
Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China


 ,
,
Abstract
:1. Introduction
2. Materials
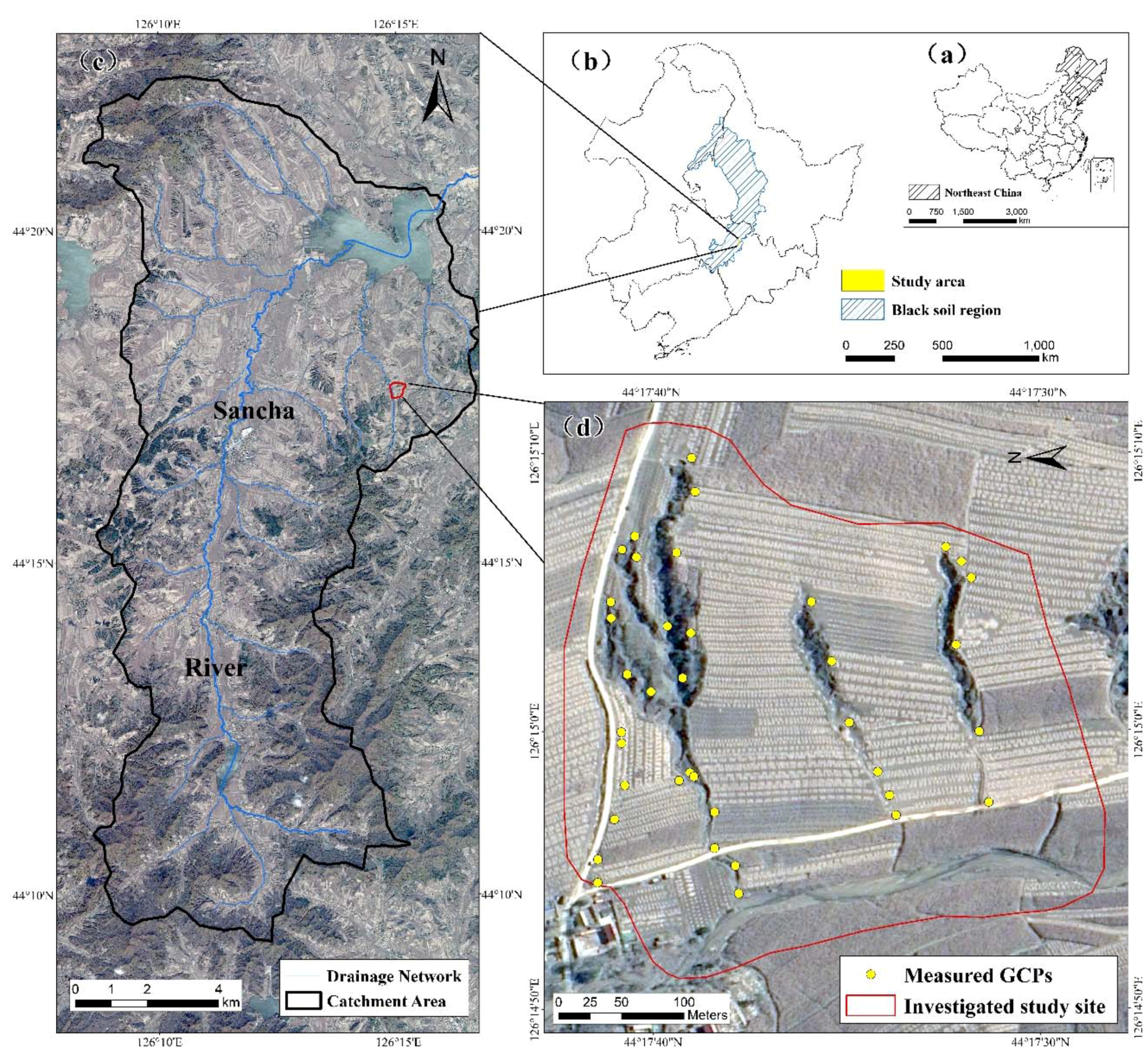
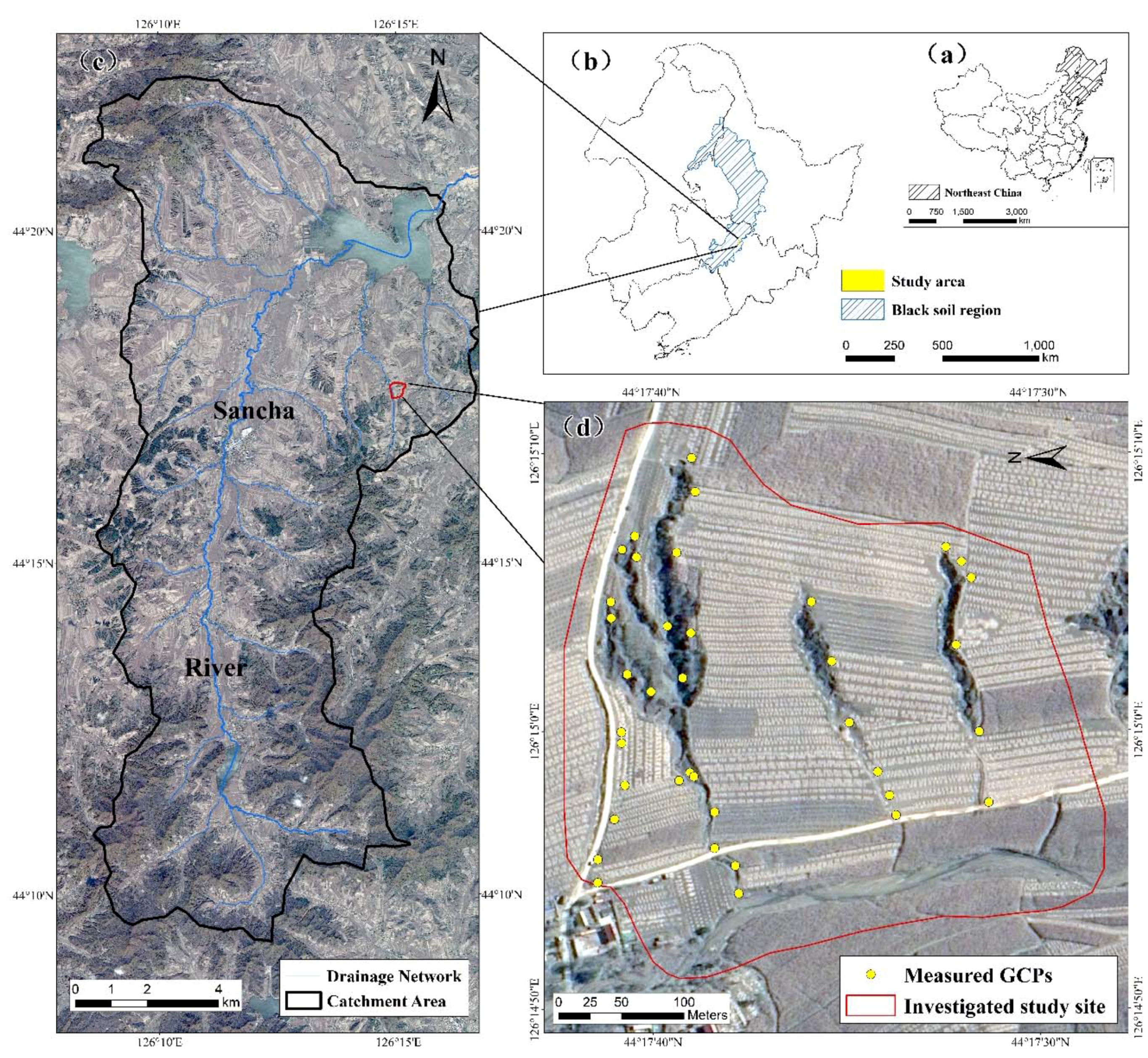
2.1. Study Area
2.2. Data Sources
3. Methods
3.1. Pleiades-1A Imagery for Area-Wide Mapping
3.2. UAV-Based Remote Sensing for Detailed Mapping
4. Results
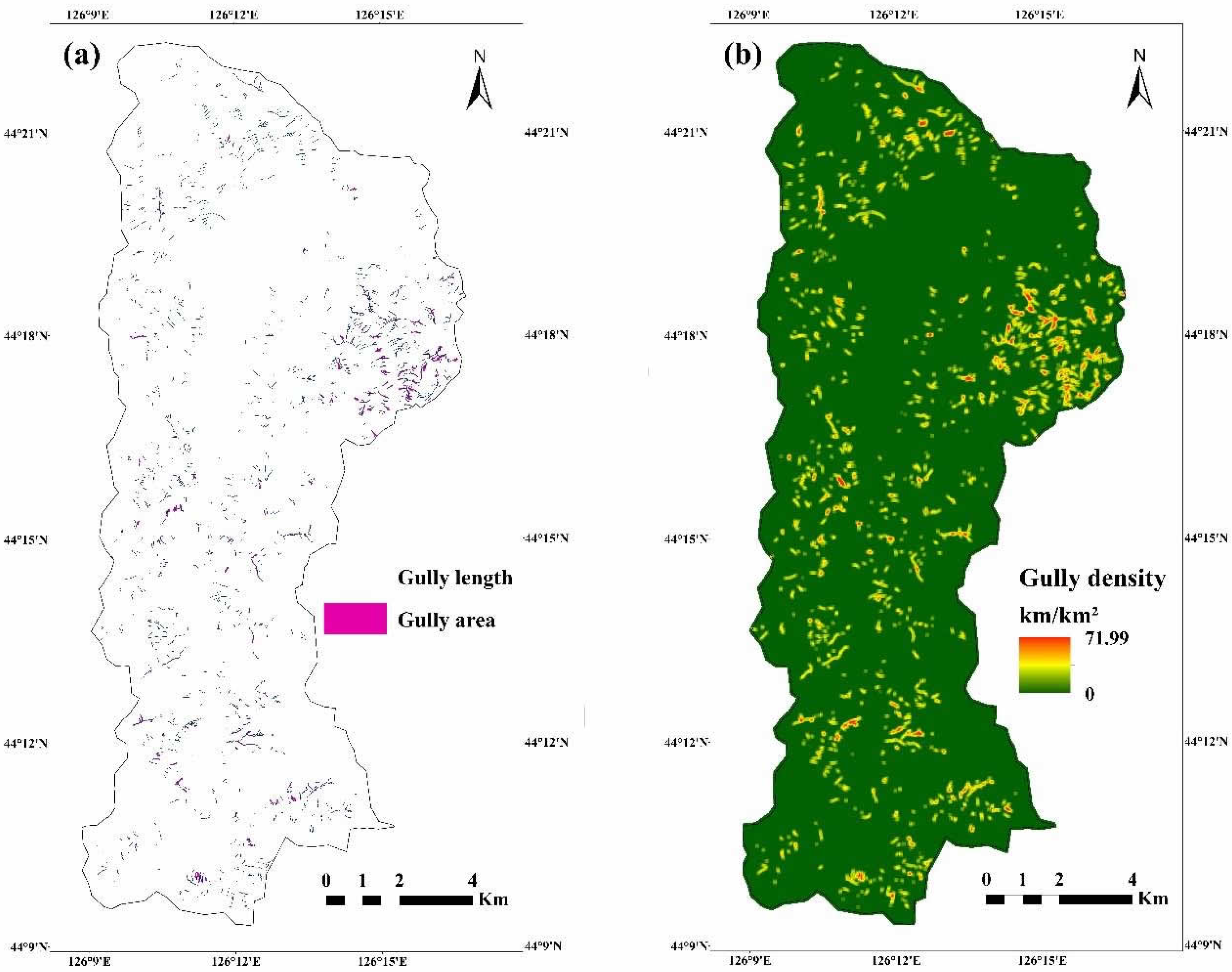
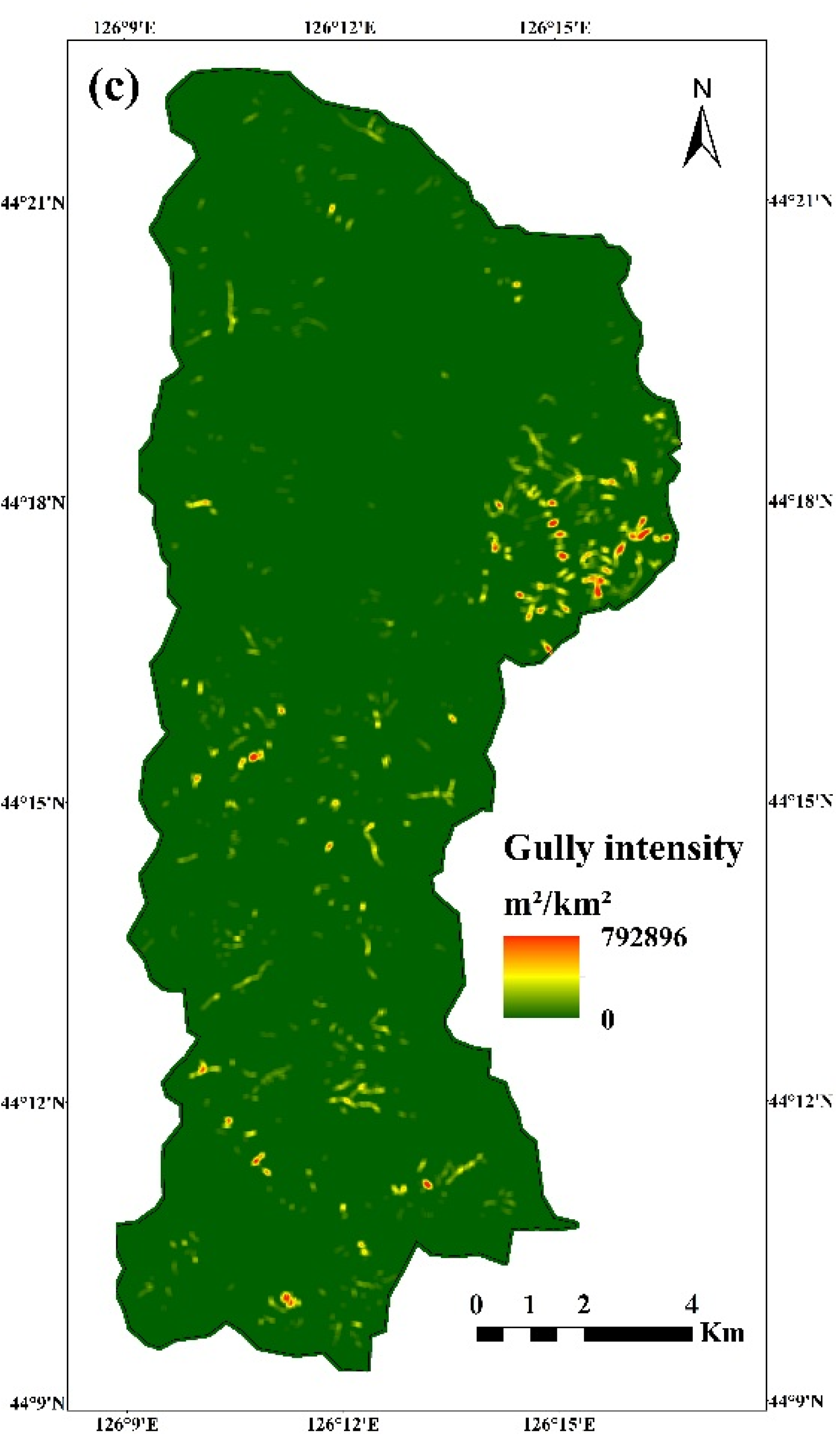
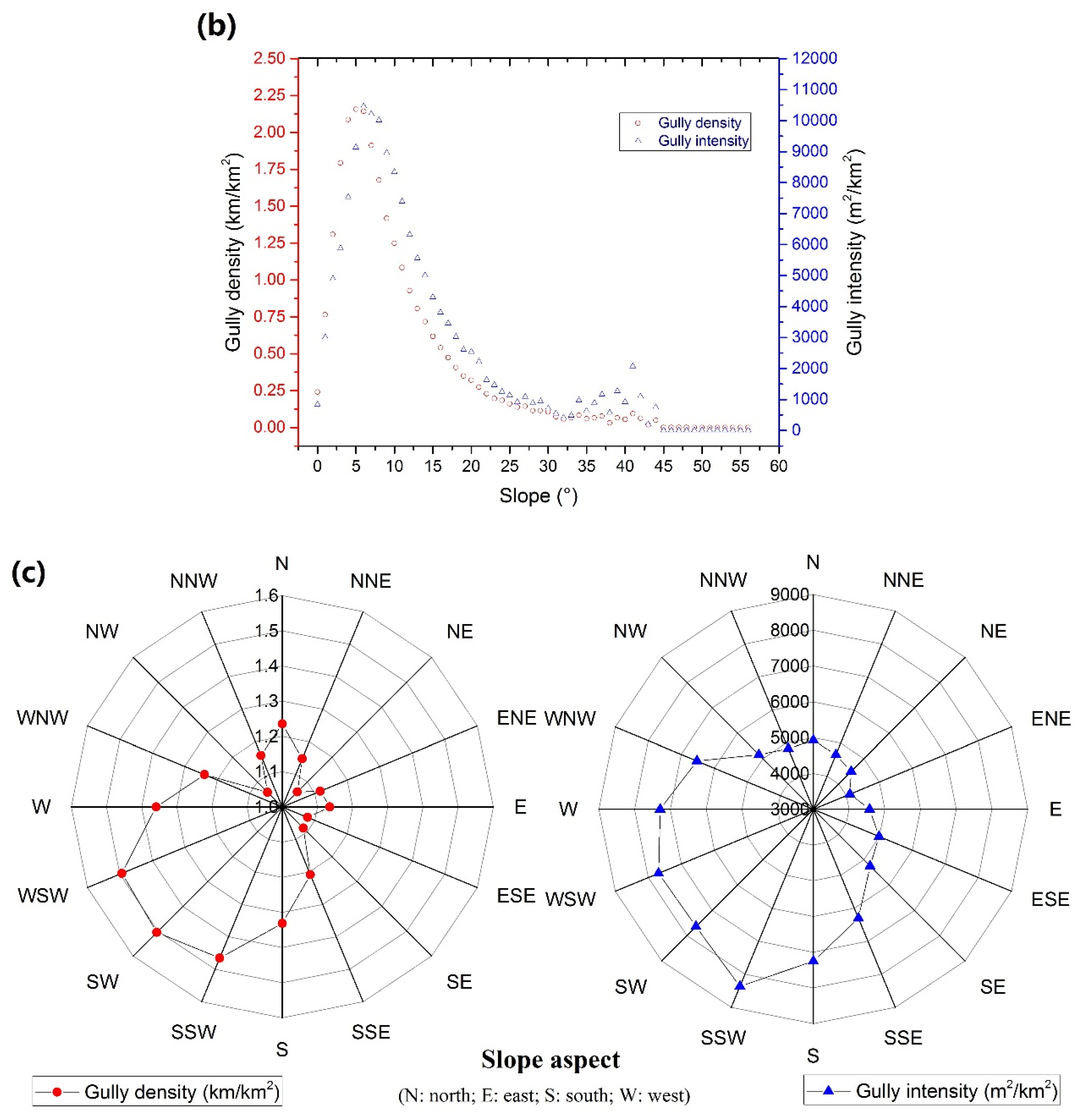
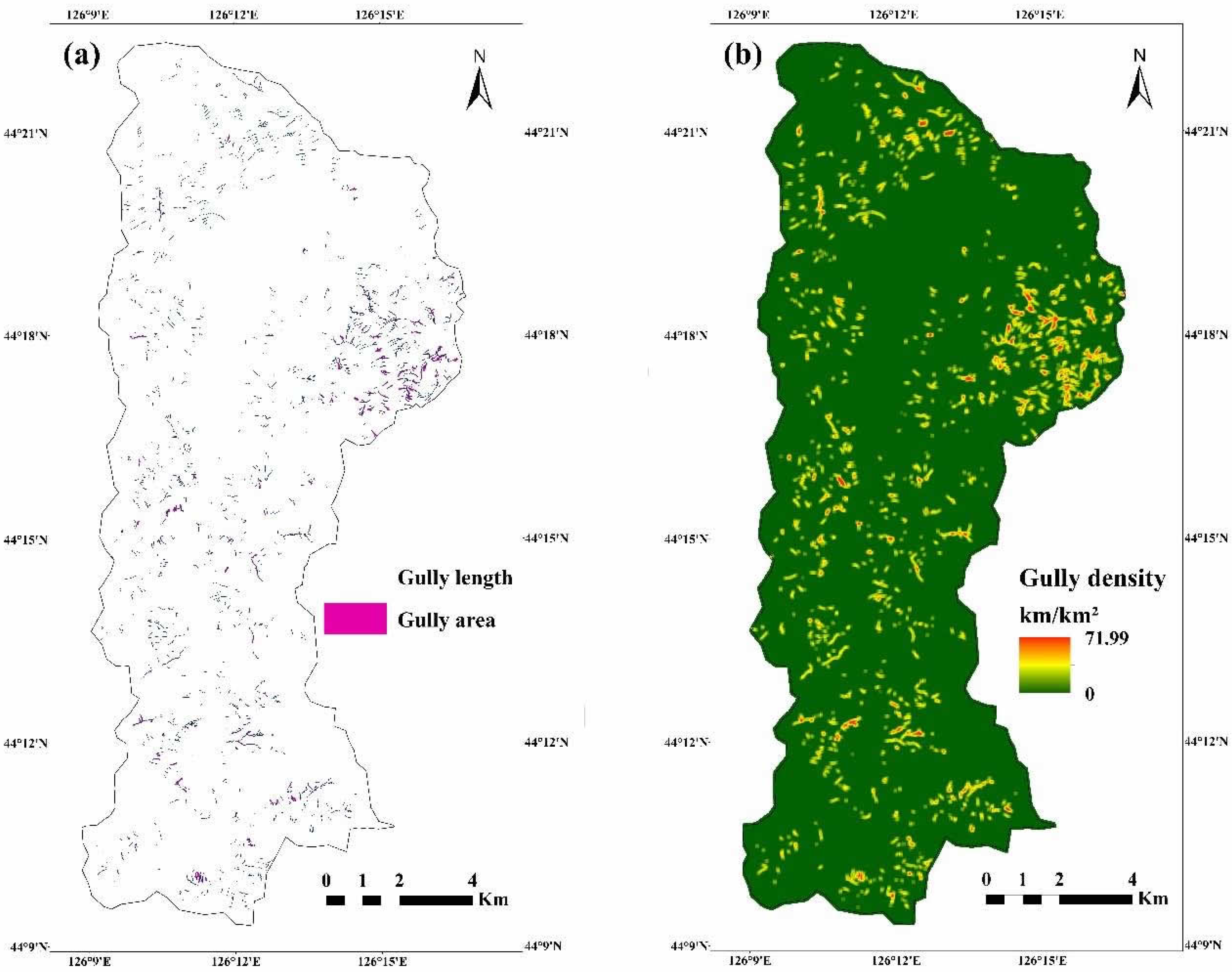
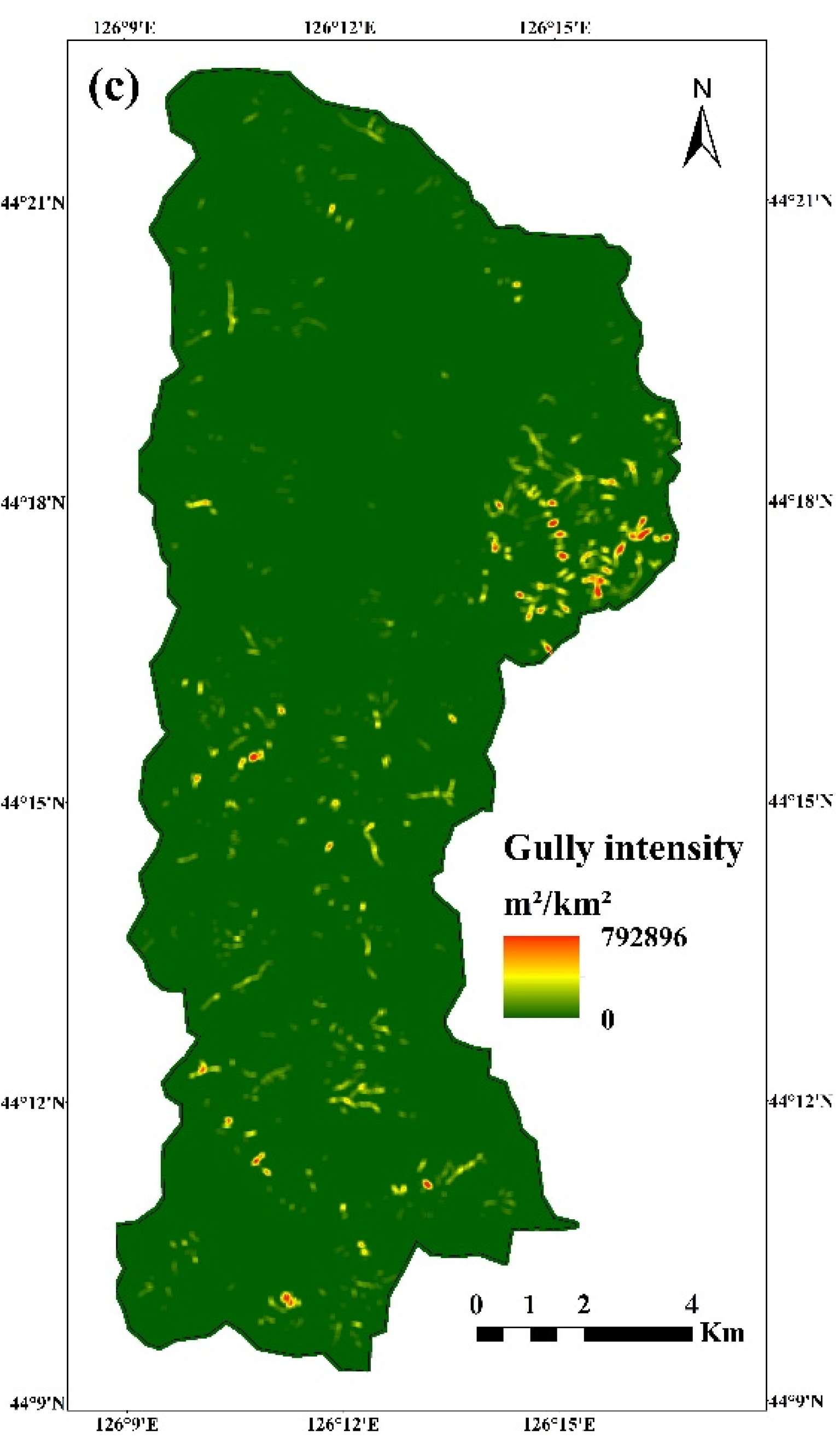
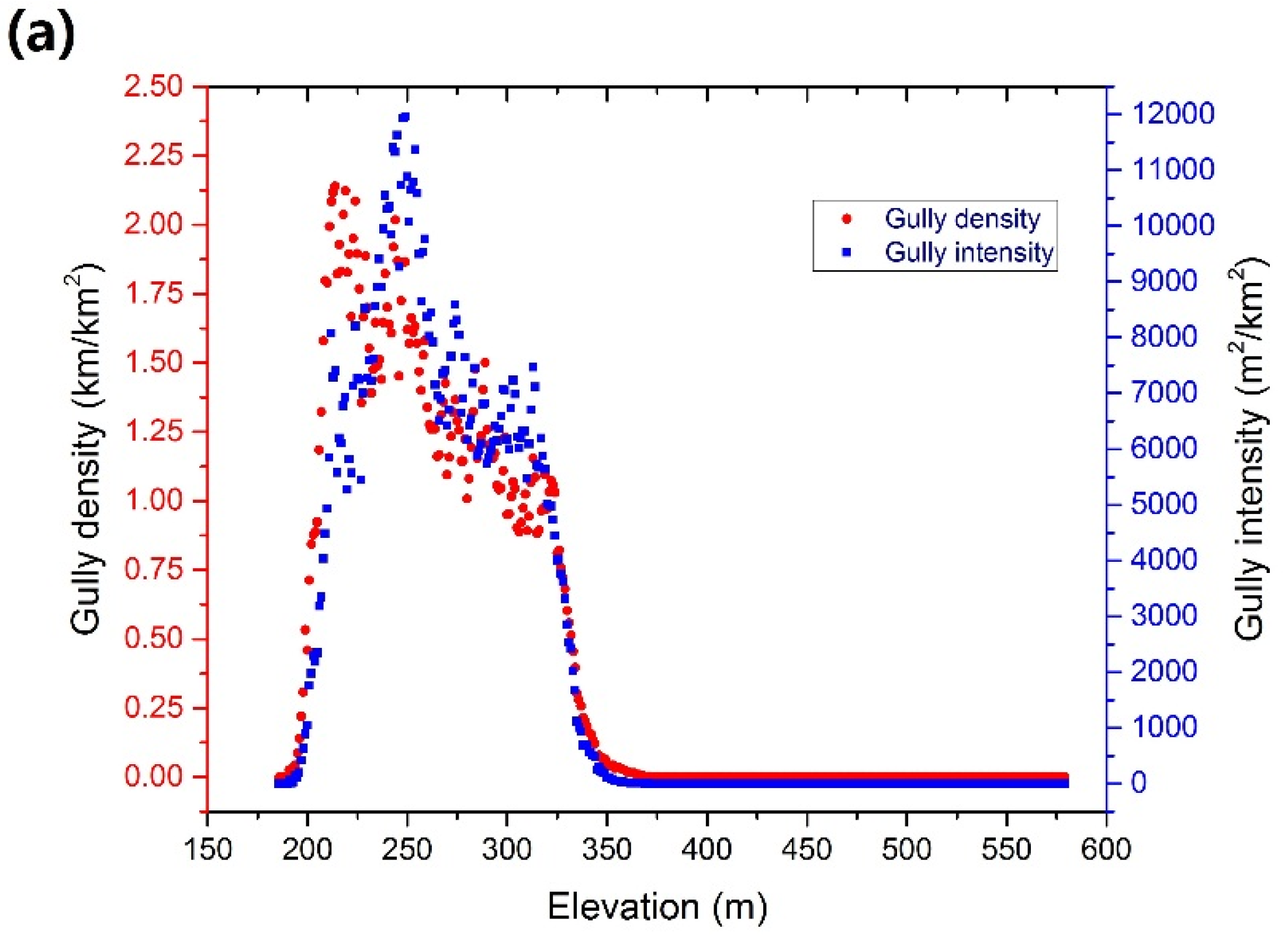
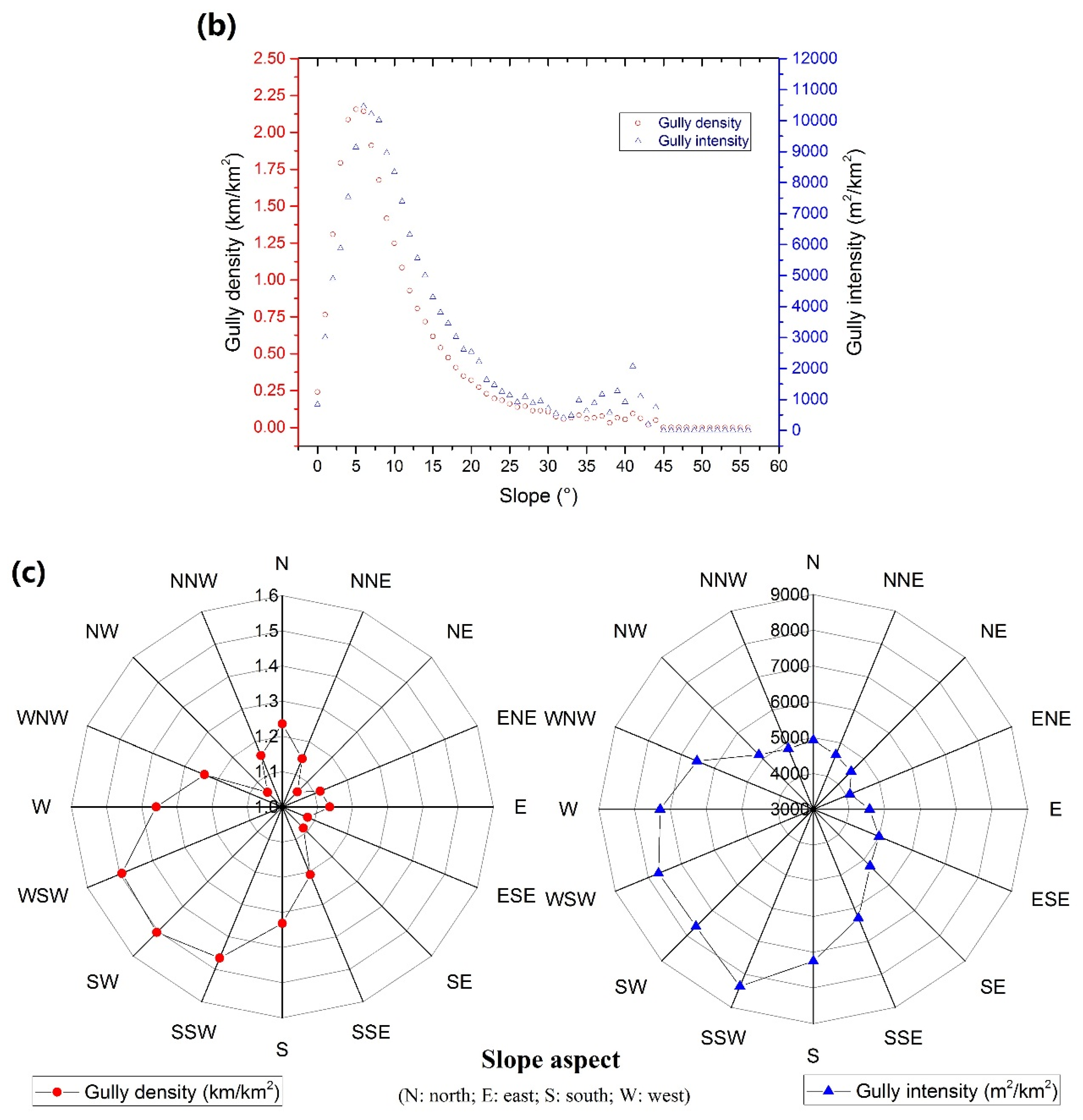
4.1. Spatial Distribution of Erosion Gullies in the Catchment
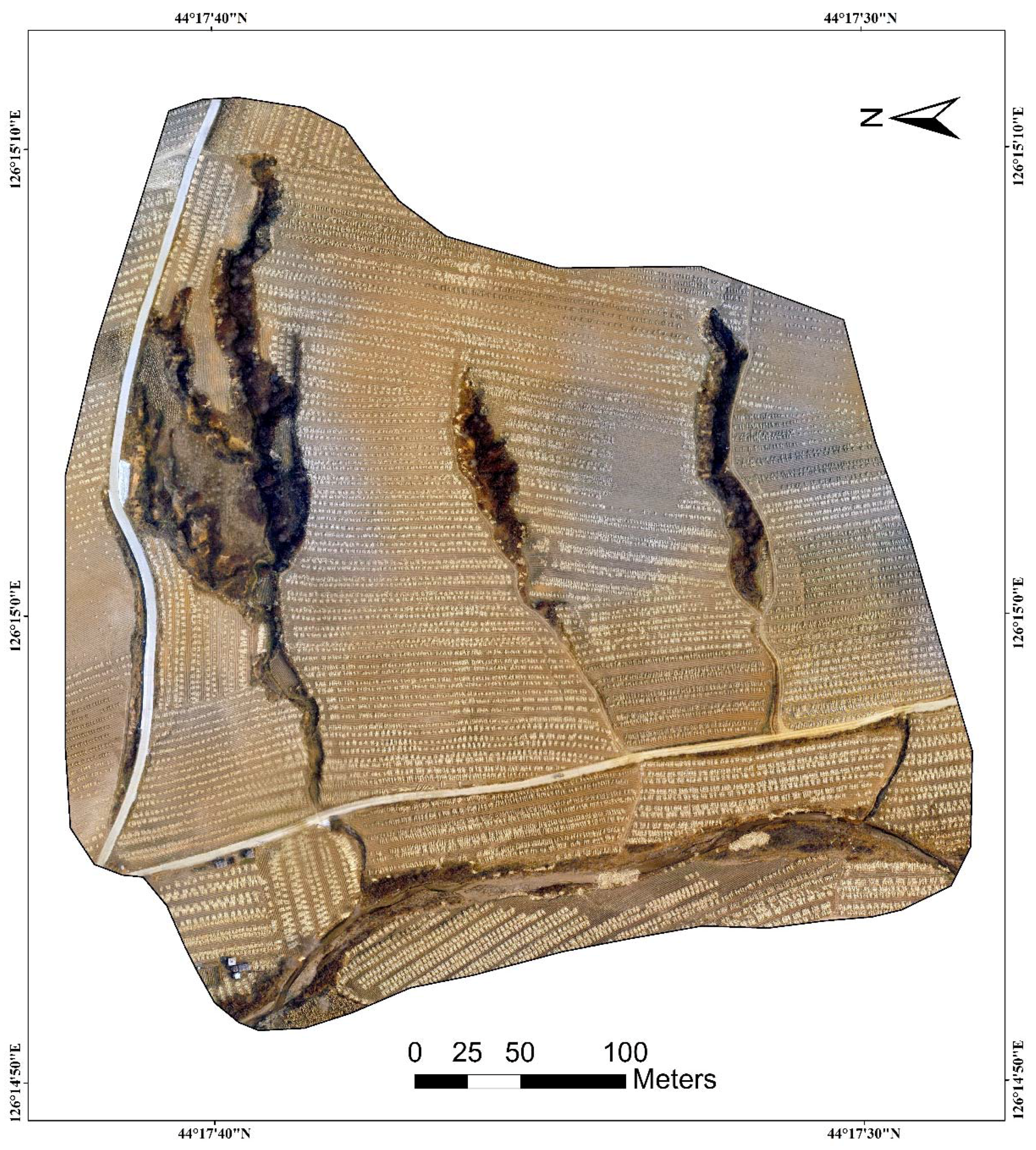
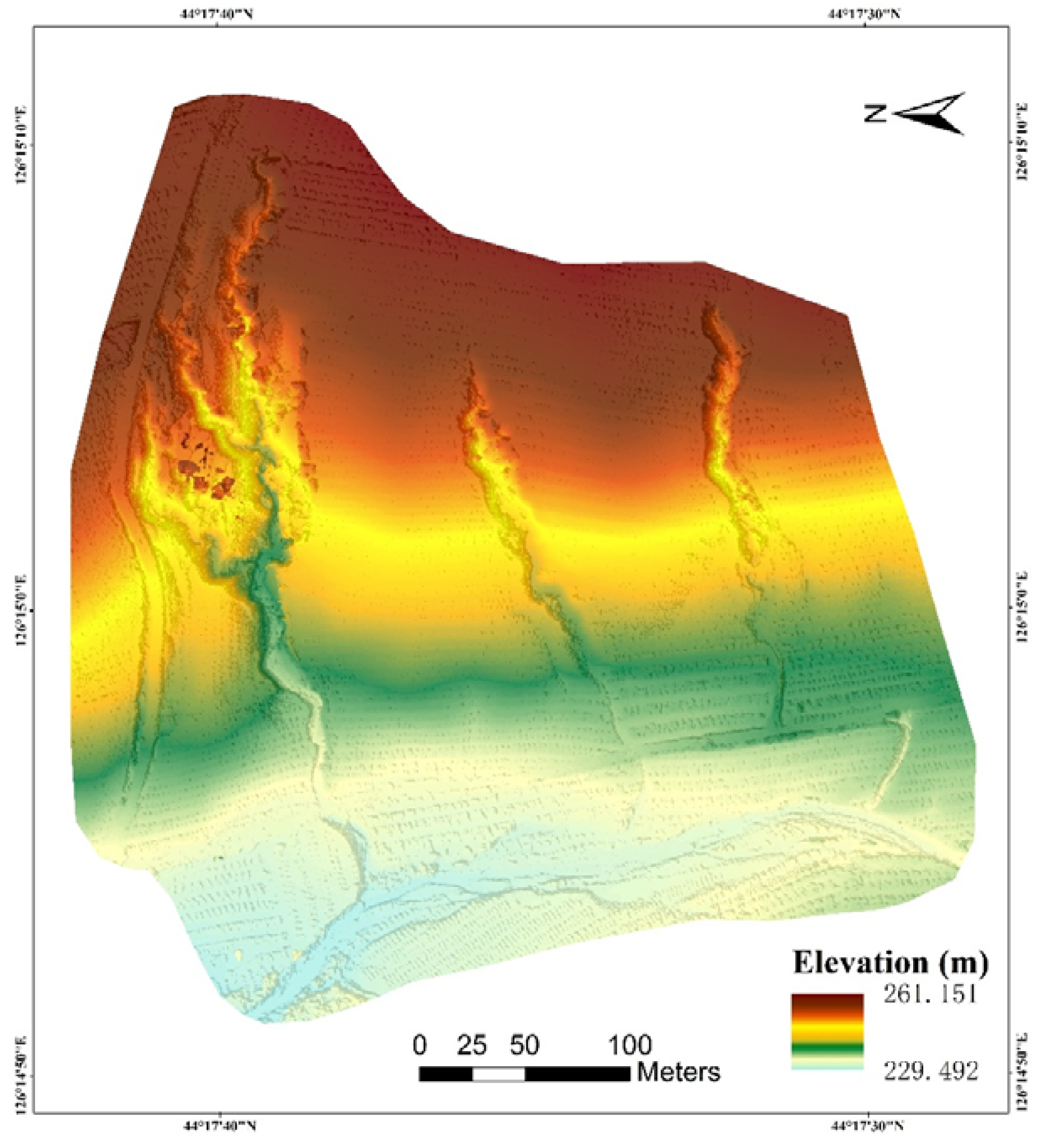
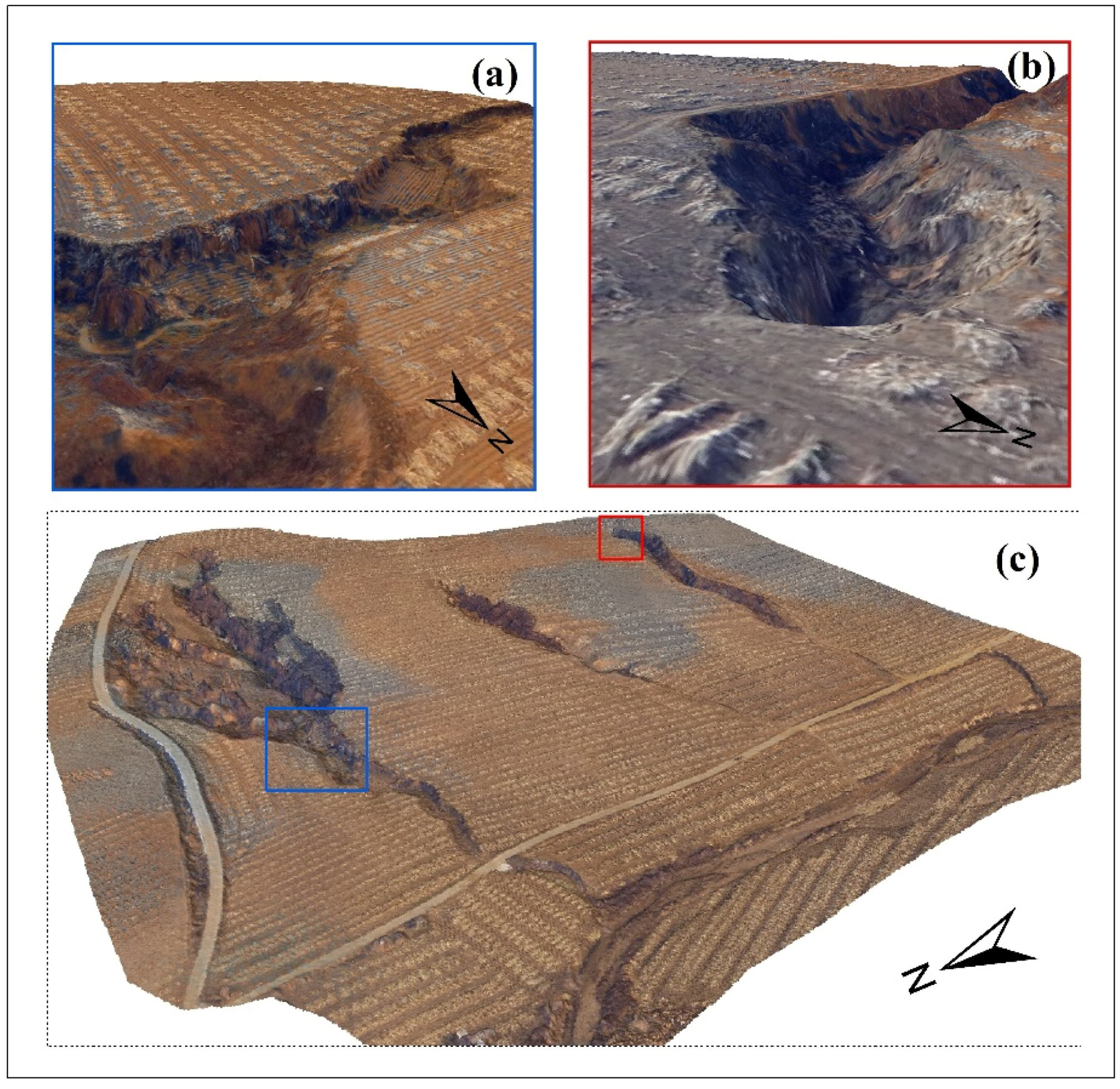
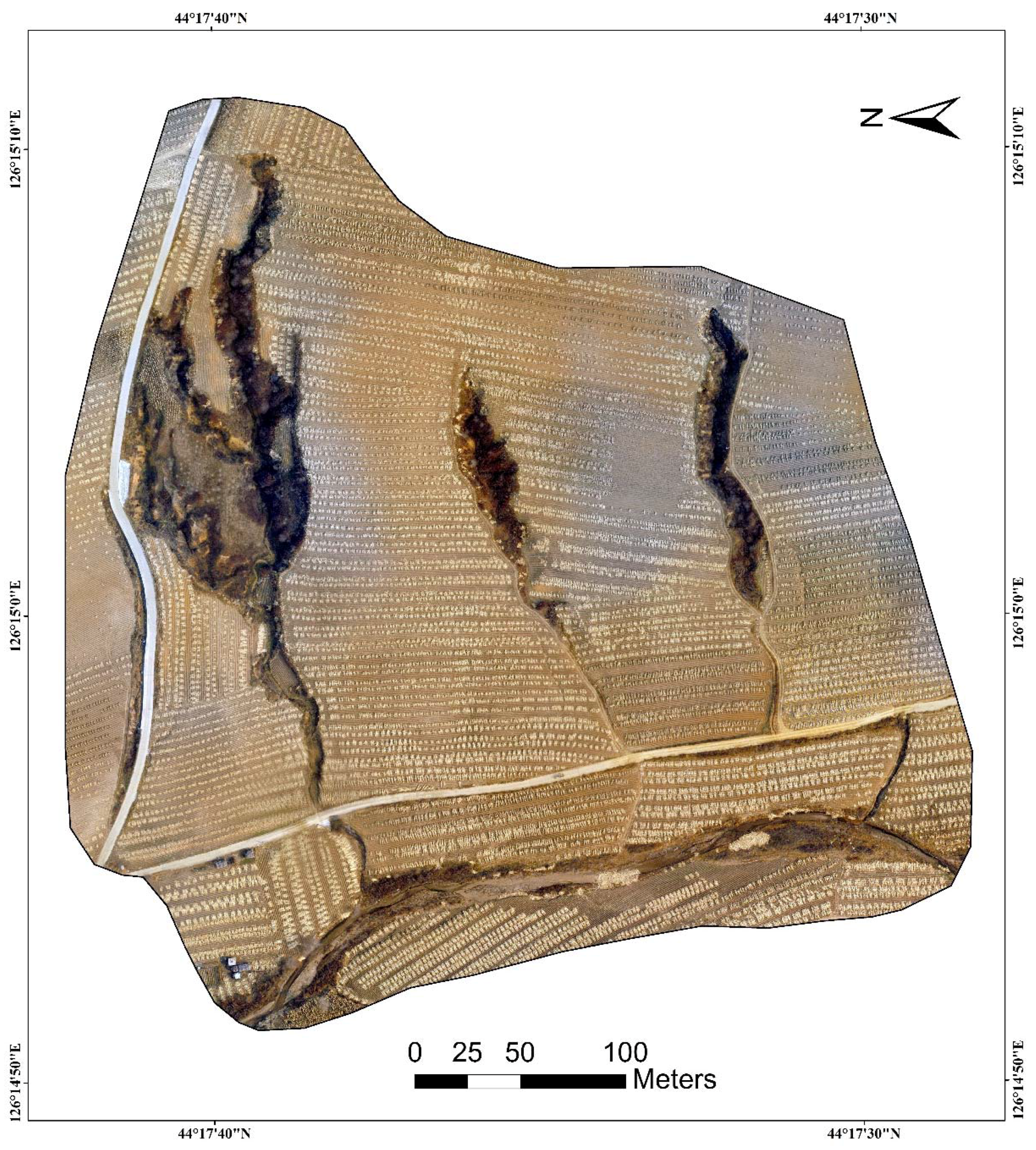
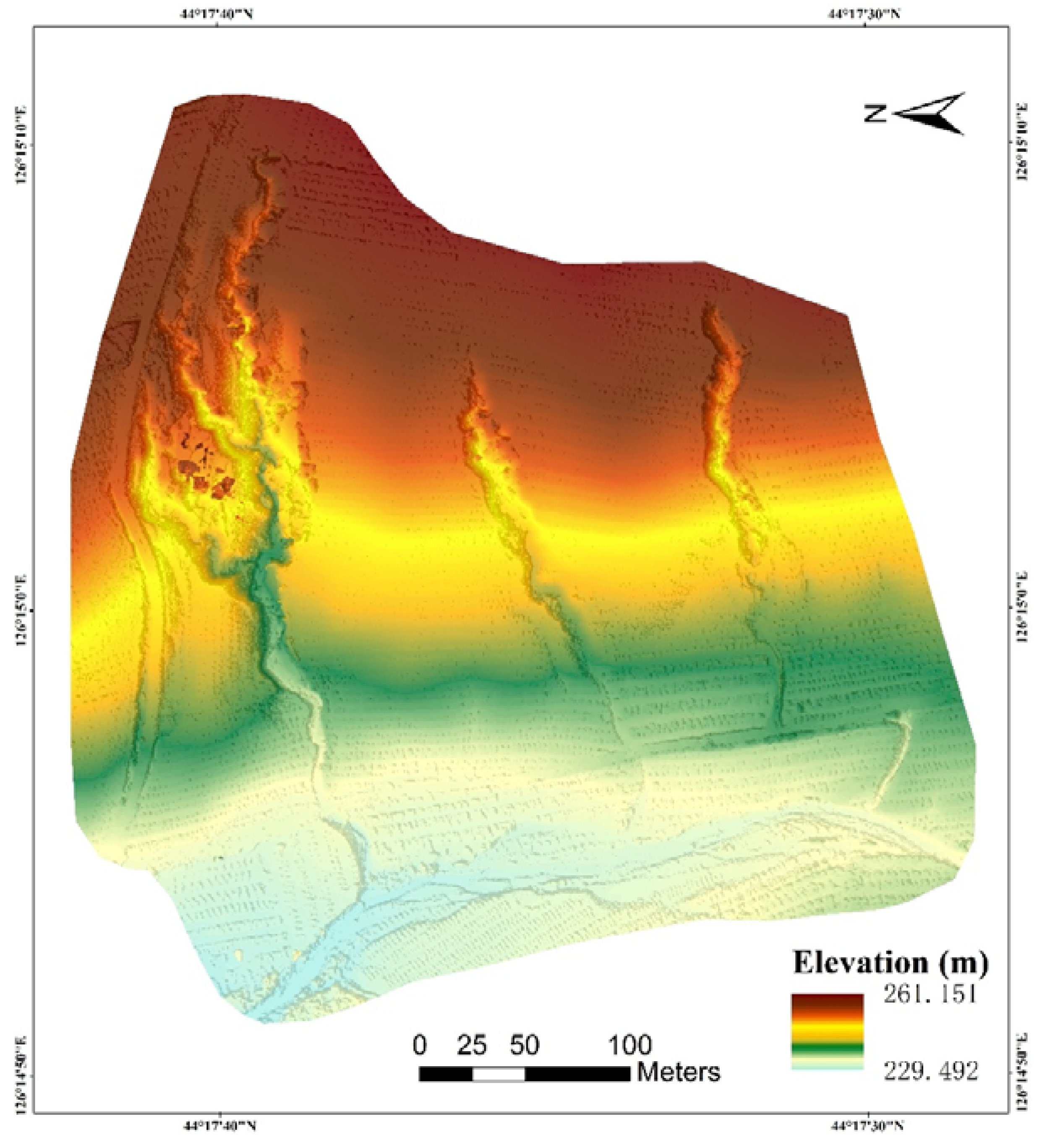
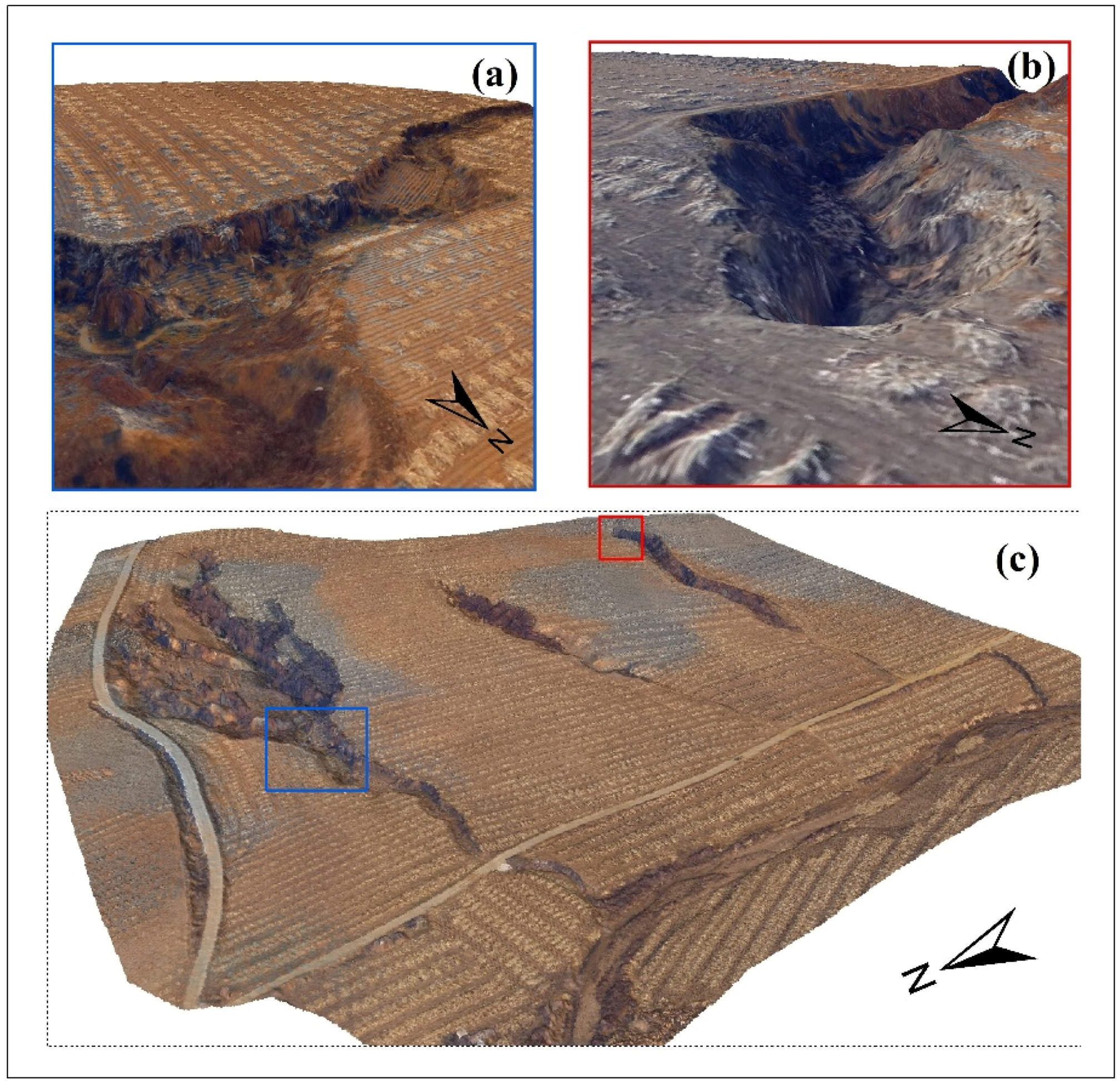
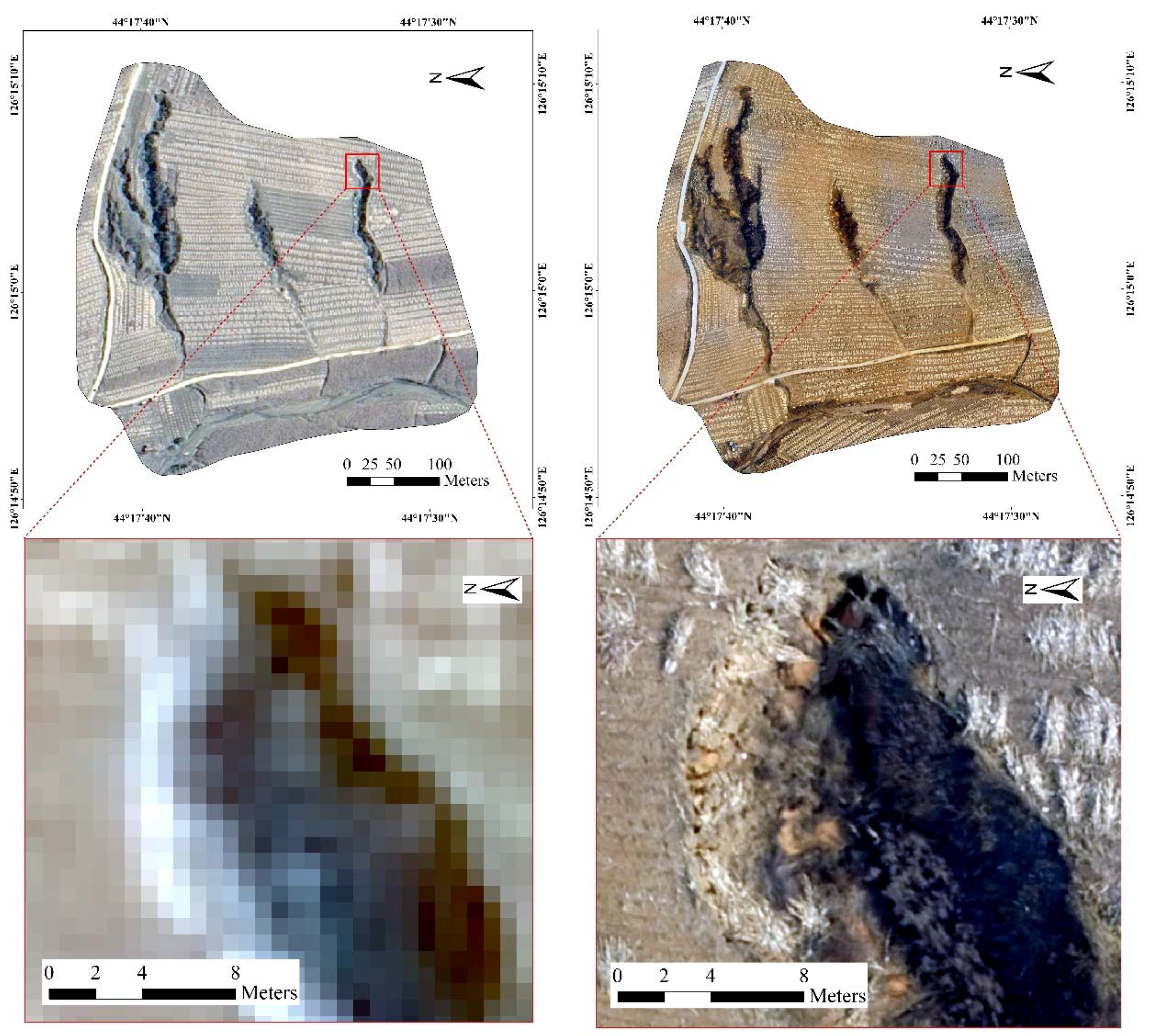
4.2. High-Resolution Ortho-Image Mosaic and DSM of a Small Site
5. Discussion
5.1. Visual Pleiades Imagery Interpretation for Gully Erosion Mapping
5.2. Assessment of UAV Remote Sensing and 3D Reconstruction
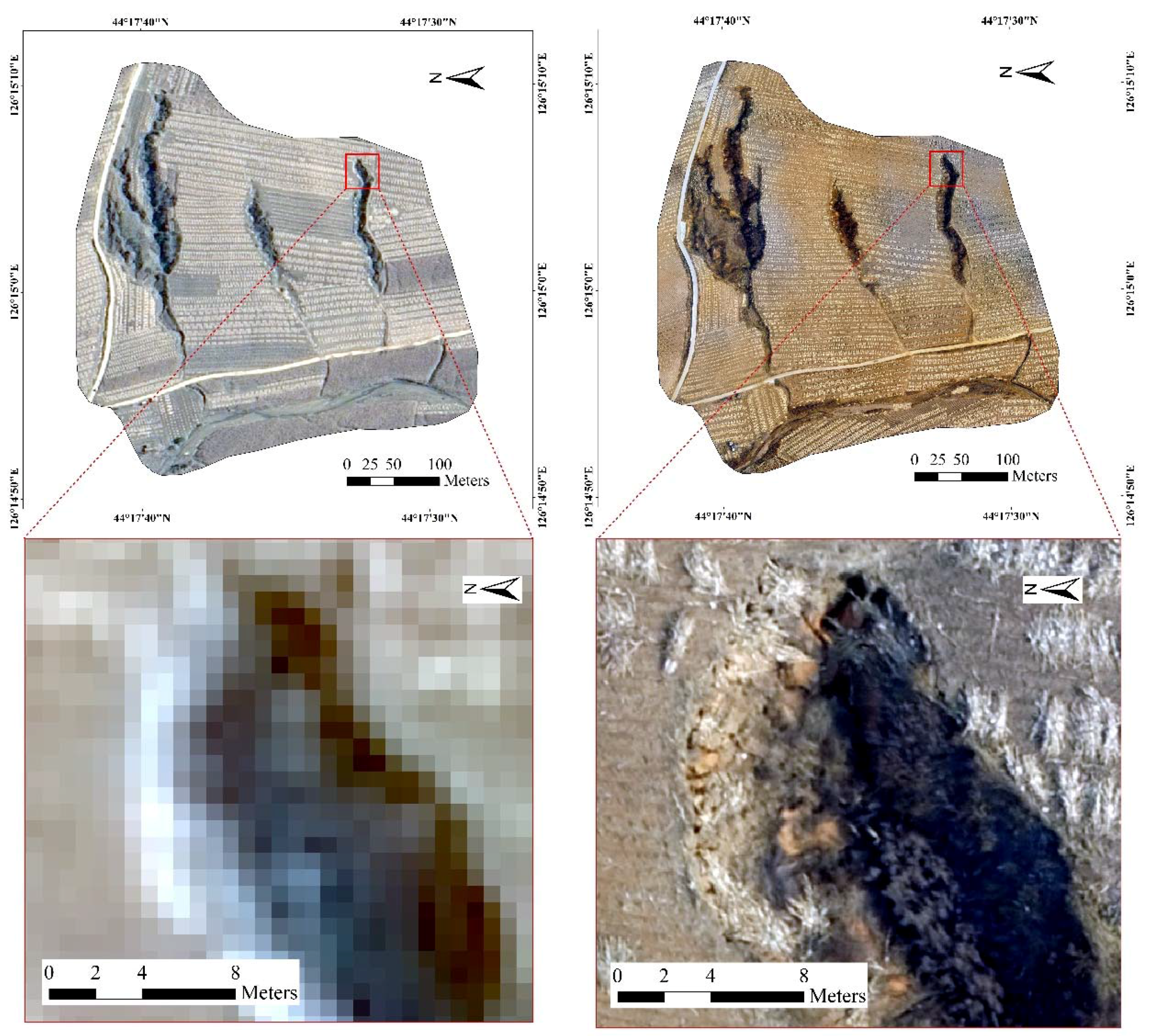
5.3. Comparison and Combination of Satellite Imagery and UAV Remote Sensing
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Luffman, I.E.; Nandi, A.; Spiegel, T. Gully morphology, hillslope erosion, and precipitation characteristics in the Appalachian Valley and Ridge province, southeastern USA. Catena 2015, 133, 221–232. [Google Scholar] [CrossRef]
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Liu, B.; Yan, B.; Shen, B.; Wang, Z.; Wei, X. Current status and comprehensive control strategies of soil erosion for cultivated land in the northeastern black soil area of China. Sci. Soil Water Conserv. 2008, 6, 1–8. (In Chinese) [Google Scholar]
- Hu, G.; Wu, Y.; Liu, B.; Yu, Z.; You, Z.; Zhang, Y. Short-term gully retreat rates over rolling hill areas in black soil of Northeast China. Catena 2007, 71, 321–329. [Google Scholar] [CrossRef]
- Zhang, S.; Li, F.; Li, T.; Yang, J.; Bu, K.; Chang, L.; Wang, W.; Yan, Y. Remote sensing monitoring of gullies on a regional scale: A case study of Kebai region in Heilongjiang Province, China. Chin. Geogr. Sci. 2015, 25, 602–611. [Google Scholar] [CrossRef]
- Kakembo, V.; Rowntree, K.M. The relationship between land use and soil erosion in the communal lands near Peddie town, Eastern Cape, South Africa. Land Degrad. Dev. 2003, 14, 39–49. [Google Scholar] [CrossRef]
- Gomez-Gutierrez, A.; Conoscenti, C.; Angileri, S.E.; Rotigliano, E.; Schnabel, S. Using topographical attributes to evaluate gully erosion proneness (susceptibility) in two Mediterranean basins: Advantages and limitations. Nat. Hazards 2015, 79, S291–S314. [Google Scholar] [CrossRef]
- Roux, N.M.; Le, J.J. Gully location mapping at a national scale for South Africa. S. Afr. Geogr. J. 2012, 94, 208–218. [Google Scholar]
- Eustace, A.H.; Pringle, M.J.; Denham, R.J. A risk map for gully locations in central Queensland, Australia. Eur. J. Soil Sci. 2011, 62, 431–441. [Google Scholar] [CrossRef]
- Yan, Y.C.; Zhang, S.W.; Yue, S.P. Application of corona and spot imagery on erosion gully research in typical black soil regions of Northeast China. Resour. Sci. 2006, 27, 650–656. (In Chinese) [Google Scholar]
- Perroy, R.L.; Bookhagen, B.; Asner, G.P.; Chadwick, O.A. Comparison of gully erosion estimates using airborne and ground-based LiDAR on Santa Cruz Island, California. Geomorphology 2010, 118, 288–300. [Google Scholar] [CrossRef]
- Wu, Y.; Zheng, Q.; Zhang, Y.; Liu, B.; Cheng, H.; Wang, Y. Development of gullies and sediment production in the black soil region of Northeastern China. Geomorphology 2008, 101, 683–691. [Google Scholar] [CrossRef]
- Casali, J.; Loizu, J.; Campo, M.A.; De Santisteban, L.M.; Alvarez-Mozos, J. Accuracy of methods for field assessment of rill and ephemeral gully erosion. Catena 2006, 67, 128–138. [Google Scholar] [CrossRef]
- Castillo, C.; Perez, R.; James, M.R.; Quinton, J.N.; Taguas, E.V.; Gomez, J.A. Comparing the accuracy of several field methods for measuring gully erosion. Soil Sci. Soc. Am. J. 2012, 76, 1319–1332. [Google Scholar] [CrossRef]
- Ionita, I. Gully development in the Moldavian Plateau of Romania. Catena 2006, 68, 133–140. [Google Scholar] [CrossRef]
- Wu, Y.; Cheng, H. Monitoring of gully erosion on the Loess Plateau of China using a global positioning system. Catena 2005, 63, 154–166. [Google Scholar] [CrossRef]
- Hu, G.; Wu, Y.Q.; Liu, B.Y.; Zhang, Y.G.; You, Z.M.; Yu, Z.T. The characteristics of gully erosion over rolling hilly black soil areas of Northeast China. J. Geogr. Sci. 2009, 19, 309–320. [Google Scholar] [CrossRef]
- Vandekerckhove, L.; Poesen, J.; Govers, G. Medium-term gully headcut retreat rates in Southeast Spain determined from aerial photographs and ground measurements. Catena 2003, 50, 329–352. [Google Scholar] [CrossRef]
- Bouchnak, H.; Felfoul, M.S.; Boussema, M.R.; Snane, M.H. Slope and rainfall effects on the volume of sediment yield by gully erosion in the Souar lithologic formation (Tunisia). Catena 2009, 78, 170–177. [Google Scholar] [CrossRef]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using LiDAR data to map gullies and headwater streams under forest canopy: South Carolina, USA. Catena 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Jackson, T.J.; Ritchie, J.C.; White, J.; Leschack, L. Airborne laser profile data for measuring ephemeral gully erosion. Photogramm. Eng. Remote Sens. 1988, 54, 1181–1185. [Google Scholar]
- Armston, J.; Disney, M.; Lewis, P.; Scarth, P.; Phinn, S.; Lucas, R.; Bunting, P.; Goodwin, N. Direct retrieval of canopy gap probability using airborne waveform LiDAR. Remote Sens. Environ. 2013, 134, 24–38. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Armston, J.; Stiller, I.; Muir, J. Assessing the repeatability of terrestrial laser scanning for monitoring gully topography: A case study from Aratula, Queensland, Australia. Geomorphology 2016, 262, 24–36. [Google Scholar] [CrossRef]
- Kociuba, W.; Janicki, G.; Rodzik, J. 3D laser scanning as a new tool of assessment of erosion rates in forested loess gullies (case study: Kolonia Celejów, Lublin Upland). Ann. UMCS 2014, 69, 107–116. [Google Scholar] [CrossRef]
- Kociuba, W.; Kubisz, W.; Zagorski, P. Use of terrestrial laser scanning (TLS) for monitoring and modelling of geomorphic processes and phenomena at a small and medium spatial scale in polar environment (Scott River—Spitsbergen). Geomorphology 2014, 212, 84–96. [Google Scholar] [CrossRef]
- Li, H.; Zhang, X.; Liu, S.; Yury, K.; Kateryna, I.; Li, X.; Chen, Q. Evolvement of gully erosion in village scale in the typical black soil area. Sci. Soil Water Conserv. 2012, 10, 21–28. (In Chinese) [Google Scholar]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens.-Basel 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Marzolff, I.; Poesen, J. The potential of 3d gully monitoring with GIS using high-resolution aerial photography and a digital photogrammetry system. Geomorphology 2009, 111, 48–60. [Google Scholar] [CrossRef]
- Ries, J.B.; Marzolff, I. Monitoring of gully erosion in the Central Ebro Basin by large-scale aerial photography taken from a remotely controlled blimp. Catena 2003, 50, 309–328. [Google Scholar] [CrossRef]
- Hugenholtz, C.H.; Whitehead, K.; Brown, O.W.; Barchyn, T.E.; Moorman, B.J.; LeClair, A.; Riddell, K.; Hamilton, T. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model. Geomorphology 2013, 194, 16–24. [Google Scholar] [CrossRef]
- Haas, F.; Hilger, L.; Neugirg, F.; Umstädter, K.; Breitung, C.; Fischer, P.; Hilger, P.; Heckmann, T.; Dusik, J.; Kaiser, A. Quantification and analysis of geomorphic processes on a recultivated iron ore mine on the Italian island Elba using long-time ground-based LiDAR and photogrammetric data by an UAV. Nat. Hazards Earth Syst. Sci. 2015, 3, 6271–6319. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Eisank, C.; Dragut, L.; Blaschke, T. An object-based workflow to extract landforms at multiple scales from two distinct data types. IEEE Geosci. Remote Sens. 2013, 10, 947–951. [Google Scholar] [CrossRef]
- Peter, K.D.; d’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Hssaine, A.A. Soil erosion in gully catchments affected by land-levelling measures in the Souss Basin, Morocco, analysed by rainfall simulation and UAV remote sensing data. Catena 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Stocker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetry—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo tourism: Exploring photo collections in 3D. ACM Trans. Graph. 2006, 25, 835–846. [Google Scholar] [CrossRef]
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multiview stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 32, 1362–1376. [Google Scholar] [CrossRef] [PubMed]
- Castillo, C.; James, M.R.; Redelmacías, M.D.; Pérez, R.; Gómez, J.A. SF3M software: 3-D photo-reconstruction for non-expert users and its application to a gully network. Soil 2015, 1, 583–594. [Google Scholar] [CrossRef]
- Gomez-Gutierrez, A.; Schnabel, S.; Berenguer-Sempere, F.; Lavado-Contador, F.; Rubio-Delgado, J. Using 3D photo-reconstruction methods to estimate gully headcut erosion. Catena 2014, 120, 91–101. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P.; Maas, H.G.; Faust, D. Multi-temporal UAV data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Process. Landf. 2015, 40, 741–755. [Google Scholar] [CrossRef]
- Poesen, J. Challenges in gully erosion research. Landf. Anal. 2011, 17, 5–9. [Google Scholar]
- Smith, M.W.; Vericat, D. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from structure-from-motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef]
- King, C.; Baghdadi, N.; Lecomte, V.; Cerdan, O. The application of remote-sensing data to monitoring and modelling of soil erosion. Catena 2005, 62, 79–93. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of gully-affected areas by applying object-based image analysis (OBIA) in the region of Taroudannt, Morocco. Remote Sens.-Basel 2014, 6, 8287–8309. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellan, A. Image-based surface reconstruction in geomorphometry–merits, limits and developments of a promising tool for geoscientists. Image 2015, 3, 1445–1508. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, J.; Chen, Y.; Li, J.; Wang, X. Influence of the varied spatial resolution of remote sensing images on urban and rural residential information extraction. Resour. Sci. 2012, 34, 159–165. (In Chinese) [Google Scholar]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Abdellah, L.; Machmach, I. Quantifying temporal changes in gully erosion areas with object oriented analysis. Catena 2015, 128, 262–277. [Google Scholar] [CrossRef]
- Wang, T.; He, F.H.; Zhang, A.D.; Gu, L.J.; Wen, Y.M.; Jiang, W.G.; Shao, H.B. A quantitative study of gully erosion based on object-oriented analysis techniques: A case study in Beiyanzikou catchment of Qixia, Shandong, China. Sci. World J. 2014, 2014, 417325. [Google Scholar] [CrossRef] [PubMed]
- Hughes, A.O.; Prosser, I.P. Gully erosion prediction across a large region: Murray-Darling Basin, Australia. Soil Res. 2012, 50, 267–277. [Google Scholar] [CrossRef]
- Mousazadeh, F.; Salleh, K.O. The influence of lithology and soil on the occurrence and expansion of gully erosion, Toroud Basin—Iran. Procedia Soc. Behav. Sci. 2014, 120, 749–756. [Google Scholar] [CrossRef]
- Mousazadeh, F.; Salleh, K.O. Factors controlling gully erosion development in Toroud Basin—Iran. Procedia Soc. Behav. Sci. 2014, 120, 506–512. [Google Scholar] [CrossRef]
- Ranzi, R.; Le, T.H.; Rulli, M.C. A RUSLE approach to model suspended sediment load in the Lo river (Vietnam): Effects of reservoirs and land use changes. J. Hydrol. 2012, 422–423, 17–29. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, S.; Fang, H. Coupling mechanism of slope-gully erosion in typical black soil area of Northeast China. J. Nat. Resour. 2012, 27, 2113–2122. (In Chinese) [Google Scholar]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens.-Basel 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Hofle, B.; Griesbaum, L.; Forbriger, M. GIS-based detection of gullies in terrestrial LiDAR data of the Cerro llamoca peatland (Peru). Remote Sens.-Basel 2013, 5, 5851–5870. [Google Scholar] [CrossRef]
- Kociuba, W.; Janicki, G.; Rodzik, J.; Stepniewski, K. Comparison of volumetric and remote sensing methods (TLS) for assessing the development of a permanent forested loess gully. Nat. Hazards 2015, 79, S139–S158. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from unmanned aerial vehicle (UAV) imagery. Remote Sens.-Basel 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Evans, M.; Lindsay, J. High resolution quantification of gully erosion in upland peatlands at the landscape scale. Earth Surf. Process. Landf. 2010, 35, 876–886. [Google Scholar] [CrossRef]
- Wen, L.; Zheng, F.; Shen, H.; Gao, Y. Effects of corn straw mulch buffer in the gully head on gully erosion of sloping cropland in the black soil region of Northeast China. J. Sediment. Res. 2014, 6, 73–80. (In Chinese) [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Gully Appearance | Ground Photos | Pleiades Images |
|---|---|---|
| Gully-1: Ephemeral gully |  |  |
| Gully-2: Small permanent gully |  |  |
| Gully-3: Large permanent gully |  |  |
| Gully-4: Ramified permanent gully |  |  |
| Numbers of Gullies | The Total Length (km) | The Total Area (hm2) | Gully Density of Whole Area (km/km2) | Gully Intensity of Whole Area (m2/km2) |
|---|---|---|---|---|
| 1190 | 224.978 | 89.039 | 1.37 | 5434.84 |
| Validated Gullies | Correct | False | Accuracy of Visual Interpretation |
|---|---|---|---|
| 20 | 18 | 2 | 90% |
| Imagery and Resolution | Georeferencing | Bundle Block Adjustment | |||||
|---|---|---|---|---|---|---|---|
| Images calibrated | Area covered (ha) | GSD (cm) | Number of GCPs | RMSE (X/Y/Z) in (m) | Number of 2D keypoint observations | Number of 3D points | Mean reprojection error (pixels) |
| 255 | 13.85 | 4.42 | 40 | 0.026/0.016/0.024 | 2,622,204 | 899,037 | 0.26 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Zhang, S.; Pu, L.; Yang, J.; Yang, C.; Chen, J.; Guan, C.; Wang, Q.; Chen, D.; Fu, B.; et al. Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China. ISPRS Int. J. Geo-Inf. 2016, 5, 200. https://doi.org/10.3390/ijgi5110200
Wang R, Zhang S, Pu L, Yang J, Yang C, Chen J, Guan C, Wang Q, Chen D, Fu B, et al. Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China. ISPRS International Journal of Geo-Information. 2016; 5(11):200. https://doi.org/10.3390/ijgi5110200
Chicago/Turabian StyleWang, Ranghu, Shuwen Zhang, Luoman Pu, Jiuchun Yang, Chaobin Yang, Jing Chen, Cong Guan, Qing Wang, Dan Chen, Bolin Fu, and et al. 2016. "Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China" ISPRS International Journal of Geo-Information 5, no. 11: 200. https://doi.org/10.3390/ijgi5110200
APA StyleWang, R., Zhang, S., Pu, L., Yang, J., Yang, C., Chen, J., Guan, C., Wang, Q., Chen, D., Fu, B., & Sang, X. (2016). Gully Erosion Mapping and Monitoring at Multiple Scales Based on Multi-Source Remote Sensing Data of the Sancha River Catchment, Northeast China. ISPRS International Journal of Geo-Information, 5(11), 200. https://doi.org/10.3390/ijgi5110200