1. Introduction
Road infrastructure is vital for economic growth, facilitating passenger and freight transportation, while influencing safety, comfort, and costs. Effective maintenance and management enhance accessibility, mobility, and community development, necessitating integrated treatment plans for optimal road network performance [
1]. Furthermore, the impact of road maintenance extends beyond immediate community benefits; it also aligns with broader sustainability goals outlined in the United Nations Sustainable Development Goals (SDGs) [
2]. For instance, maintaining reliable infrastructure supports economic growth (SDG 8), contributes to building resilient infrastructure (SDG 9), promotes sustainable cities and communities (SDG 11), and well-maintained roads facilitate access to essential services such as healthcare, education, and employment opportunities, which are vital for improving the quality of life and reducing poverty levels. In contrast, poorly maintained roads can lead to increased travel costs, hinder service delivery, and elevate the risk of accidents, ultimately affecting community well-being and economic stability.
Data-driven road maintenance leverages Geographic Information System (GIS) technology to revolutionize road management and maintenance processes by integrating spatial data with operational planning. GIS serves as a powerful framework for road network management, offering systematic documentation and efficient data handling. By incorporating spatial and topological relationships among geo-referenced entities, GIS enhances the accuracy of road geometry, intersections, and associated attributes. With its advanced capabilities—such as thematic mapping, statistical analysis, decision support, network modeling, multi-database access—GIS enhances highway management and infrastructure development. Moreover, GIS provides intuitive visualization through spatially oriented maps, surpassing traditional tables and graphs in data interpretation. By displaying patterns and relationships in a geographic context, GIS enables users to analyze problems in relation to both space and time, improving situational awareness and supporting more effective decision-making [
3]. Together, these GIS capabilities empower the development of digital road network models and optimize road infrastructure management through data-driven approaches. So, GIS technology supports a wide range of applications, including road maintenance [
4], human mobility [
5], transport planning [
6], and emergency response [
7].
In road maintenance projects, GIS serves as a flexible tool for managing road asset data through storage, retrieval, and analysis. A notable example is the GIS-based Intersection Inventory System (GIS-IIS) developed by the Illinois Department of Transportation. This system efficiently integrates diverse data sources, such as traffic signal details and multimedia resources, to create a detailed inventory of signalized intersections, demonstrating the powerful role that GIS can play in managing infrastructure data [
8]. Moreover, there is an established research focus on using GIS for visualizing and integrating project data to address planning challenges in highway agencies. Key directions include supporting integrated planning, and leveraging geospatial visualization for developing spatial decision support systems [
9,
10,
11,
12]. Formalizing the prioritization process with GIS and decision analysis techniques is essential for sustainable transit infrastructure development. Some studies (e.g., [
3,
4,
10,
11]) have proposed GIS-based models for highway maintenance prioritization, incorporating pavement condition and other relevant factors. These models utilize GIS for visualizing data, managing information, and automating maintenance planning, improving overall efficiency and effectiveness. One of the main tasks in GIS, particularly for infrastructure projects (e.g., road maintenance management) and urban planning, is digitization. This process involves converting geographic features into digital formats for visualization, storage of related information, and analysis. It allows for the creation of vector data that represents real-world entities, such as roads, buildings, and boundaries, forming the foundation for numerous geospatial applications [
13].
The manual digitization is a time-intensive process that requires significant human effort and resources. It often involves multiple users working on tasks such as tracing features, verifying data, and ensuring accuracy, which increases operational costs. Additionally, the reliance on manual effort can lead to inconsistencies and errors due to subjective interpretations. These limitations make automated digitization, particularly with advanced techniques like deep learning, an attractive alternative for reducing reliance on extensive manual work [
14,
15]. Recent advancements in automated techniques have significantly reduced the time and cost associated with this process, making it a highly efficient alternative to the traditionally costly and labor-intensive manual approach [
14,
15,
16].
Automatic digitization using multi-source data and deep learning has become a prominent focus for segmenting roads, buildings, and trees, supporting applications such as urban planning, disaster response, and environmental monitoring [
17,
18,
19]. Despite these advancements, the accuracy of digitization, particularly for intersections extraction, remains a critical limitation. Errors in segment extraction can propagate through workflows, impacting tasks such as quantity estimation and spatial analysis. Intersections, which often require precise geometry for reliable measurements, are especially challenging due to overlapping features, complex geometries, and varying data quality. Addressing these issues is vital to enhance the reliability of automated digitization systems and ensure their applicability across diverse domains.
To the best of our knowledge, existing research has investigated the detection of the positions of road intersections using either raster images or GPS trajectories [
20]. For example, Chiang et al. [
21,
22] employed raster maps from various sources to detect road intersections, which served as the foundation for automatic road digitization. Considering that road maps are among the most commonly used map types and road layers are widely available across various geospatial data sources, the road network can be leveraged to integrate maps with other geospatial data. In [
23], road footprint classification methods were applied to automatically extract road networks and to identify intersections from aerial images. With advancements in the Internet of Things (IoT) and Information and Communication Technologies (ICT), the availability of large-scale vehicle trajectory data has significantly increased, offering valuable opportunities for big-geospatial data analysis. This rich dataset can be utilized to detect road intersection points by analyzing characteristics within intersection areas, such as the clustering of turning points [
24,
25,
26]. Zhang et al. [
26] developed a deep learning algorithm based on YOLOv5 architecture for detecting road intersections using crowd-sourced data from vehicle trajectories. The approach successfully identifies the locations of road intersections with different shapes, but it does not map the shape of the intersections as a vector layer. The advancement of computing capabilities and the ability to process multi-source data has made the integration of diverse datasets a prominent research focus. Fusing multi-source data, such as OpenStreetMap (OSM) data, satellite imagery, aerial imagery, and GPS trajectories, serves as a catalyst for improving the accuracy of detecting road intersection points [
15,
17,
27].
To contextualize the proposed methodology, we classify and compare existing road intersection detection approaches. These approaches can be broadly categorized as either geometry-based [
22,
23,
24,
25,
28,
29,
30,
31,
32] or deep learning-based [
15,
26,
27,
33,
34,
35,
36]. However, as illustrated in
Table 1, prior studies have primarily focused on identifying intersection positions, with significantly less attention given to their detailed spatial mapping.
While prior research has extensively addressed intersection detection in GIS, a critical gap remains in precisely mapping intersection geometries, including boundary delineation, topology, and compliance with road management standards. The proposed work bridges this gap by advancing beyond mere positional detection of road intersections to delineate geometric structures of the intersection (i.e., digitizing intersections) with high fidelity, adhering to road management and maintenance standards. This approach simultaneously resolves topological inconsistencies (e.g., overlaps and gaps) inherent in manual digitization processes. These digitized intersection maps are crucial for documenting road condition analysis after road surveys, calculating quantities and costs relevant to the road management and maintenance processes, and prioritizing the most necessary roads that require maintenance. In this work, the challenges of mapping road intersections are addressed by incorporating geometry computation principles based on land surveying, providing an efficient solution that reduces time and costs. By leveraging azimuth calculations and geometric methods, this approach enhances the extraction of intersections and other complex features, minimizing errors from overlapping elements, intricate geometries, and inconsistent data quality. It not only improves the reliability of automated digitization systems but also broadens their applicability across diverse domains by significantly reducing manual effort.
2. Methodology
This section outlines the methodology employed for automating the digitization of road intersections and assigning corresponding unique identifiers (IDs). It leverages computational geometry, spatial data integration to ensure precise mapping, achieve accurate results, and minimize manual intervention. The methodology consists of multiple structured main phases, as shown in
Figure 1, to facilitate the accurate extraction and representation of intersections.
The methodology begins with preparing the spatial layer by loading and preprocessing datasets to ensure topological consistency. The input layers include the main street network and regional polygons, which represent the enclosed areas formed by intersecting main streets. Next, the azimuth computation phase determines the directional alignment of road segments, which helps in detecting key transitions (Corners and road fillets). The corner and fillet detection phases identify sharp corners and curved transitions. Buffers are then generated around corners and Points of Intersection (PIs) of fillets to define intersection influence areas. Then, tangents are generated along the dissolved buffer edges to enclose and define the intersection boundaries in the transverse directions of the intersecting roads. A convex hull is created to encapsulate key transition points, followed by a geometry difference computation to isolate precise road intersections. Finally, unique IDs are assigned to the extracted intersections for systematic integration into the spatial database. These structured phases automate the digitization of road intersections, and the following sections provide definitions of some acronyms used, along with a detailed explanation of each phase and the substeps involved in achieving the objectives of this study.
2.1. Definitions
Before delving into the detailed explanation of the methodology, this subsection provides definitions of key terms used to describe the processes involved in road intersection digitization:
Region: A polygonal area formed between the intersecting main streets, representing the enclosed space surrounded by road segments. Each region is assigned a unique identifier called REGION_NO.
Azimuth: An angle measured clockwise from the north to a line (e.g., a road segment or a segment of a region boundary represented as a polyline), defining its orientation.
Key Transition: A Critical geometric features where road direction or curvature changes, such as corners or fillets.
Corner: A Sharp angle points where two successive segments meet, serving as a type of key transition that forms the intersection.
Fillet: A rounded transitions between intersecting roads, often designed using a specific radius to facilitate smoother vehicle turns and reduce sharp cornering.
Tangents of Fillets: Straight lines extend from both ends of a fillet (a smooth connecting curve), defining its direction and ensuring a smooth transition between adjacent segments.
Point of Intersection (PI): The theoretical intersection points of the tangents of fillets if extended.
Point of Curvature (PC): The point where the curve begins (transition from tangent to curve).
Point of Tangency (PT): The point where the curve ends and returns to a tangent.
Dissolved Buffers: A single merged buffer encompassing multiple overlapping buffers around intersecting roads.
Convex Hull: The smallest enclosing shape that contains all key transition points of an intersection.
GeoDataFrame: A spatially-enabled tabular data structure that extends the capabilities of a traditional DataFrame by incorporating geospatial data.
2.2. Proposed Digitization Approach
In this work, a Python script is deployed, utilizing several libraries for geospatial data processing and analysis. facilitates spatial data handling, while supports geometric operations, including , , and , along with geometry types such as , , and . from aids in geometry conversion. and provide numerical and trigonometric computations, while manages attribute data. enables interactive map visualization, and and handle system interactions. These specialized libraries ensure efficient spatial analysis, seamless data processing, and interactive visualization, enhancing the accuracy and usability of geospatial datasets.
The following subsections provide a detailed explanation of the substeps in the following subsections, as presented in
Figure 2, within the main phases presented in
Figure 1.
2.2.1. Preparing the Spatial Layer
The preparation of the spatial layer involves loading and preprocessing the dataset to ensure topological consistency and spatial accuracy. A crucial step in this process is verifying the Coordinate Reference System (CRS) of the dataset, ensuring it is EPSG:32637, which corresponds to UTM Zone 37 North based on the WGS 84 datum. This CRS ensures precise spatial representation, maintaining accurate distance and area measurements. Then, data cleaning and error correction are performed to remove duplicate or overlapping geometries while fixing topological issues such as gaps and self-intersections. Following this, attribute standardization is carried out, ensuring fields are properly labeled, redundant attributes are removed, and the dataset is optimized for performance. Finally, topology validation is conducted to check connectivity within the street network, ensuring that intersections are correctly snapped and region polygons are fully enclosed. These preparatory steps collectively enhance the accuracy, consistency, and usability of the spatial data, supporting reliable analyses in road network management.
2.2.2. Azimuth Computation
After the data preparation step, one of the most pivotal phases of this work begins. Azimuth computation is fundamental in plane surveying, involving the determination of a line’s directional angle relative to the north direction (0°), measured clockwise from 0° to 360°. This method is widely used in surveying, navigation, and road network analysis. Algorithm A1 was implemented to calculate the azimuth for the segments forming the region’s boundaries, which also define the adjacent roads.
2.2.3. Detection of Fillets in Region Boundaries
Fillets are a key transition feature, as defined in
Section 2.1, representing a rounded connection between intersecting roads. Commonly, curved or rounded transitions, when digitized manually, are represented either as a direct curve formed by three points or as multiple smaller segments approximating a smooth transition. To detect these curves, Algorithm A3 is applied based on the following two main steps.
This step is based on analyzing the local curvature of polygon boundaries using the circumradius of triangles formed by consecutive triplets of points. For each three consecutive points
, the Euclidean distances between them are computed as
,
, and
. The semi-perimeter is then calculated as follows:
followed by the computation of the triangle’s area using Heron’s formula, expressed as follows:
If the area is nonzero, the circumradius is computed using the following formula:
As shown in Algorithm A3, the process of detecting curves in a polyline of region boundary involves iterating through consecutive points and analyzing their geometric properties. For each segment, the circumradius is computed to assess curvature, along with segment lengths to ensure they meet predefined criteria. Multi-part geometries are handled separately by processing each sub-geometry individually. Curved segments that satisfy the curvature and length thresholds are identified and stored as distinct geometric features, while maintaining their associated . The adjacent curve segments within each region are merged to form continuous geometries while preserving their total length. The features are then sorted in counter-clockwise order on the basis of their spatial relationship to the region’s centroid. Finally, unique identifiers of detected fillets are assigned according to the sorted order, ensuring a structured and meaningful labeling system for further spatial analysis.
This process starts by computing a unit perpendicular vector for each line segment of fillets, ensuring the buffer expands symmetrically in both directions. Using this vector, a flat directional buffer is generated by shifting points along the perpendicular direction, forming a polygon around the original fillet. Then, the buffered features are analyzed for intersections with a street network, identifying those that overlap multiple streets. Only buffers intersecting more than one distinct street are retained, while others are removed to ensure the dataset captures meaningful connections between fillets and multiple streets. The intersecting street numbers are extracted and stored as attributes for each fillet feature.
To generate point features and fillet tangents from the given geometries, the process begins by grouping the data based on a specific region attribute. The segments within each region are then sorted in a clockwise order around the region’s centroid. For each segment, key points are extracted, including the start (PCs) and end points (PTs), as well as the centroid, which is projected onto the segment’s geometry. Descriptive labels are assigned to these points based on their sequence within the region. Each point is further associated with a unique identifier and a region reference. Finally, all extracted point features are compiled into a new GeoDataFrame while preserving the original coordinate reference system, as detailed in Algorithm A4.
2.2.4. Corners Detection
A corner represents a key transition in a region’s boundary, which can be modeled and detected when there is a significant change in azimuth or a notable deviation in the internal angle between two consecutive segments. This can be achieved by applying Algorithm A5. The internal angle between two consecutive segments is computed based on their azimuth values using the following equation:
where
and
are the azimuths of two consecutive segments, the result is constrained within
to
using the modulo operation.
The detected corners are classified into convex or concave corners based on the following criteria:
Furthermore, each detected corner is buffered by 50 m, and the number of intersecting streets is counted; corners intersecting only a single street are discarded to ensure that only significant corners are retained at true street intersections.
2.2.5. Buffer Generation and Tangent Origin Extraction
As part of automatic road intersection digitization, buffers are generated around key transition points, including road corners and Points of Intersection (PIs) of curves. In this step, a buffer with a radius of 50 m is generated around each key transition point to ensure adequate spatial coverage based on predefined criteria. This buffer size aligns with required intersection criteria used in road management and maintenance.
To maintain spatial consistency, overlapping buffers belonging to the same intersection are merged. This prevents fragmentation and ensures intersections are represented as unified spatial entities. The merging process involves identifying overlapping buffers with common intersecting streets and dissolving them into a single feature, preserving connectivity and structural integrity, as detailed in Algorithm A6.
2.2.6. Tangent Generation and Filtering
After extracting the origin points of the tangents at the intersection of the buffers with the road boundaries (which constitute the region edges), Algorithm A7 generates and filters the tangents. This process yields lateral boundaries that intersect orthogonally with the road’s longitudinal axis, thereby defining the intersection perimeter. The algorithm ensures geometric validity by retaining only those tangents that maintain approximate perpendicularity (≈90°) relative to the intersecting streets, while automatically discarding non-essential segments. When multiple tangent candidates exist, the selection process prioritizes the option exhibiting the closest alignment to true perpendicularity.
2.2.7. Convex Hull Application and Road Intersection Extraction
Our intersection extraction methodology implements Algorithm A8 through a sequential computational process. Initial convex hull construction around dissolved buffers incorporates multiple geometric primitives—specifically tangents, derived intersection points between filtered tangents and region boundaries, corners, and fillets. Subsequent geometric differencing between these convex hulls and the region Layer yields precise road intersection delineations. This approach ensures topologically robust representations by systematically resolving common manual digitization artifacts, including polygon overlaps and sliver gaps that plague manual processing methods.
Figure 3 visually demonstrates this improvement through comparison, where the orange-outlined polygon reveals how conventional approaches introduce topological imperfections at intersections, while our method preserves geometric integrity through rigorous computational treatment.
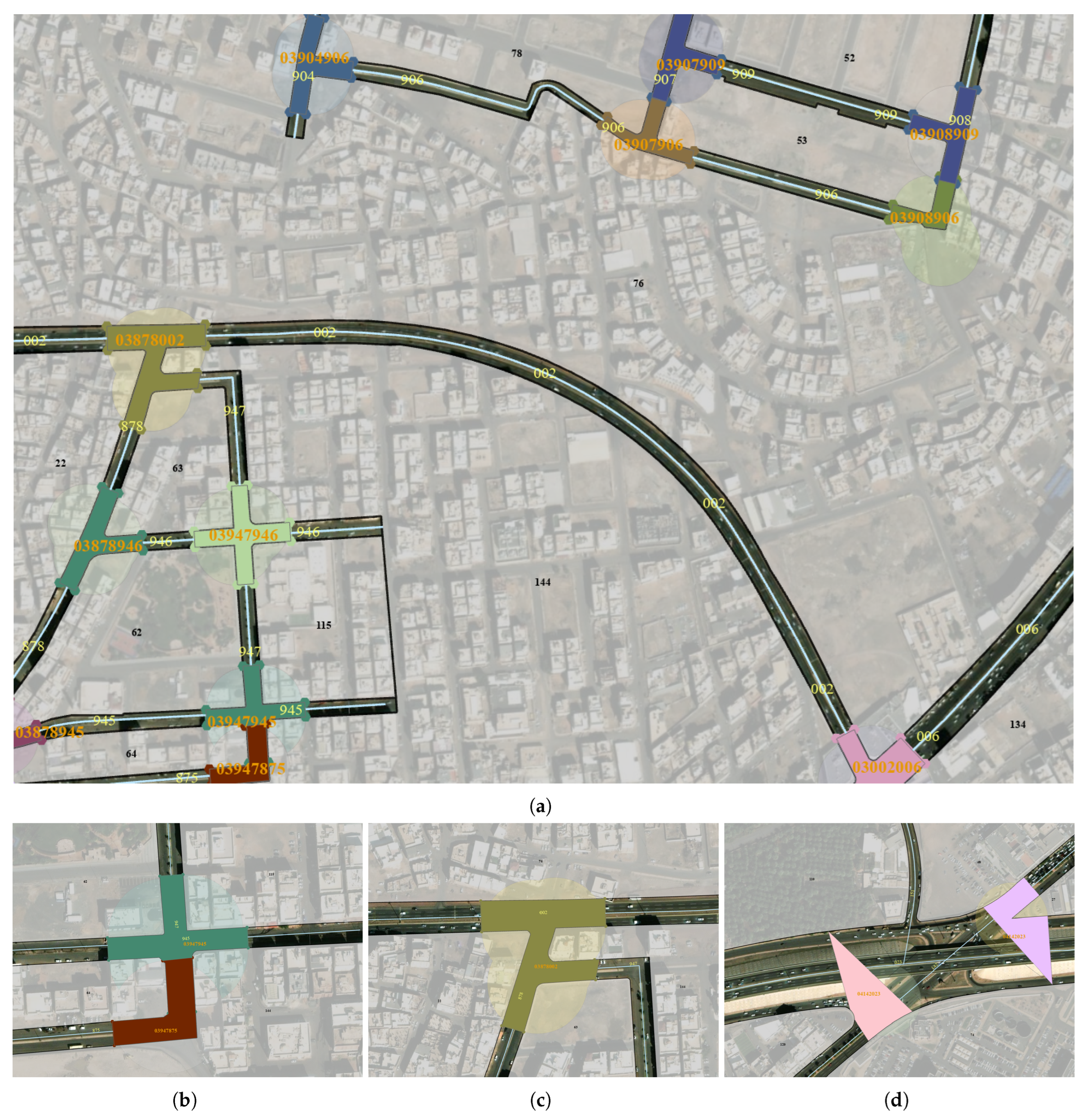
2.2.8. Assign Unique ID for Generated Roads’ Intersections
Intersections within a road network are systematically identified and assigned unique identifiers based on intersecting streets and their orientation. Each intersection is analyzed by extracting intersecting streets, determining the containing municipality, and computing aspect ratios to classify streets as North-South (NS) or East-West (EW). The primary NS and EW streets are identified based on maximum and minimum aspect ratios, respectively. Finally, a unique ID for road intersection is generated by concatenating the municipality ID (i.e., ) with the IDs (i.e., ) of the selected NS and EW streets. Detailed steps are shown in Algorithm A2.
4. Conclusions
Well-maintained roads are essential for economic growth, urban resilience, and sustainable development, ensuring businesses operate efficiently and communities have reliable access to essential services. Effective infrastructure management enhances transportation networks, reduces traffic congestion, and improves road safety. As high-traffic areas, intersections require frequent maintenance and strategic planning to enhance traffic flow, improve safety, and allocate resources efficiently. Proper documentation plays a crucial role in prioritizing repairs, optimizing infrastructure investments, and supporting urban planning by integrating public transport and future developments. A key aspect of documentation is the spatial layer, which serves as a storage system for essential information and attributes. To enhance accuracy and efficiency, this study proposes a framework for automatic digitization of road intersections using GIS and computational geometry techniques, incorporating azimuth and curve detection.
While prior research has focused primarily on intersection detection, our approach advances beyond conventional methods by both delineating and mapping road intersection boundaries while preventing topological errors (e.g., overlaps and gaps) that typically occur during manual digitization processes. This automated approach delivers faster results while reducing human error and improving efficiency. Unlike manual digitization—which is slow, inconsistent, and subjective—the system standardizes workflows to produce reliable data, ensuring consistency and accuracy across different geographic locations. Additionally, assigning unique identifiers to digitized road intersections based on predefined criteria enables systematic organization and easy retrieval of intersection data, which is essential for infrastructure planning and decision-making. By eliminating the risk of duplicate identifiers—an issue commonly detected during quality control—the proposed approach enhances data integrity and consistency and ensures the creation of unique and accurate identifiers, in contrast to manual data entry, which is prone to such errors.
Across all three case studies, the method demonstrated consistent performance in intersection detection, achieving mean IoU scores of 0.85–0.88 and F-scores of 0.91–0.93. High correctness (0.90–0.94) and completeness (0.93–0.94) scores confirm its robustness in minimizing false positives while capturing true intersections. Notably, this performance was maintained despite using heterogeneous input data—including manually digitized street layers and OSM data across different cities—highlighting the method’s adaptability to varying data quality and urban contexts. These results validate the approach’s reliability for both simple intersections and complex roadway designs in real-world application
In conclusion, this study presents an innovative and efficient solution for automated road intersection mapping, addressing the limitations of traditional manual digitization methods. The GIS-driven approach enhances accuracy, reduces processing time, and demonstrates notable improvements in productivity for organizations involved in highway maintenance and management. By implementing this system, transportation agencies can significantly improve road safety, support better decision-making for road infrastructure management, and achieve long-term cost savings in infrastructure maintenance.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}