
Low-Frequency Trajectory Map Matching Method Based on Vehicle Heading Segmentation


Abstract
:1. Introduction
- (1)
- Methods based on machine learning
- (2)
- Methods based on probability calculation
- (3)
- Methods based on weight assignment
2. Methods
2.1. Basic Concepts and Problem Description
2.2. Low-Frequency Trajectory Map Matching Algorithm
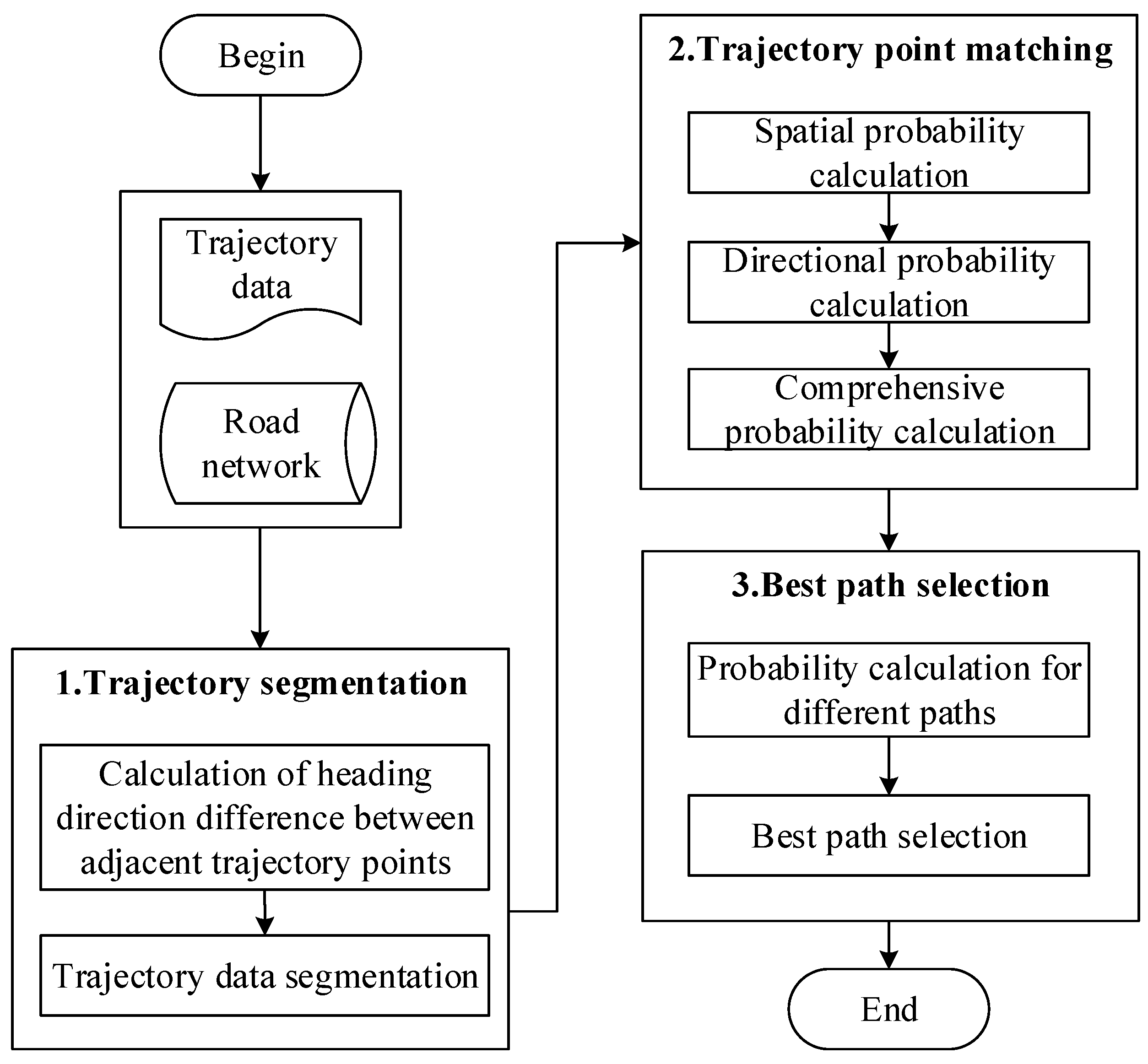
2.2.1. Algorithm Overview
- (1)
- Trajectory segmentation
- (2)
- Trajectory point matching
- (3)
- Best path selection
2.2.2. Trajectory Segmentation
| Algorithm 1: Trajectory segmentation |
| Input: Trajectory T Output: , ind = 2, cnt = 1; ; ; 4: for i = 3 to |T| do 5: if then 6: ind = ind + 1; ; 8: else 9: cnt = cnt + 1; ; ; 12: ind = 2; 13: end if 14: end for 15: return ; |
2.2.3. Trajectory Point Matching
| Algorithm 2: Trajectory point matching |
| Input:, Road Network G, Radius threshold r, Candidate value k Output: Candidate road segment set Cr, Comprehensive probability set Gw 1: Initialize Cr, N, H; 2: for each do 3: Construct a circle Ci with as center and r as radius; 4: Cr←Cr{the candidate road segments around Ci}; 5: for each Cr do 6: Nij←the spatial probability of calculated by Equation (3); 7: Hij←the heading probability of calculated by Equation (5); 8: Gwij←the comprehensive probability of calculated by Equation (6); 9: end for 10: end for 11: return Gw, Cr; |
2.2.4. Best Path Selection
| Algorithm 3: Best path selection |
| Input: Trajectory segment set , Road Network G, Candidate value k, Comprehensive probability set Gw Output: Final path set Path 1: Initialize k←{1,2,3,4,5}, Path; 2: Sort the candidate road segments according to Gw; 3: dist←the adjacency matrix of the link nodes in the sorted set of candidate road segments; 4: for each do 5: ←the different shortest paths obtained based on dist and different k values; 6: ←the best path obtained based on Equation (7); 7: end for 8: return Path; |
2.2.5. Algorithm Complexity Analysis
3. Results
3.1. Datasets
3.1.1. Road Network Dataset
3.1.2. Trajectory Dataset
3.2. Evaluation Indicators
3.2.1. Trajectory Point Matching Accuracy
3.2.2. Road Segment Matching Accuracy
3.2.3. Trajectory Point Matching Time
3.3. Parameter Setting
3.3.1. Segmentation Angle
3.3.2. Number of Candidate Paths
3.3.3. Sampling Frequency
3.4. Experimental Results
3.4.1. Experimental Comparison Results Based on Different Parameters
- (1)
- Experimental results at different segmentation angles
- (2)
- Experimental results under different candidate path values
- (3)
- Experimental results at different sampling frequencies
3.4.2. Comparison Results with Other Algorithms
4. Discussion
- (1)
- A new low-frequency trajectory map matching algorithm is proposed, which matches the segmentation of trajectory data according to the driving direction of location points and improves the matching accuracy;
- (2)
- The segmentation matching method, hidden Markov model and shortest path algorithm are combined to improve the matching accuracy and matching efficiency;
- (3)
- Experiments are performed using real trajectory datasets and Shanghai road network data, and the results show that the proposed vehicle direction segmentation-based map matching algorithm achieves higher accuracy and requires less running time. In particular, the proposed method shortens the running time by almost 10−20%, and the matching accuracy is improved by almost 5%. Simultaneously, it has good adaptability under the parallel road topology.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kiani, A.; Liu, G.; Shi, H.; Khreishah, A.; Ansari, N.; Lee, J.Y.; Liu, C. A two-tier edge computing based model for advanced traffic detection. In Proceedings of the 5th International Conference on Internet of Things: Systems, Management and Security, Valencia, Spain, 15–18 October 2018; pp. 208–215. [Google Scholar]
- Wali, B.; Khattak, A.J.; Bozdogan, H.; Kamrani, M. How is driving volatility related to intersection safety? A Bayesian heterogeneity-based analysis of instrumented vehicles data. Transp. Res. Part C Emerg. Technol. 2018, 92, 504–524. [Google Scholar] [CrossRef]
- Azimjonov, J.; Özmen, A. A real-time vehicle detection and a novel vehicle tracking systems for estimating and monitoring traffic flow on highways. Adv. Eng. Inform. 2021, 50, 101393. [Google Scholar] [CrossRef]
- Tang, J.; Bi, W.; Liu, F.; Zhang, W. Exploring urban travel patterns using density-based clustering with multi-attributes from large-scaled vehicle trajectories. Phys. A Stat. Mech. Its Appl. 2021, 561, 125301. [Google Scholar] [CrossRef]
- Dandala, T.T.; Krishnamurthy, V.; Alwan, R. Internet of Vehicles (IoV) for traffic management. In Proceedings of the 2017 International Conference on Computer, Communication and Signal Processing, Chennai, India, 10–11 January 2017; pp. 1–4. [Google Scholar]
- Lee, H.Y.; Ho, H.W.; Zhou, Y. Deep learning-based monocular obstacle avoidance for unmanned aerial vehicle navigation in tree plantations. J. Intell. Robot. Syst. 2021, 101, 5. [Google Scholar] [CrossRef]
- Velaga, N.R.; Quddus, M.A.; Bristow, A.L. Developing an enhanced weight-based topological map-matching algorithm for intelligent transport systems. Transp. Res. Part C Emerg. Technol. 2009, 17, 672–683. [Google Scholar] [CrossRef] [Green Version]
- Toledo-Moreo, R.; Bétaille, D.; Peyret, F. Lane-level integrity provision for navigation and map matching with GNSS, dead reckoning, and enhanced maps. IEEE Trans. Intell. Transp. Syst. 2009, 11, 100–112. [Google Scholar] [CrossRef]
- Szottka, I. Particle filtering for lane-level map-matching at road bifurcations. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems, Hague, The Netherlands, 6–9 October 2013; pp. 154–159. [Google Scholar]
- Tao, Z.; Bonnifait, P.; Fremont, V.; Ibanez-Guzman, J. Lane marking aided vehicle localization. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems, Hague, The Netherlands, 6–9 October 2013; pp. 1509–1515. [Google Scholar]
- Gu, Y.; Wada, Y.; Hsu, L.; Kamijo, S. Vehicle self-localization in urban canyon using 3D map based GPS positioning and vehicle sensors. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo, Vienna, Austria, 3–7 November 2014; pp. 792–798. [Google Scholar]
- Shunsuke, K.; Yanlei, G.; Hsu, L.T. GNSS/INS/on-board camera integration for vehicle self-localization in urban canyon. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2533–2538. [Google Scholar]
- Zheng, Y.; Hansen, J.H.L. Lane-change detection from steering signal using spectral segmentation and learning-based classification. IEEE Trans. Intell. Veh. 2017, 2, 14–24. [Google Scholar] [CrossRef]
- Kassas, Z.Z.M.; Maaref, M.; Morales, J.J.; Khalife, J.J.; Shamei, K. Robust vehicular localization and map matching in urban environments through IMU, GNSS, and cellular signals. IEEE Intell. Transp. Syst. Mag. 2020, 12, 36–52. [Google Scholar] [CrossRef]
- Maaref, M.; Kassas, Z.M. Ground vehicle navigation in GNSS-challenged environments using signals of opportunity and a closed-loop map-matching approach. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2723–2738. [Google Scholar] [CrossRef] [Green Version]
- Newson, P.; Krumm, J. Hidden Markov map matching through noise and sparseness. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009; pp. 336–343. [Google Scholar]
- Zeng, Z.; Zhang, T.; Li, Q.; Wu, Z.; Zou, H.; Gao, C. Curvedness feature constrained map matching for low-frequency probe vehicle data. Int. J. Geogr. Inf. Sci. 2016, 30, 660–690. [Google Scholar] [CrossRef]
- Luo, A.; Chen, S.; Xv, B. Enhanced map-matching algorithm with a hidden Markov model for mobile phone positioning. ISPRS Int. J. Geo-Inf. 2017, 6, 327. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Ding, Y.; Xie, X.; Zhang, S. A three-stage online map-matching algorithm by fully using vehicle heading direction. J. Ambient. Intell. Humaniz. Comput. 2018, 9, 1623–1633. [Google Scholar] [CrossRef]
- Lin, M.C.-H.; Huang, F.-M.; Liu, P.-C.; Huang, Y.-H.; Chung, Y.-S. Dijkstra-Based Selection for Parallel Multi-lanes Map-Matching and an Actual Path Tagging System. In Proceedings of the Asian Conference on Intelligent Information and Database Systems, Da Nang, Vietnam, 14–16 March 2016; pp. 499–508. [Google Scholar]
- Ptošek, V.; Rapant, L.; Martinovič, J. Floating car data map-matching utilizing the Dijkstra’s algorithm. In Data Management, Analytics and Innovation; Springer: Singapore, 2020; pp. 115–130. [Google Scholar]
- Koller, H.; Widhalm, P.; Dragaschnig, M.; Graser, A. Fast hidden Markov model map-matching for sparse and noisy trajectories. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2557–2561. [Google Scholar]
- Lou, Y.; Zhang, C.; Zheng, Y.; Xie, X.; Wang, W.; Huang, Y. Map-matching for low-sampling-rate GPS trajectories. In Proceedings of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 4–6 November 2009; pp. 352–361. [Google Scholar]
- Karduni, A.; Kermanshah, A.; Derrible, S. A protocol to convert spatial polyline data to network formats and applications to world urban road networks. Sci. Data 2016, 3, 160046. [Google Scholar] [CrossRef]
- Nikolić, M.; Jović, J. Implementation of generic algorithm in map-matching model. Expert Syst. Appl. 2017, 72, 283–292. [Google Scholar] [CrossRef]
- Yu, J.; Yang, Q.; Lu, J.; Han, J.; Peng, H. Advanced Map Matching Algorithms: A Survey and Trends. Acta Electron. Sin. 2021, 49, 1818–1829. [Google Scholar]
- Huang, Z.; Qiao, S.; Han, N.; Yuan, C.A.; Song, X.; Xiao, Y. Survey on vehicle map matching techniques. CAAI Trans. Intell. Technol. 2021, 6, 55–71. [Google Scholar] [CrossRef]
- Chao, P.; Xu, Y.; Hua, W.; Zhou, X. A survey on map-matching algorithms. In Proceedings of the Australasian Database Conference, Melbourne, VIC, Australia, 3–7 February 2020; Springer: Cham, Switzerland, 2020; pp. 121–133. [Google Scholar]
- Yu, Q.; Hu, F.; Ye, Z.; Chen, C.; Sun, L.; Luo, Y. High-frequency trajectory map matching algorithm based on road network topology. IEEE Trans. Intell. Transp. Syst. 2022, 3, 1–16. [Google Scholar] [CrossRef]
- Hsueh, Y.L.; Chen, H.C. Map matching for low-sampling-rate GPS trajectories by exploring real-time moving directions. Inf. Sci. 2018, 433, 55–69. [Google Scholar] [CrossRef]
- Tanaka, A.; Tateiwa, N.; Hata, N.; Yoshida, A.; Wakamatsu, T.; Osafune, S.; Fujisawa, K. Offline map matching using time-expanded graph for low-frequency data. Transp. Res. Part C Emerg. Technol. 2021, 130, 103265. [Google Scholar] [CrossRef]
- Chen, R.; Yuan, S.; Ma, C.; Zhao, H.; Feng, Z.-Y. THMM: A tailored hidden markov model optimized for cellular-based map matching. IEEE Trans. Ind. Electron. 2021, 12, 1–10. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | Comprehensive Probability Ranking of the Candidate Road Segment | |
|---|---|---|
| Corresponding to the Start Point | Corresponding to the End Point | |
| 1 | 1 | 1 |
| 2 | 1 | 2 |
| 3 | 2 | 1 |
| 4 | 2 | 2 |
| 5 | 1 | 3 |
| Sampling Interval (s) | Number of GPS Points | Average Distance (m) |
|---|---|---|
| 15 | 110,972 | 377.81 |
| 30 | 60,575 | 631.01 |
| 60 | 59,941 | 964.72 |
| 90 | 39,220 | 1721.07 |
| 120 | 16,970 | 2295.23 |
| Sampling Interval (s) | k | (%) | (%) | (s) |
|---|---|---|---|---|
| 30 | 1 | 86.95 | 88.41 | 0.369709 |
| 2 | 89.86 | 92.31 | 0.370341 | |
| 3 | 89.86 | 92.31 | 0.371870 | |
| 4 | 92.75 | 94.87 | 0.375194 | |
| 5 | 92.75 | 94.87 | 0.377814 | |
| 60 | 1 | 83.30 | 85.9 | 0.598502 |
| 2 | 88.09 | 91.03 | 0.633812 | |
| 3 | 92.85 | 91.03 | 0.617812 | |
| 4 | 92.85 | 91.03 | 0.609079 | |
| 5 | 92.85 | 91.03 | 0.621662 | |
| 120 | 1 | 68.26 | 70.06 | 0.952200 |
| 2 | 73.23 | 73.21 | 0.962600 | |
| 3 | 73.23 | 73.21 | 0.996057 | |
| 4 | 73.23 | 73.21 | 1.014783 | |
| 5 | 78.26 | 78.20 | 1.027100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Q.; Hu, F.; Chen, C.; Sun, L.; Zheng, X. Low-Frequency Trajectory Map Matching Method Based on Vehicle Heading Segmentation. ISPRS Int. J. Geo-Inf. 2022, 11, 355. https://doi.org/10.3390/ijgi11070355
Yu Q, Hu F, Chen C, Sun L, Zheng X. Low-Frequency Trajectory Map Matching Method Based on Vehicle Heading Segmentation. ISPRS International Journal of Geo-Information. 2022; 11(7):355. https://doi.org/10.3390/ijgi11070355
Chicago/Turabian StyleYu, Qingying, Fan Hu, Chuanming Chen, Liping Sun, and Xiaoyao Zheng. 2022. "Low-Frequency Trajectory Map Matching Method Based on Vehicle Heading Segmentation" ISPRS International Journal of Geo-Information 11, no. 7: 355. https://doi.org/10.3390/ijgi11070355
APA StyleYu, Q., Hu, F., Chen, C., Sun, L., & Zheng, X. (2022). Low-Frequency Trajectory Map Matching Method Based on Vehicle Heading Segmentation. ISPRS International Journal of Geo-Information, 11(7), 355. https://doi.org/10.3390/ijgi11070355