1. Introduction
With the fast development of Light Detection and Ranging (LiDAR) techniques and their successful application in three-dimensional data acquisition, point cloud registration has attracted significant attention for its role in the fusion of LiDAR point clouds from two neighboring stations. The essence of point cloud registration is to estimate the transformation parameters between the two neighboring stations, which is also known as spatial transformation. As is known, a spatial transformation can be explained as a rotation around the x, y, and z axes, a translation along the three axes, and a scale factor based on the centroid of the coordinate system.
Based on the different registration primitives used for the estimation of unknown transformation parameters, the available methods can be categorized into point feature-based methods [
1,
2], linear feature-based methods [
3,
4,
5], planar feature-based methods [
6,
7,
8], and hybrid feature-based methods [
9,
10,
11]. Until now, point features are still the most popular and widely used registration primitives for simple mathematical expressions. However, affected by the characteristics of LiDAR technology, the extraction of point features from point clouds often has low accuracy without pre-established man-made reflectors. Except for point features, linear features are another popular registration primitive. Compared to point and linear features, the extraction of planar features from point clouds is more convenient and often has higher accuracy. However, fewer available methods use planar features as registration primitives; this may be due to the diverse mathematical expressions, which make it difficult for us to compare and determine the differences between two planar features.
Moreover, according to whether the initial approximate estimates of those unknown transformation parameters are needed in advance, the available registration methods can be divided into two categories: iterative methods [
1,
2,
5,
9,
12] and closed-form methods [
13,
14,
15,
16]. Most available methods obtain the registration results by iterative computation; however, their disadvantages must be treated properly. First, the nonlinear registration model must be linearized before it can be calculated by computers, and the initial approximate estimates of those unknown parameters must be determined in advance to assist the linearization. Second, the number of iterations is closely related to the choice of those initial estimates; that is, when they are not close to the maximum likelihood values, iterations will increase. Comparatively, closed-form methods do not need any initial approximate estimates of the unknown transformation parameters, more importantly, the optimal transformation parameters can be obtained in only one step. A detailed comparison of the iterative methods and closed-form method is shown in
Table 1.
Based on the abovementioned analysis, a closed-form solution to planar feature-based registration of point clouds is proposed. Firstly, a quad tuple-based representation of planar features is given and dual quaternions are then employed to represent the spatial transformation. After the operations between the dual quaternions and the quad tuple are explained, an error norm (error function) is constructed by supposing that the two conjugate planar features are equivalent after registration. Based on L2-norm-minimization, detailed derivations of the proposed solution are given step by step. Lastly, two experiments are designed to verify the correctness and feasibility of the proposed method, in which simulated and real data are both incorporated.
The remainder of the paper is organized as follows.
Section 2 reviews some related work.
Section 3 gives the operations between dual quaternions and the quad tuple-based representation of planar features in three-dimensional space.
Section 4 explains the proposed solution, in which the detailed derivations of all formulas are given step by step.
Section 5 shows the experiments and the results.
Section 6 discusses the proposed solution and gives suggestions for future work.
Section 7 concludes the paper.
2. Related Work
2.1. Quaternion and Its Application in Point Cloud Registration
Quaternion was first proposed by Hamilton W. R., which has been proved to be a convenient and effective way to describe rotation in three-dimensional space [
17]. Due to its compactness and high efficiency, quaternion has attracted considerable attention from researchers working in different fields. The representative work can be summarized as follows: Horn introduced unit quaternion to solve the absolute orientation problem in photogrammetry [
13]; Shen et al. used unit quaternion in the transformation of two sets of three-dimensional coordinates [
12]; Zeng et al. presented a unit quaternion-based, iterative solution to coordinate transformation in geodesy [
18]; Joseph et al. introduced unit quaternion in robot arm manipulation and presented an extended Kalman filter-based algorithm for the estimation of human motion [
19]; Kim et al. presented a similar algorithm to Joseph et al., which employed unit quaternion for the real-time estimation of orientation in robot arm manipulation [
20].
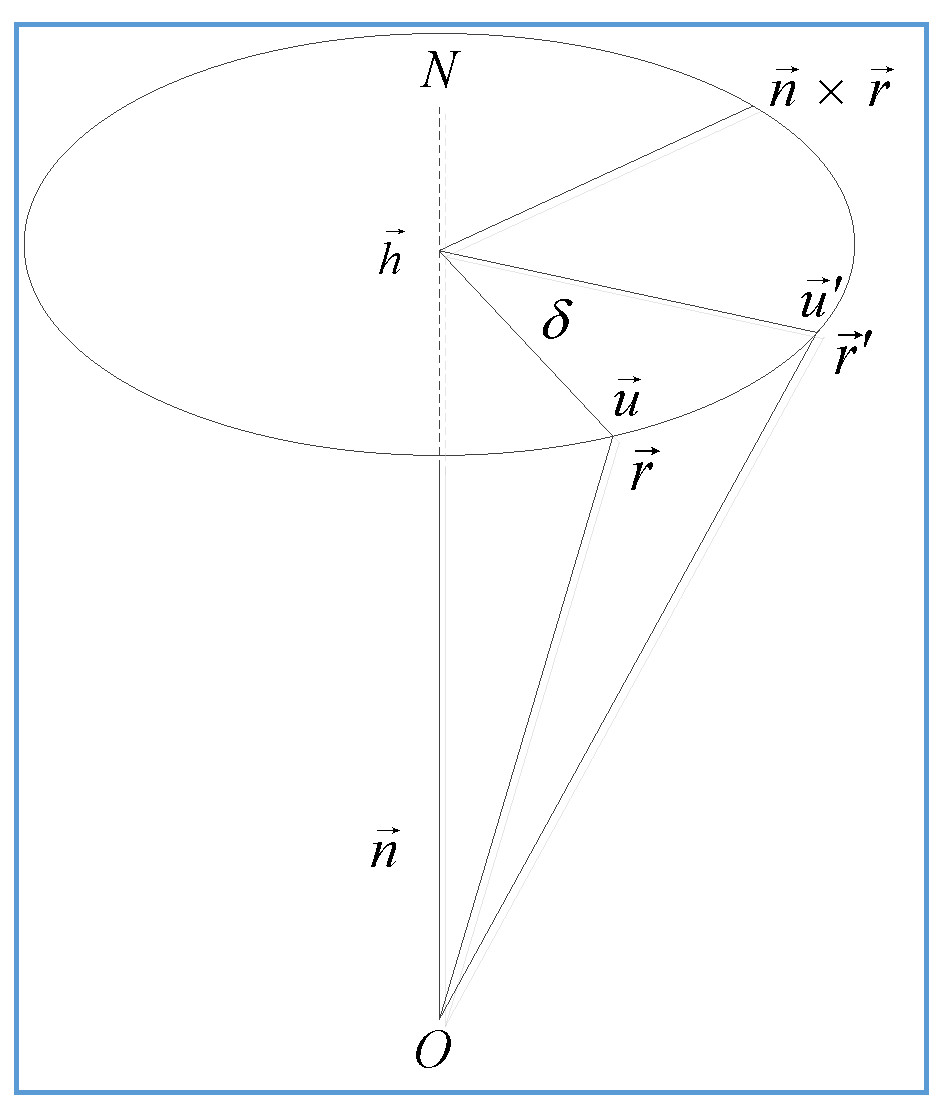
As is known, spatial transformation mainly consists of a rotation and a translation. However, unit quaternion can only represent the spatial rotation in three-dimensional space, as shown in
Figure 1. Later, dual quaternion was presented to represent spatial rotation and translation simultaneously, as shown in
Figure 2, in which two quaternions are integrated with the aid of a dual number. The first successful application of dual quaternion in estimating the unknown spatial transformation parameters was introduced by Walker et al. [
15]. Based on the analysis of correspondences between dual quaternion-based and matrix-based representations, a single cost function was formulated, which enabled the simultaneous calculation of six parameters in point feature-based registration. Instead of estimating only the six transformation parameters, Wang et al. added the scale parameter to a single cost function, which enabled the simultaneous derivation of rotation, translation, and scale parameters [
16]. Prošková et al. also introduced dual quaternion to represent spatial transformation; the presented approach was successfully applied for deriving the seven parameter-based transformation between two sets of three-dimensional coordinates [
21,
22].
Based on the above analysis, conclusions can be drawn that unit quaternion can only represent rotation in three-dimensional space; when it is applied in spatial transformation, such as the seven parameter-based Helmert transform, the rotation parameters must be estimated first, on which basis the translation parameters and the scale factor will later be estimated. In the case of errors being introduced into the estimation of the rotation parameters, the accuracy of the translation parameters and the scale factor will certainly be affected, which makes it a tendency that dual quaternions are introduced to represent spatial transformation.
2.2. Planar Feature-Based Registration Methods
Compared to point and linear features, planar features exist widely in those point clouds acquired from man-made buildings. On the condition that no specific man-made reflectors are used, point and linear features are often extracted by fitting and the intersection of adjacent planar features. Therefore, if planar features can be used directly in point cloud registration, the amount of calculation will be reduced greatly. In other words, the employment of planar features in point cloud registration will provide more conditions for estimating the transformation parameters than using point and linear features only. Of all existing planar feature-based registration methods, some use the distance between the point and its corresponding planar feature to construct error norms [
6,
23], others use the parallelism between the two normal vectors and the distance between the two conjugate planar features to construct error norms [
7,
24,
25,
26,
27,
28]. Detailed explanations are as follows: Grant et al. presented an iterative solution to pairwise point cloud registration, which is based on the correspondences between point and planar features [
23]. Pavan et al. presented a closed-form solution to planar feature-based registration of terrestrial LiDAR point clouds [
27], which was later applied in the global refinement for the terrestrial laser scanner (TLS) data registration [
7]. Moreover, Wang et al. [
24], Zhang et al. [
25], and Previtali et al. [
26] separately presented a planar feature-based registration algorithm based on the correspondences between each pair of planar features in which the Rodriguez matrix, Euler angles, and quaternions were, respectively, employed to represent spatial rotation. In addition, Khoshelham presented a closed-form solution to planar feature-based pairwise point cloud registration [
6] in which the Kronecker product was employed to linearize the nonlinear equations; rigid transformation and similarity transformation are both given in detail; the parallelism between normal vectors of the two conjugate planar features was not fully utilized. Föstner and Khoshelham presented an optimal solution and three direct solutions for efficient motion estimation from plane-to-plane correspondences and provided an analysis of the accuracy of the solutions, comparing their performance with the classical iterative closest point (ICP) algorithm [
28].
In general, few of the available methods incorporate the scale parameter in planar feature-based registration, which makes it difficult to apply them in the fusion of data from different sources. Moreover, some methods use point and planar features as registration primitives; the role of normal directions is neglected in the estimation of transformation parameters.
To summarize: (1) When unit quaternion is introduced to represent spatial rotation in point cloud registration, the accuracy of the translation parameters and the scale factor will surely be affected in the case of the introduction of errors in the estimation of rotation parameters; (2) Planar feature is a good alternative in point cloud registration, however, the determination of the difference between each corresponding planar feature is difficult with traditional mathematical expressions; (3) Few methods incorporate the scale parameters in the planar feature-based registration, which makes it difficult to apply them in the fusion of data from different sources; (4) Most available methods estimate the registration parameters by iterative calculation, the initial approximate estimates of the unknown parameters must be determined in advance to assist the linearization. Based on the above analysis, our goal was to develop a closed-form solution to a planar feature-based registration algorithm in which a quad tuple-based representation of planar features in three-dimensional space is given, which made it possible to directly determine the difference between each pair of corresponding planar features; dual quaternions were employed to represent the spatial transformation in three-dimensional space which made it possible to estimate all the registration parameters simultaneously. The scale factor was also considered in our registration methods, which made it possible to apply our method in the fusion of data from different sources.
3. Dual Quaternion-Based Transformation of Planar Features
3.1. Representation of a Plane in Three-Dimensional Space
Traditionally, a plane is represented by the normal vector
and any one point
lying on it. Since the selection of the point
is random, there is more than one representation for a single plane, which makes it difficult to compare and determine the difference between two planes. To ensure the unique representation of a plane in three-dimensional space, a quad tuple-based representation method was employed, as shown in
Figure 3, in which a plane can be represented as a quad tuple
, as shown in Equation (1):
where
represents the normalized normal vector that forms
, and
represents the plane moment, that is, the distance between the origin and the plane that forms
.
3.2. Definition of a Dual Quaternion
A quaternion is a composite of four real numbers, which is generally represented in the form of a quad tuple
, as shown in Equation (2):
on the condition that
,
is usually called a unit quaternion.
A dual quaternion is a composite of two quaternions and a dual number
, as shown in Equation (3):
where
and
are both quaternions, each of which corresponds to the real part and the dual part of
separately; when
,
is a unit dual quaternion, which is the default definition of a dual quaternion.
3.3. Operation Rules for Dual Quaternions
Given two dual quaternions
and
, the addition, subtraction, and multiplication between them can be expressed as shown in Equation (4):
Furthermore, multiplication between
and
can also be represented as shown in Equation (5):
where
,
.
3.4. Dual Quaternion-Based Transformation of Planar Features
According to the definition of a dual quaternion, the spatial transformation of a plane in three-dimensional space can be expressed as shown in Equation (6):
where
is the dual quaternion corresponding to the spatial transformation;
is the conjugate of
that forms
;
and
represent a pair of conjugate planar features,
represents the one before transformation and
represents the one after transformation.
To realize the dual quaternion-based similarity transformation, a plane should be represented as shown in Equation (7):
where
, which corresponds the normal vector of the plane, and
, which corresponds to the moment of the plane.
According to Chasles’ theorem [
29], when the scale parameter is not considered, six independent parameters are needed to represent the transformation between two different coordinate frames. However, when a dual quaternion is used, there are eight parameters in total. Two constraints should be added to estimate the unknown parameters for the spatial similarity transformation, as shown in Equation (8):
where
is the quaternion that represents the spatial rotation and
is the quaternion that represents the spatial translation. The explanation in Equation (8) is that
is a unit quaternion and it is orthogonal to
.
4. Planar Features-Based Registration Model
4.1. Construction of the Objective Functions
In three-dimensional space, the transformation of a plane can be expressed as shown in Equation (9):
where
and
represent the normal vector and the moment of the plane before transformation, respectively;
and
represent the normal vector and the moment after transformation, respectively;
,
, and
separately represent the transformation matrix, the translation vector, and the scale factor between the two coordinate systems.
With a dual quaternion, Equation (9) can be further expressed as Equation (10):
where
is the unit quaternion corresponding to the rotation matrix
,
is the conjugate of
,
,
,
, and
.
Making
, Equation (10) can be rewritten as Equation (11):
where
is the conjugate of
.
Based on Equation (7), Equation (11) can be further rewritten as Equation (12):
Considering the existence of random errors, the planar feature-based registration approach aims to minimize the difference between
and
. The quadratic form of the difference between
and
is introduced as the error equations according to the least squares criteria, as shown in Equations (13) and (14):
The transformation parameters can be obtained when the expression reaches its minimum. Considering that and are both positive, when each term reaches its minimum, will be minimal. The optimal value of will be obtained by the minimization of Equation (13); and μ will be obtained by the minimization of Equation (14).
4.2. Solution of Rotation Quaternions
Making
,
, Equation (13) can be decomposed as Equation (15):
Using Equation (5) as the restriction, the error function can be expressed as Equation (16):
where
is a Lagrange multiplier constant.
Taking the partial derivative of Equation (16) yields Equation (17):
Making
, Equation (17) can be further expressed as Equation (18):
According to the definition of the eigenvalues and eigenvectors of a matrix, represents one of the four eigenvectors of , and represents the corresponding eigenvalue of . Among the four eigenvectors that satisfy Equation (18), the optimal solution can be determined by referring back to Equation (17).
Multiplying Equation (17) with
yields Equation (19):
Substituting Equation (19) into Equation (16) yields Equation (20):
When reaches its maximum, Equation (20) will be minimized. The conclusion can be drawn that the optimal solution of equals to the eigenvector corresponding to maximum eigenvalue of .
4.3. Solution of the Translation Quaternions and the Scale Factor
Making
,
,
,
,
,
,
,
,
, and decomposing Equation (14), we can obtain Equation (21):
Using Equation (5) as the restriction, the best quaternion
to represent the translation can be obtained when Equation (22) is minimized:
where
is a Lagrange multiplier constant.
Taking the partial derivative of Equation (22), with respect to
and
, and making them equal to zero, we obtain Equations (23) and (24):
Based on Equation (24), the scale factor
can be expressed as Equation (25):
Substituting Equation (25) into Equation (23) yields Equation (26):
where
.
Multiplying Equation (26) with
, we obtain Equation (27):
With Equation (27),
can be expressed as Equation (28):
Since
is a skew-symmetric matrix, the first item of Equation (28) will be zero, that is,
. Equation (28) can be simplified, as shown in Equation (29):
The quaternion corresponding to the translation between the two neighboring LiDAR stations can be obtained using Equation (30):
4.4. Implementation of the Proposed Solution
As in
Figure 4, the given point clouds from the two neighboring LiDAR stations, namely the reference station and the unregistered station, suppose that
and
represent the two pairs of conjugate planar features separately extracted from them, where
and
are quaternion-based representations corresponding to
and
. In the implementation of the proposed algorithm, the following steps are suggested to obtain the seven unknown parameters:
- (1)
Based on the normal vectors of each pair of conjugate planar features, construct matrix A and calculate the maximum eigenvalue and its corresponding eigenvector of A;
- (2)
Calculate the quaternion using Equation (26);
- (3)
Calculate the scale factor using Equation (25);
- (4)
Calculate the quaternion using Equation (30).
Using , , and , a plane in three-dimensional space can be transformed from one coordinate system to another. More importantly, since each pair of conjugate planar features is extracted from the two neighboring LiDAR stations, point clouds will be merged using , , and .
5. Experiments and Results
The proposed planar feature-based registration algorithm was implemented using Matlab. Two experiments were designed to verify the correctness and the feasibility in which simulated data and real data were both incorporated.
5.1. Simulated Data
The first experiment was designed to verify the correctness of the proposed algorithm. Five pairs of simulated planar features were designed as shown in
Figure 5. Mathematical descriptions of the simulated planar features were as shown in
Table 2. The pre-established spatial similarity transformation parameters were as shown in
Table 3.
The obtained transformation parameters were as shown in
Table 4; the residuals between each pair of conjugate planar features after registration are also given.
Based on the results given in
Table 4, the calculated rotation matrix and the scale factor were both consistent with the pre-established ones. The small deviation between the calculated translation vector and the pre-established one can be attributed to the rounding errors in the calculation, which can largely be ignored in practical applications. The conclusion can be drawn that the proposed solution is correct and the obtained result is as expected.
5.2. Real Data
The second experiment was designed to verify the feasibility of the proposed algorithm. The point clouds were collected by a model Riegl LMS-Z420i terrestrial laser scanner. In order to collect the complete point cloud data of the building, a total of eight observation stations were set up around it. The average distance between each observation station and the building was about 100 m, and the average sampling interval was set to 4 cm. Seven pairs of conjugate planar features were extracted from the two neighboring point clouds as shown in
Figure 6, and the extracted planar features were as shown in
Table 5.
The obtained transformation parameters and residuals between each pair of conjugate planar features are both given in
Table 6. To further verify the correctness and the feasibility of the proposed solution, a unit quaternion-based, iterative method [
8] was employed to estimate the transformation parameters; the results are also shown in
Table 6.
The visual effects of the point clouds from the two neighboring LiDAR stations before and after registration were as shown in
Figure 5.
As shown in
Table 6 and
Figure 7, by using the obtained transformation parameters to register the two neighboring stations, there were no significant residuals between each pair of conjugate planar features after registration. More importantly, there were also no significant differences between the results obtained by our method and by the unit quaternion-based iterative method [
8]; the root mean square error (RMSE) of the normal and moment’s differences between conjugate planar features were exactly the same. The conclusion can be drawn that the newly proposed closed-form solution to pairwise registration of LiDAR point clouds is correct and feasible.
6. Discussion
On the assumption that the normal directions of each pair of conjugate planar features are the same, the proposed quad tuple-based representation method can provide a unique mathematical expression of any planar feature in three-dimensional space; the differences between two planar features can be determined by direct comparison, which makes it convenient to propose and implement a closed-form solution to planar feature-based point cloud registration. The results of the two designed experiments were both correct, which proves that the proposed closed-form solution is capable of dealing with point cloud registration problems on the condition that sufficient corresponding planar features are provided as registration primitives.
It should be noted that any vector in three-dimensional space can be expressed in another form with the same module and an opposite direction; however, the prerequisite of our solution is that normal directions of each pair of conjugate planar features should be exactly the same after registration. On the condition that the prerequisite is not fulfilled, ensuring the proper run of the proposed solution will be one of our objectives in the future.
7. Conclusions
On the condition that point and linear features are not sufficient, planar features are good alternatives to ensure the proper run of the point cloud registration algorithm. Compared to point and linear features, extracting planar features from point clouds is more convenient. Furthermore, the impact of random errors can be significantly reduced by least squares fitting. Based on the quad tuple-based representation method of planar features in three-dimensional space, a closed-form solution to planar feature-based registration of point clouds is proposed. Two experiments were designed, in which both simulated data and real data were used to verify the correctness and effectiveness of the proposed solution. With the simulated data, the calculated registration results were consistent with the pre-established parameters and with the real data, there were also no significant differences between the results obtained by our method and by the available iterative method [
8]; the root mean square error (RMSE) of the normal and moment’s differences between conjugate planar features were the same.
The conclusion can be drawn that the newly proposed closed-form solution to pairwise registration of LiDAR point clouds is correct and feasible. Moreover, the advantages of the proposed solution can be summarized as follows: (1) By using eigenvalue decomposition to replace the linearization of the objective function, the presented solution does not require any initial estimates of unknown transformation parameters in advance, which assures the stability and robustness of the algorithm; (2) On the condition that no man-made reflectors are used, planar features are directly extracted from point clouds using least squares fitting, the impact of random errors can be reduced significantly and the reliability of the estimated transformation parameters is higher than point and linear feature-based methods; (3) In contrast to Euler angle-based and rotation matrix-based methods, using dual quaternions to represent spatial rotation greatly reduces additional constraints in the estimation of similarity transformation parameters.
Author Contributions
Conceptualization, Yongbo Wang; methodology, Yongbo Wang; software, Yongbo Wang; validation, Yongbo Wang, Nanshan Zheng and Zhengfu Bian; formal analysis, Nanshan Zheng; investigation, Yongbo Wang; writing—original draft preparation, Yongbo Wang; writing—review and editing, Nanshan Zheng and Zhengfu Bian; funding acquisition, Yongbo Wang and Zhengfu Bian. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key R&D Program of China, grant number 2017YFE0119600 and by the National Natural Science Foundation of China, grant number 41271444.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
The authors would like to thank the anonymous reviewers and editors for providing valuable comments and suggestions which helped improve the manuscripts greatly.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Arun, K.S.; Huang, T.S.; Bostein, S.D. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 698–700. [Google Scholar] [CrossRef] [Green Version]
- Besl, P.J.; Mckay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Habib, A.; Ghanma, M.; Morgan, M.; Al-Ruzouq, R. Photogrammetric and LiDAR Data Registration Using Linear Features. Photogramm. Eng. Remote. Sens. 2005, 71, 699–707. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, H.; Liu, Y.; Niu, X. Linear-Feature-Constrained Registration of LiDAR Point Cloud via Quaternion. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 1057–1062. [Google Scholar]
- Sheng, Q.; Chen, S.; Liu, J.; Wang, H. LiDAR Point Cloud Registration based on Plücker Line. Acta Geod. Cartogr. Sin. 2016, 45, 58–64. [Google Scholar]
- Khoshelham, K. Closed-form solutions for estimating a rigid motion from plane correspondences extracted from point clouds. ISPRS J. Photogramm. Remote. Sens. 2016, 114, 78–91. [Google Scholar] [CrossRef]
- Pavan, N.; Santos, D.; Khoshelham, K. Global Registration of Terrestrial Laser Scanner Point Clouds Using Plane-to-Plane Correspondences. Remote Sens. 2020, 12, 1127. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.B.; Zheng, N.S.; Bian, Z.F. A Quaternion-based, Planar Feature-constrained Algorithm for the Registration of LiDAR Point Clouds. Acta Opt. Sin. 2020, 40, 2310001. [Google Scholar] [CrossRef]
- Zheng, D.; Yue, D.; Yue, J. Geometric feature constraint based algorithm for building scanning point cloud registration. Acta Geod. Cartogr. Sin. 2008, 37, 464–468. [Google Scholar]
- Wang, Y.; Wang, Y.; Han, X. A Unit Quaternion based, Point-Linear Feature Constrained Registration Approach for Terrestrial LiDAR Point Clouds. J. China Univ. Min. Technol. 2018, 47, 671–677. [Google Scholar]
- Chai, S.; Yang, X. Line primitive point cloud registration method based on dual quaternion. Acta Opt. Sin. 2019, 39, 1228006. [Google Scholar] [CrossRef]
- Shen, Y.Z.; Chen, Y.; Zheng, D.H. A quaternions-based geodetic datum transformation algorithm. J. Geod. 2006, 80, 233–239. [Google Scholar] [CrossRef]
- Horn, B.K. Closed-form solution of absolute orientation using unit quaternions. J. Opt. Soc. Am. 1987, 4, 629–642. [Google Scholar] [CrossRef]
- Horn, B.K. Closed form solution of absolute orientation using orthonormal matrices. J. Opt. Soc. Am. 1988, 5, 1127–1135. [Google Scholar] [CrossRef] [Green Version]
- Walker, M.W.; Shao, L.; Volz, R.A. Estimating 3-D Location Parameters Using Dual Number Quaternions. CVGIP Image Underst. 1991, 54, 358–367. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, Y.; Wu, K.; Yang, H.; Zhang, H. A dual quaternion-based, closed-form pairwise registration algorithm for point clouds. ISPRS J. Photogramm. Remote Sens. 2014, 94, 63–69. [Google Scholar] [CrossRef]
- Hamilton, W.R. On quaternions, or on a new system of imaginaries in algebra. Philos. Mag. 1844, 25, 489–495. [Google Scholar]
- Zeng, H.; Yi, Q. Quaternion-Based Iterative Solution of Three-Dimensional Coordinate Transformation Problem. J. Comput. 2011, 6, 1361–1368. [Google Scholar] [CrossRef]
- Joseph, J.; Laviola, J. A comparison of unscented and extended Kalman filtering for estimating quaternions motion. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 2435–2440. [Google Scholar]
- Kim, A.; Golnaraghi, M.F. A quaternions-based orientation estimation algorithm using an inertial measurement unit. In Proceedings of the Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; pp. 268–272. [Google Scholar]
- Prošková, J. Application of dual quaternions algorithm for geodetic datum transformation. J. Appl. Math. 2011, 4, 225–236. [Google Scholar]
- Prošková, J. Discovery of Dual Quaternions for Geodesy. J. Geom. Graph. 2012, 16, 195–209. [Google Scholar]
- Grant, D.; Bethel, J.; Crawford, M. Point-to-plane registration of terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2012, 72, 16–26. [Google Scholar] [CrossRef]
- Wang, L.; Li, G.; Zhang, Q. Plane Fitting and Transformation in Laser Scanning. J. Geomat. Sci. Technol. 2012, 29, 101–104. [Google Scholar]
- Zhang, D.; Huang, T.; Li, G.; Jiang, M. Robust Algorithm for Registration of Building Point Clouds Using Planar Patches. J. Surv. Eng. 2012, 138, 31–37. [Google Scholar] [CrossRef]
- Previtali, M.; Barazzetti, L.; Brumana, R.; Scaioni, M. Laser Scan Registration Using Planar Features. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2014, 40, 501–508. [Google Scholar] [CrossRef] [Green Version]
- Pavan, N.L.; dos Santos, D.R. A global closed-form refinement for consistent TLS data registration. IEEE Geos. Remote Sens. Lett. 2017, 14, 1131–1135. [Google Scholar] [CrossRef]
- Föstner, W.; Khoshelham, K. Efficient and accurate registration of point clouds with plane to plane correspondences. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017; IEEE Computer Society: Washington, DC, USA, 2017; pp. 2165–2173. [Google Scholar]
- Chasles, M. Note sur les Proprietes Generales du Systeme de Deux Corps Semblables entr’eux, Bullettin de Sciences Mathematiques. Astron. Phys. Chim. 1830, 14, 321–326. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}