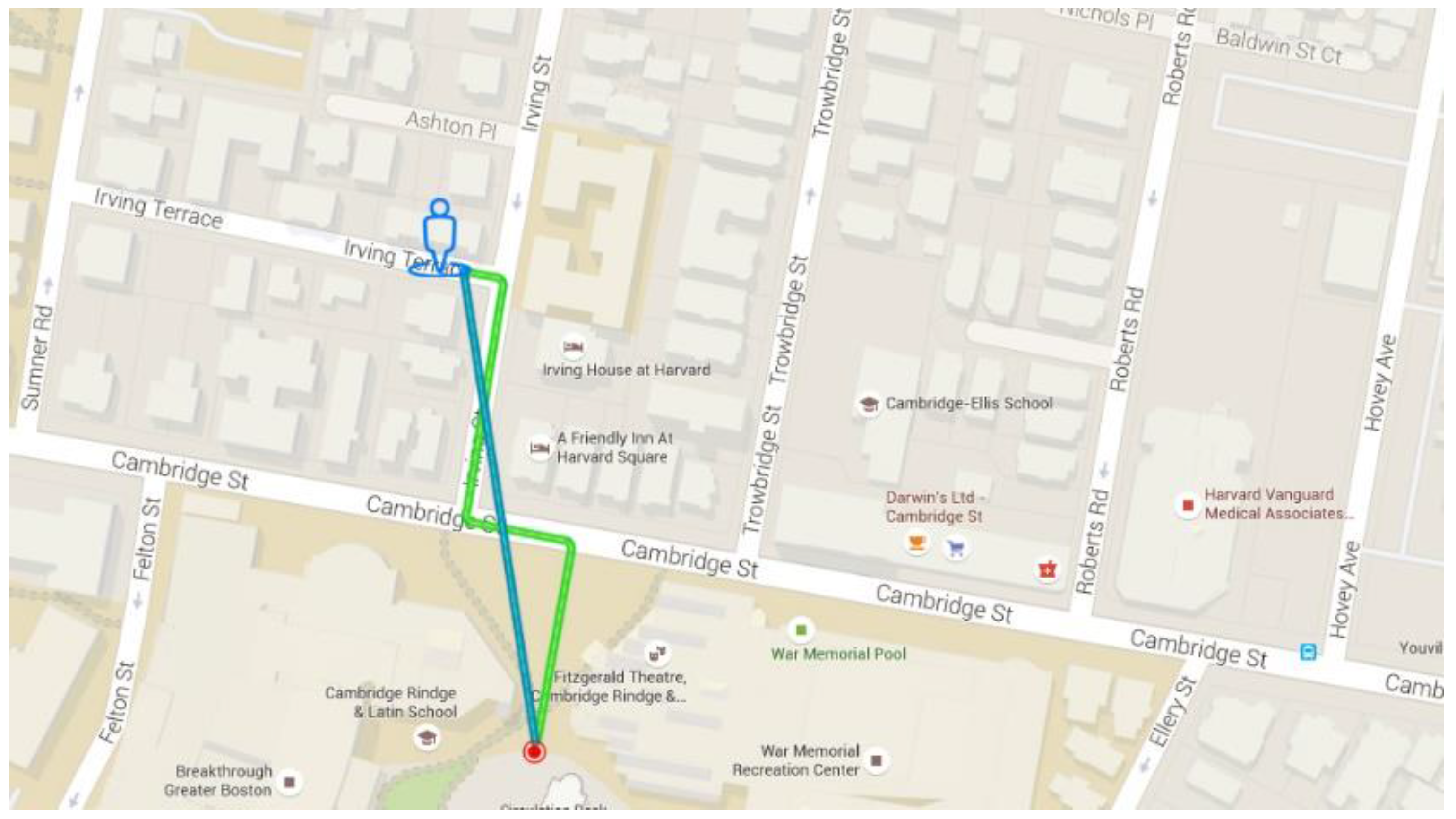
Figure 1.
Euclidean distance and real distance.
Figure 1.
Euclidean distance and real distance.
Figure 2.
Moving object distance in an outdoor space.
Figure 2.
Moving object distance in an outdoor space.
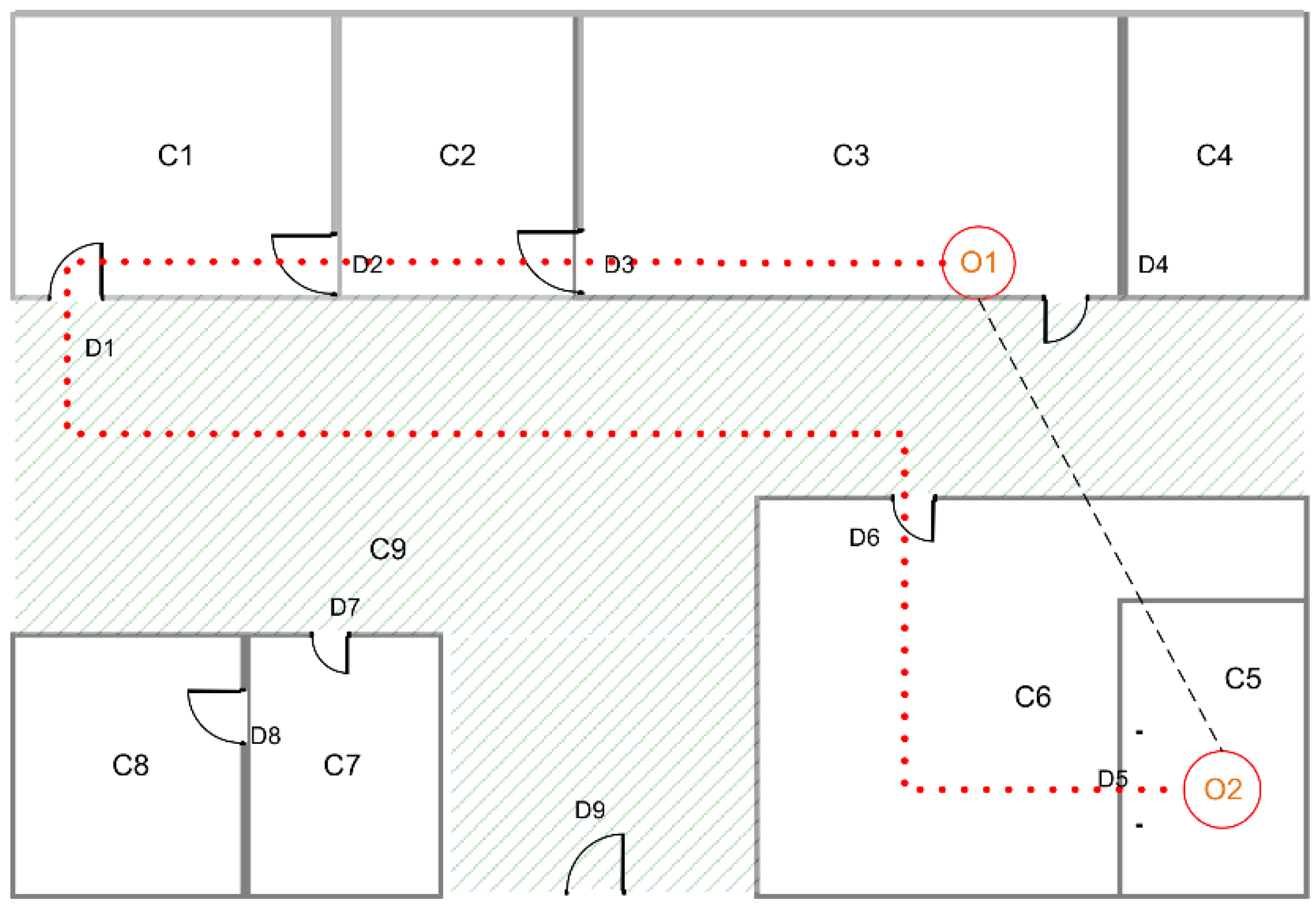
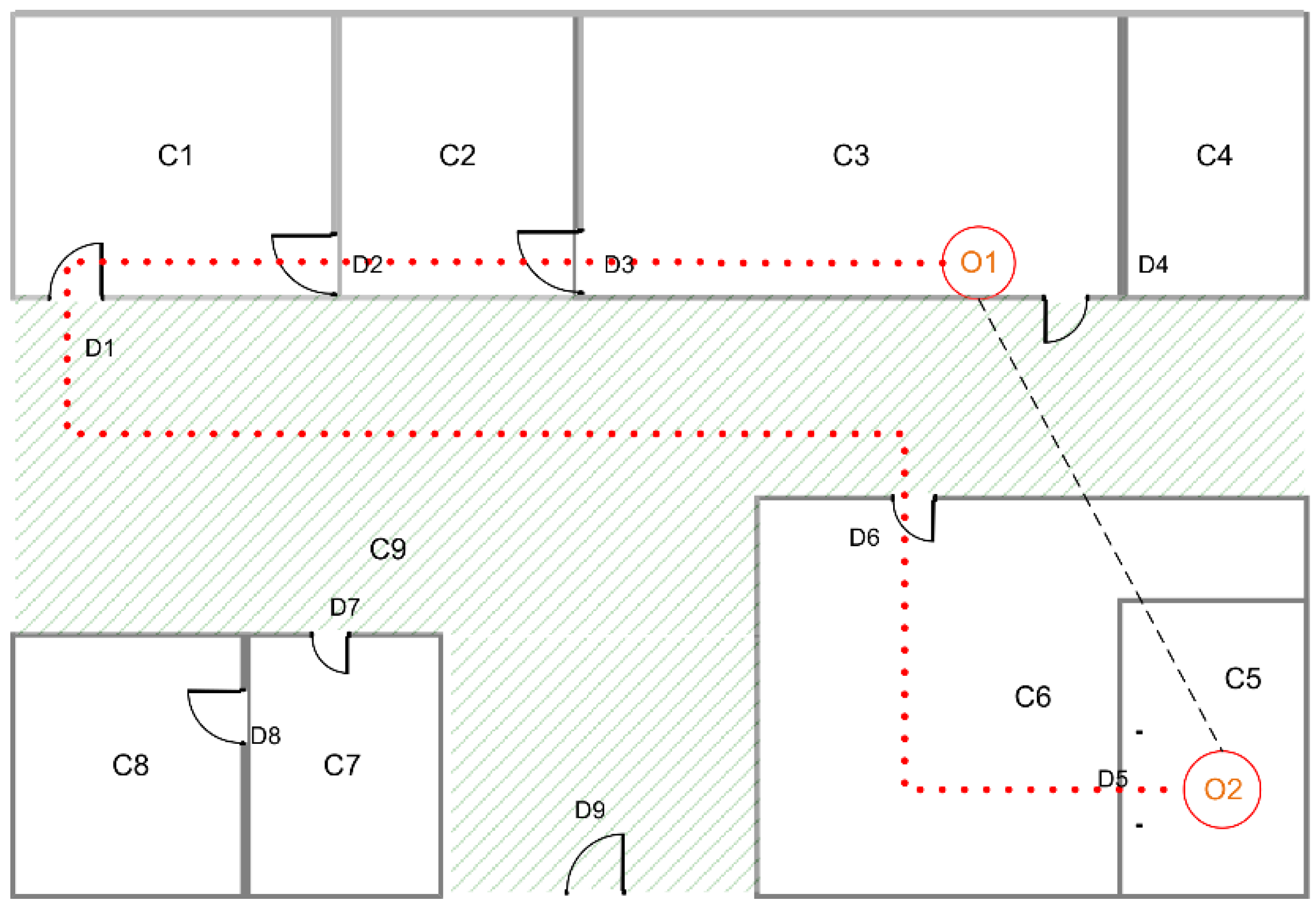
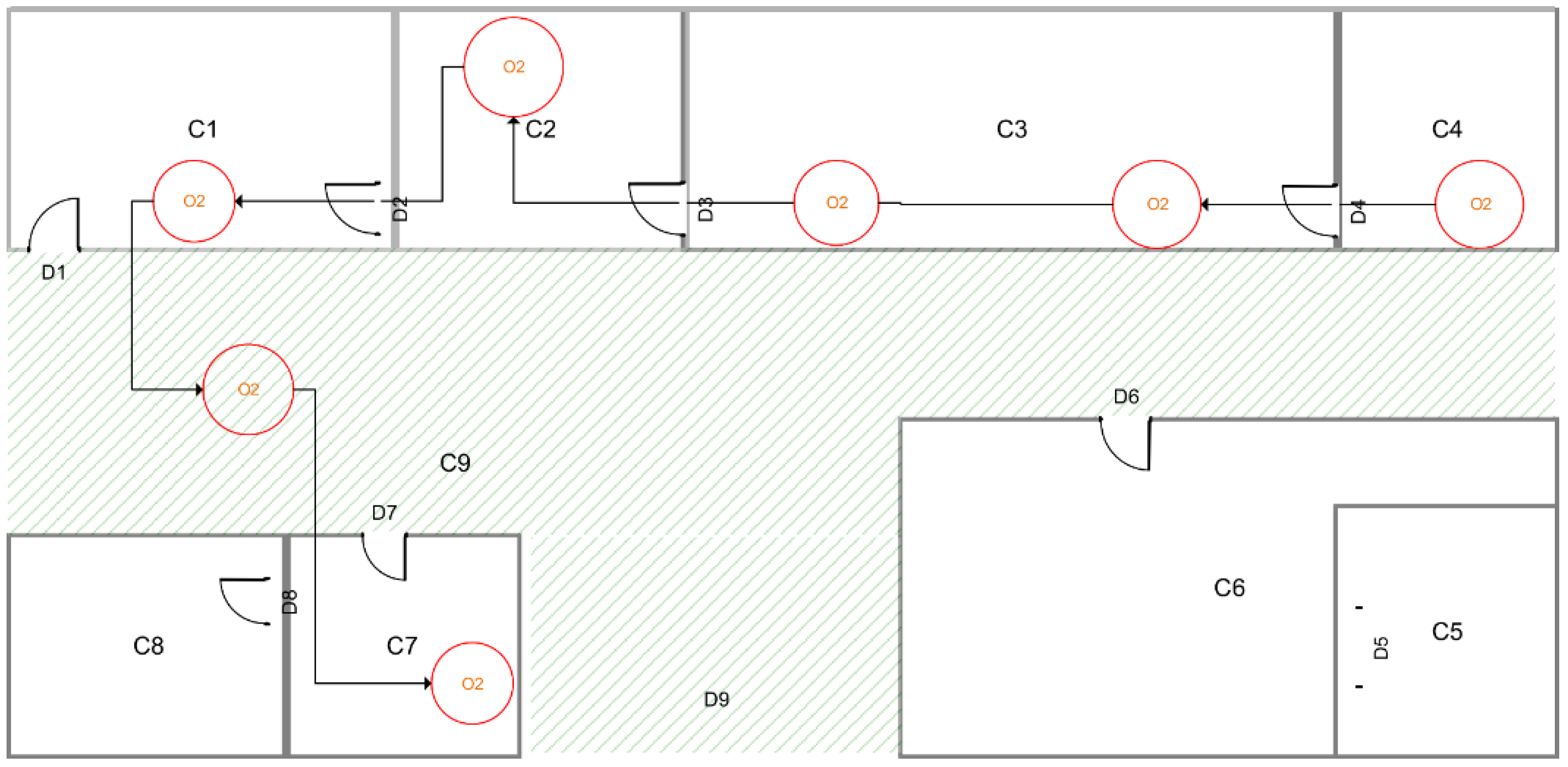
Figure 3.
Record of a moving object’s travel through an indoor space.
Figure 3.
Record of a moving object’s travel through an indoor space.
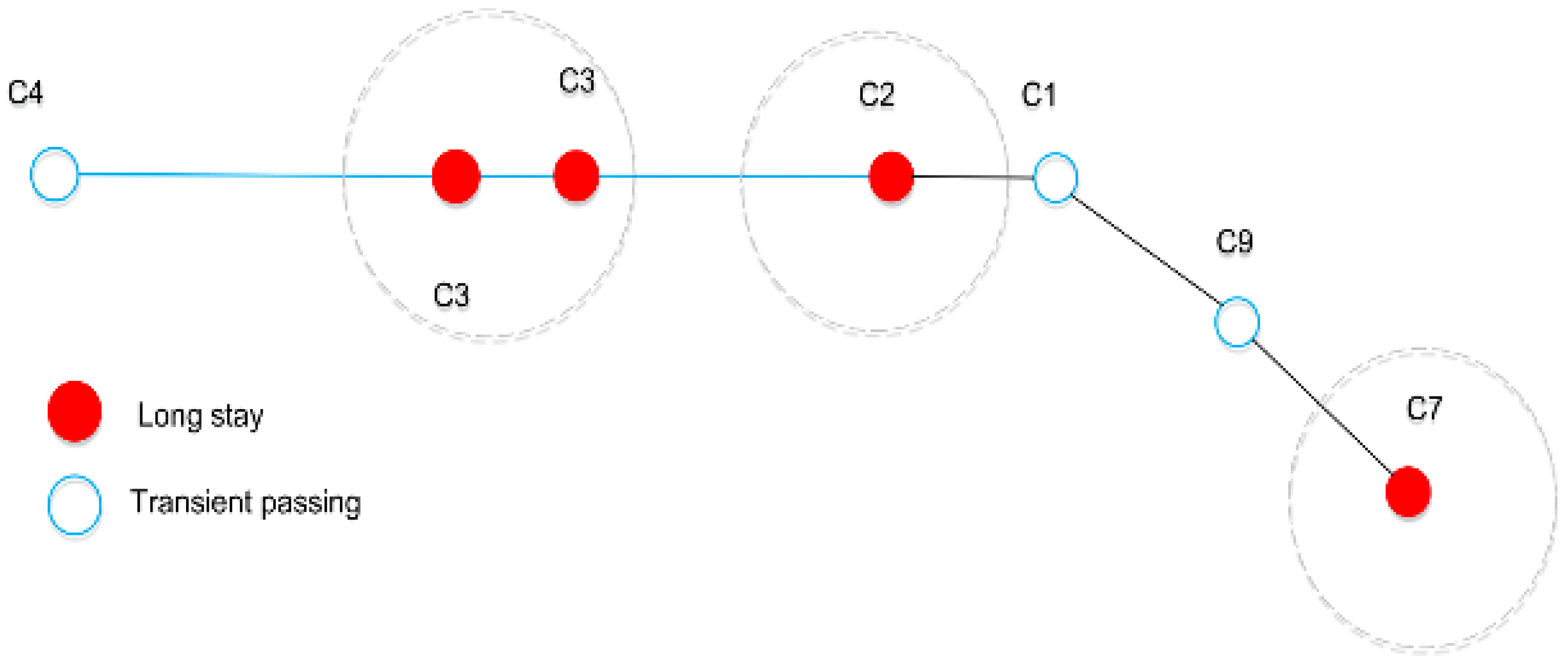
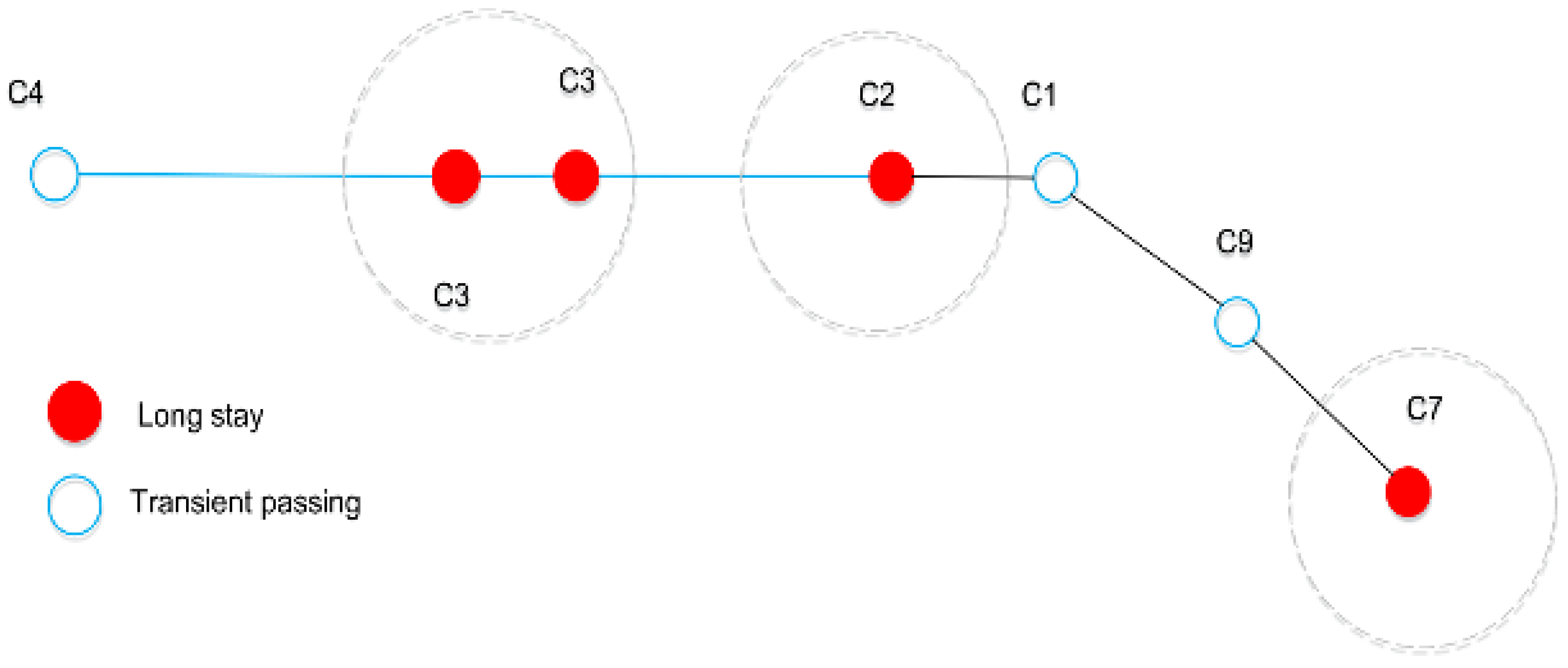
Figure 4.
The sequence of a moving object trajectory.
Figure 4.
The sequence of a moving object trajectory.
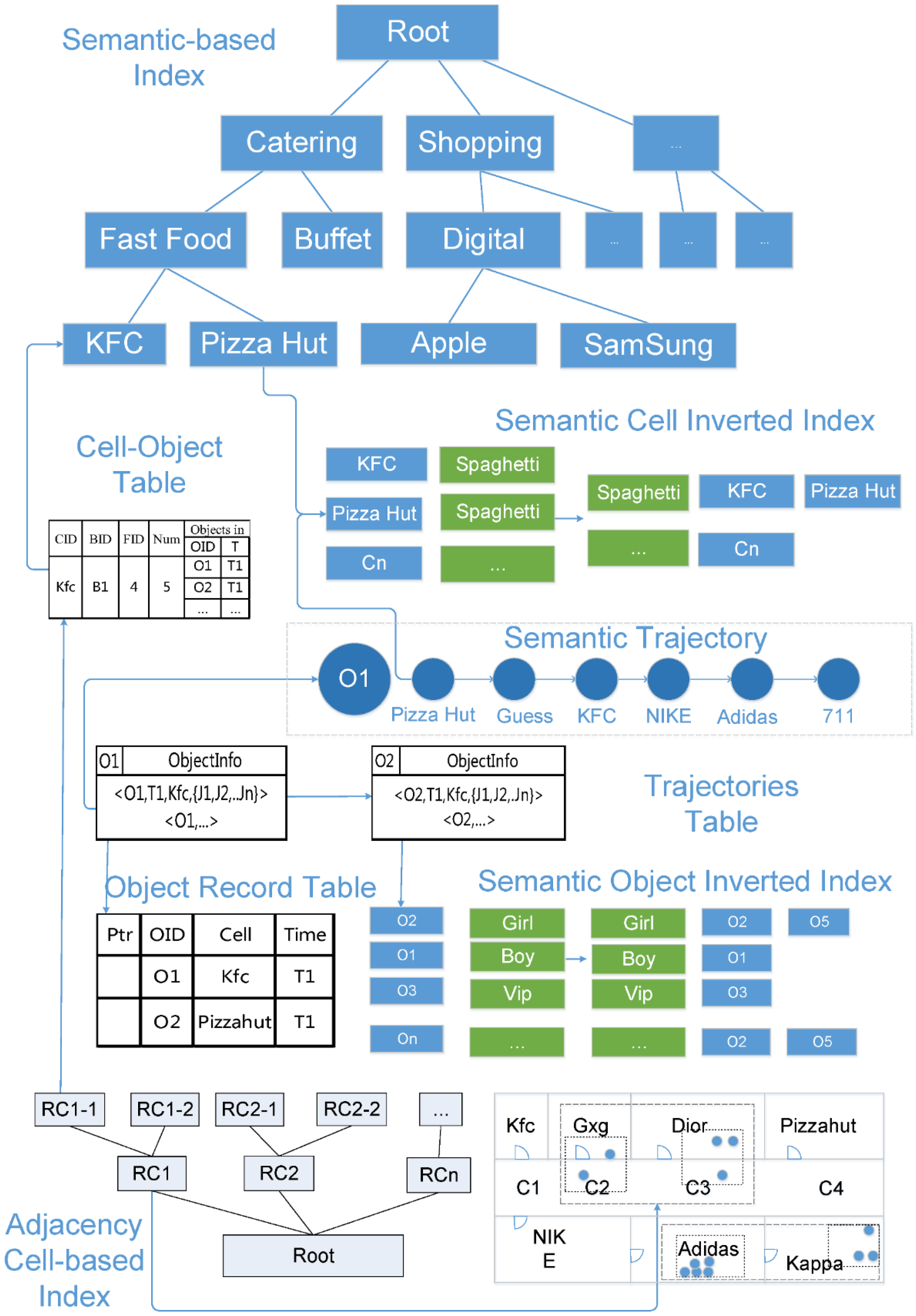
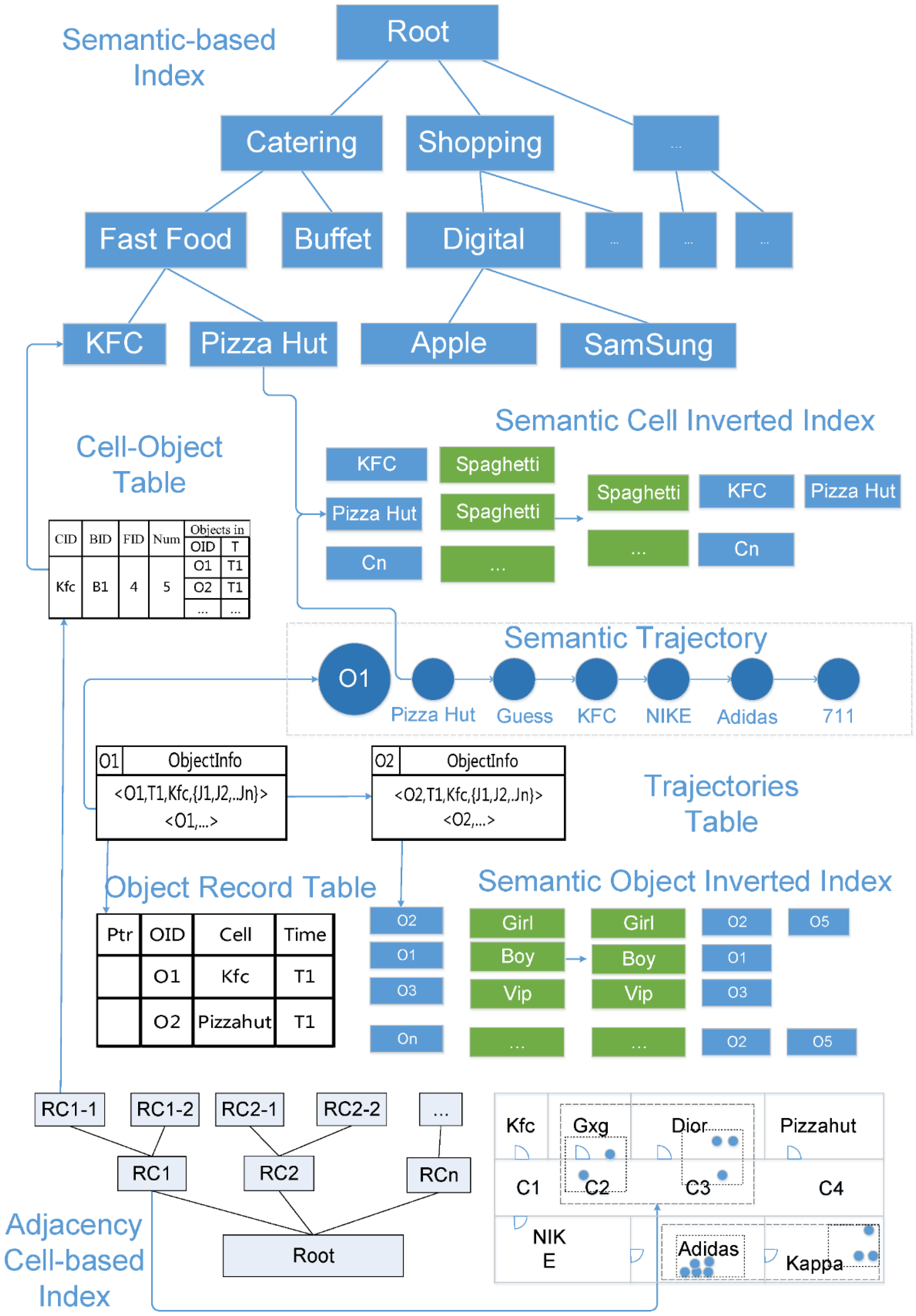
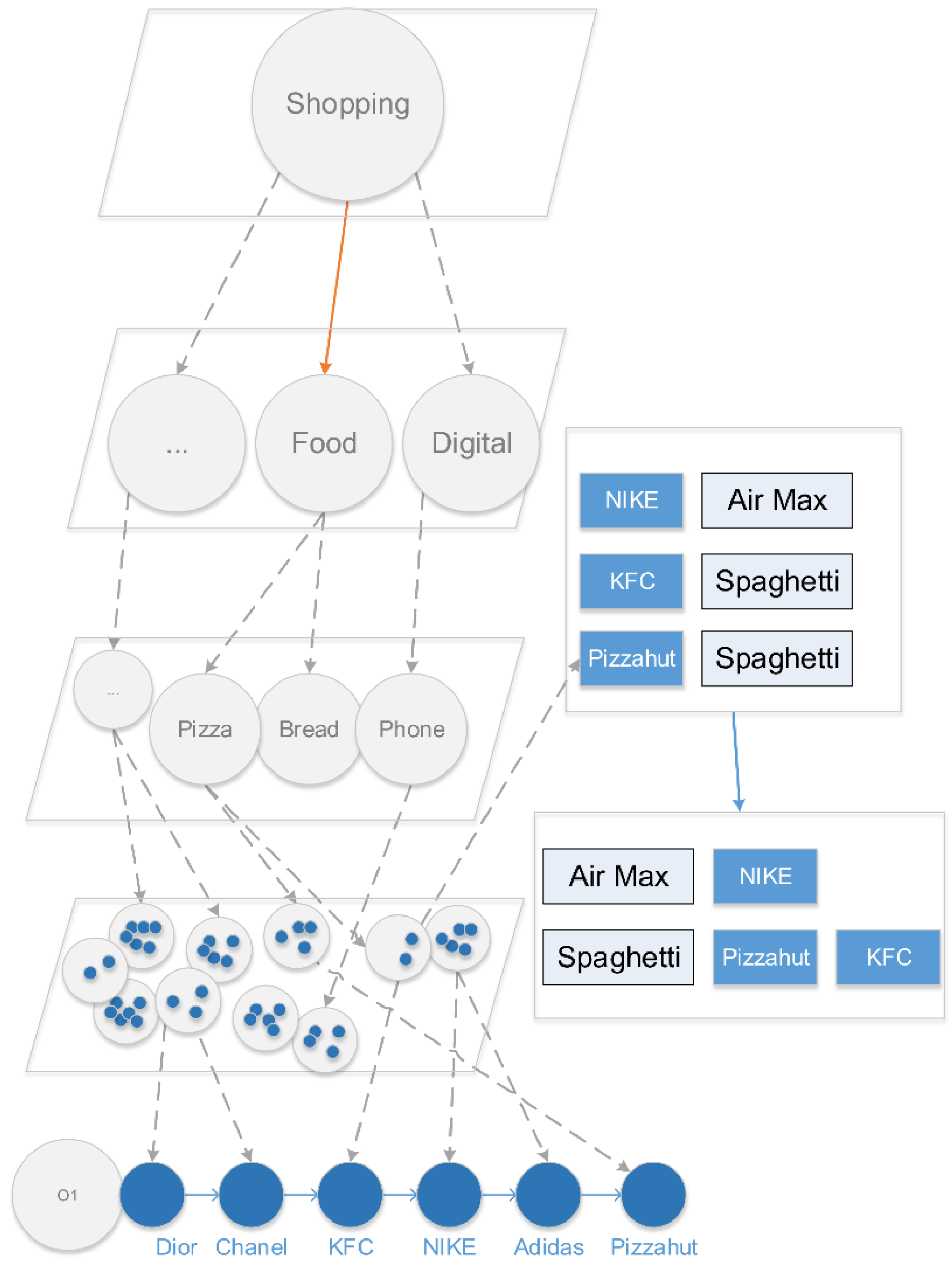
Figure 5.
Overall structure of the MACSItree. Dark backgrounds indicate semantic-related elements.
Figure 5.
Overall structure of the MACSItree. Dark backgrounds indicate semantic-related elements.
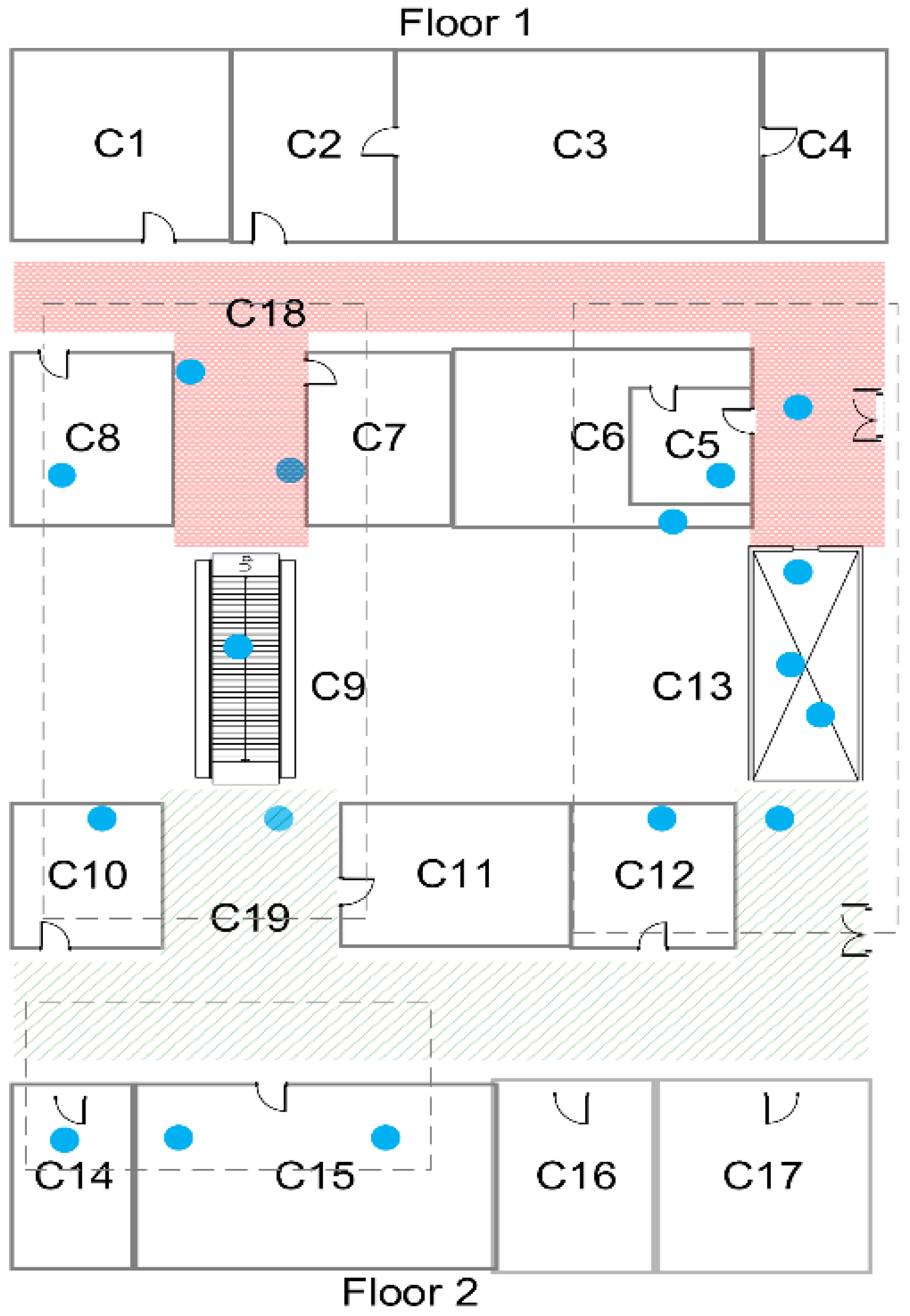
Figure 6.
Indoor cellular space. C9 is the stairwell, C13 is the elevator, and C18 is the hallway. The top view is floor 1, and the bottom view is floor 2.
Figure 6.
Indoor cellular space. C9 is the stairwell, C13 is the elevator, and C18 is the hallway. The top view is floor 1, and the bottom view is floor 2.
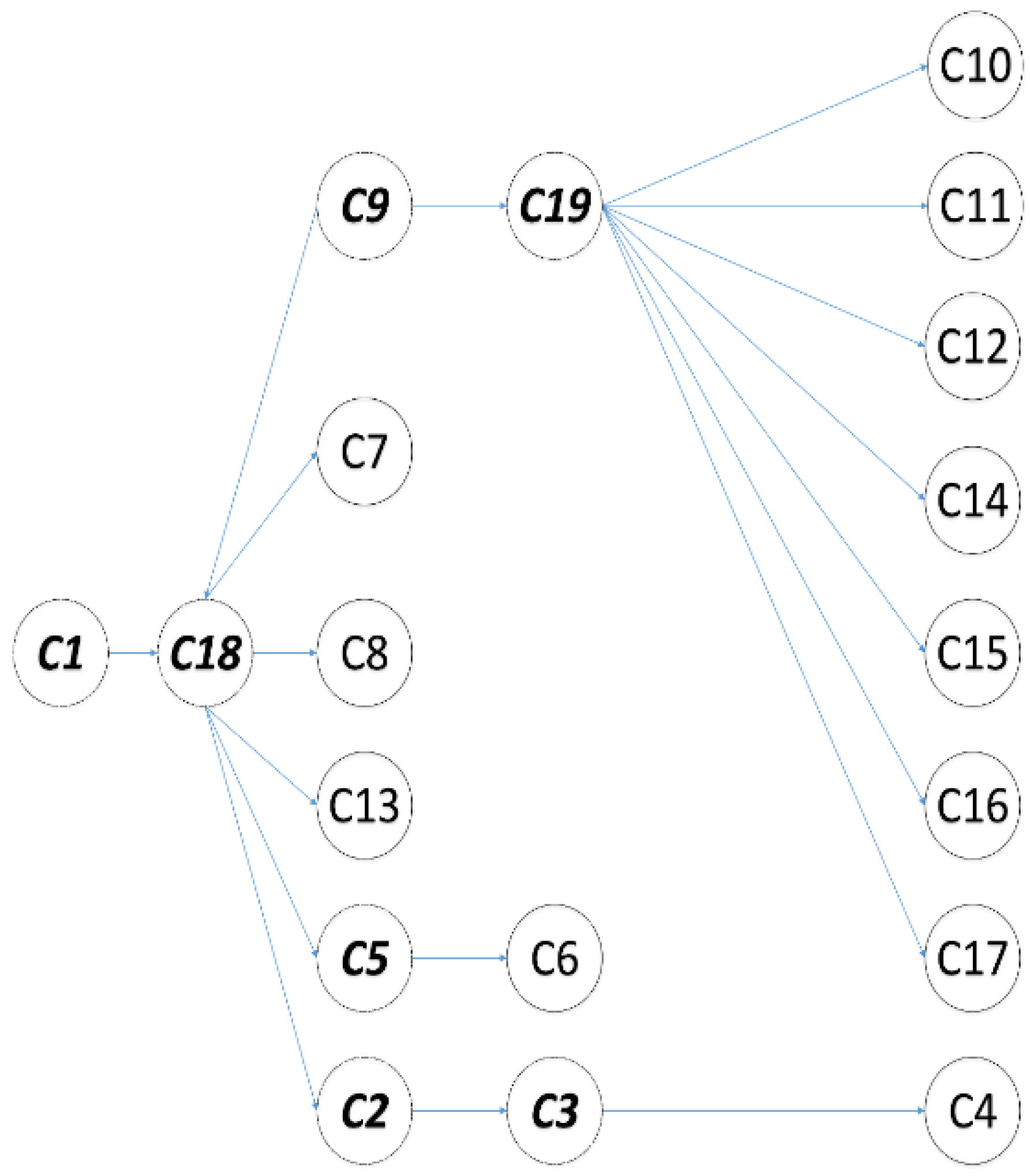
Figure 7.
Expansion algorithm. The points with bold italic numbers are expansion points.
Figure 7.
Expansion algorithm. The points with bold italic numbers are expansion points.
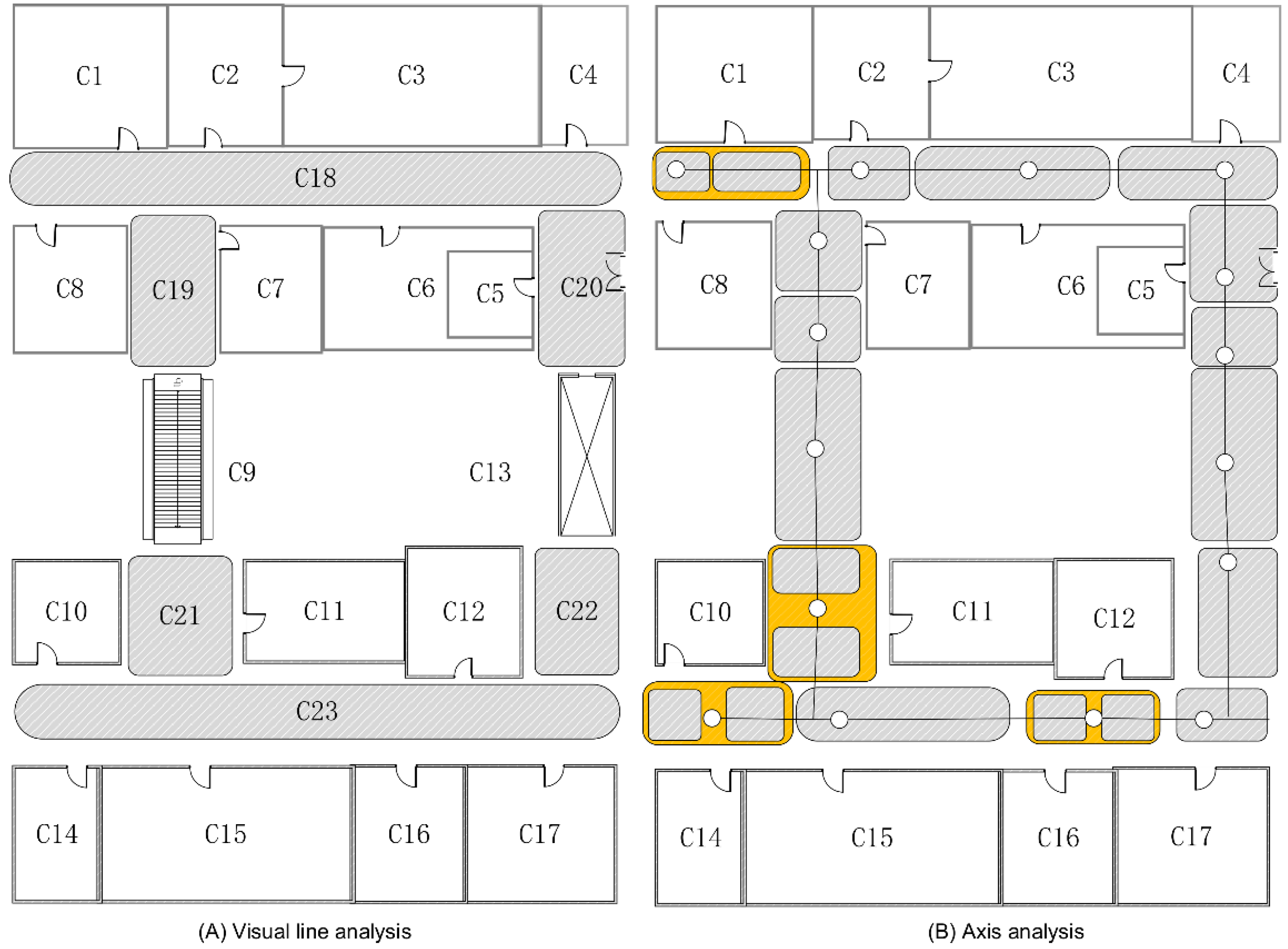
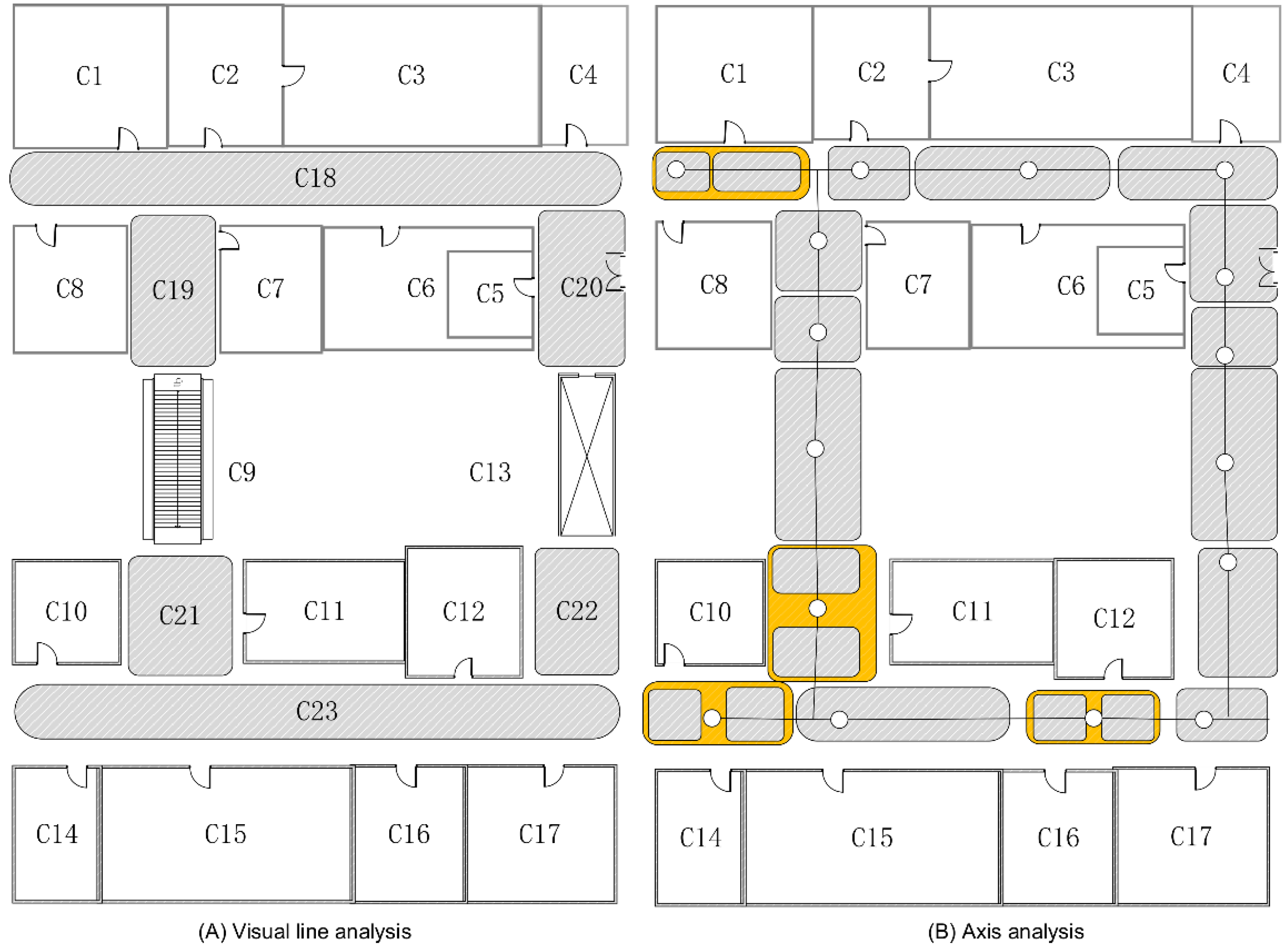
Figure 8.
(A,B) Visual line analysis and axis analysis.
Figure 8.
(A,B) Visual line analysis and axis analysis.
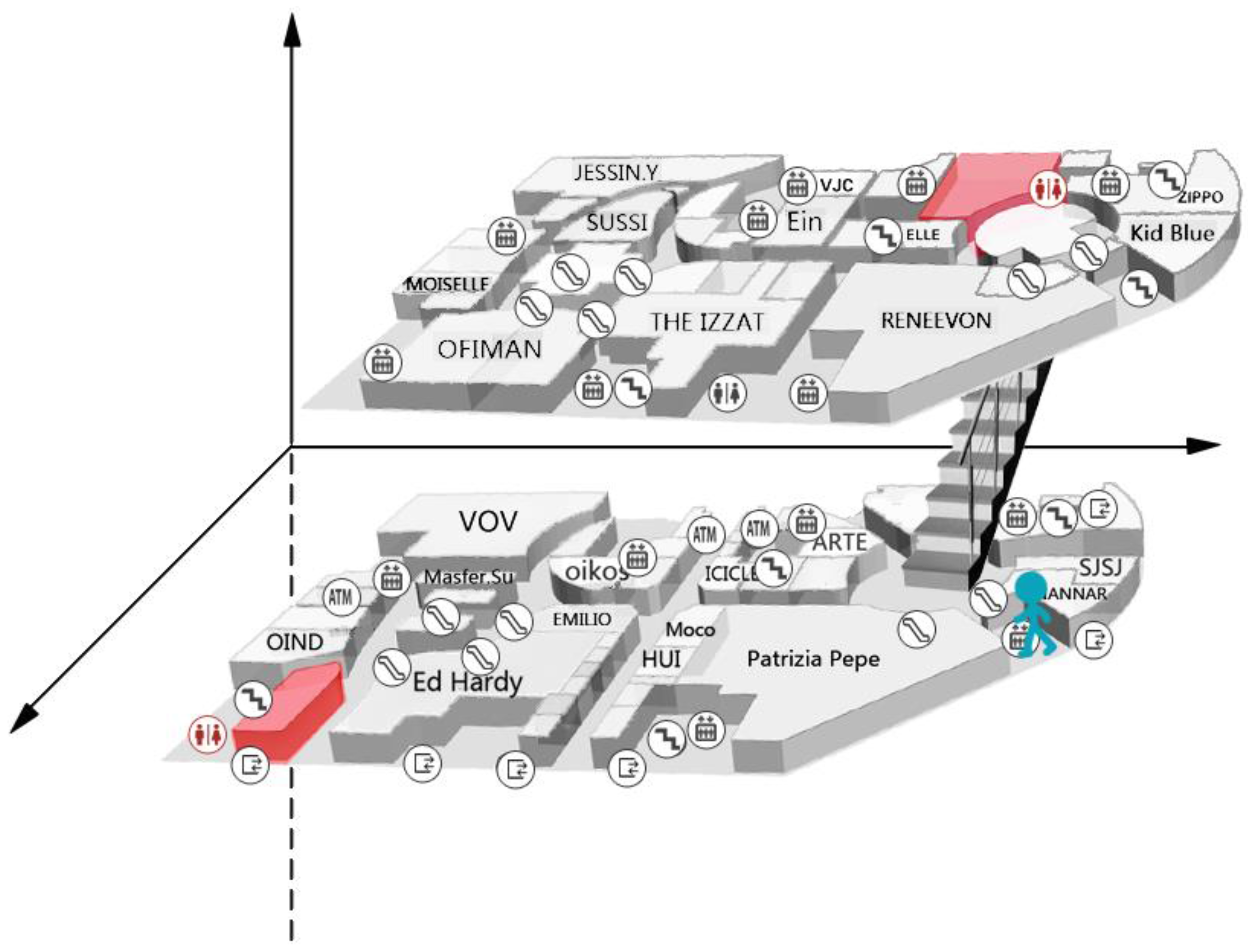
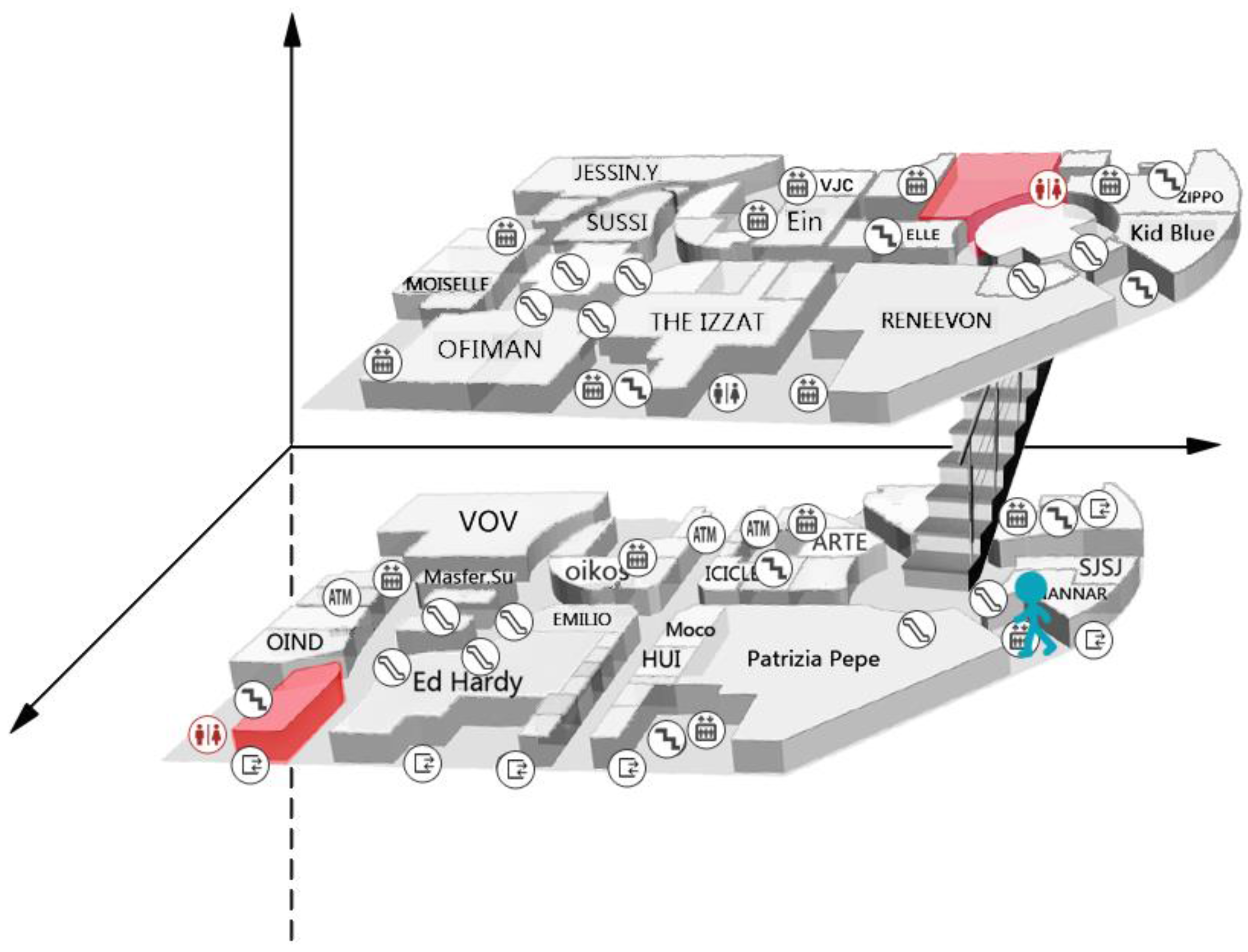
Figure 9.
Multi-floor plane. Red regions denote the toilets, and the blue figure is the moving object.
Figure 9.
Multi-floor plane. Red regions denote the toilets, and the blue figure is the moving object.
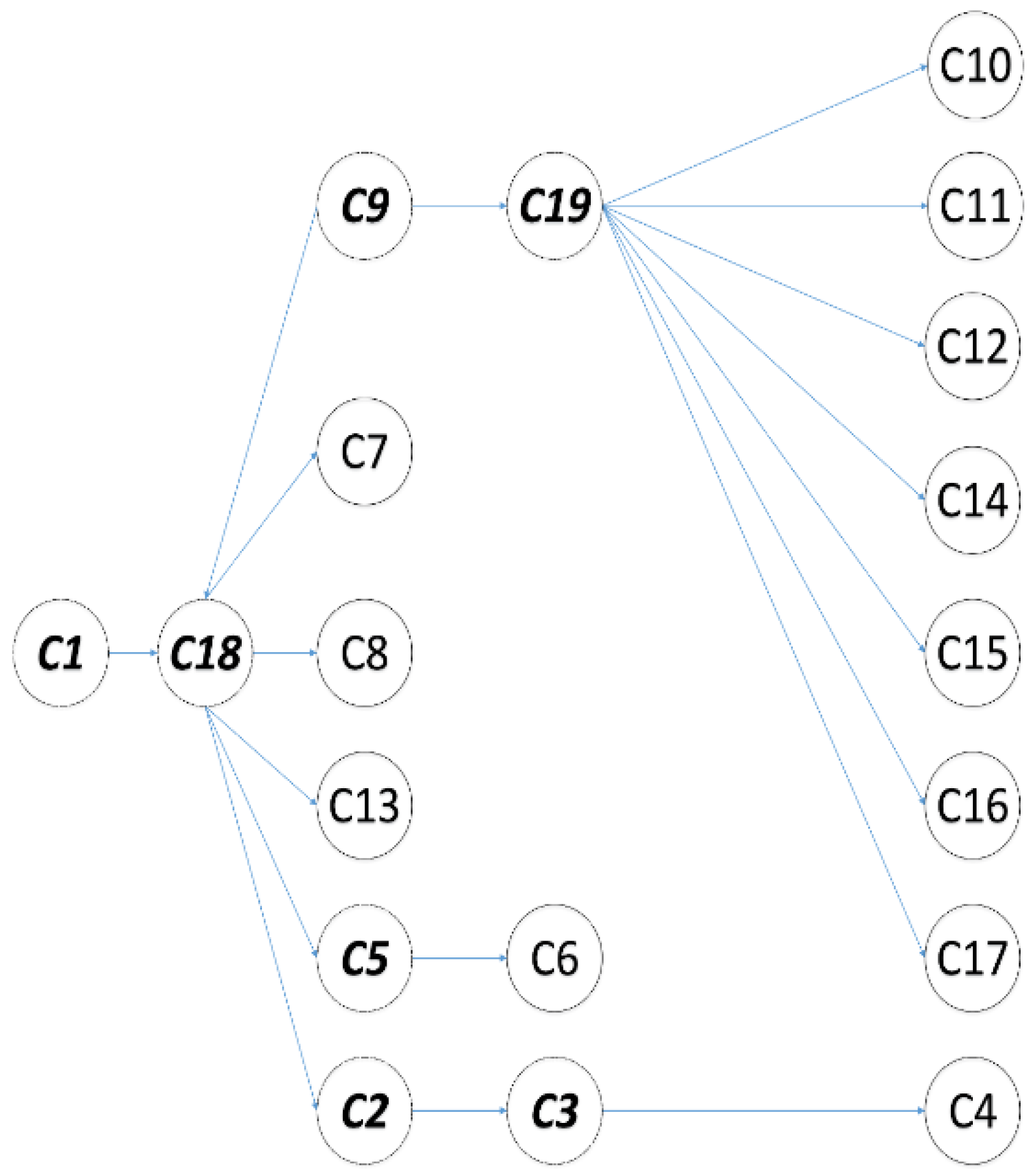
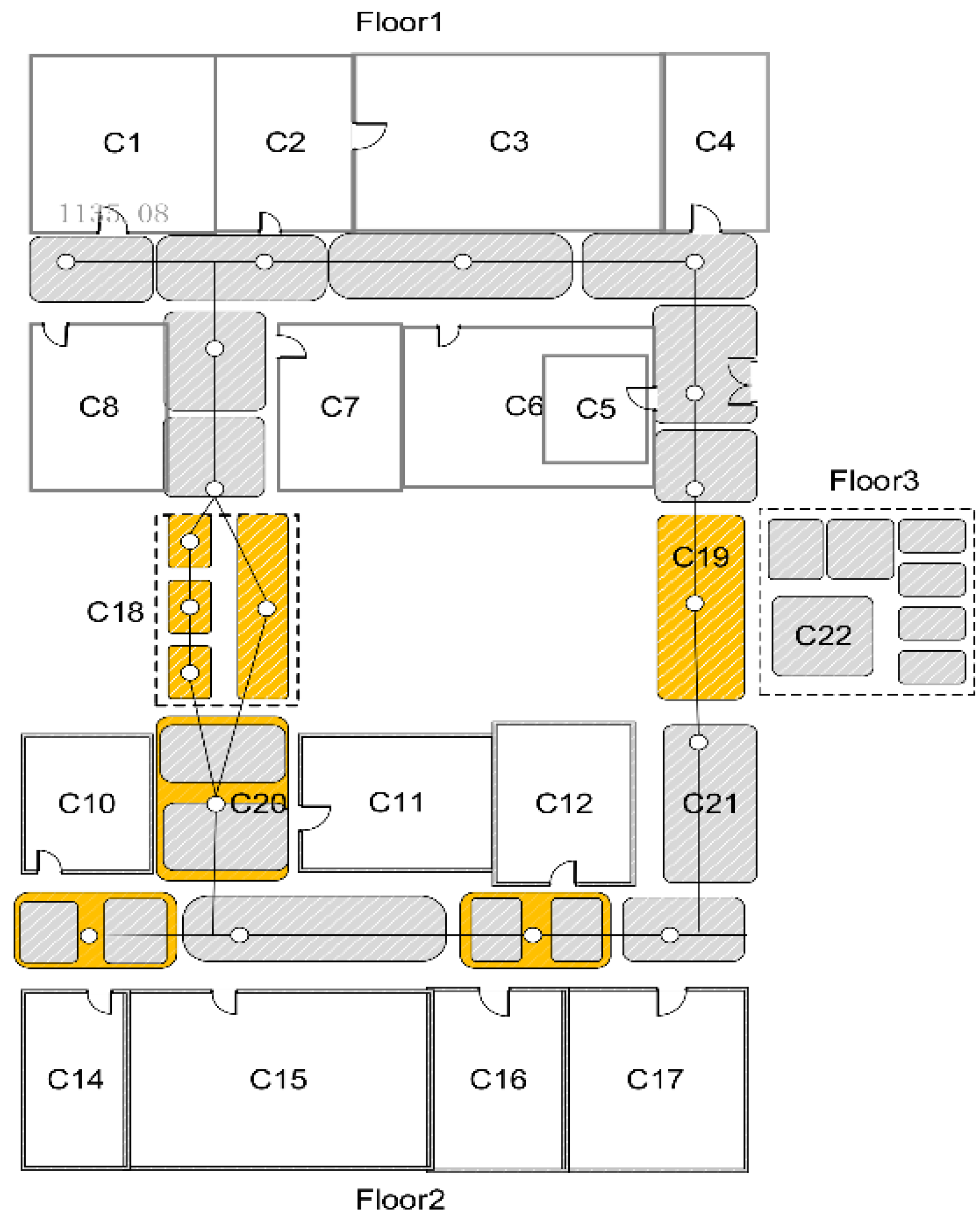
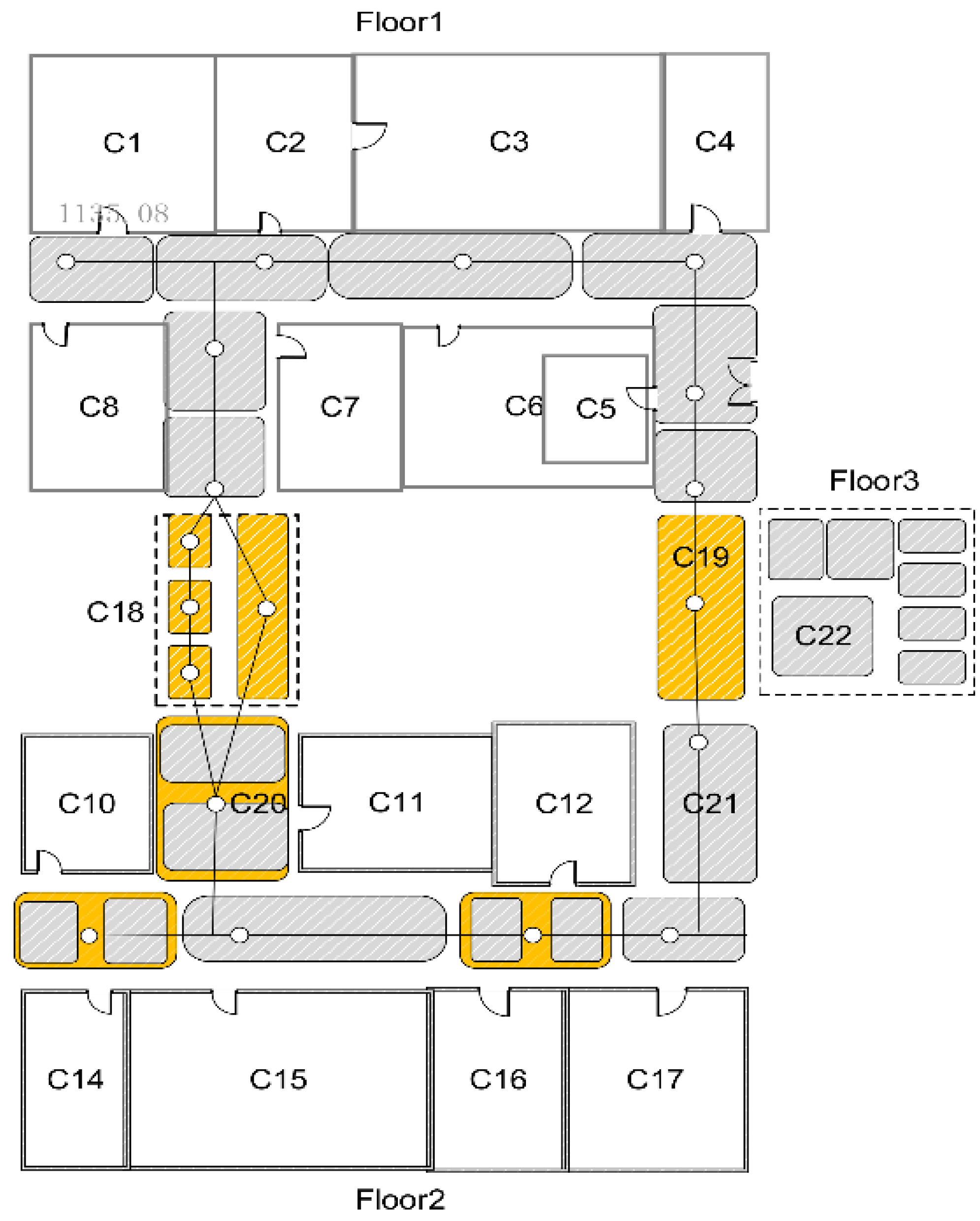
Figure 10.
Multi-floor indoor cellular space.C18 is the stairwell, and C19 is the elevator.
Figure 10.
Multi-floor indoor cellular space.C18 is the stairwell, and C19 is the elevator.
Figure 11.
Multi-granularity semantic hierarchy tree.
Figure 11.
Multi-granularity semantic hierarchy tree.
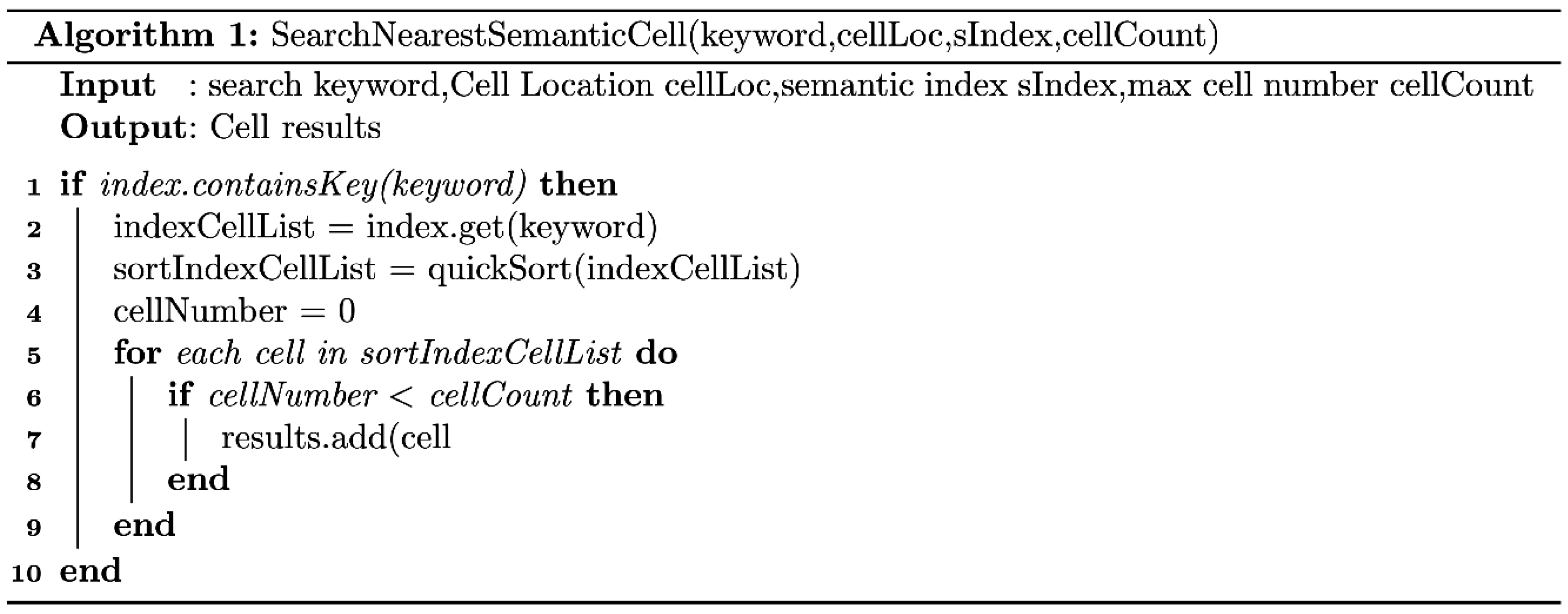
Figure 12.
The algorithm for nearest semantic cell search.
Figure 12.
The algorithm for nearest semantic cell search.
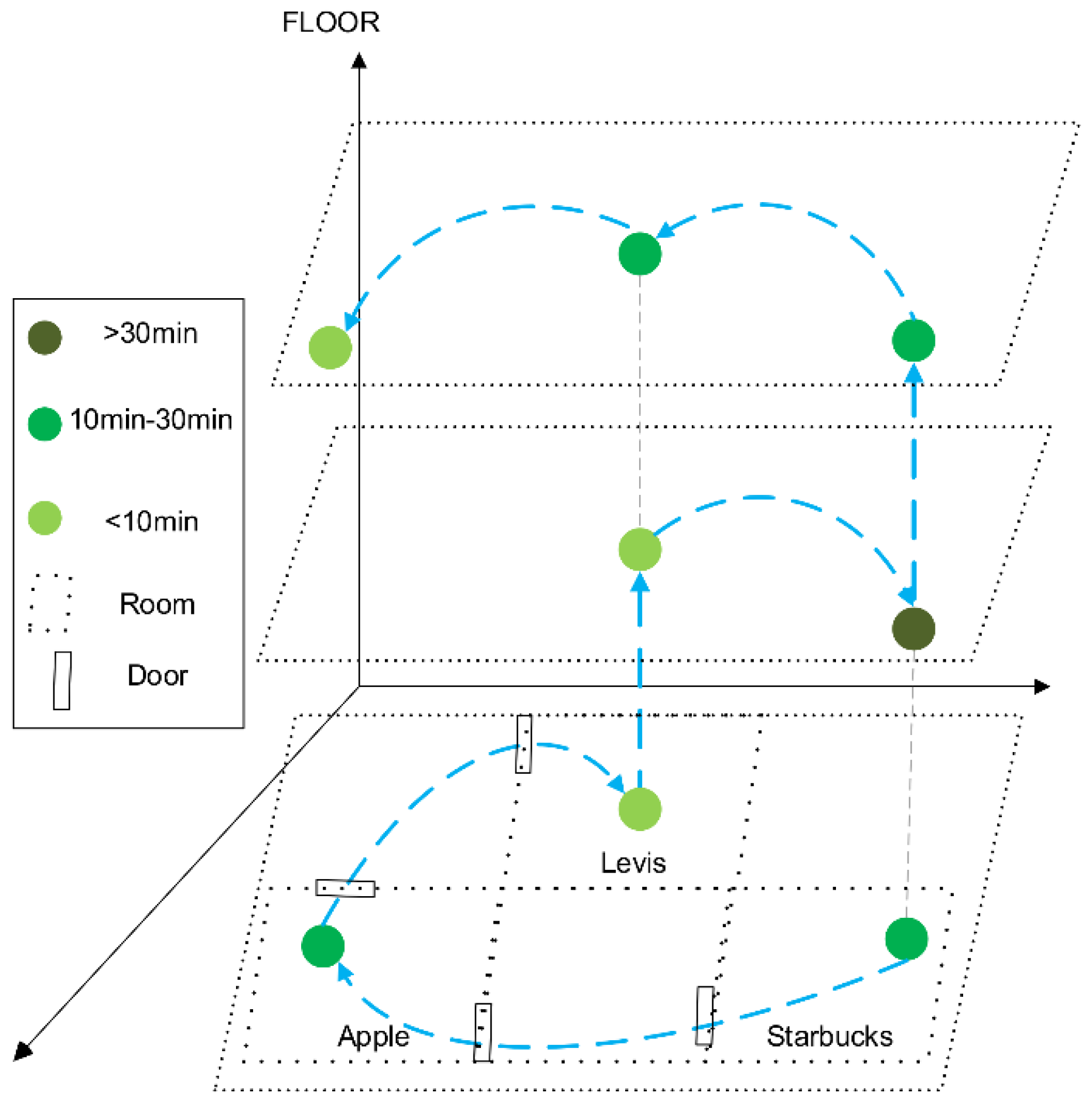
Figure 13.
Semantic trajectory. The circle represents the moving object.
Figure 13.
Semantic trajectory. The circle represents the moving object.
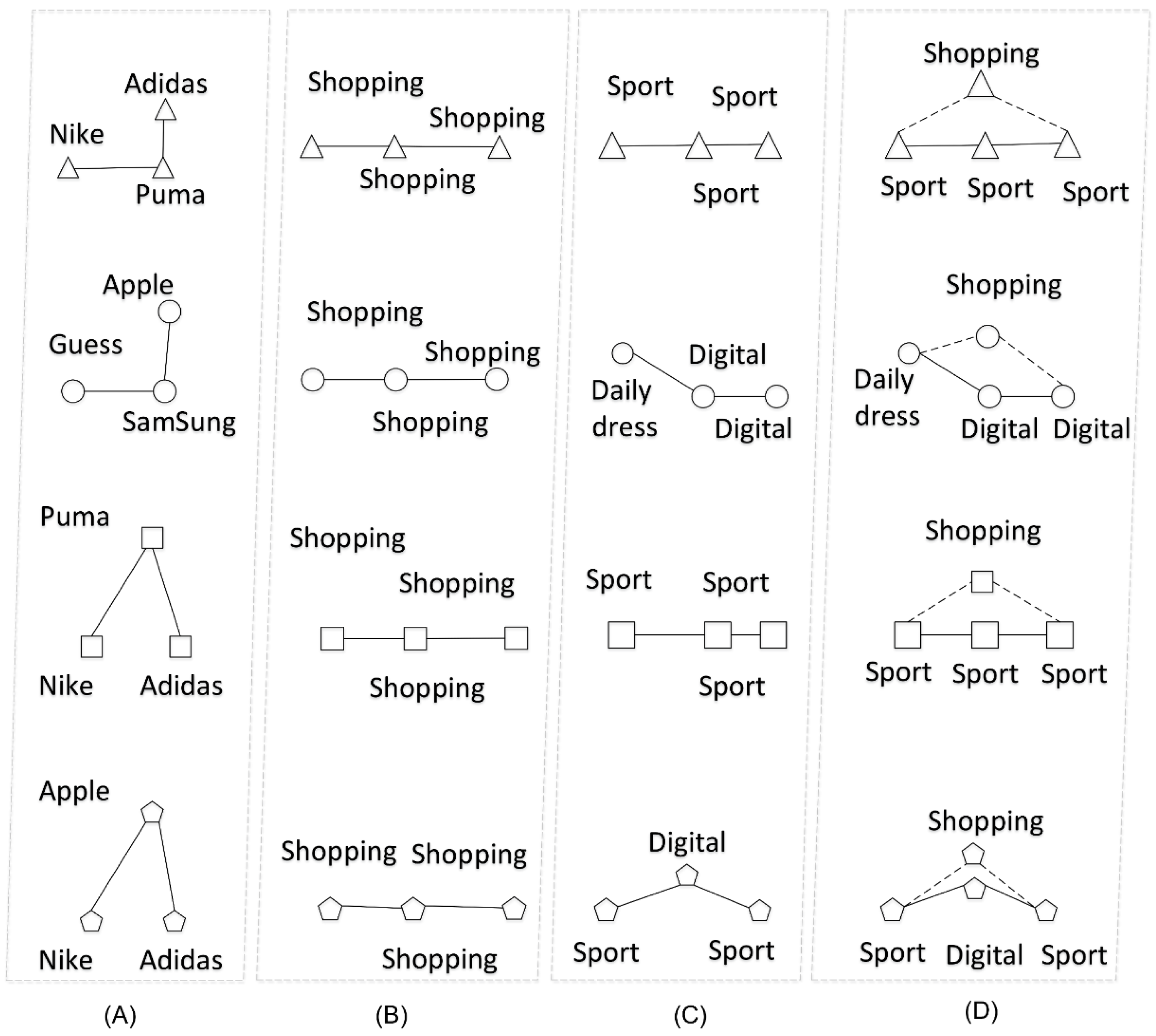
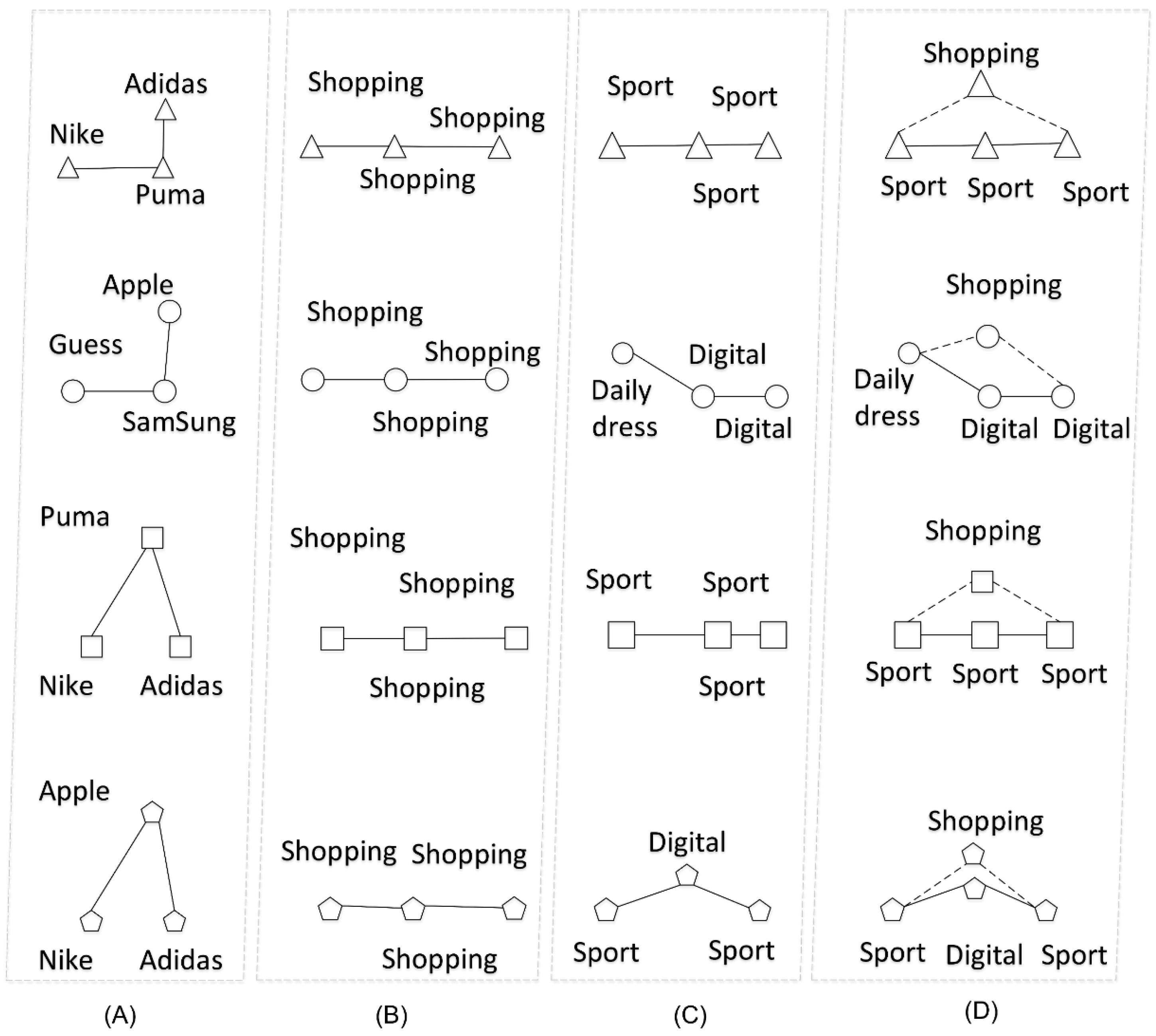
Figure 14.
Multi-granularity semantic trajectory. The triangles, circles, rectangles, and pentagons denotes users 1, 2, 3, and 4, respectively: (A) The shapes of the indoor planar trajectories is not suitable for evaluating user similarity; (B) Using only the coarse-grained semantic information can’t reflect the differences visually; (C) Using only the fine-grained semantic hierarchy will cause the measurement of the similarity between users to fall into a local trap; (D) Multi-granularity semantic trajectory is consistent with the actual situation.
Figure 14.
Multi-granularity semantic trajectory. The triangles, circles, rectangles, and pentagons denotes users 1, 2, 3, and 4, respectively: (A) The shapes of the indoor planar trajectories is not suitable for evaluating user similarity; (B) Using only the coarse-grained semantic information can’t reflect the differences visually; (C) Using only the fine-grained semantic hierarchy will cause the measurement of the similarity between users to fall into a local trap; (D) Multi-granularity semantic trajectory is consistent with the actual situation.
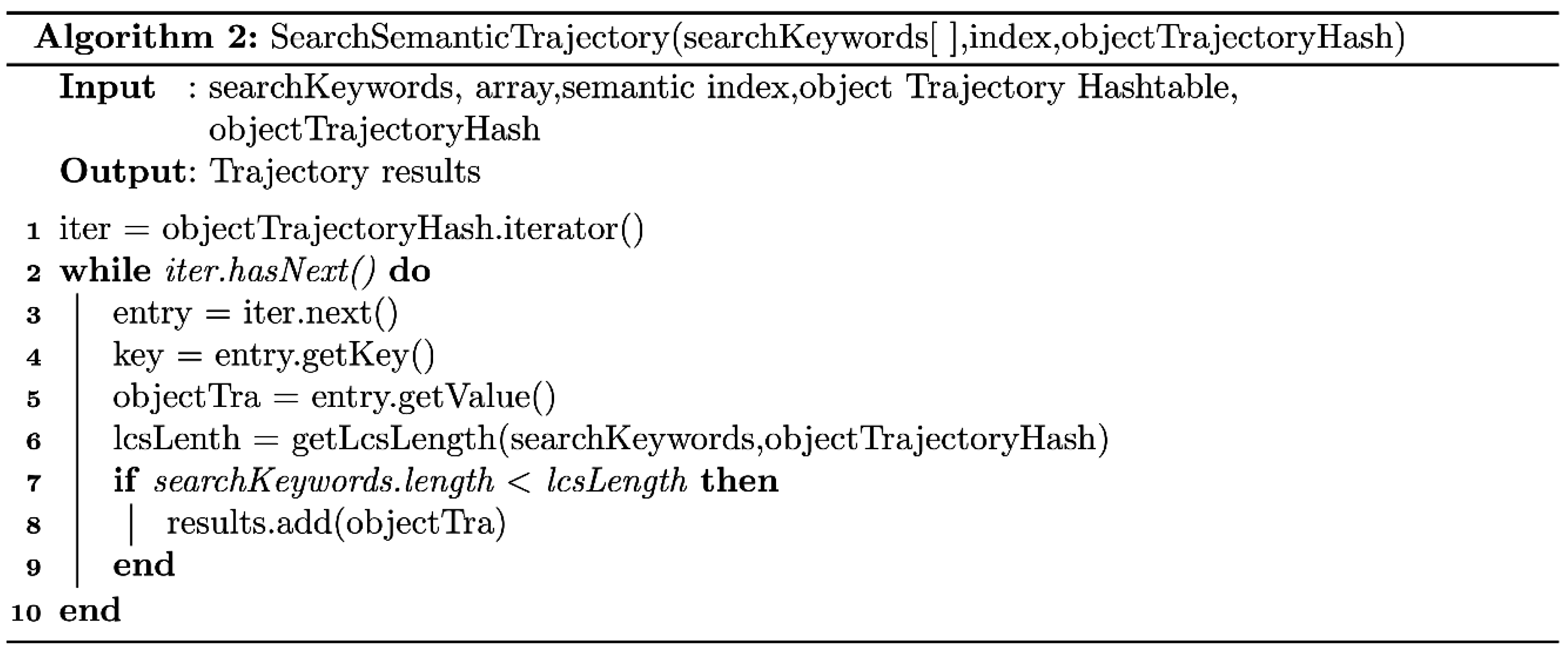
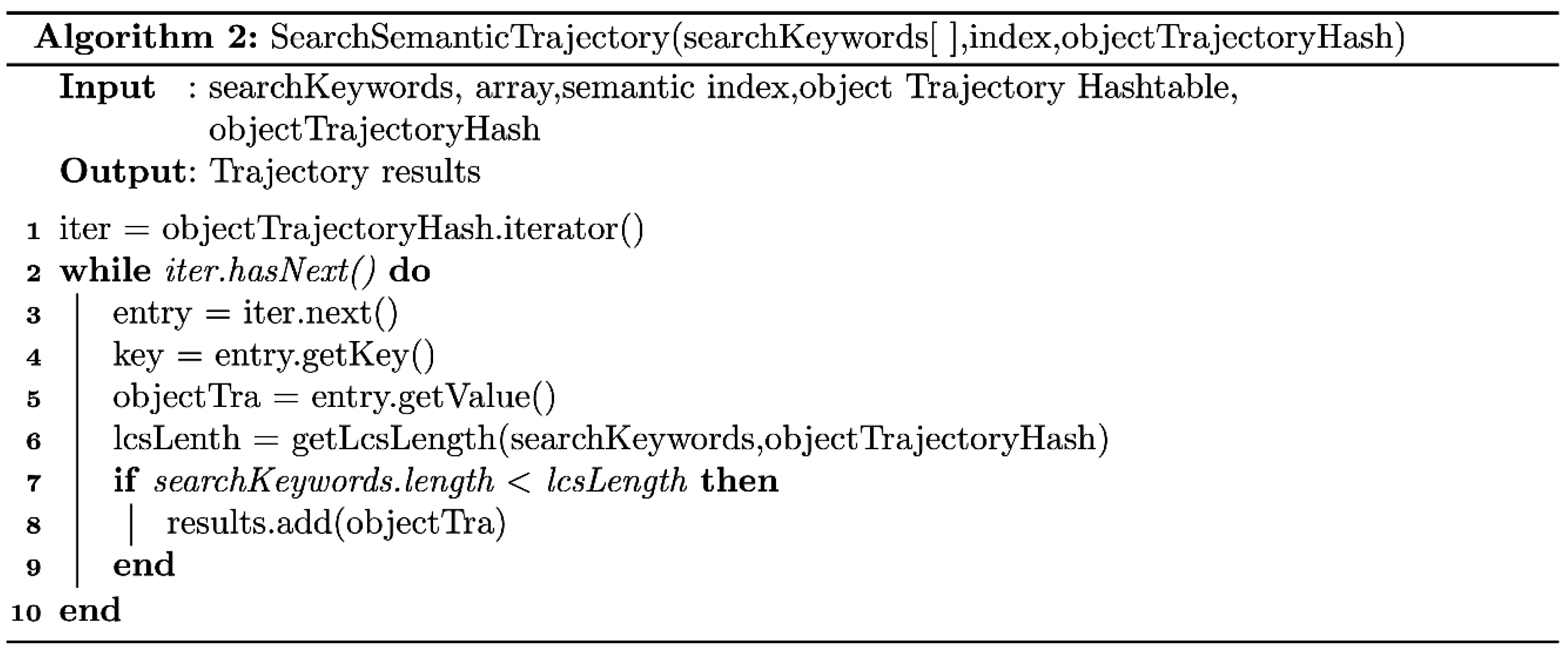
Figure 15.
The semantic trajectory query algorithm.
Figure 15.
The semantic trajectory query algorithm.
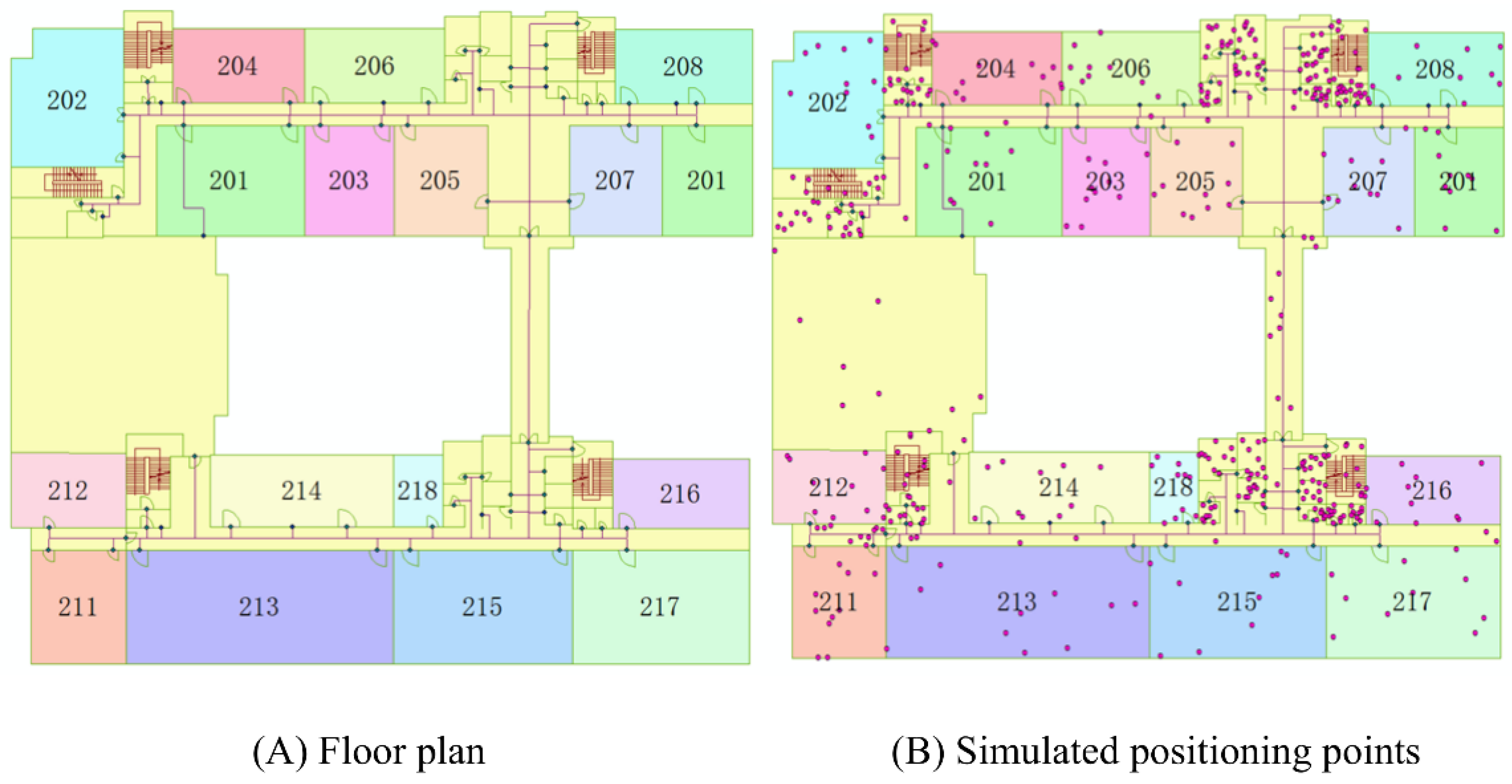
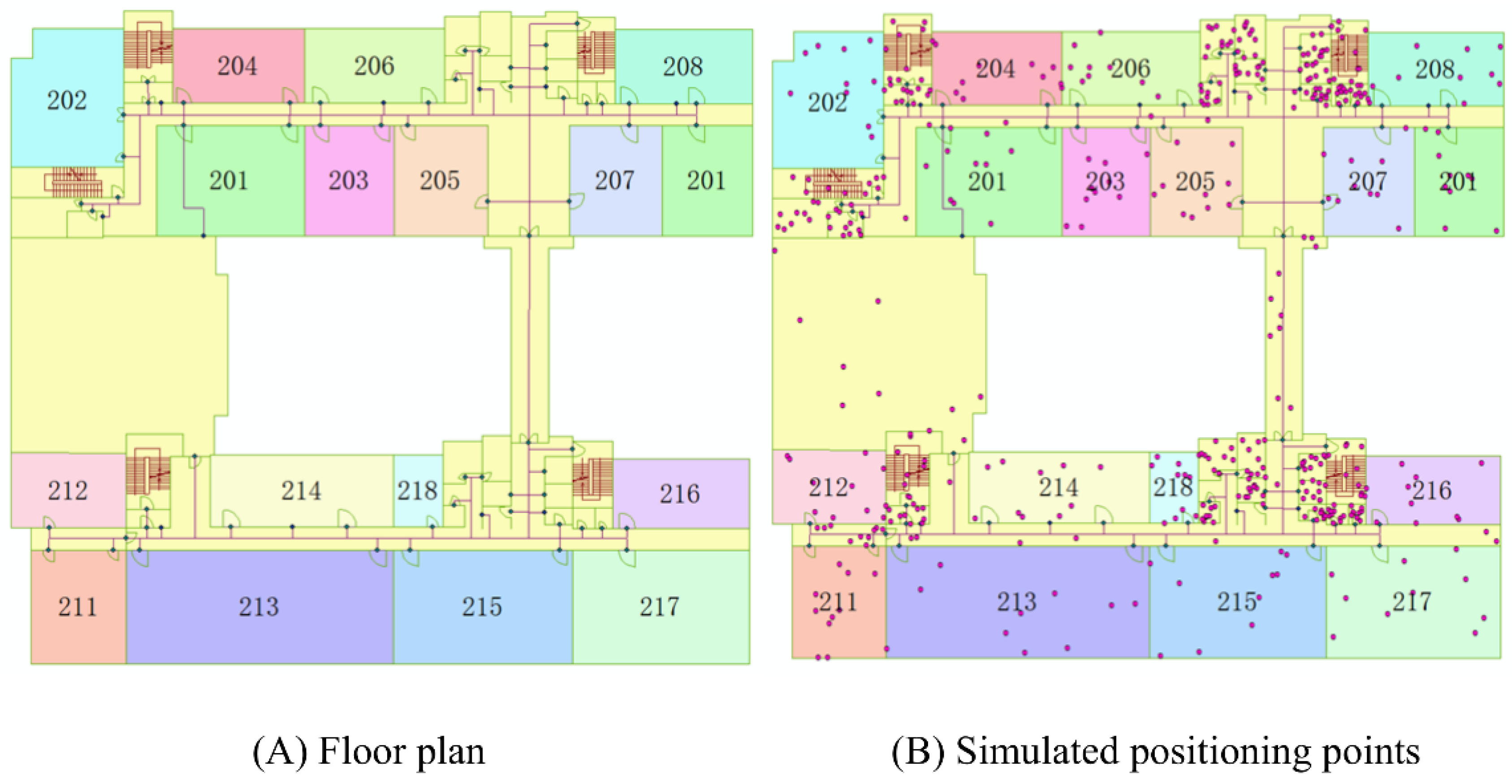
Figure 16.
(A,B) Simulated floor plan and the positioning points.
Figure 16.
(A,B) Simulated floor plan and the positioning points.
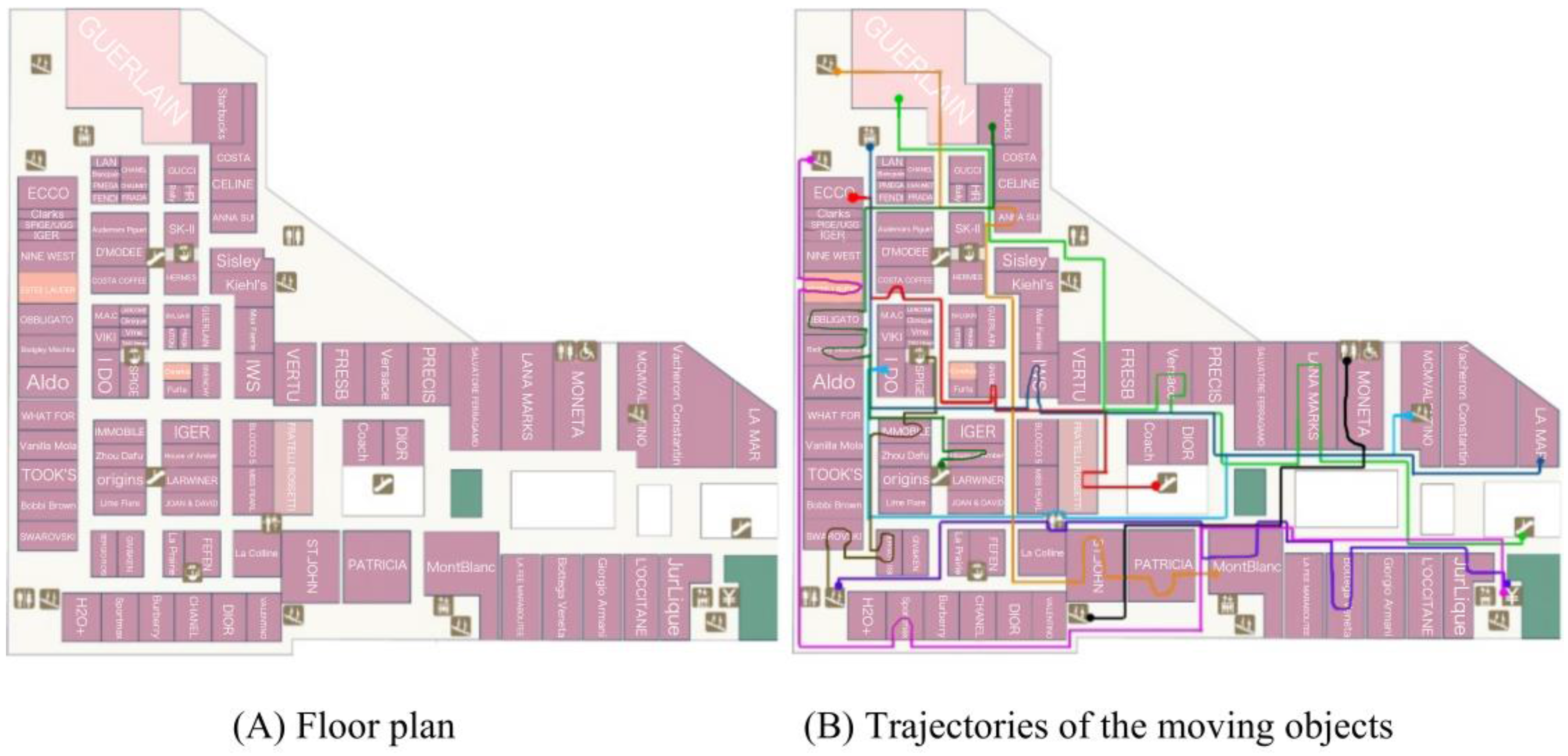
Figure 17.
(A,B) Floor plan of the real environment and the trajectories of the moving objects.
Figure 17.
(A,B) Floor plan of the real environment and the trajectories of the moving objects.
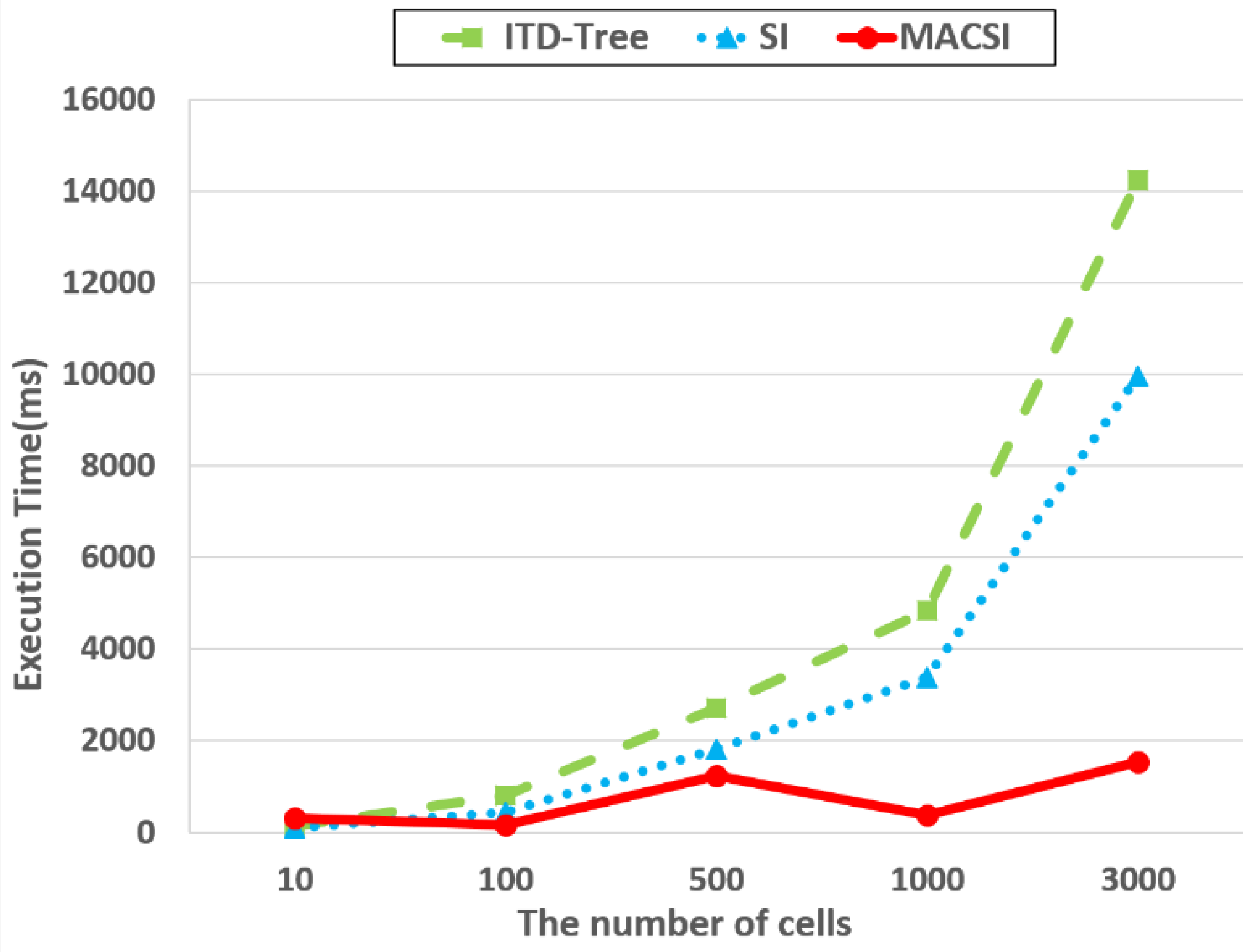
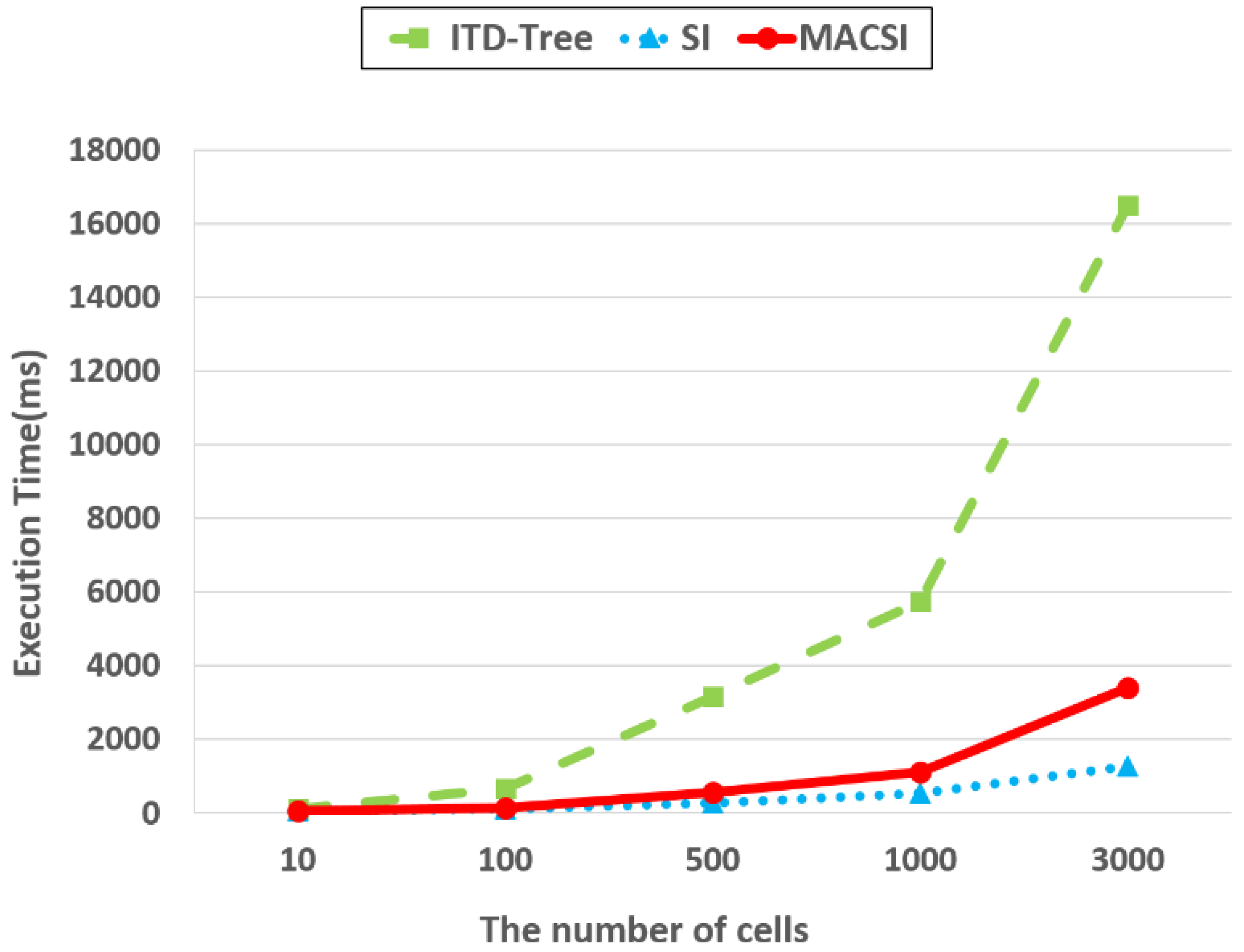
Figure 18.
The effect of cell number on fine-grained semantic cell query.
Figure 18.
The effect of cell number on fine-grained semantic cell query.
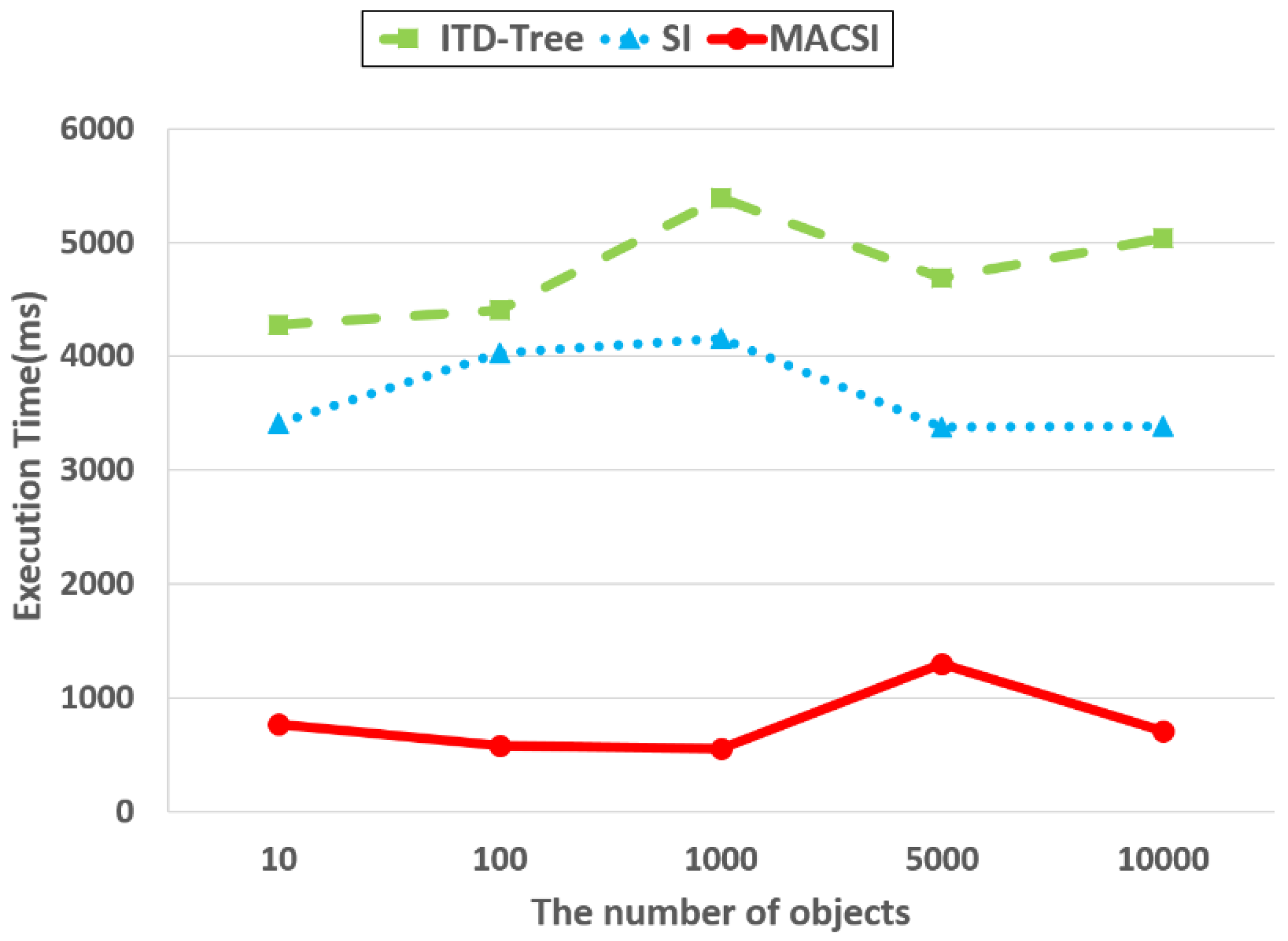
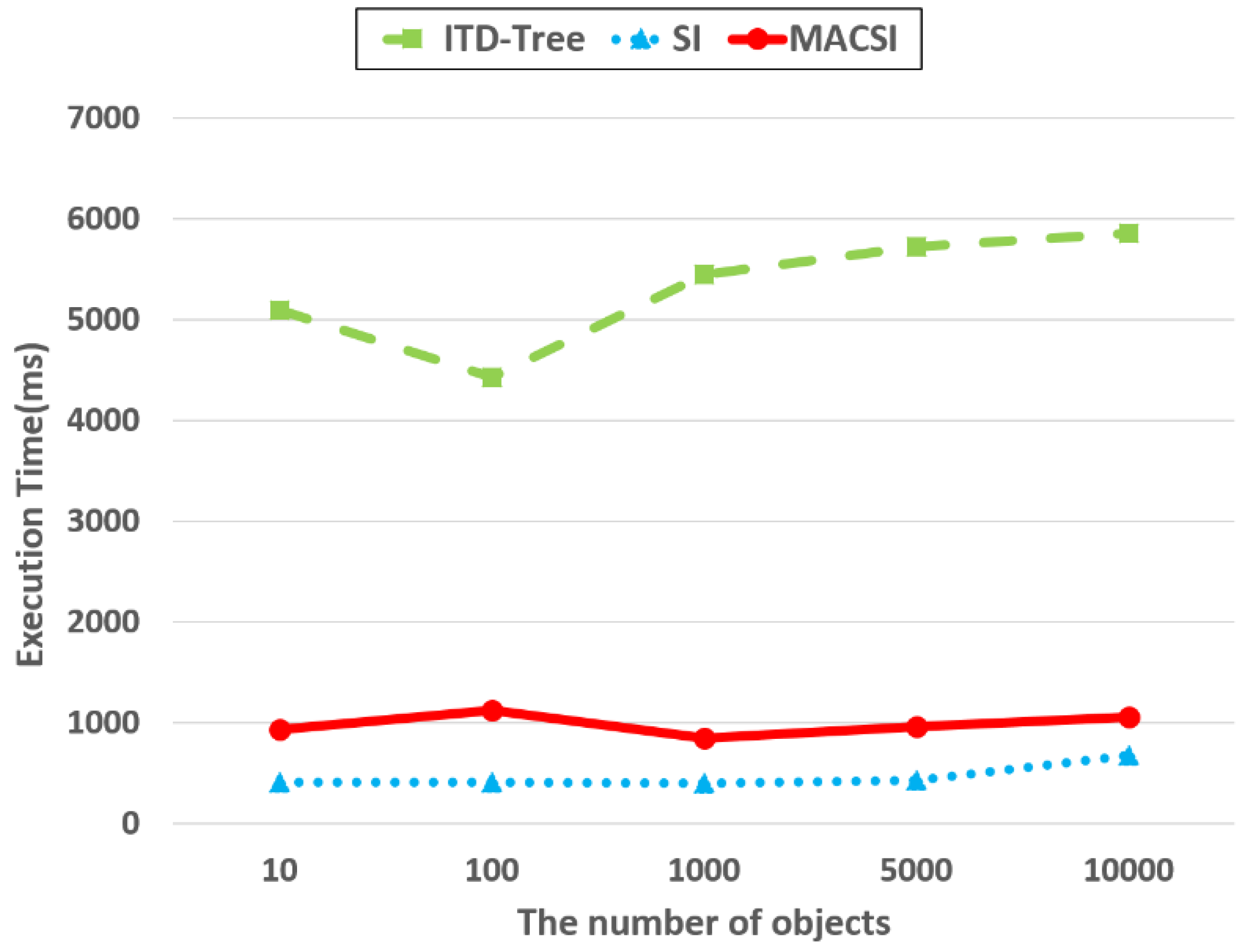
Figure 19.
The effect of object number on fine-grained semantic cell query.
Figure 19.
The effect of object number on fine-grained semantic cell query.
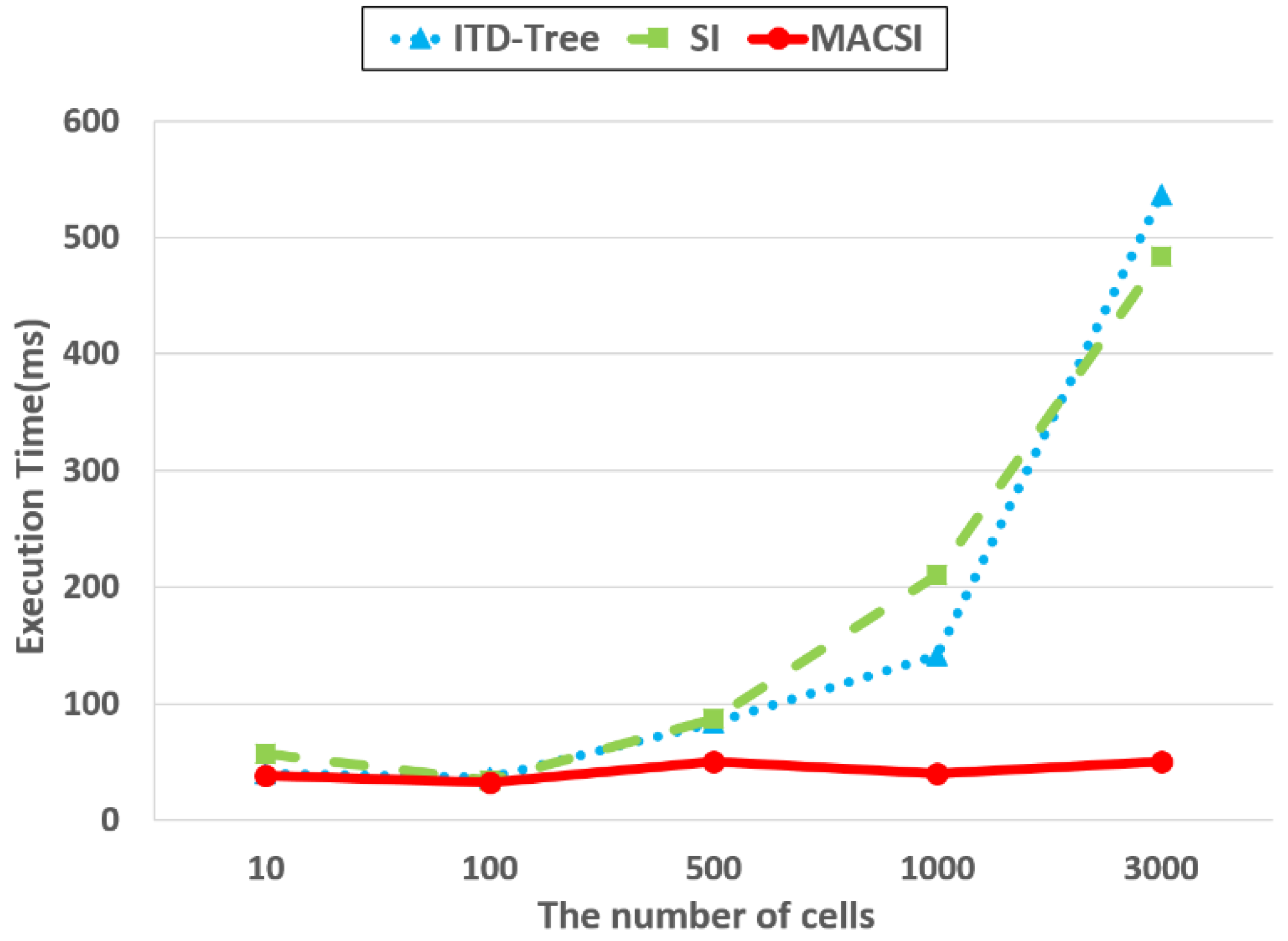
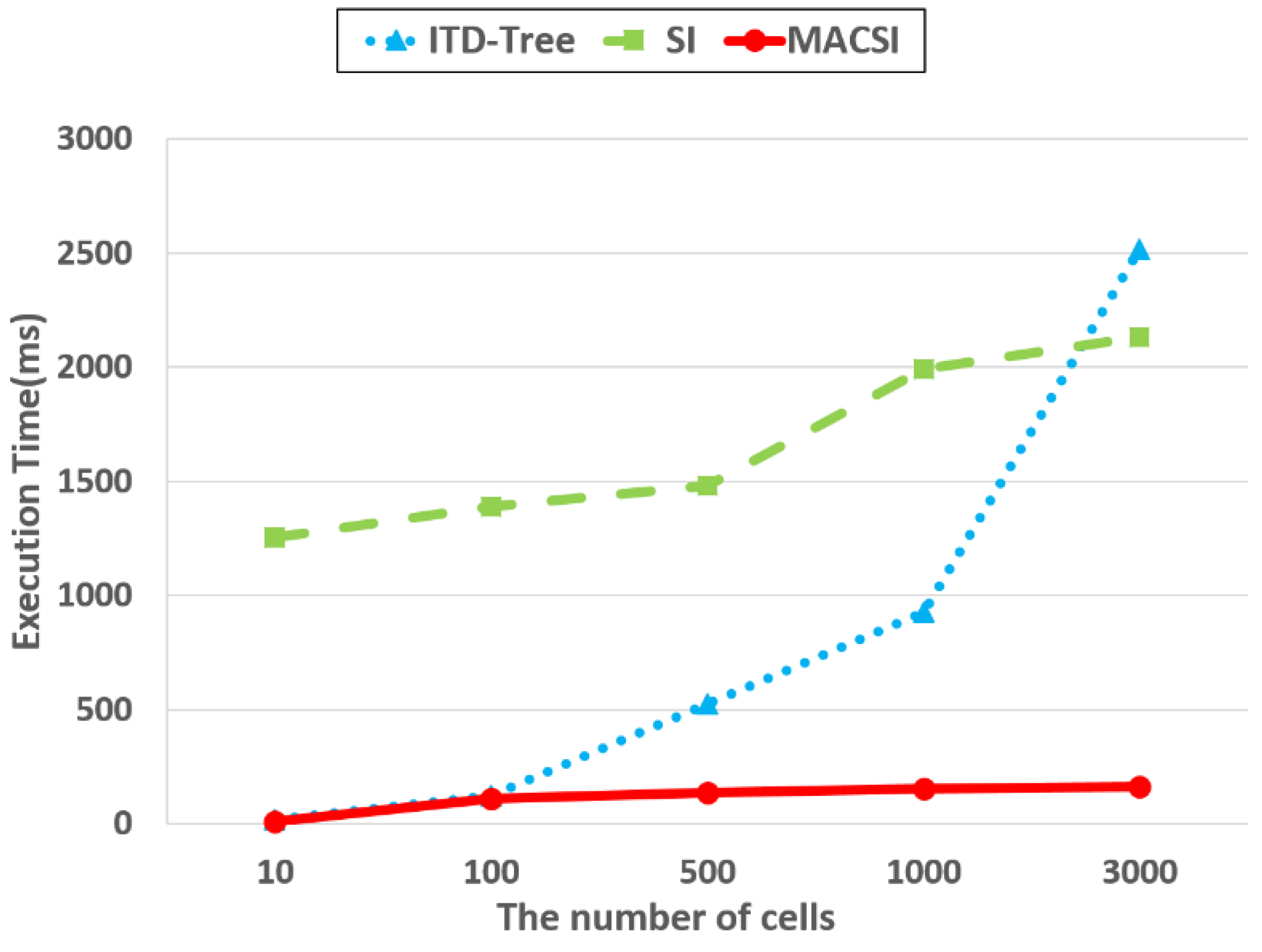
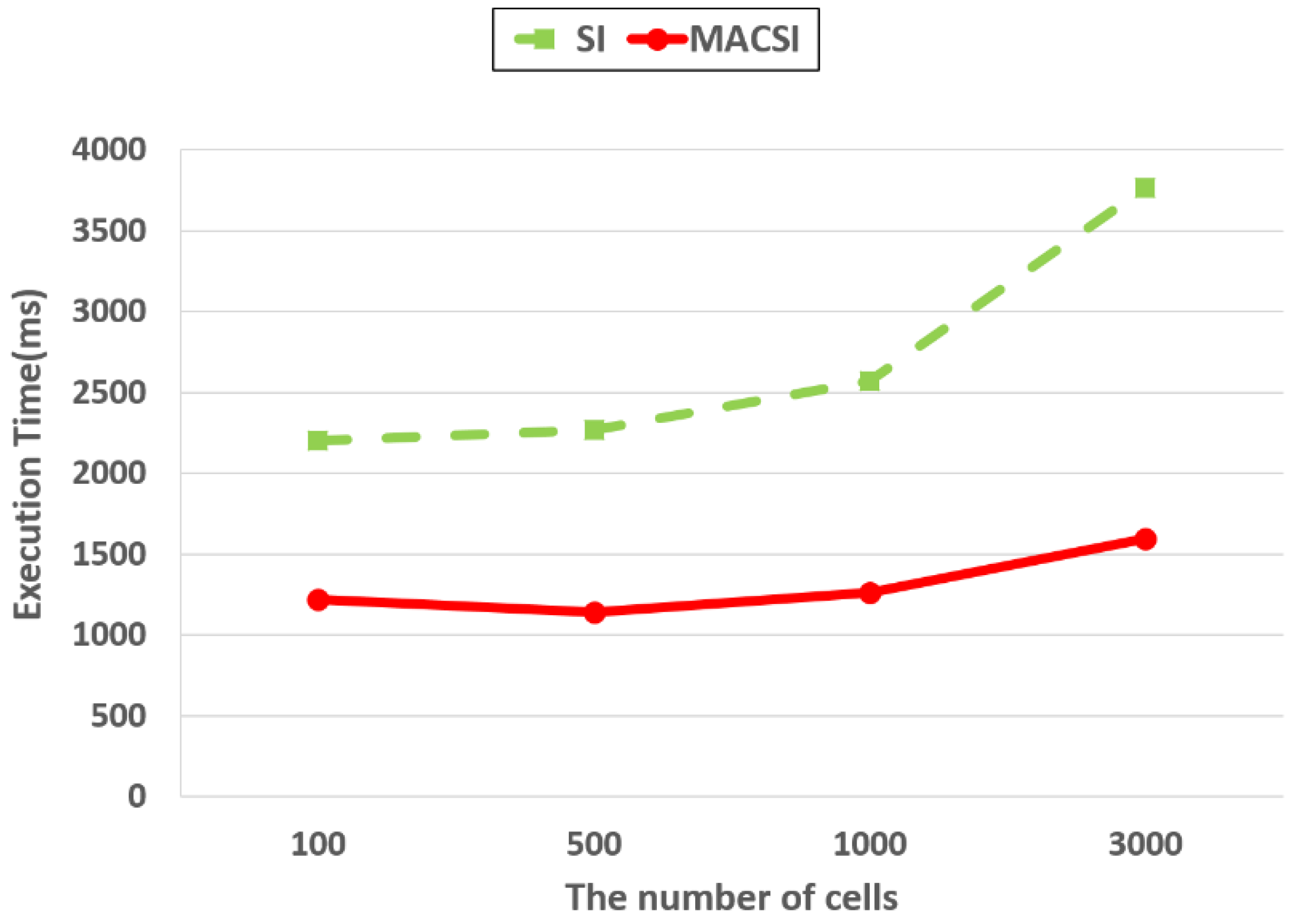
Figure 20.
The effect of cell number on the coarse-grained semantic cell query performance.
Figure 20.
The effect of cell number on the coarse-grained semantic cell query performance.
Figure 21.
The effect of object number on the coarse-grained semantic cell query performance.
Figure 21.
The effect of object number on the coarse-grained semantic cell query performance.
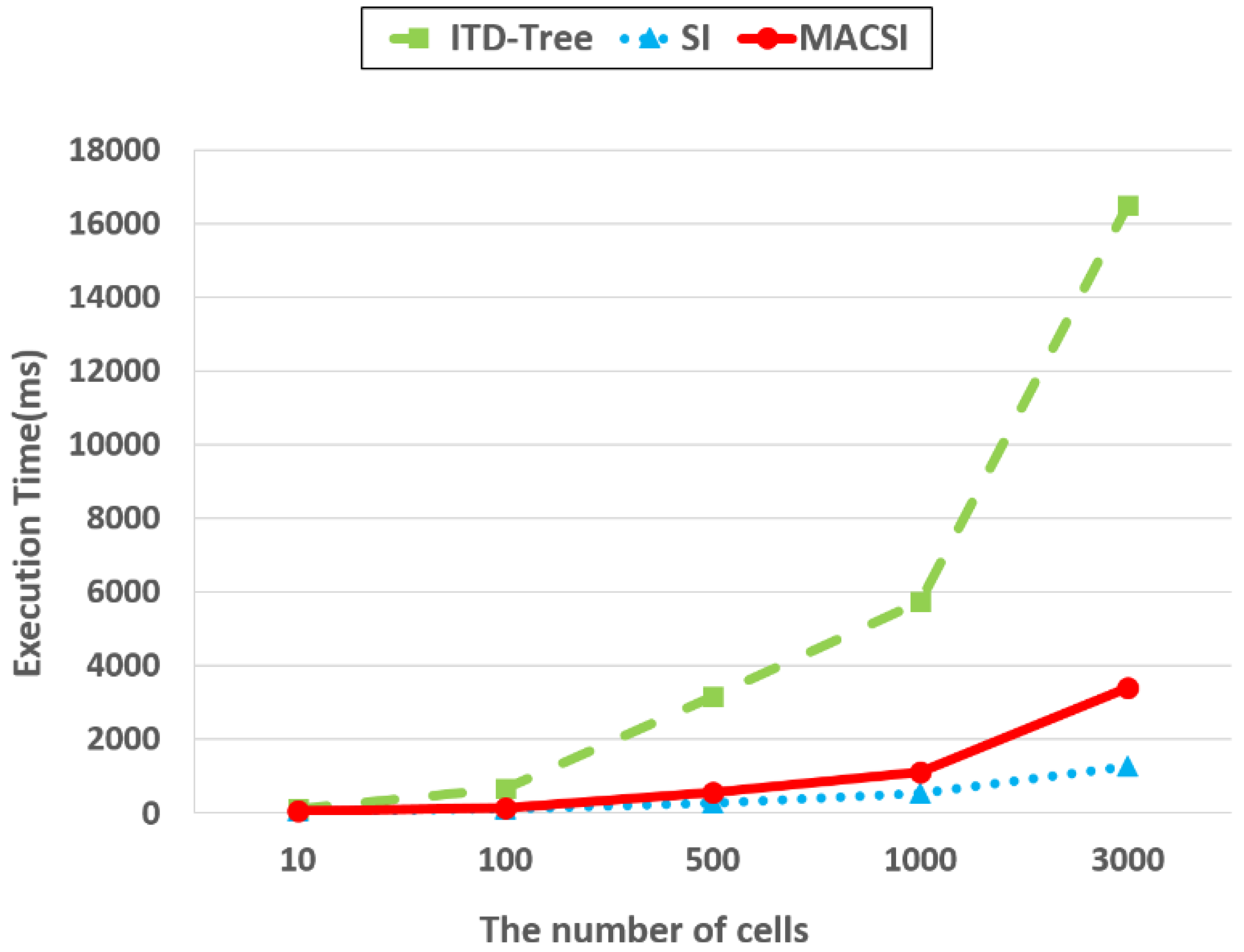
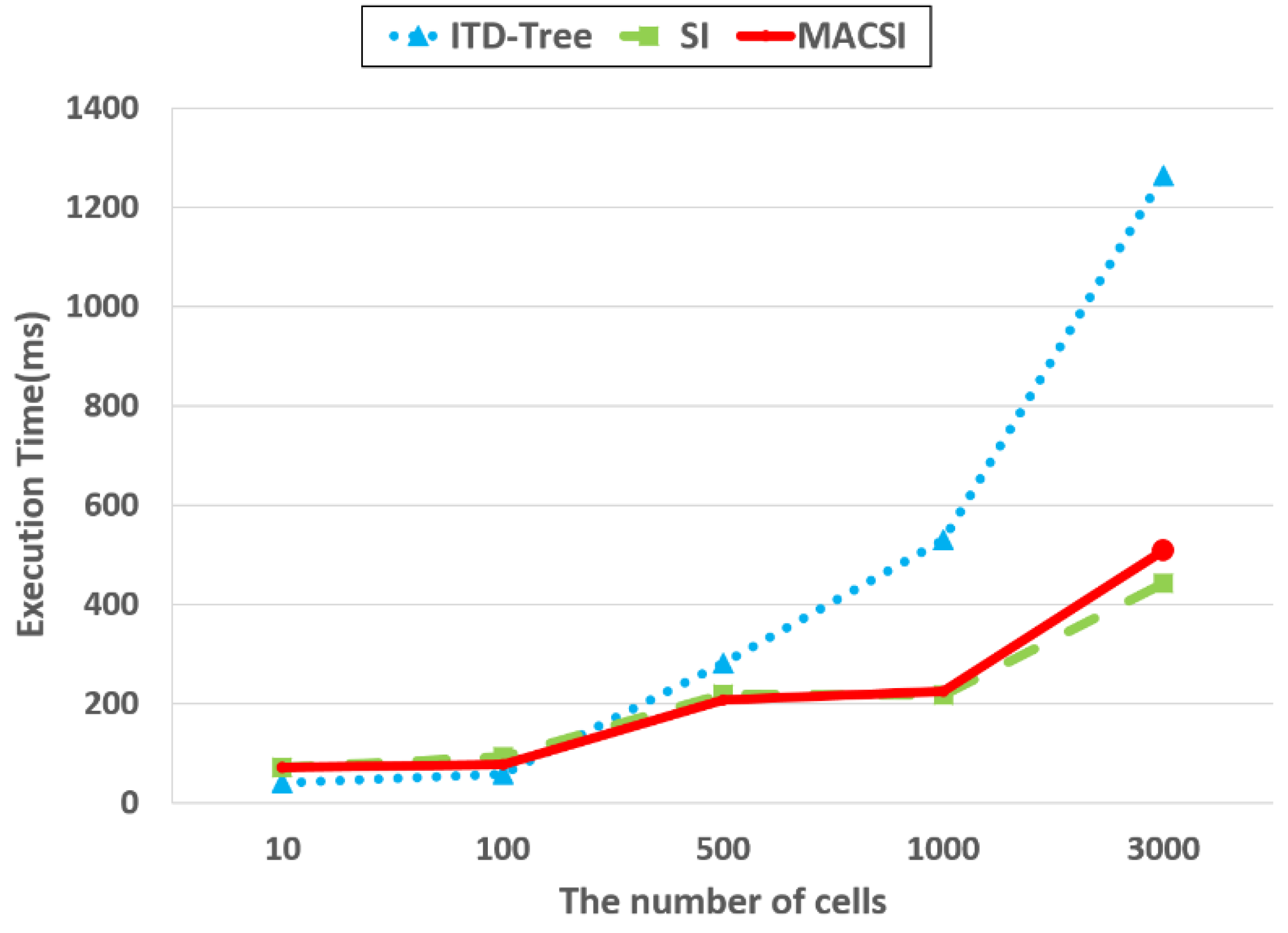
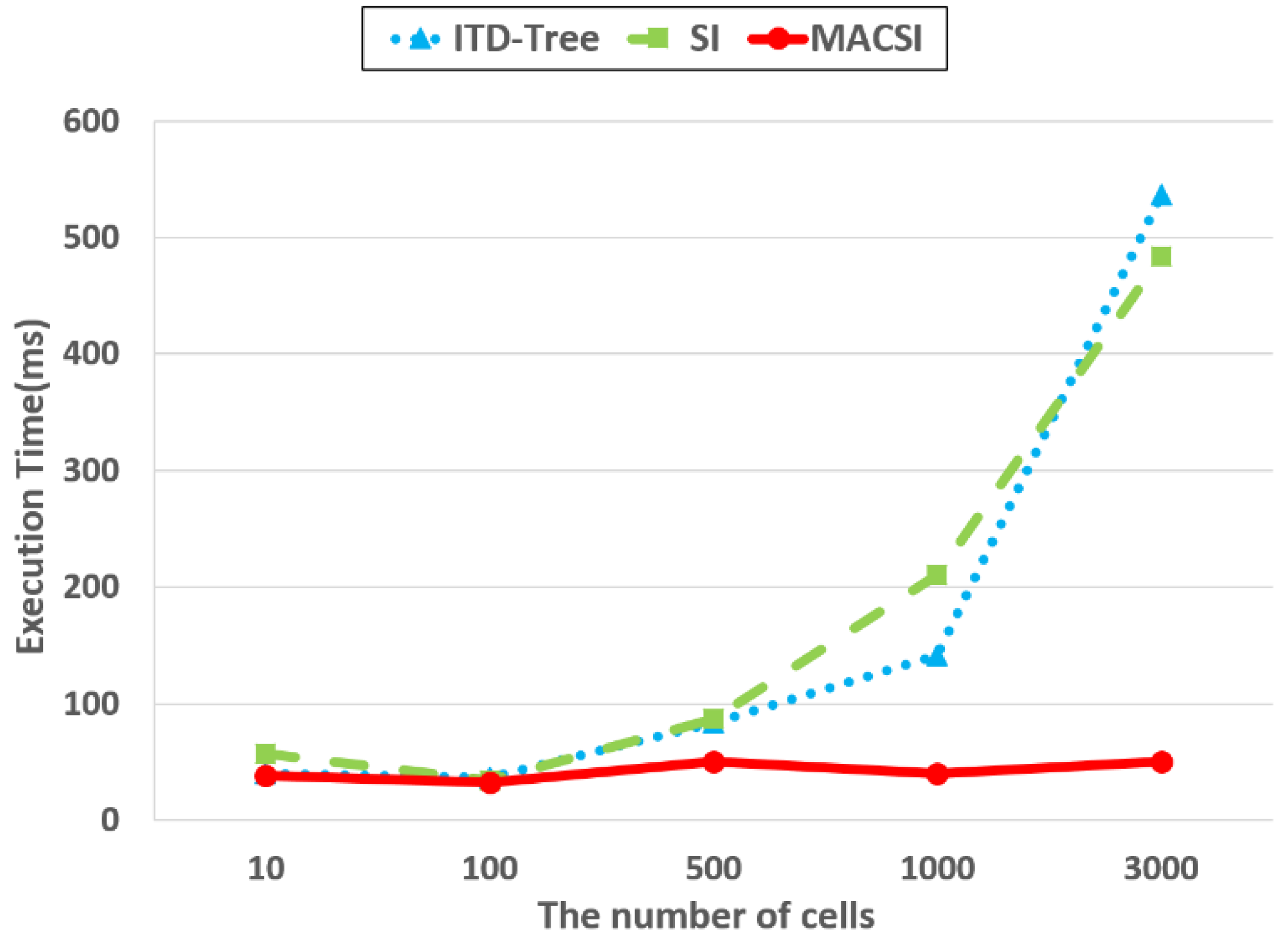
Figure 22.
The effect of cell number on the fine-grained semantic object query performance.
Figure 22.
The effect of cell number on the fine-grained semantic object query performance.
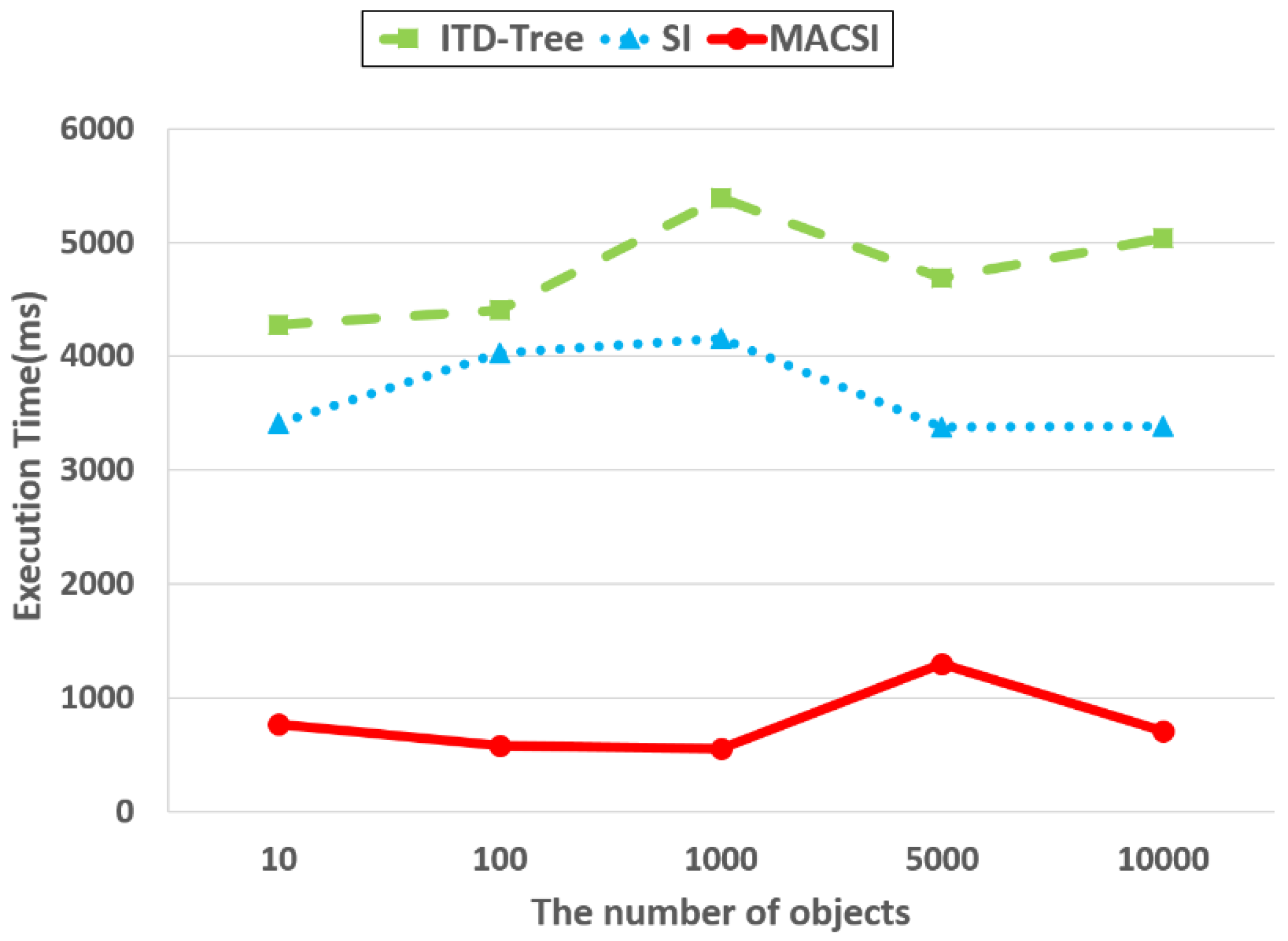
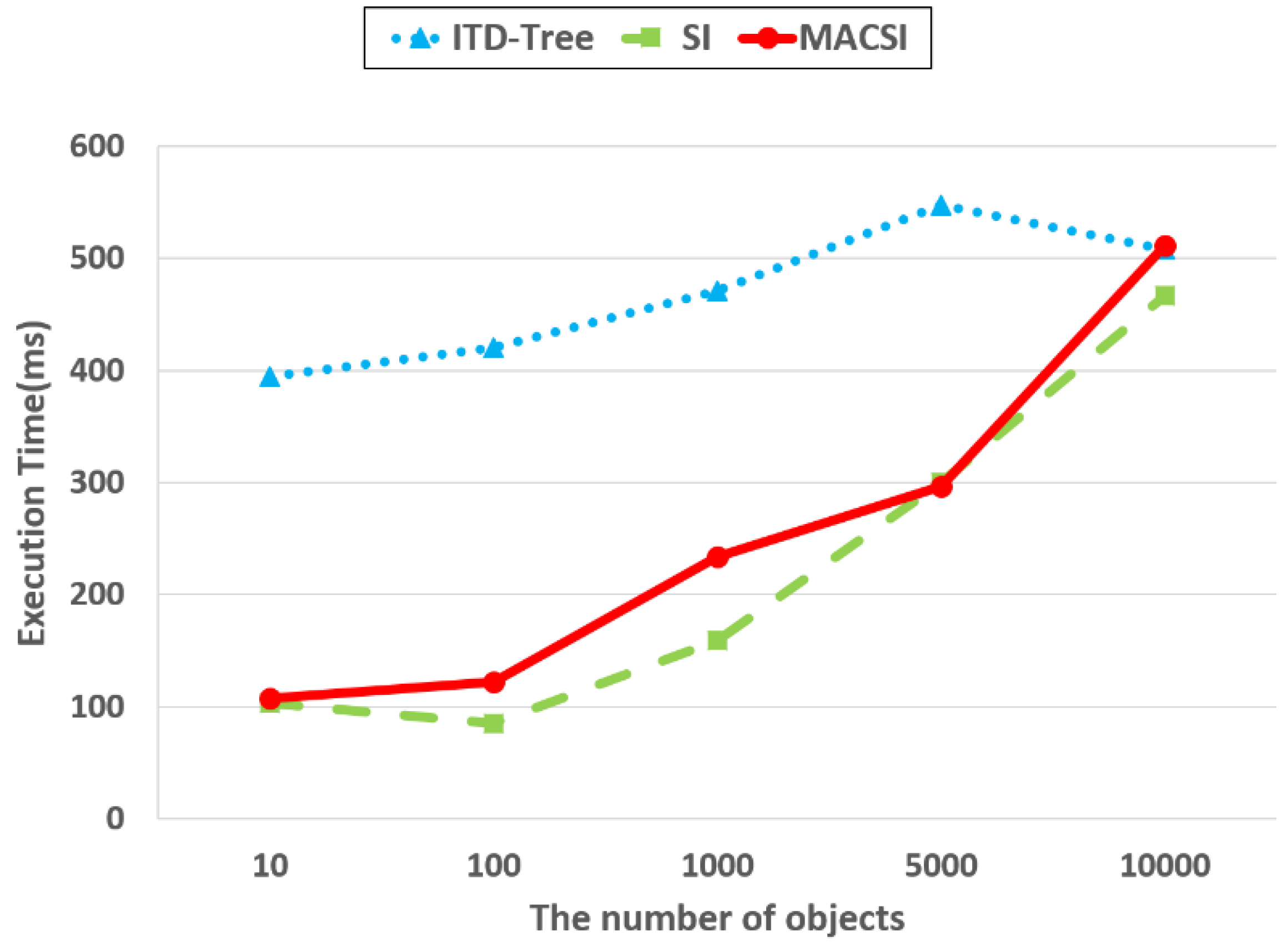
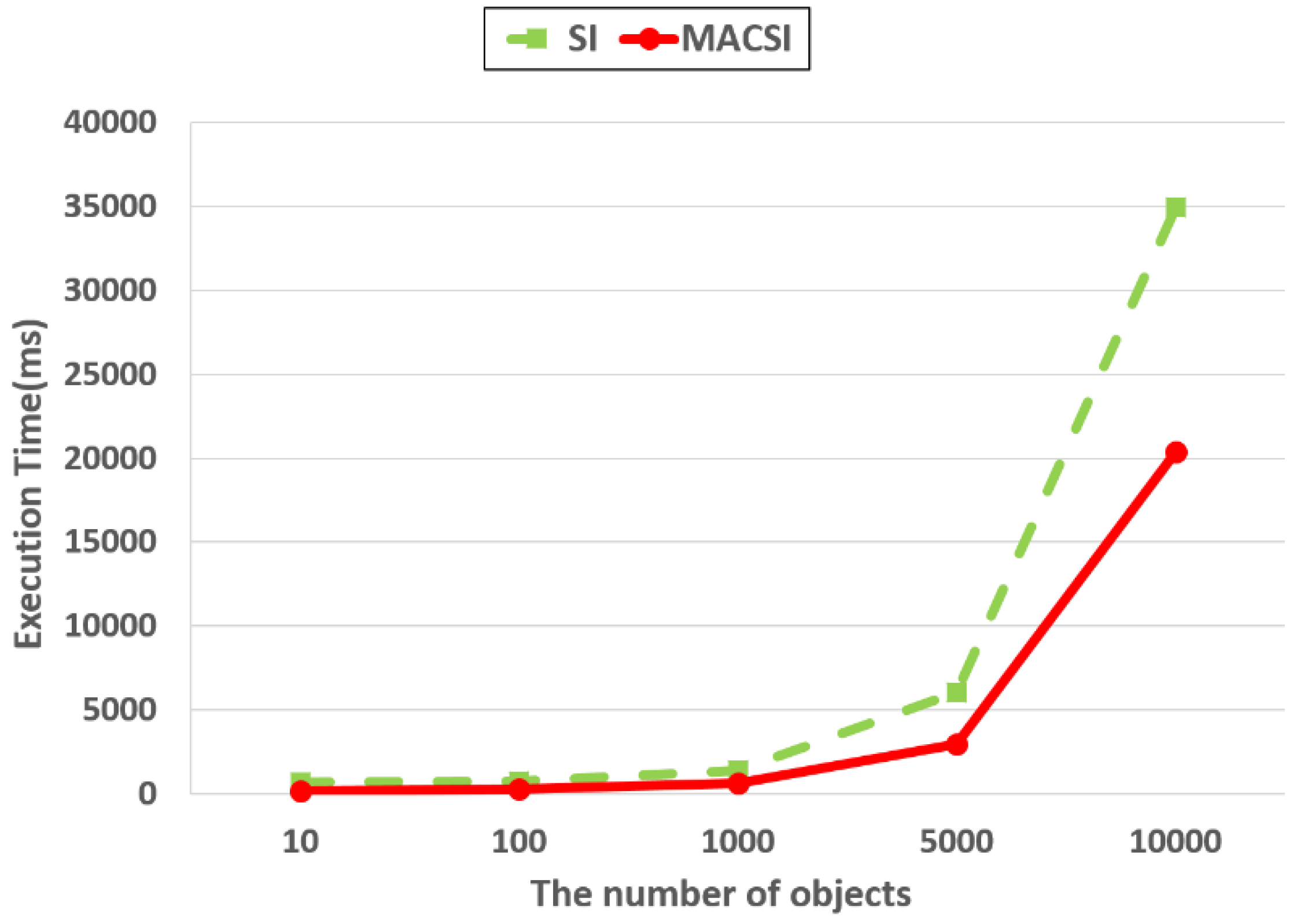
Figure 23.
The effect of object number on the fine-grained semantic object query performance.
Figure 23.
The effect of object number on the fine-grained semantic object query performance.
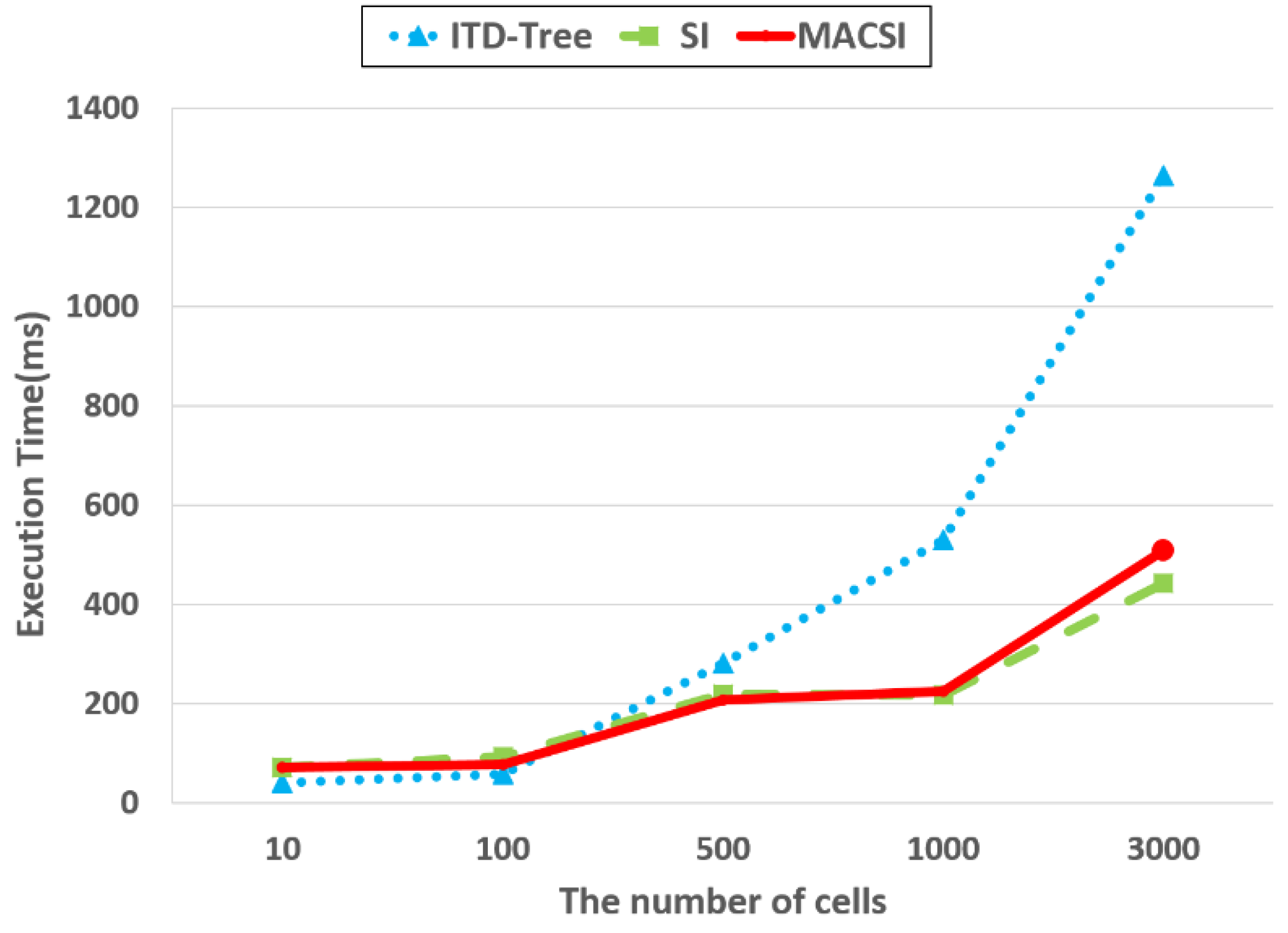
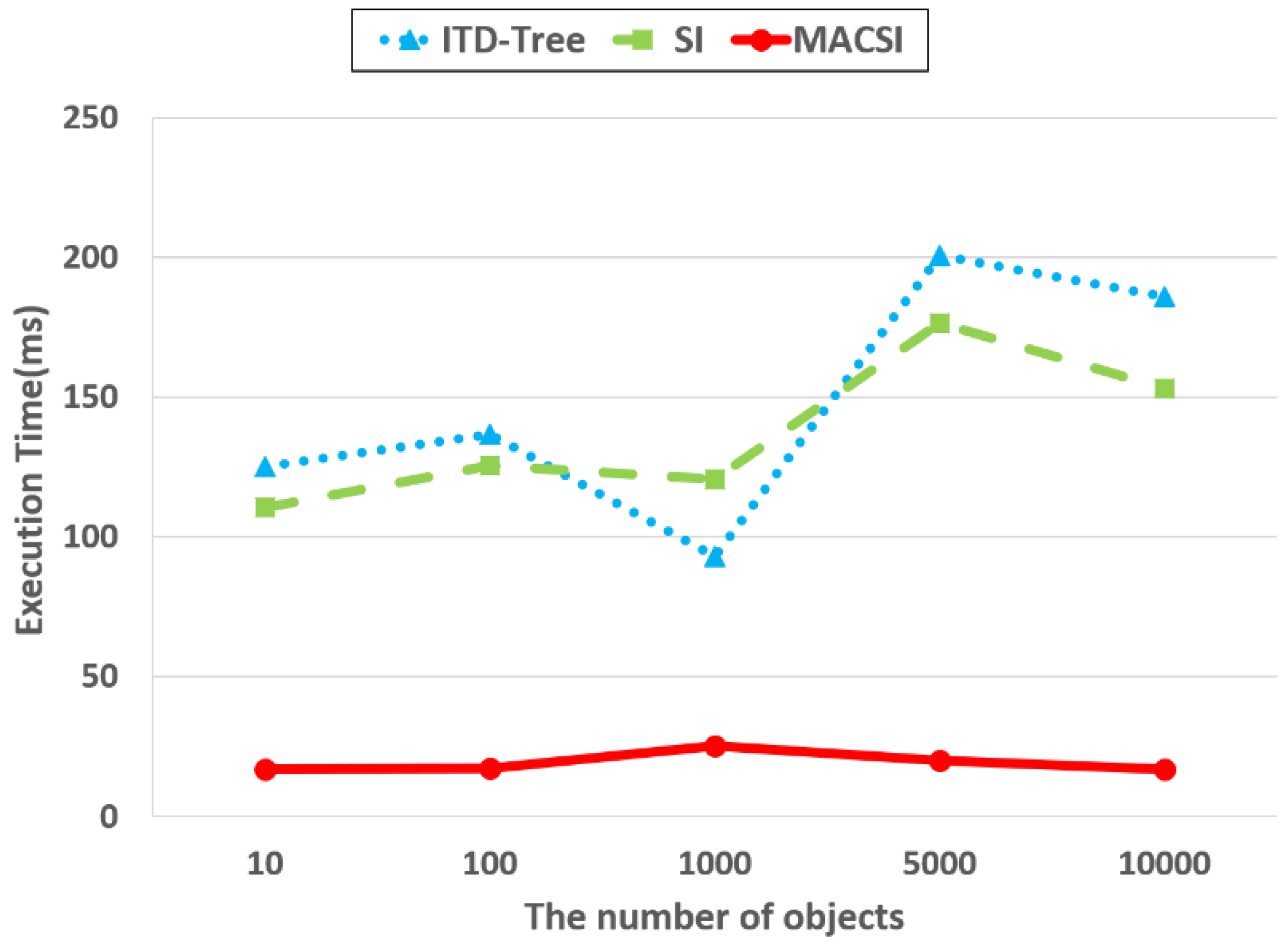
Figure 24.
The effect of cell number on the coarse-grained semantic object query performance.
Figure 24.
The effect of cell number on the coarse-grained semantic object query performance.
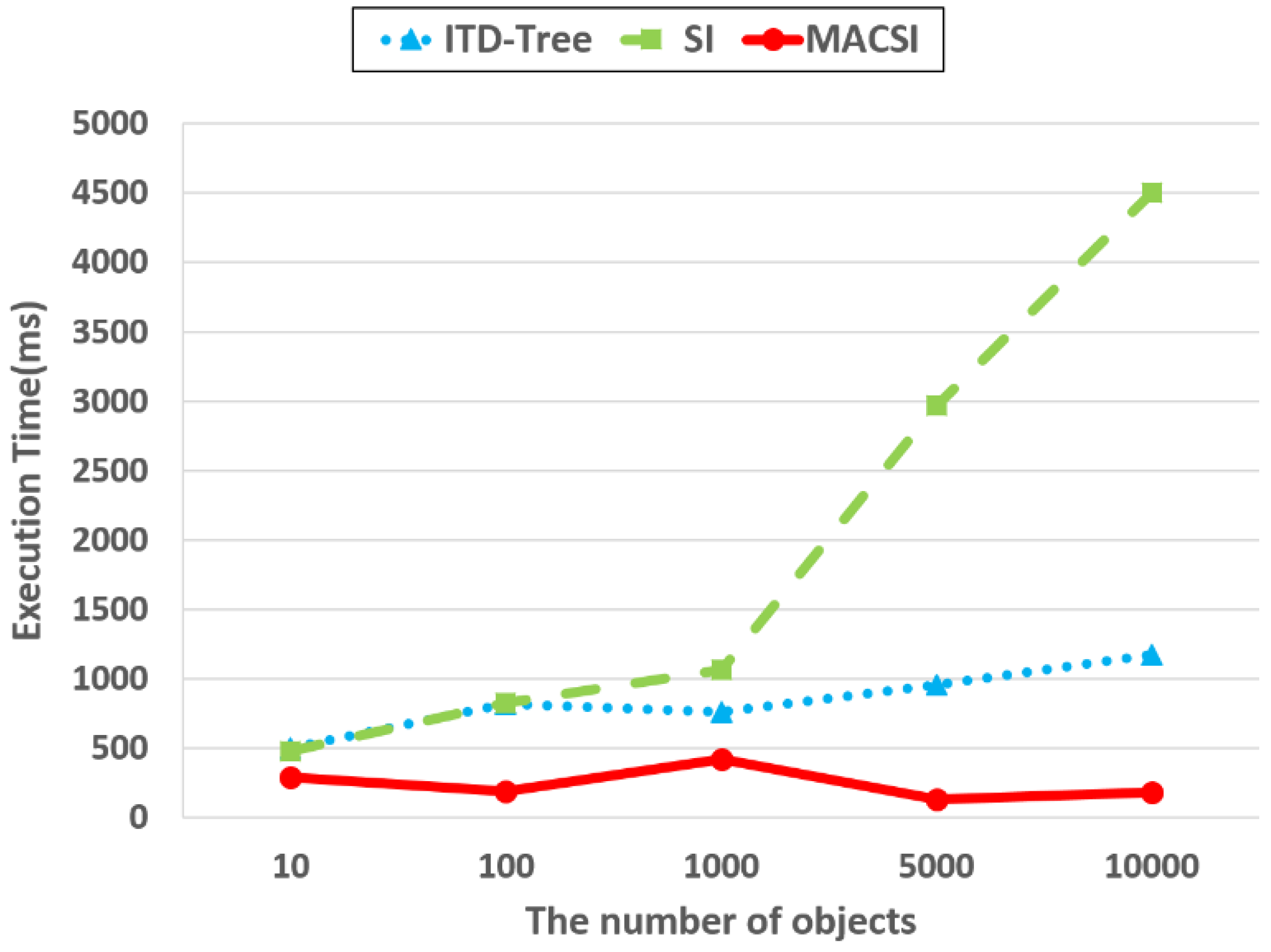
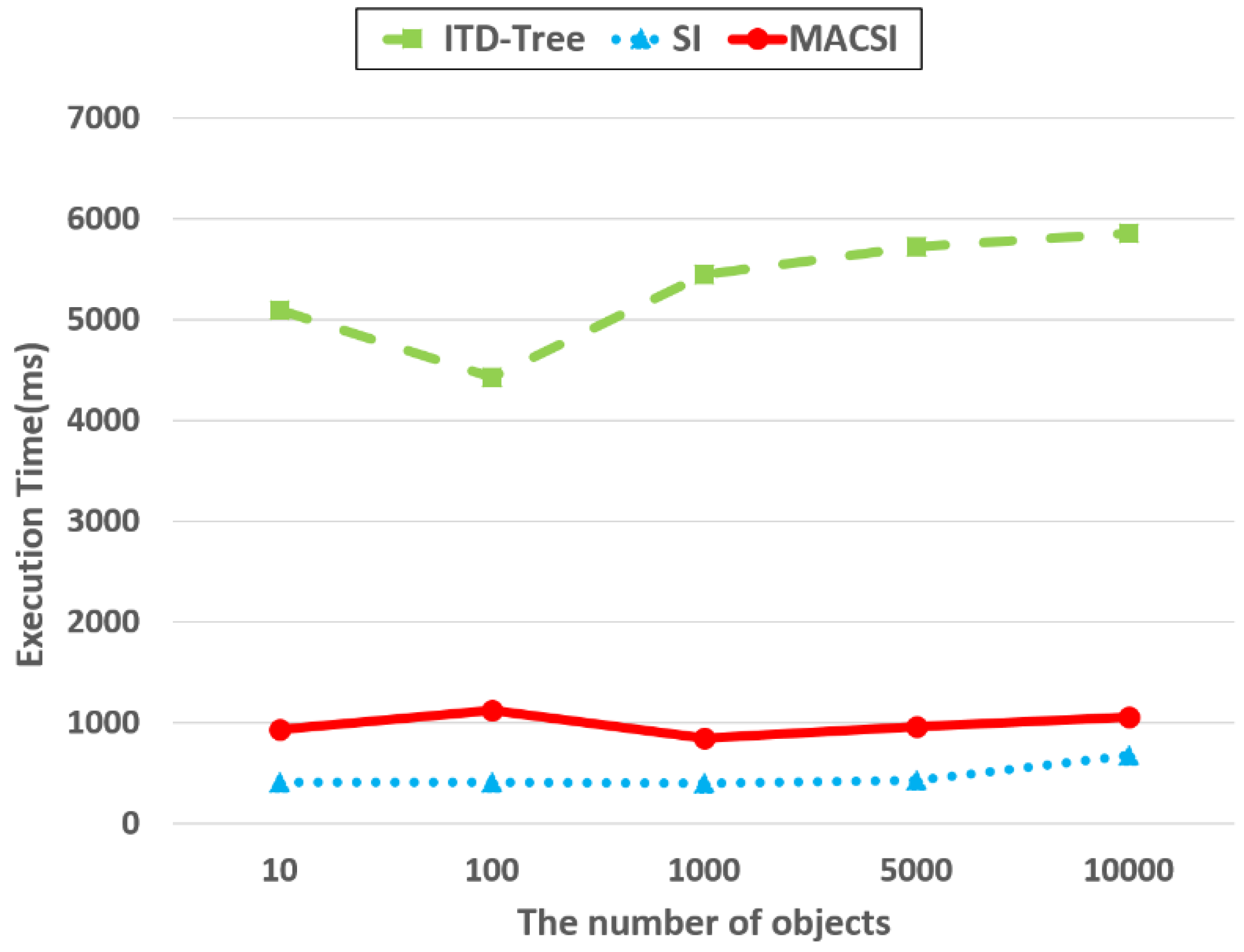
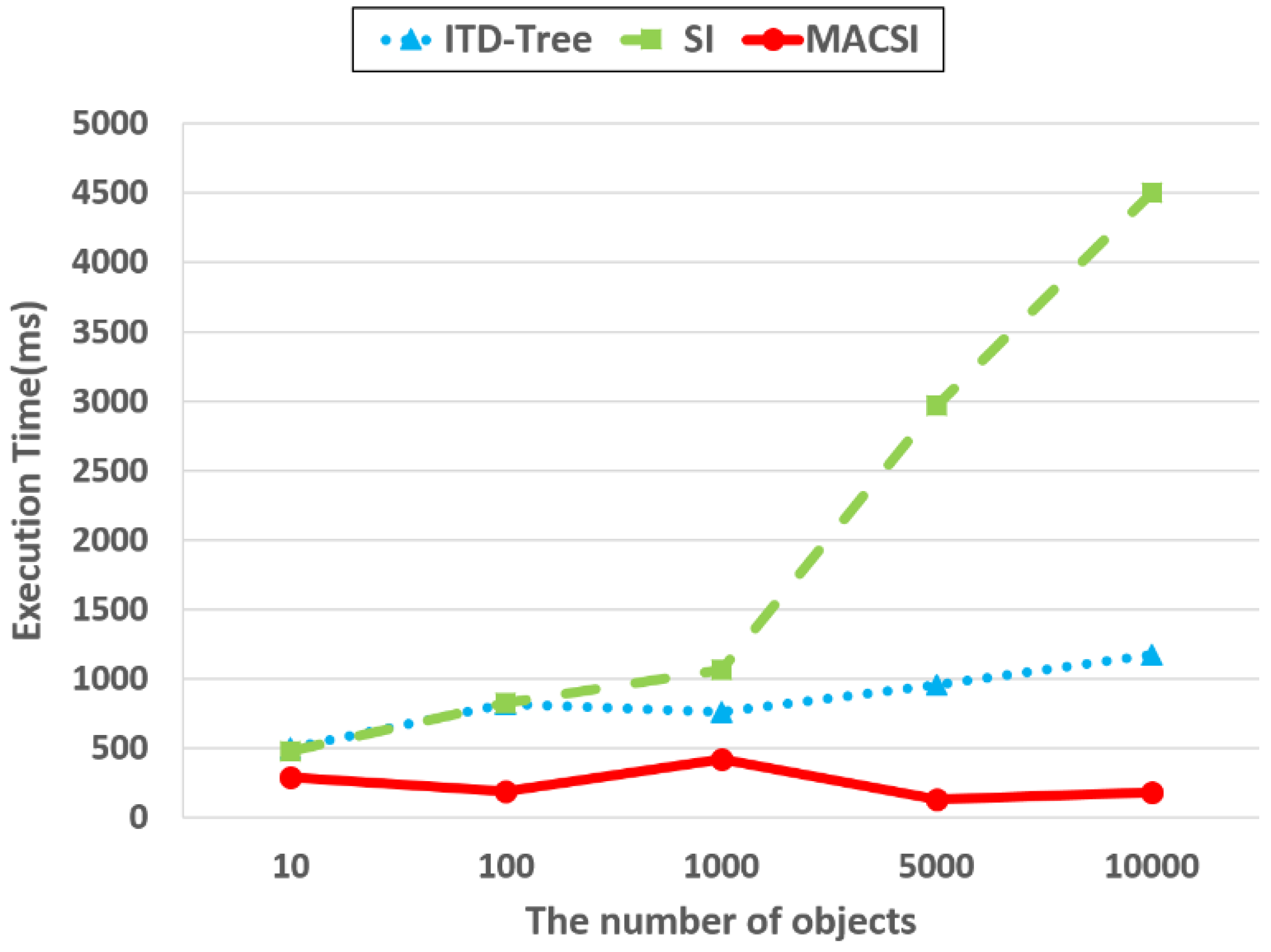
Figure 25.
The effect of object number on the coarse-grained semantic object query performance.
Figure 25.
The effect of object number on the coarse-grained semantic object query performance.
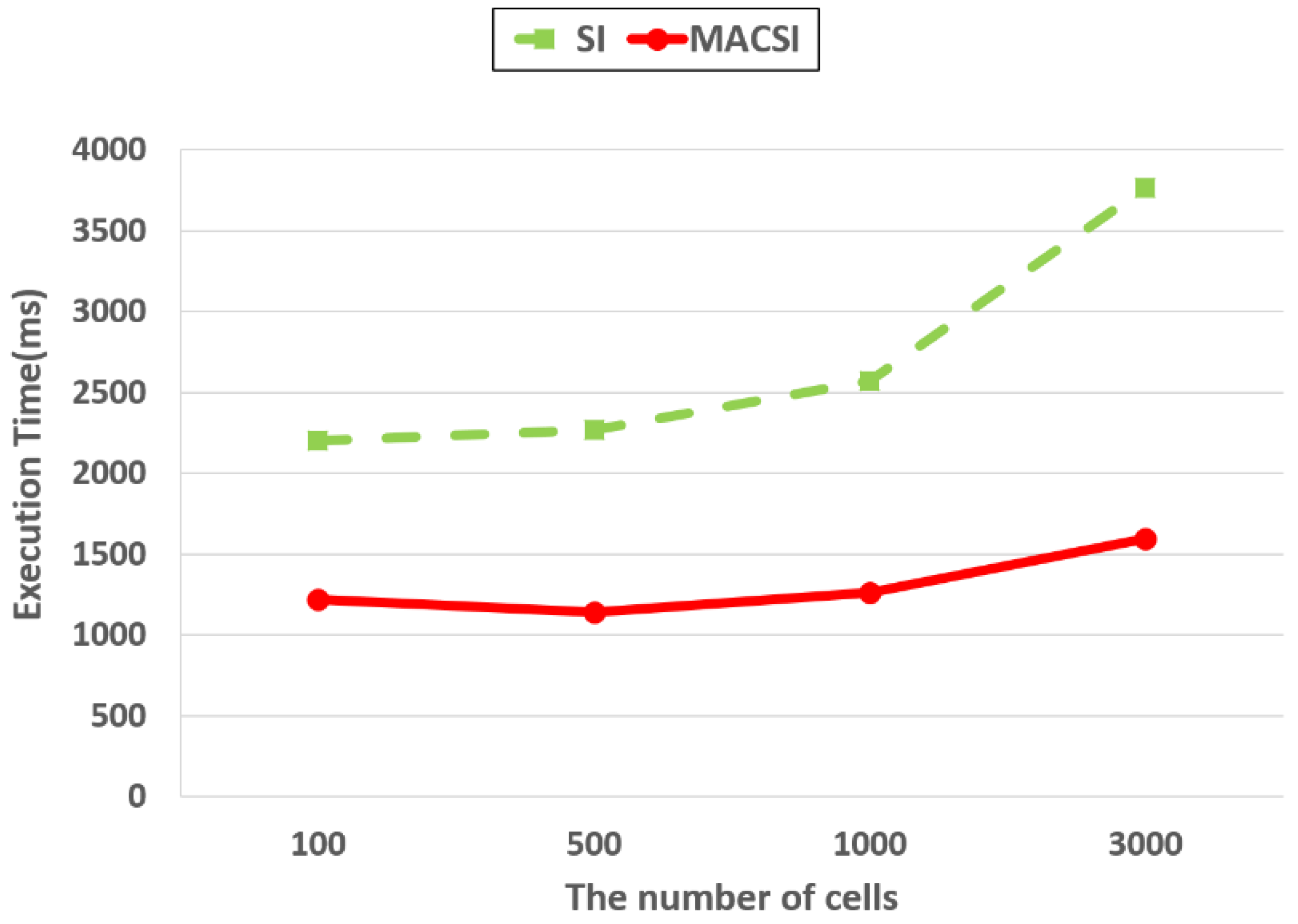
Figure 26.
The effect of cell number on the semantic trajectory query performance.
Figure 26.
The effect of cell number on the semantic trajectory query performance.
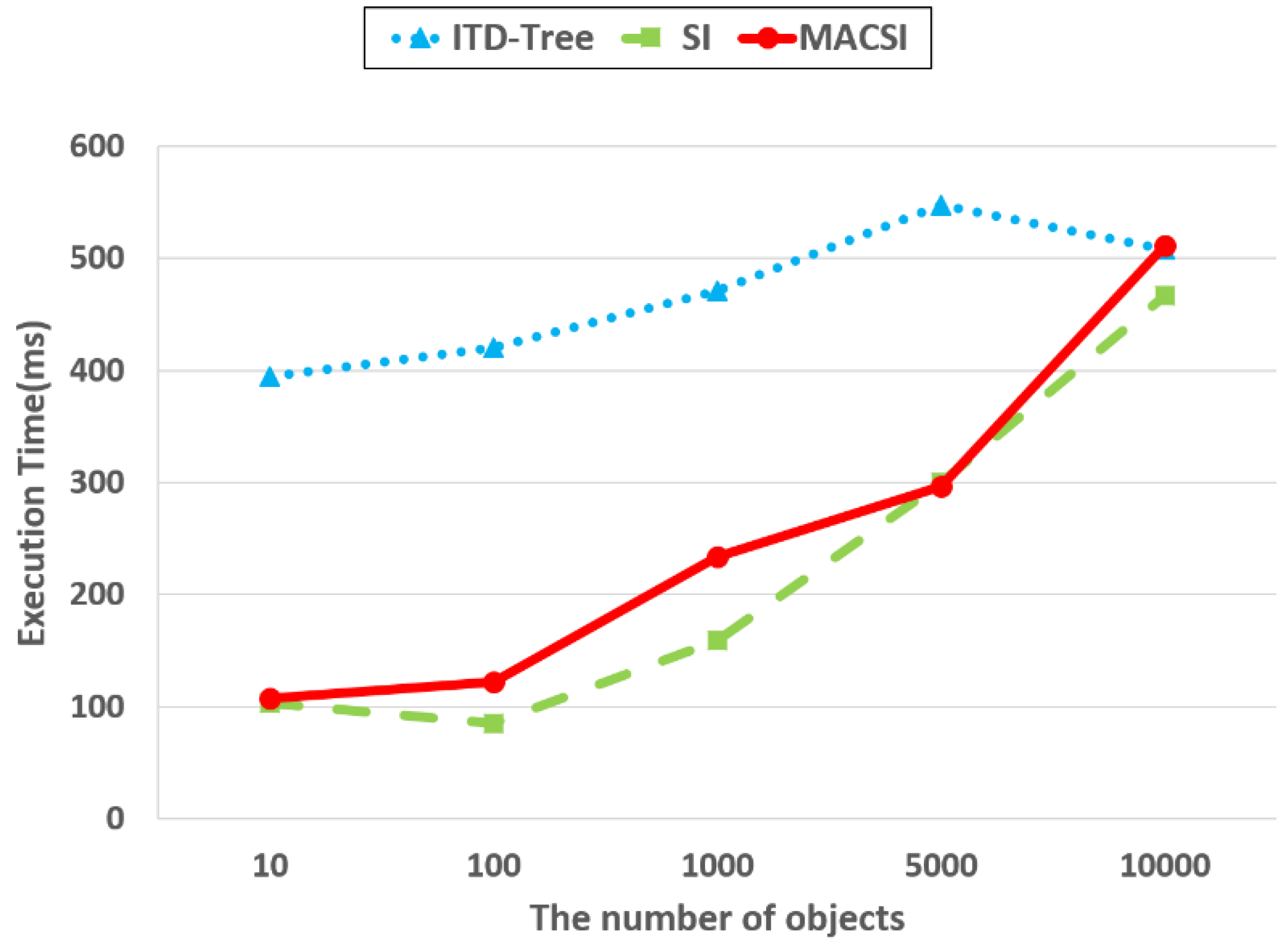
Figure 27.
The effect of object number on the semantic trajectory query performance.
Figure 27.
The effect of object number on the semantic trajectory query performance.
Figure 28.
The effect of cell number on the update performance.
Figure 28.
The effect of cell number on the update performance.
Figure 29.
The effect of object number on the update performance.
Figure 29.
The effect of object number on the update performance.
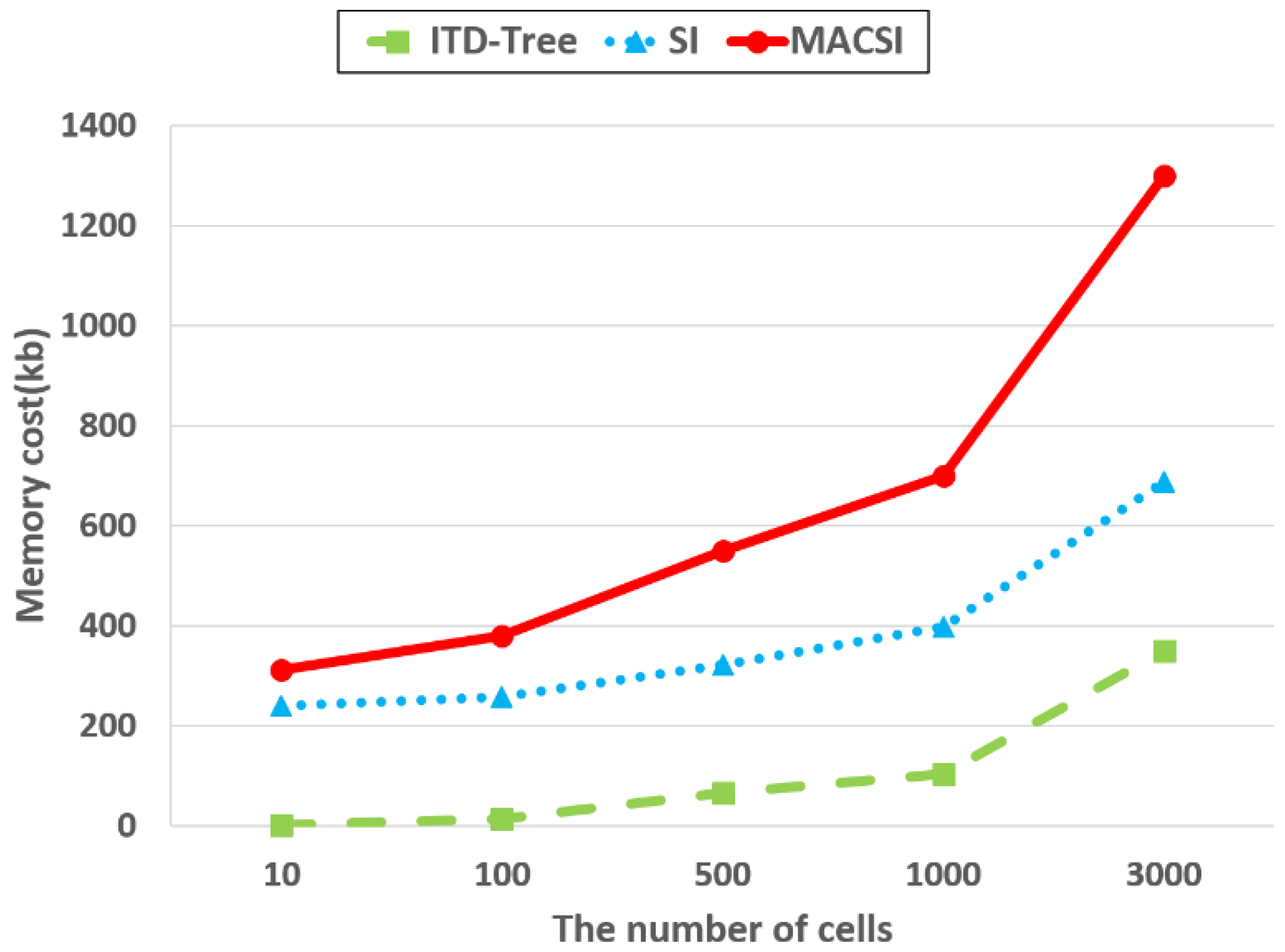
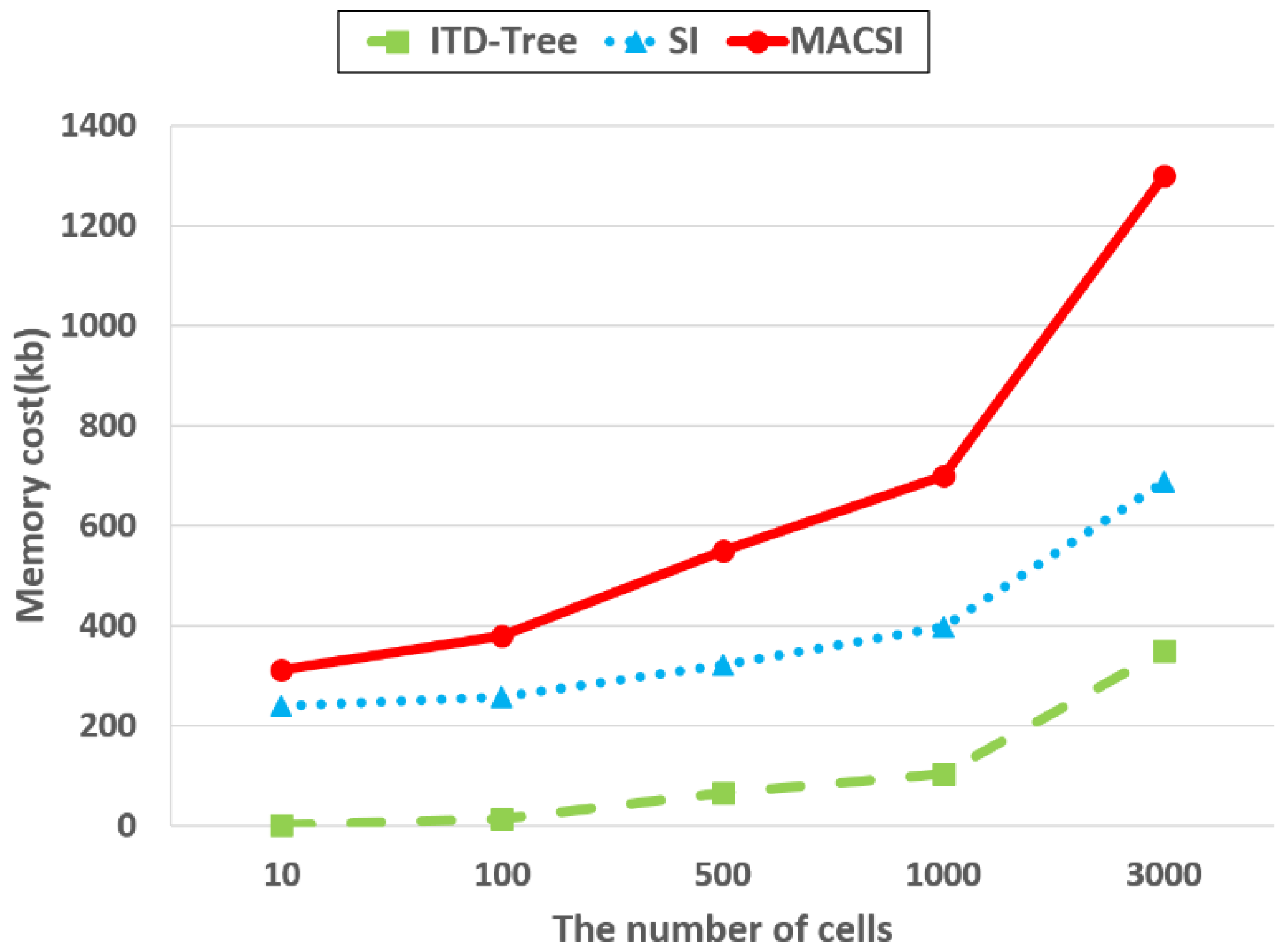
Figure 30.
The effect of cell number on memory costs.
Figure 30.
The effect of cell number on memory costs.
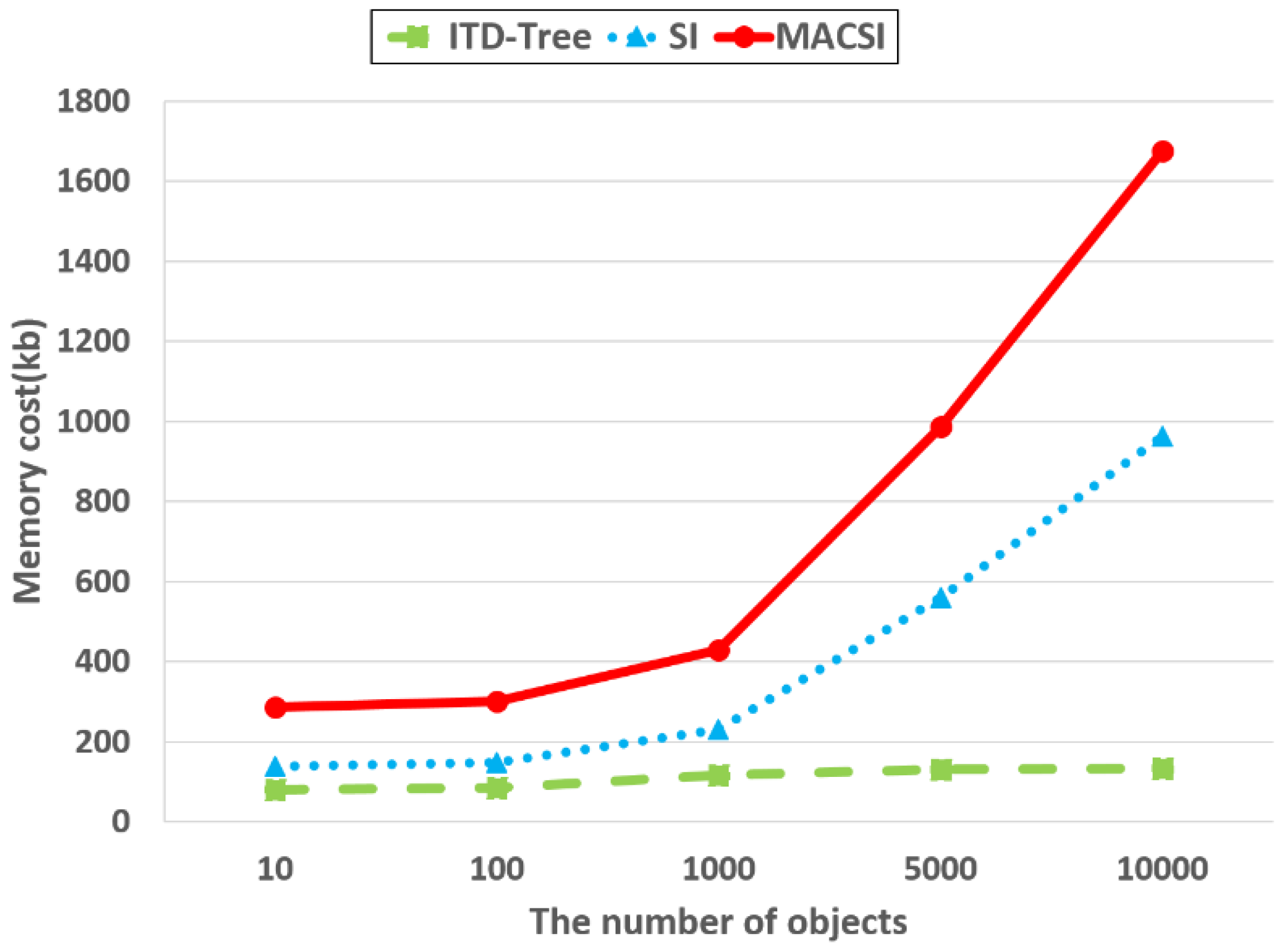
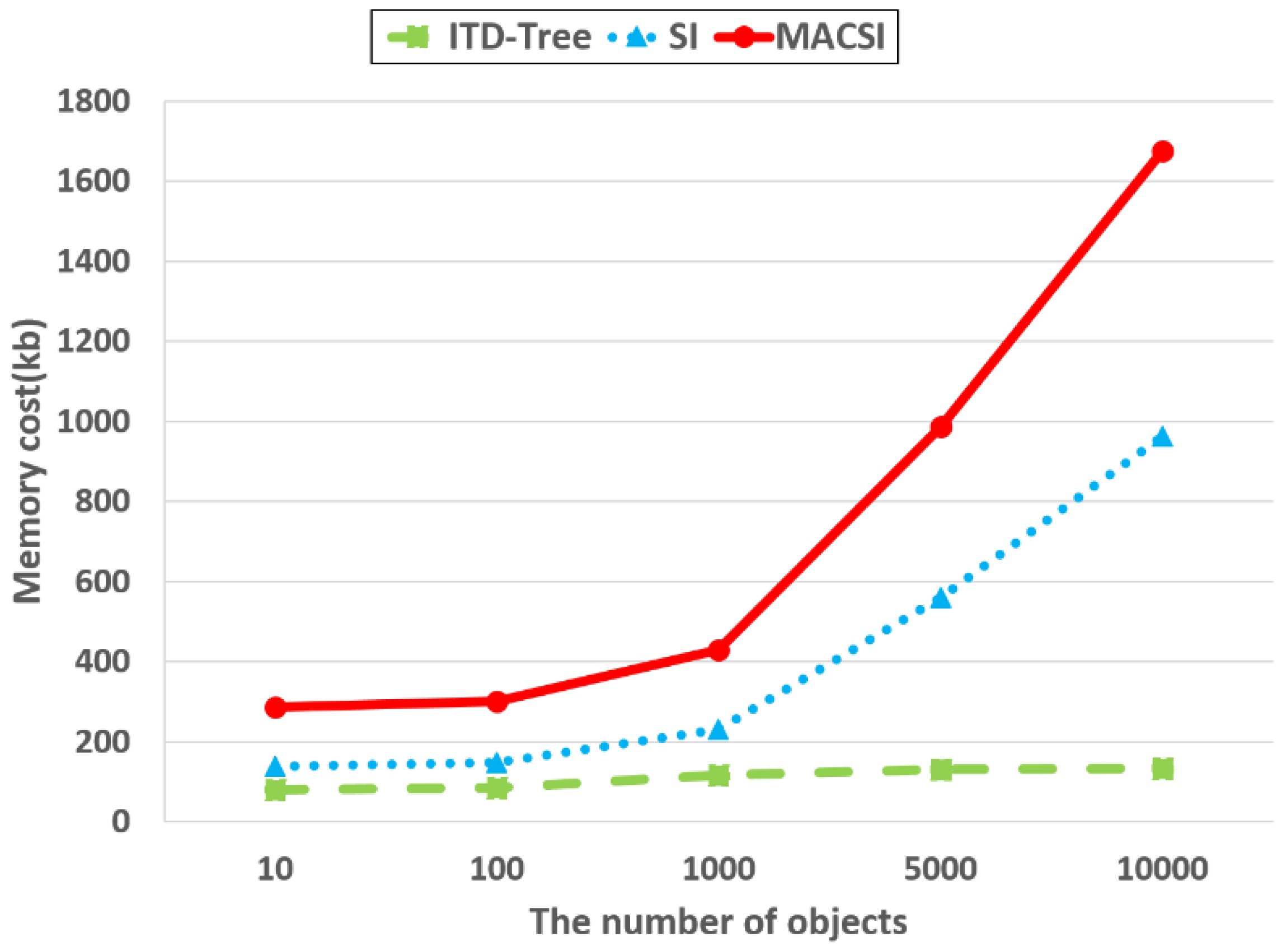
Figure 31.
The effect of object number on memory costs.
Figure 31.
The effect of object number on memory costs.
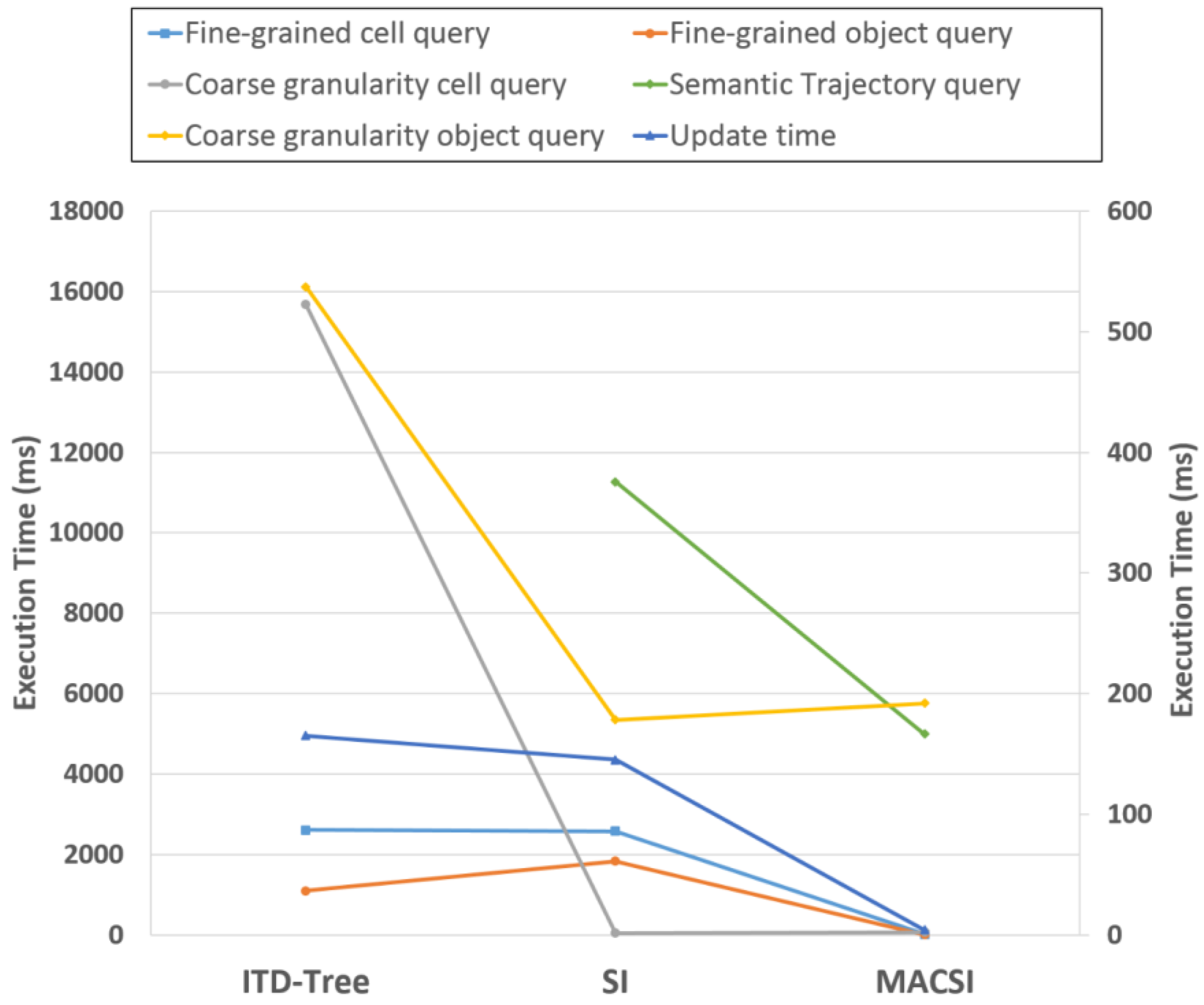
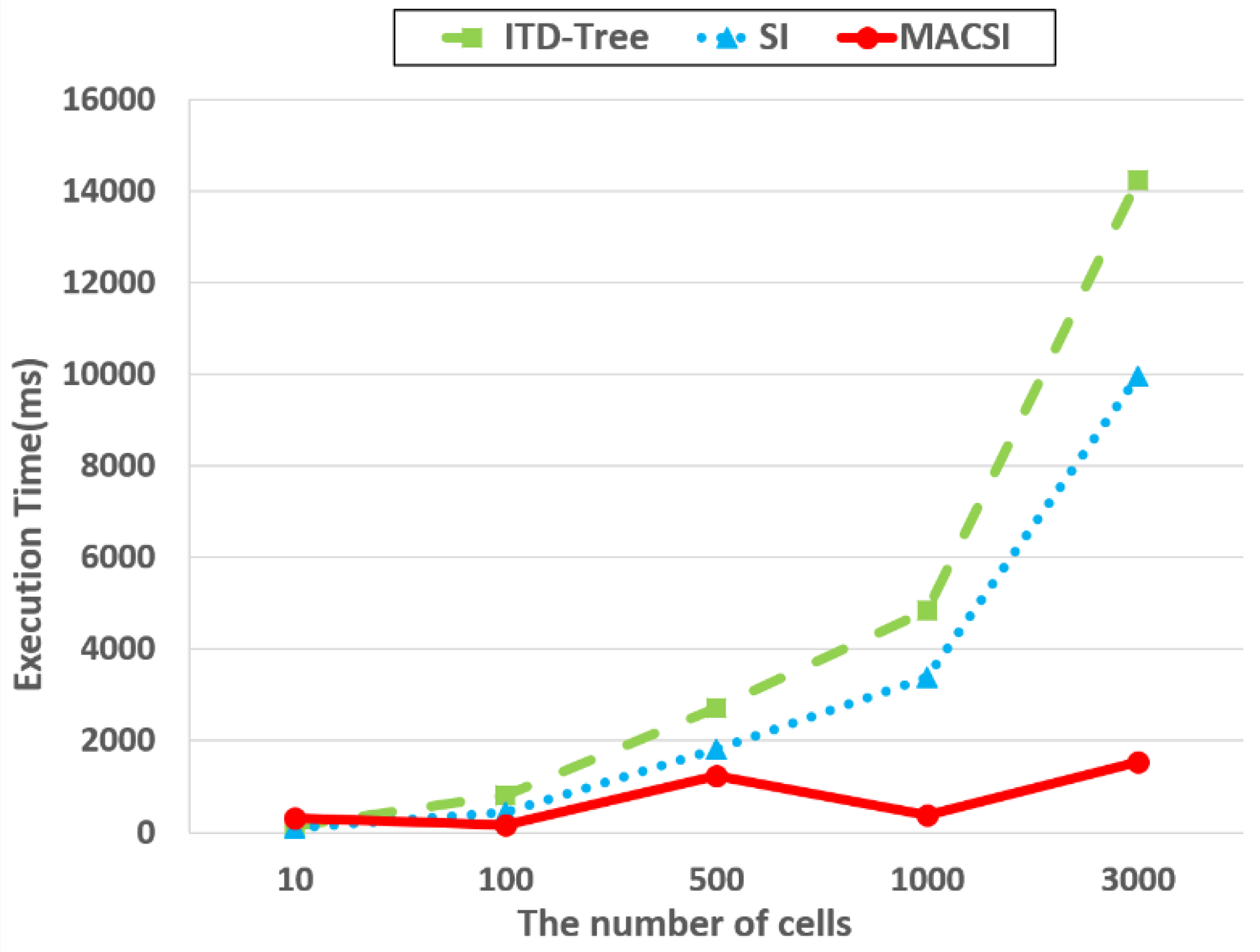
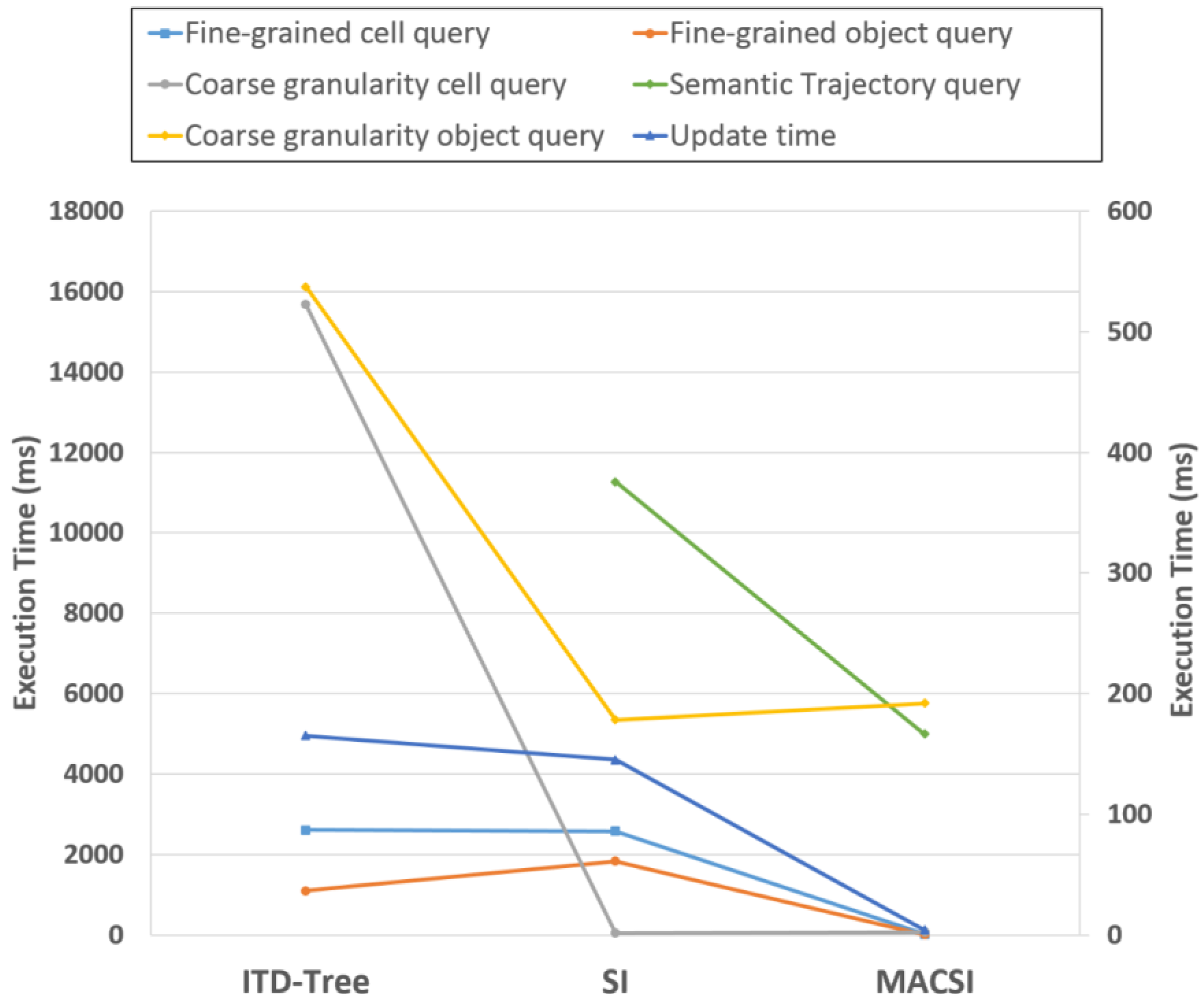
Figure 32.
Real dataset result. (ITD-Tree, Si and MACSI are distributed in the abscissa axis, respectively. It is obvious that the overall trend of the system response time is ITD-Tree > SI > MACSI. Additionally, MACSI showed better performance than ITD-Tree and SI in semantic cells, and objects’ queries as well as updates).
Figure 32.
Real dataset result. (ITD-Tree, Si and MACSI are distributed in the abscissa axis, respectively. It is obvious that the overall trend of the system response time is ITD-Tree > SI > MACSI. Additionally, MACSI showed better performance than ITD-Tree and SI in semantic cells, and objects’ queries as well as updates).
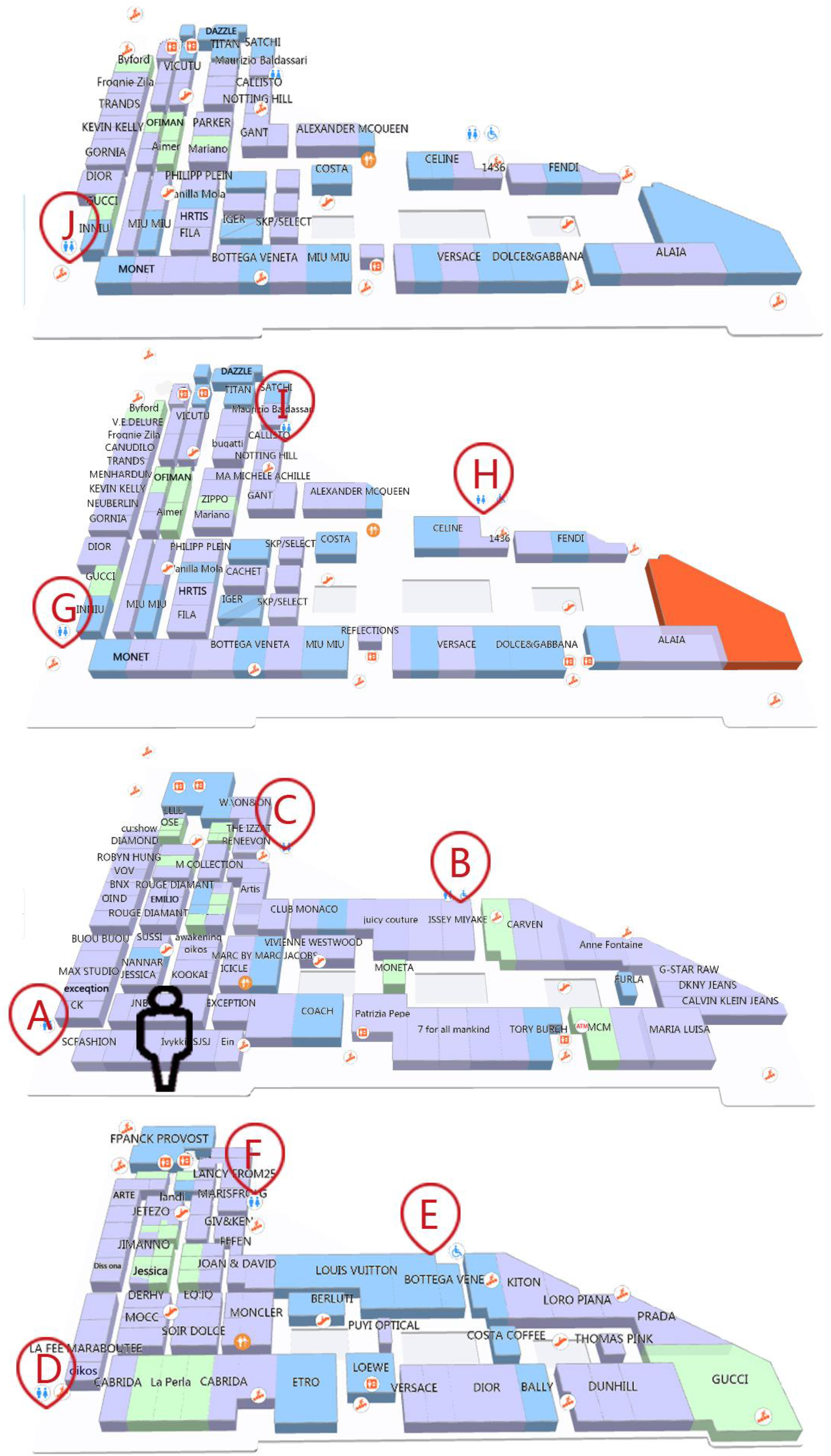
Figure 33.
The positions of the moving object and locations of the search results. (The black humanoid is the location of the moving object, and (A–J) denote the 10-nearest lavatories to the moving object; (A–C) are located on the 3rd floor; (D–F) are on the 2nd floor; (G–I) are the 4th floor; and (J) is on the 5th floor.)
Figure 33.
The positions of the moving object and locations of the search results. (The black humanoid is the location of the moving object, and (A–J) denote the 10-nearest lavatories to the moving object; (A–C) are located on the 3rd floor; (D–F) are on the 2nd floor; (G–I) are the 4th floor; and (J) is on the 5th floor.)
Table 1.
Notations used throughout this paper.
Table 1.
Notations used throughout this paper.
| Notation | Meaning |
|---|
| C | Cellular space |
| T | Time |
| O | Moving object |
| CID | Cell ID |
| FID | Floor ID |
| BID | Building ID |
| EDist(Oi, Oj) | The Euclidean distance between Oi and Oj |
| CDist(Oi, Oj) | The number of hops of the cells between Oi and Oj |
| RDist(Oi, Oj) | The actual distance between Oi and Oj |
| STree | Semantic tree |
| SRoot | The root of semantic tree |
| SiTr | Semantic trajectory |
Table 2.
Indoor positioning log.
Table 2.
Indoor positioning log.
| ID | Cell | Start Time | End Time |
|---|
| p1 | C1 | St1 | Et1 |
| p2 | C2 | St2 | Et2 |
| … | … | … | Et3 |
| pn | Cn | Stn | Etn |
Table 3.
Queries used in the experiments conducted in the present study.
Table 3.
Queries used in the experiments conducted in the present study.
| Query Type | Examples |
|---|
| Coarse-grained semantic objects query | Return all the security guards in a shopping mall |
| Fine-grained semantic objects query | Return very important person (VIP) customers in a shopping mall whose birthdays are today |
| Coarse-grained semantic cells query | Return the lavatory nearest to object O1 |
| Fine-grained semantic cells query | Return the restaurant that sells fried squid rings nearest to object O1 |
| Complex semantic trajectories query | Return objects that habitually go to the movie theater after shopping in a shopping mall |
Table 4.
The adjacency distance table.
Table 4.
The adjacency distance table.
| | C1 | C2 | C3 | C4 | C5 | … | C19 |
|---|
| C1 | 0 | 2 | 3 | 4 | 2 | … | 3 |
| C2 | 2 | 0 | 1 | 2 | 2 | … | 3 |
| C3 | 3 | 1 | 0 | 1 | 3 | … | 4 |
| C4 | 4 | 2 | 1 | 0 | 4 | … | 5 |
| C5 | 2 | 2 | 3 | 4 | 0 | … | 3 |
| … | … | … | … | … | … | … | … |
| C19 | 3 | 3 | 4 | 5 | 3 | … | 0 |
Table 5.
The adjacency distance table.
Table 5.
The adjacency distance table.
| | C1 | C2 | … | C18 | C19 | C20 | C21 | C22 |
|---|
| C1 | 0 | 3 | … | 5 | 7 | 8 | 8 | 8 |
| C2 | 3 | 0 | … | 4 | 6 | 7 | 7 | 7 |
| C18 | 5 | 4 | … | 0 | 6 | 1 | 5 | 7 |
| C19 | 7 | 6 | … | 6 | 0 | 5 | 1 | 1 |
| C20 | 6 | 5 | … | 1 | 5 | 0 | 4 | 6 |
| C21 | 8 | 7 | … | 5 | 1 | 4 | 0 | 2 |
| C22 | 8 | 7 | … | 7 | 1 | 6 | 2 | 0 |
Table 6.
The actual arrival times of ITD-Tree and SI to the 10-nearest lavatories in the real dataset.
Table 6.
The actual arrival times of ITD-Tree and SI to the 10-nearest lavatories in the real dataset.
| Order | Floor Number | Destination | Time |
|---|
| 1 | 3 | A | 22 s |
| 2 | 3 | B | 75 s |
| 3 | 3 | C | 105 s |
| 4 | 2 | D | 47 s |
| 5 | 2 | E | 135 s |
| 6 | 2 | F | 165 s |
| 7 | 4 | G | 46 s |
| 8 | 4 | H | 132 s |
| 9 | 4 | I | 172 s |
| 10 | 5 | J | 70 s |
Table 7.
The actual arrival times of MACSI to the 10-nearest lavatories in the real dataset.
Table 7.
The actual arrival times of MACSI to the 10-nearest lavatories in the real dataset.
| Order | Floor Number | Destination | Time |
|---|
| 1 | 3 | A | 22 s |
| 2 | 2 | D | 47 s |
| 3 | 4 | G | 46 s |
| 4 | 3 | B | 75 s |
| 5 | 5 | J | 70 s |
| 6 | 3 | C | 105 s |
| 7 | 2 | E | 135 s |
| 8 | 4 | H | 132 s |
| 9 | 2 | F | 165 s |
| 10 | 4 | I | 172 s |














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}