
A Fine-Grain Batching-Based Task Allocation Algorithm for Spatial Crowdsourcing



Abstract
:1. Introduction
- We propose a fine-grained batching-based task allocation algorithm (FGBTA) for the online allocation problem in batch mode (OAPB) to achieve precise batching and improve allocation efficiency;
- We introduce the non-stationary setting to consider the dynamic changes of the environment and use two concept drifts (a phenomenon that a target variable changes over time) to verify the effectiveness of the algorithm in experiments;
- We verify the effectiveness and efficiency of the algorithm on synthetic data and real data. Experimental results show that our method is superior to the compared methods in terms of overall utility and waiting time.
2. Related Work
2.1. Crowdsourcing and Geographic Information Crowdsourcing
2.2. Online Allocation in Batch Mode
2.3. Multi-Armed Bandit (MAB)
3. Problem Statement
3.1. SC Allocation-Related Definitions
- represents the time stamp when he appears ongeographic coordinates. Considering that, in practical applications, workers (such as taxi drivers) tend to move dynamically and that their geographical coordinates are constantly changing, we assume that, if a worker is not assigned a suitable task within a certain period, the worker needs to update his geographical locationand the corresponding appearance time, and then appear on the platform as a new worker, that is,disappears andappears.
- indicates the speed at which workers move to the task location.
- andrespectively represent the latitude and longitude of workers’ geographical position at.
- means that crowdsourcing workers are near the geographic coordinate ofin the period, and they can still use this coordinate to express their geographic position. It is worth noting that, if crowdsourcing workers cannot find a suitable task to match during, they will re-participate in the platform matching process at a new time stamp and a new location.
- represents the acceptable order radius for crowdsourcing workers. If the order distance exceeds the acceptable radius, we think that the task position is too far away, and reckless dispatch will greatly reduce the experience of both sides.
- represents the release timestamp of the task, that is, the time when the task arrives at the server.
- andrepresent the latitude and longitude of the geographical location of the task, respectively.
- indicates the duration of the task, andis the expiration time stamp of the task.
- represents the specific description of the spatial task. In the application of taxi order dispatch, its specific description is mainly composed of the customer’s destination, namely, whererepresents the latitude of the task destination andrepresents the longitude of the task destination.
3.2. Problem Definitions
- the waiting time of user:
- the reward of order:
- the success rate of matching:
- Wait time normalization function:
- Order reward normalization function:
- Success rate of matching normalization function:
4. Fine-Grained Batching-Based Task Allocation Algorithm (FGBTA)
4.1. Basic Idea
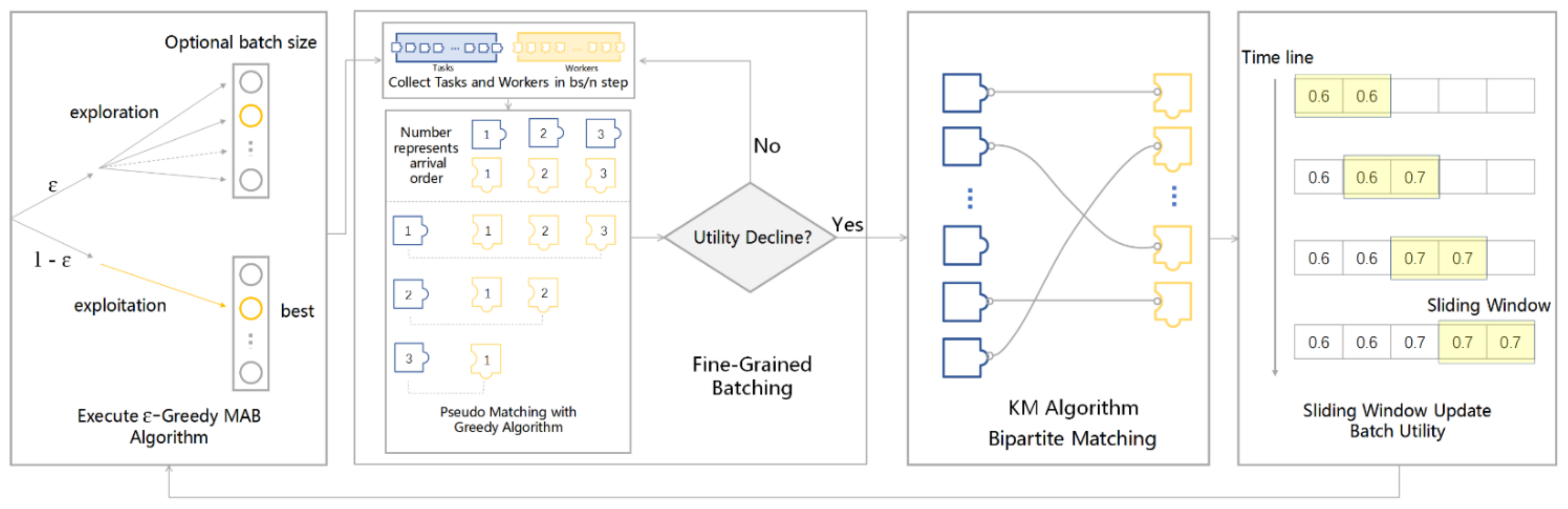
- Execute ϵ-greedy MAB algorithm: the algorithm explores the optional batch size with a probability of ϵ, and utilizes the optimal batch size with a probability of 1-ϵ. The gray rectangular box in the ϵ-greedy MAB algorithm box represents the list of stored optional batch size; the circle represents optional batch size and the yellow circle represents the optimal batch size. The algorithm returns a batch size as the input of the next algorithm.
- Execute the fine-grained batching algorithm:
- The first step is to divide the obtained batch size into parts.
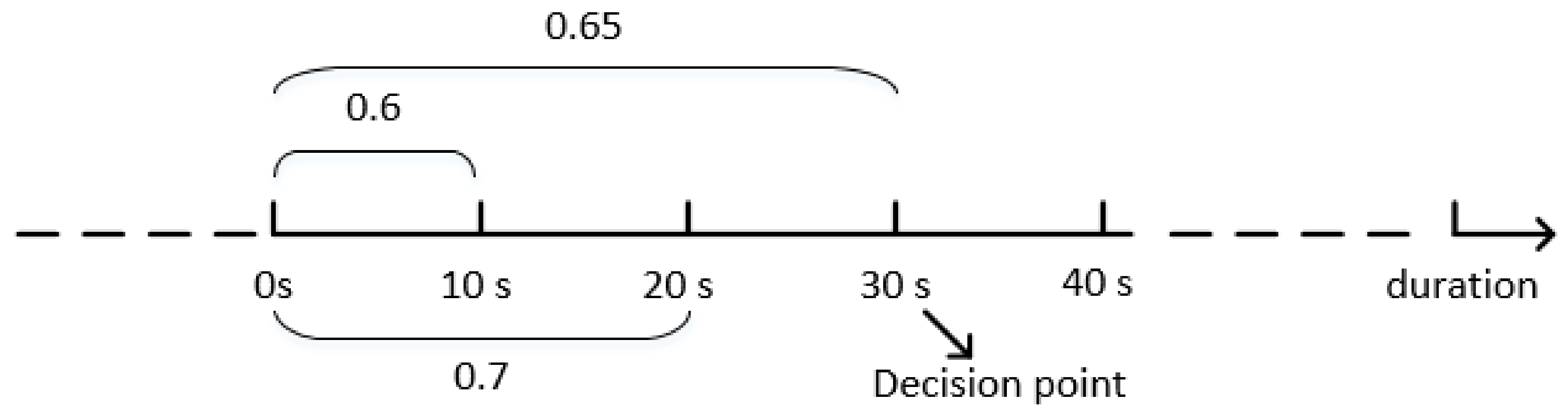
- The second step, every time through this step, the algorithm will wait seconds for new spatial tasks and crowdsourcing workers to enter. The small box in the upper left corner of the fine-grained batching box expresses this process. Each blue puzzle piece in the left queue represents a spatial task, and each yellow puzzle piece in the right queue represents a crowdsourcing worker.
- The third step is to use greedy algorithm to perform pseudo-matching and calculate utility. In the pseudo-matching process, we use the first-come-first-served principle to find suitable crowdsourcing workers for tasks. The box in the lower left corner of the fine-grained batching box expresses this process. The upper part of the box represents the existing tasks and workers, and the sequence numbers in the puzzle pieces represent the order in which they arrive at the platform. The lower part shows the algorithm-matching process. Task 1 arrives first, chooses first, and chooses crowdsourcing worker 3. Then, there are still two choices for task 2 and it chooses crowdsourcing worker 2. Finally, there is only crowdsourcing worker 1 available for task 3, and it can only choose crowdsourcing worker 1.
- The fourth step, if the calculated batch utility does not decrease, which means that more tasks and crowdsourcing workers can be stored in the batch, returns to the second step. If the utility of the batch declines, more crowdsourcing data cannot be stored in the batch and the next algorithm is entered. This process is expressed in the judgment box on the right side of the fine-grained batching box, which is used to judge whether the batch utility is declining. If not, return to the second step; otherwise, enter the next algorithm.
- Execute KM algorithm: Execute KM algorithm: This is a process of bipartite matching. The blue puzzle pieces on the left in the KM box represent the existing spatial tasks, and the yellow puzzle pieces on the right represent the existing crowdsourcing workers. One less piece of the puzzle on the right is used to show that the number of left and right nodes in the real task allocation scene is often unequal.
- Execute SW algorithm to update batch utility: For a non-stationary environment, the SW method retains short-term utility scores of batches to eliminate adverse effects caused by historical utility. The timeline on the left in SW represents the passage of time. As time goes on, new utility is input into the queue; the yellow moving box represents the sliding window and the length of the moving box represents the length of the sliding window. Sliding the window to the right means receiving newer recent data.
4.2. Fine-Grained Batching Algorithm
| Algorithm 1 Pseudo Matching with Greedy Algorithm |
| Input: a set of tasks order by timestamp, a set of workers Output: batch size utility value 1: initial in-batch match set ; 2: for in : 3: find a worker to maximize the utility score from 4: delete from 5: 6: calculate batch size utility value with match set ; 7: return ; |
4.3. Using Sliding Window (SW) Approach to Deal with Non-Stationary Setting
| Algorithm 2 Fine-Grained Batching-based Task Allocation Algorithm Considering Non-Stationary Setting |
| Input: a set of tasks, a set of workers, the timestamp set , exploration rate , adjustable parameter , Output: the batch size selection trace of the entire data stream 1: Initialize exploration rate , empty tasks set , empty workers set , batch size = 0, optional batch set ; 2: Initialize hot trace in each optional size to record recent batch size utility value, matches set ; 3: while incoming timestamp do: 4: if then: 5: exploration: ; 6: else 7: find the optimal batch size with the average value of hot trace ; 8: exploitation: ; 9: end 10: interval set: ; 11: initialize , ; 12: for interval in : 13: collect tasks and workers from ; 14: execute algorithm 1 and get batch size utility value with formula (7) and (8); 15: if : 16: 17: break; 18: else: 19: ; 20: end 21: for incoming tasks and incoming workers in do: 22: collect tasks and workers: ; 23: execute task assignment algorithm and , ; 24: find a batch size which closest to the step; 25: get batch size utility value with formula (7) and (8); 26: 27: if : 28: delete the first element of 29: end 30: ; |
5. Experimental Study
5.1. Experimental Setup
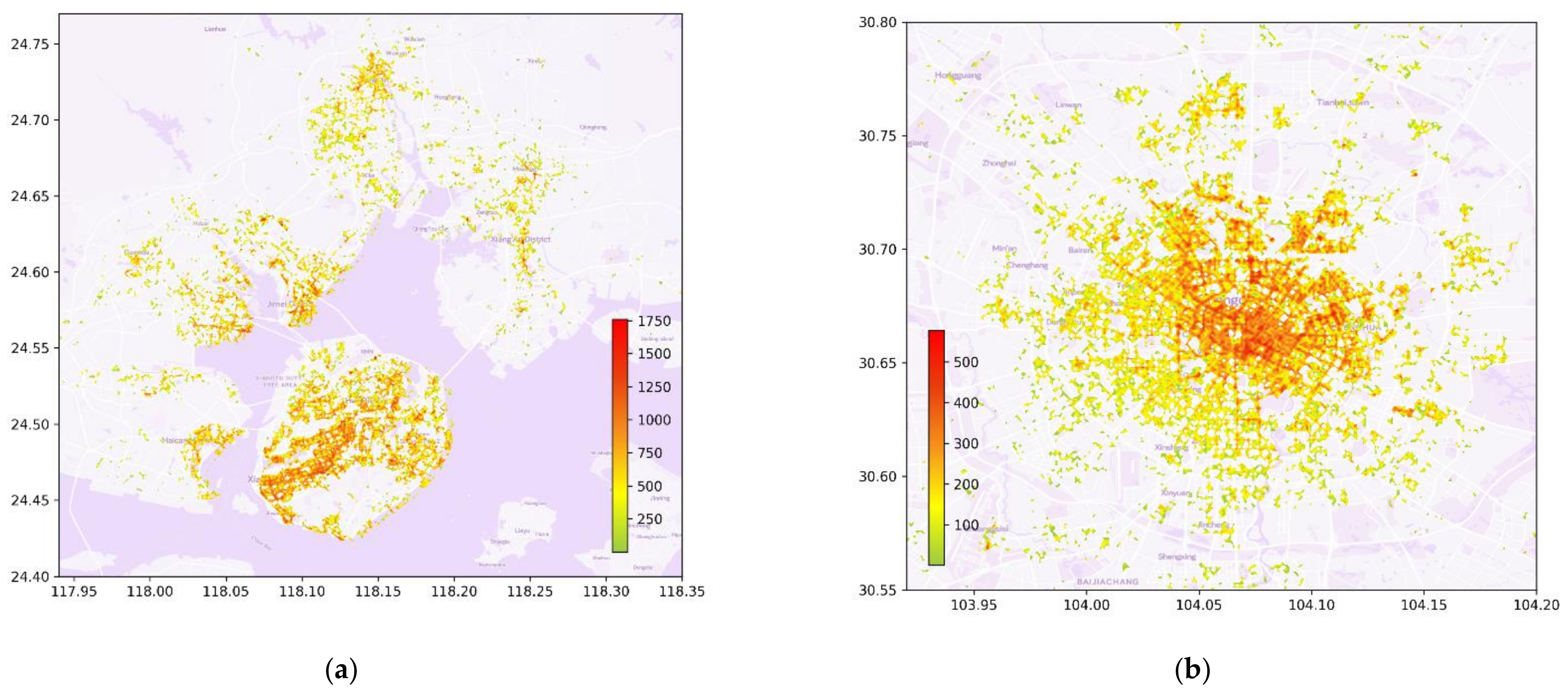
- Desensitized online car-hailing order data came from Xiamen Big Data Security Open and Innovative Application Competition [71]. The time span is from 31 May 2019 to 9 June 2019, and the spatial range is from latitude 24.2° to 24.8°, longitude 117.7° to 118.7°, with a total data of 3,027,488 pieces. According to the order data of online car-hailing in Xiamen on 1 June 2019, we drew the heat map of order distribution. The redder the color in the legend, the larger the number, indicating the higher the order density. The heat map is shown in Figure 3a.
- Desensitized taxi order data came from the Gaia Data Opening plan [72]. The time range is from 1 November 2016 to 30 November 2016. The space range is from latitude 30.571532° to 30.791919° and longitude 103.938215° to 104.21534°. The total data amount is 6844253. According to the order data of taxis in Chengdu on 1 November 2016, we drew a heat map of order distribution, in which the redder the color in the legend, the larger the number, which means the higher the order density. The heat map is shown in Figure 3b. It is worth noting that the two figures use a different maximum density and minimum density, therefore the same color does not mean the same order density. It is difficult to distinguish online car-hailing order or cruise order from taxi order attributes, so we handled taxi orders in the same way, whether they are online car-hailing orders or not, because there was no more attribute information to help us distinguish whether it was a cruise order or not.
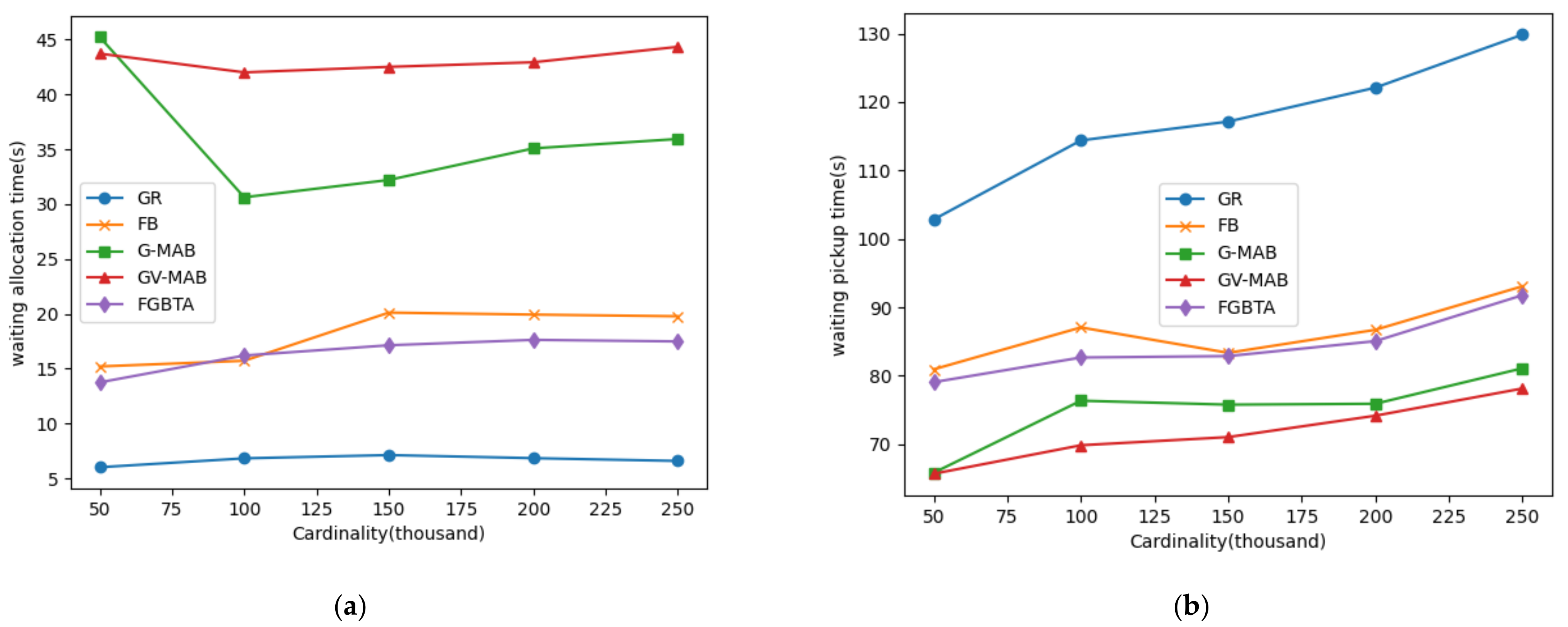
- Greedy algorithm (GR). This algorithm is slightly different from Algorithm 1 in this paper. It is a simple real-time algorithm that selects the most effective match for spatial tasks or crowdsourcing workers without batching. In an average order case, it is a competitive algorithm.
- Fixed-batch algorithm (FB). The batch size of the algorithm is a fixed value. In the non-stationary environment, the optimal fixed batch size will change with the arrival of new inputs. Therefore, we test the optimal batch size for each experiment. In-batch matching uses KM algorithm.
- ϵ-greedy MAB algorithm(G-MAB). The algorithm uses the ϵ-greedy strategy to balance exploration and exploitation, combined with the MAB algorithm, to select the appropriate batch for the input stream over time in order to obtain as much profit as possible.
- ϵ-greedy MAB with variable exploration (GV-MAB). This algorithm dynamically adjusts the exploration rate on the basis of the previous algorithm, which can improve the efficiency of the dynamic task allocation on the whole and shows good compatibility [24].
5.2. Experimental Results
5.2.1. Performance of the Algorithm on Synthetic Data Sets
Impact of Concept Drift
Impact of Duration
Impact of Radius
Impact of Exploration Rate and Adjustable Parameter
5.2.2. Performance of the Algorithm on Real Data Sets
6. Discussion
- In the research of [21], the ride-hailing platform can use the learned strategy structure as a look-up table to adaptively decide when to use the delay matching strategy and how long these matching delays should be. Offline information is a learned strategy structure.
- In the research of [46], this paper designed restricted Q-learning (RQL), which is an algorithm based on reinforcement learning and can produce a near-optimal batch processing strategy. Offline information is a batch processing strategy stored in Q table.
- In the research of [47], a method combining deep learning and reinforcement learning was proposed. By considering the historical data, the GRU model is trained to predict the number of future tasks. The Hungarian algorithm was adopted in batches. Offline knowledge is the predicted number of future tasks.
- In the research of [48], aiming at the online bottleneck matching problem with delay, the author proposes an adaptive holding strategy which is based on reinforcement learning and developed a method called adaptive-h on top of the new holding strategy. Offline knowledge is the holding strategy that has been learned well.
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tong, Y.X.; Zhou, Z.M.; Zeng, Y.X.; Chen, L.; Shahabi, C. Spatial crowdsourcing: A survey. VLDB J. 2020, 29, 217–250. [Google Scholar] [CrossRef]
- Abdullah, N.A.; Rahman, M.M.; Rahman, M.M.; Ghauth, K.I. A Framework for Optimal Worker Selection in Spatial Crowdsourcing Using Bayesian Network. IEEE Access 2020, 8, 120218–120233. [Google Scholar] [CrossRef]
- Aloufi, E.; Alharthi, R.; Zohdy, M.; Alsulami, D.; Alrashdi, I.; Olawoyin, R. An Efficient Approach for Task Assignment in Spatial Crowdsourcing. In Proceedings of the IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Vancouver, India, 12 September 2020; pp. 619–623. [Google Scholar]
- Bhatti, S.S.; Fan, J.H.; Wang, K.R.; Gao, X.F.; Wu, F.; Chen, G.H. An Approximation Algorithm for Bounded Task Assignment Problem in Spatial Crowdsourcing. IEEE. Trans. Mob. Comput. 2021, 20, 2536–2549. [Google Scholar] [CrossRef]
- Li, L.; Wang, L.L.; Lv, W.F. Real-time bottleneck matching in spatial crowdsourcing. Sci. China-Inf. Sci. 2021, 64, 2. [Google Scholar] [CrossRef]
- Li, Y.H.; Chang, L.; Li, L.; Bao, X.G.; Gu, T.L. TASC-MADM: Task Assignment in Spatial Crowdsourcing Based on Multiattribute Decision-Making. Secur. Commun. Netw. 2021, 2021, 14. [Google Scholar] [CrossRef]
- Ogbe, M.; Lujala, P. Spatial crowdsourcing in natural resource revenue management. Resour. Policy 2021, 72, 11. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Y.B.; Zhao, K.; Shi, W.; Lin, L.L.; Zhao, J.Z. Worker Collaborative group estimation in spatial crowdsourcing. Neurocomputing 2021, 428, 385–391. [Google Scholar] [CrossRef]
- Gummidi, S.R.B.; Xie, X.K.; Pedersen, T.B. A Survey of Spatial Crowdsourcing. ACM Trans. Database Syst. 2019, 44, 46. [Google Scholar] [CrossRef]
- Uber. Available online: https://www.uber.com/ (accessed on 20 December 2021).
- Waze. Available online: https://www.waze.com/ (accessed on 20 December 2021).
- GrubHub. Available online: https://www.grubhub.com/ (accessed on 20 December 2021).
- Gigwalk. Available online: https://www.gigwalk.com/ (accessed on 20 December 2021).
- Xu, Z.T.; Yin, Y.F.; Ye, J.P. On the supply curve of ride-hailing systems. Transp. Res. Part B-Methodol. 2020, 132, 29–43. [Google Scholar] [CrossRef]
- Song, T.H.; Xu, K.; Li, J.N.; Li, Y.M.; Tong, Y.X. Multi-skill aware task assignment in real-time spatial crowdsourcing. Geoinformatica 2020, 24, 153–173. [Google Scholar] [CrossRef]
- Cheng, Y.R.; Li, B.Y.; Zhou, X.M.; Yuan, Y.; Wang, G.R.; Chen, L. Real-Time Cross Online Matching in Spatial Crowdsourcing. In Proceedings of the IEEE 36th International Conference on Data Engineering (ICDE), Dallas, TX, USA, 20–24 April 2020; pp. 1–12. [Google Scholar]
- Kazemi, L.; Shahabi, C. Geocrowd: Enabling query answering with spatial crowdsourcing. In Proceedings of the 20th international conference on advances in geographic information systems, Redondo Beach, CA, USA, 6–9 November 2012; pp. 189–198. [Google Scholar]
- To, H.; Shahabi, C.; Kazemi, L. A Server-Assigned Spatial Crowdsourcing Framework. ACM Trans. Spat. Algorithms Syst. 2015, 1, 1–28. [Google Scholar] [CrossRef]
- Ke, J.; Xiao, F.; Yang, H.; Ye, J. Learning to delay in ride-sourcing systems: A multi-agent deep reinforcement learning framework. In IEEE Transactions on Knowledge and Data Engineering; IEEE: Piscataway Township, NJ, USA, 2020; p. 1. [Google Scholar] [CrossRef]
- Yang, H.; Qin, X.R.; Ke, J.T.; Ye, J.P. Optimizing matching time interval and matching radius in on-demand ride-sourcing markets. Transp. Res. Part B-Methodol. 2020, 131, 84–105. [Google Scholar] [CrossRef]
- Qin, G.Y.; Luo, Q.; Yin, Y.F.; Sun, J.; Ye, J.P. Optimizing matching time intervals for ride-hailing services using reinforcement learning. Transp. Res. Part C-Emerg. Technol. 2021, 129, 18. [Google Scholar] [CrossRef]
- Azar, Y.; Ganesh, A.; Ge, R.; Panigrahi, D. Online Service with Delay. ACM Trans. Algorithms 2021, 17, 31. [Google Scholar] [CrossRef]
- Ashlagi, I.; Burq, M.; Dutta, C.; Jaillet, P.; Saberi, A.; Sholley, C. Maximum weight online matching with deadlines. arXiv 2018, arXiv:1808.03526. [Google Scholar]
- Qian, L.; Liu, G.F.; Zhu, F.; Li, Z.X.; Wang, Y.; Liu, A. Enhancing User Experience of Task Assignment in Spatial Crowdsourcing: A Self-Adaptive Batching Approach. IEEE Access 2019, 7, 132324–132332. [Google Scholar] [CrossRef]
- Nevo, D.; Kotlarsky, J. Crowdsourcing as a strategic is sourcing phenomenon: Critical review and insights for future research. J. Strateg. Inf. Syst. 2020, 29, 101593. [Google Scholar] [CrossRef]
- Desai, A.; Warner, J.; Kuderer, N.; Thompson, M.; Painter, C.; Lyman, G.; Lopes, G.J.N.C. Crowdsourcing a crisis response for COVID-19 in oncology. Nat. Cancer 2020, 1, 473–476. [Google Scholar] [CrossRef]
- Pandey, S.R.; Tran, N.H.; Bennis, M.; Tun, Y.K.; Manzoor, A.; Hong, C.S. A crowdsourcing framework for on-device federated learning. IEEE Trans. Wirel. Commun. 2020, 19, 3241–3256. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Gao, Y.; Li, Y.; Tong, X.J.C.N. A worker-selection incentive mechanism for optimizing platform-centric mobile crowdsourcing systems. Computer Netw. 2020, 171, 107144. [Google Scholar] [CrossRef]
- Modaresnezhad, M.; Iyer, L.; Palvia, P.; Taras, V.J.I.P. Information Technology (IT) enabled crowdsourcing: A conceptual framework. Inf. Process. 2020, 57, 102135. [Google Scholar] [CrossRef]
- Howe, J. The rise of crowdsourcing. Wired Mag. 2006, 14, 1–4. [Google Scholar] [CrossRef]
- Bhatti, S.S.; Gao, X.; Chen, G.J.J.o.S. General framework, opportunities and challenges for crowdsourcing techniques: A Comprehensive survey. J. Syst. Softw. 2020, 167, 110611. [Google Scholar] [CrossRef]
- Moghadas, M.; Rajabifard, A.; Fekete, A.; Kötter, T. A Framework for Scaling Urban Transformative Resilience Through Utilizing Volunteered Geographic Information. ISPRS Int. J. Geo-Inf. 2022, 11, 114. [Google Scholar] [CrossRef]
- Herold, H.; Behnisch, M.; Hecht, R.; Leyk, S.J.I.I.J.o.G.-I. Geospatial Modeling Approaches to Historical Settlement and Landscape Analysis. ISPRS Int. J. Geo-Inf. 2022, 11, 75. [Google Scholar] [CrossRef]
- Hacar, M.J.I.I.J.o.G.-I. Analyzing the Behaviors of OpenStreetMap Volunteers in Mapping Building Polygons Using a Machine Learning Approach. ISPRS Int. J. Geo-Inf. 2022, 11, 70. [Google Scholar] [CrossRef]
- Cao, S.; Du, S.; Yang, S.; Du, S. Functional Classification of Urban Parks Based on Urban Functional Zone and Crowd-Sourced Geographical Data. ISPRS Int. J. Geo-Inf. 2021, 10, 824. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Glennon, J.A. Crowdsourcing geographic information for disaster response: A research frontier. Int. J. Digit. Earth 2010, 3, 231–241. [Google Scholar] [CrossRef]
- Elwood, S.; Goodchild, M.F.; Sui, D. Prospects for VGI research and the emerging fourth paradigm. In Crowdsourcing Geographic Knowledge; Springer: Berlin/Heidelberg, Germany, 2013; pp. 361–375. [Google Scholar]
- Li, W.; Batty, M.; Goodchild, M.F. Real-time GIS for smart cities. Int. J. Geogr. Inf. Sci. 2020, 34, 311–324. [Google Scholar] [CrossRef]
- Basiri, A.; Haklay, M.; Foody, G.; Mooney, P. Crowdsourced geospatial data quality: Challenges and future directions. Int. J. Geogr. Inf. Sci. 2019, 33, 1588–1593. [Google Scholar] [CrossRef] [Green Version]
- Haklay, M. Citizen science and volunteered geographic information: Overview and typology of participation. In Crowdsourcing Geographic Knowledge; Springer: Berlin/Heidelberg, Germany, 2013; pp. 105–122. [Google Scholar]
- Khajwal, A.B.; Noshadravan, A. An uncertainty-aware framework for reliable disaster damage assessment via crowdsourcing. Int. J. Disaster Risk Reduct. 2021, 55, 102110. [Google Scholar] [CrossRef]
- Vrbík, D.; Lábus, V. Crowdsourcing of Popular Toponyms: How to Collect and Preserve Toponyms in Spoken Use. Int. J. Geo-Inf. 2021, 10, 303. [Google Scholar] [CrossRef]
- Geo-Wiki. Available online: https://www.geo-wiki.org/ (accessed on 1 March 2022).
- Global Earthquake Model (GEM). Available online: https://www.globalquakemodel.org/ (accessed on 1 March 2022).
- ClickWorkers. Available online: http://www.nasaclickworkers.com/ (accessed on 1 March 2022).
- Wang, Y.S.; Tong, Y.X.; Long, C.; Xu, P.; Xu, K.; Lv, W.F. Adaptive Dynamic Bipartite Graph Matching: A Reinforcement Learning Approach. In Proceedings of the IEEE 35th International Conference on Data Engineering (ICDE), Macau, China, 8–11 April 2019; pp. 1478–1489. [Google Scholar]
- Sun, L.J.; Yu, X.J.; Guo, J.C.; Yan, Y.; Yu, X. Deep Reinforcement Learning for Task Assignment in Spatial Crowdsourcing and Sensing. IEEE Sens. J. 2021, 21, 25323–25330. [Google Scholar] [CrossRef]
- Wang, K.; Long, C.; Tong, Y.; Zhang, J.; Xu, Y. Adaptive Holding for Online Bottleneck Matching with Delays. In Proceedings of the Proceedings of the 2021 SIAM International Conference on Data Mining (SDM), Online, 29 April–1 May 2021; pp. 235–243. [Google Scholar]
- Manome, N.; Shinohara, S.; Suzuki, K.; Tomonaga, K.; Mitsuyoshi, S. A Multi-armed Bandit Algorithm Available in Stationary or Non-stationary Environments Using Self-organizing Maps. In Proceedings of the 28th International Conference on Artificial Neural Networks (ICANN), Munich, Germany, 17 September 2019; pp. 529–540. [Google Scholar]
- Rahman, A.U.; Ghatak, G.; De Domenico, A. An Online Algorithm for Computation Offloading in Non-Stationary Environments. IEEE Commun. Lett. 2020, 24, 2167–2171. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Qian, H.; Kang, K.; Jin, Y.L. Non-Stationary Bandit Strategy for Rate Adaptation With Delayed Feedback. IEEE Access 2020, 8, 75503–75511. [Google Scholar] [CrossRef]
- Xia, W.C.; Quek, T.Q.S.; Guo, K.; Wen, W.L.; Yang, H.H.; Zhu, H.B. Multi-Armed Bandit-Based Client Scheduling for Federated Learning. IEEE Trans. Wirel. Commun. 2020, 19, 7108–7123. [Google Scholar] [CrossRef]
- Liu, X.C.; Derakhshani, M.; Lambotharan, S.; van der Schaar, M. Risk-Aware Multi-Armed Bandits With Refined Upper Confidence Bounds. IEEE Signal Process. Lett. 2021, 28, 269–273. [Google Scholar] [CrossRef]
- Roy, K.; Zhang, Q.; Gaur, M.; Sheth, A. Knowledge Infused Policy Gradients with Upper Confidence Bound for Relational Bandits. In Proceedings of the European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases (ECML PKDD), Online, 13–17 September 2021; pp. 35–50. [Google Scholar]
- Radovic, N.; Erceg, M. Hardware implementation of the upper confidence-bound algorithm for reinforcement learning. Comput. Electr. Eng. 2021, 96, 9. [Google Scholar] [CrossRef]
- Vaswani, S.; Mehrabian, A.; Durand, A.; Kveton, B. Old Dog Learns New Tricks: Randomized UCB for Bandit Problems. In Proceedings of the 23rd International Conference on Artificial Intelligence and Statistics (AISTATS), Online, 26–28 August 2020. [Google Scholar]
- Thompson, W.R.J.B. On the likelihood that one unknown probability exceeds another in view of the evidence of two samples. Biometrika 1933, 25, 285–294. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Huang, L.S.; Xu, H.L. Collaborative Thompson Sampling. Mobile Netw. Appl. 2020, 25, 1351–1363. [Google Scholar] [CrossRef]
- Zhu, Z.Y.; Huang, L.S.; Xu, H.L. Self-accelerated Thompson sampling with near-optimal regret upper bound. Neurocomputing 2020, 399, 37–47. [Google Scholar] [CrossRef]
- Moradipari, A.; Alizadeh, M.; Thrampoulidis, C. Linear Thompson Sampling Under Unknown Linear Constraints. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Barcelona, Spain, 4–8 May 2020; pp. 3392–3396. [Google Scholar]
- Banjevic, D.; Kim, M.J. Thompson Sampling for Stochastic Control: The Continuous Parameter Case. IEEE Trans. Autom. Control 2019, 64, 4137–4152. [Google Scholar] [CrossRef]
- Cao, Y.; Wen, Z.; Kveton, B.; Xie, Y. Nearly Optimal Adaptive Procedure with Change Detection for Piecewise-Stationary Bandit. In Proceedings of the 22nd International Conference on Artificial Intelligence and Statistics (AISTATS), Naha, Japan, 16–18 April 2019; pp. 418–427. [Google Scholar]
- Trovo, F.; Paladino, S.; Restelli, M.; Gatti, N. Sliding-Window Thompson Sampling for Non-Stationary Settings. J. Artif. Intell. Res. 2020, 68, 311–364. [Google Scholar] [CrossRef]
- Cavenaghi, E.; Sottocornola, G.; Stella, F.; Zanker, M. Non Stationary Multi-Armed Bandit: Empirical Evaluation of a New Concept Drift-Aware Algorithm. Entropy 2021, 23, 380. [Google Scholar] [CrossRef]
- Galmeanu, H.; Andonie, R. Concept Drift Adaptation with Incremental-Decremental SVM. Appl. Sci. 2021, 11, 9644. [Google Scholar] [CrossRef]
- Zheng, X.L.; Li, P.P.; Hu, X.G.; Yu, K. Semi-supervised classification on data streams with recurring concept drift and concept evolution. Knowledge-Based Syst. 2021, 215, 16. [Google Scholar] [CrossRef]
- Halstead, B.; Koh, Y.S.; Riddle, P.; Pears, R.; Pechenizkiy, M.; Bifet, A.; Olivares, G.; Coulson, G. Analyzing and repairing concept drift adaptation in data stream classification. Mach. Learn. 2021, 1–35. [Google Scholar] [CrossRef]
- Wan, J.S.W.; Wang, S.D. Concept Drift Detection Based on Pre-Clustering and Statistical Testing. J. Internet Technol. 2021, 22, 465–472. [Google Scholar] [CrossRef]
- Goel, K.; Batra, S. Adaptive online learning for classification under concept drift. Int. J. Comput. Sci. Eng. 2021, 24, 128–135. [Google Scholar] [CrossRef]
- Mehmood, H.; Kostakos, P.; Cortes, M.; Anagnostopoulos, T.; Pirttikangas, S.; Gilman, E. Concept Drift Adaptation Techniques in Distributed Environment for Real-World Data Streams. Smart Cities 2021, 4, 349–371. [Google Scholar] [CrossRef]
- Xiamen Big Data Security Open Innovation Application Competition. Available online: https://data.xm.gov.cn/opendata-contest/#/ (accessed on 20 December 2021).
- Gaia Data Opening Plan. Available online: https://outreach.didichuxing.com/research/opendata/ (accessed on 20 December 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Mapping | Release Timestamp | Longitude of Task | Latitude of Task |
|---|---|---|---|
| properties from real data | pickup timestamp | pickup longitude | pickup latitude |
| required properties | release timestamp | longitude of the location | latitude of the location |
| Data Mapping | Appear Timestamp | Longitude of Worker | Latitude of Worker |
|---|---|---|---|
| properties from real data | getting off timestamp | getting off longitude | getting off latitude |
| required properties | appear timestamp | longitude of the location | latitude of the location |
| Cardinality | (Radius) | (Duration) | (Interval) | (Exploration Rate) | (Adjustable Parameter) | |
|---|---|---|---|---|---|---|
| 100 K | 5 KM | 180 s | 10 s | 2 | 0.6 | 0.01 |
| Cardinality | ||||||
|---|---|---|---|---|---|---|
| 100 K | 5 KM | 50 s, 100 s, 150 s, 200 s, 250 s | 10 s | 2 | 0.6 | 0.01 |
| Cardinality | ||||||
|---|---|---|---|---|---|---|
| 100 K | 2 KM, 3 KM, 4 KM, 5 KM, 6 KM | 180 s | 10 s | 2 | 0.6 | 0.01 |
| Cardinality | ||||||
|---|---|---|---|---|---|---|
| 100 K | 5 KM | 180 s | 10 s | 2 | [0.1–1.0] | 0.01 |
| Cardinality | ||||||
|---|---|---|---|---|---|---|
| 100 K | 5 KM | 180 s | 10 s | 2 | 0.6 | [0.00–0.05] |
| Cardinality | ||||||
|---|---|---|---|---|---|---|
| 50 K, 100 K, 150 K, 200 K, 250 K | 5 KM | 180 s | 10 s | 2 | 0.6 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, Y.; Lin, Z.; Yu, L.; Wu, X. A Fine-Grain Batching-Based Task Allocation Algorithm for Spatial Crowdsourcing. ISPRS Int. J. Geo-Inf. 2022, 11, 203. https://doi.org/10.3390/ijgi11030203
Jiao Y, Lin Z, Yu L, Wu X. A Fine-Grain Batching-Based Task Allocation Algorithm for Spatial Crowdsourcing. ISPRS International Journal of Geo-Information. 2022; 11(3):203. https://doi.org/10.3390/ijgi11030203
Chicago/Turabian StyleJiao, Yuxin, Zhikun Lin, Long Yu, and Xiaozhu Wu. 2022. "A Fine-Grain Batching-Based Task Allocation Algorithm for Spatial Crowdsourcing" ISPRS International Journal of Geo-Information 11, no. 3: 203. https://doi.org/10.3390/ijgi11030203
APA StyleJiao, Y., Lin, Z., Yu, L., & Wu, X. (2022). A Fine-Grain Batching-Based Task Allocation Algorithm for Spatial Crowdsourcing. ISPRS International Journal of Geo-Information, 11(3), 203. https://doi.org/10.3390/ijgi11030203