
Temperature Accuracy Analysis by Land Cover According to the Angle of the Thermal Infrared Imaging Camera for Unmanned Aerial Vehicles



Abstract
:1. Introduction
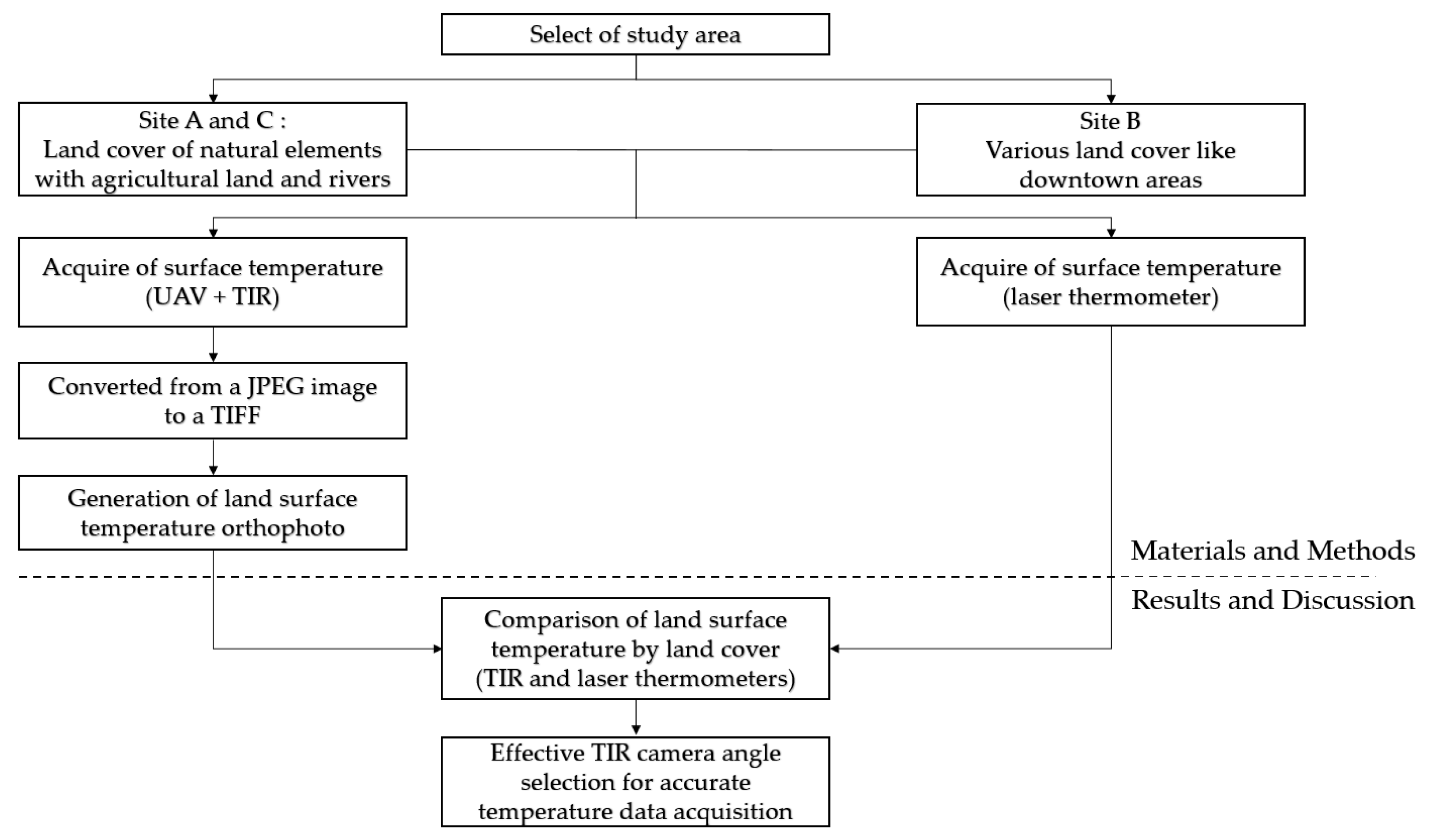
2. Materials and Methods
2.1. Study Equipment
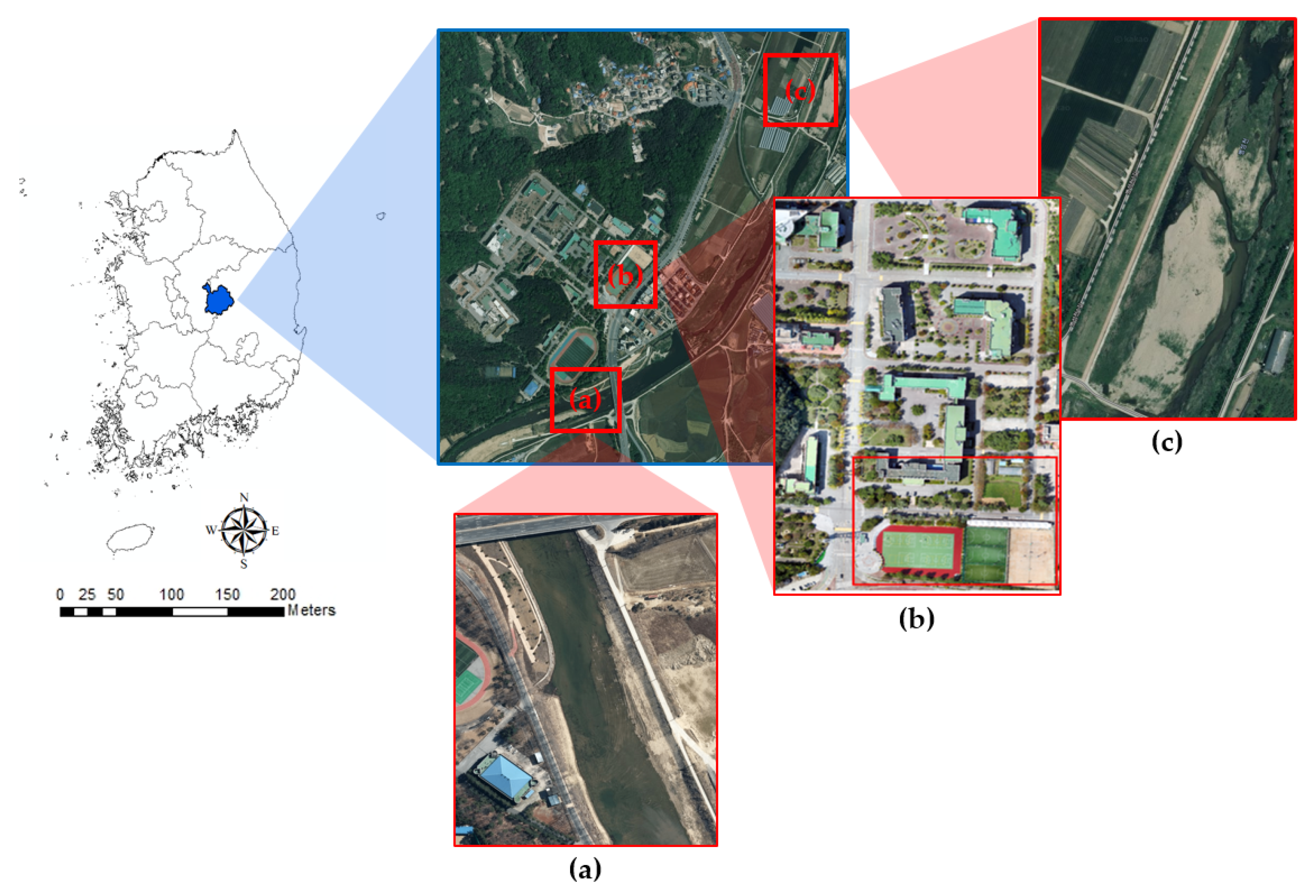
2.2. Study Area
2.3. Data Acquisition and Processing
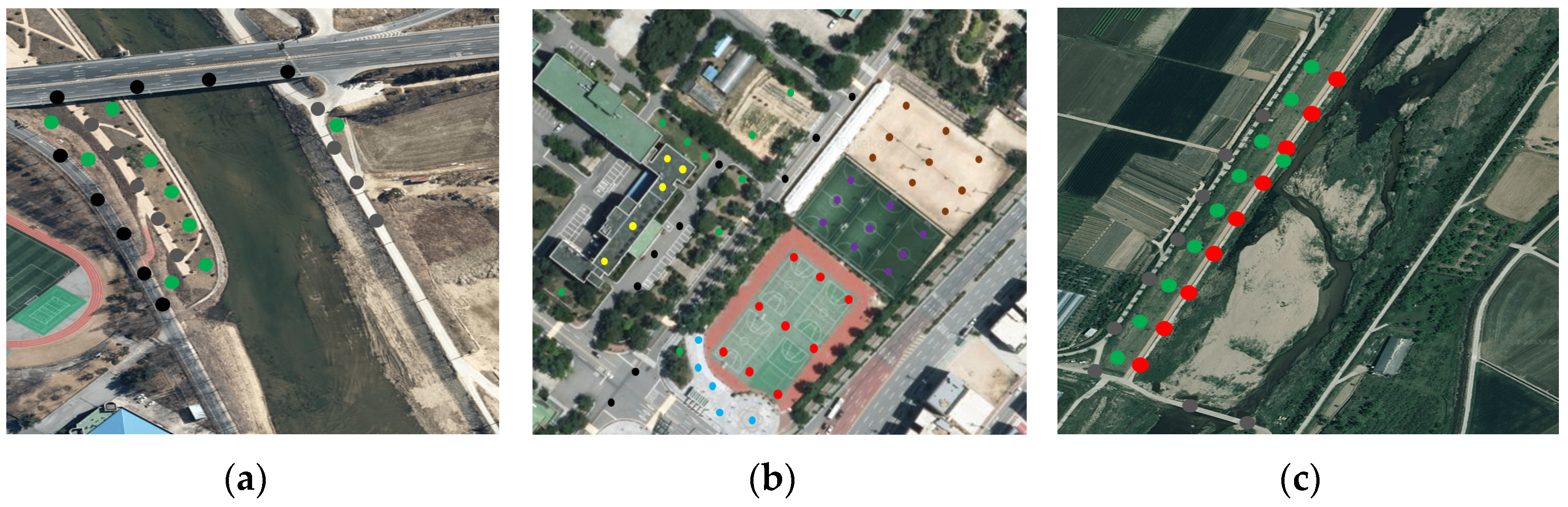
2.3.1. GPS Data Acquisition
2.3.2. Temperature Data Acquisition
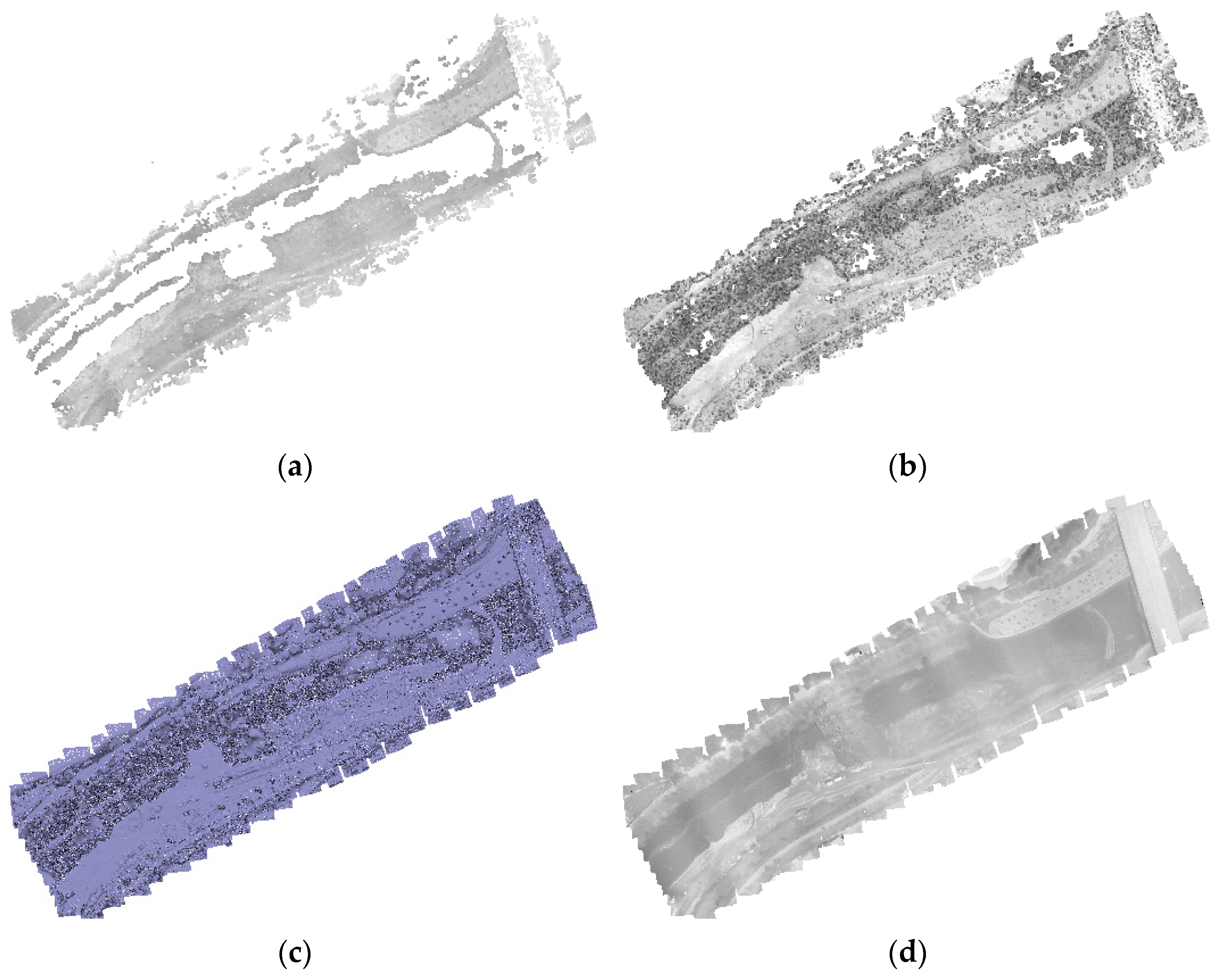
2.3.3. LST Orthophotos Generation
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Acharya, T.; Riehl, B.; Fuchs, A. Effects of albedo and thermal inertia on pavement surface temperatures with convective boundary conditions—A CFD Study. Processes 2021, 9, 2078. [Google Scholar] [CrossRef]
- Kim, S.W.; Brown, R.D. Urban heat island (UHI) intensity and magnitude estimations: A systematic literature review. Sci. Total Environ. 2021, 779, 146389. [Google Scholar] [CrossRef]
- Keppas, S.C.; Papadogiannaki, S.; Parliari, D.; Kontos, S.; Poupkou, A.; Tzoumaka, P.; Kelessis, A.; Zanis, P.; Casasanta, G.; de’Donato, F. Future climate change impact on urban heat island in two mediterranean cities based on high-resolution regional climate simulations. Atmosphere 2021, 12, 884. [Google Scholar] [CrossRef]
- Mohajerani, A.; Bakaric, J.; Jeffrey-Bailey, T. The urban heat island effect, its causes, and mitigation, with reference to the thermal properties of asphalt concrete. J. Environ. Manag. 2017, 197, 522–538. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Chen, X.; Dan, H.; Zhang, L. Combined prediction method for thermal conductivity of asphalt concrete based on meso-structure and renormalization technology. Appl. Sci. 2022, 12, 857. [Google Scholar] [CrossRef]
- Gao, Y.; Zhao, J.; Han, L. Exploring the spatial heterogeneity of urban heat island effect and its relationship to block morphology with the geographically weighted regression model. Sustain. Cities Soc. 2022, 76, 103431. [Google Scholar] [CrossRef]
- Abdullah, S.; Barua, D.; Abdullah, S.; Abubakar, M.; Rabby, Y.W. Investigating the impact of land use/land cover change on present and future land surface temperature (LST) of Chittagong, Bangladesh. Earth Syst. Environ. 2022, 6, 1–15. [Google Scholar] [CrossRef]
- Silvestri, M.; Marotta, E.; Buongiorno, M.F.; Avvisati, G.; Belviso, P.; Bellucci Sessa, E.; Caputo, T.; Longo, V.; De Leo, V.; Teggi, S. Monitoring of surface temperature on Parco delle Biancane (Italian Geo’ Area) using optical satellite data, UAV and field campaigns. Remote Sens. 2020, 12, 2018. [Google Scholar] [CrossRef]
- Çolak, E.; Sunar, F. Evaluation of forest fire risk in the Mediterranean Turkish forests: A case study of Menderes region, Izmir. Int. J. Disaster Risk Reduct. 2020, 45, 101479. [Google Scholar] [CrossRef]
- Khan, I.; Javed, T.; Khan, A.; Lei, H.; Muhammad, I.; Ali, I.; Huo, X. Impact assessment of land use change on surface temperature and agricultural productivity in Peshawar-Pakistan. Environ. Sci. Pollut. Res. 2019, 26, 33076–33085. [Google Scholar] [CrossRef]
- Park, J.H.; Lee, K.R.; Lee, W.H.; Han, Y.K. Generation of LST Orthophoto and Temperature Accuracy Analysis by Land Covers Based on Thermal Infrared Sensor Mounted on Unmanned Aerial Vehicle. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2018, 36, 263–270. [Google Scholar]
- Mokari, E.; Mohebzadeh, H.; Samani, Z.; DuBois, D.; Daggupati, P. Spatiotemporal imputation of MODIS land surface temperature using machine learning techniques (Case study: New Mexico’s Lower Rio Grande Valley). Remote Sens. Appl. Soc. Environ. 2021, 24, 100651. [Google Scholar] [CrossRef]
- Jiménez-Muñoz, J.C.; Sobrino, J.A.; Skoković, D.; Mattar, C.; Cristóbal, J. LST retrieval methods from Landsat-8 thermal infrared sensor data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1840–1843. [Google Scholar] [CrossRef]
- Liu, K.; Su, H.; Li, X.; Wang, W.; Yang, L.; Liang, H. Quantifying spatial–temporal pattern of urban heat island in Beijing: An improved assessment using LST (LST) time series observations from LANDSAT, MODIS, and Chinese new satellite GaoFen-1. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2028–2042. [Google Scholar] [CrossRef]
- Jin, Y.; Zhu, J.; Sung, S.; Lee, D.K. Application of satellite data spatiotemporal fusion in predicting seasonal NDVI. Korean J. Remote Sens. 2017, 33, 149–158. [Google Scholar]
- Wang, T.; Shi, J.; Ma, Y.; Husi, L.; Comyn-Platt, E.; Ji, D.; Zhao, T.; Xiong, C. Recovering LST under cloudy skies considering the solar-cloud-satellite geometry: Application to MODIS and Landsat-8 data. J. Geophys. Res. Atmos. 2019, 124, 3401–3416. [Google Scholar] [CrossRef]
- Cho, J.W.; Lee, J.K.; Park, J. Large-Scale Earthwork Progress Digitalization Practices Using Series of 3D Models Generated from UAS Images. Drones 2021, 5, 147. [Google Scholar] [CrossRef]
- Kelly, J.; Kljun, N.; Olsson, P.; Mihai, L.; Liljeblad, B.; Weslien, P.; Klemedtsson, L.; Eklundh, L. Challenges and best practices for deriving temperature data from an uncalibrated UAV thermal infrared camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef] [Green Version]
- Ortega-Farias, S.; Esteban-Condori, W.; Riveros-Burgos, C.; Fuentes-Peñailillo, F.; Bardeen, M. Evaluation of a two-source patch model to estimate vineyard energy balance using high-resolution thermal images acquired by an unmanned aerial vehicle (UAV). Agric. Meteorol. 2021, 304, 108433. [Google Scholar] [CrossRef]
- Lee, K.; Seong, J.; Han, Y.; Lee, W.H. Evaluation of Applicability of Various Color Space Techniques of UAV Images for Evaluating Cool Roof Performance. Energies 2020, 13, 4213. [Google Scholar] [CrossRef]
- Lee, K.; Park, J.; Jung, S.; Lee, W. Roof Color-Based Warm Roof Evaluation in Cold Regions Using a UAV Mounted Thermal Infrared Imaging Camera. Energies 2021, 14, 6488. [Google Scholar] [CrossRef]
- Neinavaz, E.; Schlerf, M.; Darvishzadeh, R.; Gerhards, M.; Skidmore, A.K. Thermal infrared remote sensing of vegetation: Current status and perspectives. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102415. [Google Scholar] [CrossRef]
- DJI Science and Technology Co., Ltd. Zenmuse XT Powered by FLIR User Manual v1.2, 05, Shenzhen, China. 2016. Available online: https://dl.djicdn.com/downloads/zenmuse_xt/en/Zenmuse_XT_User_Manual_V1.2_en_0708.pdf (accessed on 20 October 2021).
- Senzhen Everbest Machinery Industry Co., Ltd. Professional Infrared Thermometer DT-8868H, Shenzhen, China. 2010. Available online: https://www.cem-instruments.com/en/Product/detail/id/869dd (accessed on 28 October 2021).
- Trimble Inc. Trimble R8s GNSS Recever User Guide Version 1.0 Revision D, California, USA. 2020. Available online: https://trl.trimble.com/docushare/dsweb/Get/Document-740604/R8s%20UserGuide_RevD.pdf (accessed on 28 October 2021).
- Elsobeiey, M.E. Accuracy Assessment of Satellite-Based Correction Service and Virtual GNSS Reference Station for Hydrographic Surveying. J. Mar. Sci. Eng. 2020, 8, 542. [Google Scholar] [CrossRef]
- Mageed, K.M.A. Accuracy Evaluation between GPS Virtual Reference Station (VRS) and GPS Real Time Kinamatic (RTK) Techniques. World Appl. Sci. J. 2013, 24, 1154–1162. [Google Scholar]
- Wan, Q.; Brede, B.; Smigaj, M.; Kooistra, L. Factors Influencing Temperature Measurements from Miniaturized Thermal Infrared (TIR) Cameras: A Laboratory-Based Approach. Sensors 2021, 21, 8466. [Google Scholar] [CrossRef]
- Misopolinos, L.; Zalidis, C.H.; Liakopoulos, V.; Stavridou, D.; Katsigiannis, P.; Alexandridis, T.K.; Zalidis, G. Development of a UAV system for VNIR-TIR acquisitions in precision agriculture. In Proceedings of the 3rd International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2015), Paphos, Cyprus, 19 June 2015; Volume 9535, p. 95351H. [Google Scholar]
- Di Felice, F.; Mazzini, A.; Di Stefano, G.; Romeo, G. Drone high resolution infrared imaging of the Lusi mud eruption. Mar. Pet. Geol. 2018, 90, 38–51. [Google Scholar] [CrossRef]
- Urzędowski, A.; Wójcicka-Migasiuk, D.; Buraczyńska, B. Visual Effects of Surface Emissivity in Thermal Imaging. Adv. Sci. Technol. Res. J. 2020, 14, 215–222. [Google Scholar] [CrossRef]
- Fried, P.; Woodward, J.; Brown, D.; Harvell, D.; Hanken, J. 3D scanning of antique glass by combining photography and computed tomography. Digit. Appl. Archaeol. Cult. Herit. 2020, 18, e00147. [Google Scholar] [CrossRef]
- Lee, K.R.; Han, Y.K.; Lee, W.H. Comparison of orthophotos and 3D models generated by UAV-based oblique images taken in various angles. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2018, 36, 117–126. [Google Scholar]
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.d.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Aubrecht, D.M.; Helliker, B.R.; Goulden, M.L.; Roberts, D.A.; Still, C.J.; Richardson, A.D. Continuous, long-term, high-frequency thermal imaging of vegetation: Uncertainties and recommended best practices. Agric. Meteorol. 2016, 228, 315–326. [Google Scholar] [CrossRef] [Green Version]
- Kaushik, K.; Surana, S. An Offensive Approach for Hiding Malicious Payloads in an Image. In Proceedings of the Cyber Security and Digital Forensics (ICCSDF 2021), Haryana, India, 2 October 2021; pp. 265–272. [Google Scholar]
- Kao, D.; Chen, M.; Wu, W.; Lin, J.; Chen, C.; Tsai, F. Drone Forensic Investigation: DJI Spark Drone as A Case Study. Proc. Comput. Sci. 2019, 159, 1890–1899. [Google Scholar] [CrossRef]
- Prigent, C.; Rossow, W.B.; Matthews, E. Microwave land surface emissivities estimated from SSM/I observations. J. Geophys. Res. Atmos. 1997, 102, 21867–21890. [Google Scholar] [CrossRef]
- St, L.; Wold, S. Analysis of variance (ANOVA). Chemom. Intell. Lab. Syst. 1989, 6, 259–272. [Google Scholar]
- Yuksel, N.; Kanık, A.E.; Baykara, T. Comparison of in vitro dissolution profiles by ANOVA-based, model-dependent and-independent methods. Int. J. Pharm. 2000, 209, 57–67. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | TIR Camera | Laser Thermometer | |||
|---|---|---|---|---|---|
| Inspire 1 | Zenmuse XT630 | DT-8868H | |||
| Weight | 2935 g | Resolution | 640 × 512 | Temperature range | −50 °C~1650 °C (−58 °F–3002 °F) |
| Flight altitude | Max: 4500 m | Pixel size | 17μm | Temperature accuracy | ±1.0% of reading |
| Flight time | Max: 18 min | FOV | 45° × 37° | ||
| Speed | Max: 22 m/s | Focal length | 13 mm | ||
| Maximum wind resistance | 10 m/s | Scene range | −25 °C~+135 °C (High gain) −40 °C~+550 °C (Low gain) | ||
| Maximum Temperature (°C) | Minimum Temperature (°C) | Temperature at the Time of Shooting (°C) | Wind Speed at the Time of Shooting (m/s) | |
|---|---|---|---|---|
| 28 July 2021 | 33.5 | 22.7 | 31.8 | 1.0 |
| 29 July 2021 | 33.7 | 22.8 | 31.2 | 1.2 |
| 30 July 2021 | 34.5 | 24.2 | 31.6 | 1.1 |
| 4 August 2021 | 33.7 | 23.8 | 30.1 | 0.6 |
| 5 August 2021 | 34.4 | 24.2 | 31.8 | 1.4 |
| 6 August 2021 | 34.5 | 24.3 | 32.7 | 1.3 |
| 16 August 2021 | 27.8 | 20.7 | 26.9 | 1.3 |
| 17 August 2021 | 28.2 | 20.2 | 26.5 | 1.3 |
| 18 August 2021 | 28.5 | 19.8 | 27.2 | 1.5 |
| Average temperature in July 2021 (°C) | 26.2 | |||
| Average temperature in August 2021 (°C) | 24.4 | |||
| Parameter | Value | |
|---|---|---|
| TIR Sensor | PlanckR1 | 17096.453 |
| PlanckR2 | 0.046642166 | |
| PlanckB | 1428 | |
| PlanckF | 1 | |
| PlanckO | −342 | |
| Alpha 1 | 0.006569 | |
| Alpha 2 | 0.012620 | |
| Beta 1 | −0.002276 | |
| Beta 2 | −0.006670 | |
| X | 1.9 | |
| Environment | Dist | 50 m |
| RAT | 22 °C | |
| Hum | 50% | |
| AirT | 22 °C | |
| E | 0.95 |
| Land Cover (Total Number) | UAV & TIR | Laser Thermometer | Difference | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (a) | (b) | (c) | (a) | (b) | (c) | |||||||||||||
| 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | ||||
| Concrete (9) | 52.91 | 54.90 | 52.20 | 53.15 | 57.10 | 52.20 | 47.05 | 49.30 | 48.32 | 55.00 | 55.91 | 49.56 | 3.12 | 0.73 | 2.80 | 2.76 | 1.19 | 3.71 | 2.51 | 0.88 | 1.88 |
| Vegetation (9) | 39.04 | 38.14 | 38.37 | 39.35 | 39.28 | 39.46 | 35.31 | 35.34 | 35.13 | 38.16 | 39.53 | 35.26 | 1.08 | 0.52 | 0.60 | 0.67 | 0.36 | 0.62 | 1.11 | 0.48 | 0.90 |
| Asphalt (9) | 64.83 | 66.95 | 65.58 | 65.82 | 69.19 | 66.35 | 62.50 | 65.03 | 64.15 | 66.78 | 69.41 | 65.44 | 2.08 | 0.64 | 2.41 | 3.60 | 1.15 | 3.29 | 3.34 | 0.98 | 2.25 |
| Land Cover (Total Number) | UAV & TIR | Laser Thermometer | Difference | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (a) | (b) | (c) | (a) | (b) | (c) | |||||||||||||
| 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | ||||
| Urethane (9) | 57.52 | 63.38 | 67.80 | 68.52 | 65.23 | 65.38 | 56.98 | 60.91 | 61.82 | 63.81 | 65.10 | 61.33 | 6.29 | 1.44 | 3.98 | 3.42 | 0.72 | 2.32 | 4.35 | 0.85 | 2.14 |
| Artificial turf (9) | 66.25 | 63.08 | 64.50 | 65.95 | 70.08 | 69.29 | 60.46 | 62.94 | 62.64 | 61.97 | 69.84 | 63.51 | 4.28 | 1.20 | 2.54 | 3.89 | 1.07 | 1.24 | 3.06 | 1.04 | 2.24 |
| Soil (9) | 48.46 | 51.05 | 50.38 | 50.96 | 52.57 | 51.02 | 46.16 | 46.39 | 46.61 | 51.18 | 51.85 | 46.63 | 2.72 | 0.57 | 0.95 | 0.95 | 0.72 | 0.85 | 0.65 | 0.55 | 0.57 |
| Vegetation (9) | 40.86 | 41.04 | 41.36 | 41.67 | 41.77 | 42.26 | 39.68 | 40.09 | 40.28 | 42.17 | 41.81 | 40.36 | 1.52 | 1.58 | 1.45 | 1.15 | 0.85 | 1.14 | 0.71 | 0.84 | 0.48 |
| Marble (5) | 44.36 | 39.85 | 42.96 | 43.34 | 43.46 | 45.24 | 37.31 | 39.07 | 41.54 | 40.70 | 42.68 | 39.37 | 3.66 | 0.93 | 2.26 | 1.43 | 0.79 | 2.56 | 2.07 | 0.62 | 2.16 |
| Asphalt (9) | 69.55 | 74.34 | 71.02 | 72.19 | 76.66 | 74.00 | 64.45 | 70.79 | 69.29 | 74.59 | 76.40 | 70.52 | 5.05 | 0.67 | 3.58 | 4.20 | 0.88 | 2.40 | 6.07 | 0.88 | 1.35 |
| Green roof (5) | 61.22 | 62.03 | 62.65 | 64.12 | 64.76 | 64.84 | 58.91 | 59.56 | 60.34 | 61.02 | 64.79 | 61.01 | 0.70 | 1.01 | 2.06 | 0.84 | 0.37 | 0.57 | 2.11 | 1.45 | 0.74 |
| Land Cover (Total Number) | UAV & TIR | Laser Thermometer | Difference | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (a) | (b) | (c) | (a) | (b) | (c) | |||||||||||||
| 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | 70° | 80° | 90° | ||||
| Concrete (9) | 51.58 | 55.24 | 51.92 | 51.83 | 56.93 | 52.96 | 50.43 | 53.68 | 51.67 | 55.29 | 57.31 | 53.70 | 3.71 | 0.91 | 3.37 | 5.48 | 0.92 | 4.35 | 3.27 | 1.07 | 2.03 |
| Vegetation (9) | 38.18 | 38.35 | 37.77 | 41.15 | 40.86 | 40.99 | 37.19 | 37.50 | 37.28 | 37.91 | 40.50 | 37.39 | 0.63 | 0.59 | 0.42 | 0.80 | 0.65 | 0.91 | 0.75 | 0.57 | 0.49 |
| Urethane (9) | 56.20 | 60.97 | 59.07 | 58.19 | 63.73 | 61.43 | 61.80 | 57.15 | 58.80 | 61.97 | 62.99 | 57.67 | 5.77 | 1.11 | 2.90 | 4.79 | 1.51 | 2.06 | 4.13 | 0.75 | 1.13 |
| Groups | Count | Sum (°C) | Average (°C) | Variance (°C) | ||
| Concrete 70° | 27 | 1350.94 | 50.03 | 24.77 | ||
| Concrete 80° | 1451.76 | 53.77 | 15.08 | |||
| Concrete 90° | 1374.4 | 50.90 | 8.67 | |||
| Vegetation 70° | 1023.31 | 37.90 | 4.89 | |||
| Vegetation 80° | 1014.95 | 37.59 | 3.88 | |||
| Vegetation 90° | 1016.57 | 37.65 | 4.39 | |||
| Asphalt 70° | 1667.34 | 61.75 | 5.20 | |||
| Asphalt 80° | 1808.62 | 66.99 | 4.21 | |||
| Asphalt 90° | 1764.72 | 65.36 | 4.70 | |||
| Source of Variation | Sum of Squares (°C) | Degrees of Freedom | Mean of Squares (°C) | F-Value | p-Value | F-Critical Value |
| Between groups | 30,095.46 | 8 | 3761.93 | 446.75 | 4.2 × 10−137 | 1.98 |
| Within groups | 1970.44 | 234 | 8.42 | |||
| Total | 32,065.89 | 242 | ||||
| Groups | Count | Sum (°C) | Average (°C) | Variance (°C) | ||
| Urethane 70° | 27 | 1647.13 | 61.00 | 30.50 | ||
| Urethane 80° | 1705.65 | 63.17 | 5.39 | |||
| Urethane 90° | 1754.98 | 65.00 | 9.85 | |||
| Artificial turf 70° | 1733.87 | 64.22 | 8.09 | |||
| Artificial turf 80° | 1764.94 | 65.37 | 12.61 | |||
| Artificial turf 90° | 1767.95 | 65.48 | 10.19 | |||
| Soil 70° | 1310.20 | 48.53 | 4.53 | |||
| Soil 80° | 1350.14 | 50.01 | 7.98 | |||
| Soil 90° | 1332.12 | 49.34 | 4.64 | |||
| Vegetation 70° | 1099.98 | 40.74 | 1.63 | |||
| Vegetation 80° | 1106.06 | 40.97 | 1.11 | |||
| Vegetation 90° | 1115.06 | 41.30 | 1.16 | |||
| Asphalt 70° | 1855.73 | 68.73 | 11.30 | |||
| Asphalt 80° | 1996.07 | 73.93 | 6.88 | |||
| Asphalt 90° | 1928.79 | 71.44 | 4.57 | |||
| Marble 70° | 15 | 625.04 | 41.67 | 11.23 | ||
| Marble 80° | 611.93 | 40.80 | 4.15 | |||
| Marble 90° | 648.68 | 43.25 | 2.88 | |||
| Green roof 70° | 921.19 | 61.41 | 5.27 | |||
| Green roof 80° | 931.79 | 62.12 | 5.19 | |||
| Green roof 90° | 939.17 | 62.61 | 3.98 | |||
| Source of Variation | Sum of Squares (°C) | Degrees of Freedom | Mean of Squares (°C) | F-Value | p-Value | F-critical Value |
| Between groups | 62,540.46 | 20 | 3127.02 | 412.9998 | 5.9 × 10−285 | 1.59 |
| Within groups | 3588.89 | 474 | 7.57 | |||
| Total | 66,129.35 | 494 | ||||
| Groups | Count | Sum (°C) | Average (°C) | Variance (°C) | ||
| Concrete 70° | 27 | 1384.50 | 51.28 | 1.05 | ||
| Concrete 80° | 1492.65 | 55.28 | 2.43 | |||
| Concrete 90° | 1408.94 | 52.18 | 0.74 | |||
| Vegetation 70° | 1048.73 | 38.84 | 3.18 | |||
| Vegetation 80° | 1050.37 | 38.90 | 2.42 | |||
| Vegetation 90° | 1044.30 | 38.68 | 3.28 | |||
| Urethane 70° | 1585.77 | 58.73 | 6.28 | |||
| Urethane 80° | 1636.67 | 60.62 | 8.03 | |||
| Urethane 90° | 1613.71 | 59.77 | 1.97 | |||
| Source of Variation | Sum of Squares (°C) | Degrees of Freedom | Mean of Squares (°C) | F-Value | p-Value | F-Critical Value |
| Between groups | 18,697.48 | 8 | 2337.19 | 715.98 | 7.5 × 10−160 | 1.98 |
| Within groups | 763.85 | 234 | 3.26 | |||
| Total | 19,461.33 | 242 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Lee, W.H. Temperature Accuracy Analysis by Land Cover According to the Angle of the Thermal Infrared Imaging Camera for Unmanned Aerial Vehicles. ISPRS Int. J. Geo-Inf. 2022, 11, 204. https://doi.org/10.3390/ijgi11030204
Lee K, Lee WH. Temperature Accuracy Analysis by Land Cover According to the Angle of the Thermal Infrared Imaging Camera for Unmanned Aerial Vehicles. ISPRS International Journal of Geo-Information. 2022; 11(3):204. https://doi.org/10.3390/ijgi11030204
Chicago/Turabian StyleLee, Kirim, and Won Hee Lee. 2022. "Temperature Accuracy Analysis by Land Cover According to the Angle of the Thermal Infrared Imaging Camera for Unmanned Aerial Vehicles" ISPRS International Journal of Geo-Information 11, no. 3: 204. https://doi.org/10.3390/ijgi11030204
APA StyleLee, K., & Lee, W. H. (2022). Temperature Accuracy Analysis by Land Cover According to the Angle of the Thermal Infrared Imaging Camera for Unmanned Aerial Vehicles. ISPRS International Journal of Geo-Information, 11(3), 204. https://doi.org/10.3390/ijgi11030204