
A Novel Spatial-Temporal Voronoi Diagram-Based Heuristic Approach for Large-Scale Vehicle Routing Optimization with Time Constraints





Abstract
:1. Introduction
2. Literature Review
2.1. Heuristic Algorithms for the VRPTW
2.2. Integration of Vehicle Routing Optimization and GIS
3. The VRPTW and the Spatial-Temporal Voronoi Diagram
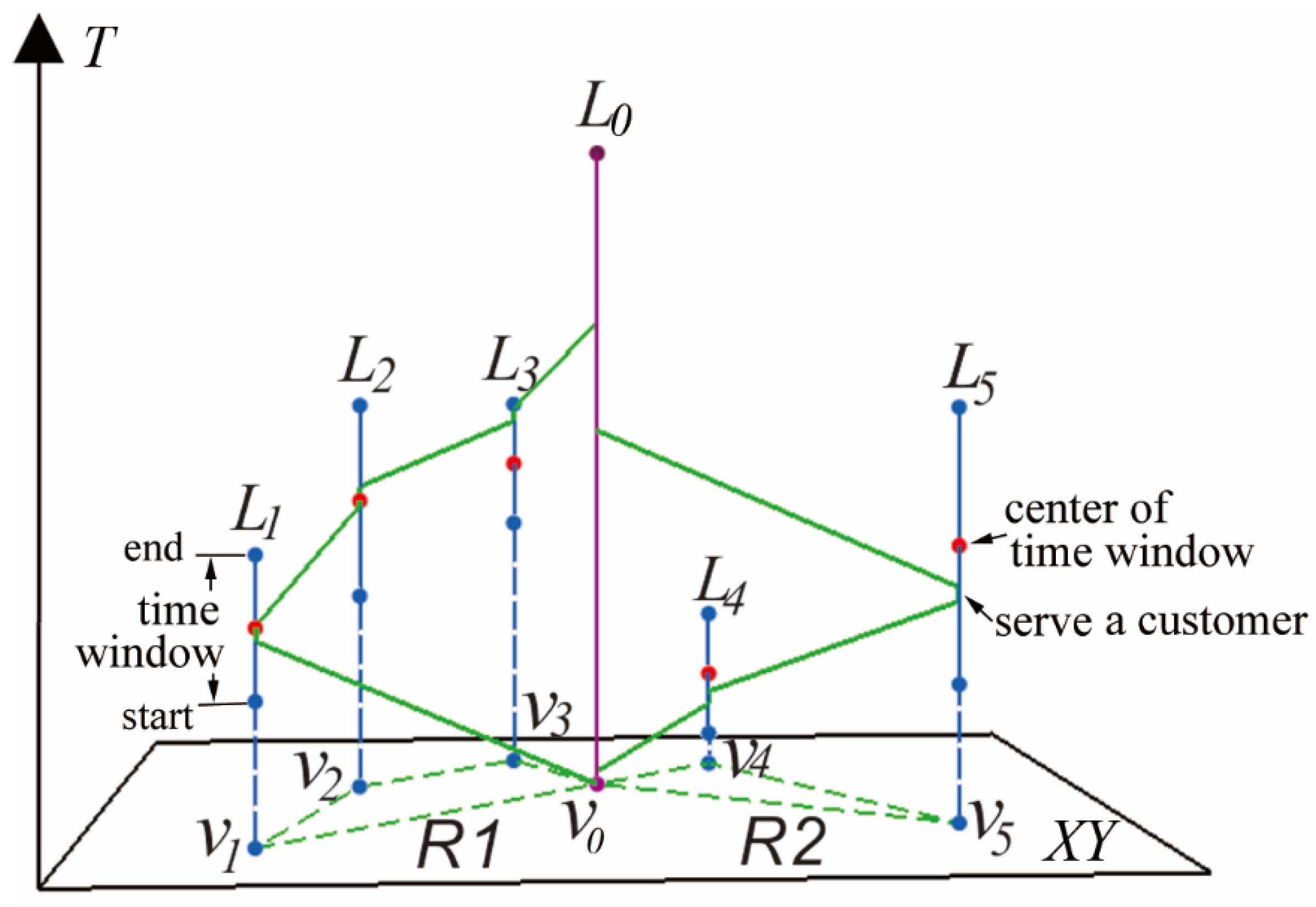
3.1. The VRPTW
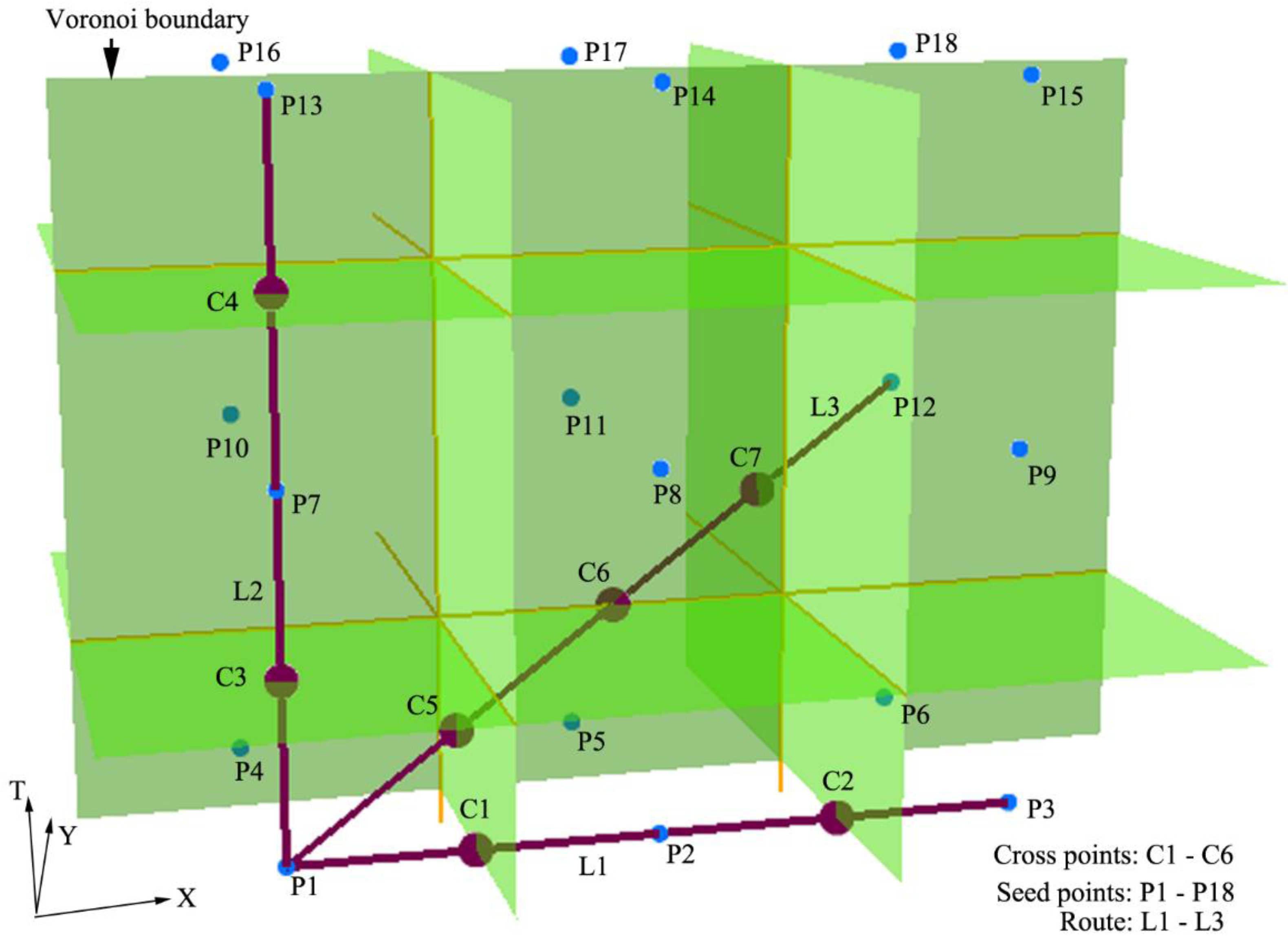
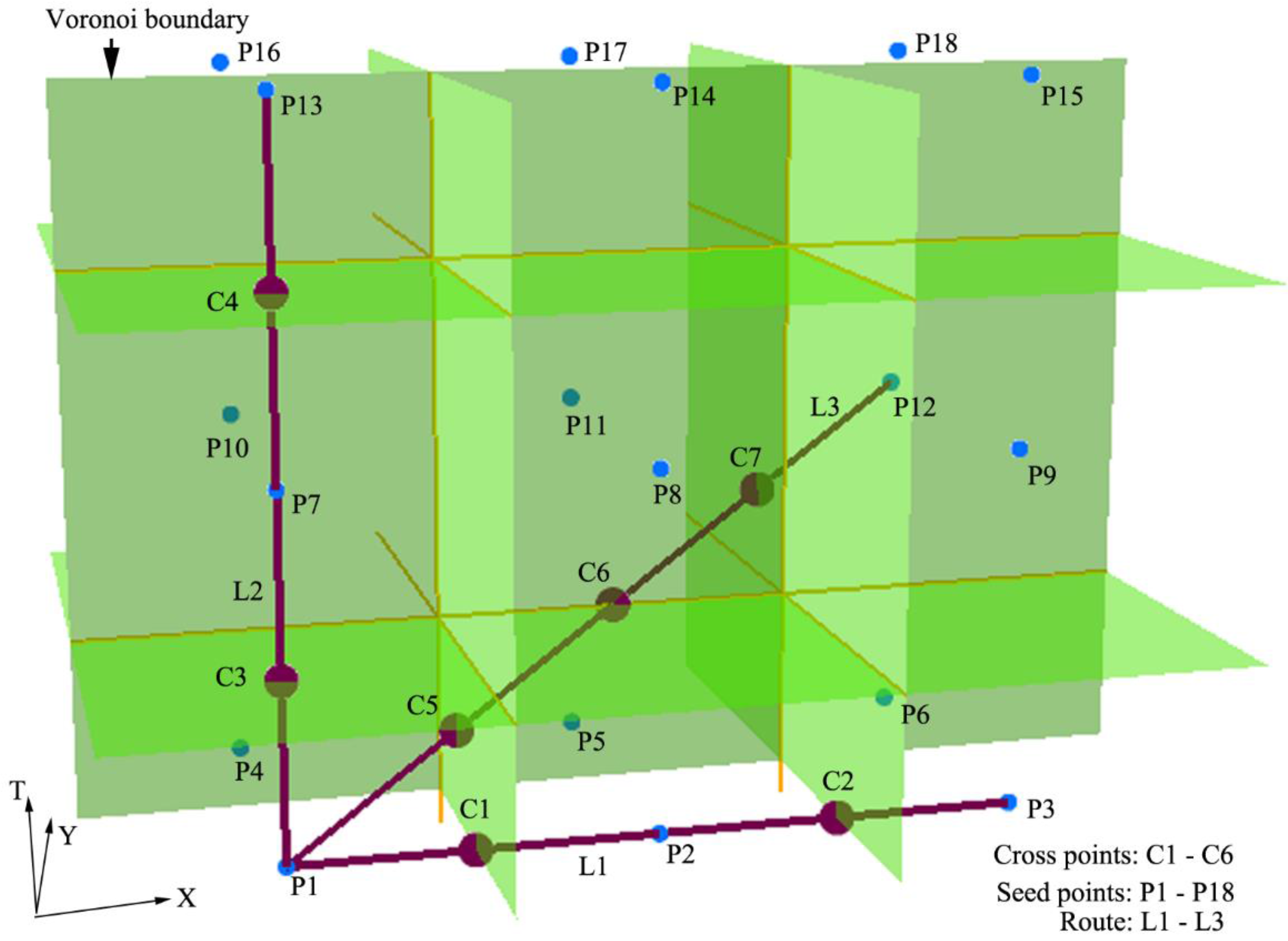
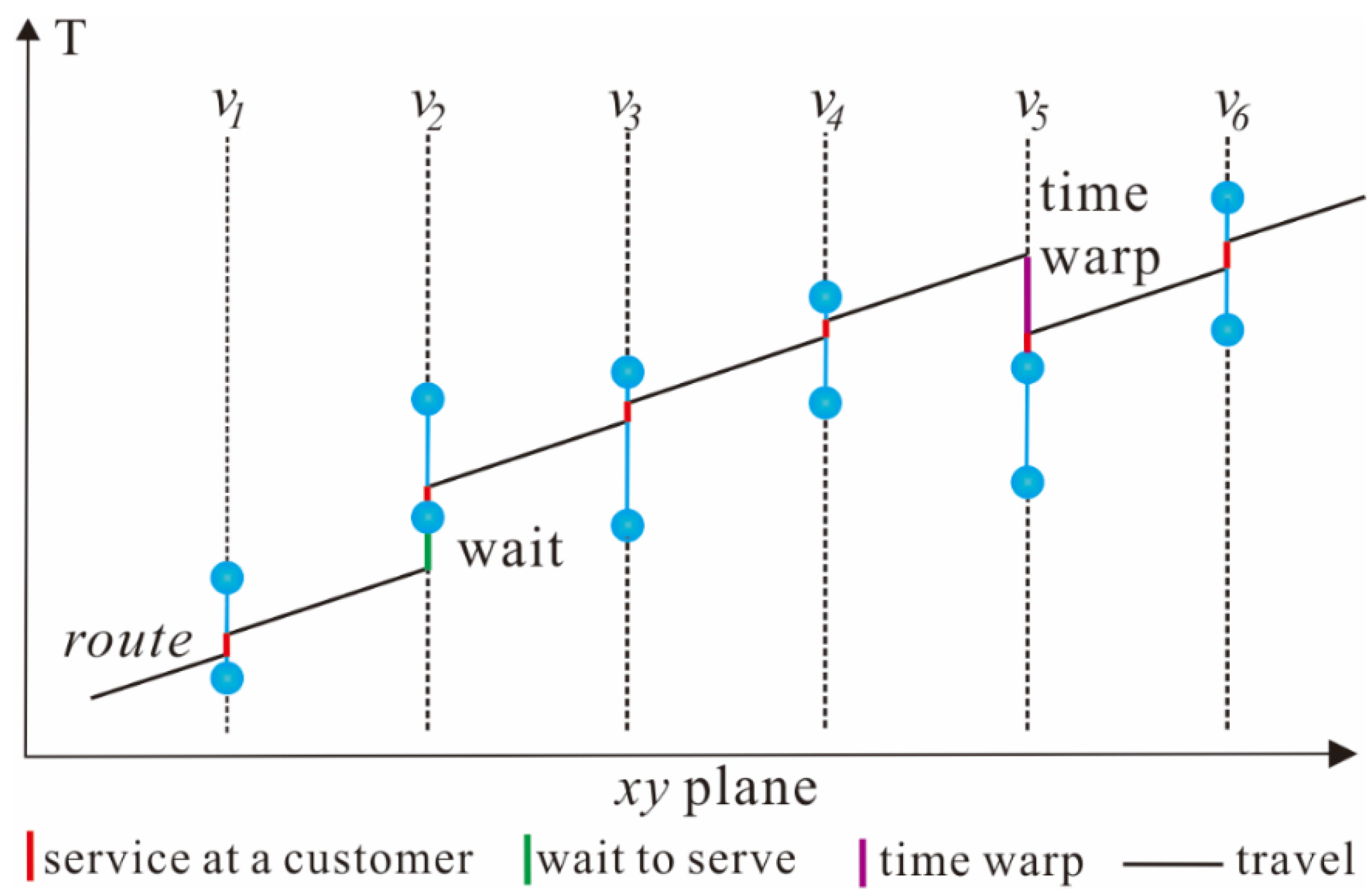
3.2. The Spatial-Temporal Voronoi Diagram for VRPTWs
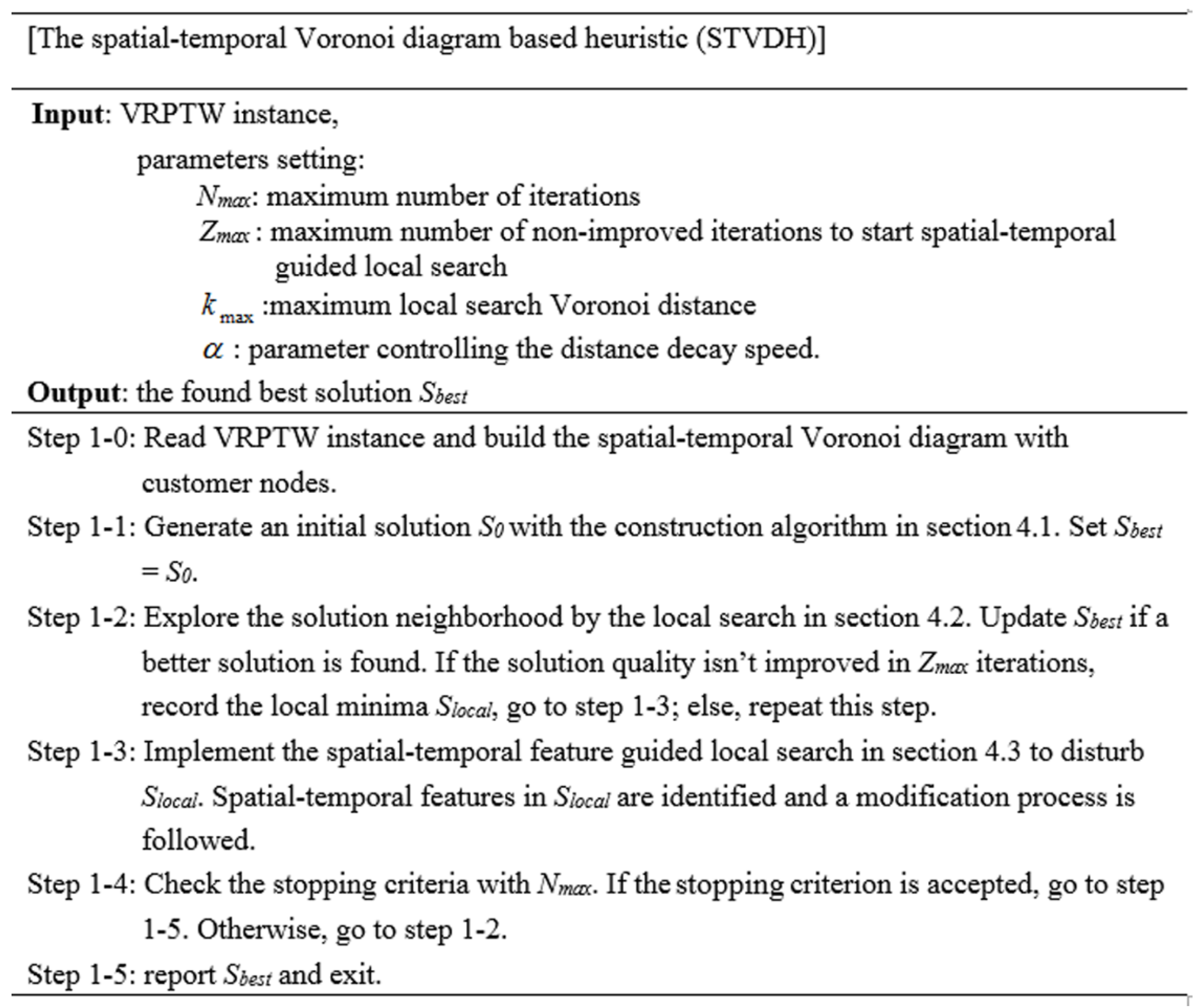
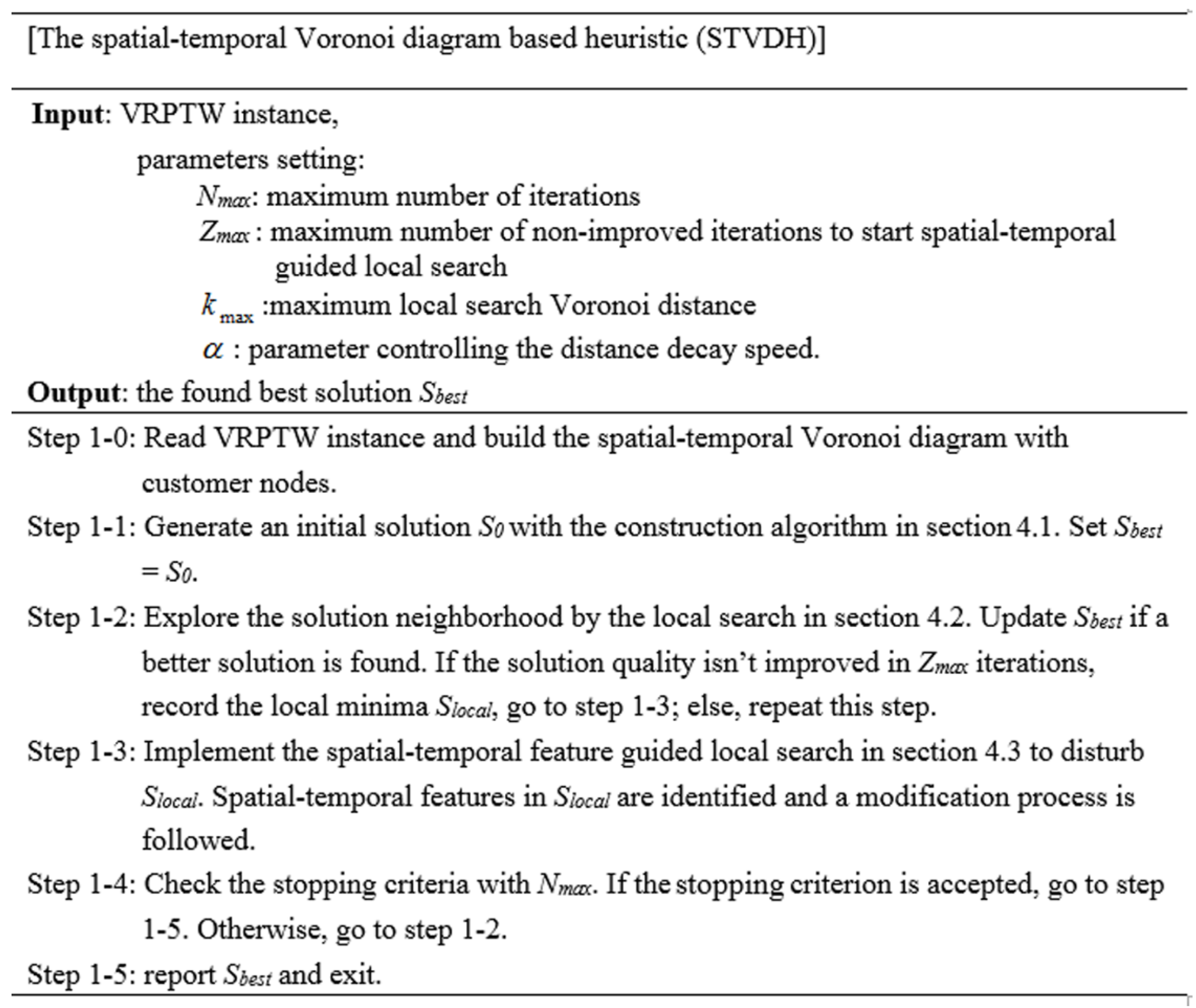
4. The Spatial-Temporal Voronoi Diagram-Based Heuristic
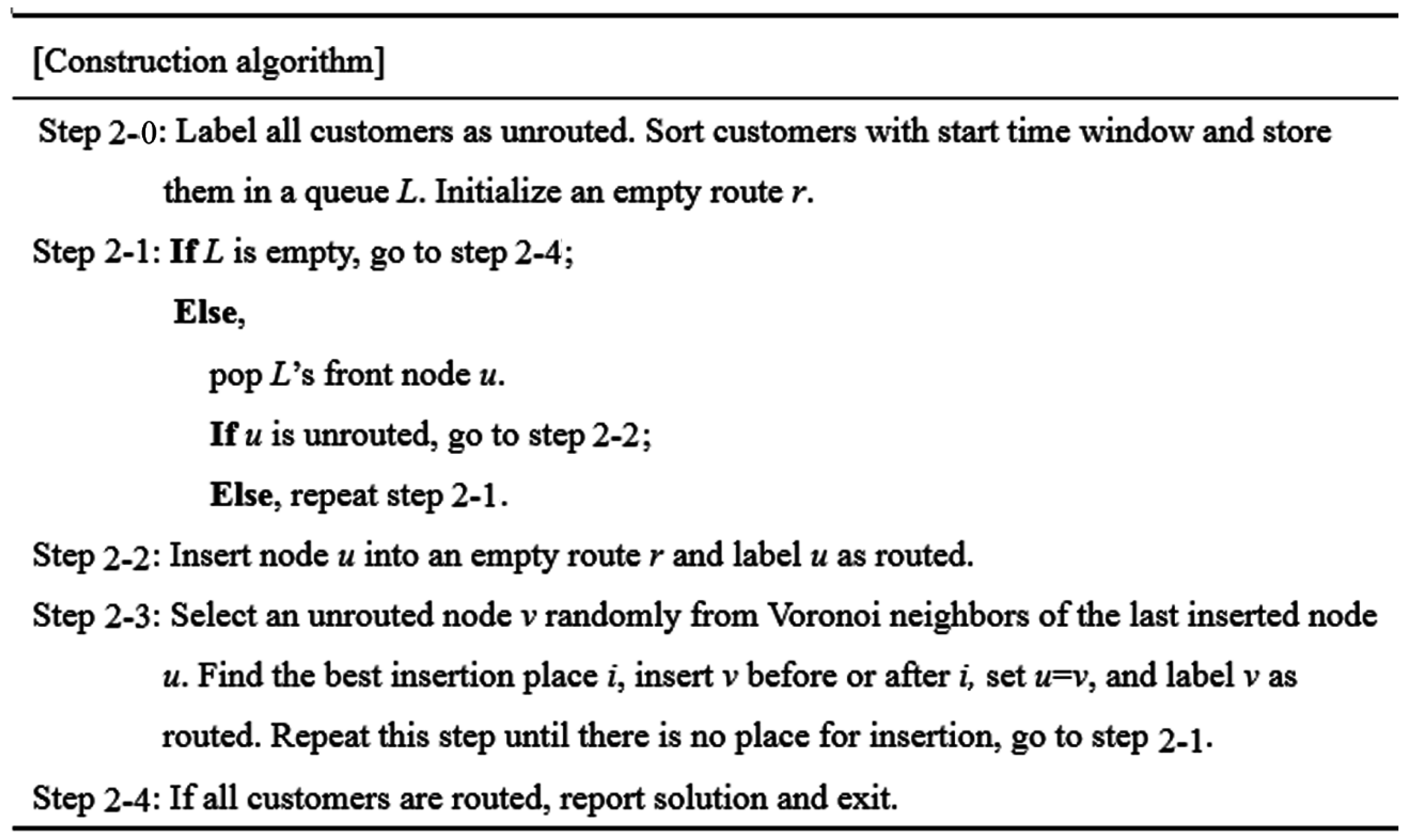
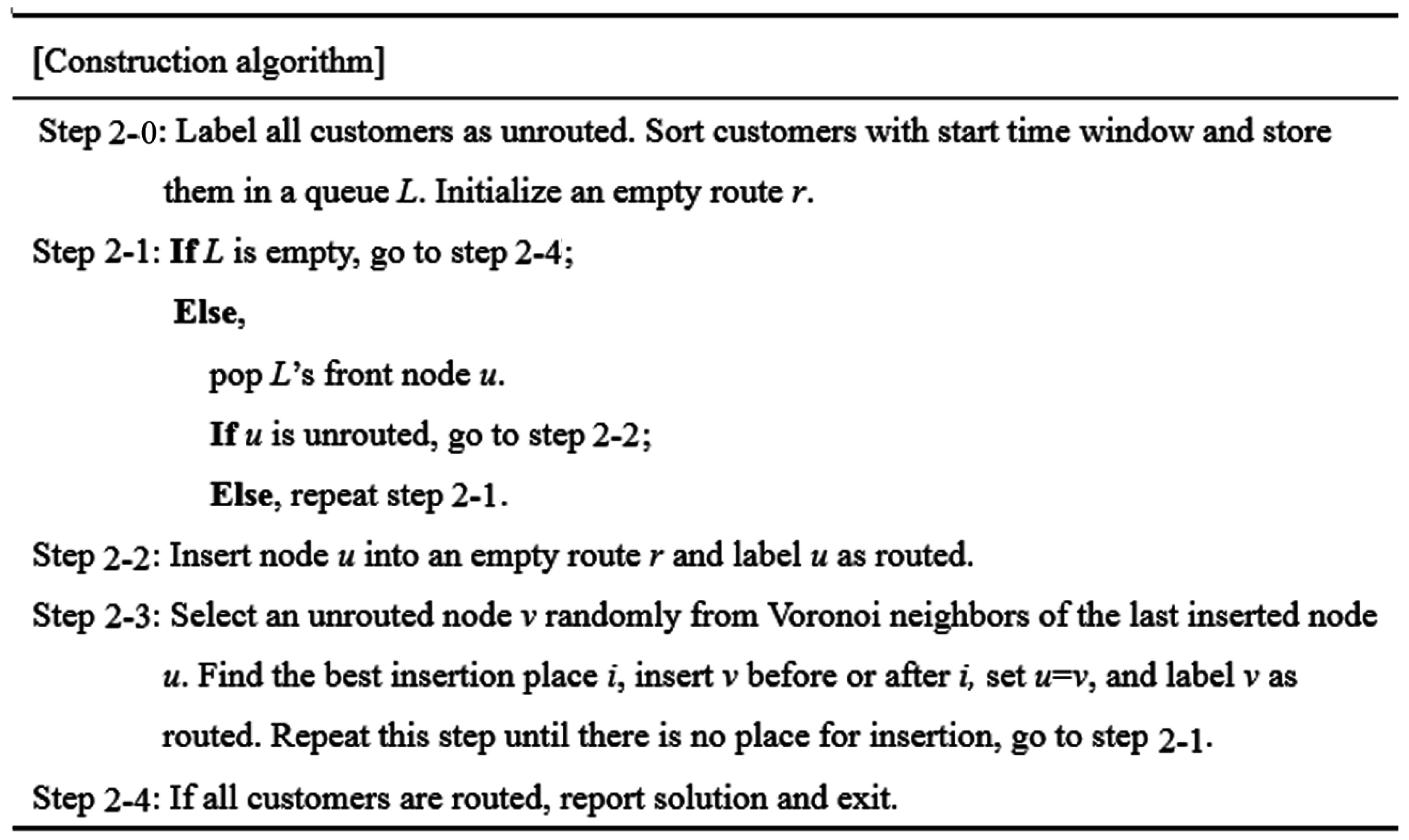
4.1. The Construction Algorithm
4.2. Local Search
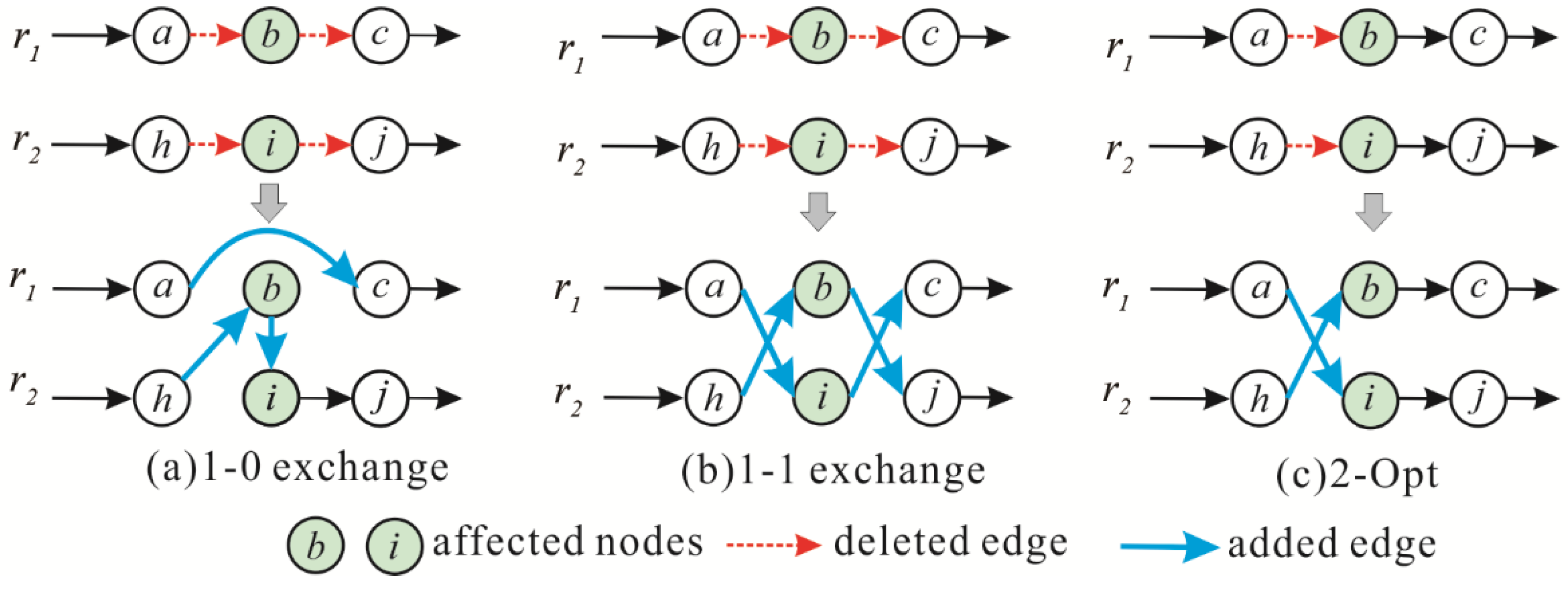
- 1-0 exchange move injects a node from the original place and inserts it after another. As Figure 5a shows, node b is removed from its current position and inserted before node i.
- 1-1 exchange move swaps positions of a pair of nodes. As Figure 5b shows, the places of nodes b and i are swapped.
- 2-Opt move swaps the ends of two routes after the positions of a pair of nodes. As Figure 5c illustrates, the partial routes after b and i are swapped.
4.2.1. The Spatial-Temporal Distance Decay Strategy
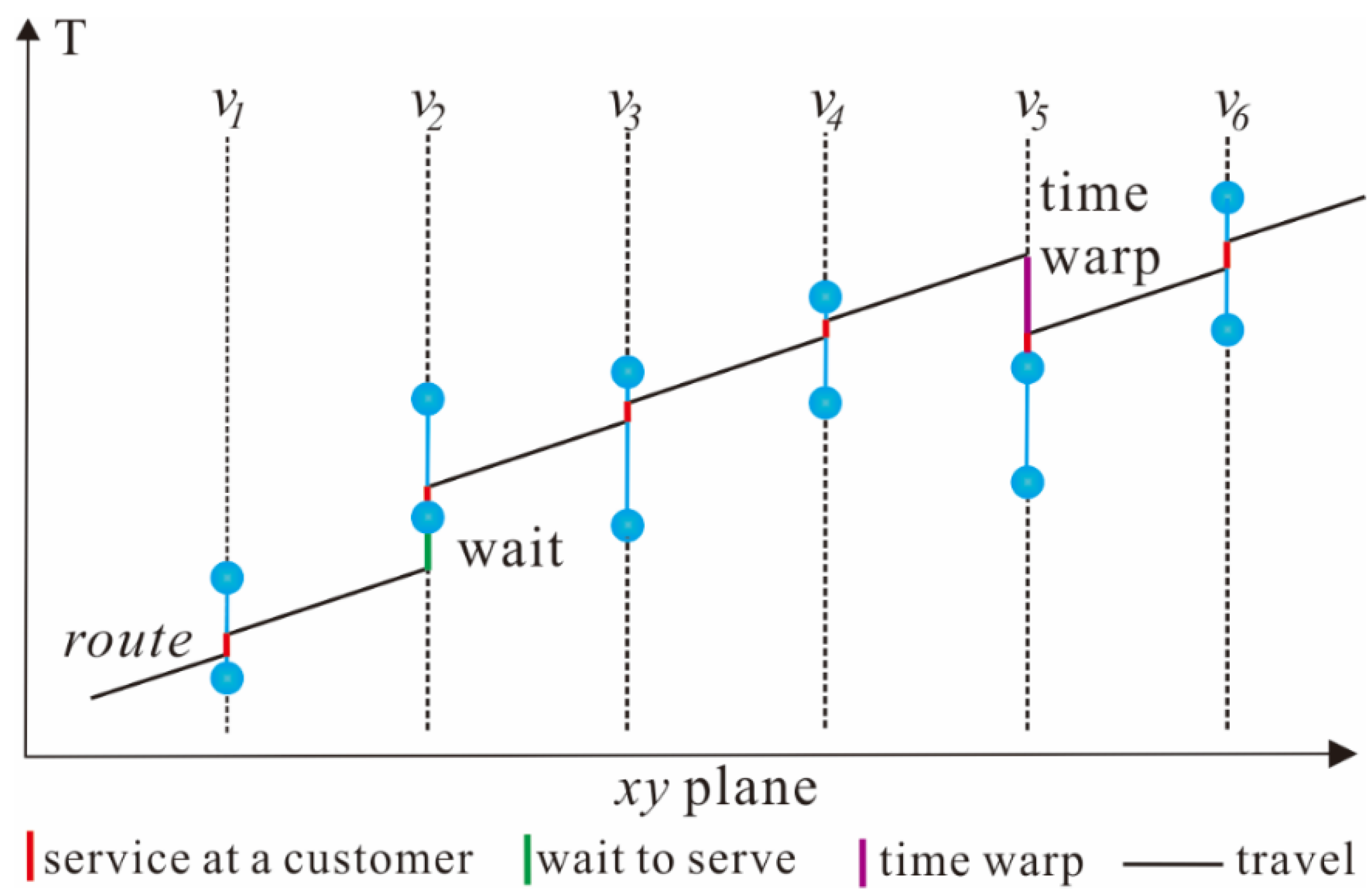
4.2.2. Time Warp Operation
4.2.3. Acceptance Criterion
4.3. Spatial-Temporal Features-Guided Search
4.3.1. Spatial-Temporal Features
- Time-window violation nodes
- Longest-distance nodes
- The smallest route’s nodes
4.3.2. Removal Algorithm
4.3.3. Insertion Algorithm
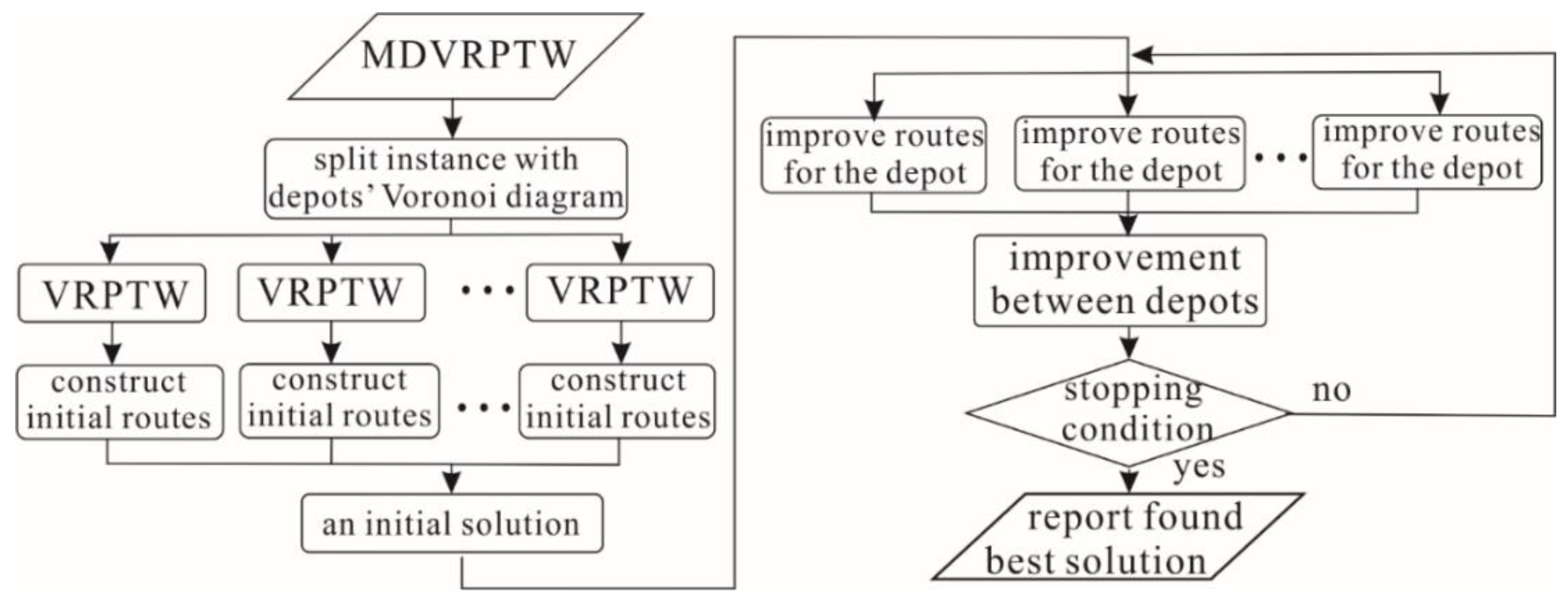
4.4. An Extension of the Solving Algorithm for MDVRPTW
5. Experiment and Comparison
5.1. Test VRPTW and MDVRPTW Problem Dataset
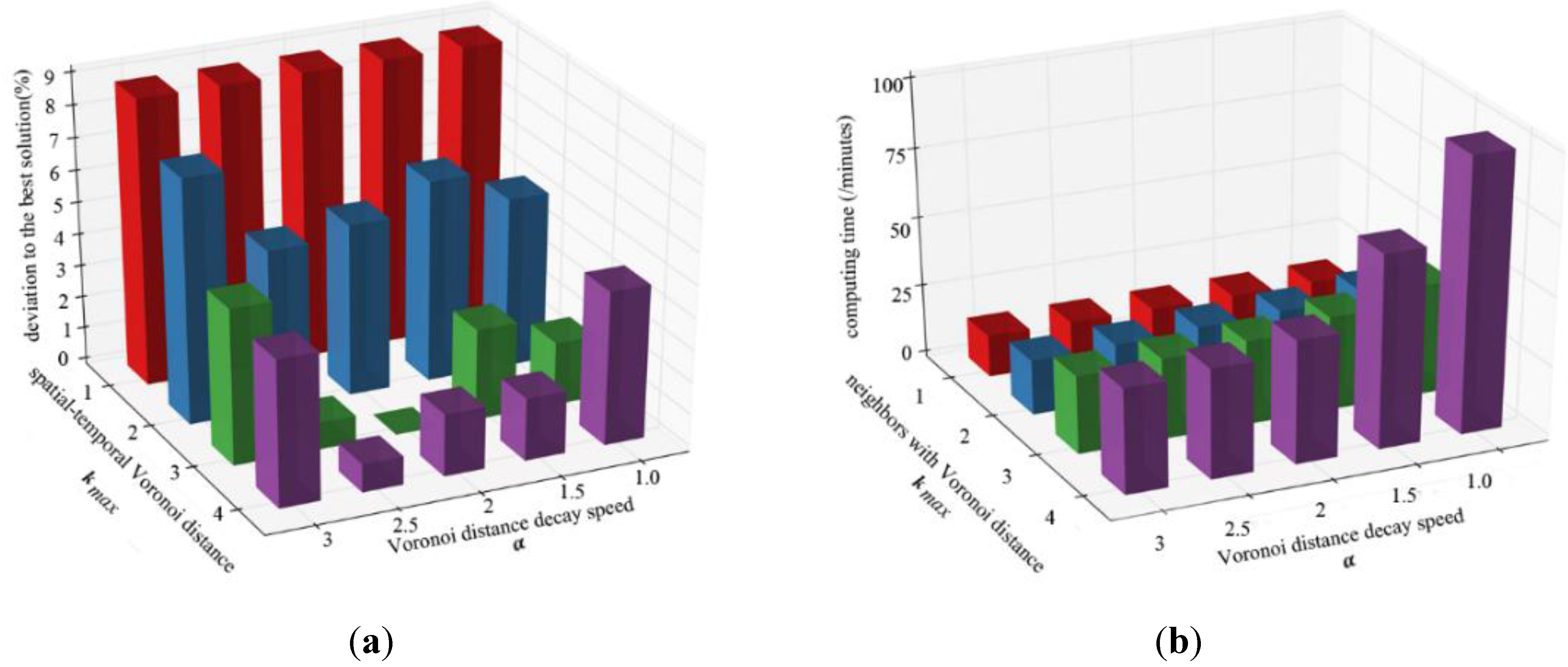
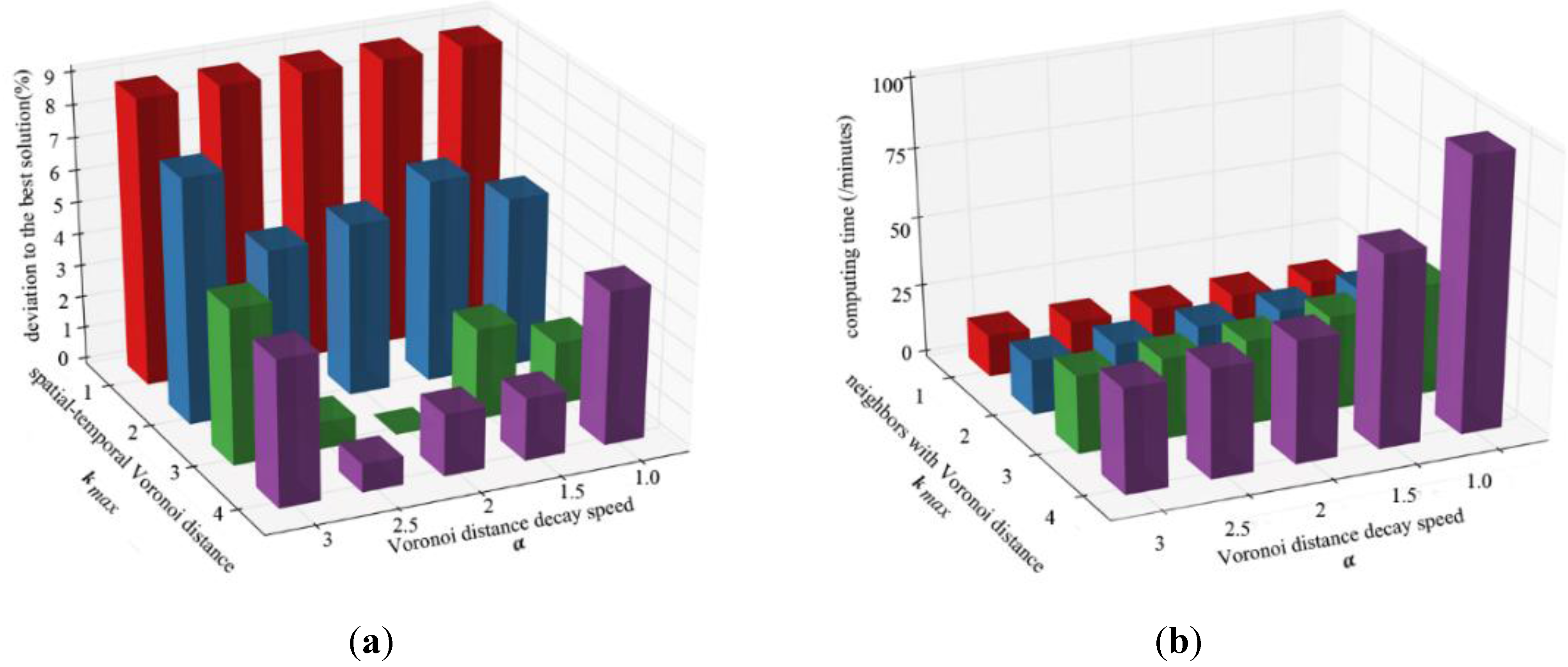
5.2. Parameter Tuning

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Parameter | Setting |
|---|---|---|
| Nmax | the maximum number of iterations | 5000N |
| Zmax | the maximum number of iterations to start the spatial-temporal features guided search | 100N |
| kmax | the maximum searching Voronoi neighbors | 1, 2, 3, 4, 5 |
| α | Voronoi distance decaying speed | (0, 4) |
5.3. The Results of the Solomon [15] and Gehring and Homberger [53] VRPTW Benchmarks
| Instance | N | AGEA | HGSDAC | VRPEJ | STVDH | STVDH |
|---|---|---|---|---|---|---|
| 1 run | Best 5 run | Best 10 run | AVG 10 run | Best 10 run | ||
| R1 | 100 | 11.92|1211.43 | 11.92|1210.69 | 11.92|1214.67 | 11.92|1213.85 | 11.92|1212.65 |
| R2 | 100 | 2.73|954.05 | 2.73|951.51 | 2.73|954.10 | 2.73|954.01 | 2.73|953.20 |
| C1 | 100 | 10.0|828.38 | 10.0|828.38 | 10.0|828.38 | 10.0|828.38 | 10.0|828.38 |
| C2 | 100 | 3.0|589.86 | 3.0|589.36 | 3.0|589.86 | 3.0|589.86 | 3.0|589.86 |
| RC1 | 100 | 11.50|1384.83 | 11.5|1384.17 | 11.5|1387.81 | 11.5|1386.93 | 11.5|1386.01 |
| RC2 | 100 | 3.25|1121.26 | 3.25|1119.24 | 3.25|1127.38 | 3.25|1126.49 | 3.25|1125.72 |
| CNV | 405 | 405 | 405 | 405 | 405 | |
| CTD | 57,254.73 | 57,195 | 57,366.96 | 57,341.97 | 57,305.10 | |
| T(/min) | 180 | 2.68 | 3.62 | 0.91 | 0.9 | |
| T2(/min) | 52.3 | 1.56 | 3.62 | 0.91 | 0.9 |
| Instance | N | AGEA | HGSDAC | VRPEJ | STVDH | STVDH |
|---|---|---|---|---|---|---|
| 1 run | Best 5 run | Best 10 run | AVG 10 run | Best 10 run | ||
| R1 | 200 | 18.2|3640.11 | 18.2|3613.16 | 18.2|3664.28 | 18.2|3653.24 | 18.2|3617.54 |
| R2 | 200 | 4.0|2941.99 | 4.0|2929.41 | 4.0|2938.53 | 4.0|2967.87 | 4.0|2938.53 |
| C1 | 200 | 18.9|2721.90 | 18.9|2718.41 | 18.9|2749.18 | 18.9|2758.67 | 18.9|2721.47 |
| C2 | 200 | 6.0|1833.36 | 6.0|1831.59 | 6.0|1880.47 | 6.0|1858.34 | 6.0|1835.52 |
| RC1 | 200 | 18.0|3224.63 | 18.0|3180.48 | 18.0|3205.81 | 18.0|3218.83 | 18.0|3179.89 |
| RC2 | 200 | 4.3|2554.33 | 4.3|2536.20 | 4.3|2574.92 | 4.3|2584.37 | 4.3|2544.44 |
| CNV | 694 | 694 | 694 | 694 | 694 | |
| CTD | 169,163 | 168,092 | 176,440.8 | 170,415.5 | 168,373.7 | |
| T(/min) | 90 | 8.40 | 5.4 | 1.22 | 1.2 | |
| T2(/min) | 26.7 | 4.9 | 5.4 | 1.22 | 1.2 | |
| R1 | 400 | 36.4|8514.11 | 36.4|8402.57 | 36.4|8615.29 | 36.4|8598.39 | 36.4|8446.36 |
| R2 | 400 | 8.0|6258.82 | 8.0|6152.92 | 8.0|6274.20 | 8.0|6279.13 | 8.0|6160.84 |
| C1 | 400 | 37.6|7273.90 | 37.6|7170.47 | 37.6|7339.88 | 37.6|7514.01 | 37.6|7186.10 |
| C2 | 400 | 11.7|3941.70 | 11.6|3950.95 | 11.7|4024.82 | 11.7|3995.21 | 11.7|3951.71 |
| RC1 | 400 | 36.0|8088.46 | 36.0|7907.14 | 36.0|8107.86 | 36.0|8098.32 | 36.0|7952.00 |
| RC2 | 400 | 8.40|5516.59 | 8.5|5215.21 | 8.4|5394.54 | 8.4|5393.49 | 8.4|5292.92 |
| CNV | 1381 | 1381 | 1381 | 1381 | 1381 | |
| CTD | 395,936 | 388,013 | 397,565.9 | 398,785.5 | 389,385.5 | |
| T(/min) | 180 | 34.1 | 9.8 | 2.30 | 2.3 | |
| T2(/min) | 53.3 | 19.8 | 9.8 | 2.30 | 2.3 | |
| R1 | 600 | 54.5|18,781.79 | 54.5|18,023.18 | 54.5|18,620.73 | 54.5|18,587.90 | 54.5|18,237.74 |
| R2 | 600 | 11.0|12,804.60 | 11.0|12,352.38 | 11.0|12,615.07 | 11.0|12,612.60 | 11.0|12,343.51 |
| C1 | 600 | 57.3|14,236.86 | 57.4|14,058.46 | 57.3|14,605.53 | 57.3|14,585.55 | 57.3|14,271.58 |
| C2 | 600 | 17.4|7729.80 | 17.4|7594.41 | 17.4|7748.47 | 17.4|7728.74 | 17.4|7589.10 |
| RC1 | 600 | 55.0|16,767.72 | 55.0|16,097.05 | 55.0|16,529.63 | 55.0|16,524.77 | 55.0|16,203.93 |
| RC2 | 600 | 11.4|11,311.81 | 11.5|10,511.86 | 11.4|10,879.26 | 11.4|10,824.00 | 11.4|10,626.35 |
| CNV | 2066 | 2068 | 2068 | 2066 | 2066 | |
| CTD | 816,326 | 786,793 | 809,986.9 | 808,635.65 | 792,722.1 | |
| T(/min) | 270 | 99.4 | 16.2 | 3.91 | 3.9 | |
| T2(/min) | 80.0 | 57.8 | 16.2 | 3.91 | 3.9 | |
| R1 | 800 | 72.8|32,734.57 | 72.8|31,311.38 | 72.8|32,281.48 | 72.8|32,108.01 | 72.8|31,540.28 |
| R2 | 800 | 15.0|20,618.21 | 15.0|19,933.39 | 15.0|20,448.88 | 15.0|20,339.05 | 15.0|19,969.61 |
| C1 | 800 | 75.2|25,911.44 | 75.4|24,876.93 | 75.2|26,097.53 | 75.1|25,972.63 | 75.1|25,490.85 |
| C2 | 800 | 23.4|11,835.72 | 23.3|11,475.05 | 23.4|11,897.31 | 23.3|11,826.41 | 23.3|11,621.87 |
| RC1 | 800 | 72.0|33,975.61 | 72.0|29,404.32 | 72.0|31,071.16 | 72.0|30,904.01 | 72.0|30,390.41 |
| RC2 | 800 | 15.5|17,536.54 | 15.4|16,495.82 | 15.5|16,878.69 | 15.4|16,733.78 | 15.4|16,467.01 |
| CNV | 2739 | 2739 | 2739 | 2736 | 2736 | |
| CTD | 1,424,321 | 1,334,963 | 1,386,750.4 | 1,378,838.8 | 1,354,800 | |
| T(/min) | 360 | 215 | 24.8 | 5.82 | 5.8 | |
| T2(/min) | 106.6 | 125.1 | 24.8 | 5.82 | 5.8 | |
| R1 | 91.9|51,414.26 | 91.9|47,759.66 | 91.9|49,741.43 | 91.9|49,396.91 | 91.9|48,523.49 | |
| R2 | 19.0|30,804.79 | 19.0|29,076.45 | 19.0|29,871.68 | 19.0|29,595.30 | 19.0|29,092.01 | |
| C1 | 94.2|43,111.60 | 94.1|41,572.86 | 94.1|43,089.45 | 94.1|42,682.27 | 94.1|41,977.06 | |
| C2 | 29.3|16,810.22 | 28.8|16,796.45 | 29.0|117,340.13 | 28.9|17,174.73 | 28.8|16,877.68 | |
| RC1 | 90.0|46,753.61 | 90.0|44,333.40 | 90.0|46,152.97 | 90.0|45,824.65 | 90.0|44,974.63 | |
| RC2 | 18.4|25,588.52 | 18.2|24,131.12 | 18.4|24,951.31 | 18.3|24,655.48 | 18.2|24,248.11 | |
| CNV | 3428 | 3420 | 3421 | 3419 | 3419 | |
| CTD | 2,144,830 | 2,036,700 | 2,111,469.7 | 2,093,293.5 | 2,056,930 | |
| T(/min) | 450 | 349 | 34.5 | 7.75 | 7.7 | |
| T2(/min) | 133.3 | 203.1 | 34.5 | 7.75 | 7.7 |
5.4. The Results of Large Scale VRPTW and MDVRPTW Problem in Shanghai, China
| Instance | Type | N | M | D | Q | STVDH | |||
|---|---|---|---|---|---|---|---|---|---|
| Savg 10 (/km) | Tavg 10 (/min) | SBest 10(/km) | TBest 10 (/min) | ||||||
| Sh1a | VRPTW | 2000 | 1 | 200 | 2000 | 59.3|3024.870 | 15.7 | 58|2996.104 | 15.9 |
| Sh2a | VRPTW | 4000 | 1 | 300 | 2000 | 119.8|4674.122 | 28.3 | 118|4598.592 | 30.6 |
| Sh3a | VRPTW | 6000 | 1 | 400 | 2000 | 171.0|6145.245 | 60.0 | 169|6052.084 | 65.9 |
| Sh4a | VRPTW | 8000 | 1 | 500 | 2000 | 220.3|7511.361 | 93.6 | 218|7372.345 | 98.9 |
| Sh5a | VRPTW | 10,000 | 1 | 600 | 2000 | 276.8|8829.127 | 120.8 | 274|8681.006 | 128.8 |
| CNV | 847.1 | 837 | |||||||
| CTD(/km) | 30,184.725 | 29,701.132 | |||||||
| Gap to Savg | −1.60% | ||||||||
| Total Time (/min) | 318.4 | 340.1 | |||||||
| Sh1b | MDVRPTW | 2000 | 2 | 200 | 2000 | 70.2|3045.601 | 16.1 | 69|2999.616 | 16.9 |
| Sh2b | MDVRPTW | 4000 | 3 | 300 | 2000 | 127.9|4265.365 | 29.8 | 126|4174.144 | 31.5 |
| Sh3b | MDVRPTW | 6000 | 4 | 400 | 2000 | 172.1|6247.152 | 62.2 | 169|5260.810 | 69.6 |
| Sh4b | MDVRPTW | 8000 | 5 | 500 | 2000 | 237.4|6849.848 | 98.4 | 235|6238.438 | 105.4 |
| Sh5b | MDVRPTW | 10,000 | 6 | 600 | 2000 | 298.8|6845.606 | 138.9 | 293|6784.751 | 139.5 |
| CNV | 906.4 | 892 | |||||||
| CTD (/km) | 26,353.572 | 26,289.418 | |||||||
| Gap to Savg | −1.73% | ||||||||
| Total Time (/min) | 345.4 | 362.9 | |||||||
| Instance | Type | N | M | STVDH | ArcGIS | VRPEJ | |||
|---|---|---|---|---|---|---|---|---|---|
| SBest 10(/km) | TBest 10 (/min) | SBest 10(/km) | TBest 10 (/min) | SBest 10(/km) | TBest 10 (/min) | ||||
| Sh1a | VRPTW | 1 | 2000 | 58|2996.104 | 15.9 | 62|3296.104 | 60.5 | 59|3285.404 | 50.8 |
| Sh2a | VRPTW | 1 | 4000 | 118|4598.592 | 30.6 | 120|4022.248 | 125.4 | 126|5234.168 | 122.2 |
| Sh3a | VRPTW | 1 | 6000 | 169|6052.084 | 65.9 | 173|6738.745 | 197.2 | 190|6948.372 | 242.7 |
| Sh4a | VRPTW | 1 | 8000 | 218|7372.345 | 98.9 | 223|8045.327 | 254.8 | 242|8438.982 | 290.8 |
| Sh5a | VRPTW | 1 | 10,000 | 274|8681.006 | 128.8 | 278|9874.135 | 407.2 | 312|9814.247 | 428.8 |
| Sh1b | MDVRPTW | 2 | 2000 | 69|2999.616 | 16.9 | 72|3308.245 | 60.5 | 74|3374.126 | 58.1 |
| Sh2b | MDVRPTW | 3 | 4000 | 126|4174.144 | 31.5 | 124|4610.283 | 125.4 | 132|4878.785 | 142.3 |
| Sh3b | MDVRPTW | 4 | 6000 | 169|5260.810 | 69.6 | 174|6645.397 | 197.2 | 180|7013.522 | 248.5 |
| Sh4b | MDVRPTW | 5 | 8000 | 235|6238.438 | 105.4 | 239|6982.136 | 254.8 | 260|6989.971 | 280.5 |
| Sh5b | MDVRPTW | 6 | 10,000 | 293|6784.751 | 139.5 | 299|7525.189 | 568.1 | 339|7881.788 | 490.6 |
| CNV | 1729 | 1764 | 1893 | ||||||
| CTD (/km) | 55,990.550 | 62,047.809 | 63,659.365 | ||||||
| Gap to STVDH | 10.82% | 13.70% | |||||||
| Total Computing Time (/min) | 703.0 | 2141.1 | 2355.3 | ||||||
6. Discussion
6.1. Impact of the Spatial-Temporal Voronoi Diagram
6.2. Spatial-Temporal Proximity Analysis on the Best Found Results
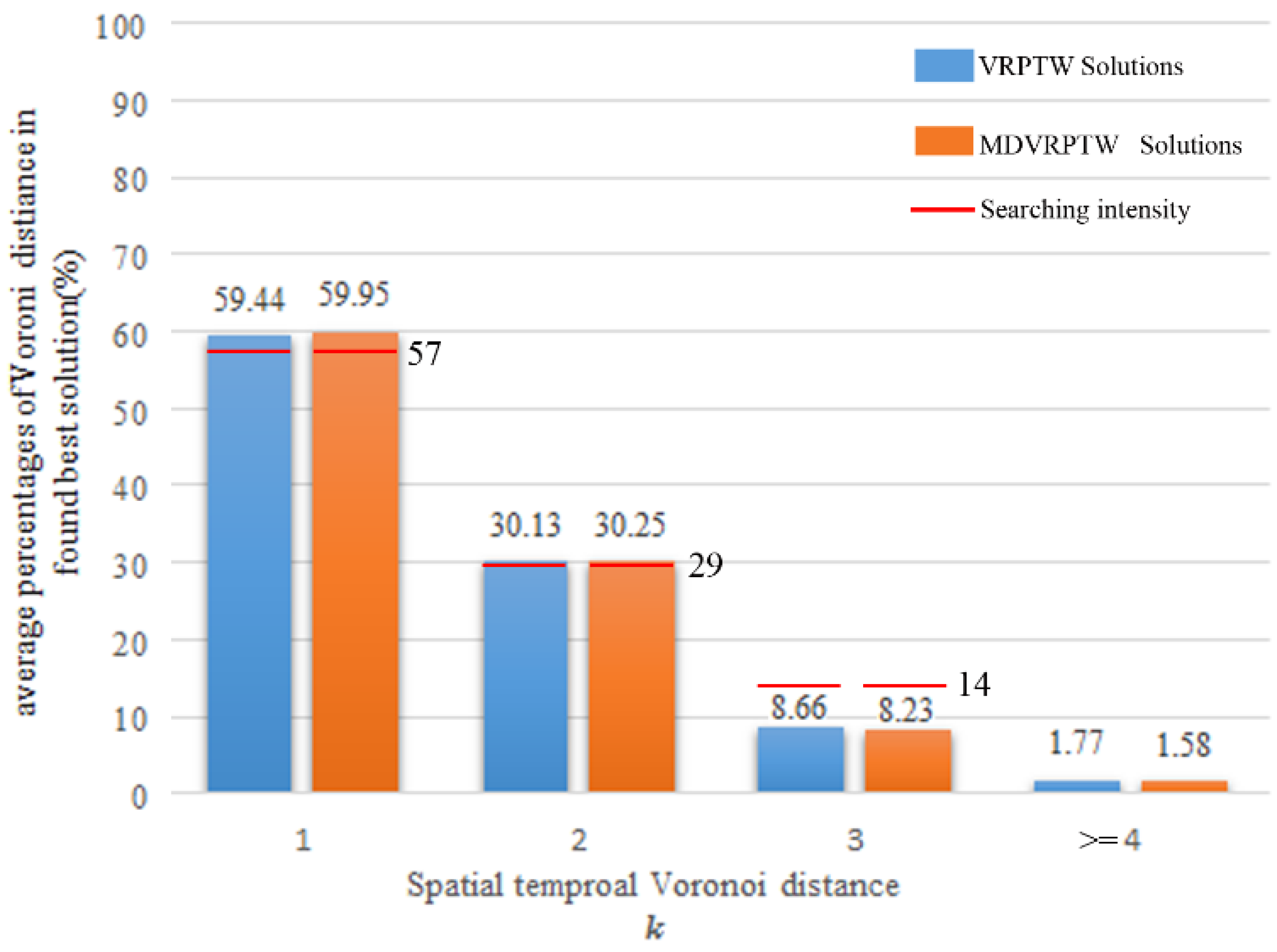
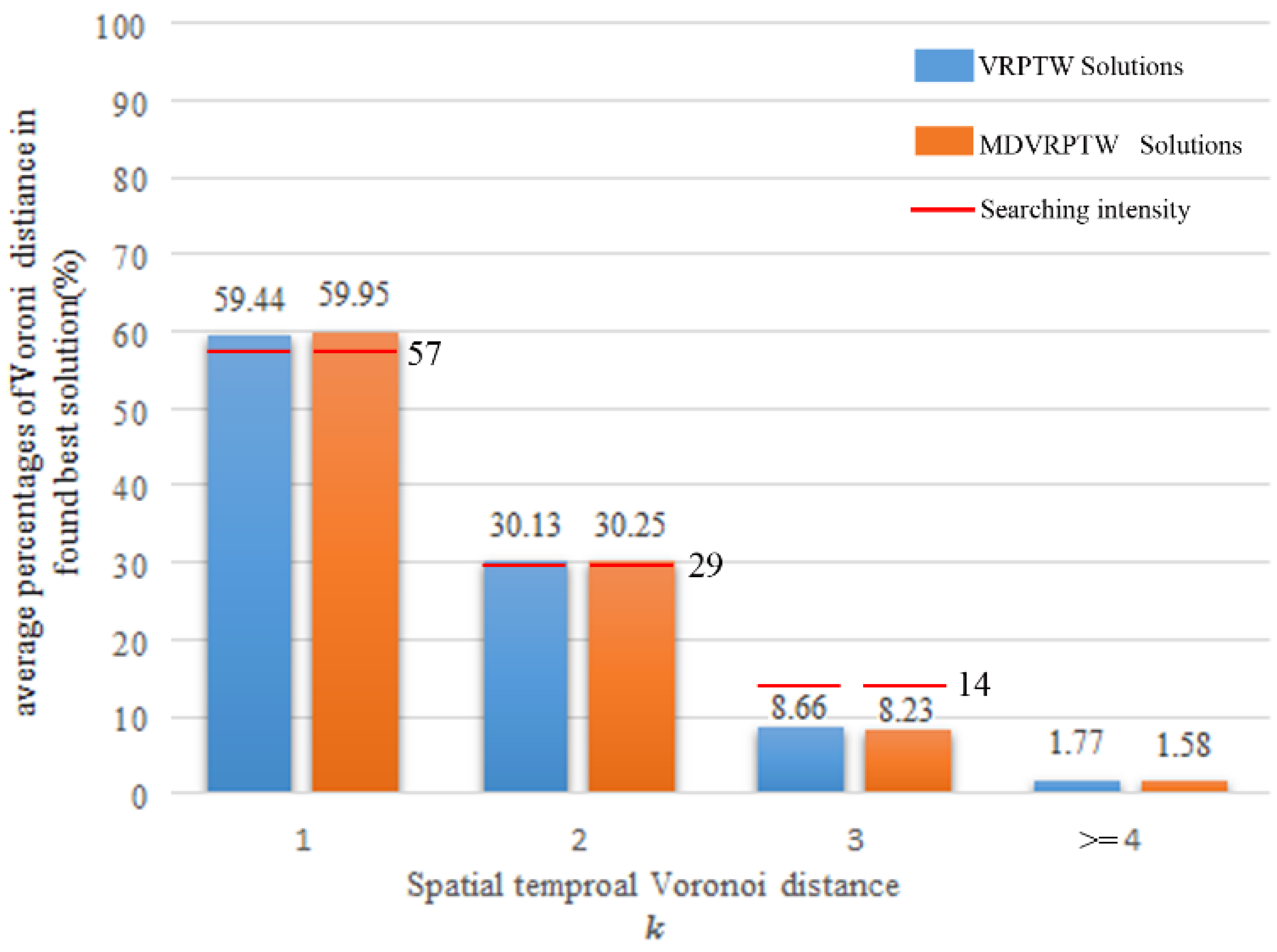
- The number of larger Voronoi distances is only a small proportion of the best found results. As Figure 11 displays, the percentages of Voronoi distances greater than three in the VRPTW and MDRPTW solutions are only 1.77% and 1.58%, respectively. Such a distribution agrees with the setting of parameter (3) in Section 5.2. Therefore, the spatial-temporal Voronoi neighborhood is very typical in the found solution.
- The percentage decreases sharply as the Voronoi distance increases. For the large-scale VRPTW dataset (Sh1a–Sh5a), the percentages for Voronoi distances 1, 2, 3, and >= 4 are 59.44%, 30.13%, 8.66%, and 1.77%, respectively, which is similar to the distribution in the MDVRPTW solution. This verifies that there is a spatial-temporal local compact structure in the routes of best found solutions. Compared with the theoretical searching intensity (as Equation (7) in Section 4.2.1 where ) in the Voronoi distance decay strategy, these percentages systematically slightly shift to small Voronoi distances. This result demonstrates the effectiveness of the Voronoi distance-decay strategy, which searches more on near neighbors in the local search but still spends necessary efforts on far neighbors.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Miller, H.J.; Shaw, S.L. Geographic Information Systems for Transportation: Principles and Applications; Oxford University Press: Oxford, UK, 2001. [Google Scholar]
- Lee, E.; Oduor, P. Using multi-attribute decision factors for a modified all-or-nothing traffic assignment. ISPRS Int. J. Geo-Inf. 2015, 4, 883–899. [Google Scholar] [CrossRef]
- Huang, Z.; Liu, X. A hierarchical approach to optimizing bus stop distribution in large and fast developing cities. ISPRS Int. J. Geo-Inf. 2014, 3, 554–564. [Google Scholar] [CrossRef]
- Schittekat, P.; Kinable, J.; Sörensen, K.; Sevaux, M.; Spieksma, F.; Springael, J. A metaheuristic for the school bus routing problem with bus stop selection. Eur. J. Oper. Res. 2013, 229, 518–528. [Google Scholar] [CrossRef]
- Mendoza, J.E.; Medaglia, A.L.; Velasco, N. An evolutionary-based decision support system for vehicle routing: The case of a public utility. Decis. Support. Syst. 2009, 46, 730–742. [Google Scholar] [CrossRef]
- Arribas, C.A.; Blazquez, C.A.; Lamas, A. Urban solid waste collection system using mathematical modelling and tools of geographic information systems. Waste. Manage. Res. 2010, 28, 355–363. [Google Scholar] [CrossRef] [PubMed]
- Weigel, D.; Cao, B. Applying GIS and OR techniques to solve sears technician-dispatching and home-delivery problems. Interfaces 1999, 29, 112–130. [Google Scholar] [CrossRef]
- Kuo, P.-F.; Lord, D.; Walden, T.D. Using geographical information systems to organize police patrol routes effectively by grouping hotspots of crash and crime data. J. Transp. Geogr. 2013, 30, 138–148. [Google Scholar] [CrossRef]
- Janssens, J.; van den Bergh, J.; Sörensen, K.; Cattrysse, D. Multi-objective microzone-based vehicle routing for courier companies: From tactical to operational planning. Eur. J. Oper. Res. 2015, 242, 222–231. [Google Scholar] [CrossRef]
- Thill, J.C. Geographic information systems for transportation in perspective. Transp. Res. C-Emer. 2000, 8, 3–12. [Google Scholar] [CrossRef]
- Antikainen, H. Using the hierarchical pathfinding A* algorithm in GIS to find paths through rasters with nonuniform traversal cost. ISPRS. Int. J. Geo.-Inf. 2013, 2, 996–1014. [Google Scholar] [CrossRef]
- Vanhove, S.; Fack, V. An effective heuristic for computing many shortest path alternatives in road networks. Int. J. Geogr. Inf. Sci. 2012, 23, 1031–1050. [Google Scholar] [CrossRef]
- Li, R.; Leung, Y.; Huang, B.; Lin, H. A genetic algorithm for multiobjective dangerous goods route planning. Int. J. Geogr. Inf. Sci. 2012, 27, 1073–1089. [Google Scholar] [CrossRef]
- Curtin, K.M.; Voicu, G.; Rice, M.T.; Stefanidis, A. A comparative analysis of traveling salesman solutions from geographic information systems. Trans. GIS. 2014, 18, 286–301. [Google Scholar] [CrossRef]
- Solomon, M.M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Bräysy, O.; Gendreau, M. Vehicle routing problem with time windows, part I: Route construction and local search algorithms. Transp. Sci. 2005, 39, 104–118. [Google Scholar] [CrossRef]
- Braysy, O.; Gendreau, M. Vehicle routing problem with time windows, part II: Metaheuristics. Transp. Sci. 2005, 39, 119–139. [Google Scholar] [CrossRef]
- Qi, M.; Lin, W.-H.; Li, N.; Miao, L. A spatiotemporal partitioning approach for large-scale vehicle routing problems with time windows. Transp. Res. E-Log. 2012, 48, 248–257. [Google Scholar] [CrossRef]
- Ray, J.J. A web-based spatial decision support system optimizes routes for oversize/overweight vehicles in delaware. Decis. Support. Syst. 2007, 43, 1171–1185. [Google Scholar] [CrossRef]
- Huang, B.; Cheu, R.L.; Liew, Y.S. GIS and genetic algorithms for hazmat route planning with security considerations. Int. J. Geogr. Inf. Sci. 2004, 18, 769–787. [Google Scholar] [CrossRef]
- Huang, B.; Fery, P.; Xue, L.; Wang, Y. Seeking the pareto front for multiobjective spatial optimization problems. Int. J. Geogr. Inf. Sci. 2008, 22, 507–526. [Google Scholar] [CrossRef]
- Wright, D.J.; Wang, S. The emergence of spatial cyberinfrastructure. P. Natl. Acad. Sci. 2011, 108, 5488–5491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tong, D.; Murray, A.T. Spatial optimization in geography. Ann. Amer. Geogr. 2012, 102, 1290–1309. [Google Scholar] [CrossRef]
- Li, X.; He, J.; Liu, X. Ant intelligence for solving optimal path-covering problems with multi-objectives. Int. J. Geogr. Inf. Sci. 2009, 23, 839–857. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The granular tabu search and its application to the vehicle-routing problem. Inf. J. Comput. 2003, 15, 333–346. [Google Scholar] [CrossRef]
- Li, F.; Golden, B.; Wasil, E. Very large-scale vehicle routing: New test problems, algorithms, and results. Comput. Oper. Res. 2005, 32, 1165–1179. [Google Scholar] [CrossRef]
- Fang, Z.; Tu, W.; Li, Q.; Shaw, S.-L.; Chen, S.; Chen, B.Y. A Voronoi neighborhood-based search heuristic for distance/capacity constrained very large vehicle routing problems. Int. J. Geogr. Inf. Sci. 2013, 27, 741–764. [Google Scholar] [CrossRef]
- Tu, W.; Fang, Z.; Li, Q. The empirical Voronoi veighborhood analysis of heuristic solutions for vehicle routing problems. In Proceedings of 2013 International Symposium on Recent Advances in Transport Modelling, Goldcoast, Australia, 21–23 April 2013.
- Okabe, A.; Boots, B.; Sugihara, K.; Chiu, S.N. Spatial Tessellations: Concepts and Applications of Voronoi Diagrams; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Chen, J.; Zhao, R.; Li, Z. Voronoi-based k-order neighbour relations for spatial analysis. ISPRS. J. Photogram. Remote Sens. 2004, 59, 60–72. [Google Scholar] [CrossRef]
- Zhao, R.; Chen, J.; Li, Z. K-order spatial neighbours based on Voronoi diagram: Description, computation and applications. Int. Arc. Photogram. Remote Sens. Spat. Inf. Sci. 2002, 34, 10–15. [Google Scholar]
- Tu, W.; Li, Q.; Fang, Z. Large scale multi-depot logistics routing optimization based on network Voronoi diagram. Acta Geod. et Cartogr. Sin. 2014, 43, 1075–1082. [Google Scholar]
- Laporte, G. Fifty years of vehicle routing. Transp. Sci. 2009, 43, 408–416. [Google Scholar] [CrossRef]
- Baños, R.; Ortega, J.; Gil, C.; Fernández, A.; de Toro, F. A simulated annealing-based parallel multi-objective approach to vehicle routing problems with time windows. Expert. Syst. Appl. 2013, 40, 1696–1707. [Google Scholar] [CrossRef]
- Alabas-Uslu, C.; Dengiz, B. A self-adaptive local search algorithm for the classical vehicle routing problem. Expert. Syst. Appl. 2011, 38, 8990–8998. [Google Scholar] [CrossRef]
- Ropke, S.; Pisinger, D. An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transp. Sci. 2006, 40, 455–472. [Google Scholar] [CrossRef]
- Polacek, M.; Benkner, S.; Doerner, K.F.; Hartl, R.F. A cooperative and adaptive variable neighborhood search for the multi depot vehicle routing problem with time windows. BuR-Business Res. 2008, 1, 207–218. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Laporte, G.; Mercier, A. A unified tabu search heuristic for vehicle routing problems with time windows. J. Oper. Res. Soc. 2001, 52, 928–936. [Google Scholar] [CrossRef]
- Repoussis, P.P.; Tarantilis, C.D.; Ioannou, G. Arc-guided evolutionary algorithm for the vehicle routing problem with time windows. IEEE. Trans. Evol. Comput. 2009, 13, 624–647. [Google Scholar] [CrossRef]
- Vidal, T.; Crainic, T.G.; Gendreau, M.; Prins, C. A hybrid genetic algorithm with adaptive diversity management for a large class of vehicle routing problems with time-windows. Comput. Oper. Res. 2012, 40, 475–489. [Google Scholar] [CrossRef]
- Mester, D.; Bräysy, O. Active guided evolution strategies for large-scale vehicle routing problems with time windows. Comput. Oper. Res. 2005, 32, 1593–1614. [Google Scholar] [CrossRef]
- Gehring, H.; Homberger, J. Parallelization of a two-phase metaheuristic for routing problems with time windows. J. Heuristics. 2002, 8, 251–276. [Google Scholar] [CrossRef]
- Ibaraki, T.; Imahori, S.; Kubo, M.; Masuda, T.; Uno, T.; Yagiura, M. Effective local search algorithms for routing and scheduling problems with general time-window constraints. Transp. Sci. 2005, 39, 206–232. [Google Scholar] [CrossRef]
- Nagata, Y.; Bräysy, O.; Dullaert, W. A penalty-based edge assembly memetic algorithm for the vehicle routing problem with time windows. Comput. Oper. Res. 2010, 37, 724–737. [Google Scholar] [CrossRef]
- Dondo, R.; Cerdá, J. A cluster-based optimization approach for the multi-depot heterogeneous fleet vehicle routing problem with time windows. Eur. J. Oper. Res. 2007, 176, 1478–1507. [Google Scholar] [CrossRef]
- Milthers, N.P.M. Solving VRP Using Voronoi Diagrams and Adaptive Large Neighborhood Search. Master’s thesis, University of Copenhagen, Copenhagen, Denmark, 2009. [Google Scholar]
- Santos, L.; Coutinho-Rodrigues, J.; Antunes, C.H. A web spatial decision support system for vehicle routing using google maps. Deci. Support. Syst. 2011, 51, 1–9. [Google Scholar] [CrossRef]
- Tu, W.; Li, Q.; Chang, X.; Yue, Y.; Zhu, J. A Spatio-temporal decision support framework for large scale logistics distribution in Metropolitan area. In Advances in Spatial Data Handling and Anslysis; Harvey, F., Leung, Y., Eds.; Springer: Berlin, Germany, 2015; pp. 193–206. [Google Scholar]
- Tu, W.; Fang, Z.; Li, Q.; Shaw, S.-L.; Chen, B.Y. A bi-level Voronoi diagram based heuristics for large scale mutli-depot vehicle routing problem with time window. Transp. Res. E-Log 2014, 61, 84–97. [Google Scholar] [CrossRef]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H.T. The quickhull algorithm for convex hulls. ACM. T. Math. Softw. 1996, 22, 469–483. [Google Scholar] [CrossRef]
- Zachariadis, E.E.; Kiranoudis, C.T. A strategy for reducing the computational complexity of local search-based methods for the vehicle routing problem. Comput. Oper. Res. 2010, 37, 2089–2105. [Google Scholar] [CrossRef]
- Dongarra, J. Performance of Various Computers Using Standard Linear Equations Software. Available online: http://www.netlib.org/benchmark/performance.ps (accessed on 30 August 2015).
- Gehring, H.; Homberger, J. A parallel hybrid evolutionary metaheuristic for the vehicle routing problem with time windows. In Proceedings of the EUROGEN99, Jyväskylä, Finland, 30 May–3 June 1999; pp. 57–64.
- The VRPTW Benchmarks of GEHRING and HOMBERGER. Available Online: http://www.bernabe.dorronsoro.es/vrp/ (accessed on 10 October 2015).
- The Large-Scale VRPTW and MDVRPTW Problem Dataset in Shanghai, China. Available Online: https://github.com/spatialsmart/VRPTW/tree/master/Shanghai/Problem (accessed on 10 October 2015).
- Coy, S.; Golden, B.; Runger, G.; Wasil, E. Using experimental design to find effective parameter settings for heuristics. J. Heuristics. 2001, 7, 77–97. [Google Scholar] [CrossRef]
- Groër, C.; Golden, B.; Wasil, E. A library of local search heuristics for the vehicle routing problem. Math. Program. Comput. 2011, 2, 79–101. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, W.; Li, Q.; Fang, Z.; Zhou, B. A Novel Spatial-Temporal Voronoi Diagram-Based Heuristic Approach for Large-Scale Vehicle Routing Optimization with Time Constraints. ISPRS Int. J. Geo-Inf. 2015, 4, 2019-2044. https://doi.org/10.3390/ijgi4042019
Tu W, Li Q, Fang Z, Zhou B. A Novel Spatial-Temporal Voronoi Diagram-Based Heuristic Approach for Large-Scale Vehicle Routing Optimization with Time Constraints. ISPRS International Journal of Geo-Information. 2015; 4(4):2019-2044. https://doi.org/10.3390/ijgi4042019
Chicago/Turabian StyleTu, Wei, Qingquan Li, Zhixiang Fang, and Baoding Zhou. 2015. "A Novel Spatial-Temporal Voronoi Diagram-Based Heuristic Approach for Large-Scale Vehicle Routing Optimization with Time Constraints" ISPRS International Journal of Geo-Information 4, no. 4: 2019-2044. https://doi.org/10.3390/ijgi4042019
APA StyleTu, W., Li, Q., Fang, Z., & Zhou, B. (2015). A Novel Spatial-Temporal Voronoi Diagram-Based Heuristic Approach for Large-Scale Vehicle Routing Optimization with Time Constraints. ISPRS International Journal of Geo-Information, 4(4), 2019-2044. https://doi.org/10.3390/ijgi4042019