
Road Intersection Recognition via Combining Classification Model and Clustering Algorithm Based on GPS Data


Abstract
:1. Introduction
- (1)
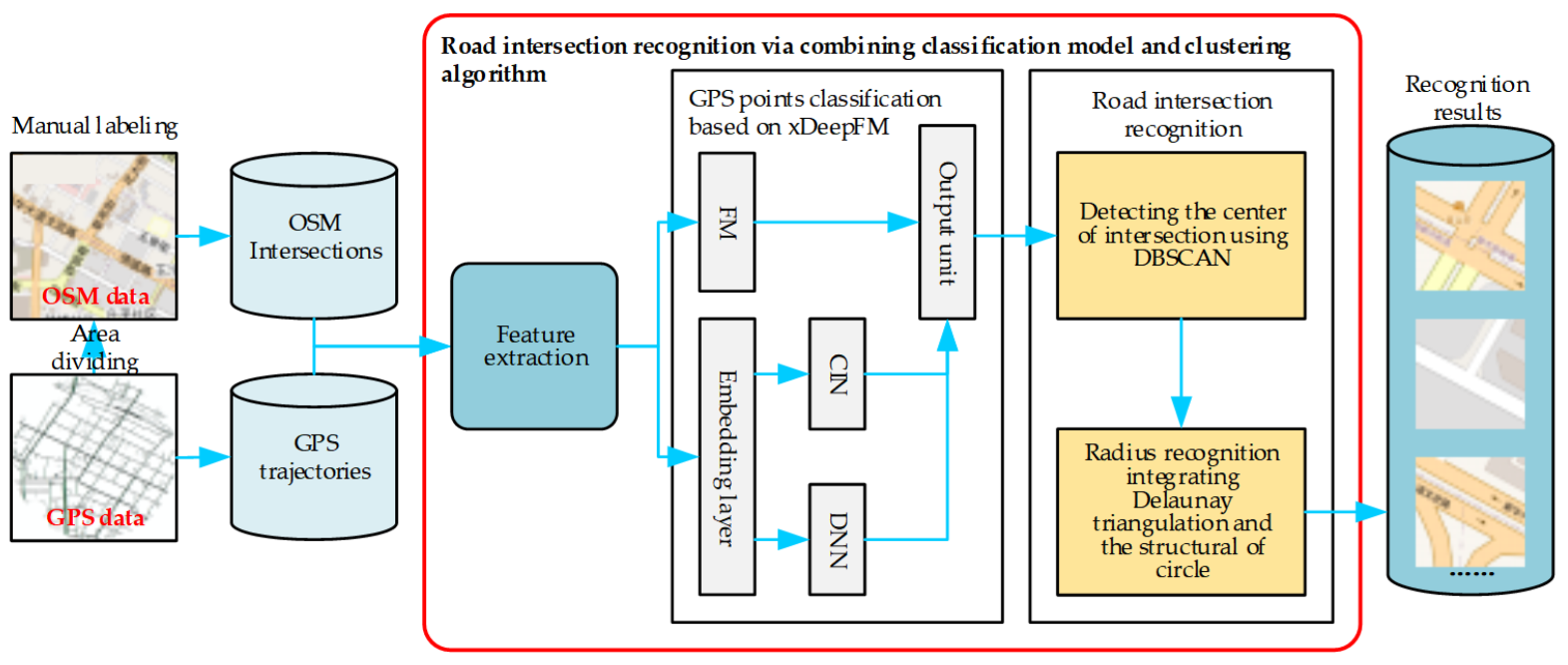
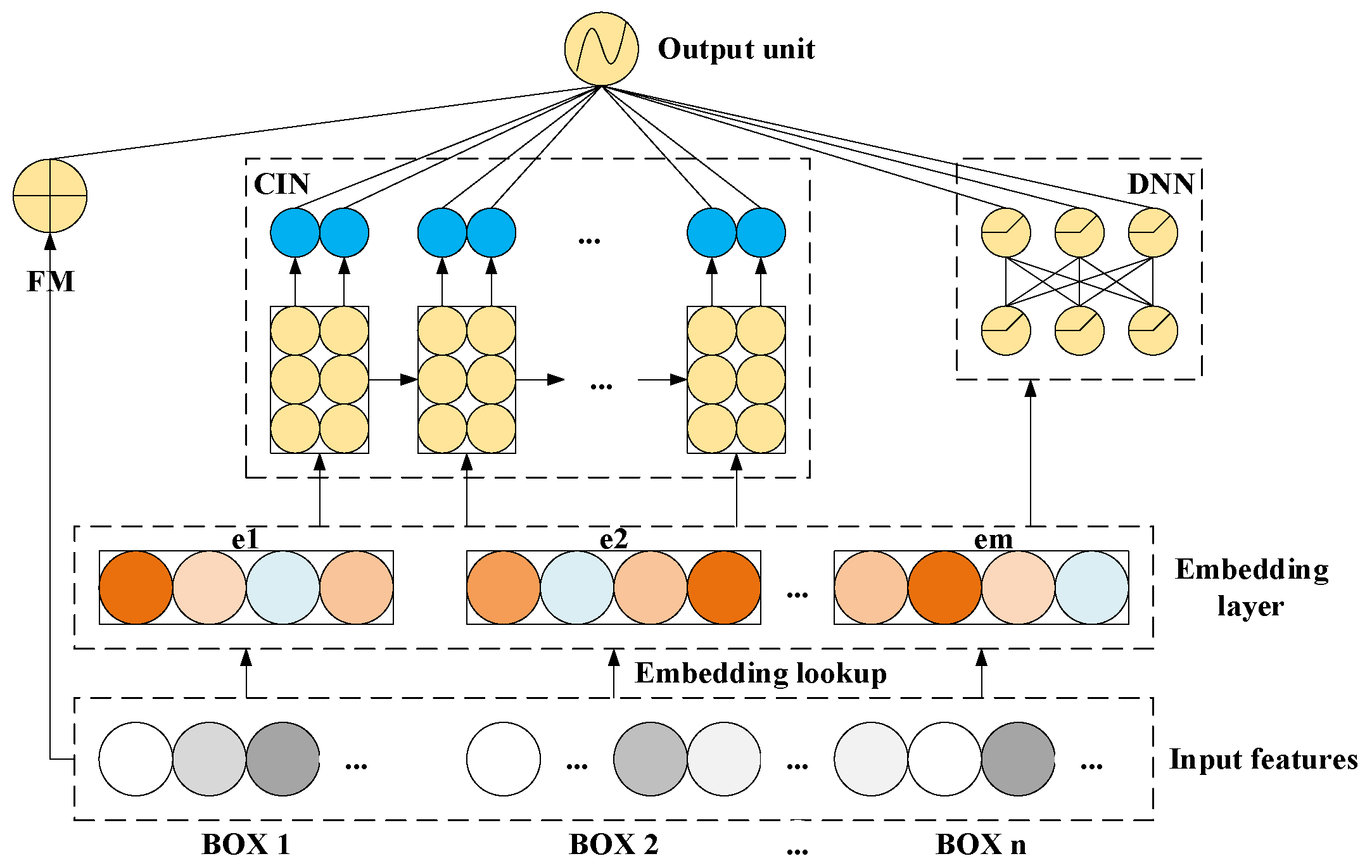
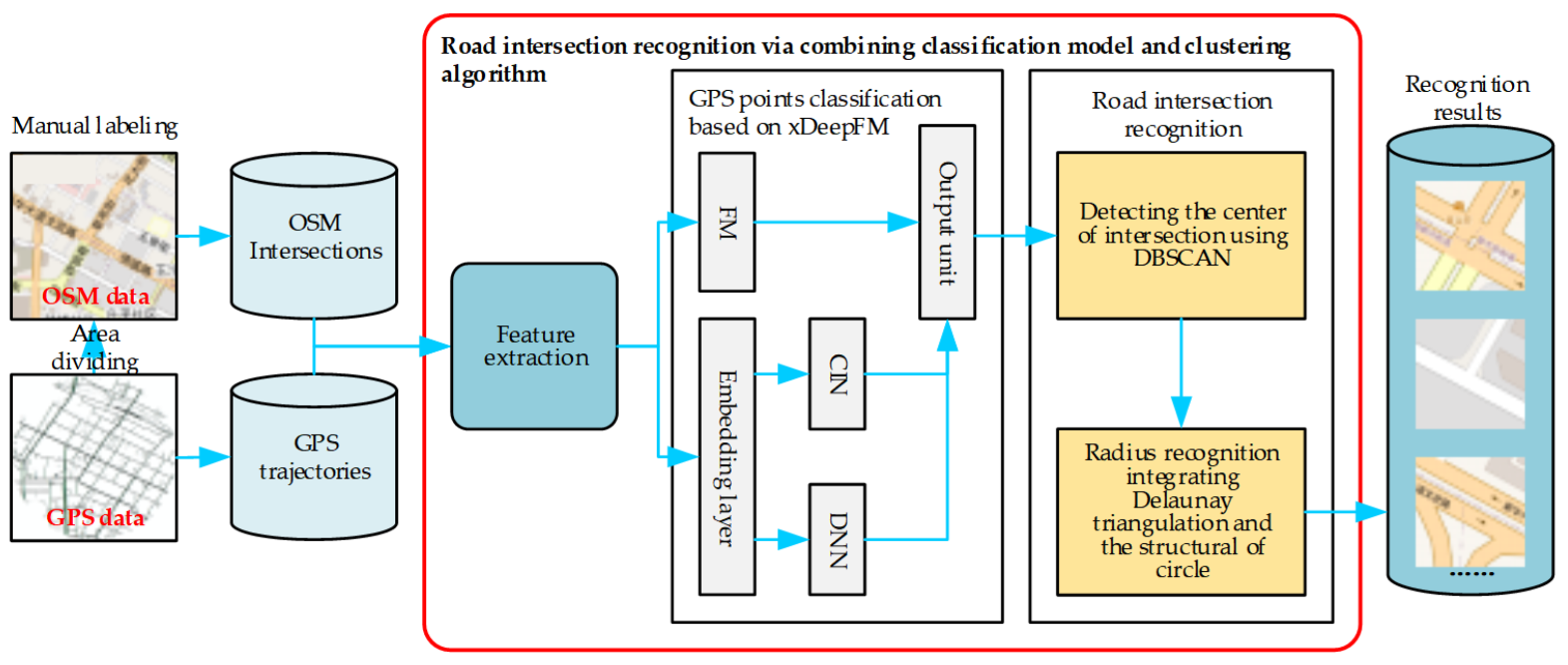
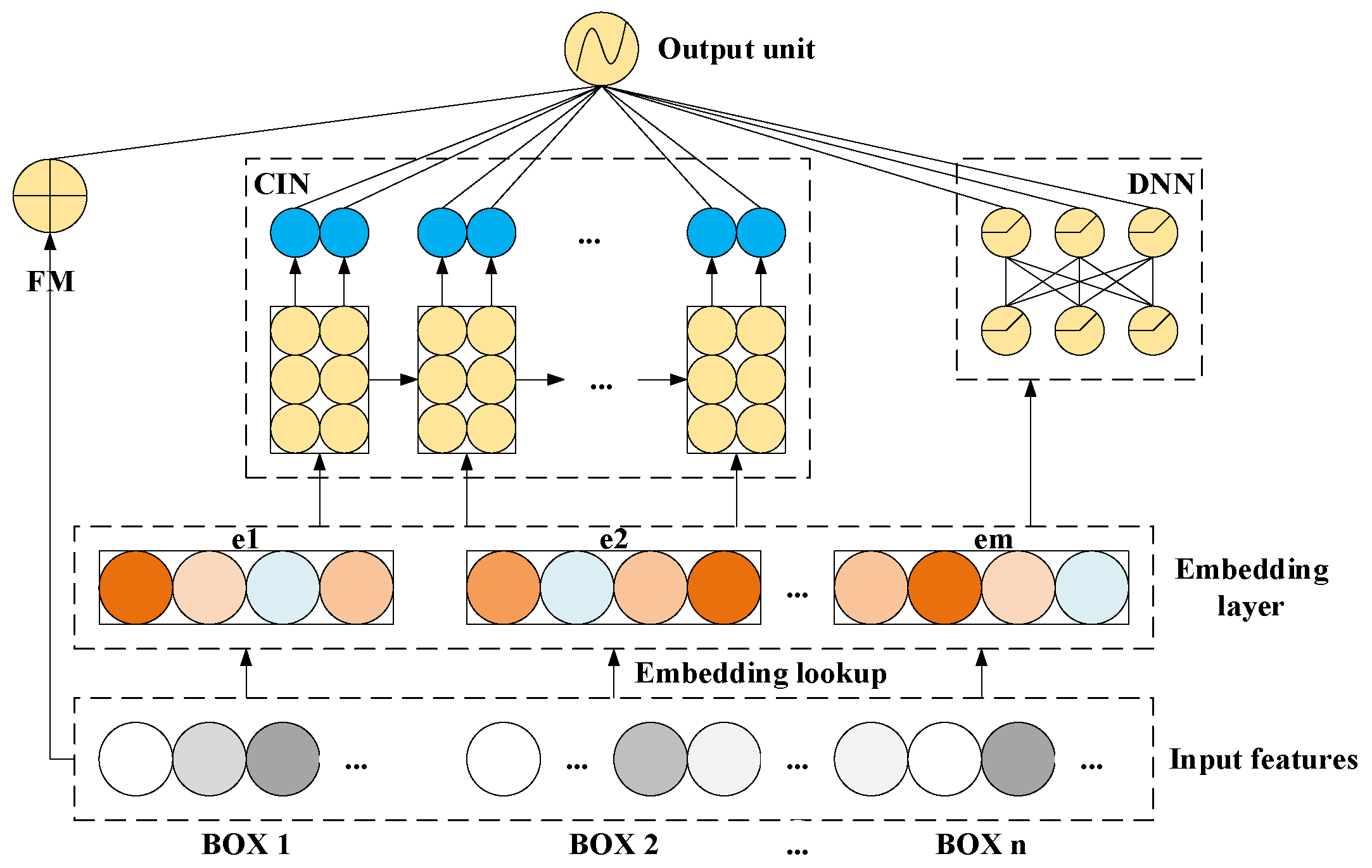
- We propose a novel approach of road intersection detection via combining the Extreme Deep Factorization Machine (xDeepFM) model and the Density-Based Spatial Clustering of Applications with Noise algorithm (DBSCAN). Experiments show that our approach reaches a higher precision compared with some state-of-the-art classification models and clustering algorithms.
- (2)
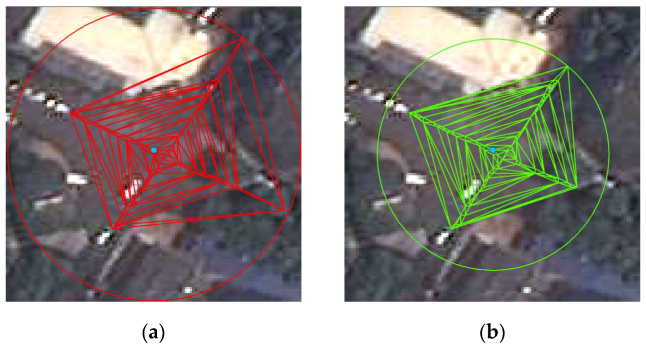
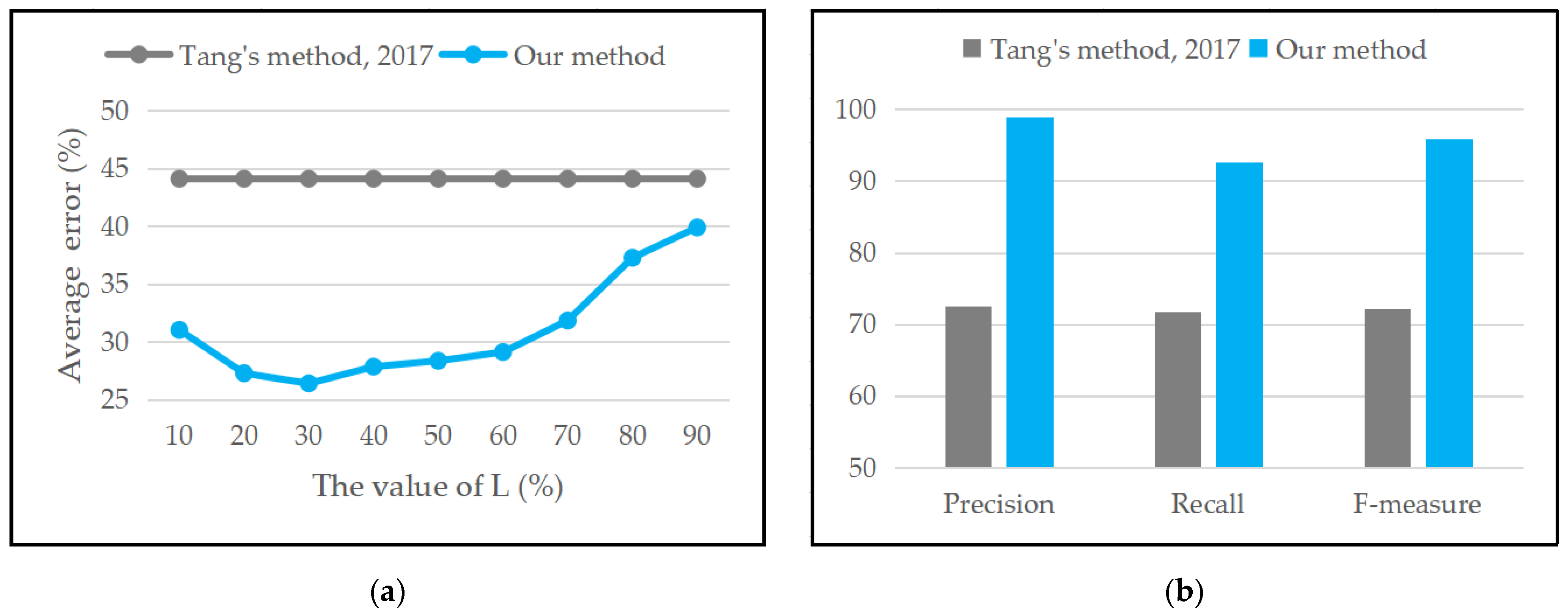
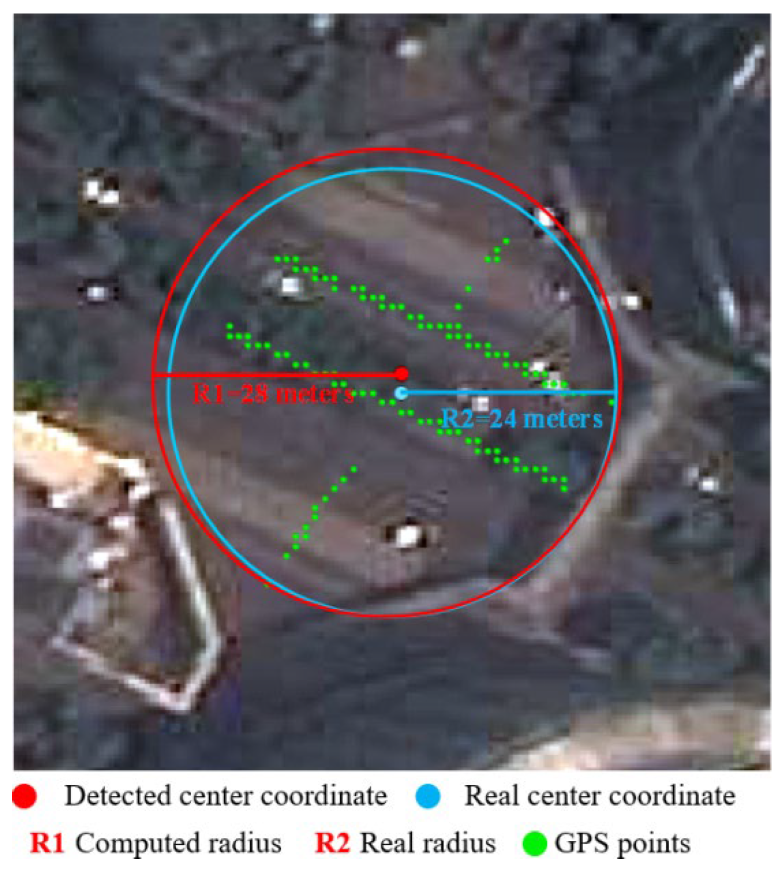
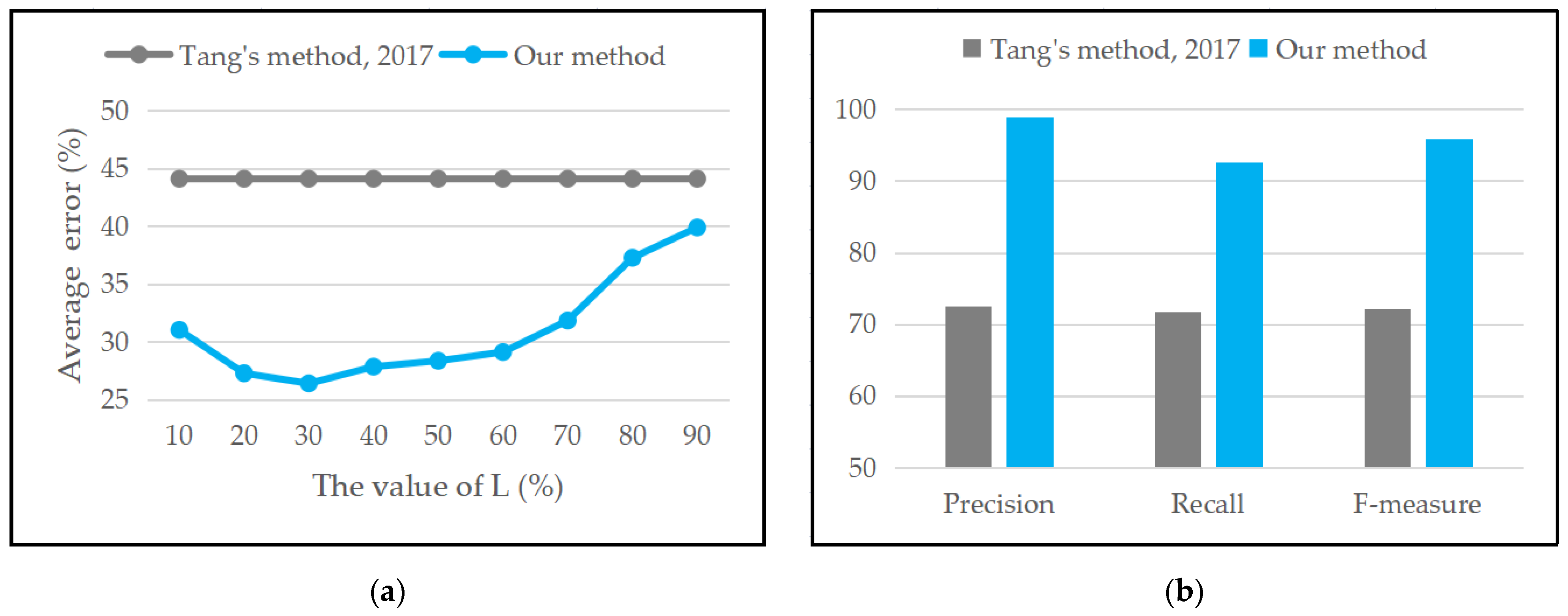
- A new method of radius computing is presented by integrating Delaunay triangulation with circle shape structure. It is able to compute the intersections’ radiuses with less error than Tang’s method [2], which is one of the typical methods in the field.
- (3)
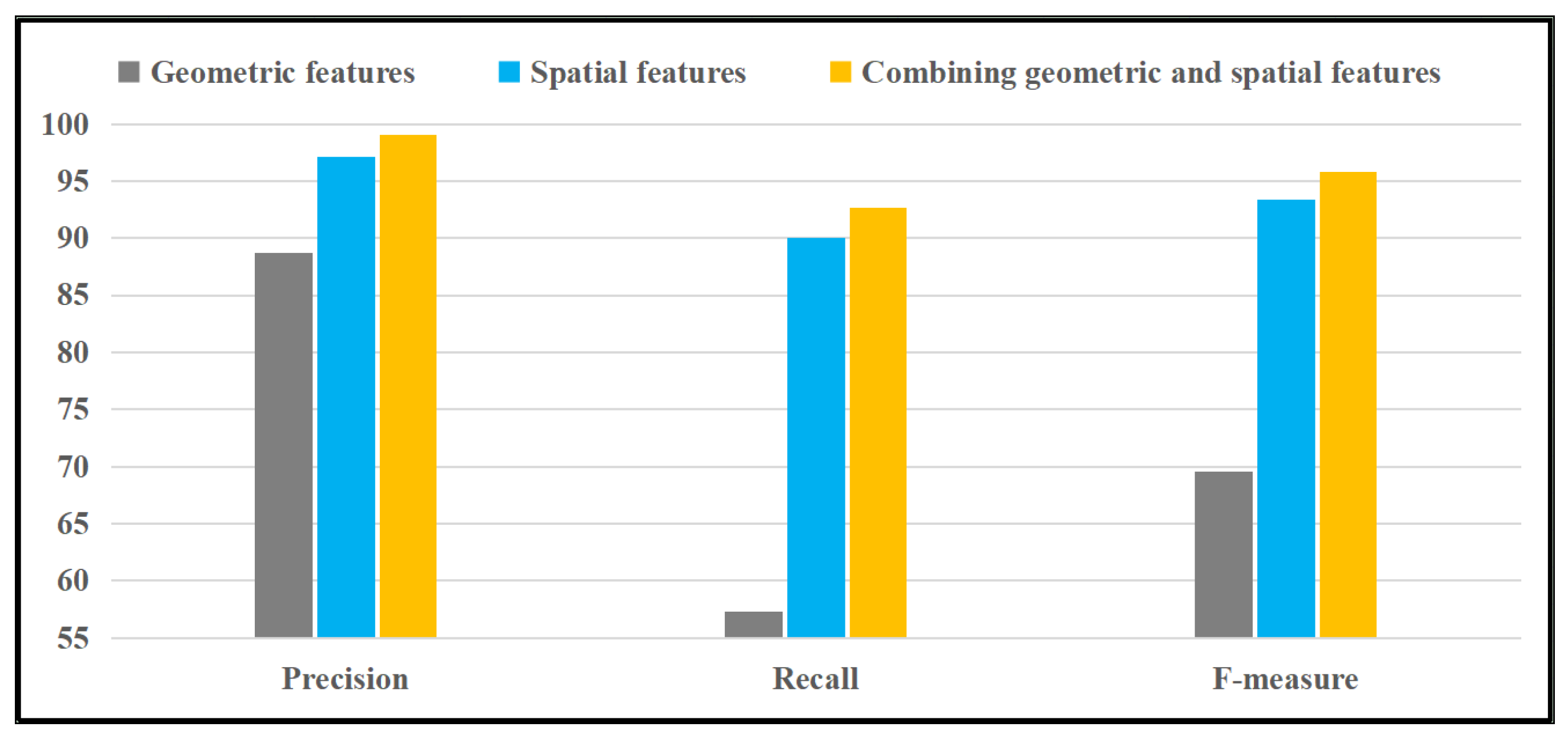
- Some spatial features in Section 3.1 are proposed to figure out, and are inputted into xDeepFM together with geometric features. In addition to geometric features, spatial features explored from GPS data and the interactions among all features are also important to represent intersections’ semantics more accurately. Experiments in Section 4.1 show that spatial features do better than geographic features, and the interactions among all features by xDeepFM further improve the performance of road intersection detection.
2. Related Work
3. Material and Methods
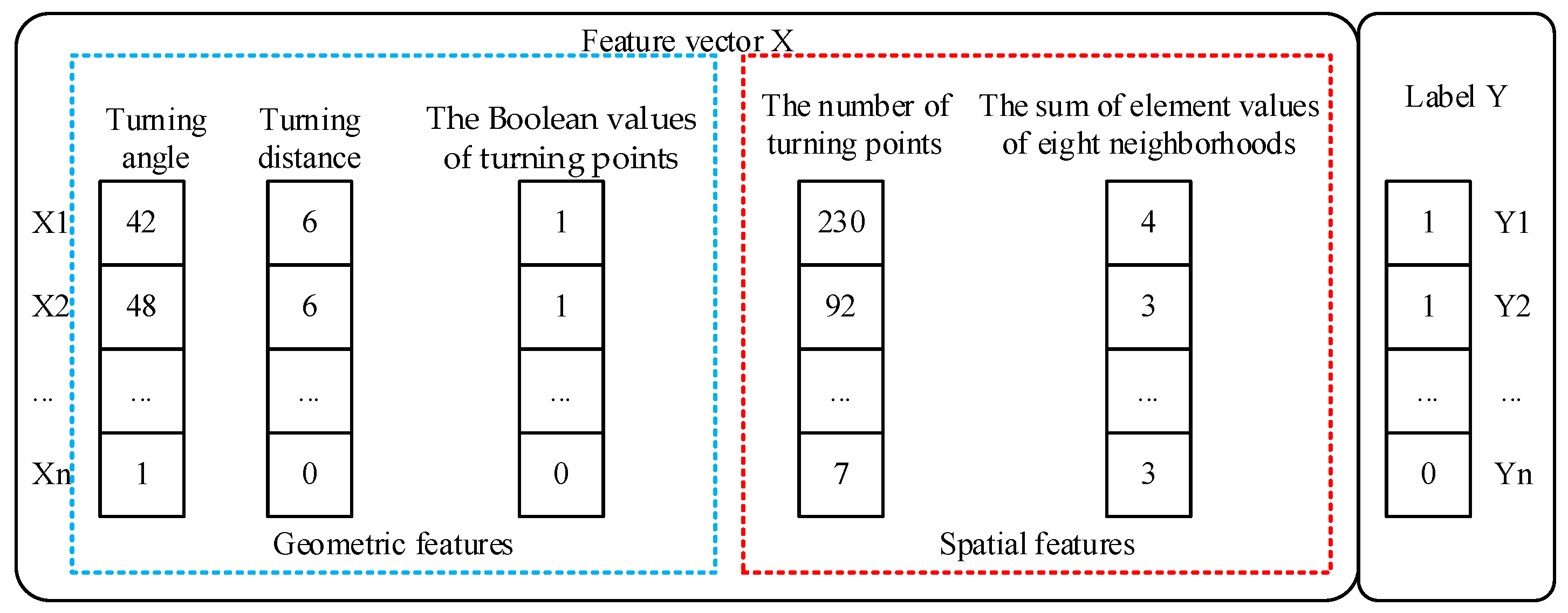
3.1. Feature Extraction and the Classification Model
- (1)
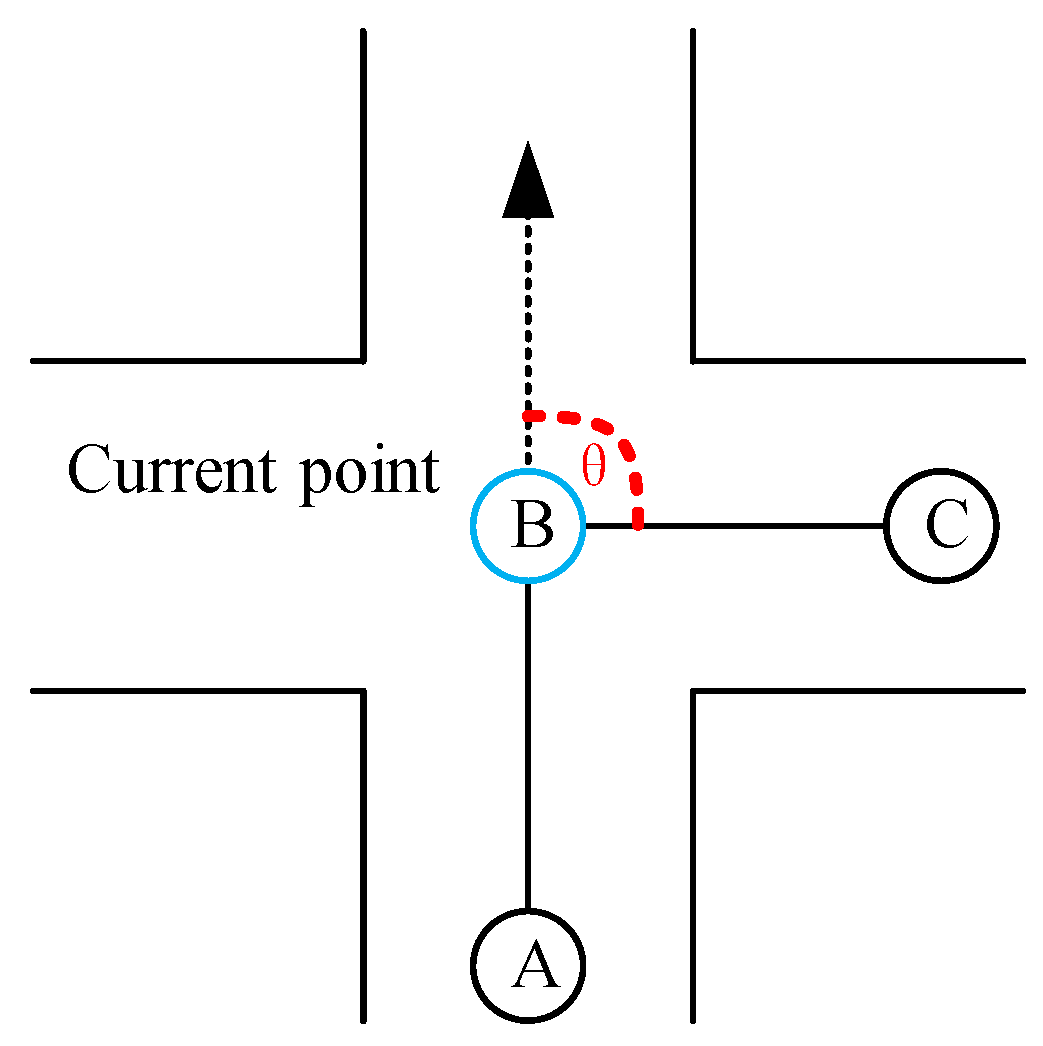
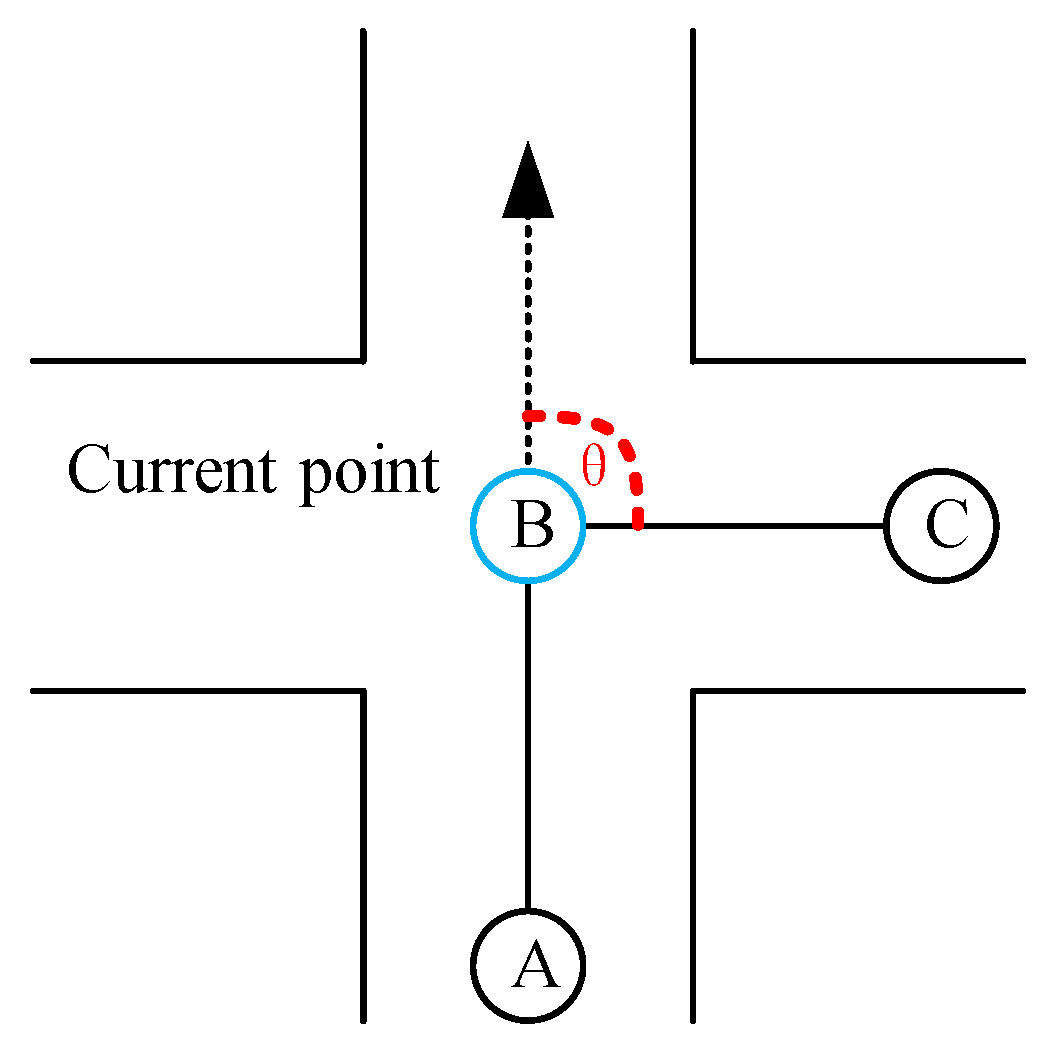
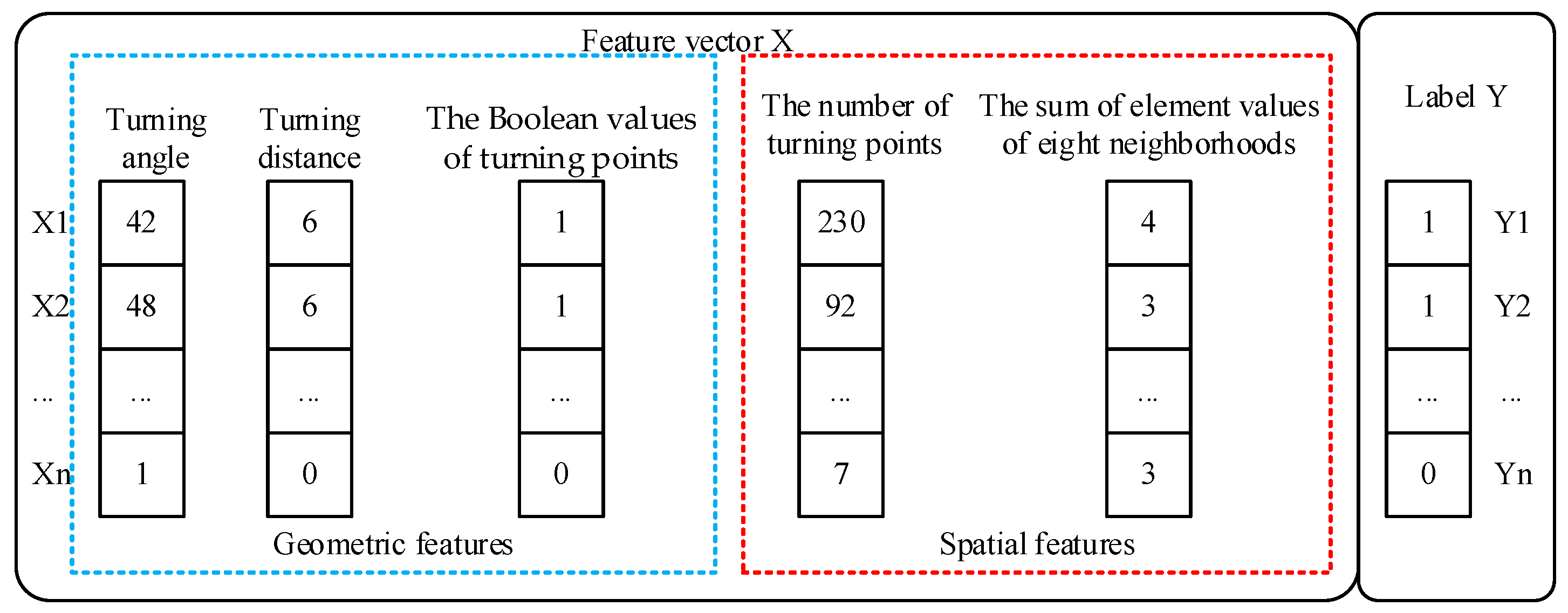
- Turning angles. The degree of changing direction is described as a turning angle. When the direction changes, the vehicle’s turning angle is larger than that of going straight [2]. The larger the turning angle of a trajectory point, the more likely it is to be at the intersection. In Figure 2, A, B, and C are the GPS points recorded in time order. The point B’s turning angle θ, shown as Figure 2, is calculated according to Equation (1).
- (2)
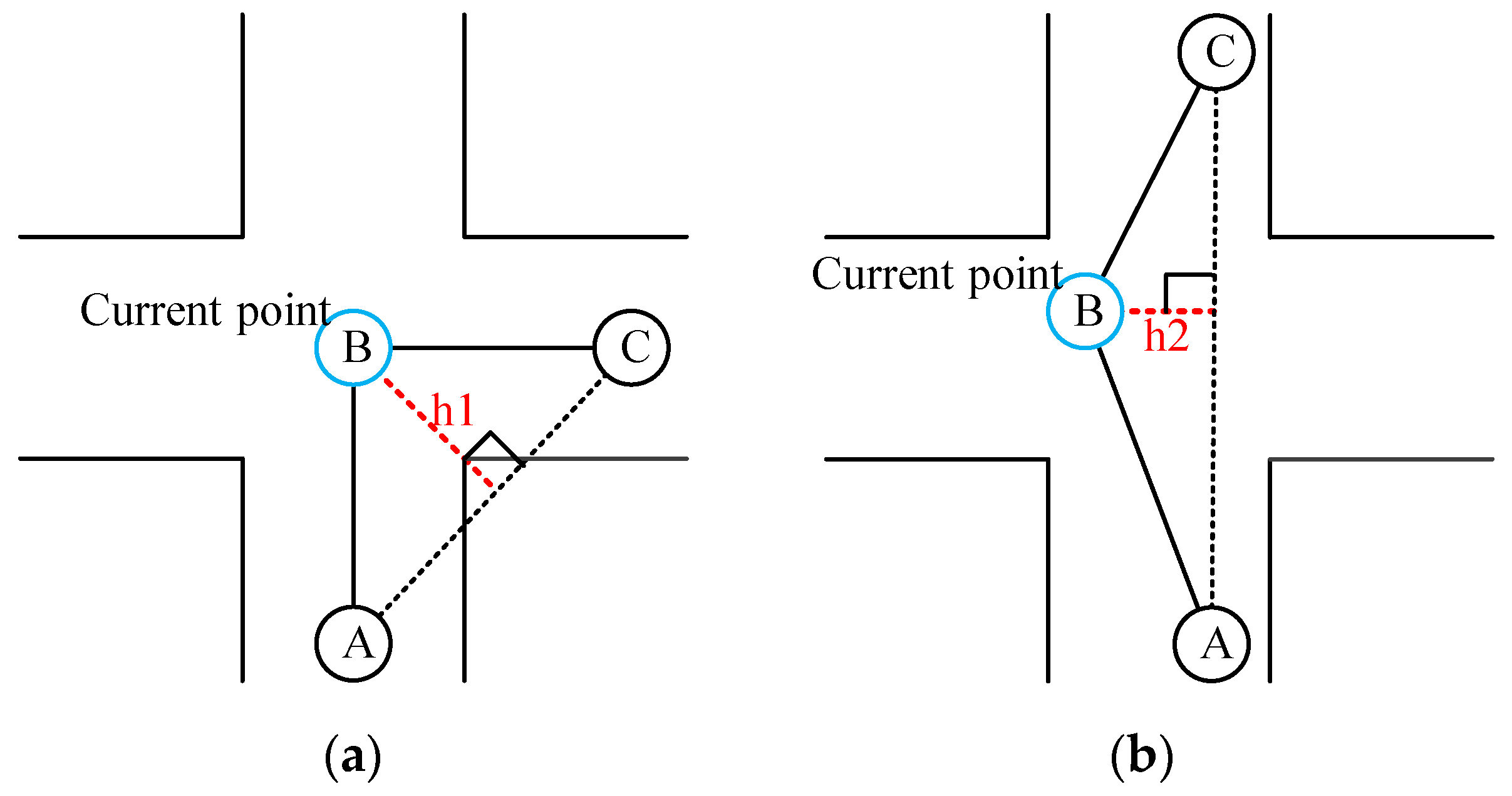
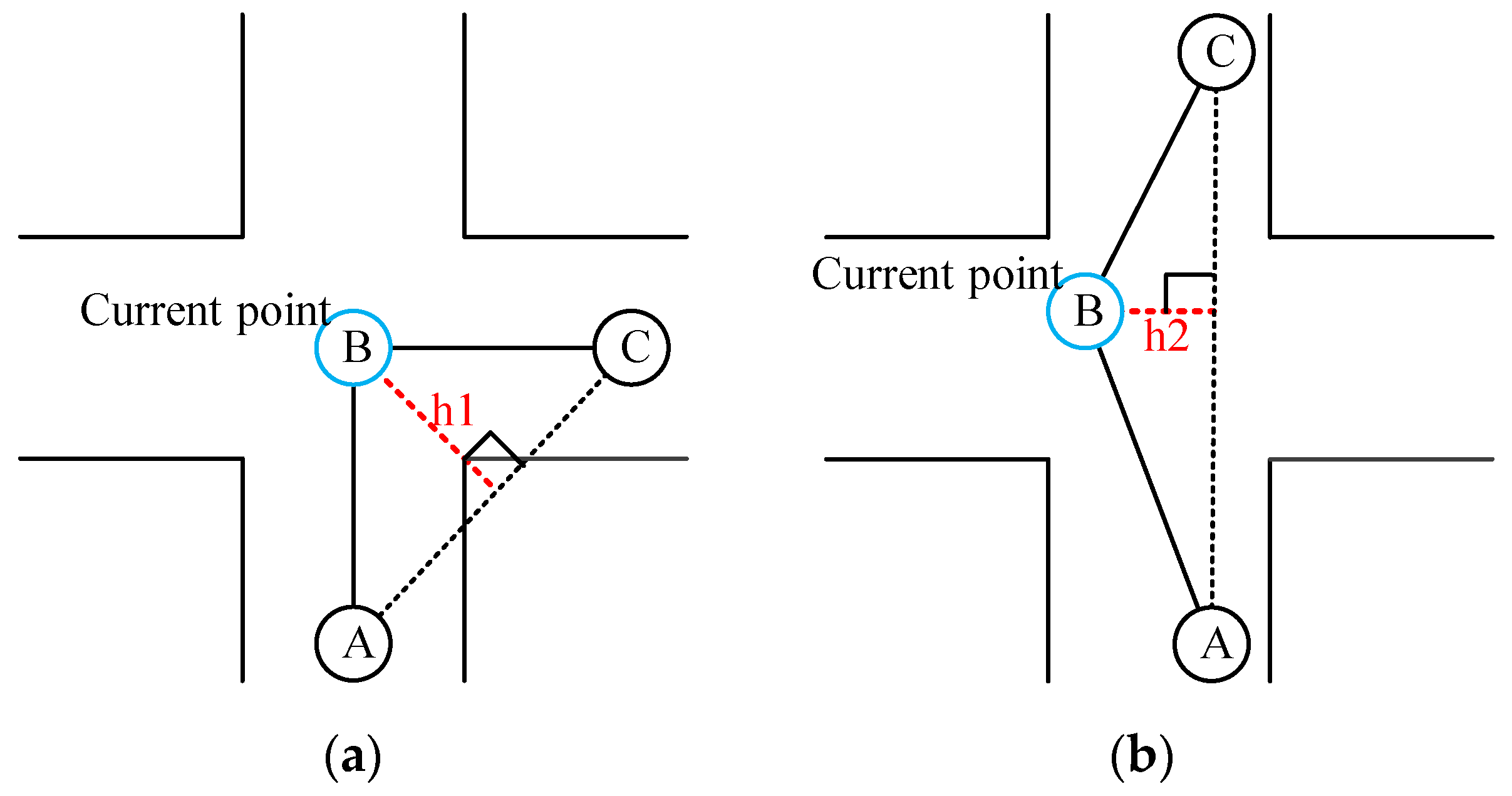
- Turning distances. The turning distance is the distance between the current point and the link line of its adjacent points. In Figure 3, A, B, and C are the GPS points recorded in time order. Figure 3a shows that h1 is point B’s turning distance. The value h1 is larger than h2 in Figure 3. It means that the turning distance generated when the vehicle changes direction is larger than that generated when the vehicle goes straight. The more the vehicle changes direction, the larger the turning distance. The larger the turning distance, the more likely the vehicle will be located within an intersection.
- (3)
- The Boolean values of turning points. In this paper, a point is a turning point if the point’s turning angle is larger than 15. Otherwise, it is a non-turning point. Usually, there are more turning points at intersections than at non-intersections [2]. Turning points are more likely to be at intersections than non-turning points.
- (4)
- The number of turning points. Wu et al. [15] believe that many turning points focus on an intersection, and intersection and non-intersection can be distinguished according to the density of turning points. Therefore, the number of turning points around a trajectory point is regarded as one of the features of this paper. The more turning points around a trajectory point, the higher the possibility that the trajectory point is located in an intersection.
- (5)
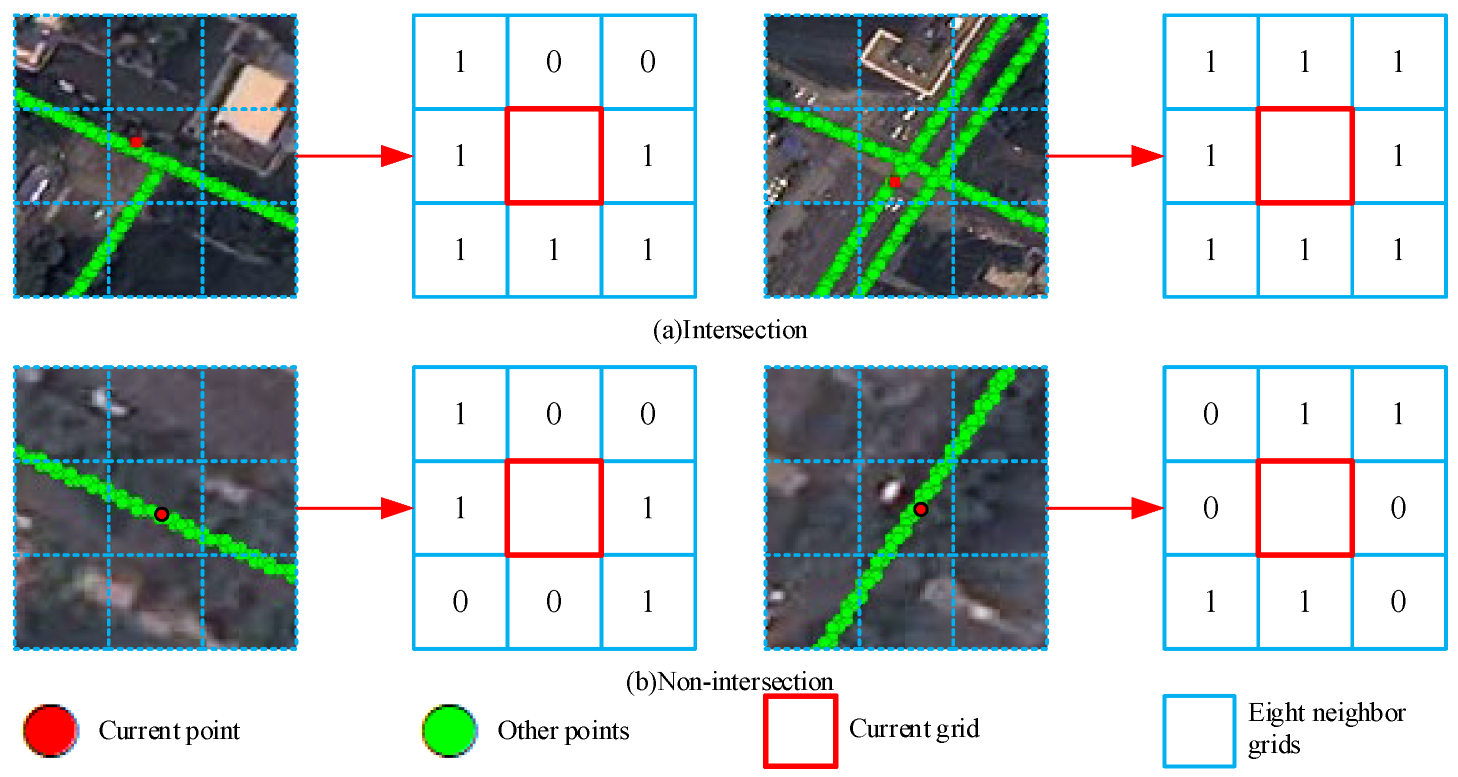
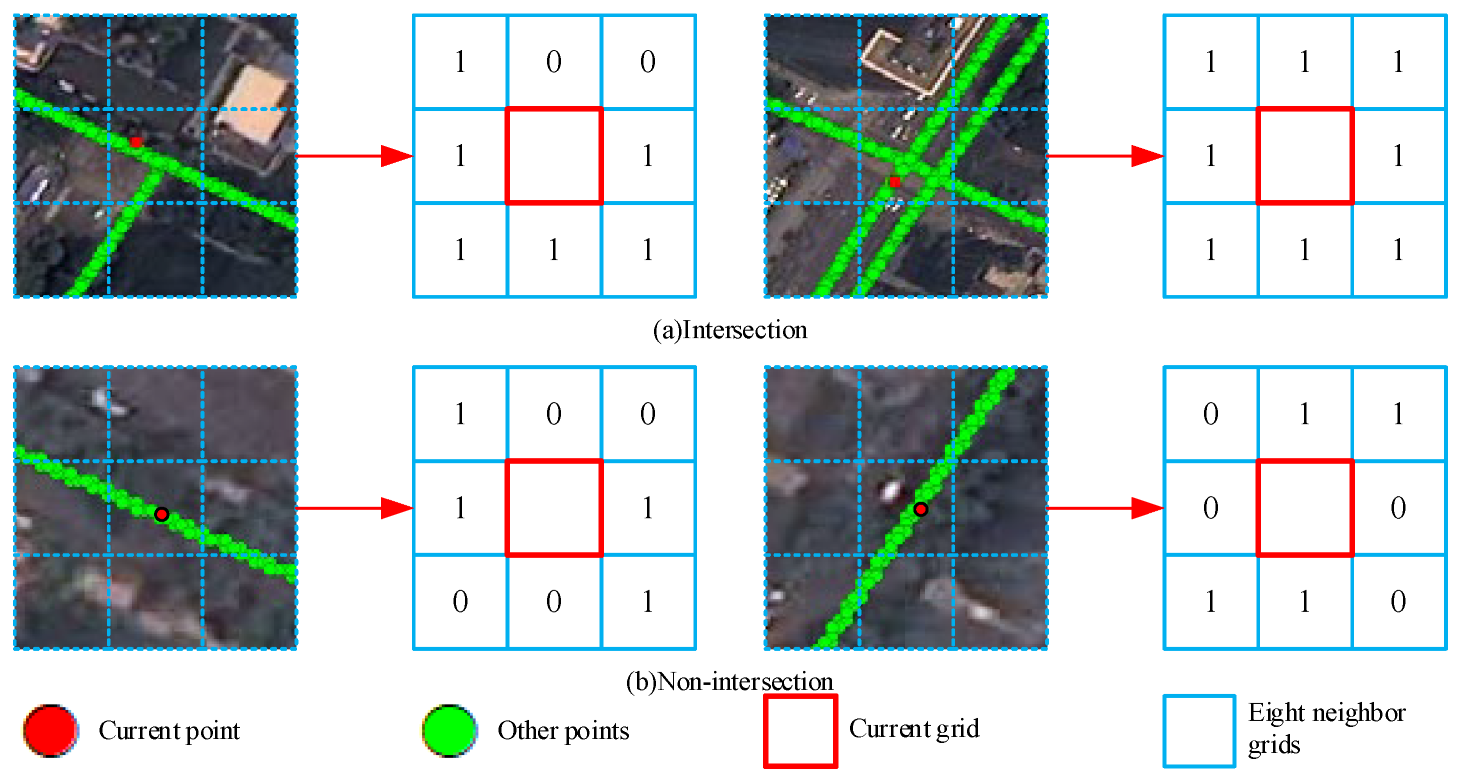
- The sum of element values of eight neighborhoods. In the literature [1], trajectory points are mapped to grids, and a method to determine intersection candidate points is proposed, which improves the accuracy of intersection center location detection. Therefore, this paper first uses a certain grid-scale to divide the experimental area. Then this paper maps trajectory points to corresponding grids and sets the element values of each grid. If there are points in the grid, the element value of the grid is 1; otherwise, it is 0.
3.2. Road Intersection Recognition
| Algorithm 1: Center coordinate detection algorithm via combining classification model and clustering algorithm. |
| Step 1: Initialize all the points as unvisited. Step 2: If all the points are visited, output cluster set C. Otherwise, randomly pick a point p from unvisited points and label it as visited. Step 3: p_neighbor is p’s neighbor points. Calculate p’s neighbor number p_num. Step 4: If p_num is larger than the threshold N, build an array c and an array X. Collecting p into c and collecting p_neighbor into X. Otherwise, labeling p as noise. Step 5: If all the points in X are visited, go to Step 8. Otherwise, select an unvisited point in X and label it as visited. Step 6: Count the number x_num of x’s neighbor points. x_neighbor represents x’s neighbor points. Step 7: If x_num is bigger than N, collect x into c, collect x_neighbor into X, and go back to Step 5. |
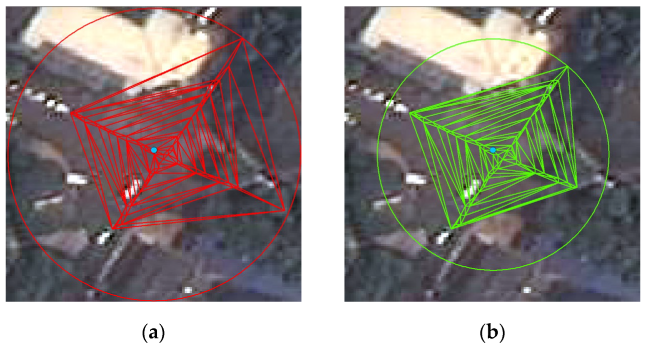
| Algorithm 2: Radius computing algorithm by integrating Delaunay triangulation with circle shape structure |
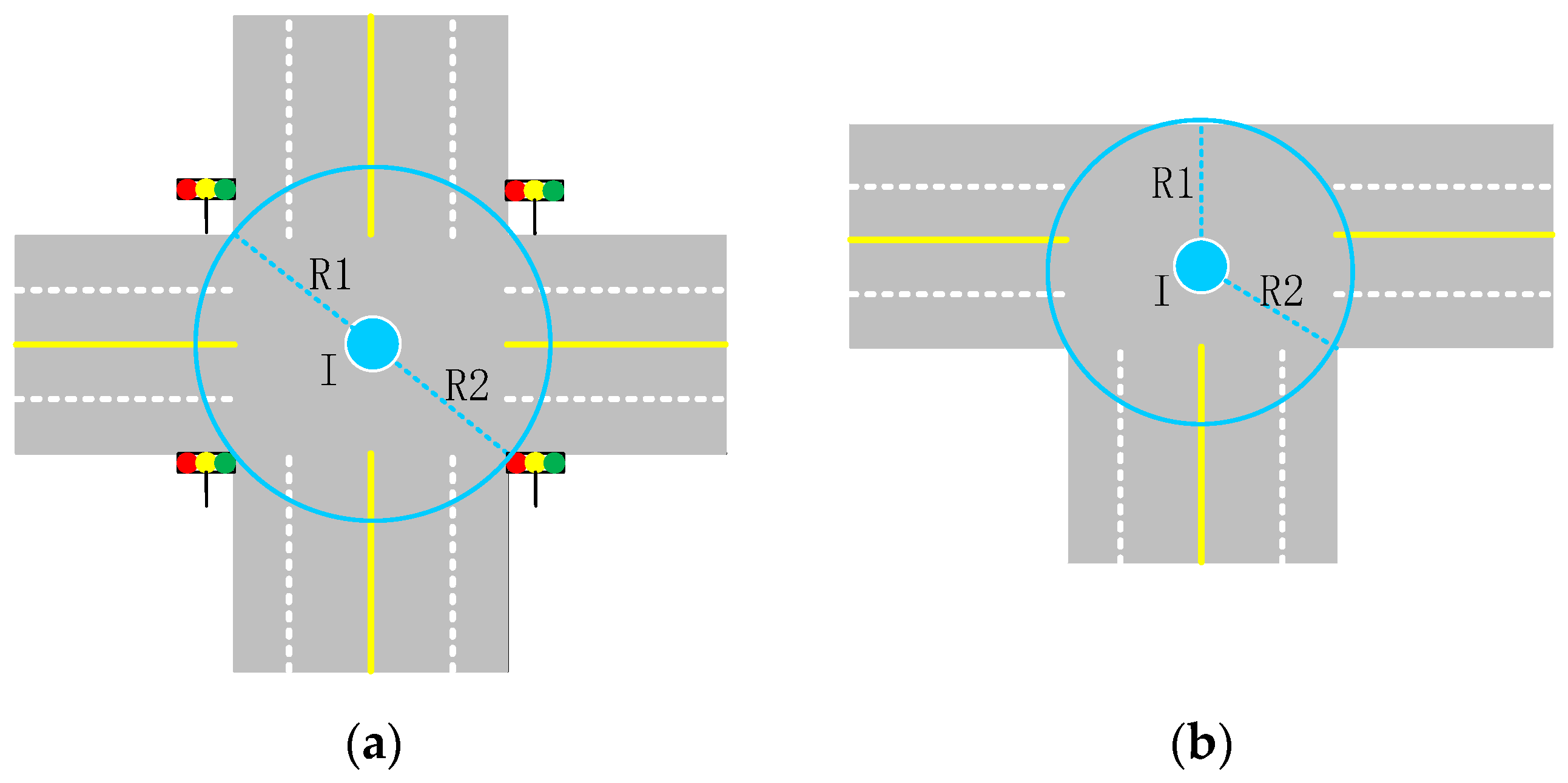
| Step 1: For a cluster c in C, compute its central location and label it as intersection I. Step 2: Use Delaunay triangulation in c and label the result as D. Step 3: Compute the length of each edge as e, and collect them in an ascending array Y. Step 4: Select the e at the top L% labeling as e_length, delete the edges that the length is bigger than e_length, and remove the points linked to those edges. Step 5: Compute the distance between the remaining points in c and intersection I, and use the max distance as the radius of intersection I. |
4. Results and Discussion
4.1. Performance Evaluation of Road Intersection Detection
4.2. Performance Evaluation of Radius Computing
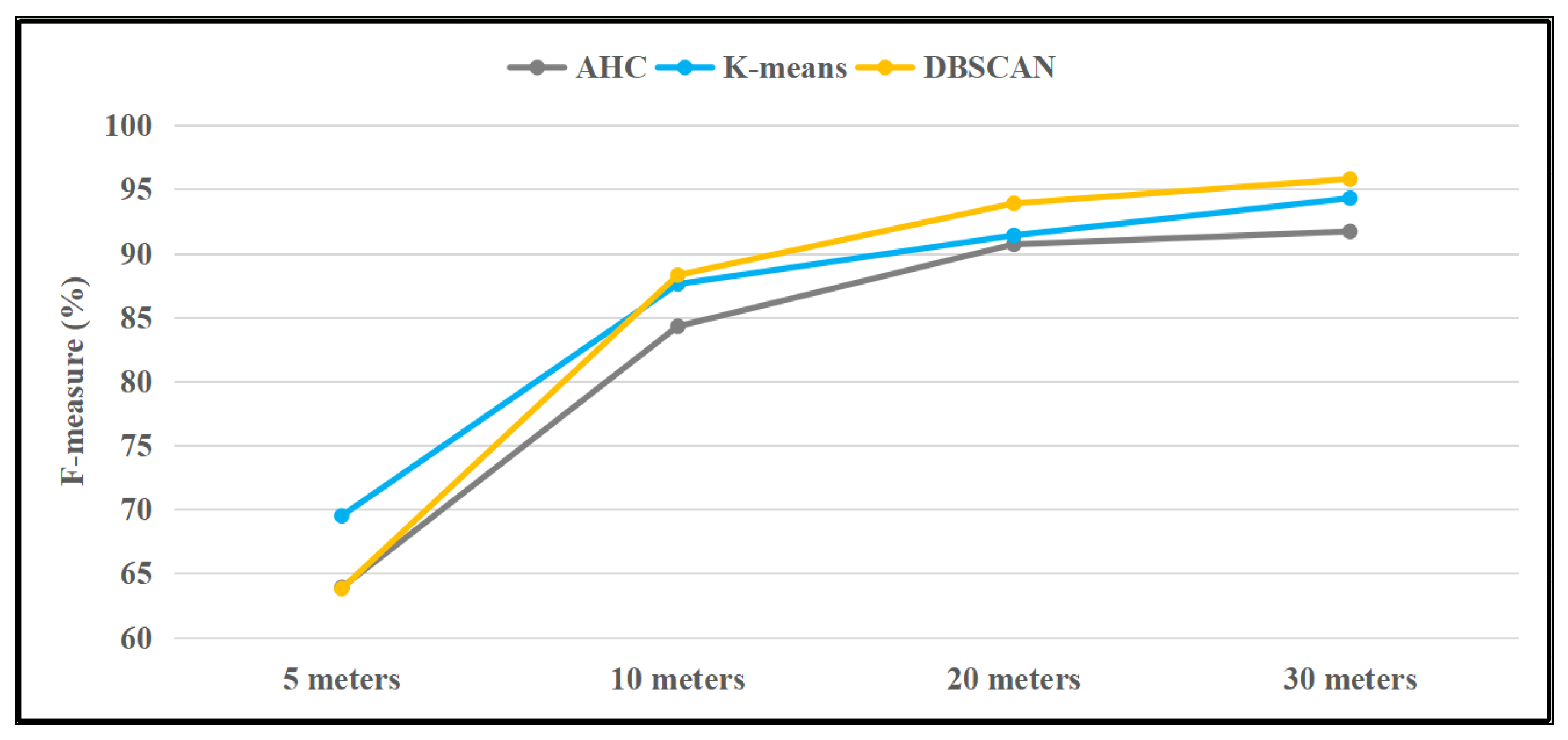
4.3. Performance Comparison of Clustering Algorithms and Feature Matrixes
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, S.; Xiang, L.; Zhang, C.; Gong, J. Extraction of urban road network intersections based on low-frequency taxi trajectory data. J. Geo-Inf. Sci. 2019, 21, 1845–1854. [Google Scholar]
- Tang, L.; Niu, L.; Yang, X.; Zhang, X.; Li, Q.; Xiao, S. Urban intersection recognition and construction based on big trace data. Acta Geod. Cartogr. Sin. 2017, 46, 770–779. [Google Scholar]
- Cheng, F.; Xiang, L.; Shao, X. Trajectory-network dynamic topological process model and its application in traffic information analysis. J. Geomat. 2019, 44, 39–43. [Google Scholar]
- Jepsen, T.; Jensen, C.; Nielsen, T. Graph convolutional networks for road networks. In Proceedings of the 27th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Chicago, IL, USA, 5–8 November 2019; pp. 460–463. [Google Scholar]
- Chiang, Y.; Knoblock, C.; Shahabi, C.; Chen, C. Automatic and accurate extraction of road intersections from raster maps. GeoInformatica 2009, 13, 121–157. [Google Scholar] [CrossRef]
- Cai, H.; Yao, G. Auto-extraction of road intersection from high resolution remote sensing image. Remote Sens. Nat. Resour. 2016, 28, 63–71. [Google Scholar]
- Wang, L.; Liu, Z.; Jin, F.; Wang, F. Research on automatic recognition algorithm of road intersection. Sci. Surv. Mapp. 2020, 45, 126–131. [Google Scholar]
- Jiang, Y. Research on road extraction of remote sensing image based on convolutional neural network. EURASIP J. Image Video Processing 2019, 1, 31. [Google Scholar] [CrossRef]
- Li, X.; Zhang, Y. Summary of road information extraction methods. Bull. Surv. Mapp. 2020, 6, 22–27. [Google Scholar]
- Chen, B.; Ding, C.; Ren, W.; Xu, G. Extended classification course improves road intersection detection from low-frequency GPS trajectory data. ISPRS Int. J. Geo-Inf. 2020, 9, 181. [Google Scholar] [CrossRef]
- Wu, H.; Huang, R.; You, L.; Xiang, L. Recent progress in taxi trajectory data mining. Acta Geod. Cartogr. Sin. 2019, 48, 1341–1356. [Google Scholar]
- Gan, M.; Qing, S.; Liu, X.; Li, D. Review on application of truck trajectory data in highway freight system. J. Transp. Syst. Eng. Inf. Technol. 2021, 21, 91–101. [Google Scholar]
- Gao, Y.; Wang, D.; Feng, H.; Shi, Y. Identifying urban intersections with GPS trajectories. Data Anal. Knowl. Discov. 2019, 3, 24–34. [Google Scholar]
- Wei, Y.; Ting, A.; Wei, L. A method for extracting road boundary information from crowdsourcing vehicle GPS trajectories. Sensors 2018, 18, 1261. [Google Scholar]
- Wu, J.; Zhu, Y.; Ku, T.; Wang, L. Detecting road intersections from coarse-gained GPS traces based on clustering. J. Comput. 2013, 8, 2959–2965. [Google Scholar]
- Tan, X.; Wang, J.; Song, X.; Xu, C.; Wang, C. Detection of road intersections using floating car data. Geogr. Geo-Inf. Sci. 2015, 31, 34–38. [Google Scholar]
- Li, L.; Li, D.; Xing, X.; Yang, F.; Rong, W.; Zhu, H. Extraction of road intersections from GPS traces based on the dominant orientations of roads. ISPRS Int. J. Geo-Inf. 2017, 6, 403. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Song, X.; Raghavan, V. Automatic intersection and traffic rule detection by mining motor-vehicle GPS trajectories. Comput. Environ. Urban Syst. 2017, 64, 19–29. [Google Scholar] [CrossRef]
- Wan, Z.; Li, L.; Yang, M.; Zhou, X. Decision tree model for extracting road intersection feature from vehicle trajectory data. Acta Geod. Cartogr. Sin. 2019, 48, 1391–1403. [Google Scholar]
- Deng, M.; Huang, J.; Zhang, Y.; Liu, H.; Tang, L.; Tang, J.; Yang, X. Generating urban road intersection models from low-frequency GPS trajectory data. Int. J. Geogr. Inf. Sci. 2018, 32, 2337–2361. [Google Scholar] [CrossRef]
- Xie, X.; Philips, W. Road intersection detection through finding common sub-tracks between pairwise GNSS traces. ISPRS Int. J. Geo-Inf. 2017, 6, 311. [Google Scholar] [CrossRef]
- Xie, X.; Liao, W.; Aghajan, H.; Veelaert, P.; Philips, W. Detecting road intersections from GPS traces using longest common subsequence algorithm. ISPRS Int. J. Geo-Inf. 2017, 6, 1. [Google Scholar] [CrossRef]
- Fathi, A.; Krumm, J. Detecting road intersections from GPS traces. In Proceedings of the International Conference On Geographic Information Science, Zurich, Switzerland, 14–17 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 56–69. [Google Scholar]
- Lian, J.; Zhou, X.; Zhang, F.; Chen, Z.; Xie, X.; Sun, G. xdeepfm: Combining explicit and implicit feature interactions for recommender systems. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 1754–1763. [Google Scholar]
- Ai, T.; Ke, S.; Yang, M.; Li, J. Envelope generation and simplification of polylines using Delaunay triangulation. Int. J. Geogr. Inf. Sci. 2017, 31, 297–319. [Google Scholar] [CrossRef]
- Tang, L.; Ren, C.; Liu, Z.; Li, Q. A road map refinement method using Delaunay triangulation for big trace data. ISPRS Int. J. Geo-Inf. 2017, 6, 45. [Google Scholar] [CrossRef] [Green Version]
- Zheng, W.; Zhou, X.; Li, H.; Wu, H.; Tang, Z. Safety identification and recognition system of shunting yard based on the spatial analysis of GIS and deep learning. J. Saf. Environ. 2020, 20, 423–432. [Google Scholar]
- Rendle, S. Factorization machines. In Proceedings of the the 10th IEEE International Conference on Data Mining, Sydney, Australia, 14–17 December 2010; pp. 995–1000. [Google Scholar]
- Guo, H.; Tang, R.; Ye, Y.; Li, Z.; He, X. DeepFM: A factorization-machine based neural network for CTR prediction. In Proceedings of the 26th International Joint Conference on Artificial Intelligence, Melbourne, Australia, 19–25 August 2017; pp. 1725–1731. [Google Scholar]
- Sun, L.; Jia, L.; Wei, Z.; Li, J. Demand forecasting of taxi travel based on GPS data. J. Transp. Inf. Saf. 2021, 39, 128–136. [Google Scholar]
- Santhosh, K.; Dogra, D.; Roy, P.; Mitra, A. Vehicular trajectory classification and traffic anomaly detection in videos using a hybrid CNN-VAE architecture. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11891–11902. [Google Scholar] [CrossRef]
- Santhosh, K.; Dogra, D.; Roy, P. Temporal unknown incremental clustering model for analysis of traffic surveillance videos. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1762–1773. [Google Scholar] [CrossRef]
- Santhosh, K.; Dogra, D.; Roy, P. Queuing theory guided intelligent traffic scheduling through video analysis using Di-richlet process mixture model. Expert Syst. Appl. 2019, 118, 169–181. [Google Scholar]
- Li, J.; Xie, H.; Yu, L.; Gao, X.; Zhang, Y. Discriminative feature mining based on frequency information and metric learning for face forgery detection. IEEE Trans. Knowl. Data Eng. 2021, 1. [Google Scholar] [CrossRef]
- Dai, H.; Shi, H.; Liu, W.; Wang, L.; Liu, Y.; Mei, T. FasterPose: A faster simple baseline for human pose estimation. ACM Trans. Multimed. Comput. Commun. Appl. 2022, 18, 1–16. [Google Scholar] [CrossRef]
- Hu, Z.; Xie, H.; Yu, L.; Gao, X.; Shang, Z.; Zhang, Y. Dynamic-aware federated learning for face forgery video detection. ACM Trans. Intell. Syst. Technol. 2022, 13, 1–25. [Google Scholar] [CrossRef]
- Wang, X.; Liu, W.; Chen, J.; Wang, X.; Yan, C.; Mei, T. Listen, look, and find the one: Robust person search with multimodality index. ACM Trans. Multimed. Comput. Commun. Appl. 2020, 16, 1–20. [Google Scholar] [CrossRef]
- Hong, G.; Kim, B.; Dogra, D.; Roy, P. A survey of real-time road detection techniques using visual color sensor. J. Multimed. Inf. Syst. 2018, 5, 9–14. [Google Scholar]
- Ahmed, S.; Dogra, D.; Kar, S.; Roy, P. Trajectory-based surveillance analysis: A survey. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 1985–1997. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, W.; Liu, Y.; Liao, Z. Discovering transition patterns among OpenStreetMap feature classes based on the Louvain method. Trans. GIS 2021, 26, 236–258. [Google Scholar] [CrossRef]
- Liao, Z.; Xiao, H.; Liu, S.; Liu, Y.; Yi, A. Impact assessing of traffic lights via GPS vehicle trajectories. ISPRS Int. J. Geo-Inf. 2021, 10, 769. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literatures | Cities | Clustering Algorithms | Classification Models | Other Algorithms | Precision (%) | Recall (%) | F-Measure (%) | The Matching Area’s Radius (m) |
|---|---|---|---|---|---|---|---|---|
| [1] | Wuhan | PDC | none | PCA, morphology | 92.23 | 77.26 | 84.08 | none |
| [2] | Wuhan | LPC | none | none | 93.1 | 96.1 | none | none |
| [10] | Shenzhen | none | none | Delaunay, thinning | 87.93 | 75.76 | 82.0 | 40 |
| [13] | Beijing | none | KNN | GeoHash | 87.0 | 76.0 | 82.0 | 50 |
| [16] | Huaibei | DBSCAN | none | none | 91.6 | none | none | none |
| [17] | Chengdu | mean shift | none | PCA | 96.2 | none | none | 50 |
| [18] | Suzhou | mean shift | none | KDE | 94.7 | 92.88 | none | none |
| [19] | Cologne | none | DT | none | 93.2 | 92.8 | none | none |
| [20] | Chicago | none | none | Delaunay, K-segment | 93.6 | 65.67 | 77.19 | none |
| [21] | Chicago | none | none | KDE | 80.0 | None | none | 50 |
| [22] | Chicago | none | none | KDE, DP | 85.0 | None | none | 50 |
| [23] | Seattle | none | shape descriptor | none | 76.0 | None | none | none |
| The Matching Area’s Radius | Evaluation Metrics (%) | KNN | LR | FM | DeepFM | Ours |
|---|---|---|---|---|---|---|
| 5 m | Precision | 17.5 | 20.6 | 68.6 | 63.1 | 66.0 |
| Recall | 16.4 | 19.1 | 63.6 | 59.1 | 61.8 | |
| F-measure | 16.9 | 19.8 | 66 | 61 | 63.8 | |
| 10 m | Precision | 41.8 | 52.9 | 90.2 | 89.3 | 91.3 |
| Recall | 39.1 | 49.1 | 83.6 | 83.6 | 85.5 | |
| F-measure | 40.1 | 50.9 | 86.8 | 86.1 | 88.3 | |
| 20 m | Precision | 55.3 | 70.6 | 95.1 | 96.1 | 97.1 |
| Recall | 51.8 | 65.5 | 88.2 | 90 | 90.9 | |
| F-measure | 53.5 | 67.9 | 91.5 | 93 | 93.9 | |
| 30 m | Precision | 64.1 | 71.6 | 98.0 | 98.1 | 99.0 |
| Recall | 60.0 | 66.4 | 90.9 | 91.8 | 92.7 | |
| F-measure | 62.0 | 68.9 | 94.3 | 94.8 | 95.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Qing, R.; Zhao, Y.; Liao, Z. Road Intersection Recognition via Combining Classification Model and Clustering Algorithm Based on GPS Data. ISPRS Int. J. Geo-Inf. 2022, 11, 487. https://doi.org/10.3390/ijgi11090487
Liu Y, Qing R, Zhao Y, Liao Z. Road Intersection Recognition via Combining Classification Model and Clustering Algorithm Based on GPS Data. ISPRS International Journal of Geo-Information. 2022; 11(9):487. https://doi.org/10.3390/ijgi11090487
Chicago/Turabian StyleLiu, Yizhi, Rutian Qing, Yijiang Zhao, and Zhuhua Liao. 2022. "Road Intersection Recognition via Combining Classification Model and Clustering Algorithm Based on GPS Data" ISPRS International Journal of Geo-Information 11, no. 9: 487. https://doi.org/10.3390/ijgi11090487
APA StyleLiu, Y., Qing, R., Zhao, Y., & Liao, Z. (2022). Road Intersection Recognition via Combining Classification Model and Clustering Algorithm Based on GPS Data. ISPRS International Journal of Geo-Information, 11(9), 487. https://doi.org/10.3390/ijgi11090487