1. Introduction
Forest mapping plays a decisive role in many aspects including mitigating climate change, reconstruction of the ecological environment, and promoting economic development. Both natural and planted forests fulfill these aspects and applications, resulting in a wide range of management practices and ecosystems [
1]. Traditional mapping techniques use field measurements, which are time-consuming and thus expensive. In contrast, remote sensing data provide tree information from large-scale projects in a shorter time. The rough terrain and dense canopy render forest mapping challenging to both traditional and developing techniques. Advances in modern remote sensing techniques overcome these challenges owing to the large-scale data collection and the variety of perspectives. Light Detection And Ranging (LiDAR) represents a valuable remote sensing tool for forest mapping, evaluation and inventory calculation, with a variety of platforms, from ground-based to air-based modes. Recently, the evolution of light-weight platforms, such as Unmanned Aerial Vehicles (UAVs) having onboard laser sensors, handheld laser scanners, and Backpack Laser Scanners (BLS), has made them emerging devices in forest planning [
2,
3,
4,
5]. In addition to the relatively low cost, light weight, and operational flexibility of the UAV system, the main advantage is the provision of data in a global coordinate frame using an on-board Global Navigation Satellite System and Inertial Measurement Unit (GNSS/IMU) sensors. Moreover, the use of UAVs in forests offers rich information about the canopy structure and provides accurate tree heights. However, the under-canopy structure is scanned at a low density, which is challenging to UAVs in high-density forests [
6,
7] depending upon the sensor capabilities, especially the LiDAR pulse energy.
The UAV-LiDAR has been widely used in forestry applications due to its relatively low time-cost, large-scale coverage and lower occlusion compared to the ground-based LiDAR platforms. The main feature of the UAV systems is that they provide the data in global coordinate frame thanks to their onboard GNSS/IMU integration, which continuously measures real-time three-dimensional (3D) positions of the platform during flight with limited accuracy [
8,
9,
10,
11,
12,
13,
14,
15]. To ensure complete coverage and least occlusion in data acquisition, UAV-LiDAR data are acquired in overlapping strips/scans, which in turn allows for data redundancy that is useful in overcoming the navigation system-related errors. These errors are strongly related to the multisensory configuration of UAVs, such as misalignment and gyro drift of the Inertial Navigation System (INS) [
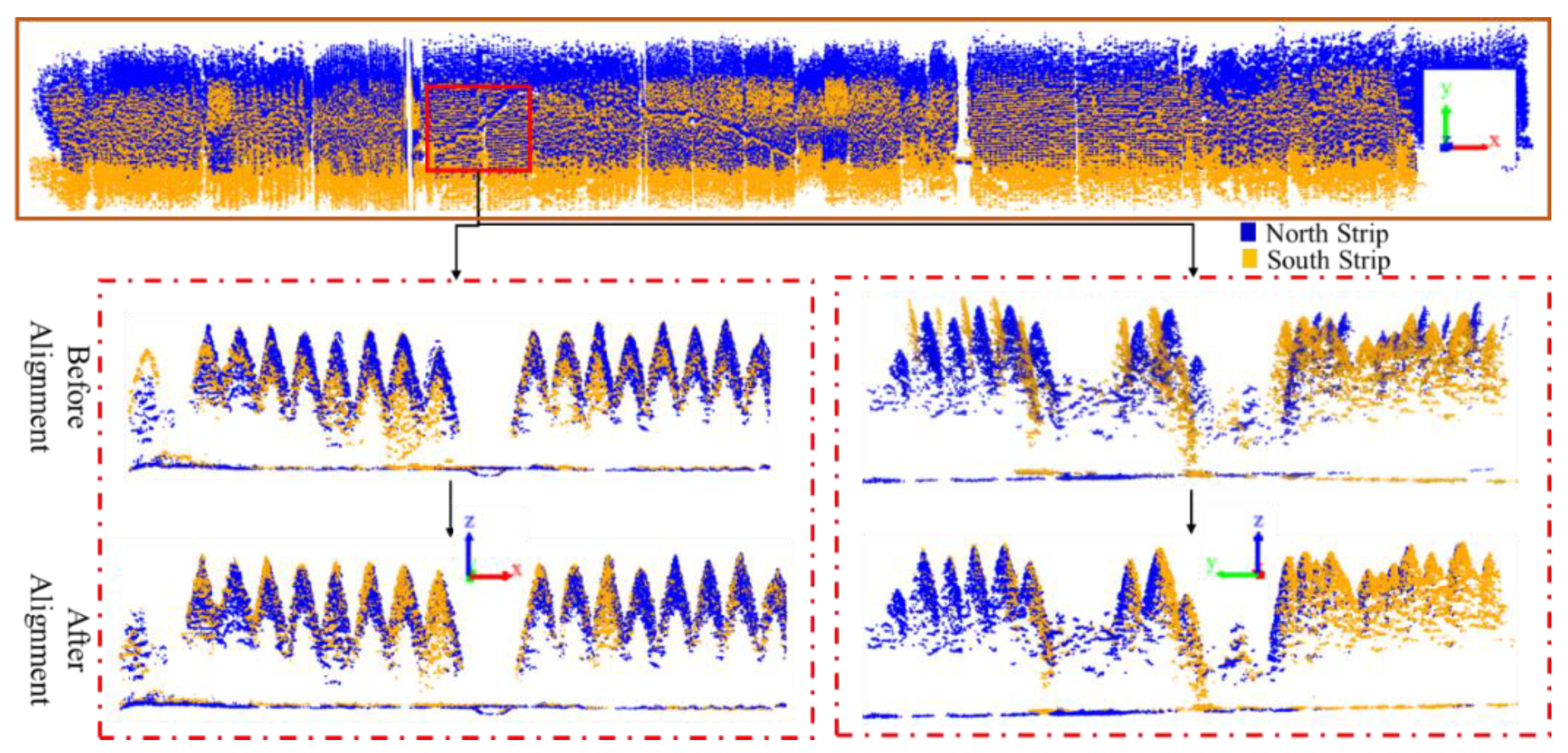
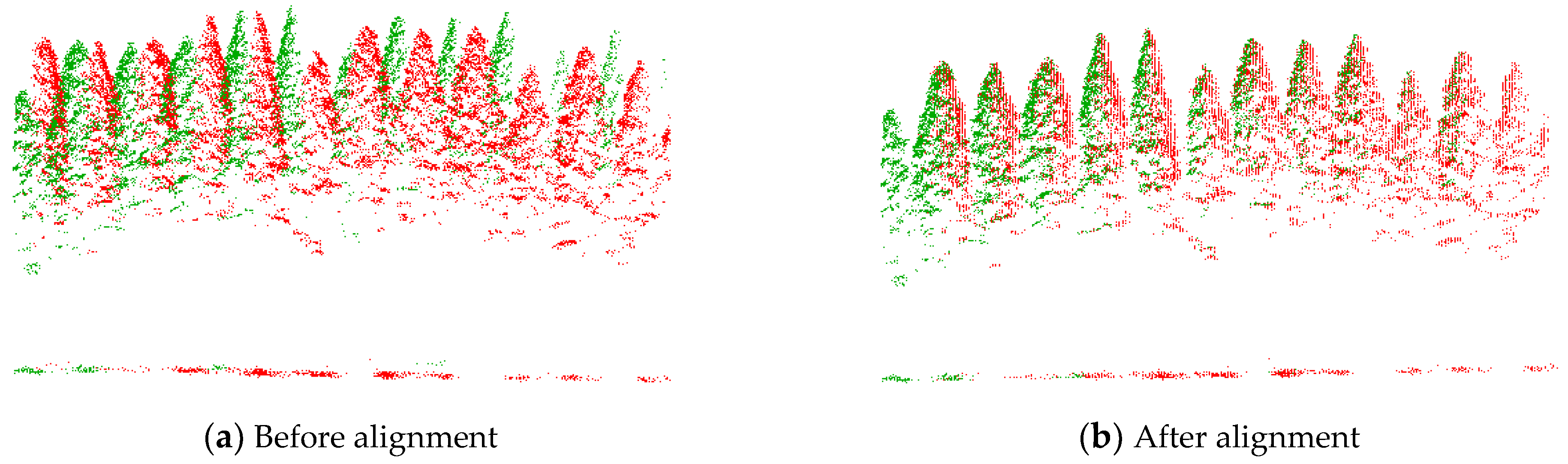
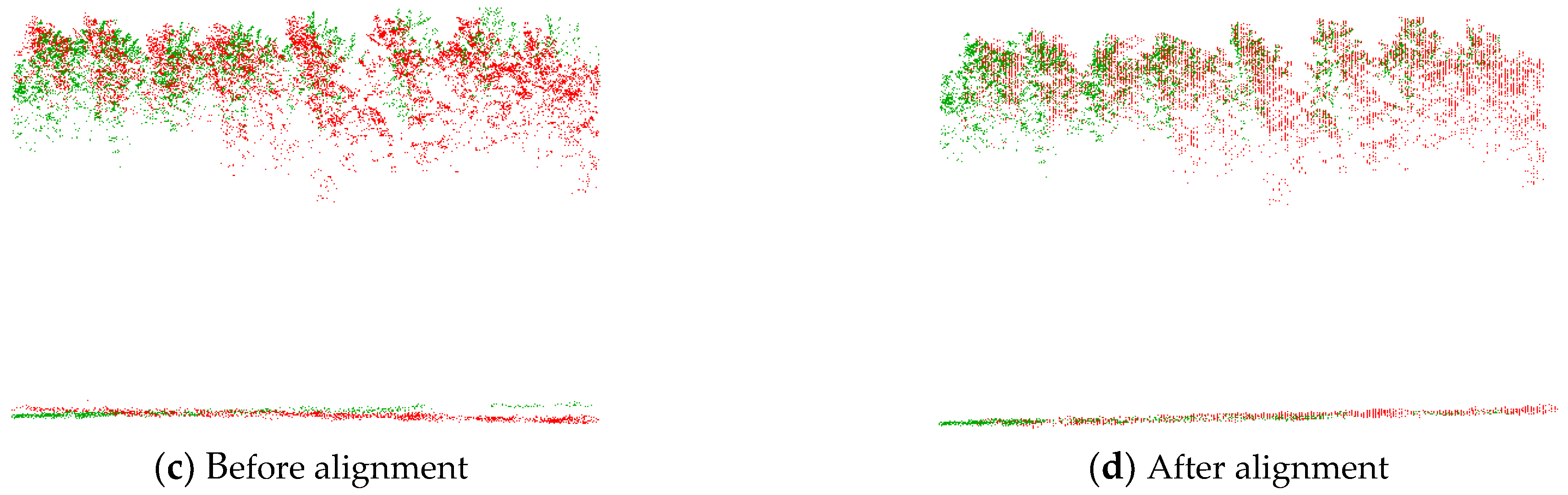
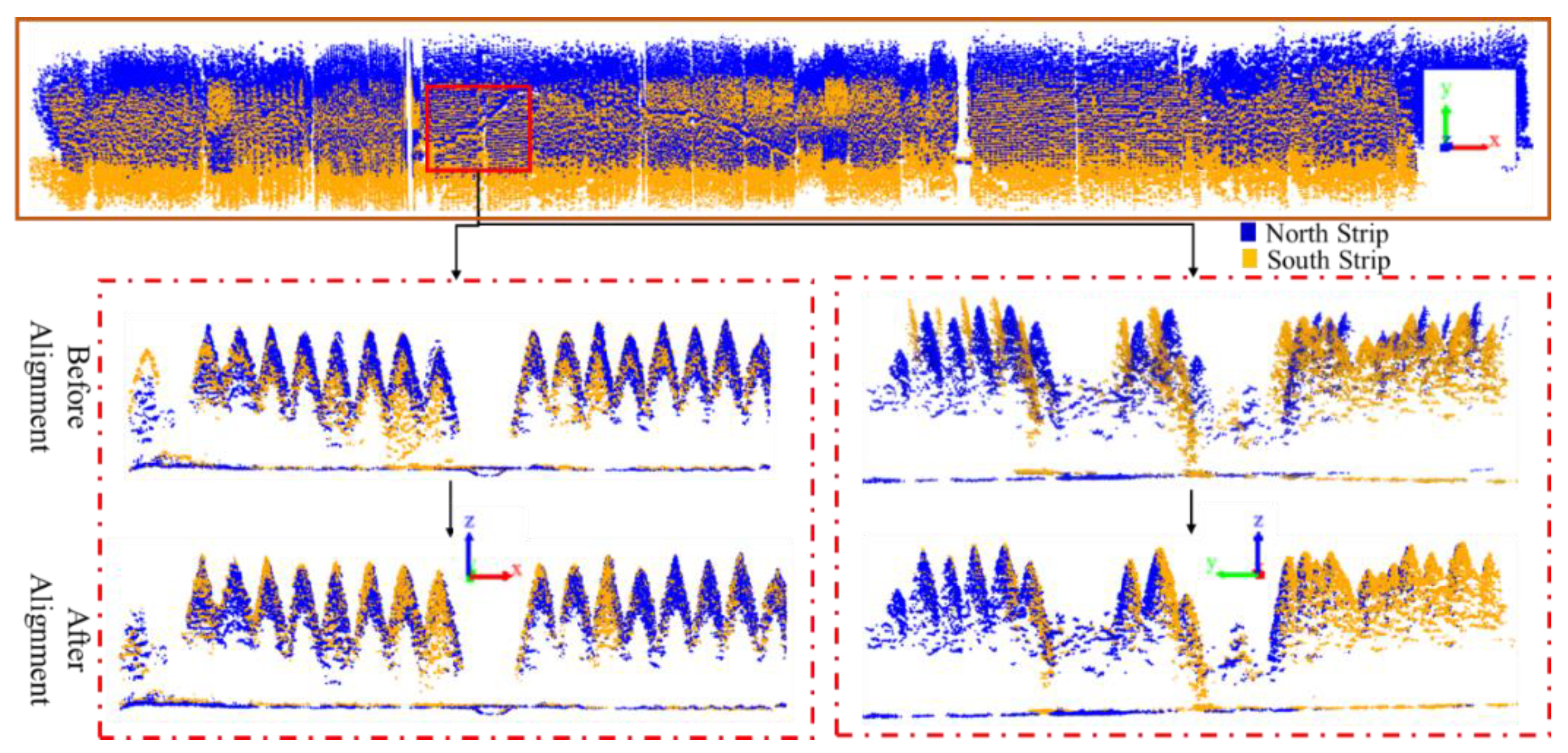
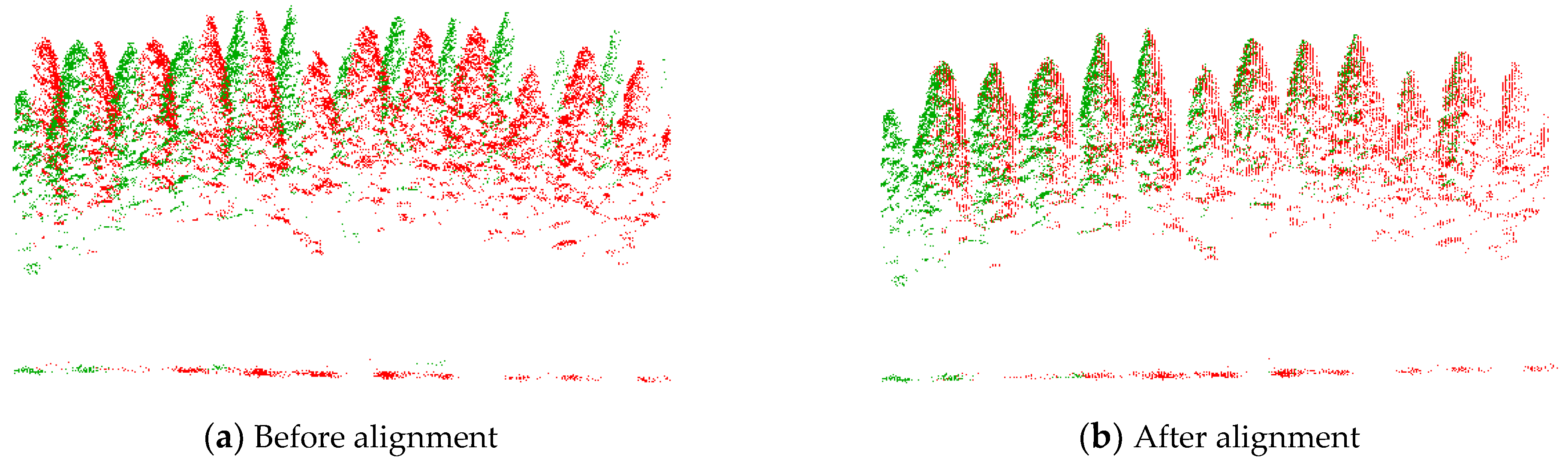
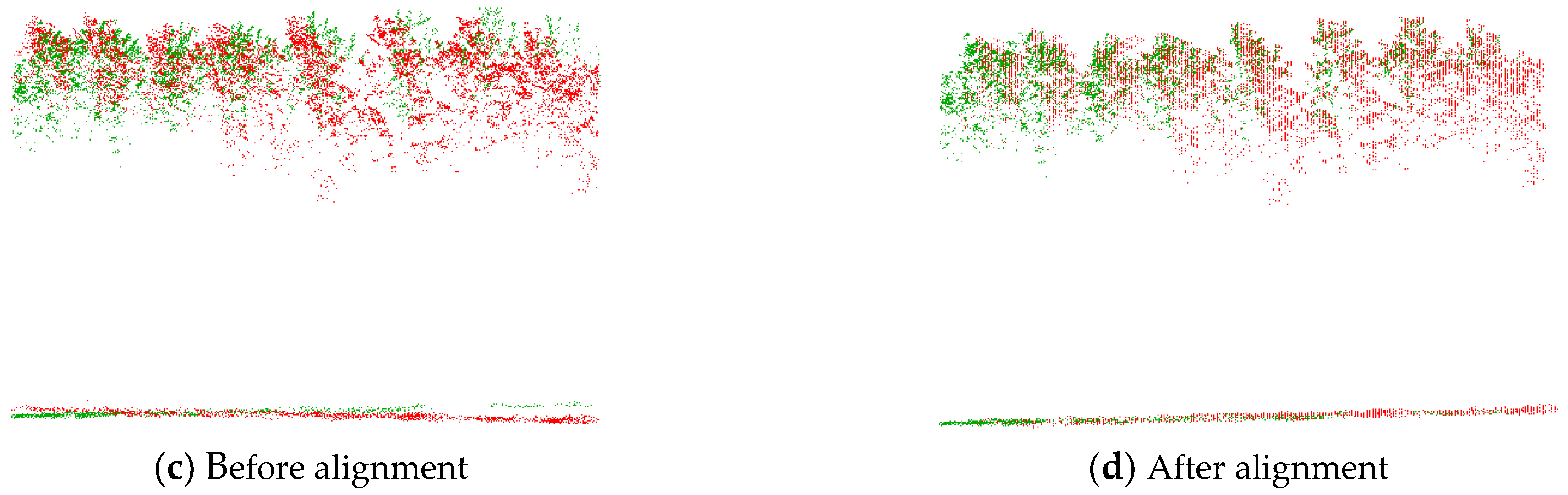
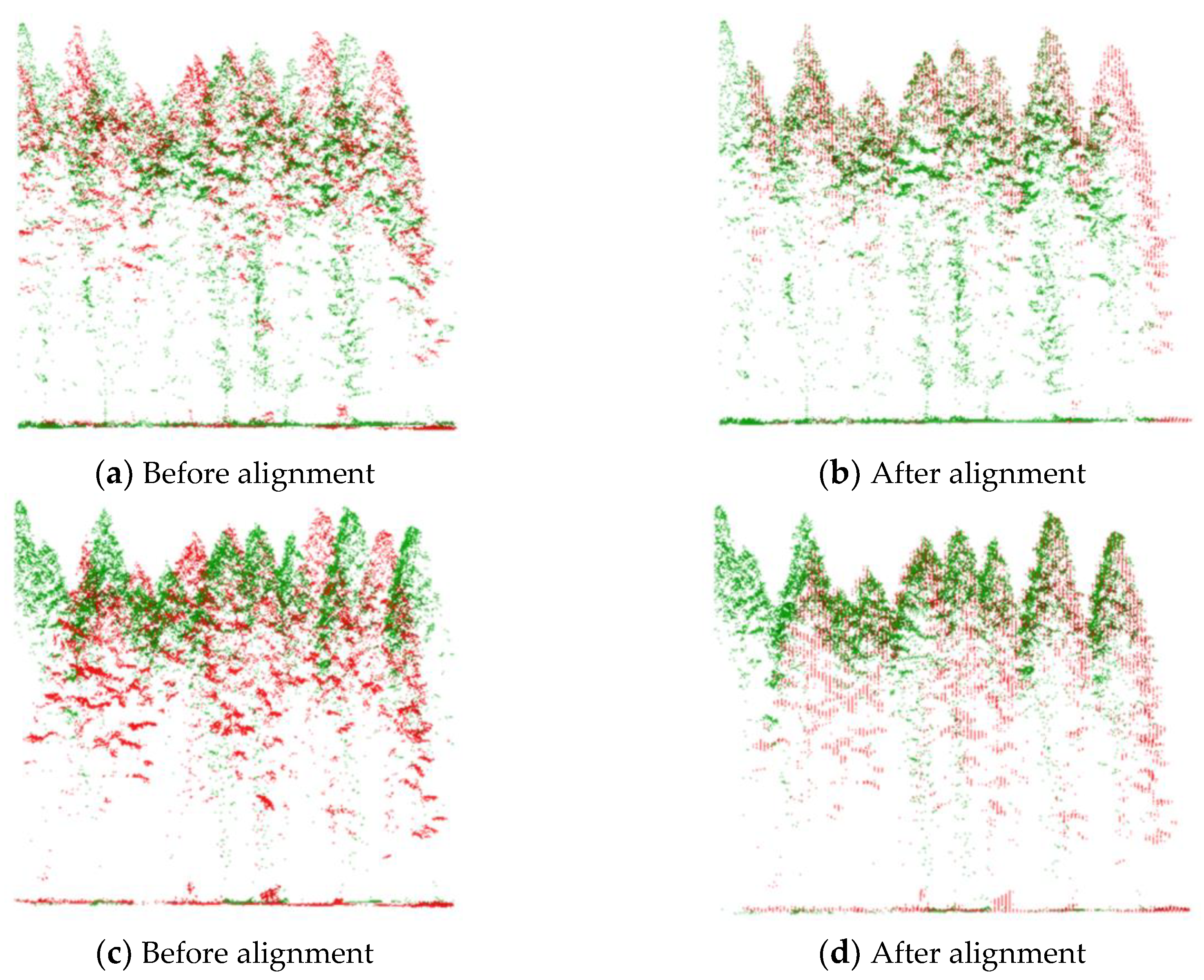
16]. This will affect the result of the scan data, especially when merging multiple overlapping scans or strips, as shown in
Figure 1. Therefore, the use of an appropriate calibration/adjustment approach is required. The core objective of this calibration process is to eradicate the effects of system-induced errors and provide better analysis of the integrated point clouds, which is referred to as strip adjustment.
The strip adjustment is simply a coordinate transformation process that aims to geometrically refine multiple strips into a unified coordinate frame. This can be done using a set of conjugate points within the strips. Thus, the chief requirement of strip alignment is to identify enough keypoints and a sufficient side overlap between strips. According to these requirements, the process drawbacks are represented in the overlap ratio, the cost of artificial markers, dense forests, and limited feature types in forest scans. The scanned features are exploited to compensate for the lack of Ground Control Points (GCPs) [
17]. The available features are related to the type and nature of the scanning project; for example, when working on urban scenes, there are a variety of features (buildings, like-pole objects, road intersections, etc.) that represent different geometries (points, lines, planes, etc.). In contrast, forest scans contain only one feature type represented in the trees, which presents a challenge for feature matching, especially in plantation forest where all trees have approximately the same parameters in both the tree and plot levels. Although much research has been done on marker-free point cloud co-registration in forested areas [
18,
19,
20,
21,
22,
23,
24], these mostly use the scanned trees and their parameters as tree location or shape analysis. These approaches are considered here to highlight the problem of feature limitation in forest scans, but not all of them perform strip alignment or work with point clouds from airborne platforms.
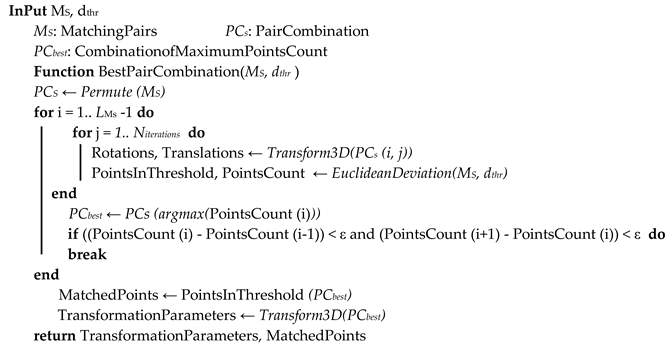
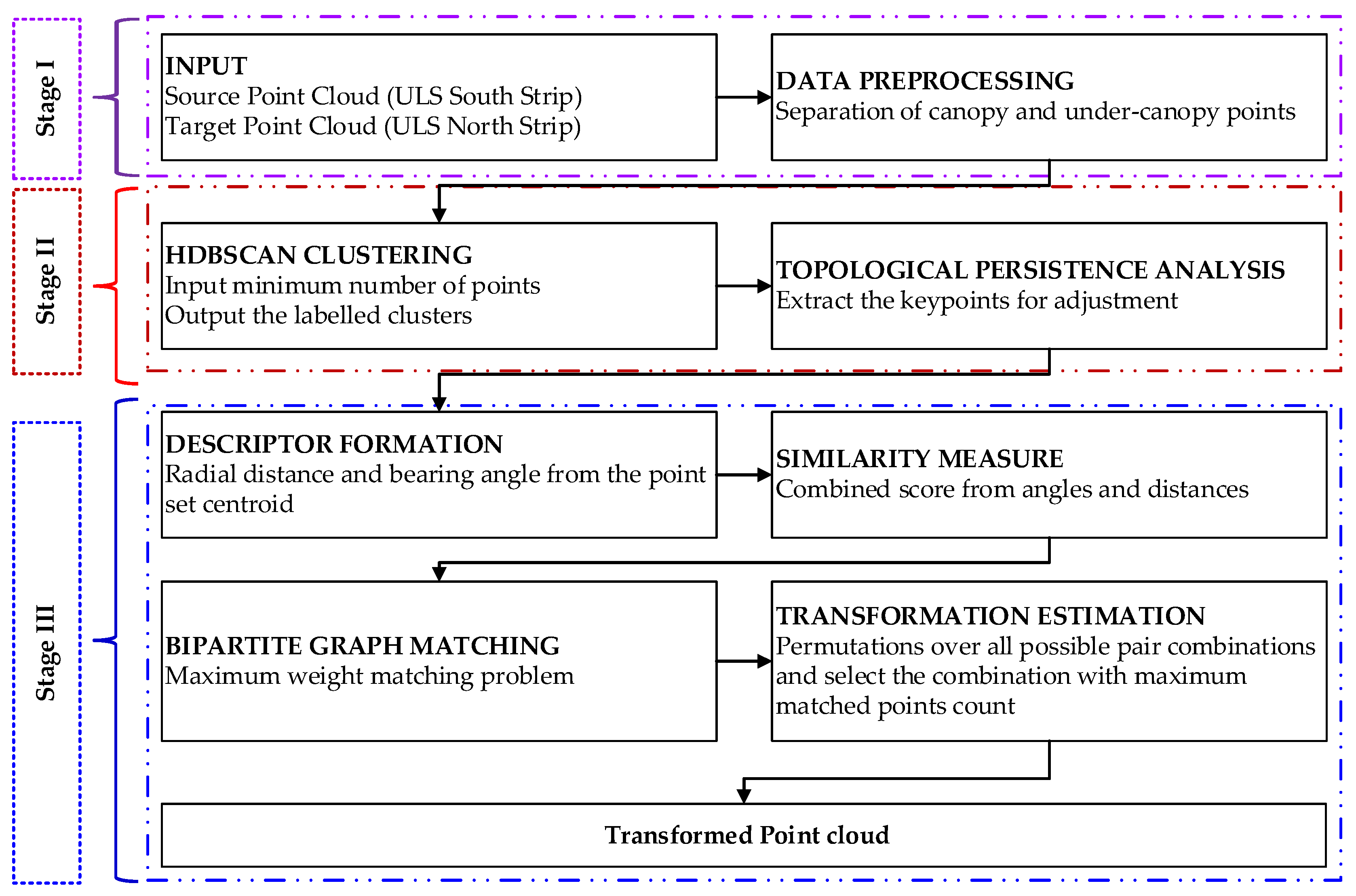
Herein, a generic method is introduced for a UAV-LiDAR strip-wise alignment in forested areas, by clustering the canopy cover using the Hierarchical Density-Based Spatial Clustering of Applications with Noise (HDBSCAN) algorithm and extraction of virtual keypoints from the topological persistence analysis of the resulting individual clusters. This research is a further development and extension of our work [
25], in which the UAV-LiDAR strips have been aligned geometrically using the keypoint sets from the canopy clusters resulting from applying Density-Based Spatial Clustering of Applications with Noise (DBSCAN) clustering on the canopy cover. The individual clusters are modeled by Gaussian mixtures and analyzed to define their means, which are used as the keypoints. Each point set is considered a local coordinate frame in which the bearing angle and radial distances from all points and the set centroid are well-defined. The point features are matched via graph matching on the source and target features to obtain one-to-one feature correspondence. The two-dimensional (2D) rigid (one rotation and two translations) coordinate transformations are searched by permuting over all pair combinations to determine the pair that reflects the maximum matching percentage within the specified planimetric distance threshold, while the z-translation is performed separately using the digital elevation model (DEM) values of the matched points. In this work, the method has been expanded with more datasets to include data from two different Pulse Repetition Frequencies (PRFs), accompanied by more experiments. The additional research contributions and innovations over [
25] are as follows:
The 3D transformation parameters are retrieved for direct alignment between the UAV-LiDAR strips without the need for extra information from single tree segmentation, which remains challenging in terms of both performance and accuracy for complex forest stands.
The advantages of the HDBSCAN algorithm are exploited to cluster the varying density point cloud data.
The appropriate keypoints are extracted using topological persistence analysis of the individual density-based clusters.
The permutations over all possible combinations from the correspondence set are used to determine the best pairs combination to calculate 3D rigid transformation with 6 DoF (three rotations and three translations).
The remainder of the paper is organized as follows. The relevant research work is presented in
Section 2.
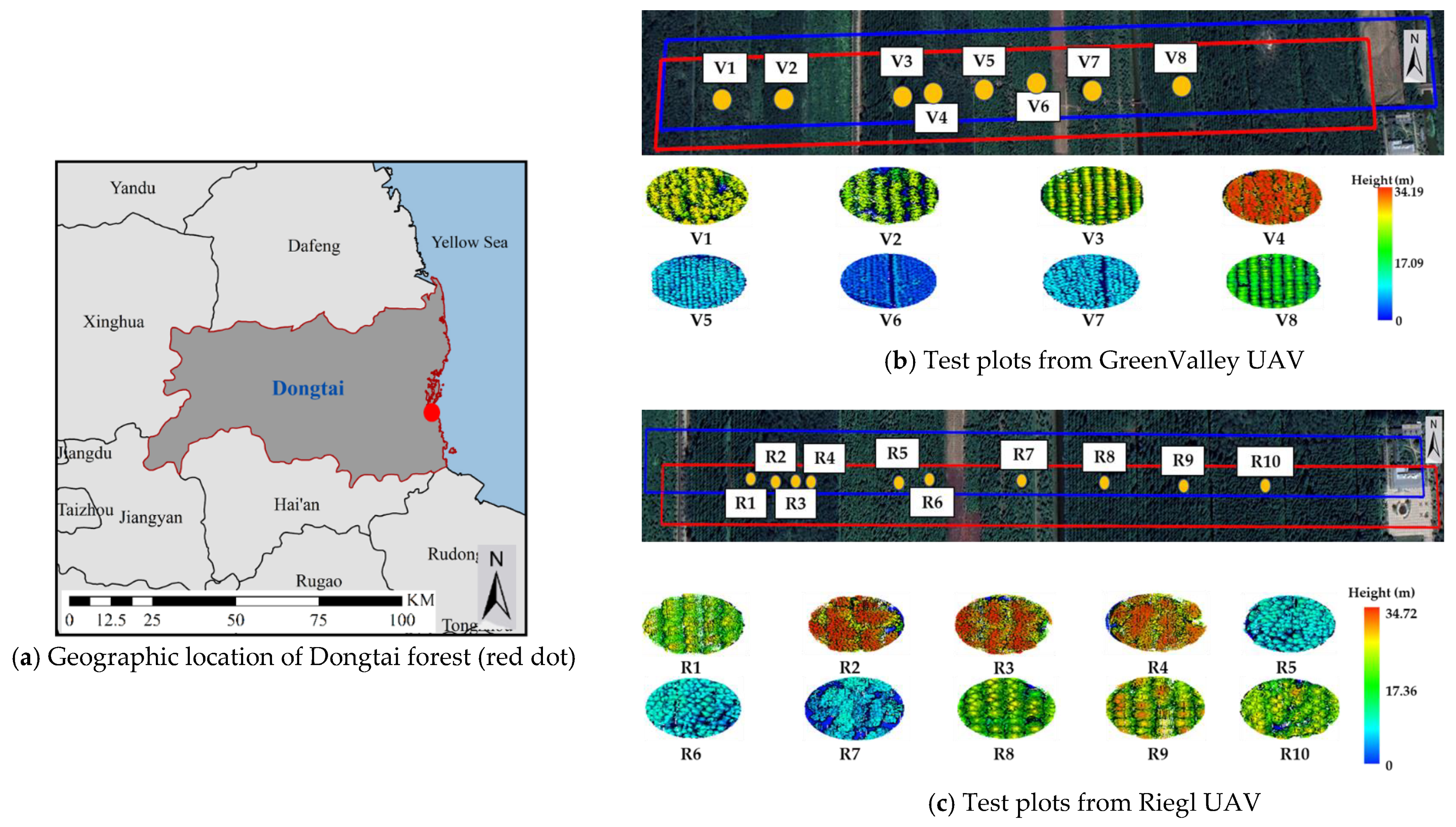
Section 3 introduces the study area and the datasets and explains the research methodology. The experimental results and discussion are presented in
Section 4 and
Section 5. Finally, the conclusions are provided in
Section 6.
2. Related Work
The strip adjustment is a major process in photogrammetric projects, whose data are acquired in strips or multiple scans. It aims to geometrically align paired or grouped strips into a unified coordinate frame. The process is performed using either marker-based or marker-free approaches. The marker-based methods are commonly found in commercial software and essentially depend on a set of GCPs that are defined as part of the scanning project. The challenges of the conventional registration method are the availability of the GNSS/IMU to the end-user and the time-cost of establishing GCPs, especially in forest areas. Therefore, the marker-free/marker-less approaches have been developed to overcome these drawbacks. The marker-less approaches are commonly used in literature for urban and forest point clouds simultaneously. On the one hand, the feature diversity in urban scenes allows various point cloud strip alignment and multi-scan co-registration based on points [
26,
27,
28,
29], lines [
17,
30,
31,
32] and planar surfaces [
33,
34,
35]. On the other hand, several point cloud co-registration approaches have been performed in forested areas using the forest structure, tree parameters and virtual points from tree shape analysis. An object-based method [
18] performed Airborne Laser Scanning /Terrestrial Laser Scanning (ALS/TLS) data integration using a heuristic search algorithm to define the optimal point pairs that are retrieved from graph matching, on the similarity score of the feature descriptors formed from the distance relationships between the segmented tree locations within the same forest plot. This work was extended [
36] using the co-register UAV/BLS data in the forest through simulated annealing optimization to geometrically align the BLS data to the UAV point cloud in 3D space. The main limitation of this research is that it primarily depends on the accuracy of the extracted tree locations. Guan et al. [
37] assumed a common fixed forest geometry between the segmented trees in the point cloud from the UAV, BLS, and TLS and introduced an approach for their co-registration, based on the angle and area matching of the Triangular Irregular Networks (TINs) created between the tree locations in the forest plot. Finally, fine registration was performed via the Iterative Closest Point (ICP) algorithm. The accuracy of this method is mostly affected by tree localization and the existence of whole trees in the scan pairs to be aligned, which is difficult to guarantee when dealing with different acquisition perspectives (e.g., ALS/TLS or UAV/BLS), offering different levels of detail or high-density forests. A method utilizing the canopy analysis [
20] applies the mean-shift approach twice to first extract the tree crowns, then searches the individual crown modes that are matched by a probability density function and aligned using the Coherent Point Drift (CPD) algorithm. The method was used to test forest plots from the ALS/TLS combinations. Brede et al. [
5] compared the RIEGL VUX-1 UAV system with TLS to derive the canopy height and Diameter at Breast Height (DBH). For the TLS data, automatic registration was performed by extracting tie points depending on the retro-reflective cylinders. Then, they applied a multi-station adjustment to enhance the registration. They obtained a standard deviation of 0.62 cm for the errors for all the tie planes. A method in Paris et al. [
22] was implemented to utilize the complementary LiDAR data coverage obtained from diverse viewpoints, specifically ALS and TLS, to accurately describe the 3D structure of individual tree crowns. They exploited correlation images of the aerial and terrestrial Canopy Height Models (CHMs) to estimate the optimum 2D rigid transform (two translations, one rotation).
5. Discussion
The LiDAR data collection in strips/multiple scans in forests is essential in most cases because of various factors, including occlusions, large-scale coverage, and more accurate reckoning of forest structure parameters. UAV-LiDAR has further advantages in forests because the data are provided in their actual geographic location by the GNSS sensor onboard the UAV platform, and its bird’s-eye-view perspective provides more details about the treetops of dense-canopy forests.
UAV-LiDAR also has advantages when compared to photogrammetry. In addition to the enriched data feature and direct 3D data acquisition, UAV-LiDAR provides more information about the near-ground level due to the LiDAR capability of canopy penetration.
Automated point cloud alignment in forests has been carried out using proven approaches. Some of these approaches depend on the geometric features and parameters of the forest (tree/stem locations, tree height, or DBH) [
21,
22,
36,
37], while others use keypoints from canopy analysis by performing mean-shift segmentation [
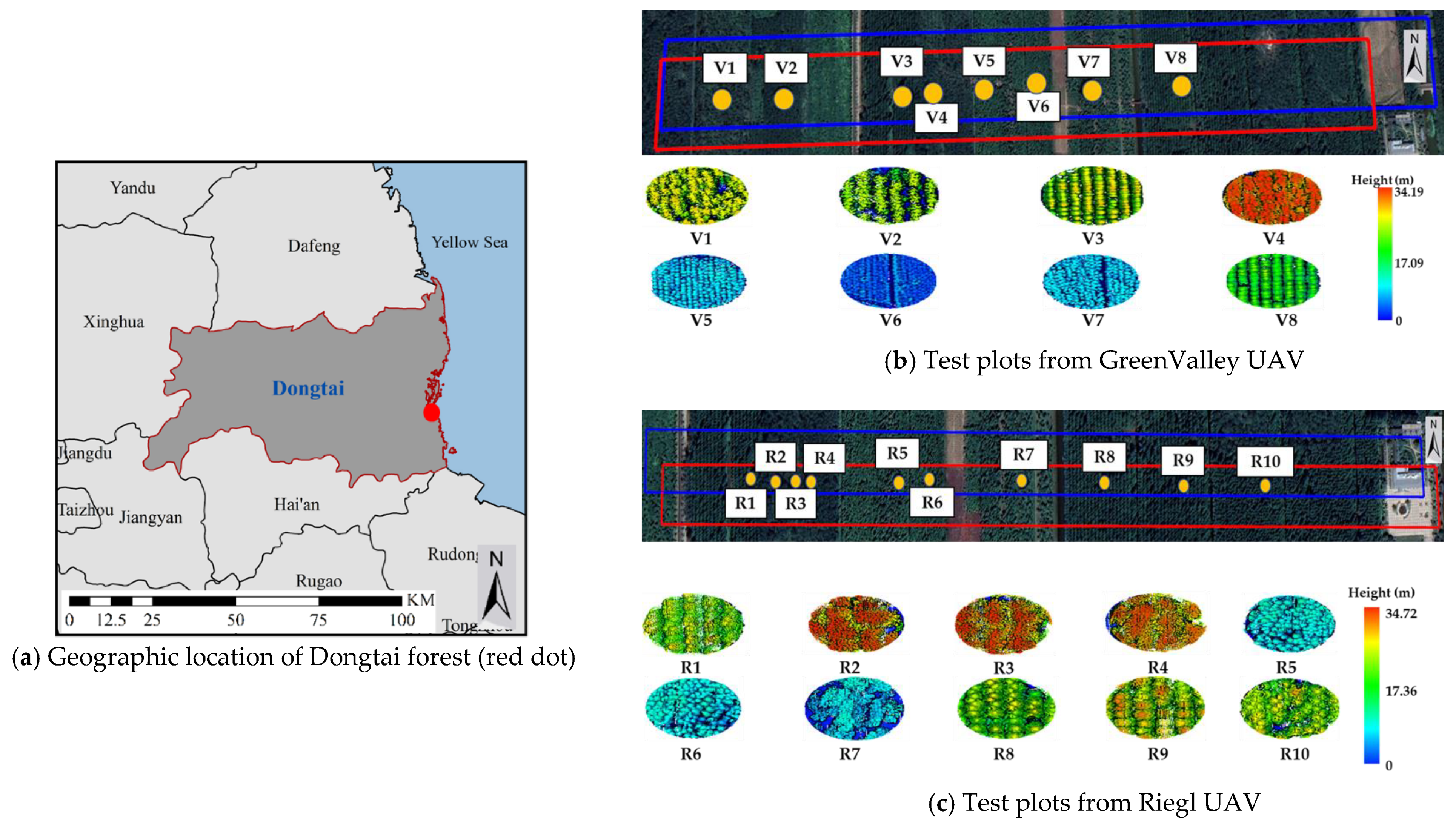
20]. Our method is similar to the methods based on canopy analysis; however, the previous methods required multi-TLS scan data for reasonable tree crown extraction. The method introduced herein does not require any forest parameters and only requires adequate canopy points. The experiments were performed on two datasets. One strip pair formed Velodyne PUK-1 (VLP-16), in which eight test plots were cropped to 50 m in diameter, representing poplar (3 plots) and dawn redwood (5 plots) tree species. The proposed method determines the rigid transformation by searching for the best pair combination from the correspondence set, based on how many inlier points will achieve distance residues within a threshold after the transformation. The reason for the need to select certain pairs for the transformation estimation is that the graph matching results still have false matches that are not detected. Therefore, the step focuses on selecting the best pairs rather than optimizing the transformation. The resulting transformation parameters may not be the optimal ones, but they are the most representative of the point set. To this end, the method (e.g., least squares) was used for our case to optimize the transformation model despite the fact that the least squares method is sensitive to outliers. The method demonstrated good performance on forest plots of both two tree species, as demonstrated by the alignment and validation results.
In a survey of the Velodyne UAV results considering the tree species, for plots V2 (deciduous), and plot V3 (conifer) with the same stem density, plot V3 has a higher matching percentage (82%) than plot V2 (55%), as well as demonstrating better matched point counts. Applying the same comparison between plots V3 and V5, plot V3 achieves much higher values because of the low tree heights of plot V5; however, both plots are conifer. This conclusion is supported by the results of plots V7 and V8, which have the same forest parameters, except that plot V8 has higher trees and, therefore, higher matching (63%).
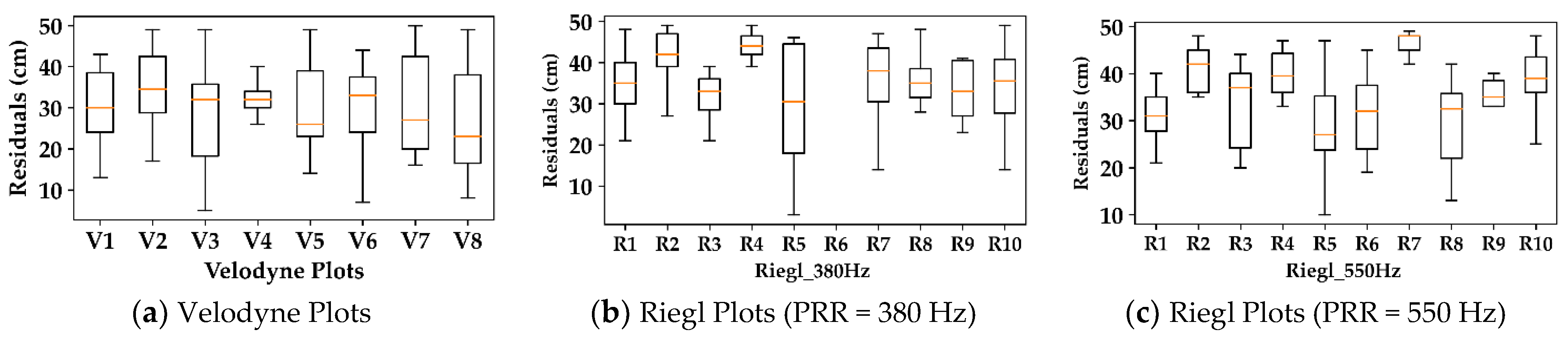
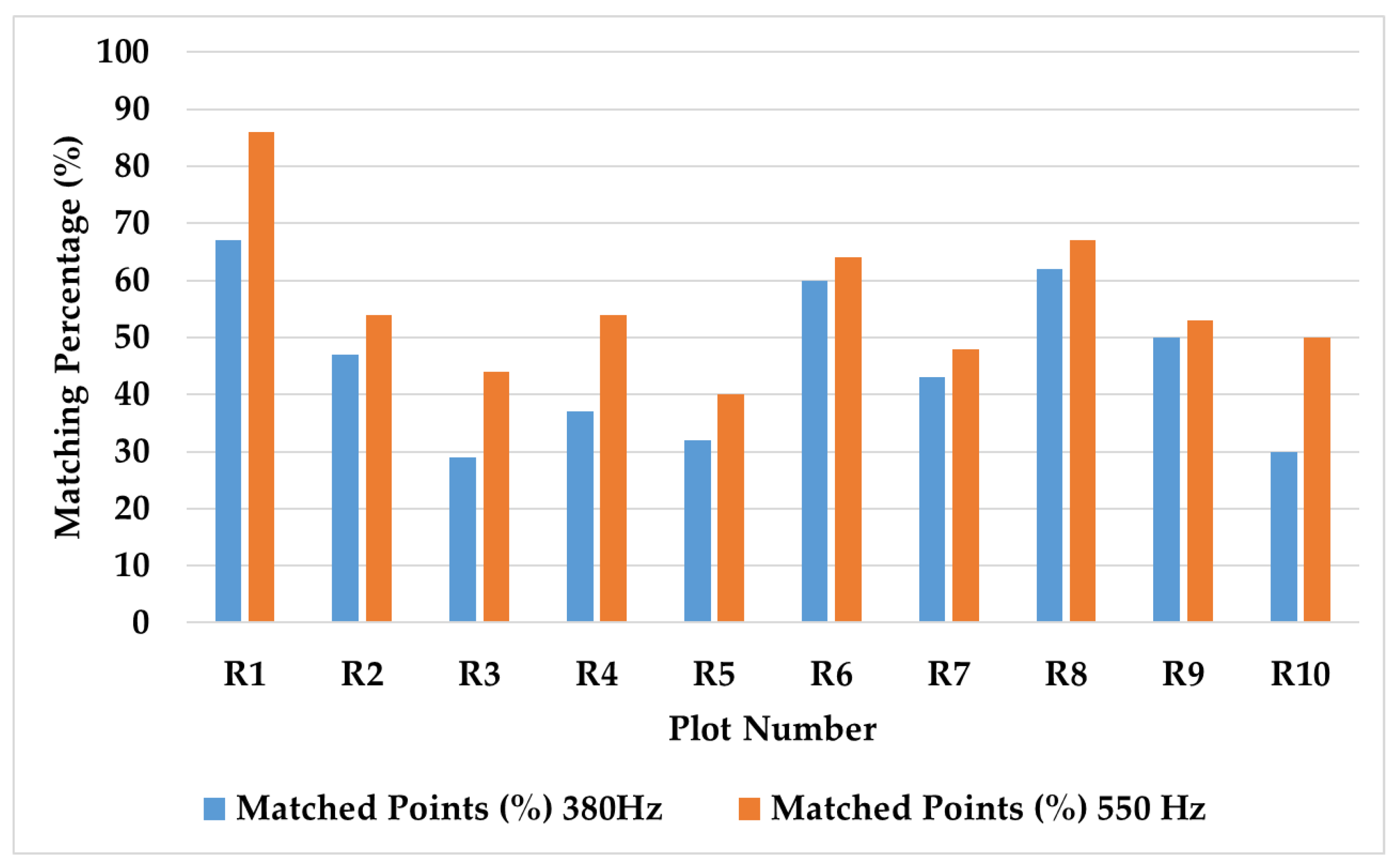
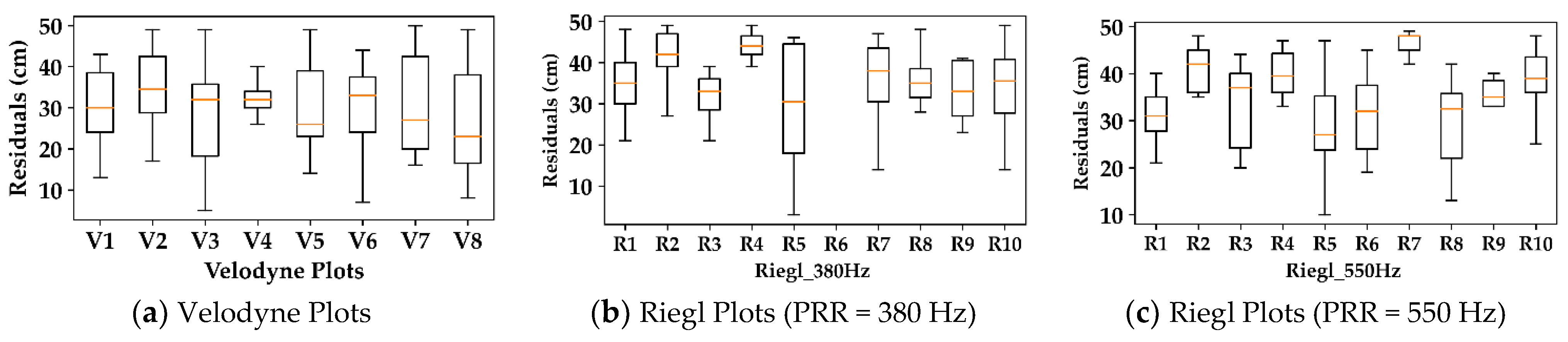
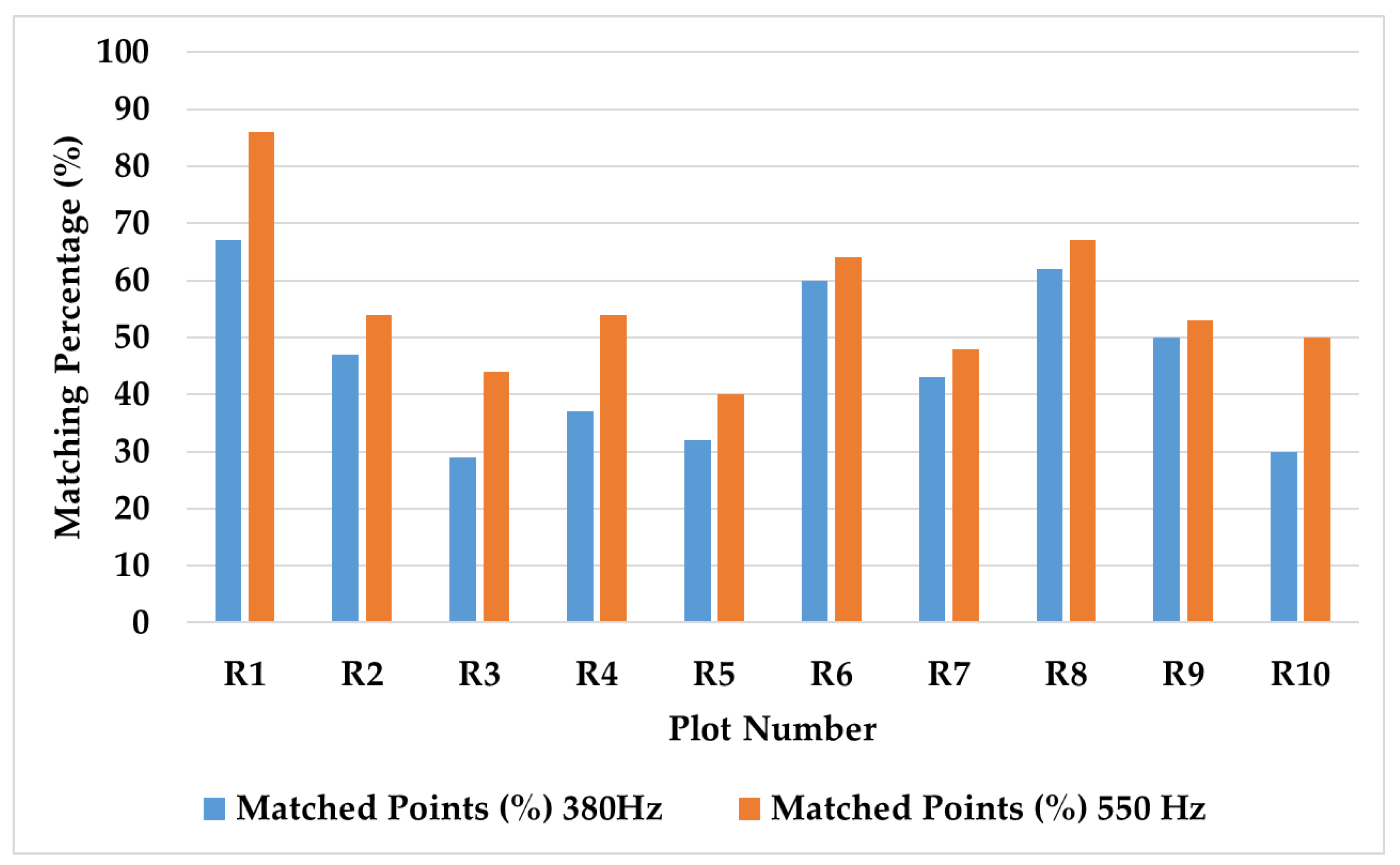
In the case of the Riegl dataset, the data are offered in two Pulse Repetition Frequencies (PRFs), enabling more analysis factors. The outcome of any tree parameter could be observed in both frequencies, as well as how much the frequency affects the results. In the context of laser waves, it is stated that the pulse energy equals the average transmitted power divided by the repetition rate, which means that the higher the PRR, the lower the pulse energy. Therefore, the PRR is a critical factor for any LiDAR sensor because it controls the point density, which is valuable for rich and detailed geoinformation extraction; however, lowering the pulse energy will result in accuracy degradation of the measured range. All the poplar plots from Riegl have the same stand density (208 tree/ha) and roughly the same tree height, except for R7, which had lower trees than the others. The matching percentages of these poplar plots at 550 Hz are consistently greater than their corresponding values at 380 Hz, as shown in
Figure 12. This can be attributed to the high point density offered by the higher frequency data because the matching percentage increased in all cases, even for the lower trees in plot R7. However, the coniferous plots deliver different forest parameters for plots R6 and R8 with the same stem density and tree species (conifer), but R6 has lower tree heights, so R6 demonstrates a lower matching than R8 in both data frequencies. In
Table 5, the mean of the 3D distance residuals at the matched points after alignment for both PRR frequencies has no significant difference, and 8 cm is the maximum difference that occurred for the coniferous plot R1, with the lowest stand density of the dawn redwood plots. This plot has relatively higher trees and a higher matching percentage over its conjugate from the 380 Hz dataset. Even though the matching percentages are consistently higher due to the point density, the resulting distance residuals at the matched points do not show a considerable improvement over those of the low frequency data, and in some cases are less accurate (e.g., test plots R6, R7, R9, and R10). The test plot R7 has a deciduous tree species with a low height of 8.6 m and stem density of 208 tree/ha. These parameters outweigh the accuracy reduction caused by the lower energy with an increasing range, along with the irregular crown shape of poplar trees. This is also supported by the results of R6 and R8 when considering the tree height difference of both, even though they have the same species (coniferous) and the same stem density. Moreover, the test plots R9 and R10 had the same stand density and relatively higher trees, and similar results were obtained for both PRFs. This implies that, although the high-frequency data have more dense points than the low-frequency data, the results are not necessarily high due to energy degradation.
From the dataset perspective and after referring to
Table 1 and
Table 2, which list the plot parameters, it is observed that the test plots V7 and R6 have the same parameters except tree height, which is not significantly different. Their matching percentages were 18% and 60% for V7 and R6, respectively. The lower tree heights (<8 m) are the cause for this large difference (42%) in matching percentage, which indicates that the higher point density in the case of the Riegl dataset reflects better matching percenatge, while the distance residuals vary within 5 cm and equal the residue for the 550 Hz data. Another case supporting this hypothesis is the relation between plots V8 and R8 with the same tree species (coniferous), stand density, and comparatively higher trees (~20 m). The matching of plot V8 equals 63%, whereas plot R8 matching percenatge is 62% and 67% for 380 Hz and 550 Hz data, respectively, without a significant variation in alignment accuracy (28 cm for V8 and 29 cm for R8), which also suggests that the higher trees have dense points due to the closeness to their scanning sensor, and consequently, the high-density point cloud has a higher matching percentage.
Furthermore, the poplar plots V4, R2, R3, and R4 have a stand density of 208 tree/ha and comparatively high trees. The matching percentage of plot V4 is 52%, whereas the plots R2, R3, and R4 have matching ranges from 29% to 47% and 44% to 54% for 380 Hz and 550 Hz data, respectively, with alignment accuracies of 31 cm for plot V4 and a maximum of 39 cm for other plots. The reduced stem density with the same tree heights with only changing the PRR (laser energy) or flight altitude (which is lower for Velodyne UAV) affect the matching percentage, and the Riegl higher frequency (550 Hz) compensates for the change in flight altitude.
Another evaluation criterion is the verification of the results on real data points (tree locations). First, tree segmentation is performed for both source and target point clouds before alignment and for the target point cloud after alignment. Then, the aligned trees are manually inspected.
Table 6 shows the results of this experiment on Velodyne LiDAR test plots.
The results are promising for both poplar and redwood forest plots. The lowest percentage of matched trees for the poplar plots is 44% and the corresponding value for the conifer plots is 50%. The percentage of matched trees for poplar plots ranges from 44% to 59% at 1m distance while the corresponding range for conifer trees plots is from 50% to 88% at the same distance threshold. Then the method achieves reliable results when evaluated with trees locations.
Comparison with Baseline
The results were compared with the baseline method [
8] which performed the ALS and terrestrial photogrammetric point cloud co-registration using features from the planimetric and vertical distances between the trees’ locations within the same forest plot. They separated the process into two stages: 2D rigid transformation (one rotation and two translations) and a vertical offset correction. The optimal 2D transformation parameters are obtained by a heuristic search over the correspondences set starting from an initial solution. This method is applied here to the tree locations of the eight plots provided from a point cloud segmentation on LiDAR360 software [
45] which segments the air-based point cloud data depending on the global maximum and the gap between neighboring trees [
46]. The comparison is performed in 2D space on the planimetric deviations at the matched points before and after alignment.
Table 7, in which the baseline method is called “object-based,” lists the comparison results in two groups: for the poplar plots, the matching percentage is increased by 3% to 8% for plots V2 and V1, respectively. The average deviation after alignment was 3–6 cm except for plot V2, which has no significant difference in the planimetric distance residual. In contrast, the conifer plots incorporate various parameters, thereby affecting the accuracy of matching and alignment.
The test plots V3 and V8 resulted in a higher matching percentage than the baseline; however, V8 has a stem density more than triple that of plot V3, and the distance residuals for both plots were clearly enhanced above 10 cm compared with the baseline method. The key factor here is tree height, as both plots have higher trees. This can be validated by the case of plots V3 and V6; however, they have equal stem density. The change in tree heights affects the tree localization accuracy as the matching percentage of the baseline method is 16%, and it is increased to 29% using our method because the intended method does not depend on tree segmentation. The baseline method achieved a better match at plot V7, but the mean of distance residuals at matched points is improved by 13 cm in our method, which can be clarified by the extremely high stand density of the plot, which accordingly affects tree localization and tree height.
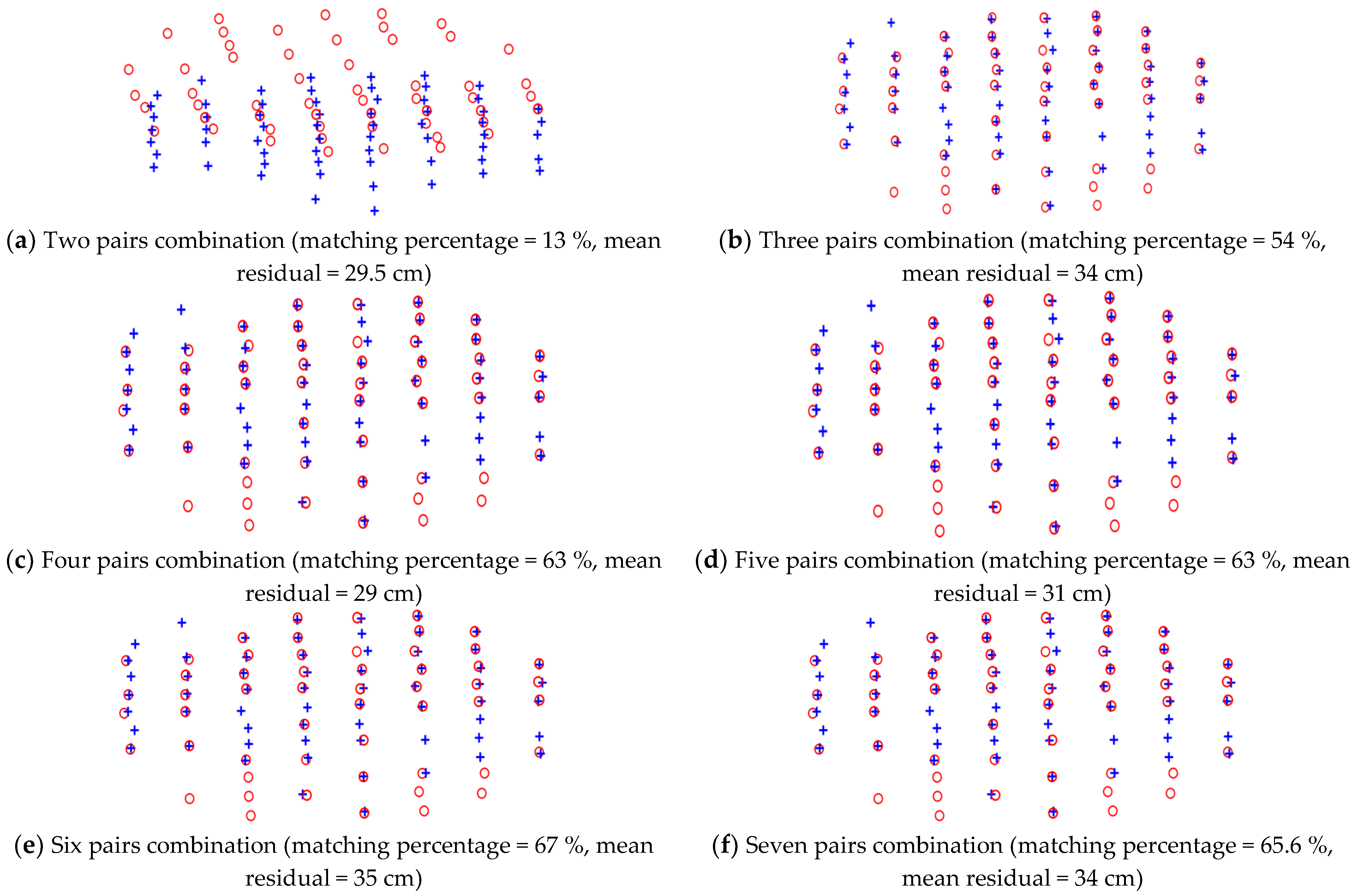
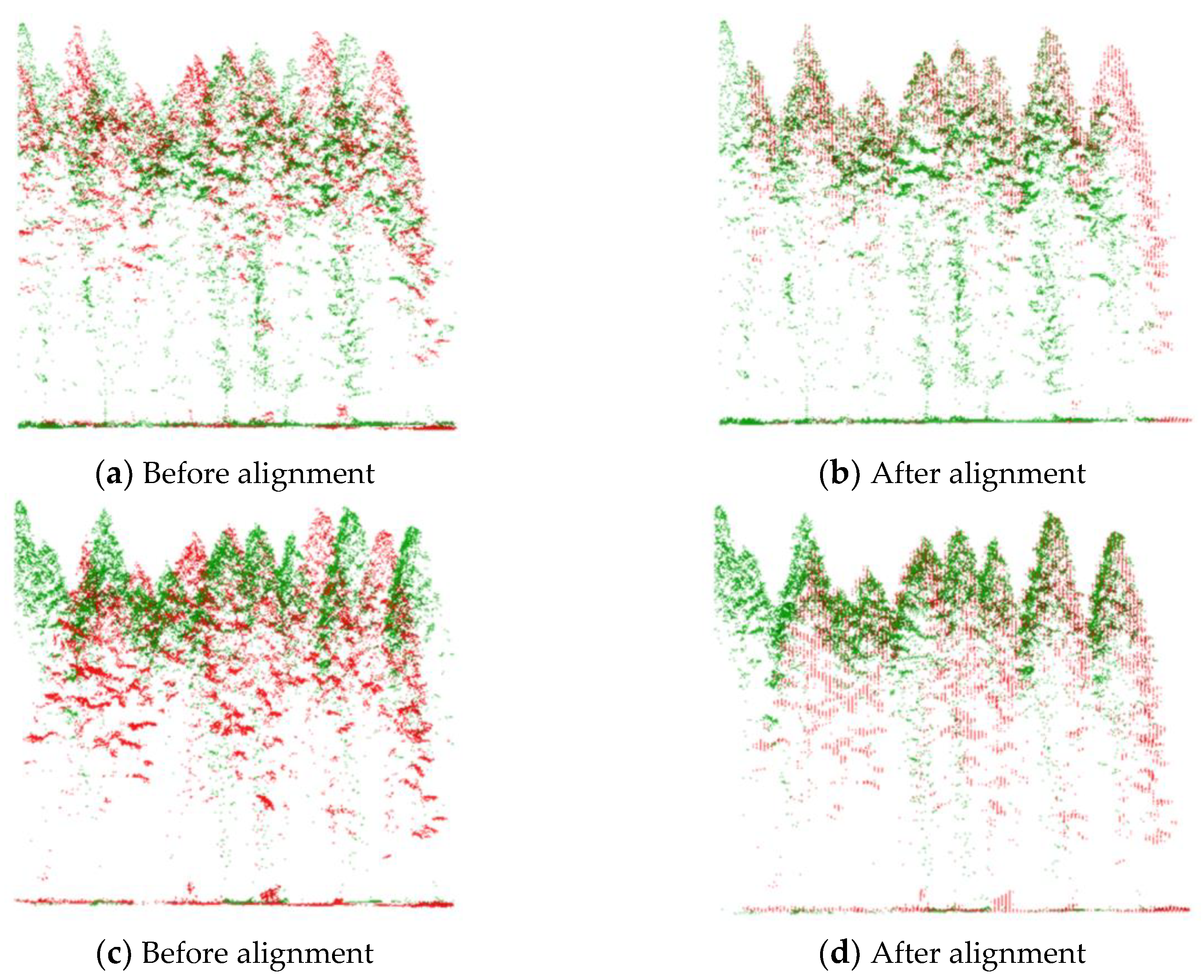
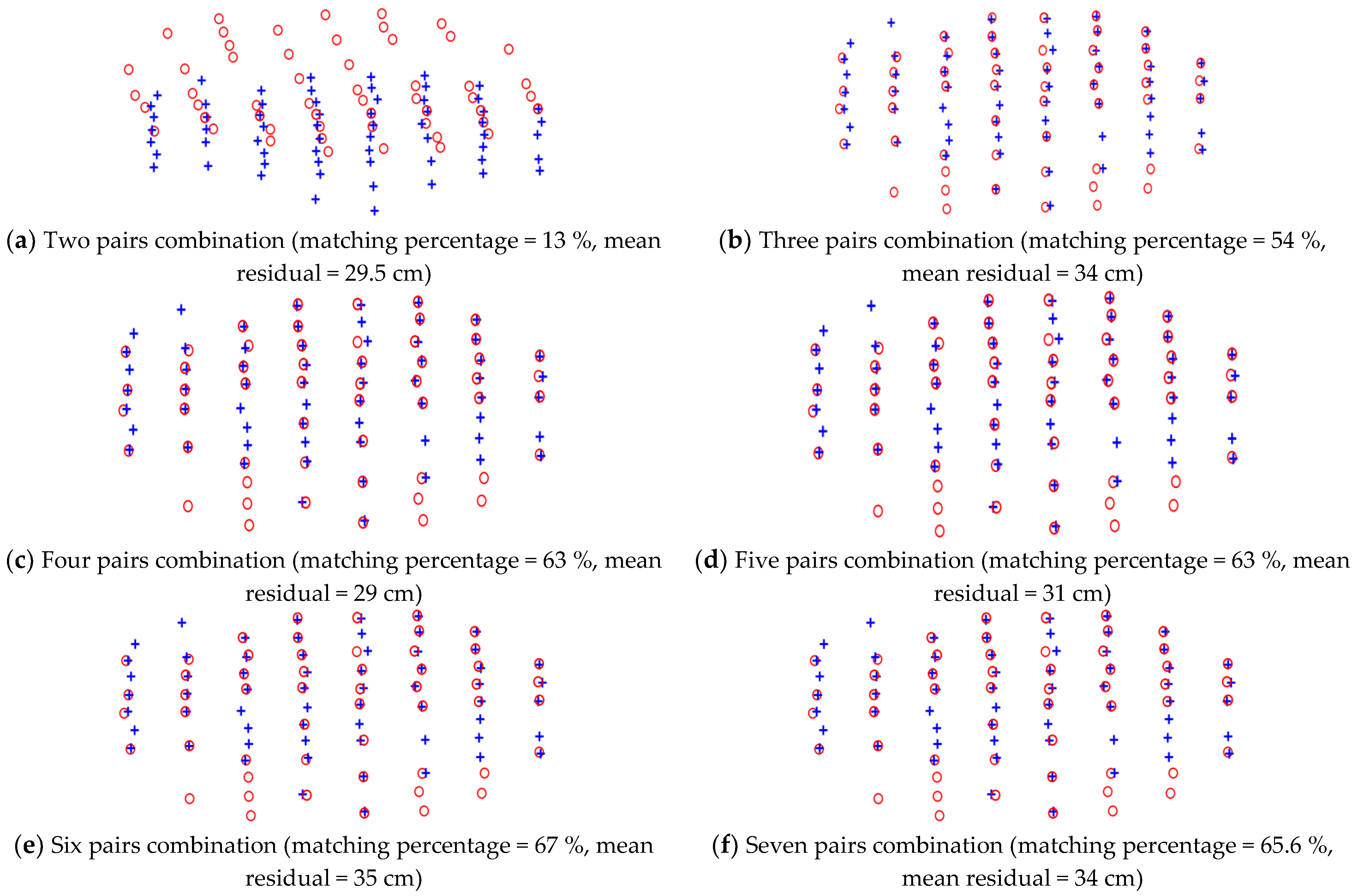
The results presented for all plots show that there are still differences between the keypoints after alignment, as shown in
Figure 8b–f). These differences reflect the performance of the proposed alignment method. The reasons for these differences include the accuracy of keypoint extraction, the matching algorithm, and the optimization of the transformation function. Strip alignment with the introduced method may not have a good performance with low-density or extremely low tree heights, where it is challenging to distinguish the canopy. The method needs to be tested against a dataset from an actual forest stand despite the large number of experiments from the planted forest introduced in this work.
6. Conclusions and Outlook
This work introduced a fully automated method for UAV strip alignment in forested areas, necessitating only the existence of the canopy cover, which is the hallmark of the LiDAR data collected by air-based platforms. Moreover, a density-based canopy clustering is performed using the HDBSCAN algorithm, which requires only one input parameter and discovers the clusters of arbitrary shapes without the need to predict the number of clusters. The main advantage of the proposed method is the ability to overcome the limitations of tree localization when working on complex forests (deciduous tree species, high stem density, and high near-ground vegetation) or windy environments. Additionally, the method performs the 3D transformation of the overlapping strips without any extra information regarding the tree parameters (e.g., tree height and DBH) or altitudes from a digital elevation model of the area using the virtual keypoints. The method was tested on eighteen circular test plots comprising poplar and dawn redwood tree species with two case studies: eight plots (50 m in diameter) cropped from Velodyne VLP-16 UAV data, whereas the remaining pairs (30 m in diameter) were picked from Riegl VUX-1 data offered in two PRFs (380 Hz and 550 Hz). The Euclidean distance discrepancies were compared before and after alignment at the matched points to evaluate the alignment results. The range of 3D deviations after alignment for the poplar plots was from 31 cm to 36 cm, whereas the same range of dawn redwood plots was from 28 cm to 31 cm in the case of Velodyne UAV plots. For the two PRFs offered by the Riegl UAV, the 3D discrepancies at the matched points after alignment were not significantly different, with the mean values at the dawn redwood plots of 33 cm and 32 cm for the 380 Hz and 550 Hz data, respectively, whereas their corresponding values were 38 cm and 39 cm for the poplar plots. The high-frequency data (550 Hz) consistently produce a higher matching percentage than the low-frequency (380 Hz) plots because of the high point density, while the 3D distance residuals after alignment are not considerably different for both frequencies. The performance of the proposed method would be poor for extremely low tree heights and/or for data with very low canopy point density, since it is mainly based on canopy clustering. Also, experiments were limited to planted forest plots where flat topography, regular forest structure, and approximately equal tree parameters are present at the plot level. However, the strip alignment of point clouds from forest plantations is more challenging than for natural forests due to the characteristics of the planted forest, which makes feature matching more complicated. Therefore, the strip alignment of point clouds from natural forests would be challenging to the proposed method due to their rough terrain, but this can be handled by height normalization using a DEM created from the point cloud itself. The diversity of tree species, shapes, and parameters in natural forest plots, which in turn provide more irregular crown shapes need to be explored by the proposed method. It would be interesting to use the proposed method in estimating more representative forest parameters, such as canopy volume and tree height, especially in the case of air-based platform co-registration or with more parameters (e.g., DBH and stem curve) in the case of multi-platform point cloud data integration.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}