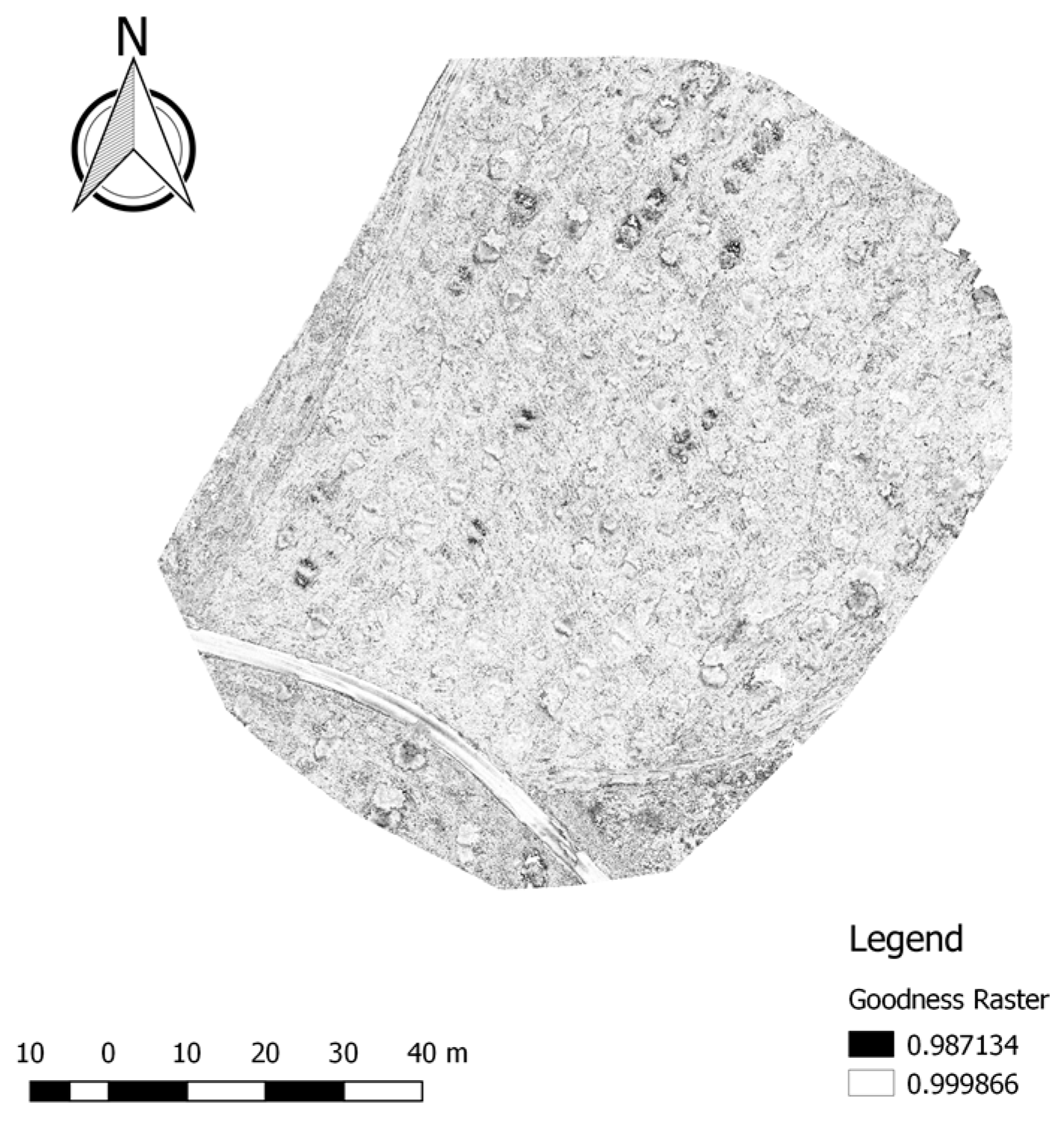
3.2.3. Fractal Analysis
4. Results and Discussion
4.1. Experimental Procedure
4.1.1. OBIA Segmentation
4.1.2. OBIA Classification
4.1.3. Fractal Analysis
4.2. GIS Open Source Application
4.3. Processing Time
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Santoro, F.; Tarantino, E.; Figorito, B.; Gualano, S.; D’Onghia, A.M. A tree counting algorithm for precision agriculture tasks. Int. J. Digit. Earth 2013, 6. [Google Scholar] [CrossRef]
- Bazi, Y.; Malek, S.; Alajlan, N.; AlHichri, H. An Automatic Approach for Palm Tree Counting in UAV Images. Presented at the IEEE Geoscience and Remote Sensing Symposium IGARS, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Pierrot-Deseilligny, M. Presentation, IGN/ENSG, France, Institut Geographique National. Available online: http://perso.telecomparistech.fr/~tupin/JTELE/PRES012009/Deseilligny.pdf (accessed on 10 March 2016).
- Tian, J.Y.; Wang, L.; Li, X.J.; Gong, H.L.; Shi, C.; Zhong, R.F.; Liu, X.M. Comparison of UAV and WorldView-2 imagery for mapping leaf area index of mangrove forest. Int. J. Appl. Earth Obs. Geoinform. 2017, 61, 22–31. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kandukuri, M.; Dokania, A.; Ramesh, K.N. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods. Comput. Electron. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Suh, J.; Choi, Y. Mapping hazardous mining-induced sinkhole subsidence using unmanned aerial vehicle (drone) photogrammetry. Environ. Earth Sci. 2017, 76. [Google Scholar] [CrossRef]
- McKenna, P.; Erskine, P.D.; Lechner, A.M.; Phinn, S. Measuring fire severity using UAV imagery in semi-arid central Queensland, Australia. Int. J. Remote Sens. 2017, 38, 4244–4264. [Google Scholar] [CrossRef]
- Kang, J.; Wang, L.; Chen, F.; Niu, Z. Identifying tree canopy areas in undulating eucalyptus plantations using JSEG multi-scale segmentation and unmanned aerial vehicle near-infrared imagery. Int. J. Remote Sens. 2017, 38, 2296–2312. [Google Scholar]
- Park, T.; Cho, J.; Lee, J.; Lee, W.; Choi, S.; Kwak, D.; Kim, M. Unconstrained approach for isolating individual trees using high-resolution aerial imagery. Int. J. Remote Sens. 2014, 35, 89–114. [Google Scholar] [CrossRef]
- Hassaan, O.; Nasir, A.K.; Roth, H.; Khan, M.F. Precision Forestry: Trees Counting in Urban Areas Using Visible Imagery based on an Unmanned Aerial Vehicle. IFAC-PapersOnLine 2016, 49–16, 16–21. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppa, J.; Saari, H.; Polonen, I.; Imai, N.N. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Özcan, A.H.; Hisar, D.; Sayar, Y.; Ünsalan, C. Tree canopy detection and delineation in satellite images using probabilistic voting. Remote Sens. Lett. 2017, 8, 761–770. [Google Scholar] [CrossRef]
- Koukoulas, S.; Blacknurn, G.A. Mapping individual tree location, height and species in broadleaved deciduous forest using airborne LIDAR and multi-spectral remotely sensed data. Int. J. Remote Sens. 2007, 26, 431–455. [Google Scholar] [CrossRef]
- Katoh, M.; Gougeon, F.A. Improving the Precision of Tree Counting by Combining Tree Detection with Canopy Delineation and Classification on Homogeneity Guided Smoothed High Resolution (50 cm) Multispectral Airborne Digital Data. Remote Sens. 2012, 4, 1411–1424. [Google Scholar] [CrossRef]
- Tanhuanpaa, T.; Saarinen, N.; Kankare, V.; Nurminen, K.; Vastaranta, M.; Honkavaara, E.; Karjalainen, M.; Yu, X.; Holopainen, M.; Hyyppa, J. Evaluating the Performance of High-Altitude Aerial Image-Based Digital Surface Models in Detecting Individual Tree Canopys in Mature Boreal Forests. Forests 2016, 7, 143. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Wei, T.; Lin, Y.; Yan, L.; Zhang, L. Tree species classification based on stem-related feature parameters derived from static terrestrial laser scanning data. Int. J. Remote Sens. 2016, 37, 4420–4440. [Google Scholar] [CrossRef]
- Yin, D.; Wang, L. How to assess the accuracy of the individual tree-based forest inventory derived from remotely sensed data: A review. Int. J. Remote Sens. 2016, 37, 4521–4553. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A Review of Methods and Applications of the Geometric Characterization of Tree Crops in Agricultural Activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, S.; Li, D.; Wang, C.; Yang, J. Papaya Tree Detection with UAV Iamges Using a GPU-Accelerated Scale-Space Filtering Method. Remote Sens. 2017, 9, 721. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of Multi-Temporal UAV-Derived Imagery for Estimating Individual Tree Growth in Pinus pinea Stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Deng, G.; Li, Z.; Wu, H.; Zhang, X. Automated Extracting Tree Canopy from Quickbird Stand Image. In Proceedings of the 4th Conference on Computer and Computing Technologies in Agriculture (CCTA), Nanchang, China, 22–25 October 2010; IFIP Advances in Information and Communication Technology, AICT-344 (Part I). Springer: Berlin/Heidelberg, Germany, 2010; pp. 304–311. [Google Scholar]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colourdigital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinform. 2016, 47, 60–68. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and canopy diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogr. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogr. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef]
- Teodoro, A.C.; Araújo, R. A Comparison of Performance of OBIA Techniques Available in Open Source Software (Spring and OTB/Monteverdi) considering Very High Spatial Resolution Data. J. Appl. Remote Sens. 2016, 10, 016011. [Google Scholar] [CrossRef]
- Shahzad, N.; Ahmad, S.R.; Ashraf, S. An assessment of pan-sharpening algorithms for mapping mangrove ecosystems: A hybrid approach. Int. J. Remote Sens. 2017, 38, 1579–1599. [Google Scholar] [CrossRef]
- GRASS GIS. 2017. The World’s Leading Free GIS Software. Available online: http://grass.osgeo.org/ (accessed on 10 March 2017).
- Orfeu Toolbox (OTB). 2017. Orfeo Toolbox Is Not a Black Box. Available online: https://www.orfeo-toolbox.org/ (accessed on 10 March 2017).
- GNU Operating System. 2017. Stallman Four Freedoms. Available online: https://www.gnu.org/philosophy/free-sw.html (accessed on 12 March 2017).
- QGIS. 2017. QGIS Project. Available online: http://www.qgis.org/ (accessed on 10 March 2017).
- Grippa, T.; Lennert, M.; Beaumont, B.; Vanhuysse, S.; Stephenne, N.; Wolff, E. An Open-Source Semi-Automated Processing Chain for Urban Object-Based Classification. Remote Sens. 2017, 9, 358. [Google Scholar] [CrossRef]
- Duarte, L.; Teodoro, A.C.; Moutinho, O.; Gonçalves, J.A. Open-source GIS application for UAV photogrammetry based on MicMac. Int. J. Remote Sens. 2016, 38, 8–10. [Google Scholar] [CrossRef]
- Reed, B.C.; Brown, J.F.; VanderZee, D.; Loveland, T.R.; Merchant, J.W.; Ohlen, D.O. Measuring phenological variability from satellite imagery. J. Veg. Sci. 1994, 5, 703–714. [Google Scholar] [CrossRef]
- Python. 2017. Python Programming Language. Available online: http://python.org/ (accessed on 9 March 2016).
- QGIS API. 2017. QGIS API Documentation. Available online: http://www.qgis.org/api/ (accessed on 10 March 2017).
- PyQt4 API. 2017. PyQt Class Reference. Available online: http://pyqt.sourceforge.net/Docs/ PyQt4/classes.html (accessed on 10 March 2016).
- Qt Designer. 2017. Qt Documentation. Available online: http://doc.qt.io/qt-4.8/designer-manual.html (accessed on 10 March 2017).
- Momsen, E.; Metz, M. Grass Osgeo Manual i.segment. Available online: https://grass.osgeo.org/grass73/manuals/i.segment.html (accessed on 5 December 2016).
- Awf-Wik. 2017. Forest Inventory Remote Sensing. Supervised Classification (Tutorial). Available online: http://wiki.awf.forst.uni-goettingen.de/wiki/index.php/Supervised_classification (accessed on 12 March 2017).
- Awf-Wik. 2017. Forest Inventory Remote Sensing. Unsupervised Classification (Tutorial). Available online: http://wiki.awf.forst.uni-goettingen.de/wiki/index.php/Unsupervised_classification (accessed on 12 March 2017).
- Klinger, Riccardo. Digital Geography, Unsupervised Classification in QGIS: Kmeans or Part Two. Available online: http://www.digital-geography.com/unsupervised-classification-in-qgis-kmeans-or-part-two/#.WT5ixbpFzIV (accessed on 13 August 2013).
- GDAL/OGR. 2017. Geospatial Data Abstraction Library. Available online: http://www.gdal.org/ (accessed on 10 March 2017).
- Adão, T.; Peres, E.; Pádua, L.; Hruska, J.; Sousa, J.J.; Morais, R. UAS-based hyperspectral sensing methodology for continuous monitoring and early detection of vineyard anomalies. In Proceedings of the UAS4ENVIRO—Small Unmanned Aerial Systems for Environmental Reasearch—5th Edition, Vila Real, Portugal, 28–30 June 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segmentation | Unsupervised Classification with Segmented Image and Multispectral Image as Inputs | Unsupervised Classification with Segmented Image and NDVI Image as Inputs | Unsupervised Classification with Segmented Image and RGB Image as Inputs |
|---|---|---|---|
 |  |  |  |
| (a) Segmentation: Thresholding = 0.65, minsize = 100, separated bands | |||
 |  |  |  |
| (b) Segmentation: Thresholding = 0.65, minsize = 100, joined bands | |||
 |  |  |  |
| (c) Segmentation: Thresholding = 0.95, minsize = 100, separated bands | |||
 |  |  |  |
| (d) Segmentation: Thresholding = 0.65, minsize = 10, joined bands | |||
 |  |  |  |
| (e) Segmentation: Thresholding = 0.95, minsize = 10, separated bands | |||
 |  |  |  |
| (f) Segmentation: Thresholding = 0.65, minsize = 200, separated bands | |||
| Procedure | Tool | Algorithm | Time (s) | |
|---|---|---|---|---|
| Experimental Procedure | Plugin | |||
| OBIA segmentation | GRASS GIS 7 | i.segment (default values) | 1837 | |
| OTB | Watershed segmentation | 319 | ||
| GRASS GIS 7 | i.segment (thresholding 0.05 until 0.65) | 2017 | ||
| OBIA classification—supervised classification | OTB | Compute second order statistics | 3 | |
| OTB | TrainImageClassifier (svm) | 14 | ||
| OTB | Image Classification | 8 | ||
| OBIA classification—unsupervised classification | OTB | Unsupervised kmeans image classification | 3 | |
| Fractal Analysis | GDAL | Raster Calculator | 8 | |
| GDAL | Polygonize | 69 | ||
| TOTAL (with unsupervised classification) | Segmentation with i.segment (default values) | 1917 | 2118 | |
| Segmentation with Watershed algorithm | 399 | |||
| Segmentation with thresholding | 2097 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duarte, L.; Silva, P.; Teodoro, A.C. Development of a QGIS Plugin to Obtain Parameters and Elements of Plantation Trees and Vineyards with Aerial Photographs. ISPRS Int. J. Geo-Inf. 2018, 7, 109. https://doi.org/10.3390/ijgi7030109
Duarte L, Silva P, Teodoro AC. Development of a QGIS Plugin to Obtain Parameters and Elements of Plantation Trees and Vineyards with Aerial Photographs. ISPRS International Journal of Geo-Information. 2018; 7(3):109. https://doi.org/10.3390/ijgi7030109
Chicago/Turabian StyleDuarte, Lia, Pedro Silva, and Ana Cláudia Teodoro. 2018. "Development of a QGIS Plugin to Obtain Parameters and Elements of Plantation Trees and Vineyards with Aerial Photographs" ISPRS International Journal of Geo-Information 7, no. 3: 109. https://doi.org/10.3390/ijgi7030109
APA StyleDuarte, L., Silva, P., & Teodoro, A. C. (2018). Development of a QGIS Plugin to Obtain Parameters and Elements of Plantation Trees and Vineyards with Aerial Photographs. ISPRS International Journal of Geo-Information, 7(3), 109. https://doi.org/10.3390/ijgi7030109