Bathymetric Photogrammetry to Update CHS Charts: Comparing Conventional 3D Manual and Automatic Approaches


Abstract
1. Introduction
2. Study Area and Datasets
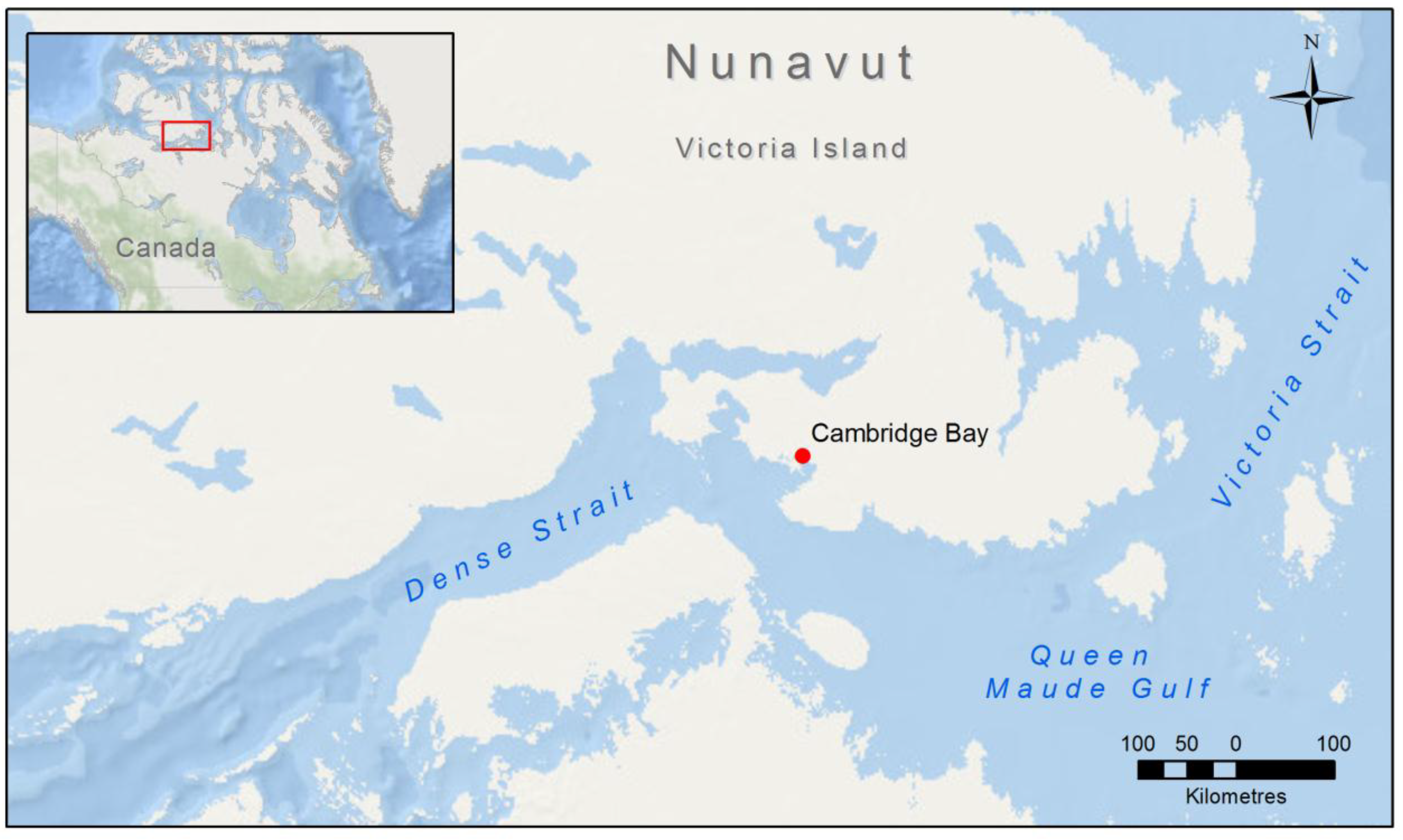
2.1. Study Area
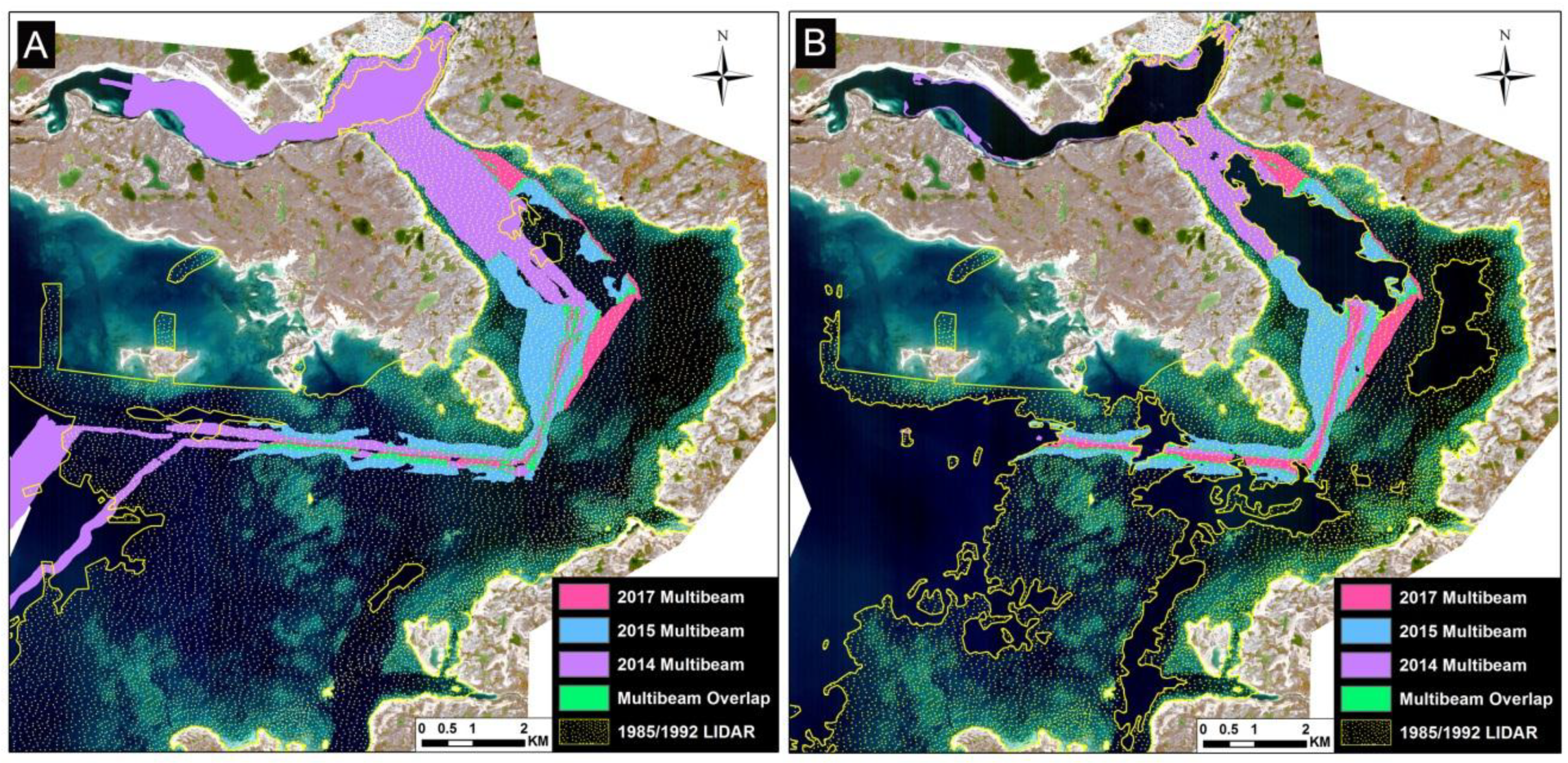
2.2. Survey Data
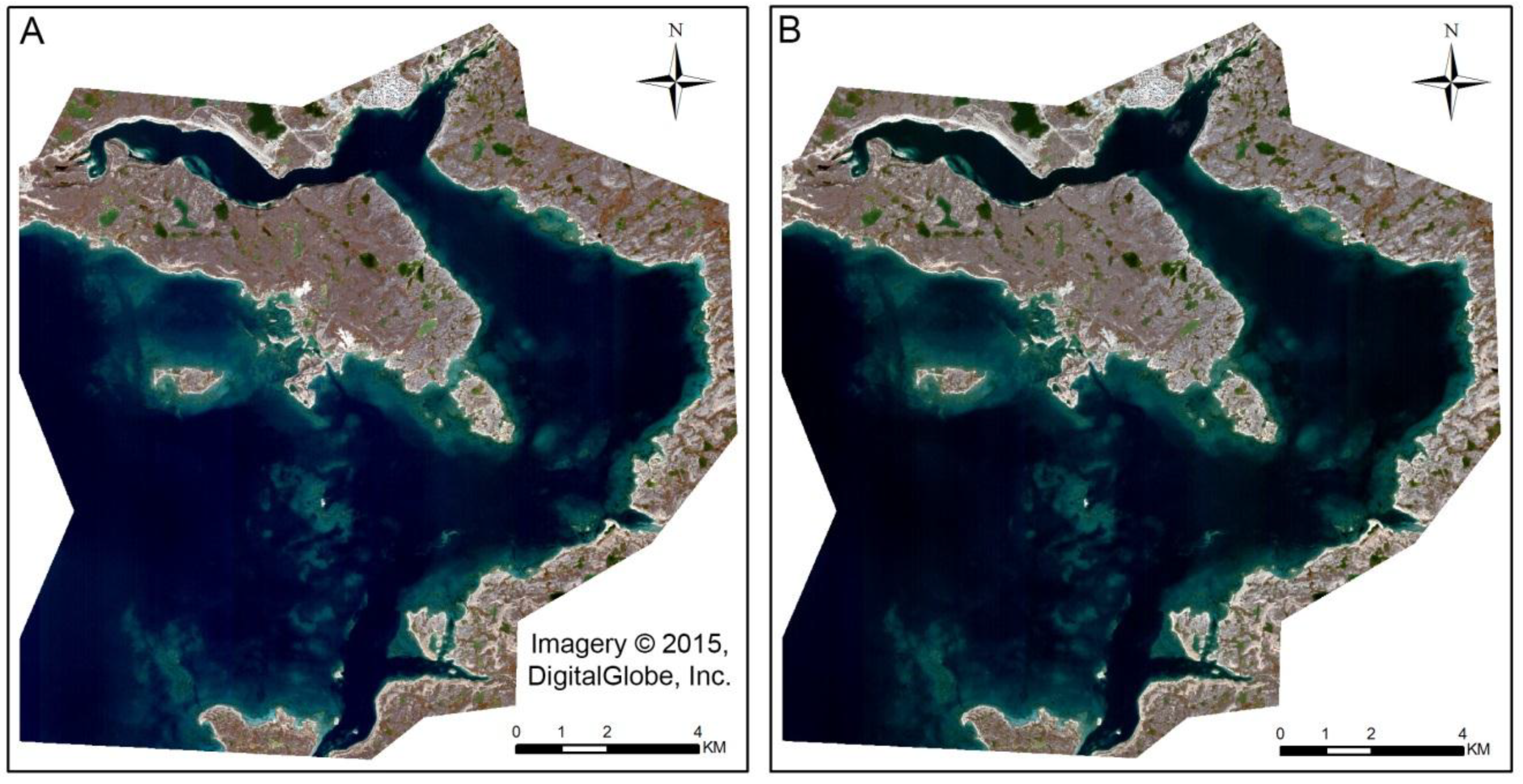
2.3. Satellite Imagery
3. Methods
3.1. Image Pre-Processing
3.2. Stereo Photogrammetric Methods
3.3. Vertical Correction
3.4. Accuracy Assessment
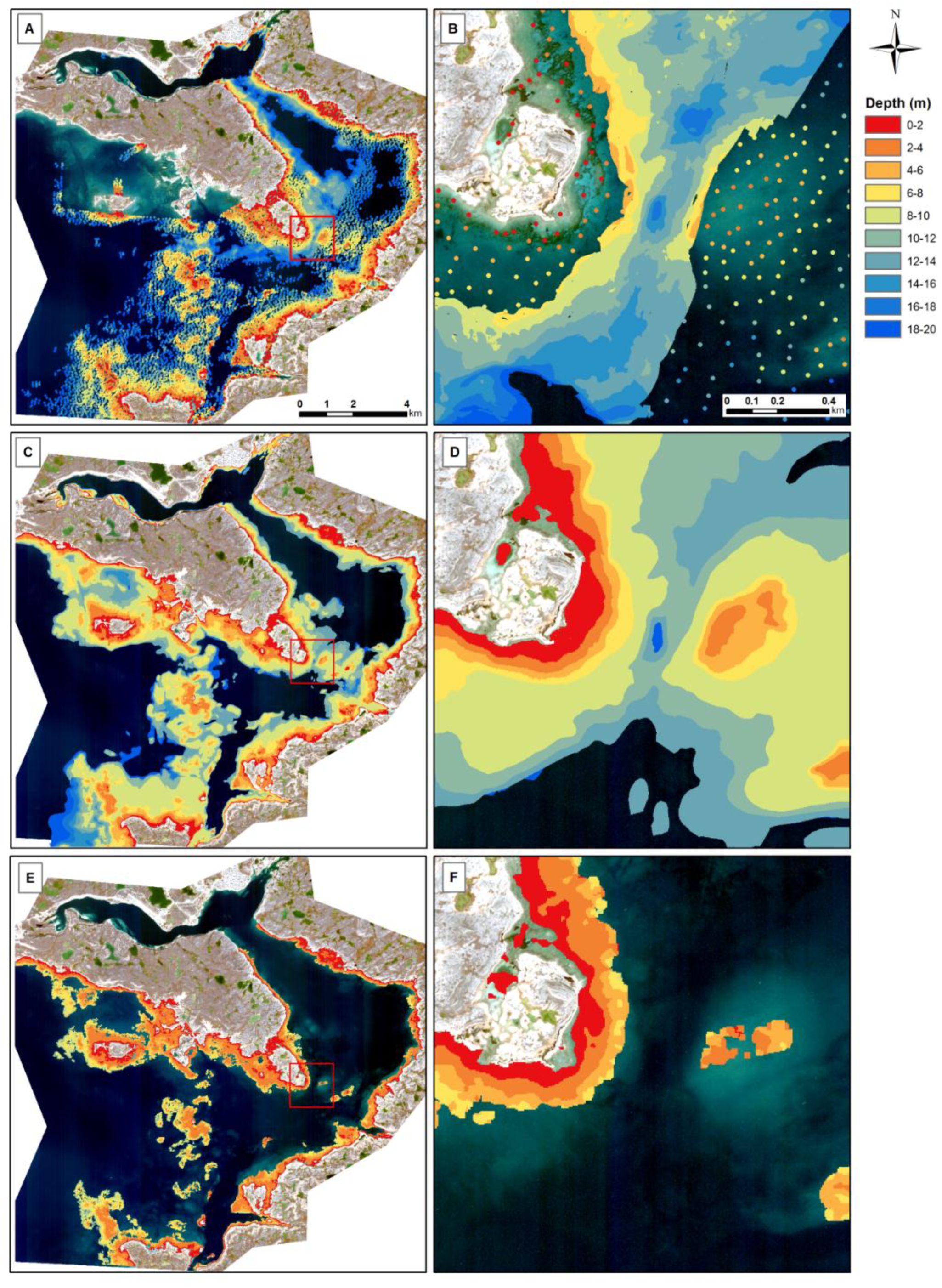
4. Results
5. Discussion
5.1. Survey Data Limitations
5.2. Stereo Approach Comparisons
5.3. International Standard Compatibility
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Department of Fisheries and Oceans (DFO). The Role of the Canadian Government in the Oceans Sector. 2008. Available online: http://www.dfo-mpo.gc.ca/oceans/publications/cg-gc/page02-eng.html (accessed on 22 June 2018).
- Chenier, R.; Faucher, M.A.; Ahola, R.; Jiao, X.; Tardif, L. Remote sensing approach for updating CHS charts. In Proceedings of the Canadian Hydrographic Conference, Halifax, NS, Canada, 16–17 May 2016. [Google Scholar]
- Polcyn, F.C.; Brown, W.L.; Sattinger, I.J. The Measurement of Water Depth by Remote Sensing Techniques; Report No. 8973-26-F; Willow Run Laboratories of the Institute of Science and Technology, the University of Michigan: Ann Arbor, MI, USA, 1970. [Google Scholar]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and LANDSAT data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Shallow-water bathymetry using combined LiDAR and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Knudby, A.; Ahmad, S.K.; Ilori, C. The potential for landsat based bathymetry in Canada. Can. J. Remote Sens. 2016, 367–378. [Google Scholar] [CrossRef]
- Kerr, J.M.; Purkis, S. An algorithm for optically-deriving water depth from multispectral imagery in coral reef landscapes in the absence of ground-truth data. Remote Sens. Environ. 2018, 210, 307–324. [Google Scholar] [CrossRef]
- Mavraeidopoulos, A.K.; Pallikaris, A.; Oikonomou, E. Satellite derived bathymetry (SDB) and safety of navigation. Int. Hydrogr. Rev. 2017, 7–19. Available online: https://journals.lib.unb.ca/index.php/ihr/article/download/26290/1882519043 (accessed on 25 July 2018).
- Dean, R.G.; Dalrymple, R.A. Water wave mechanics for engineers and scientists. Adv. Ser. Ocean Eng. 1991. [Google Scholar] [CrossRef]
- Alpers, W.; Hennings, I. A theory of the imaging mechanism of underwater bottom topography by real and synthetic aperture radar. J. Geophys. Res. 1984, 89, 10529–10546. [Google Scholar] [CrossRef]
- Pleskachevsky, A.; Lehner, S. Estimation of Underwater Topography Using Satellite High Resolution Synthetic Aperture Radar Data. 2011. Available online: https://www.researchgate.net/publication/225023003/download (accessed on 5 September 2018).
- Danilo, C.; Melgani, F. Wave period and coastal bathymetry using wave propagation on optical images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6307–6319. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Zheng, Q.; Pietrafesa, L.J.; Pichel, W.G.; Li, Z.; Li, X. Deep-water bathymetric features imaged by spaceborne SAR in the Gulf Stream region. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Mancini, S.; Olsen, R.C.; Abileah, R.; Lee, K.R. Automating nearshore bathymetry extraction from wave motion in satellite optical imagery. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 23–27 April 2012. [Google Scholar]
- Fujisada, H.; Urai, M.; Iwasaki, A. Technical methodology for ASTER global DEM. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3725–3736. [Google Scholar] [CrossRef]
- Hodul, M.; Bird, S.; Knudby, A.; Chenier, R. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Li, R.; Zhou, F.; Niu, X.; Di, K. Integration of Ikonos and QuickBird imagery for geopositioning accuracy analysis. Photogramm. Eng. Remote Sens. 2007, 73, 1067–1074. [Google Scholar]
- Li, R.; Niu, X.; Liu, C.; Wu, B.; Deshapnde, S. Impact of imaging geometry on 3D geopositioning accuracy of stereo Ikonos imagery. Photogramm. Eng. Remote Sens. 2009, 75, 1119–1125. [Google Scholar] [CrossRef]
- Jeong, J.; Kim, T. Analysis of dual-sensor stereo geometry and its positioning accuracy. Photogramm. Eng. Remote Sens. 2014, 80, 653–661. [Google Scholar] [CrossRef]
- Jeong, J.; Kim, T. Quantitative estimation and validation of the effects of the convergence, bisector elevation, and asymmetry angles on the positioning accuracies of satellite stereo pairs. Photogramm. Eng. Remote Sens. 2016, 82, 625–633. [Google Scholar] [CrossRef]
- Cain, J. Stereomodel Acquisition Geometry. Ph.D. Thesis, University of California, Berkley, CA, USA, 1989. [Google Scholar]
- Tong, X.; Liu, S.; Weng, Q. Bias-corrected rational polynomial coefficients for high accuracy geo-positioning of QuickBird stereo imagery. ISPRS J. Photogramm. Remote Sens. 2010, 65, 218–226. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Helava, U.V. Digital correlation in photogrammehic instruments. Photogrammetria 1978, 34, 19–41. [Google Scholar] [CrossRef]
- Bulatov, D.; Wernerus, P.; Heipke, C. Multi-view dense matching supported by triangular meshes. ISPRS J. Photogramm. Remote Sens. 2011, 66, 907–918. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Knapitsch, A.; Park, J.; Zhou, Q.; Koltun, V. Tanks and temples: Benchmarking large-scale scene reconstruction. ACM Trans. Graph. 2017. [Google Scholar] [CrossRef]
- Hirschmüller, H. Accurate and efficient stereo processing by semi-global matching and mutual information. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; pp. 807–814. [Google Scholar]
- Hirschmuller, H. Stereo processing by Semi-Global Matching and Mutual Information. IEEE Trans. Pattern. Anal. Mach. Intell. 2008, 30, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Pairaud, I.L.; Lyard, F.; Auclair, F.; Letellier, T.; Marsalaix, P. Dynamics of the semi-diurnal and quarter-diurnal internal tides in the Bay of Biscay. Part 1: Barotropic tides. Cont. Shelf Res. 2008, 28, 1294–1315. [Google Scholar] [CrossRef]
- Collins, A.K.; Hannah, C.G.; Greenberg, D. Validation of a high resolution modelling system for tides in the Canadian Arctic archipelago. Candian Technical Report of Hydrography and Ocean Sciences. 2011. Available online: http://www.dfo-mpo.gc.ca/Library/343683.pdf (accessed on 25 July 2018).
- Murase, T.; Tanaka, M.; Tani, T.; Mayashita, Y.; Ohkawa, N.; Ishiguro, S.; Suzuki, Y.; Kayanne, H.; Yamano, H. A photogrammetric correction procedure for light refraction effects at a two-medium boundary. Photogramm. Eng. Remote Sens. 2008, 74, 1129–1136. [Google Scholar] [CrossRef]
- Chénier, R.; Faucher, M.-A.; Ahola, R. Satellite-derived bathymetry for improving Canadian Hydrographic Service charts. ISPRS Int. J. Geo-Inf. 2018, 7, 306. [Google Scholar] [CrossRef]
- International Hydrographic Organization (IHO). S-57 Supplement No. 3—Supplementary Information for the Encoding of S-57 Edition 3.1 ENC Data; International Hydrographic Organization: Monaco, Monaco, 2017; Available online: https://www.iho.int/iho_pubs/standard/S-57Ed3.1/S-57_e3.1_Supp3_Jun14_EN.pdf (accessed on 5 June 2018).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Type | Date of Acquisition | CATZOC Classification | Number of Points (0–20 m) |
|---|---|---|---|
| Multibeam | 1 August to 10 September 2017 | A1 | 599,305 |
| 1 August to 30 September 2015 | A1 | 1,265,263 | |
| 6 August to 19 September 2014 | A1 | 1,284,582 | |
| LiDAR | 1–31 August 1992 | C | 1193 |
| 1–31 August 1985 | B | 8953 | |
| Total | 3,159,297 | ||
| Water Depth (m) | 2017 Multibeam | 2015 Multibeam | 2014 Multibeam | 1992 LiDAR | 1985 LiDAR | Total |
|---|---|---|---|---|---|---|
| 0 to 2 | 0 | 0 | 938 | 259 | 733 | 1930 |
| 2 to 4 | 0 | 440 | 10,163 | 245 | 927 | 11,775 |
| 4 to 6 | 1671 | 17,753 | 46,308 | 200 | 1060 | 66,992 |
| 6 to 8 | 15,052 | 57,957 | 82,574 | 134 | 1052 | 156,769 |
| 8 to 10 | 23,380 | 120,681 | 104,928 | 124 | 1105 | 250,218 |
| 10 to 12 | 67,570 | 199,580 | 166,659 | 48 | 724 | 434,581 |
| 12 to 14 | 150,157 | 270,770 | 211,433 | 54 | 891 | 633,305 |
| 14 to 16 | 137,498 | 189,464 | 202,001 | 33 | 816 | 529,812 |
| 16 to 18 | 140,050 | 228,040 | 243,404 | 42 | 813 | 612,349 |
| 18 to 20 | 63,927 | 180,578 | 216,174 | 54 | 825 | 461,558 |
| Total | 599,305 | 1,265,263 | 1,284,582 | 1193 | 8946 | 3,159,289 |
| Image Geometry | Forward Image | Backward Image | Stereo Geometry | Stereo-Pair |
|---|---|---|---|---|
| In-Track View | 24° | −8° | Convergence | 36.3° |
| Cross Track View | 14.7° | 14.1° | BIE | 71.2° |
| Off Nadir View | 28° | 16.2° | Asymmetrical | 9.5° |
| Automatic | Manual | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Depth Range | 90% Conf. Level | RMSE (m) | Bias (m) | Min Error (m) | Max Error (m) | 90% Conf. Level | RMSE (m) | Bias (m) | Min Error (m) | Max Error (m) |
| 0–10 m | 1.84 | 1.46 | 0.84 | 0.00 | 12.51 | 1.70 | 1.17 | −0.47 | 0.00 | 6.80 |
| 0–2 m | 3.13 | 1.84 | 0.00 | 12.51 | 1.09 | 0.61 | 0.00 | 3.20 | ||
| 2–4 m | 2.07 | 1.61 | 0.00 | 5.68 | 1.12 | −0.16 | 0.00 | 3.85 | ||
| 4–6 m | 1.40 | 0.88 | 0.00 | 6.13 | 1.28 | −0.52 | 0.00 | 4.10 | ||
| 6–8 m | 1.12 | 0.53 | 0.00 | 8.50 | 1.57 | −0.41 | 0.00 | 4.80 | ||
| 8–10 m | 1.14 | 0.23 | 0.00 | 4.78 | 1.88 | −0.21 | 0.00 | 6.80 | ||
| 10–12 m | 1.65 | 1.06 | 0.00 | 3.70 | 0.90 | 0.18 | 0.00 | 4.57 | ||
| 2015–2014 | 2017–2014 | 2017–2015 | Lidar-MB | |
|---|---|---|---|---|
| Count | 118,195 | 152,460 | 99,243 | 1758 |
| RMSE | 0.20 | 0.67 | 0.29 | 1.30 |
| Bias | −0.18 | −0.46 | −0.27 | 0.60 |
| CATZOC Type | Horizontal Accuracy | Vertical Accuracies for Depth Ranges | Seafloor Coverage | |
|---|---|---|---|---|
| Depth Range (m) | Accuracy | |||
| A1 | 5 m | 0–10 | ±0.6 | Full coverage |
| 10–30 | ±0.8 | |||
| A2 | 20 m | 0–10 | ±1.2 | Full coverage |
| 10–30 | ±1.6 | |||
| B | 50 m | 0–10 | ±1.2 | Full coverage not achieved, hazards to surface navigation are not expected but may exist |
| 10–30 | ±1.6 | |||
| C | 500 m | 0–10 | ±2.5 | Full coverage not achieved, depth anomalies may be expected |
| 10–30 | ±3.5 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chénier, R.; Faucher, M.-A.; Ahola, R.; Shelat, Y.; Sagram, M. Bathymetric Photogrammetry to Update CHS Charts: Comparing Conventional 3D Manual and Automatic Approaches. ISPRS Int. J. Geo-Inf. 2018, 7, 395. https://doi.org/10.3390/ijgi7100395
Chénier R, Faucher M-A, Ahola R, Shelat Y, Sagram M. Bathymetric Photogrammetry to Update CHS Charts: Comparing Conventional 3D Manual and Automatic Approaches. ISPRS International Journal of Geo-Information. 2018; 7(10):395. https://doi.org/10.3390/ijgi7100395
Chicago/Turabian StyleChénier, René, Marc-André Faucher, Ryan Ahola, Yask Shelat, and Mesha Sagram. 2018. "Bathymetric Photogrammetry to Update CHS Charts: Comparing Conventional 3D Manual and Automatic Approaches" ISPRS International Journal of Geo-Information 7, no. 10: 395. https://doi.org/10.3390/ijgi7100395
APA StyleChénier, R., Faucher, M.-A., Ahola, R., Shelat, Y., & Sagram, M. (2018). Bathymetric Photogrammetry to Update CHS Charts: Comparing Conventional 3D Manual and Automatic Approaches. ISPRS International Journal of Geo-Information, 7(10), 395. https://doi.org/10.3390/ijgi7100395