1. Introduction
In recent years, consumption and logistics patterns have changed with the development of economies and the gradual increases in national incomes. Furthermore, distribution channels have changed from direct distribution to the use of distribution centers (DCs). DCs can ship goods both upstream and downstream. The use of intelligent transportation fleet management technology to control the transit of goods is more efficient than traditional methods, and logistics companies receive higher economic benefits. Therefore, commercial vehicle operation (CVO) has been a popular application of intelligent transportation systems (ITS). The components of CVO include fleet administration, freight administration, electronic clearance, commercial vehicle administrative processes, international border crossing clearance, weigh-in-motion, roadside CVO safety, on-board safety monitoring, CVO fleet maintenance, hazardous material planning and incident response, freight in-transit monitoring, and freight terminal management.
Location determination of a vehicle by an on-board unit (OBU) is important for CVO. Precise location information can be used to support fleet administration, freight administration, freight in-transit monitoring,
etc. For example, DCs can monitor the locations and movements of OBUs and provide the status of freight to users and receivers. The Global Positioning System (GPS) is the most popular location determination method for OBUs [
1]. However, because of interference with GPS signals in cities, location errors may be generated from GPS. Therefore, this paper considers mobile positioning techniques to obtain location information when the signals of GPS satellites are weak. Various techniques have been proposed to analyze the signals from radio frequency identification (RFID) [
2], Bluetooth [
3], wireless local area networks (WLAN) [
4,
5,
6], wireless sensor networks (WSN) [
7,
8], and cellular networks [
9] for location determination [
10]. However, the transmission ranges of RFID, Bluetooth, and WLAN are short, and they may be not suitable for CVO. Therefore, this study proposes a high-efficiency mobile positioning method to analyze the cellular network signals of CVO data. The method can be combined with cloud computing techniques to quickly determine the location of an OBU. Furthermore, a CVO system is proposed and implemented in this study, including OBUs and a CVO server.
The remainder of the paper is as follows.
Section 2 presents and discusses the various techniques that exploit the cellular network for location determination. A high-efficiency mobile positioning method based on CVO data is proposed and illustrated in
Section 3.
Section 4 proposes analytical models to analyze the feasibility of the proposed mobile positioning method with various outlier filtering criteria.
Section 5 describes a CVO system implementation and analyzes practical records to evaluate the proposed method. Finally,
Section 6 discusses our conclusions and proposed future work.
2. Cellular-Based Positioning Methods
The 3rd Generation Partnership Project (3GPP) defined three classes of cellular-based positioning methods: the assisted global position system (A-GPS), mobile scan report (MSR)-based location methods, and database lookup methods [
9].
2.1. Assisted GPS
A-GPS is designed to transfer almanac data from an assisted-positioning server to a mobile device through a network connection [
11,
12]. This method requires less time than traditional GPS method, approximately thirty seconds, for searching for satellites and determining location.
2.2. MSR-Based Location Methods
The MSRs, which include received signal strength indication (RSSI), round-trip delay (RTD), and relative delay (RD), are analyzed for location determination. MSR-based location methods can be classified into three categories: angle of arrival (AoA) [
13,
14,
15], time of arrival (ToA) [
13,
14,
16], and time difference of arrival (TDoA) [
9,
10,
13]. This approach requires higher computation power than other methods [
12,
17,
18,
19].
2.3. Database Lookup Methods
Database lookup methods are used to determine the location of a mobile device quickly through static database queries. These methods can be classified into three categories: a cell-ID-based method [
19], a handover-based method [
20,
21,
22], and a fingerprint positioning method [
23,
24,
25,
26,
27,
28]. However, the lengths of cells and handoff zones are approximately 2 km and 200 m, respectively, and the location error depends on the cell size [
12,
19,
29]. Although precise location estimation can be obtained by the fingerprint positioning method, higher computation power and an establishment fee are required [
30].
To resolve these disadvantages, this study proposes a high-efficiency mobile positioning method based on the database lookup method to determine the location of mobile device quickly. Additionally, this method considers the RSSI of the connected cell to increase the accuracy of the estimated location.
3. High-Efficiency Mobile Positioning Method
A high-efficiency mobile positioning method is proposed to analyze and determine the location of each cell-RSSI pair from CVO data. The following subsections present two stages: (1) a pre-deployment stage and (2) a runtime stage.
3.1. Pre-Deployment Stage
In this stage, a mobile positioning algorithm is proposed to retrieve the location information and cellular network signals (
i.e., cell ID and RSSI) of historical data from GPS-equipped commercial vehicles and to estimate location for each cell-RSSI pair. For the computation requirements of the voluminous CVO data, the MapReduce programming model [
31] and HIVE [
32] are assumed to be built into cloud computing environments for quick location determination.
3.1.1. Input Data
Input data are CVO data. Each record of CVO data includes the longitude Hive and latitude of an OBU, the ID of the current connected cell, and the RSSI of the connected cell. Each OBU can periodically send CVO data (
i.e., longitude and latitude of the OBU, the ID of the current connected cell, and the RSSI of the connected cell) to CVO servers every 30 s. The RSSI and cell ID are paired and called the cell-RSSI pair. For example, the cell ID is presented as 10721_47366 when location area code (LAC) is 10721 and service area code (SAC) is 47366. The cell-RSSI pair is presented as 10721_47366_21 when the cell ID is 10721_47366 and the RSSI is −21 dBm [
33].
The notations of this study are summarized below:
There are n cells in CVO data, and the RSSI range of each cell is between 0 and m dBm. Therefore, there are n × m cell-RSSI pairs, and all cells have the same RSSI range.
The number of records of the i-th cell-RSSI pair is defined as ri.
The longitude of the j-th record of the i-th cell-RSSI pair is defined as xi,j, and the latitude of the j-th record of the i-th cell-RSSI is defined as yi,j.
The mean of xi,j is defined as µx,i, and the mean of yi,j is defined as µy,i.
The standard deviation of xi,j is defined as σx,i, and the standard deviation of yi,j is defined as σy,i.
After outlier filtering, the number of records of the i-th cell-RSSI pair is defined as ri′.
After outlier filtering, the longitude of the j-th record of the i-th cell-RSSI pair is defined as xi,j′, and the latitude of the j-th record of the i-th cell-RSSI is defined as yi,j′.
The mean of xi,j′ is defined as µx,i′, and the mean of yi,j′ is defined as µy,i′.
The longitude of the
i-th cell-RSSI pair
xi is assumed to be normally distributed with mean
µx,i and standard deviation
σx,i. The probability density function (PDF) of its normal distribution is defined as
[
33,
34].
The latitude of the
i-th cell-RSSI pair
yi is assumed to be normally distributed with mean
µy,i and standard deviation
σy,i. The PDF of its normal distribution is defined as
[
33,
34].
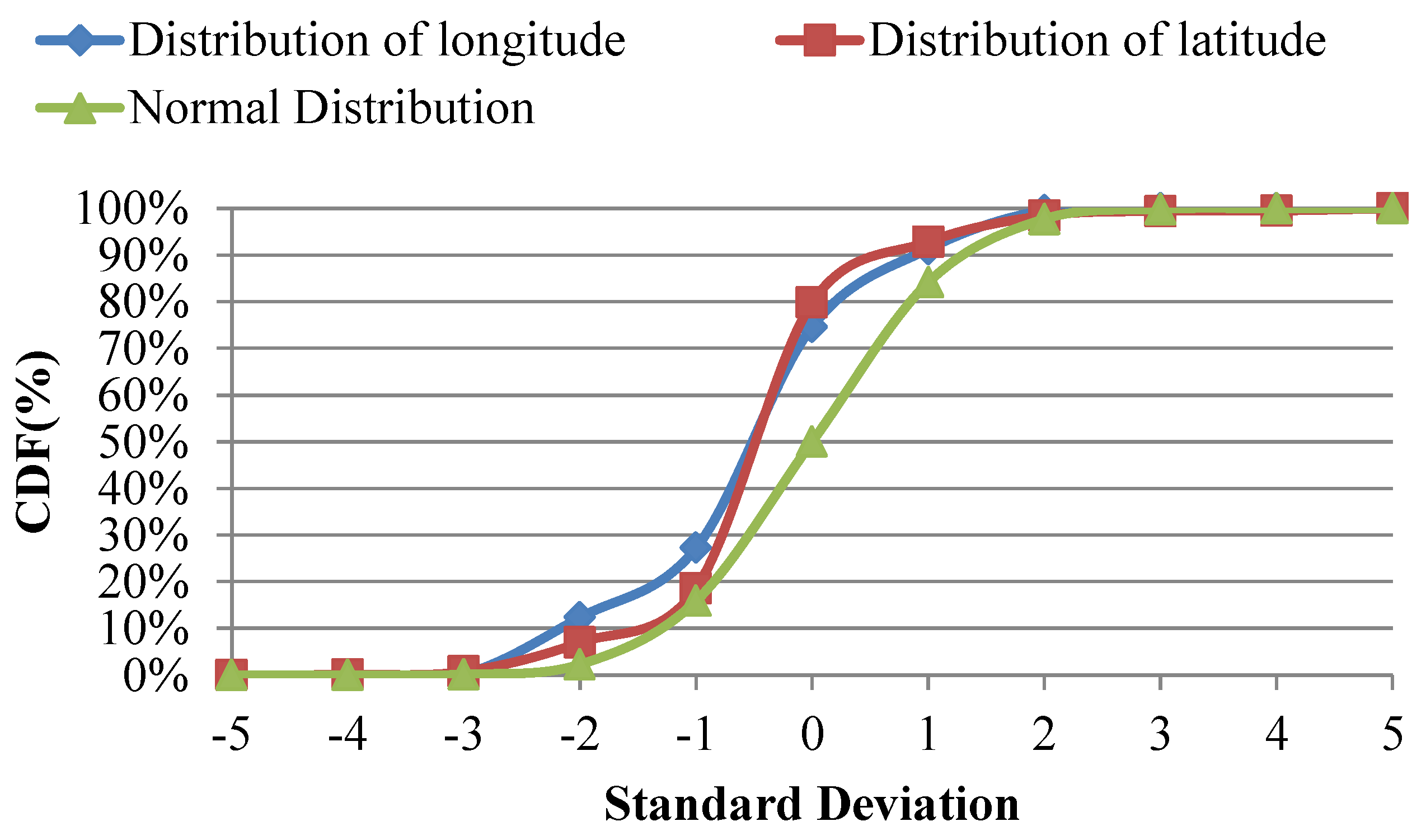
A study of cell-RSSI pair 10721_47366_21 helps to evaluate the assumptions of longitude and latitude distributions. The historical location data of this cell-RSSI pair were collected by the CVO system of Chunghwa Telecom from November 2013 to January 2014. The cumulative distribution functions (CDFs) of longitudes and latitudes based on 13,231 historical records were calculated and are illustrated in
Figure 1. The chi-square goodness of fit test [
26,
35,
36] is used to evaluate the distributions of practical data and normal distribution. Chi-square tests of these assumptions showed that
when
for the longitude distribution and
when
for the latitude distribution. No significant difference was observed, so the distributions of longitude and latitude were similar to normal distributions.
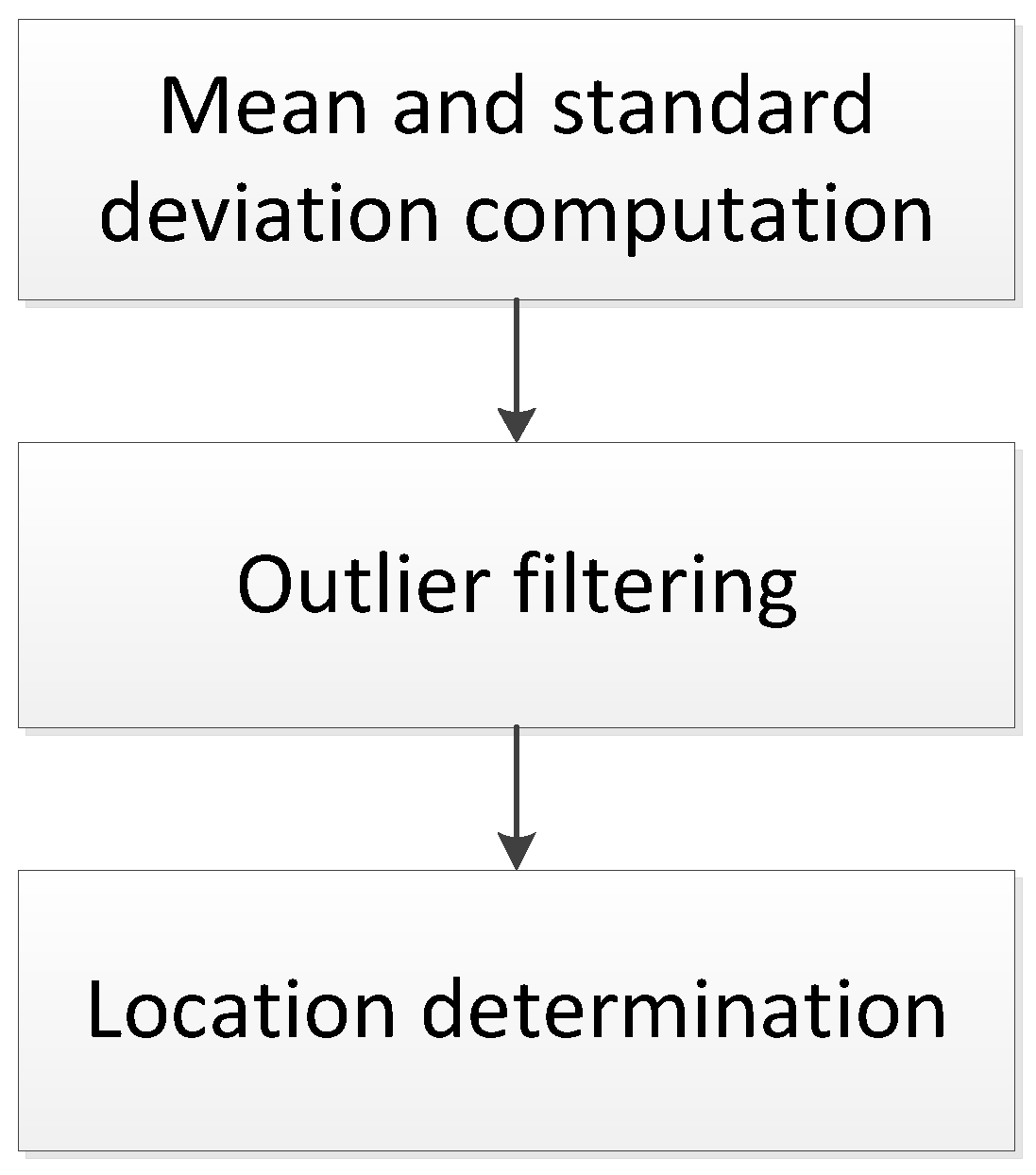
3.1.2. Process
Three steps comprise the mobile positioning method, as follows: (a) computation of the mean and standard deviation; (b) outlier filtering; and (c) location determination (see
Figure 2).
Mean and Standard Deviation Computation
For computation of the center, this study uses Equations (1) and (2) to calculate the means and standard deviations of longitudes and uses Equations (3) and (4) to calculate the means and standard deviations of latitudes, respectively:
Outlier Filtering
This step performs an outlier filtering mechanism to clean historical CVO data to determine location information precisely. The mechanism uses a threshold t that is defined as an outlier filtering criterion. The value of t can be set according to standard deviations σx,i and σy,i. The longitude of record xi,j will be filtered out when it is smaller than µx,i − t or larger than µx,i + t. Latitude records yi,j can be filtered with the same threshold t.
Location Determination
After outlier filtering, the means of the longitude and latitude of each record are calculated with Equations (5) and (6), respectively. This method determines the longitude and latitude of the
i-th cell-RSSI pair as
µx,i′ and
µy,i′:
In these steps, the means and standard deviations can be calculated using cloud computing (e.g., the MapReduce programming model). The key is the cell-RSSI pair, and the values are longitudes and latitudes. The MapReduce programming model can be implemented for center computation.
3.1.3. Output Data
The location of each cell-RSSI pair is the output of the mobile positioning algorithm. This information can be calculated in the pre-deployment stage and stored in a cloud computing database for the runtime stage. The HBase technique [
31] is used to implement this cloud computing database, and the HIVE technique [
32] is used to perform the operations of cloud computing database.
3.2. Runtime Stage
In this stage, the ID of the connected cell and RSSI of the OBU can be retrieved by the CVO server when GPS is unavailable. The cell-RSSI pair obtained with the cell ID and RSSI is then used to query the pre-deployment cloud database for real-time location determination.
4. Analytical Models with Different Outlier Filtering Criteria
This section proposes an analytical model and presents numerical results to analyze the feasibility of the proposed mobile positioning method with different outlier filtering criteria.
4.1. Analytical Models
This section proposes models to analyze the relationships of location error and availability to different outlier filtering thresholds t.
4.1.1. Location Error
The locations of the same cell-RSSI pair are assumed to be normally distributed, and the expected ranges of the longitude and latitude of the
i-th cell-RSSI pair are defined as
dx,i and
dy,i (see Equations (7) and (8)). The location errors may be generated in accordance with these ranges:
4.1.2. Availability
The locations of the same cell-RSSI pair are assumed to be normally distributed, and the availability of the
i-th cell-RSSI pair is defined as
px,i and
py,i (see Equations (9) and (10)). The function
g(
z) in Equations (9) and (10) is a Gaussian error function, which can be expressed as the Taylor series [
37]
s [
33]:
4.2. Numerical Analyses
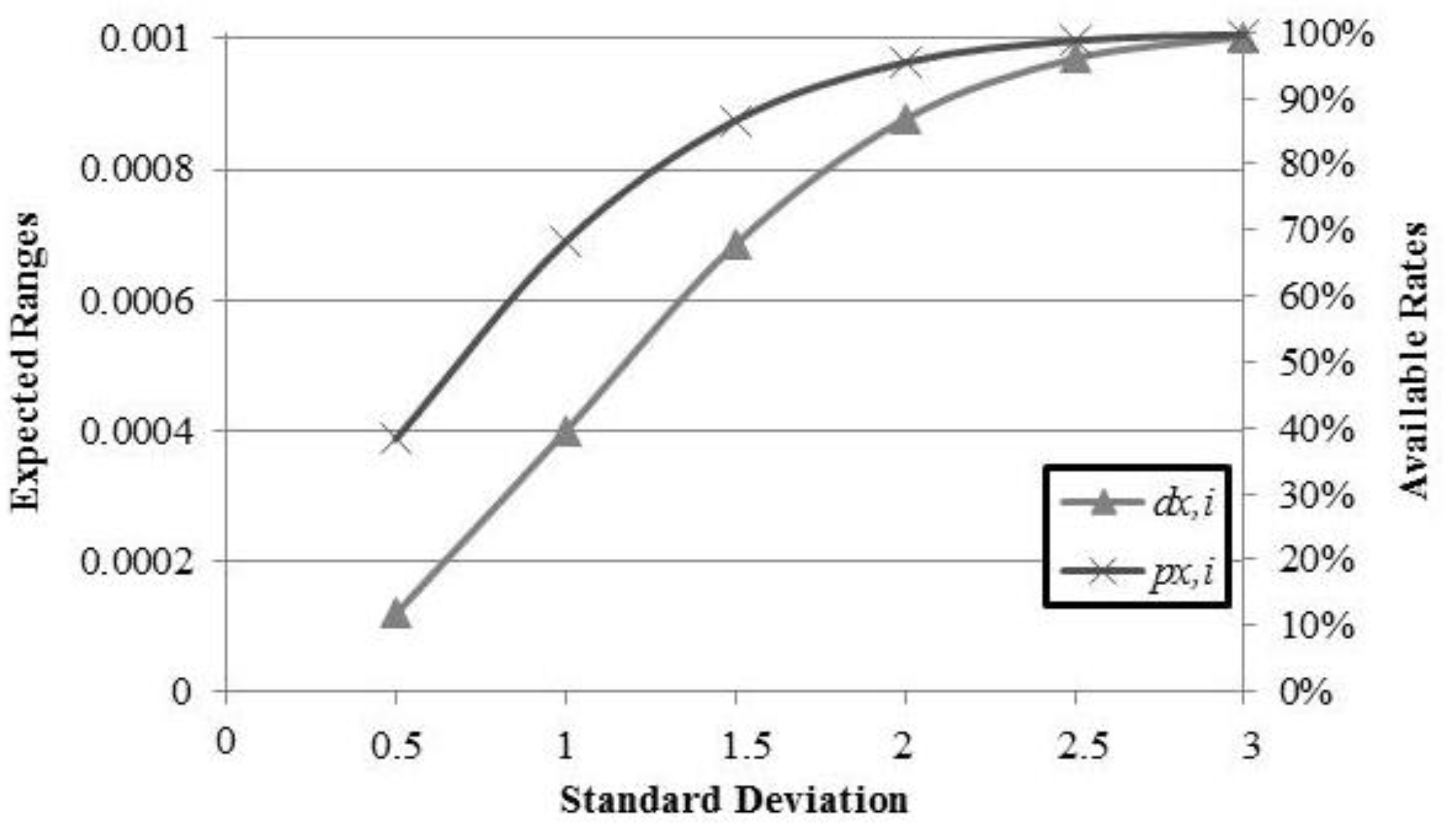
To demonstrate the proposed analytical model, the following parameters were adopted to estimate the expected ranges of the longitude and latitude of the
i-th cell-RSSI pair:
µx,i = 120.3259728,
µy,i = 22.56716916,
σx,i = 0.001271737,
σy,i = 0.000940652.
Figure 3 shows the expected ranges of longitude with different outlier filtering thresholds
t. The expected range is approximately 0.001003427 (
i.e., 103.03 m) when
t = 3 ×
σx,i (
i.e.,
t = 0.003815211). Moreover, the expected range is
(
i.e., 104.19 m) when
t = ∞. Therefore, the improvement of location determination is 1.16 m after outlier filtering with
t = 3 ×
σx,i. However, the availability
px,i decreases when the outlier filtering threshold
t is decreased. Therefore, there is a trade-off between the location error and availability.
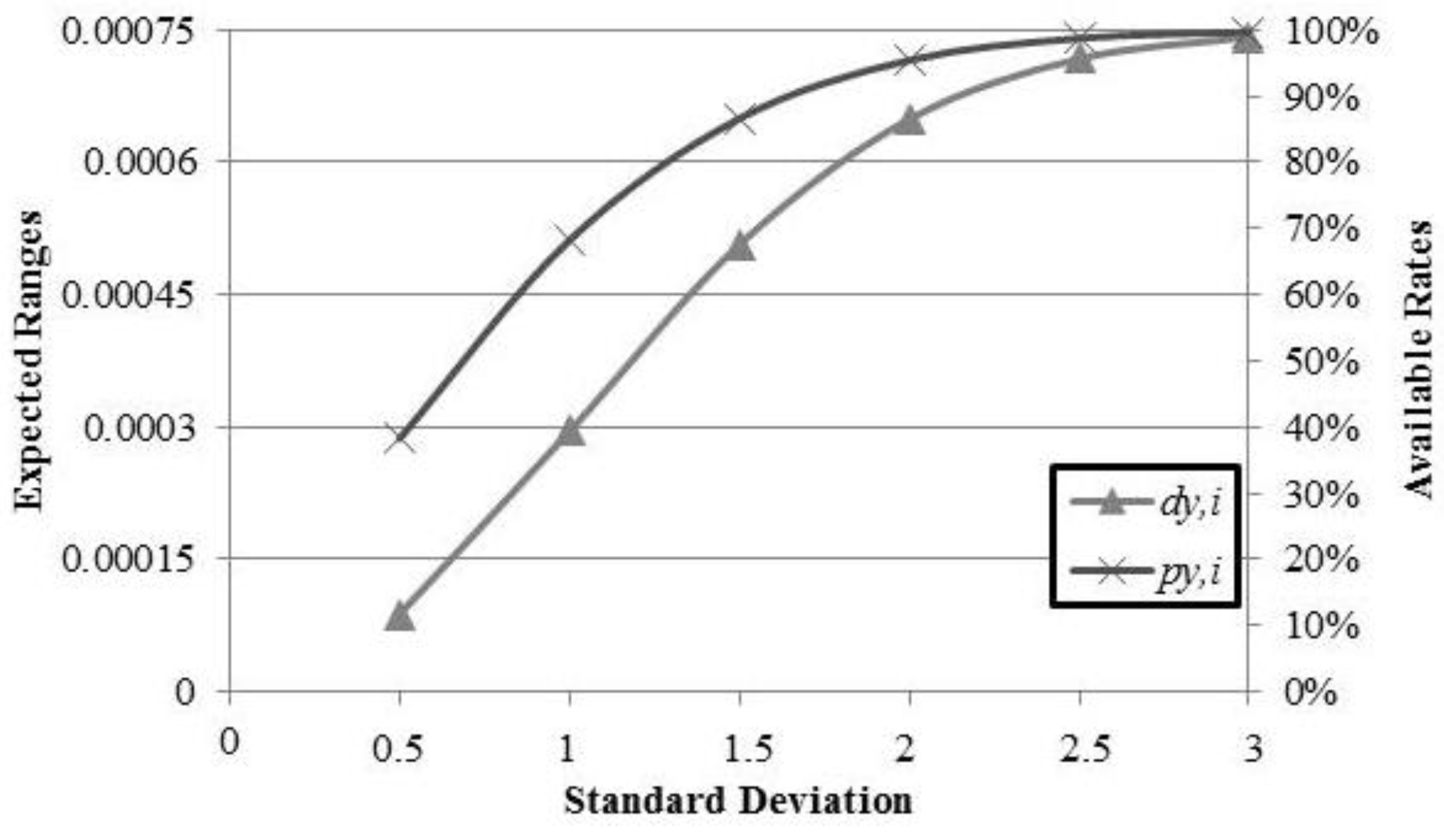
Figure 4 shows the expected ranges of latitude with different outlier filtering thresholds
t. The expected range is approximately 0.000742194 (
i.e., 82.53 m) when
t = 3 ×
σy,i (
i.e.,
t = 0.002821957), and
(
i.e., 83.46 m) when
t = ∞. Therefore, latitude location determination improves to 0.97 m after outlier filtering with
t = 3 ×
σy,i.
5. Implementation and Evaluation of a Commercial Vehicle Operation System
In this section, the architecture of a CVO system is proposed and implemented, and the experimental practical results from the CVO system are compared with different location determination methods to evaluate the proposed mobile positioning method [
33].
5.1. CVO System
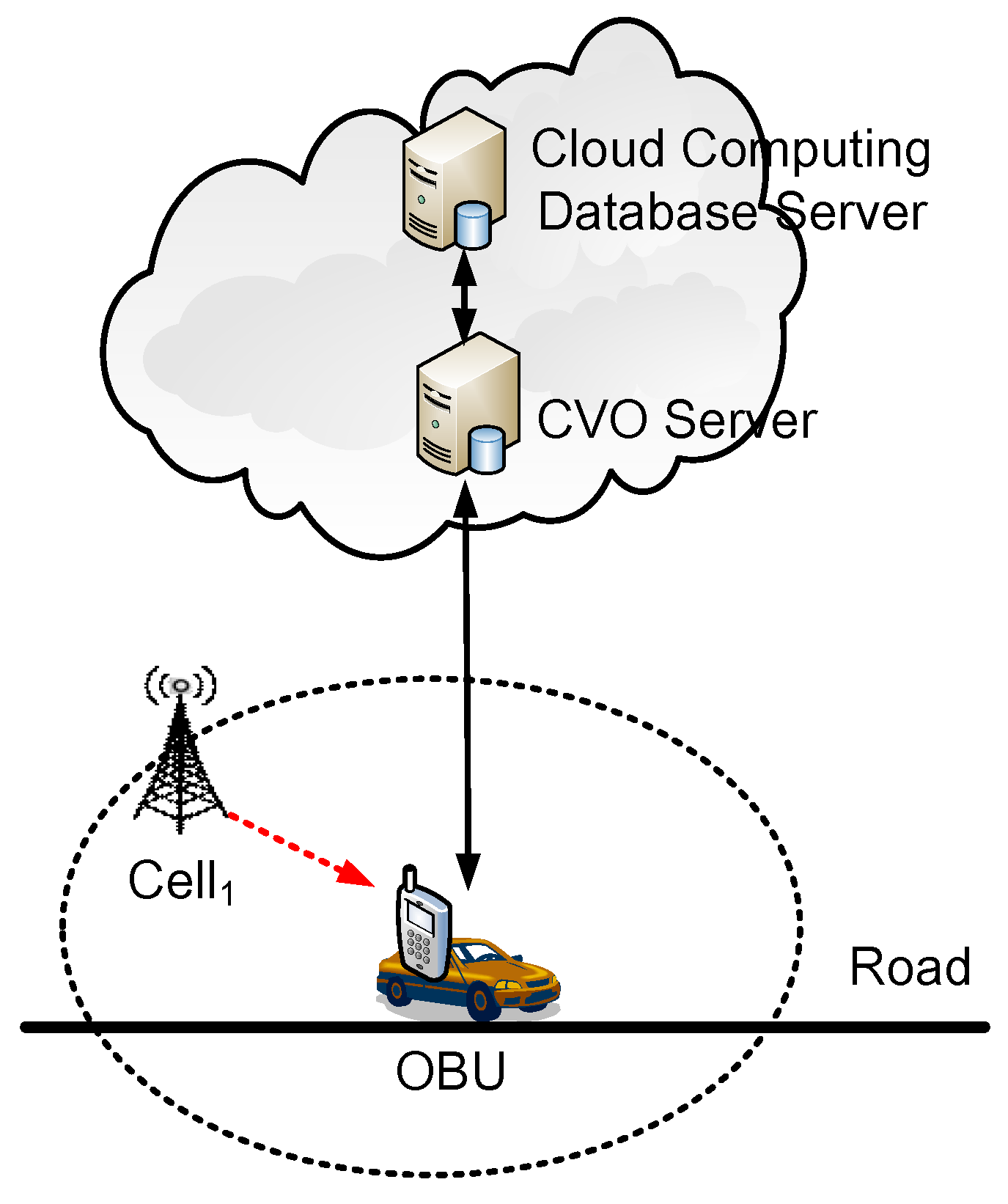
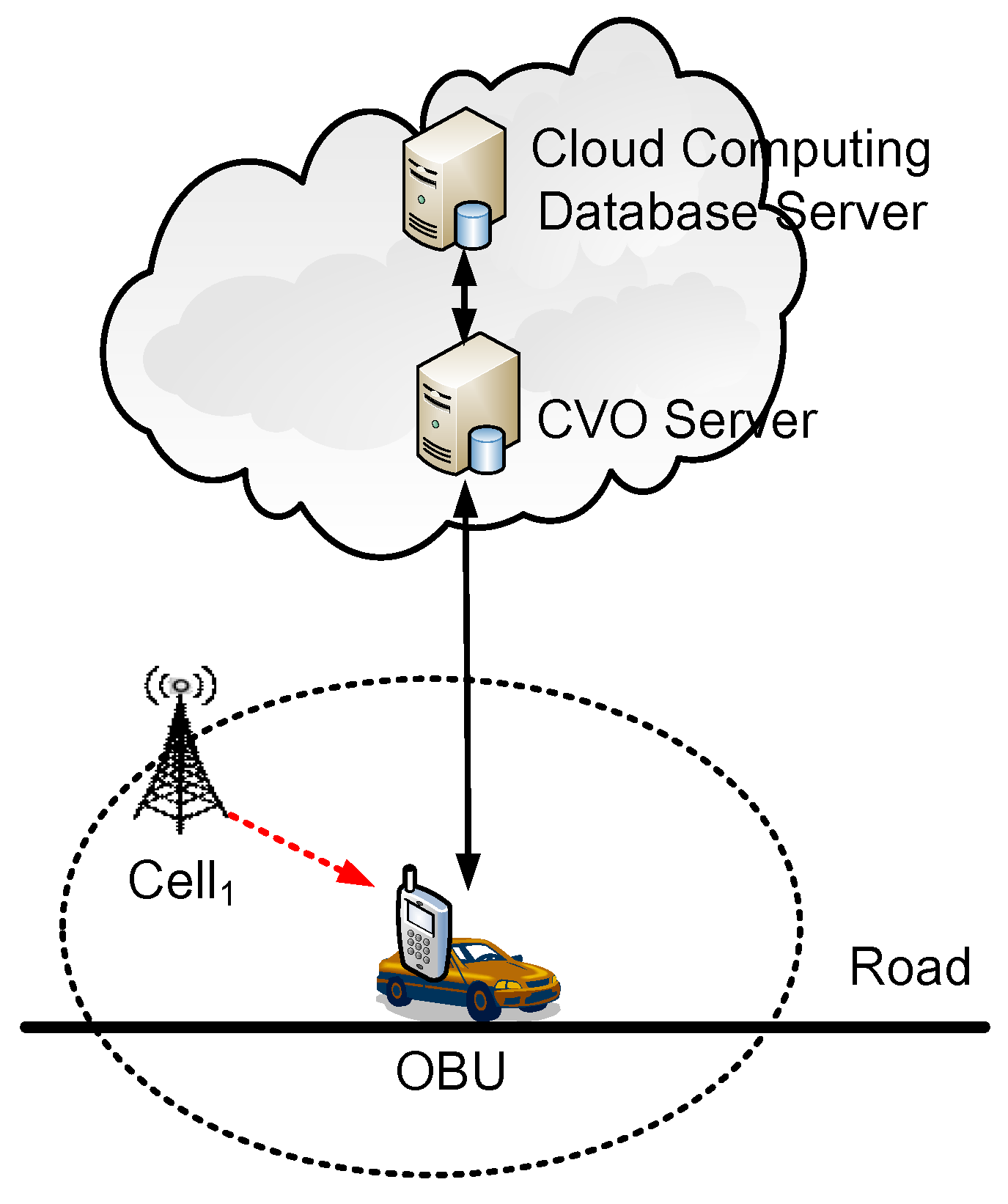
This subsection proposes a CVO system composed of OBUs, a CVO server, and a cloud computing database server (shown in
Figure 5).
A GPS receiver and a cellular network module can be equipped in each OBU for periodically transmitting location information (
i.e., longitude and latitude) determined from GPS and cellular network signals (
i.e., the ID and RSSI of the connected cell) to the CVO server. When GPS is unavailable, the OBU sends only cellular network signals, which are presented as cell-RSSI pairs. The CVO server can perform the proposed mobile positioning method using the cell-RSSI pair as a key and querying the pre-deployment cloud computing database based on Hadoop [
31], MapReduce [
31], and Hive [
32] techniques. The corresponding location of cell-RSSI pair can then be retrieved for determining the location of the OBU.
5.2. Experimental Results and Discussions
This subsection presents a case study and analyzes three months of CVO data to evaluate the proposed mobile positioning method. From November 2013 to January 2014, 67 OBUs were driven in experimental environments and 18,508 different cells were detected and connected. These OBUs obtained 6,571,550 CVO records and transmitted them to the CVO server for analyses of location information and cellular network signals.
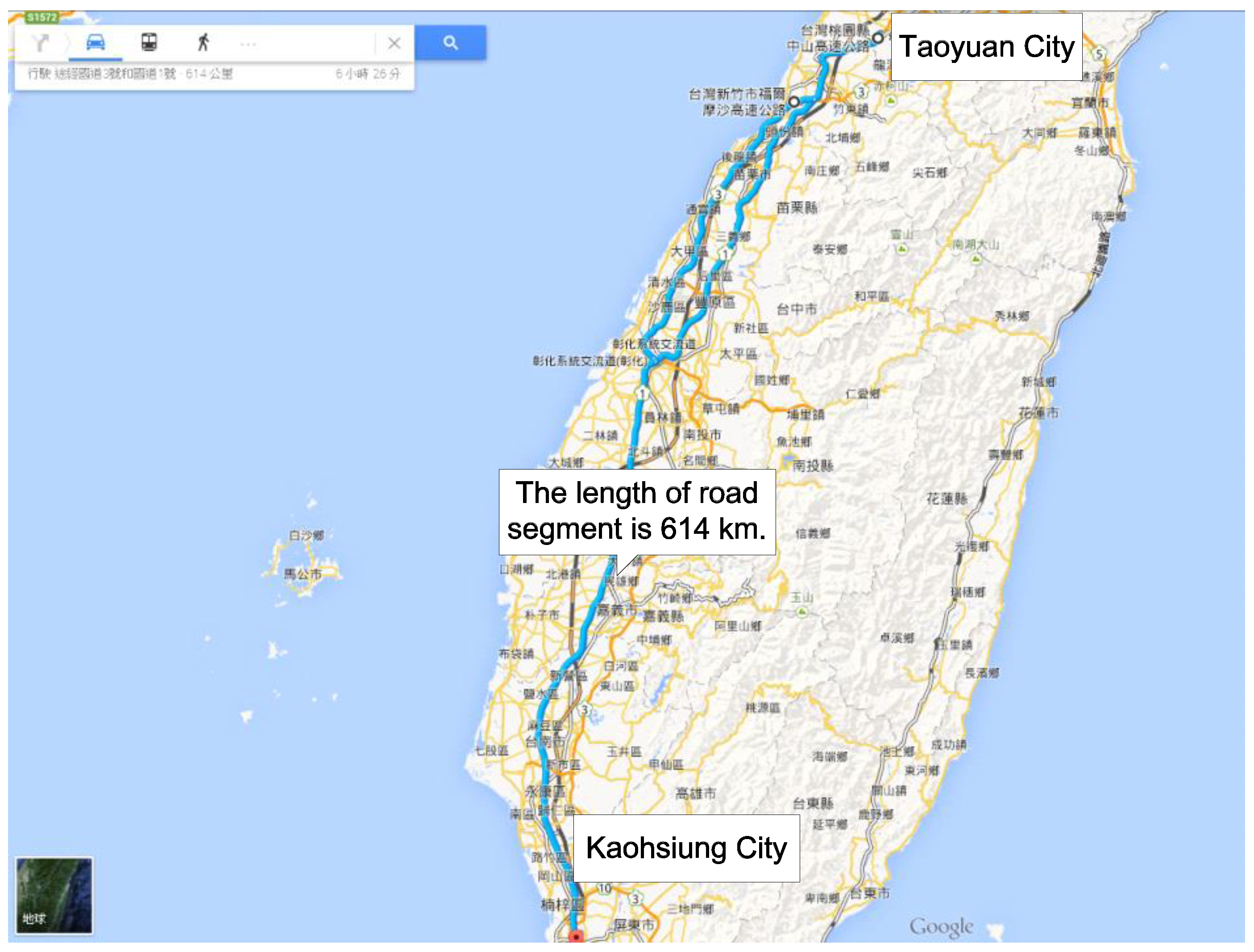
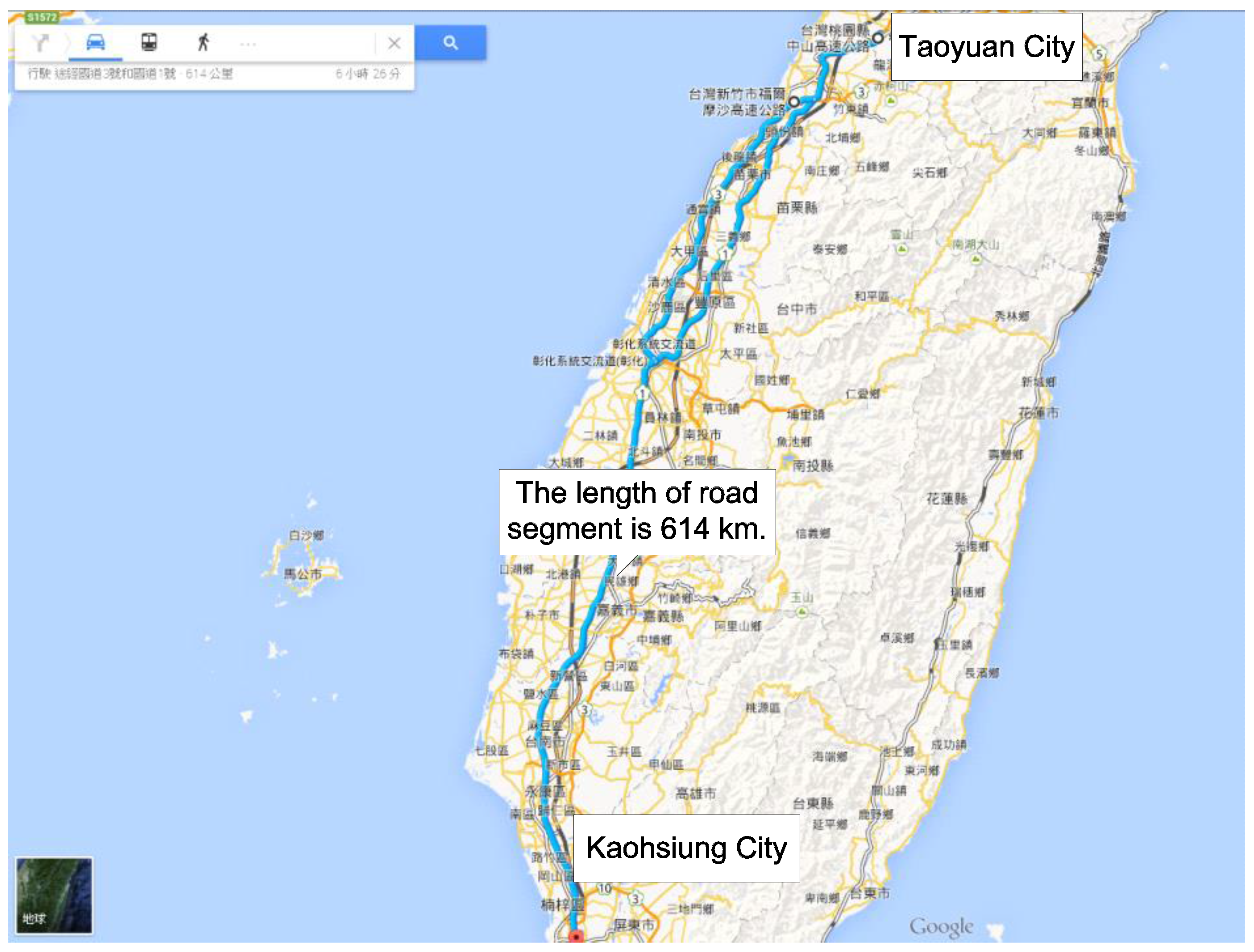
5.2.1. Case Study
An OBU was selected on 23 November 2013 as a case study to present the results of the proposed mobile positioning method. The experiments were conducted on a highway segment 614 km long between Kaohsiung and Taoyuan in Taiwan (shown in
Figure 6).
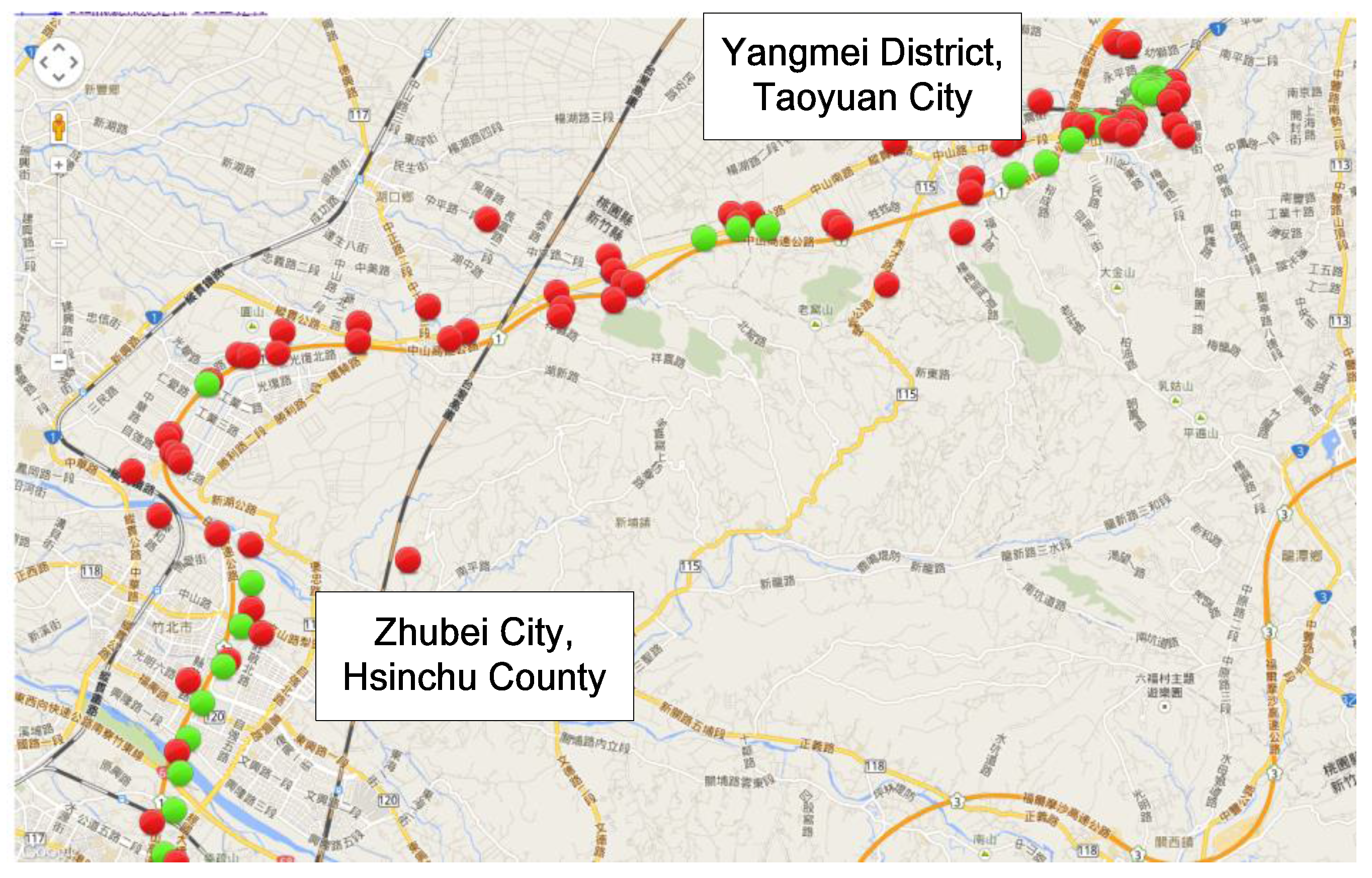
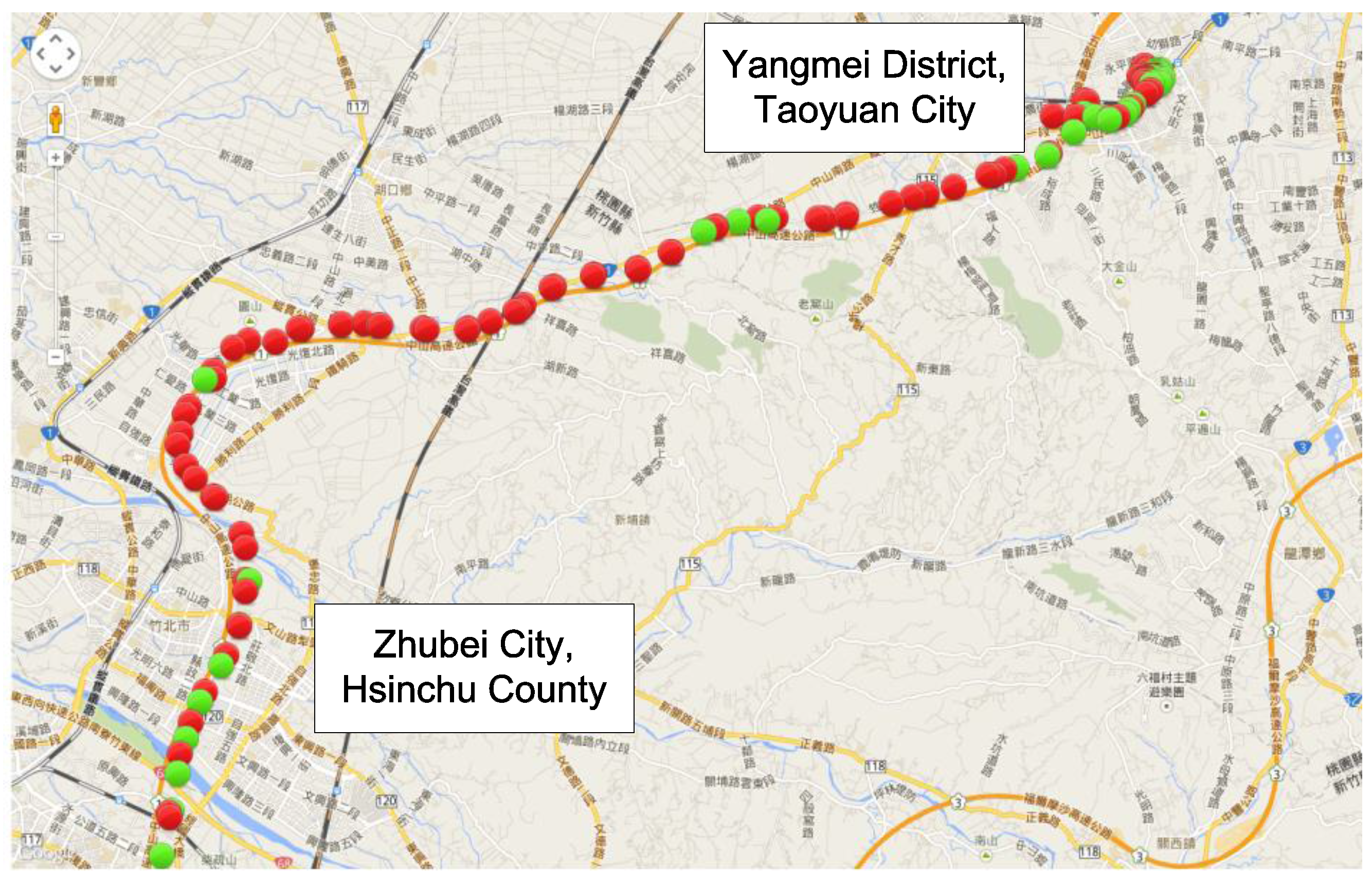
Figure 7 and
Figure 8 show the location information of the OBU with different positioning methods. The green point locations were determined by GPS; the red points were determined by mobile positioning methods. In these cases, the GPS satellite signals were weak. Many locations determined with the cell-ID-based positioning method [
9] are not properly on the road segment in
Figure 7. The results show that the cell-ID-based positioning method cannot provide precise location information. However,
Figure 8 shows that the locations determined using the proposed positioning method fit the road segment. Therefore, the proposed positioning method is more suitable than cell-ID-based positioning.
5.2.2. Evaluation and Discussions
The practical results of using the proposed mobile positioning method are illustrated and evaluated in this section. In this study, the CVO data from October 2013 to January 2014 was collected for evaluation. The data of October 2013 was used as training data, and the data from November 2013 to January 2014 was used as testing data.
For the analyses of OBU traces,
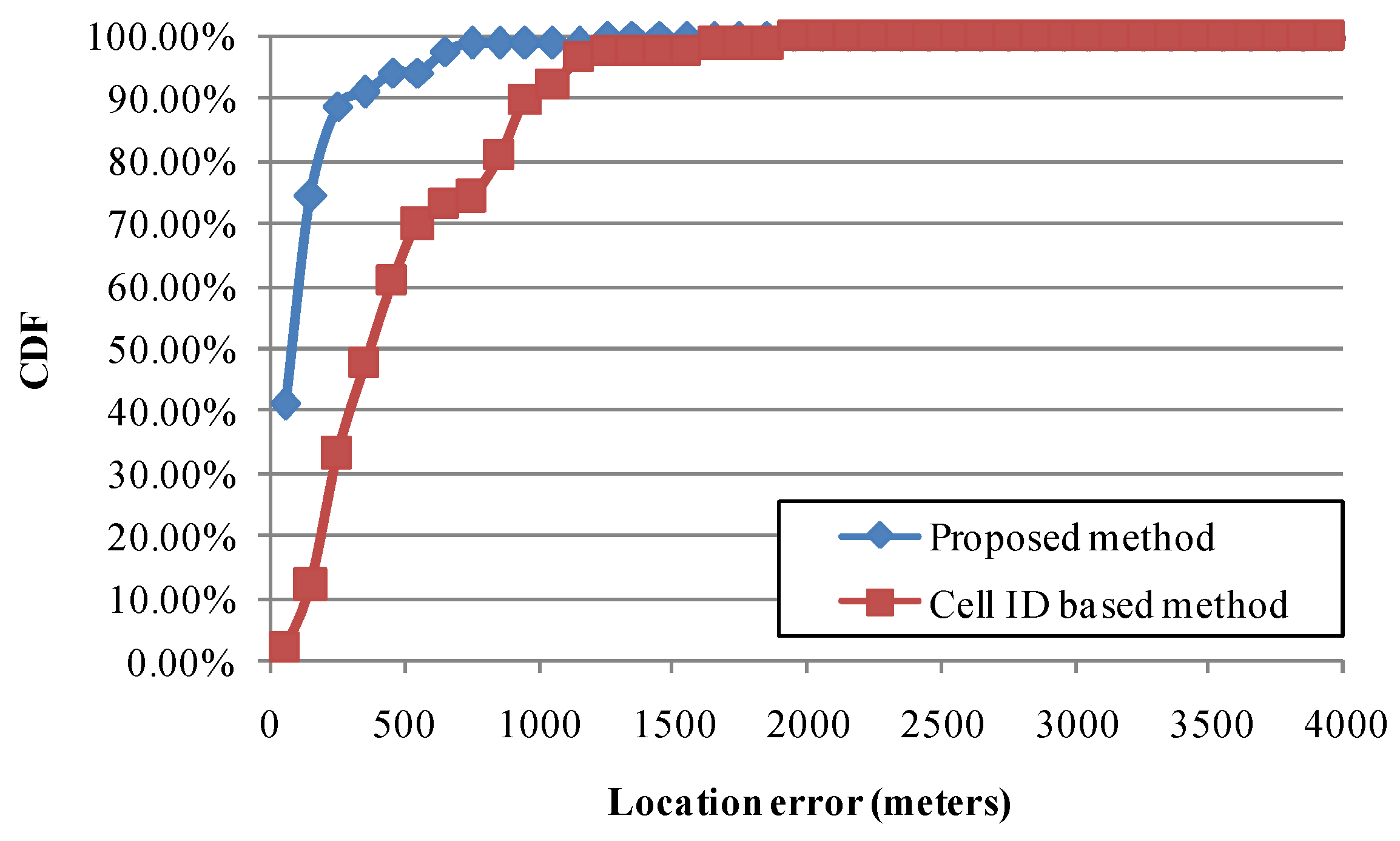
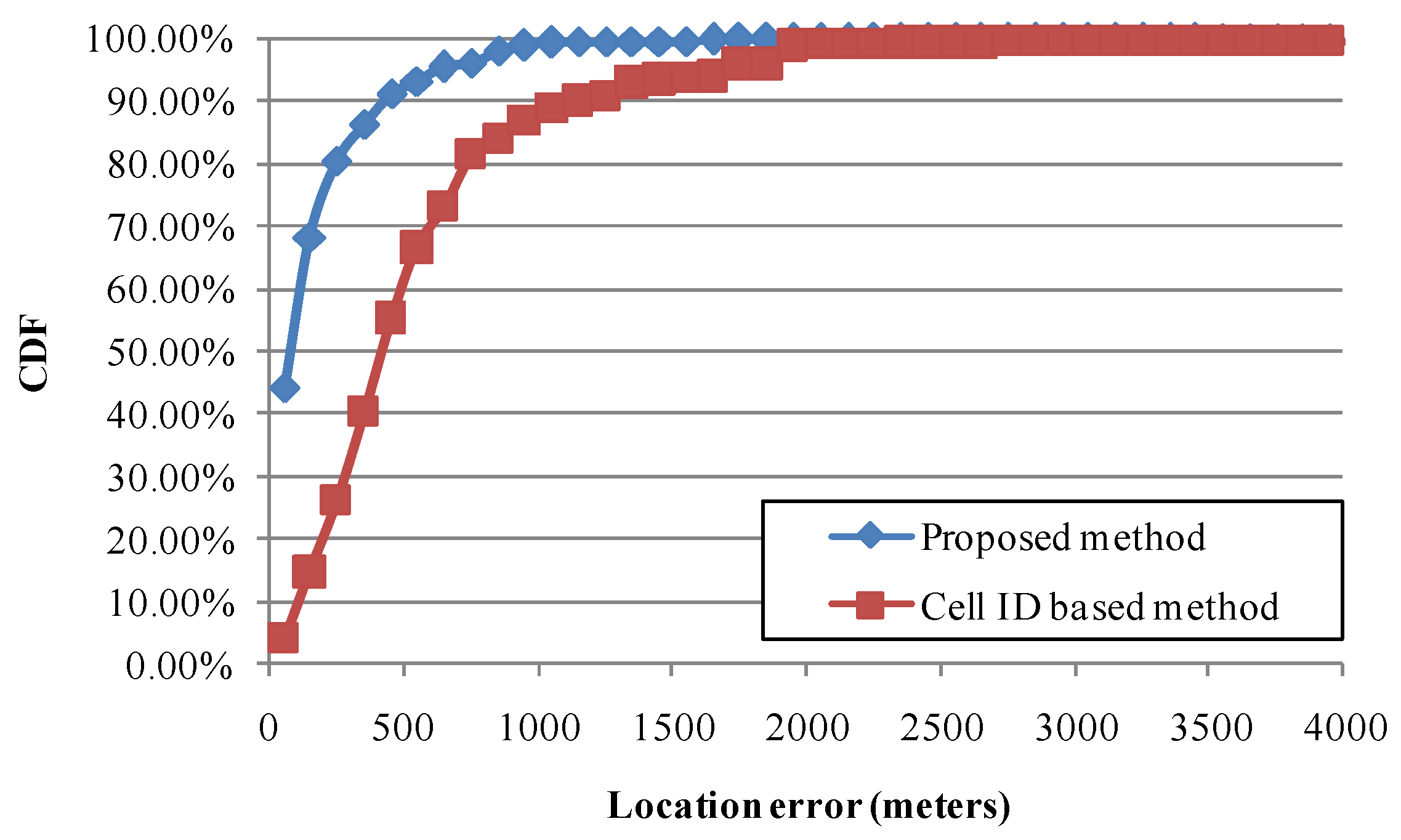
Table 1 shows the practical results of location determination with different positioning methods (
i.e., GPS, cell-ID-based method, and the proposed method) on 23 November 2013. The location information obtained from a GPS receiver was defined as the baseline data. In this case, the availability of GPS was only approximately 6.31%, so 93.69% of total records would lack GPS location information. This study compared location information using mobile positioning methods and GPS when GPS was available. The cell-ID-based positioning method [
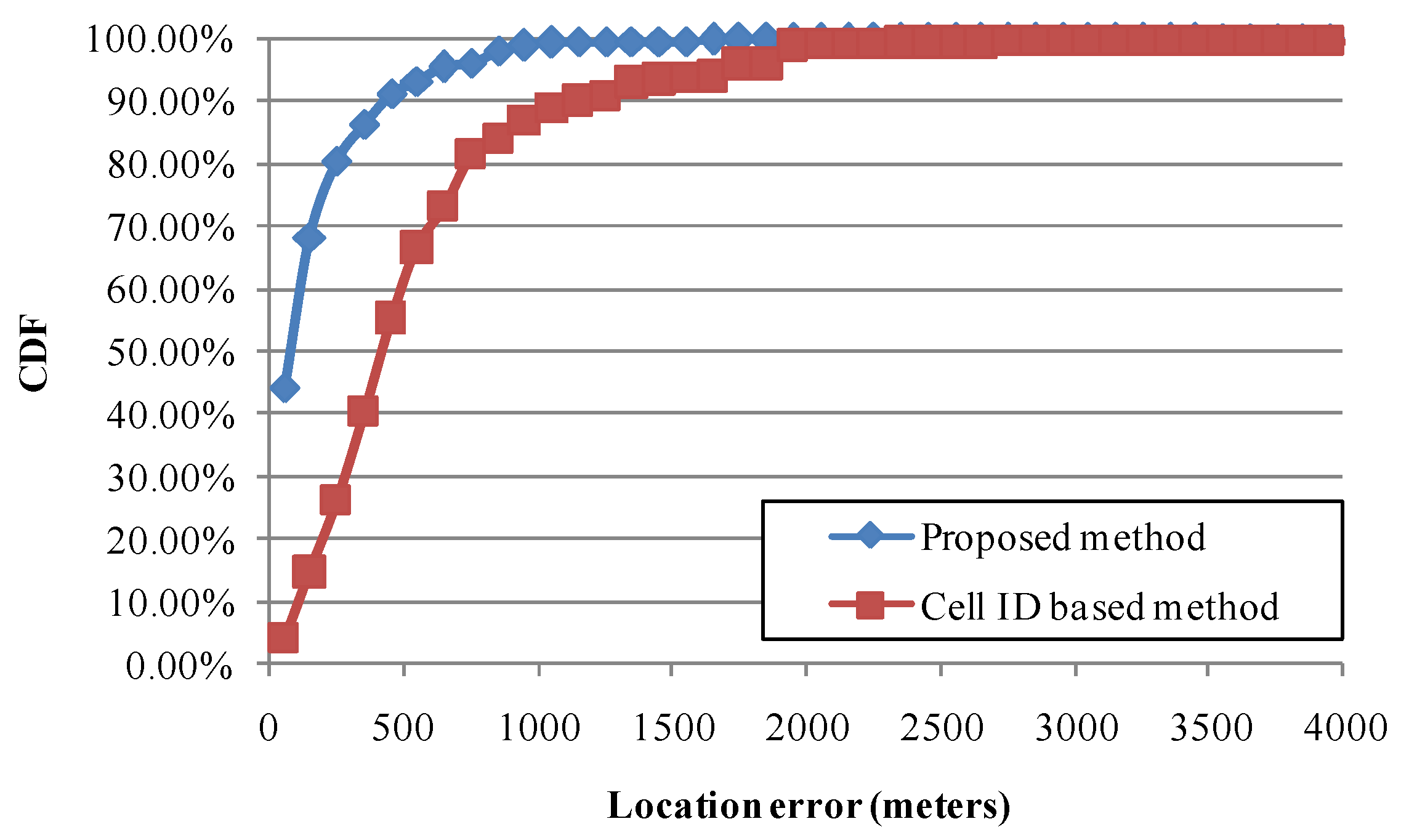
9] was considered to be implemented and evaluated, and the errors in location determination and availability were approximately 521.2 m and 99.51%, respectively. Finally, this study implemented and evaluated the proposed mobile positioning method, and the errors of location determination and availability were approximately 163.7 m and 99.58%, respectively. The CDFs of location errors in this case are shown in
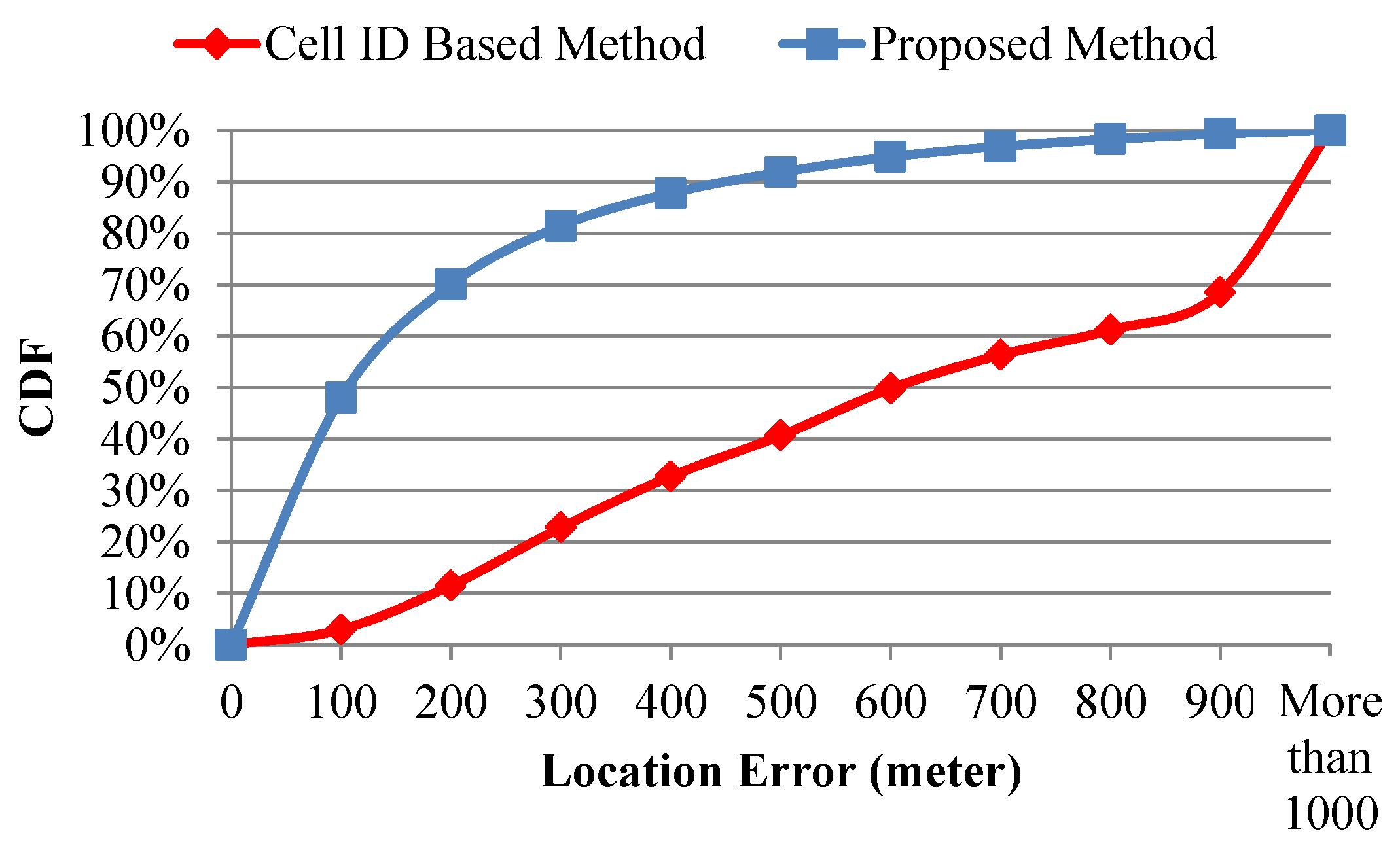
Figure 9. In another case,
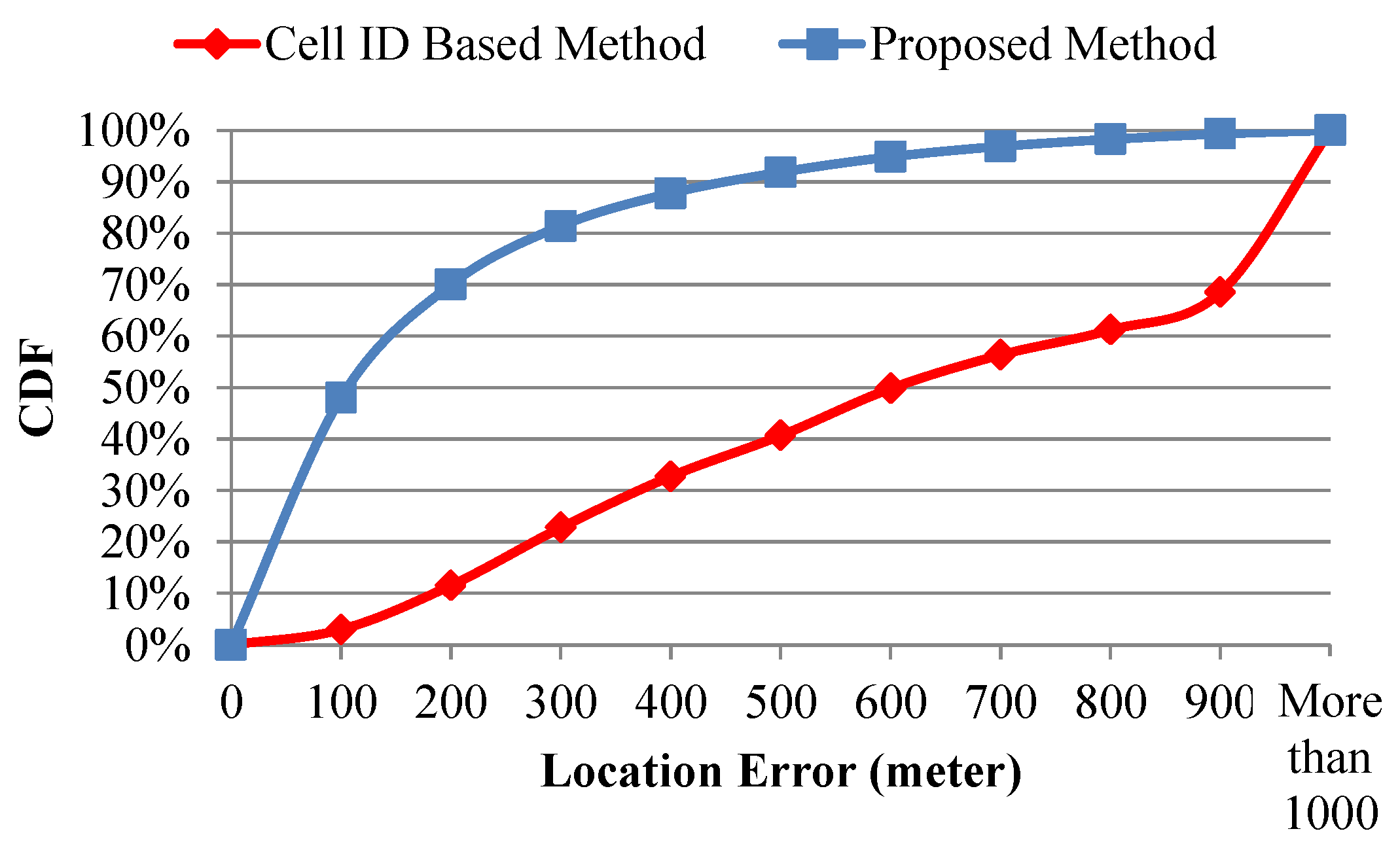
Table 2 and
Figure 10 compare different positioning methods on 4 December 2013. The results indicate that the availabilities of the cell-ID-based method and the proposed method are 72.50% and 99.49%, respectively. These results show that the proposed mobile positioning method can provide the precise location information and is suitable for CVO.
This study evaluates the proposed method for the six road types defined in [
38] (national highway, provincial highway, urban road, county road, village road, and alley). From November 2013 to January 2014, 6,571,550 records were collected, and the ratio of records for each road type was calculated in
Table 3. Because commercial vehicles are usually driven on national highways and urban roads, the ratios of national highways and urban roads are 36.470% and 42.639%, respectively.
Table 4 and
Table 5 show the analyses of average location error and availability rate using various location determination methods. The practical experimental results indicate that the average location error using the proposed method is lower than using the cell-ID-based positioning method (
Figure 11). The proposed method obtained more precise location information for each road type. Furthermore, when GPS is unavailable, the proposed method with its higher availability rate can be used to determine the locations of commercial vehicles for each road type, particularly urban roads.
6. Conclusions
A high-efficiency mobile positioning method is proposed to collect and analyze the cellular network signals of CVO data. Parallel computing and cloud computing techniques are designed into the proposed mobile positioning method to quickly determine the location of an OBU for CVO. Furthermore, this study proposes analytical models to analyze the availability of the proposed mobile positioning method with different outlier filtering criteria. In experimental environments, a CVO system was designed and implemented to collect CVO data from Chunghwa Telecom and to analyze the cellular network signals of CVO data for location determination. A case study determined that the average location errors using the proposed method and the traditional cell-ID-based method were 163.7 m and 521.2 m, respectively. Furthermore, the practical results show that the average location error and availability of using the proposed method are better than using GPS and the cell-ID-based method for each road type, particularly urban roads. Therefore, this approach is feasible to determine the location of an OBU for CVO improvement.
In future work, the signals of neighboring cells can be analyzed simultaneously to improve mobile positioning. Moreover, the proposed method for generating precise location information can be applied to support other ITS applications (e.g., advanced public transportation services, advanced traffic information services, etc.).
Acknowledgments
We would like to thank editor and reviewers for their comments. We also thank MDPI publisher for their supports.
Author Contributions
Chi-Hua Chen and Kuen-Rong Lo conceived and designed the experiments; Chi-Hua Chen performed the experiments; Chi-Hua Chen and Jia-Hong Lin analyzed the data; Ta-Sheng Kuan contributed analysis tools; Chi-Hua Chen wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hsu, C.L.; Lin, J.C.C. A study of the adoption behavior for In-Car GPS navigation systems. Int. J. Mob. Commun. 2010, 8, 603–624. [Google Scholar] [CrossRef]
- Liu, L.M.N.Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar]
- Zhou, S.; Pollard, J.K. Position measurement using Bluetooth. IEEE Trans. Consum. Electron. 2006, 52, 555–558. [Google Scholar] [CrossRef]
- Roos, T.; Myllymaki, P.; Tirri, H.; Misikangas, P.; Sievanan, J. A probabilistic approach to WLAN user location estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus WLAN location determination system. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, Washington, DC, USA, 6–8 June 2005; pp. 205–218.
- Chiou, Y.S.; Wang, C.L.; Yeh, S.C. An adaptive location estimator using tracking algorithms for indoor WLANs. Wirel. Netw. 2010, 16, 1987–2012. [Google Scholar] [CrossRef]
- Guarnieri, A.; Pirotti, F.; Vettore, A. Low-cost MEMS sensors and vision system for motion and position estimation of a scooter. Sensors 2013, 13, 1510–1522. [Google Scholar] [CrossRef] [PubMed]
- Cenedese, A.; Ortolan, G.; Bertinato, M. Low-density wireless sensor networks for localization and tracking in critical environments. IEEE Trans. Veh. Technol. 2010, 59, 2951–2962. [Google Scholar] [CrossRef]
- 3GPP. Technical Specification Group (TSG) Services and System Aspects; TS 22.071; 3GPP: Valbonne, France, 2015. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Open Mobile Alliance: Secure User Plane Location V2.0 Enabler Release Package. Available online: http://member.openmobilealliance.org/ftp/Public_documents/LOC/Permanent_documents/OMA-ERP-SUPL-V2_0-20080627-C.zip (accessed on 26 March 2016).
- Venkatachalam, M.; Etemad, K.; Ballantyne, W.; Chen, B. Location services in WiMAX networks. IEEE Commun. Mag. 2009, 47, 92–98. [Google Scholar] [CrossRef]
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Qi, Y.; Kobayashi, H.; Suda, H. Analysis of wireless geolocation in a non-line-of-sight environment. IEEE Trans. Wirel. Commun. 2006, 5, 672–681. [Google Scholar]
- Niculescu, D.; Nath, B. Ad Hoc Positioning System (APS) using AOA. In Proceedings of the IEEE INFOCOM Twenty-Second Annual Joint Conference of the IEEE Computer and Communications, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743.
- Addlesee, M.; Curwen, R.; Hodges, S.; Newman, J.; Steggles, P.; Ward, A.; Hopper, A. Implementing a sentient computing system. Computer 2001, 34, 50–56. [Google Scholar] [CrossRef]
- Savvides, A.; Han, C.C.; Strivastava, M.B. Dynamic fine-grained localization in ad-hoc networks of sensors. In Proceedings of the ACM/IEEE MOBICOM International Conference on Mobile Computing and Networking, Rome, Italy, 16–21 July 2001; pp. 166–179.
- Bshara, M.; Orguner, U.; Gustafsson, F.; Biesen, L.V. Fingerprinting localization in wireless networks based on received-signal-strength measurements: A case study on WiMAX networks. IEEE Trans. Veh. Technol. 2010, 59, 283–294. [Google Scholar] [CrossRef]
- Bshara, M.; Orguner, U.; Gustafsson, F.; Biesen, L.V. Robust tracking in cellular networks using HMM filters and cell-ID measurements. IEEE Trans. Veh. Technol. 2011, 60, 1016–1024. [Google Scholar] [CrossRef]
- Chang, M.F.; Chen, C.H.; Lin, Y.B.; Chia, C.Y. The frequency of CFVD speed report for highway traffic. Wirel. Commun. Mob. Comput. 2015, 15, 879–888. [Google Scholar] [CrossRef]
- Gundlegård, D.; Karlsson, J.M. Handover location accuracy for travel time estimation in GSM and UMTS. IET Intell. Transp. Syst. 2009, 3, 87–94. [Google Scholar] [CrossRef]
- Paek, J.; Kim, K.H.; Singh, J.P.; Govindan, R. Energy-efficient positioning for smartphones using Cell-ID sequence matching. In Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services, Bethesda, MD, USA, 28 June–1 July 2011; pp. 293–306.
- Chen, C.H.; Lin, B.Y.; Lin, C.H.; Liu, Y.S.; Lo, C.C. A green positioning algorithm for campus guidance system. Int. J. Mob. Commun. 2012, 10, 119–131. [Google Scholar] [CrossRef]
- Lin, B.Y.; Chen, C.H.; Lo, C.C. A novel speed estimation method using location service events based on fingerprint positioning. Adv. Sci. Lett. 2011, 4, 3735–3739. [Google Scholar] [CrossRef]
- Chen, C.H.; Lo, C.C.; Lin, H.F. The analysis of speed-reporting rates from a cellular network based on a fingerprint-positioning algorithm. S. Afr. J. Ind. Eng. 2013, 24, 98–106. [Google Scholar] [CrossRef]
- Chen, C.H.; Lin, B.Y.; Chang, H.C.; Lo, C.C. The novel positioning algorithm based on cloud computing—A case study of intelligent transportation systems. Information 2012, 15, 4519–4524. [Google Scholar]
- Cheng, D.Y.; Chen, C.H.; Hsiang, C.H.; Lo, C.C.; Lin, H.F.; Lin, B.Y. The optimal sampling period of a fingerprint positioning algorithm for vehicle speed estimation. Math. Prob. Eng. 2013, 2013, 1–12. [Google Scholar] [CrossRef]
- Wigren, T. Adaptive enhanced cell ID fingerprinting localization by clustering of precise position measurements. IEEE Trans. Veh. Technol. 2007, 56, 3199–3209. [Google Scholar] [CrossRef]
- Kuo, S.P.; Lin, S.C.; Wu, B.J.; Tseng, Y.C.; Shen, C.C. GeoAds: A middleware architecture for music service with location-aware advertisement. In Proceedings of the IEEE International Conference on Mobile Ad-hoc and Sensor Systems, Pisa, Italy, 8–11 October 2007.
- Chen, C.H. Traffic Information Estimation Methods Based on Cellular Network Data. Ph.D. Thesis, Department of Information Management and Finance, National Chiao Tung University, Hsinchu, Taiwan, 2013. [Google Scholar]
- Apache Software Fundation, Apache Hadoop 2.3.0. 2015. Available online: http://hadoop.apache.org/ (accessed on 26 March 2016).
- Apache Software Fundation, Apache Hive 0.12.0. 2015. Available online: http://hive.apache.org/ (accessed on 26 March 2016).
- Chen, C.H.; Lin, J.H.; Kuan, T.S.; Lo, K.R. A high-efficiency mobile positioning system by using commercial vehicle operation data based on cloud computing techniques. In Proceedings of the IEEE International Conference on Internet of Things, Taipei, Taiwan, 1–3 September 2014.
- Chen, C.H.; Lin, S.Y.; Chang, H.C.; Lo, C.C. On the design and development of a novel real-time transaction price estimation system. Adv. Mater. Res. 2011, 393–395, 213–216. [Google Scholar] [CrossRef]
- Levine, D.; Krehbiel, T.C.; Berenson, M.L. Basic Business Statistics: Concepts and Applications, 10th ed.; Pearson Education: New York, NY, USA, 2005. [Google Scholar]
- Chen, C.H.; Lin, H.F.; Chang, H.C.; Ho, P.H.; Lo, C.C. An analytical framework of a deployment strategy for cloud computing services: A case study of academic websites. Math. Prob. Eng. 2013, 2013, 1–14. [Google Scholar] [CrossRef]
- Wikipedia, Error Function. 2015. Available online: http://en.wikipedia.org/wiki/Error_function (accessed on 26 March 2016).
- Ministry of Justice of the Republic of China, Highway Act. 2015. Available online: http://law.moj.gov.tw/LawClass/LawAll.aspx?PCode=K0040001 (accessed on 26 March 2016).
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}