
Fingerprint Positioning Method for Dual-Band Wi-Fi Based on Gaussian Process Regression and K-Nearest Neighbor


Abstract
:1. Introduction
- (1)
- In this paper, we propose a dedicated dual-band fingerprint for dual-band Wi-Fi, which is generated by the normalized values of the RSS measurements of the 2.4 and 5 GHz signals. The dual band can make full use of existing positioning information and achieve a better positioning effect than the 2.4 GHz, 5 GHz, and hybrid fingerprints. The function of the normalization algorithm is to eliminate the metrics of the RSS measurements to avoid their influence on the value calculation.
- (2)
- A model construction method is used to build the positioning model of each dual-band fingerprint in this paper. In the proposed method, based on the GPR algorithm and neighborhood fingerprints, the positioning model of the dual-band fingerprint can be constructed. The proposed model construction method can avoid the decreases in the positioning model’s precision as the positioning area increases.
- (3)
- We propose a two-step positioning strategy considering the calculation amount and positioning effect. First, the 5 GHz fingerprint is used to solve a relatively high-precision initial position due to the better stability of the 5 GHz signal than the 2.4 GHz signal, and KNN with low complexity is chosen as the positioning algorithm. Then, the optimal positioning model can be chosen based on the initial position, which is employed to ensure a more accurate position.
2. Related Work
3. Algorithm
3.1. Normalization Algorithm
3.2. KNN Algorithm
3.3. GPR Algorithm
3.4. Rank Algorithm
3.5. Coverage-Area Algorithm
4. The Proposed Method
4.1. Stability Analysis of RSS Measurements of Dual-Band Wi-Fi
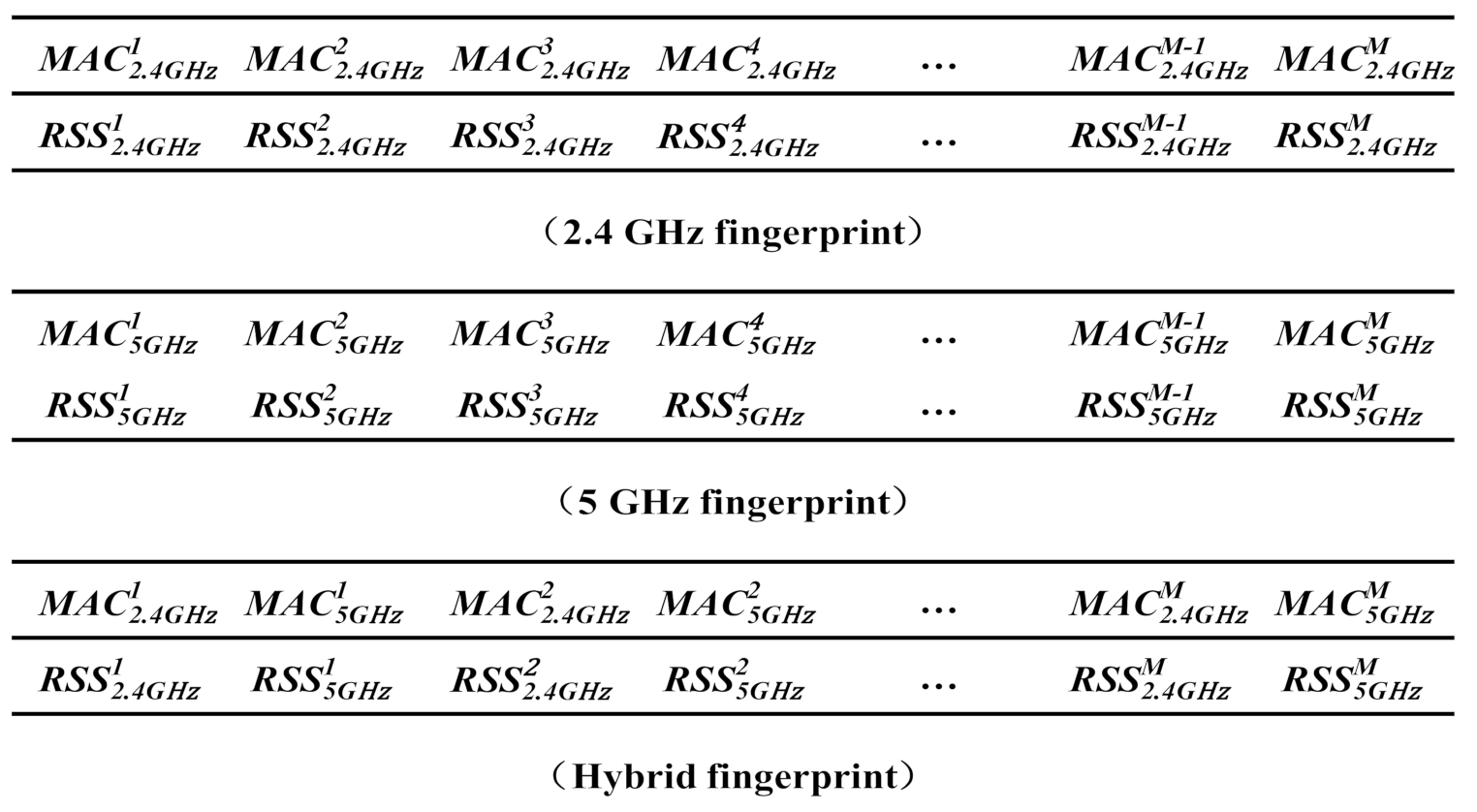
4.2. The Traditional Fingerprint
4.3. The Proposed Dual-Band Fingerprint
4.4. Overview of the Proposed Method
5. Experimental Analysis
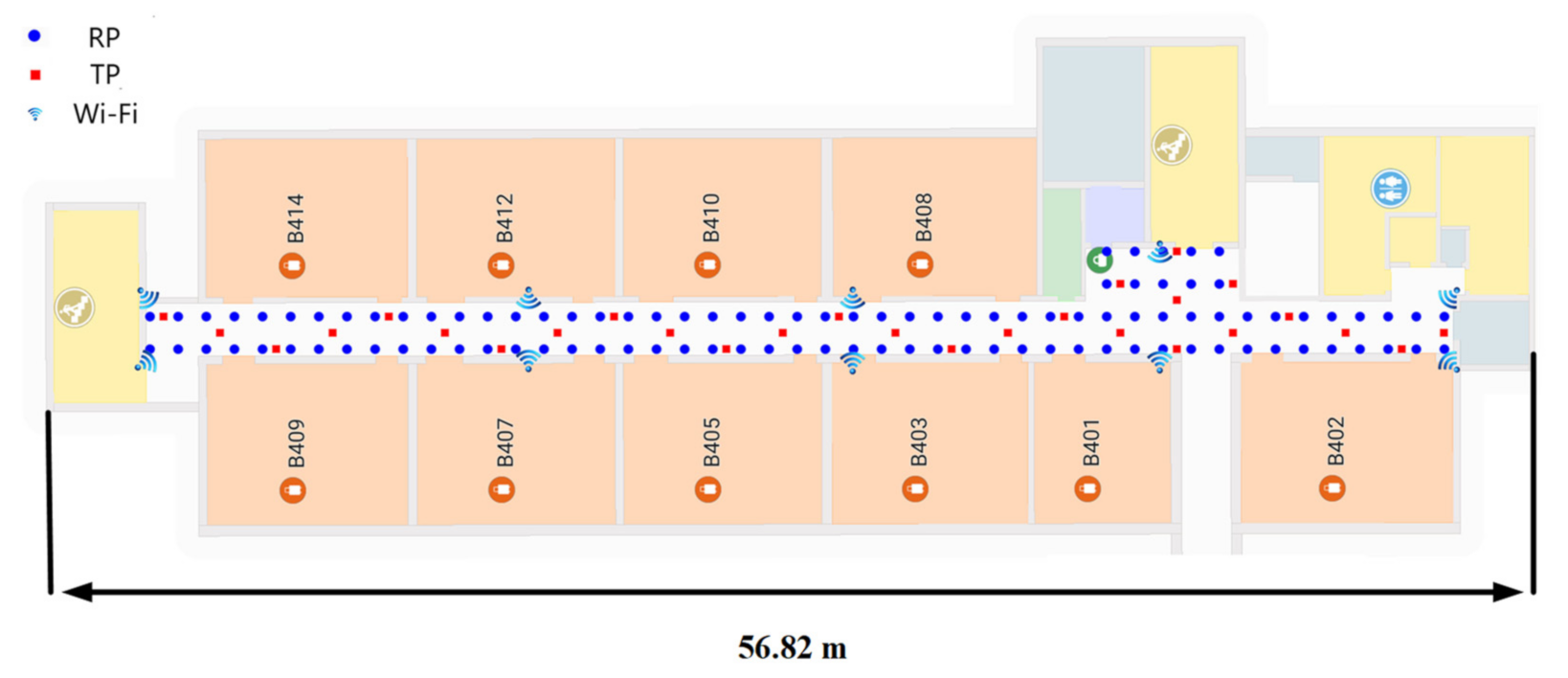
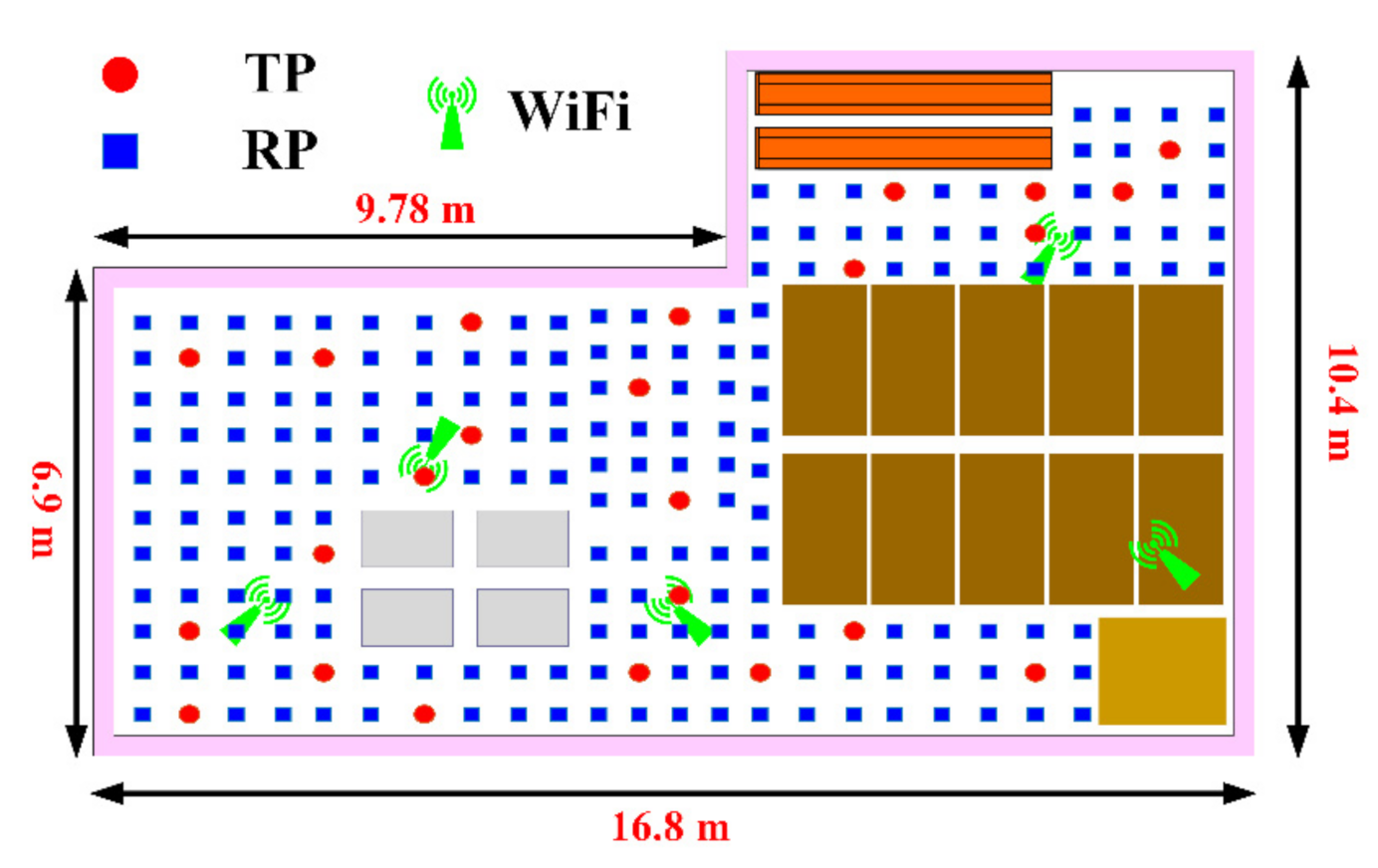
5.1. Experimental Environment
5.2. Experimental Description
5.3. Comparison of Model Precision
5.4. Positioning Effect of the 2.4 GHz, 5 GHz, Hybrid, and Dual-Band Fingerprints in Scenario A
5.5. Positioning Effect of the 2.4 GHz, 5 GHz, Hybrid, and Dual-Band Fingerprints in Scenario B
5.6. Positioning Effect of the Proposed Method in Two Scenarios
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ardiansyah, A.; Nugraha, G.D.; Han, H.; Deokjai, C.; Kim, J. A decision tree-based NLOS detection method for the UWB indoor location tracking accuracy improvement. Int. J. Commun. Syst. 2019, 32, e3997. [Google Scholar]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kröger, T.; Chen, R. Bayesian Fusion for Indoor Positioning Using Bluetooth Fingerprints. Wirel. Pers. Commun. 2012, 70, 1735–1745. [Google Scholar] [CrossRef]
- Topak, F.; Pekeriçli, M.K.; Tanyer, A.M. Technological Viability Assessment of Bluetooth Low Energy Technology for Indoor Localization. J. Comput. Civ. Eng. 2018, 32, 04018034. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of fingerprints for indoor WiFi localization based on Gaussian process regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Oh, J.; Kim, J. Adaptive K-nearest neighbour algorithm for WiFi fingerprint positioning. ICT Express 2018, 4, 91–94. [Google Scholar] [CrossRef]
- Zhang, W.; Hua, X.; Yu, K.; Qiu, W.; Zhang, S.; He, X. A novel WiFi indoor positioning strategy based on weighted squared Euclidean distance and local principal gradient direction. Sens. Rev. 2018, 39. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, S.; Li, R.; Guo, D.; Wei, Y.; Sun, Y. WiFi fingerprint positioning based on clustering in mobile crowdsourcing system. In Proceedings of the 2017 12th International Conference on Computer Science and Education (ICCSE), Houston, TX, USA, 22–25 August 2017; pp. 252–256. [Google Scholar]
- Guo, X.; Li, L.; Ansari, N.; Liao, B. Accurate WiFi Localization by Fusing a Group of Fingerprints via a Global Fusion Profile. IEEE Trans. Veh. Technol. 2018, 67, 7314–7325. [Google Scholar] [CrossRef]
- Tewolde, G.S.; Kwon, J. Efficient WiFi-Based Indoor Localization Using Particle Swarm Optimization. In Proceedings of the Advances in Swarm Intelligence, Chongqing, China, 12–15 June 2011; pp. 203–211. [Google Scholar]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID indoor positioning algorithm based on Bayesian probability and K-nearest neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, A.; Ruizhi, C.; Deren, L.; Yujin, C.; Dewen, W. An Indoor Positioning System Based on Static Objects in Large Indoor Scenes by Using Smartphone Cameras. Sensors 2018, 18, 2229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khyam, M.O.; Noor-A-Rahim, M.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of Chirp Waveforms for Multiple-Access Ultrasonic Indoor Positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Shi, J. An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors 2018, 18, 1458. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhang, P.; Huang, G.; Zhang, Q.; Zhao, Q. Performance analysis of indoor pseudolite positioning based on the unscented Kalman filter. GPS Solut. 2019, 23, 79. [Google Scholar] [CrossRef]
- Ma, Y.; Dou, Z.; Jiang, Q.; Hou, Z. Basmag: An Optimized HMM-Based Localization System Using Backward Sequences Matching Algorithm Exploiting Geomagnetic Information. IEEE Sens. J. 2016, 16, 7472–7482. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Bin Zikria, Y.; Park, Y. Ensembling Neural Networks for User’s Indoor Localization Using Magnetic Field Data from Smartphones. Comput. Mater. Contin. 2021, 68, 2597–2620. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Li, X.; Cao, H.; Qi, H.; Wang, Y. A novel method of adaptive weighted K-nearest neighbor fingerprint indoor positioning considering user’s orientation. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718785885. [Google Scholar] [CrossRef]
- Wu, G.; Tseng, P. A Deep Neural Network-Based Indoor Positioning Method using Channel State Information. In Proceedings of the 2018 International Conference on Computing, Networking and Communications (ICNC), Maui, HI, USA, 5–8 March 2018; pp. 290–294. [Google Scholar]
- Wang, P.; Luo, Y. Research on WiFi Indoor Location Algorithm Based on RSSI Ranging. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 1694–1698. [Google Scholar]
- Fang, X.; Jiang, Z.; Nan, L.; Chen, L. Optimal weighted K-nearest neighbour algorithm for wireless sensor network fingerprint localisation in noisy environment. IET Commun. 2018, 12, 1171–1177. [Google Scholar] [CrossRef]
- Sharp, I.; Yu, K. Enhanced Least-Squares Positioning Algorithm for Indoor Positioning. IEEE Trans. Mob. Comput. 2013, 12, 1640–1650. [Google Scholar] [CrossRef]
- Zhuang, Y.; Syed, Z.; Li, Y.; El-Sheimy, N. Evaluation of Two WiFi Positioning Systems Based on Autonomous Crowdsourcing of Handheld Devices for Indoor Navigation. IEEE Trans. Mob. Comput. 2016, 15, 1982–1995. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An Improved K-Nearest-Neighbor Indoor Localization Method Based on Spearman Distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Bi, J.; Wang, Y.; Li, X.; Qi, H.; Cao, H.; Xu, S. An adaptive weighted KNN positioning method based on omnidirectional fingerprint database and twice affinity propagation clustering. Sensors 2018, 18, 2502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beomju, S.; Jung Ho, L.; Taikjin, L.; Hyung Seok, K. Enhanced weighted K-nearest neighbor algorithm for indoor Wi-Fi positioning systems. In Proceedings of the 2012 8th International Conference on Computing Technology and Information Management (NCM and ICNIT), Seoul, Korea, 24–26 April 2012; pp. 574–577. [Google Scholar]
- Song, X.; Fan, X.; Xiang, C.; Ye, Q.; Liu, L.; Wang, Z.; He, X.; Yang, N.; Fang, G. A novel convolutional neural network based indoor localization framework with WiFi fingerprinting. IEEE Access 2019, 7, 110698–110709. [Google Scholar] [CrossRef]
- Yiu, S.; Yang, K. Gaussian process assisted fingerprinting localization. IEEE Internet Things J. 2015, 3, 683–690. [Google Scholar] [CrossRef]
- Youssef, M.; Agrawala, A. The Horus location determination system. Wirel. Netw. 2008, 14, 357–374. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Moreira, A.; Knauth, S.; Berkvens, R.; Montoliu, R.; Belmonte, O.; Trilles, S.; João Nicolau, M.; Meneses, F.; Costa, A.; et al. A realistic evaluation of indoor positioning systems based on Wi-Fi fingerprinting: The 2015 EvAAL–ETRI competition. J. Ambient. Intell. Smart Environ. 2017, 9, 263–279. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.U.; Hur, S.; Park, S.; Park, Y. Harvesting Indoor Positioning Accuracy by Exploring Multiple Features From Received Signal Strength Vector. IEEE Access 2019, 7, 52110–52121. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, D.; Wang, Y. An Indoor Passive Positioning Method Using CSI Fingerprint Based on Adaboost. IEEE Sens. J. 2019, 19, 5792–5800. [Google Scholar] [CrossRef]
- Ashraf, I.; Hur, S.; Park, Y. Indoor Positioning on Disparate Commercial Smartphones Using Wi-Fi Access Points Coverage Area. Sensors 2019, 19, 4351. [Google Scholar] [CrossRef] [Green Version]
- Lohan, E.S.; Torres-Sospedra, J.; Leppäkoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data 2017, 2, 32. [Google Scholar] [CrossRef] [Green Version]
- Farshad, A.; Jiwei, L.; Marina, M.K.; Garcia, F.J. A microscopic look at WiFi fingerprinting for indoor mobile phone localization in diverse environments. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Yu, F.; Jiang, M.; Liang, J.; Qin, X.; Hu, M.; Tao, P.; Hu, X. 5G WiFi Signal-Based Indoor Localization System Using Cluster -Nearest Neighbor Algorithm. Int. J. Distrib. Sens. Netw. 2014, 10, 247525. [Google Scholar] [CrossRef] [Green Version]
- Karlsson, F.; Karlsson, M.; Bernhardsson, B.; Tufvesson, F.; Persson, M. Sensor fused indoor positioning using dual band WiFi signal measurements. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 1669–1672. [Google Scholar]
- Feng, Y.; Jiang, M.; Jing, L.; Xiao, Q.; Hu, X. Expansion RSS-based Indoor Localization Using 5G WiFi Signal. In Proceedings of the 2014 International Conference on Computational Intelligence and Communication Networks (CICN), Bhopal, India, 14–16 November 2014. [Google Scholar]
- Own, C.M.; Hou, J.; Tao, W. Signal Fuse Learning Method with Dual Bands WiFi Signal Measurements in Indoor Positioning. IEEE Access 2019, 7, 131805–131817. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fingerprint | ME | RMSE |
|---|---|---|
| 2.4 GHz fingerprint | 2.318 | 2.793 |
| 5 GHz fingerprint | 2.509 | 3.011 |
| Hybrid fingerprint | 2.238 | 2.922 |
| Dual-band fingerprint | 2.020 | 2.404 |
| Fingerprint | ME | RMSE |
|---|---|---|
| 2.4 GHz fingerprint | 2.366 | 2.589 |
| 5 GHz fingerprint | 2.352 | 2.559 |
| Hybrid fingerprint | 2.120 | 2.392 |
| Dual-band fingerprint | 1.896 | 2.154 |
| Method | 50% | 70% | 90% | ME | RMSE |
|---|---|---|---|---|---|
| KNN | 1.393 | 2.220 | 3.042 | 1.803 | 2.262 |
| Rank | 2.425 | 4.573 | 7.328 | 3.651 | 4.876 |
| Coverage-area | 2.179 | 3.900 | 6.294 | 3.159 | 3.837 |
| GPR | 1.631 | 2.311 | 3.562 | 2.020 | 2.404 |
| Proposed method | 0.748 | 1.423 | 2.008 | 1.067 | 1.331 |
| Method | 50% | 70% | 90% | ME | RMSE |
|---|---|---|---|---|---|
| KNN | 1.504 | 1.876 | 3.204 | 1.896 | 2.153 |
| Rank | 2.453 | 2.608 | 5.042 | 2.808 | 3.337 |
| Coverage-area | 3.023 | 4.808 | 5.760 | 3.613 | 4.047 |
| GPR | 1.542 | 2.354 | 3.551 | 1.981 | 2.291 |
| Proposed method | 1.037 | 1.432 | 2.249 | 1.432 | 1.712 |
| Method | ME | RMSE |
|---|---|---|
| KNN | 2.278 | 2.677 |
| Rank | 3.262 | 4.235 |
| Coverage-area | 3.369 | 3.936 |
| GPR | 2.002 | 2.353 |
| Proposed method | 1.236 | 1.519 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Wang, Y.; Bi, J.; Sun, M.; Qi, H.; Xu, S. Fingerprint Positioning Method for Dual-Band Wi-Fi Based on Gaussian Process Regression and K-Nearest Neighbor. ISPRS Int. J. Geo-Inf. 2021, 10, 706. https://doi.org/10.3390/ijgi10100706
Cao H, Wang Y, Bi J, Sun M, Qi H, Xu S. Fingerprint Positioning Method for Dual-Band Wi-Fi Based on Gaussian Process Regression and K-Nearest Neighbor. ISPRS International Journal of Geo-Information. 2021; 10(10):706. https://doi.org/10.3390/ijgi10100706
Chicago/Turabian StyleCao, Hongji, Yunjia Wang, Jingxue Bi, Meng Sun, Hongxia Qi, and Shenglei Xu. 2021. "Fingerprint Positioning Method for Dual-Band Wi-Fi Based on Gaussian Process Regression and K-Nearest Neighbor" ISPRS International Journal of Geo-Information 10, no. 10: 706. https://doi.org/10.3390/ijgi10100706
APA StyleCao, H., Wang, Y., Bi, J., Sun, M., Qi, H., & Xu, S. (2021). Fingerprint Positioning Method for Dual-Band Wi-Fi Based on Gaussian Process Regression and K-Nearest Neighbor. ISPRS International Journal of Geo-Information, 10(10), 706. https://doi.org/10.3390/ijgi10100706