
Towards Managing Visual Pollution: A 3D Isovist and Voxel Approach to Advertisement Billboard Visual Impact Assessment


Abstract
:1. Introduction
Defining Visual Pollution as Landsacpe’s Quality Issue
2. Literature Review and a Resulting View Volume Concept
2.1. The Impact of VP on Landscape Openness
2.2. The Advantages and Limitations of 3D-GIS Visibility in Landscape Studies
2.3. The View Volume Concept
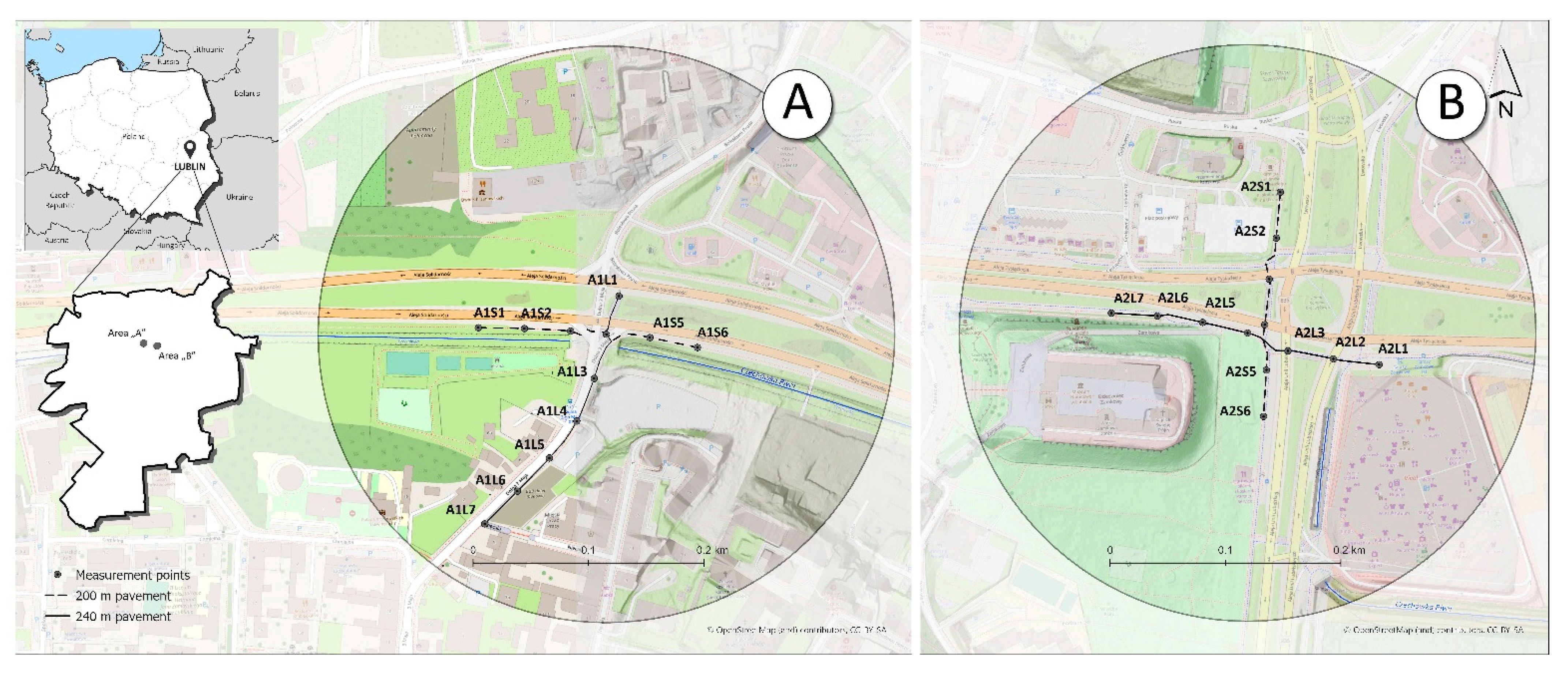
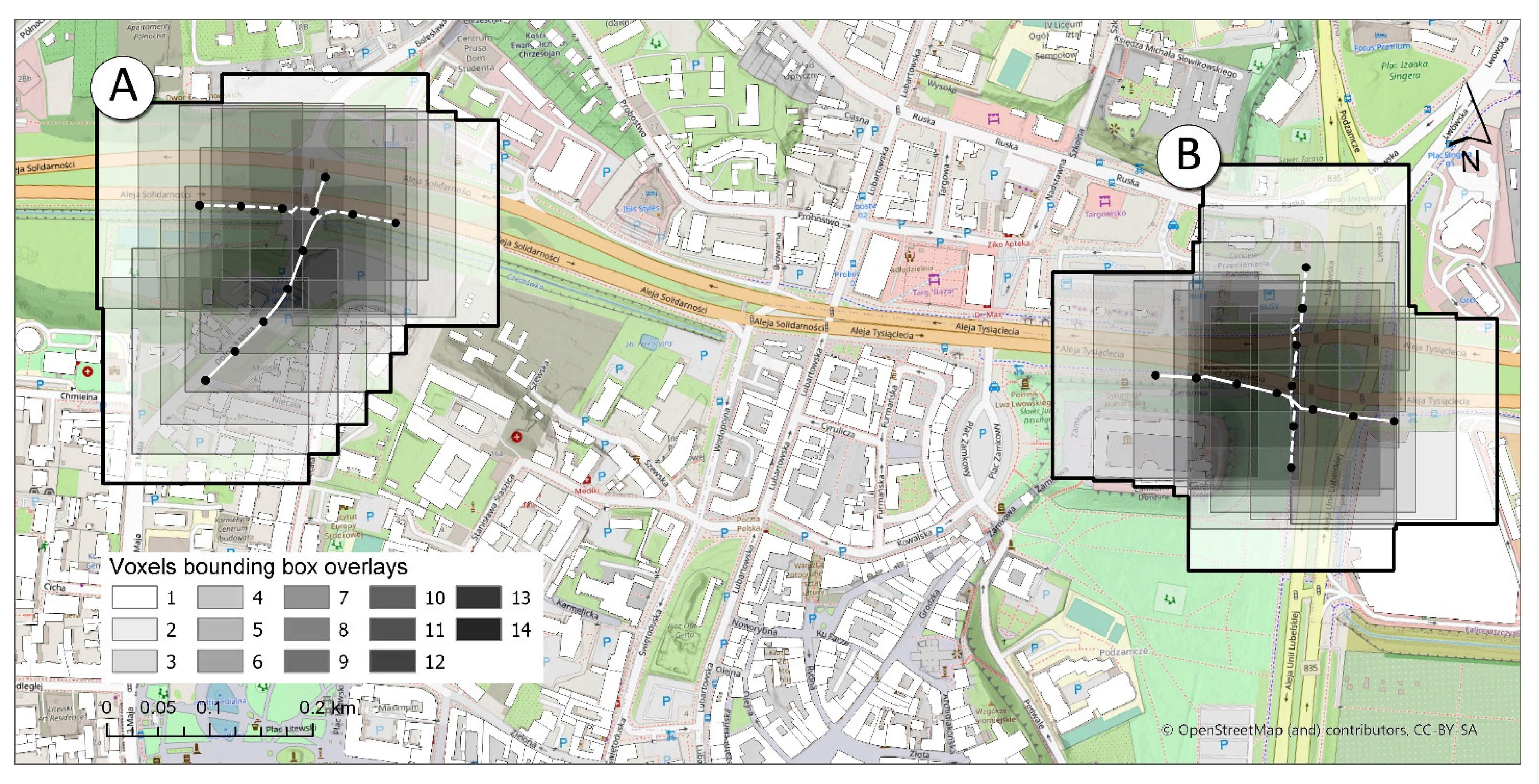
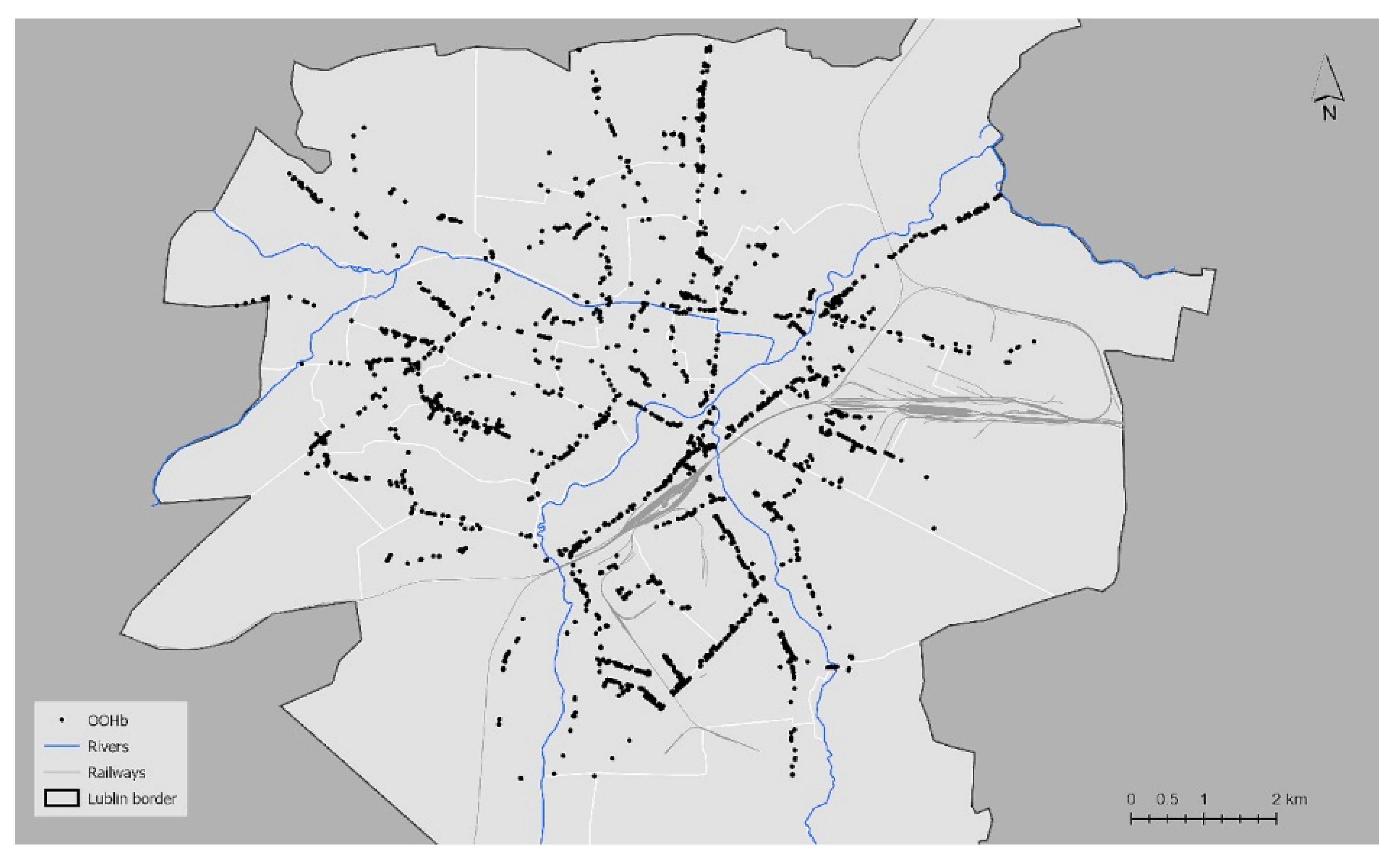
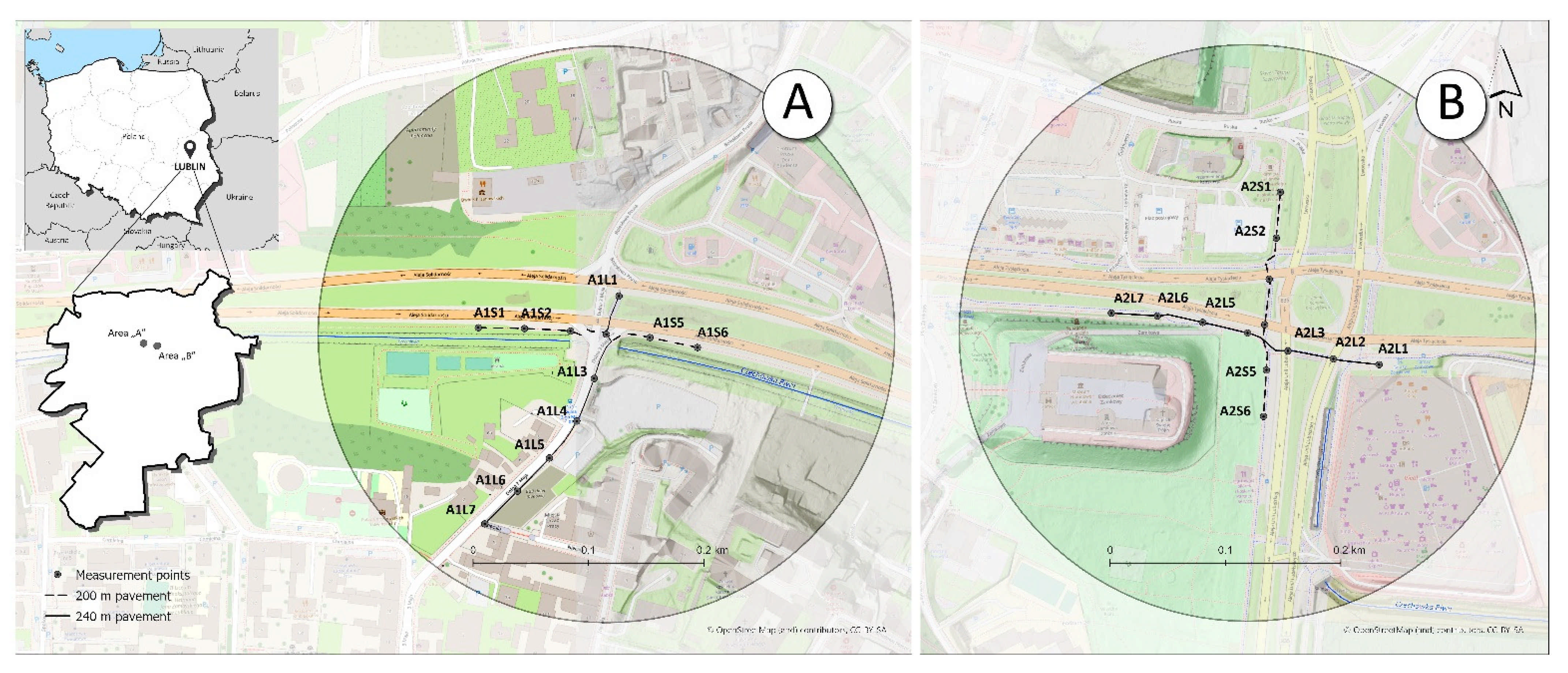
3. Case Study
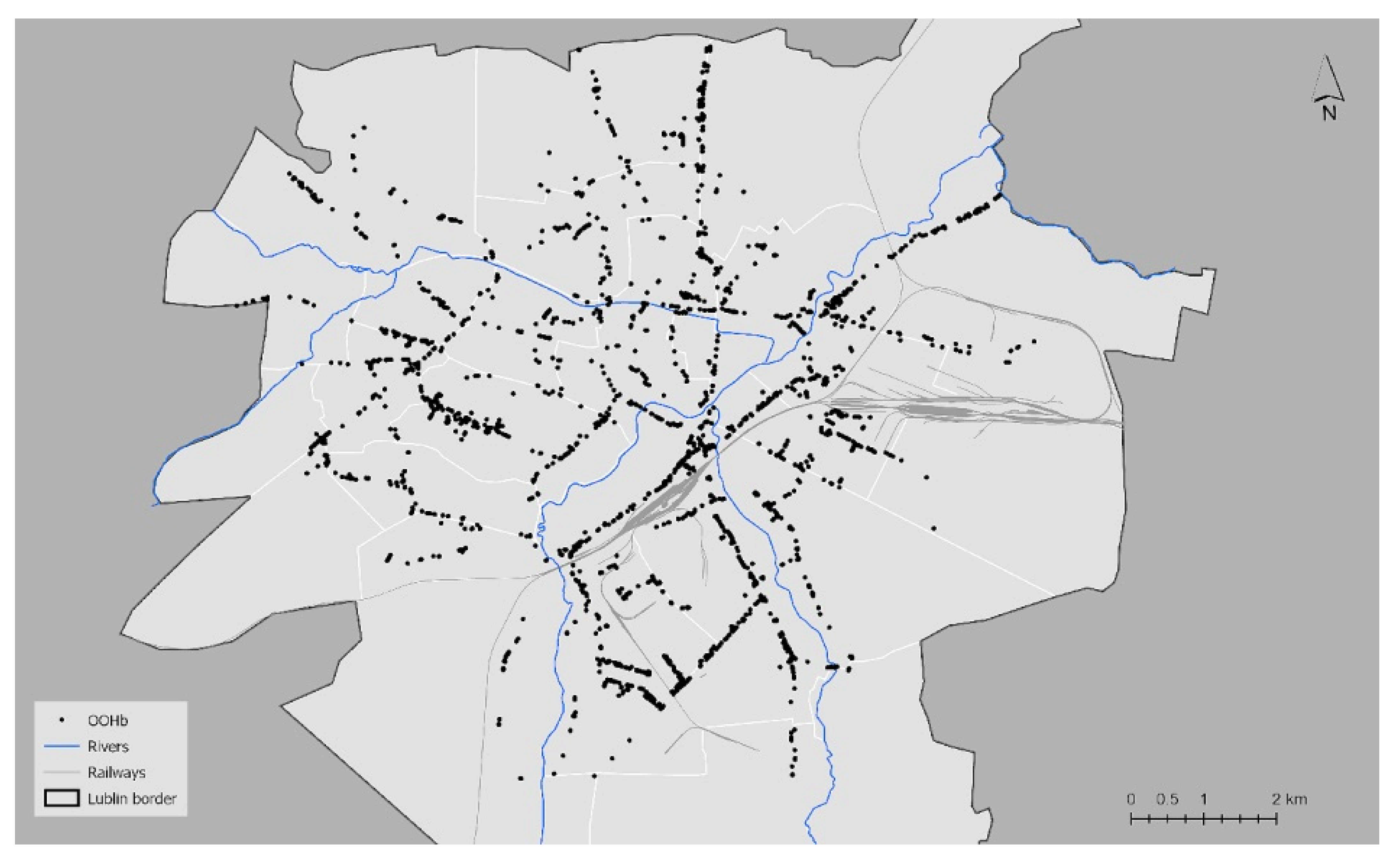
- Presence of the OOHb infrastructure among other forms of outdoor advertising
- Heavy pedestrian traffic—herein, the visual impact of OOHb infrastructure is being considered from a pedestrian observer perspective, and the window view is not the object of analysis (e.g., car drivers, house dwellers)
- A relatively isolated OOHb spot—to avoid the spillover effect of neighbour advertisement media.
- Non-flat area—to demonstrate the usability of the method at various topography conditions.
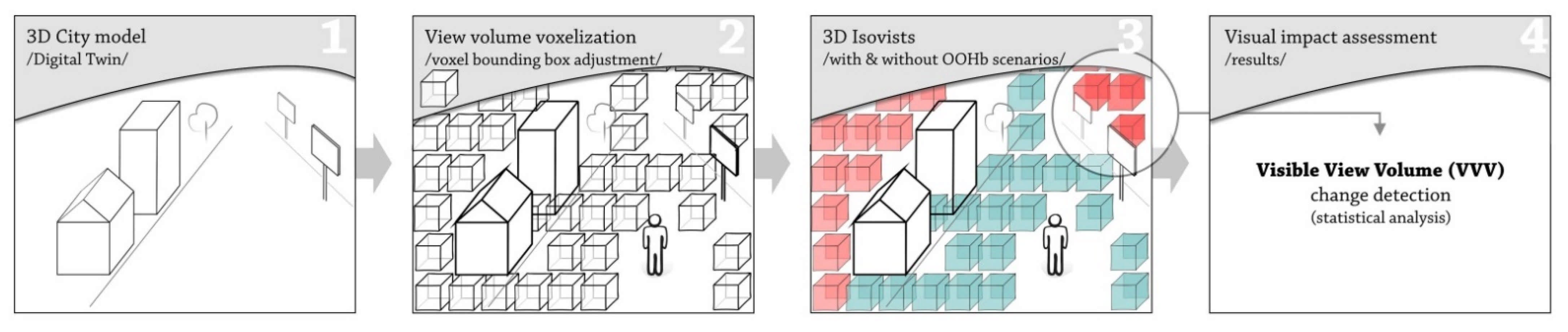
4. Method Section
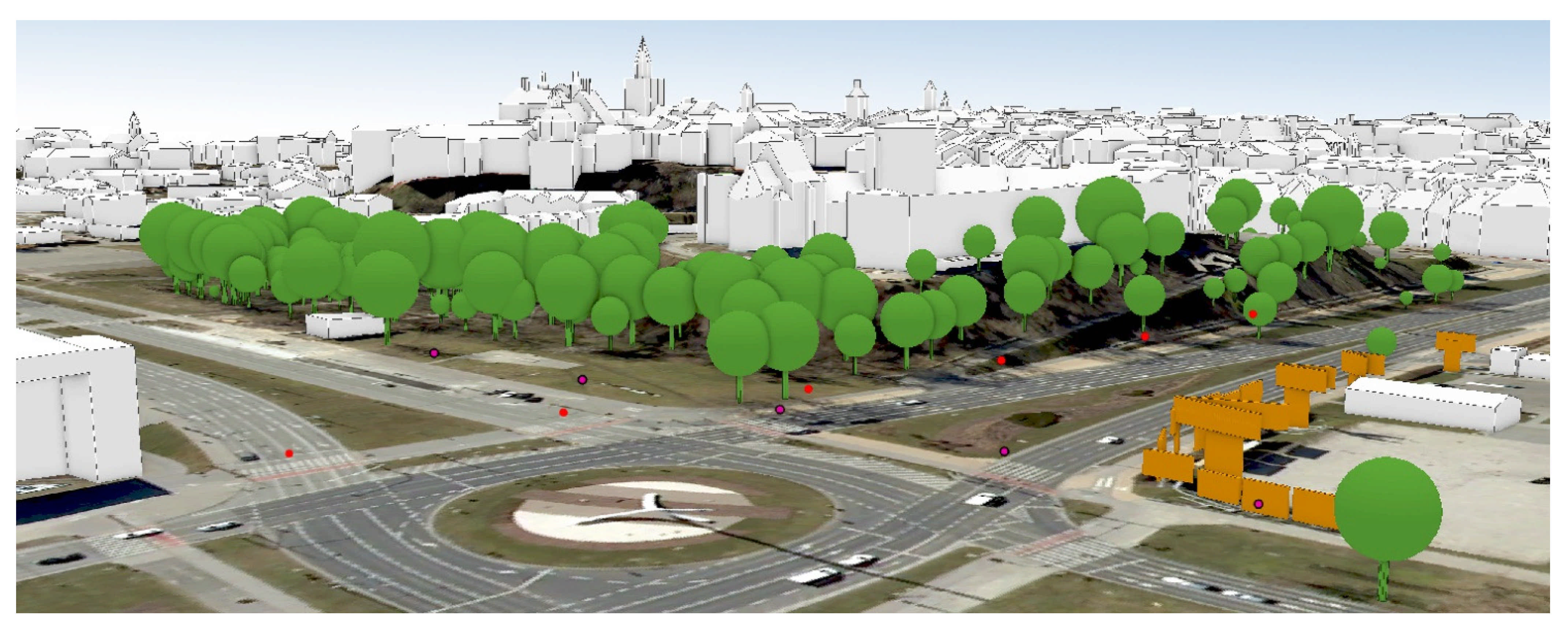
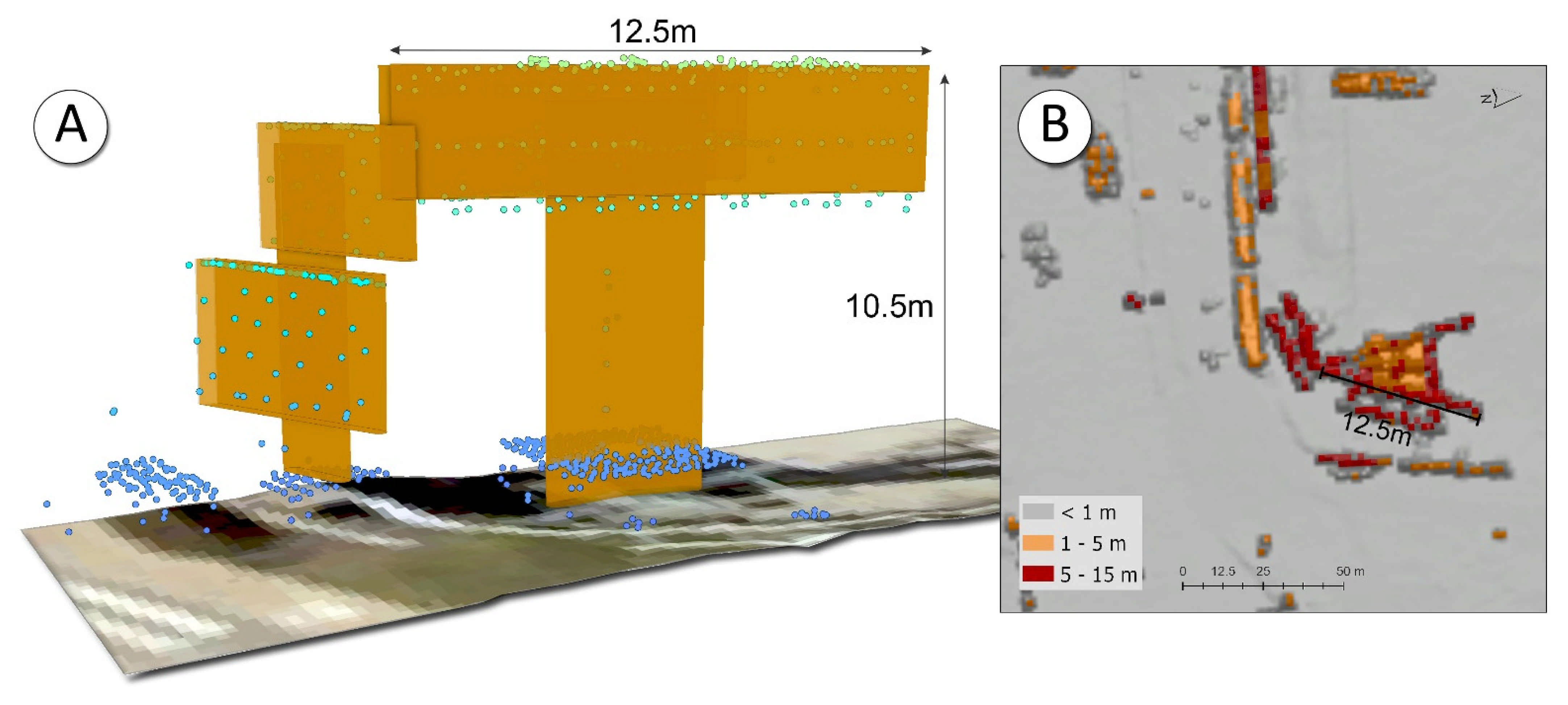
4.1. The Method of 3D City Model Creation
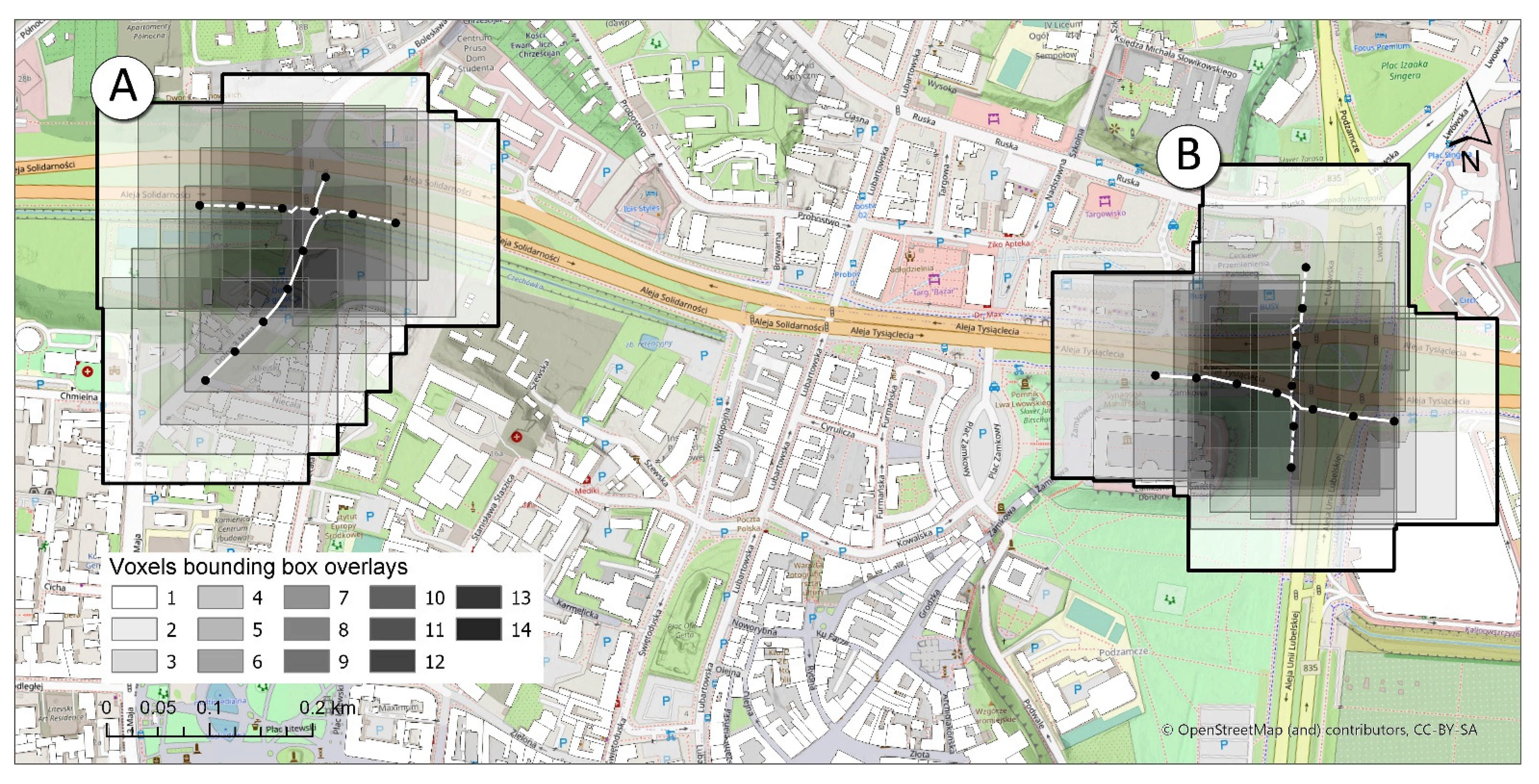
4.2. Filling Up the Bounding Box with the Voxels
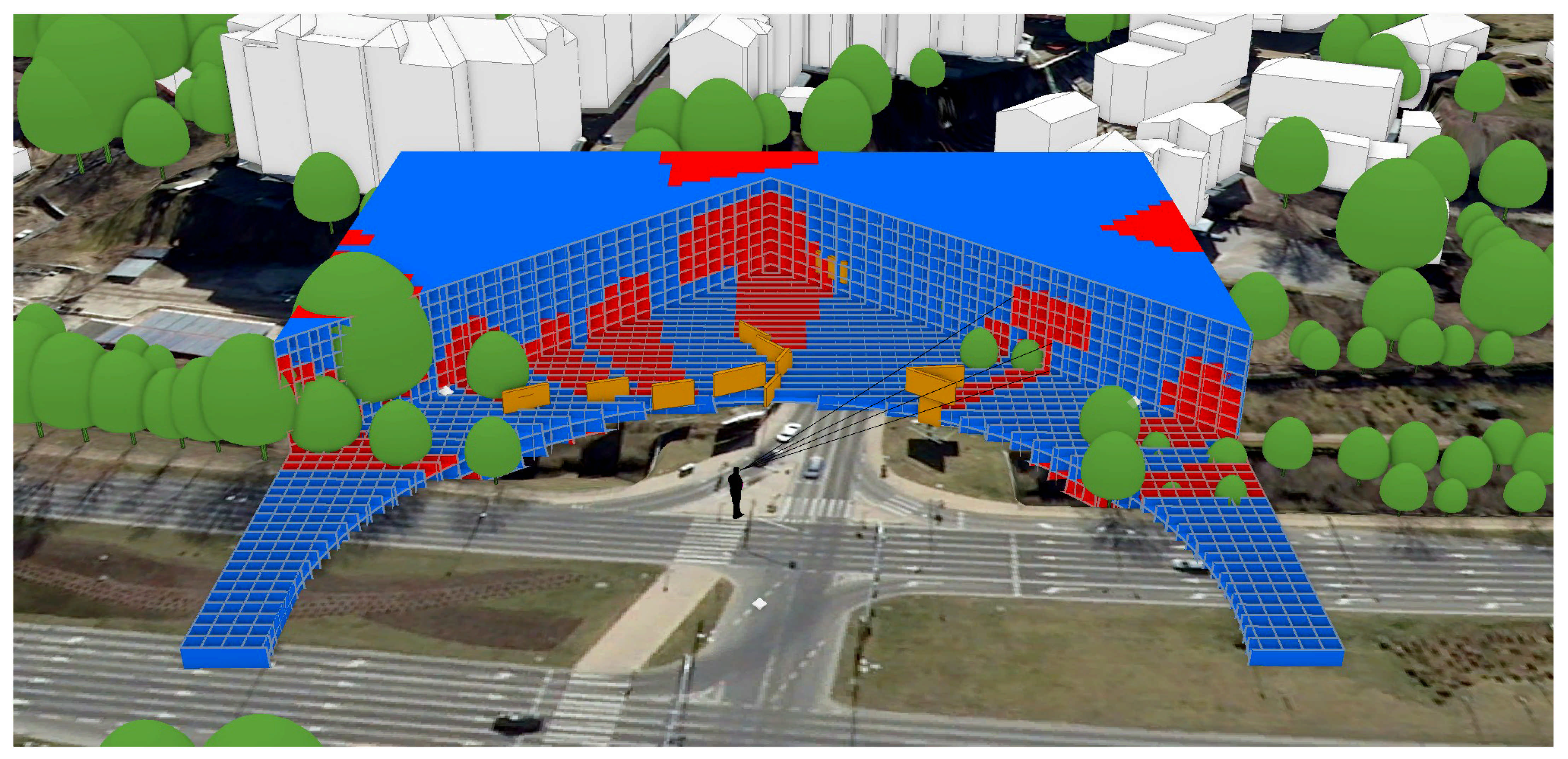
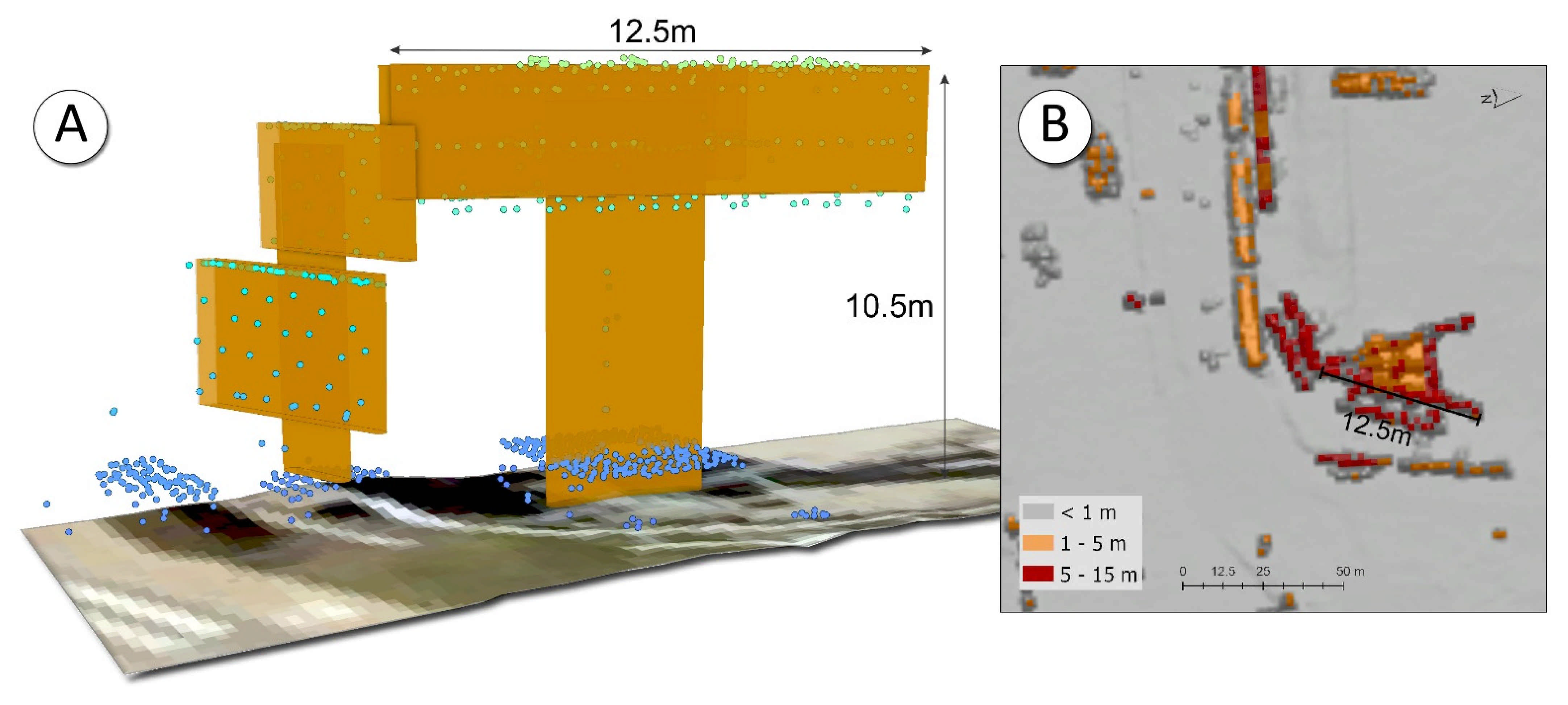
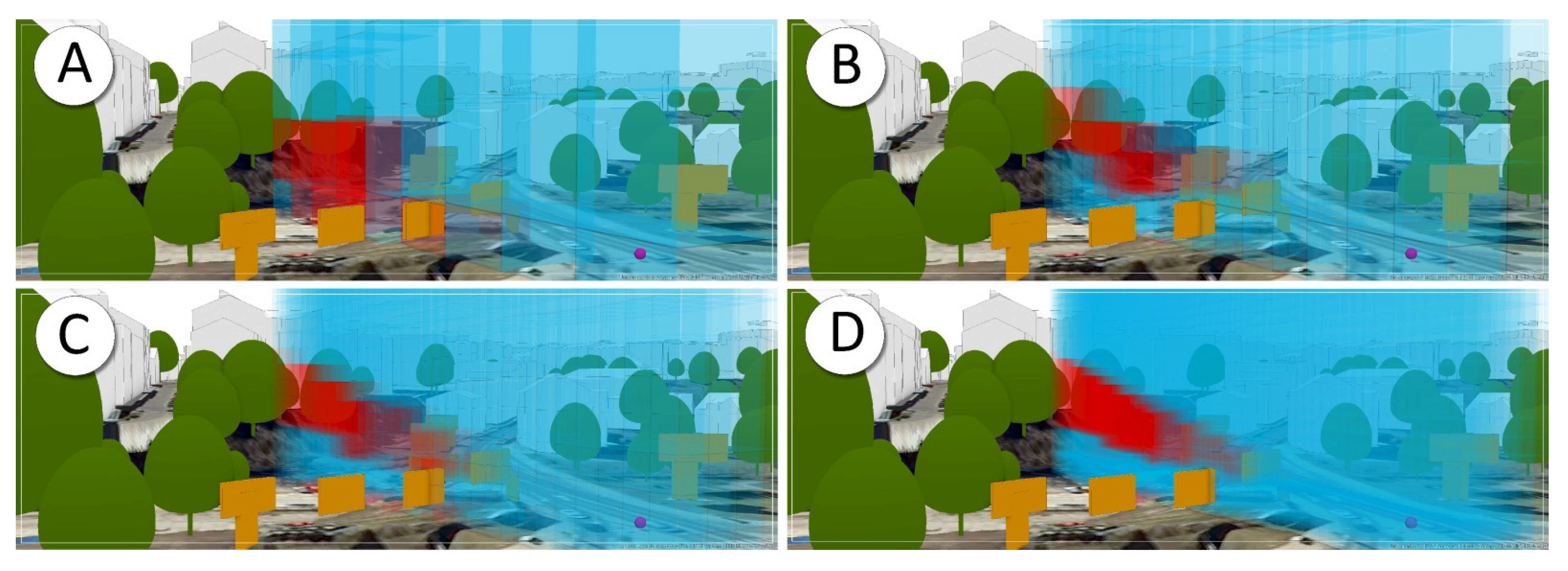
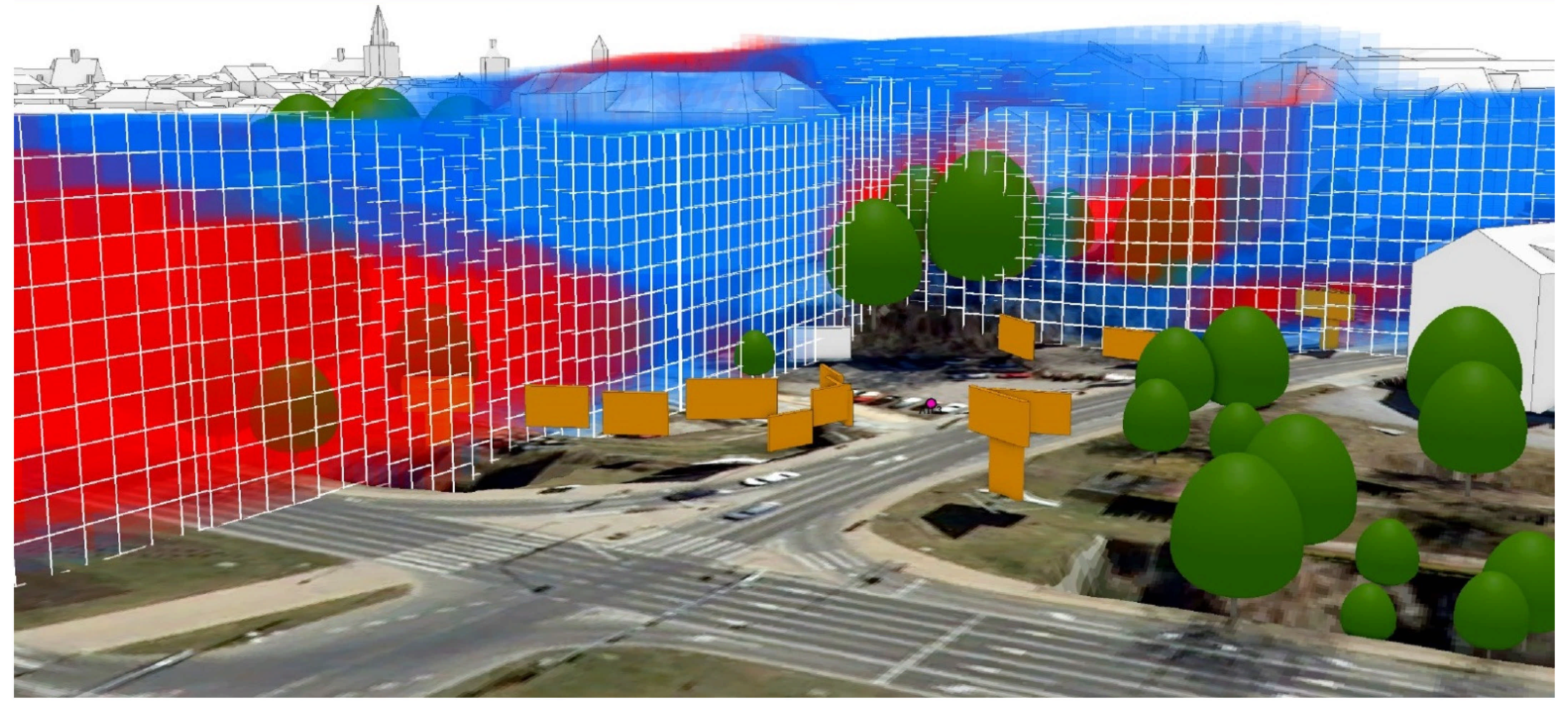
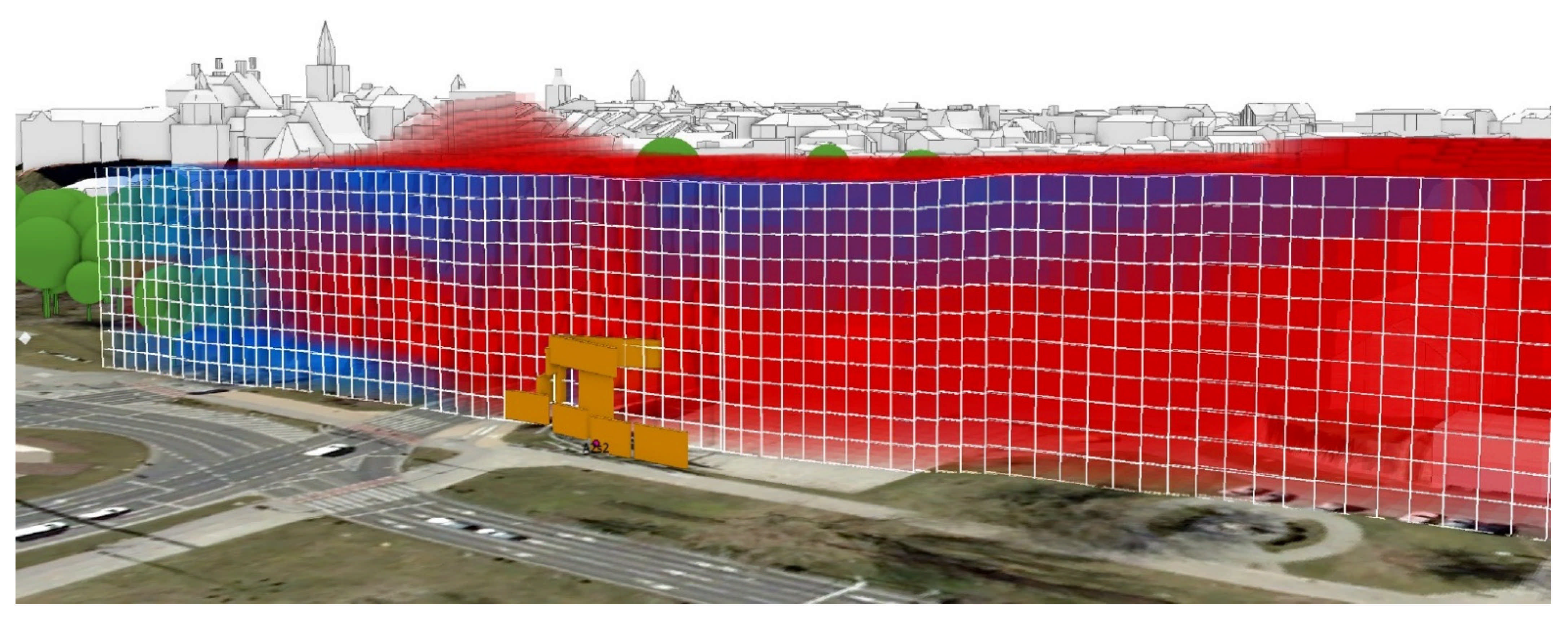
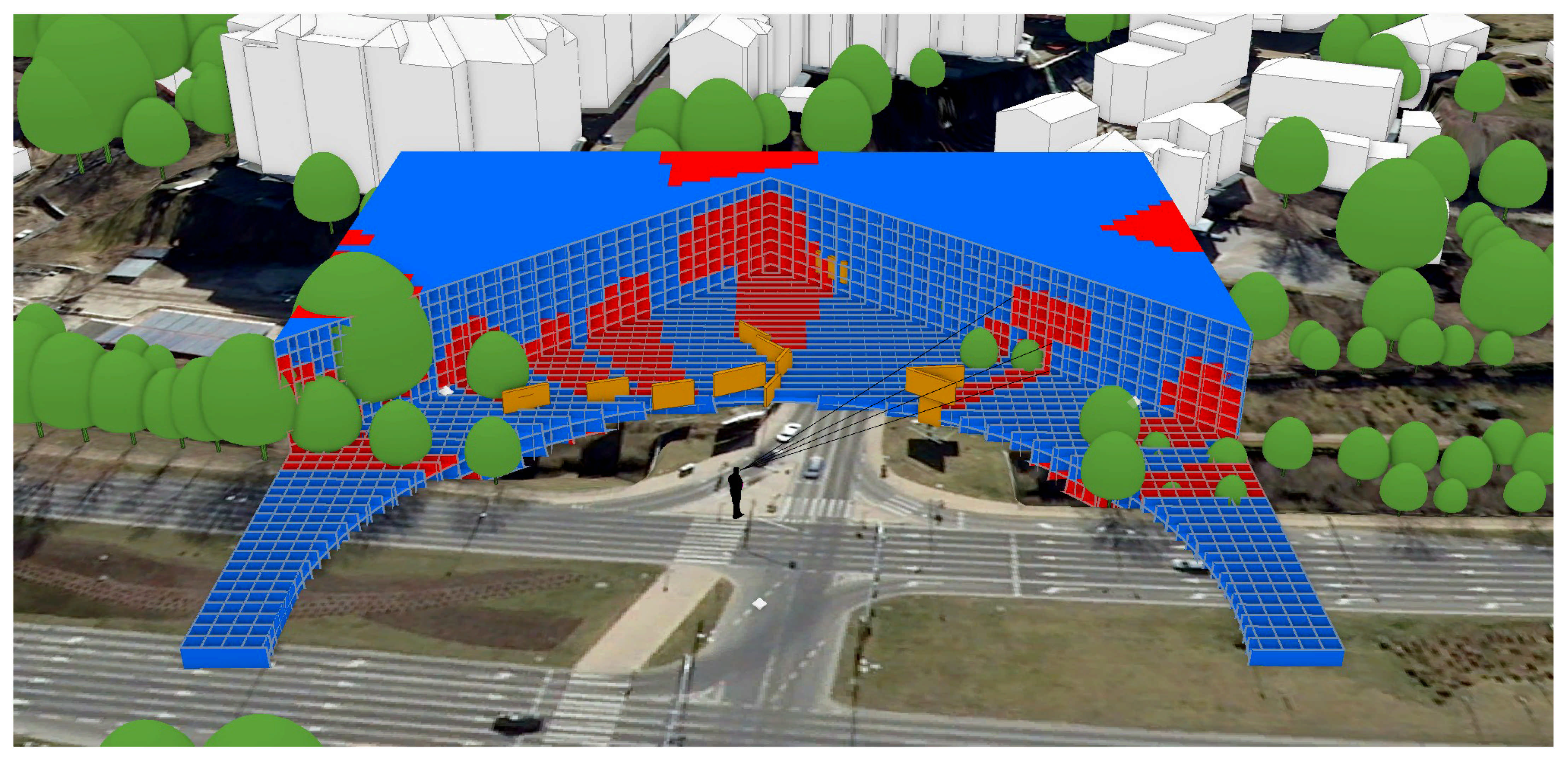
4.3. Solving 3D Isovists Using Voxels
4.4. The 3D ISOVISTS Scenarios and Statistical Analysis Method
5. Results
5.1. 3D City Modelling
5.2. The Results of Voxel Sizes Testing
5.3. Two Scenario 3D Isovists Results
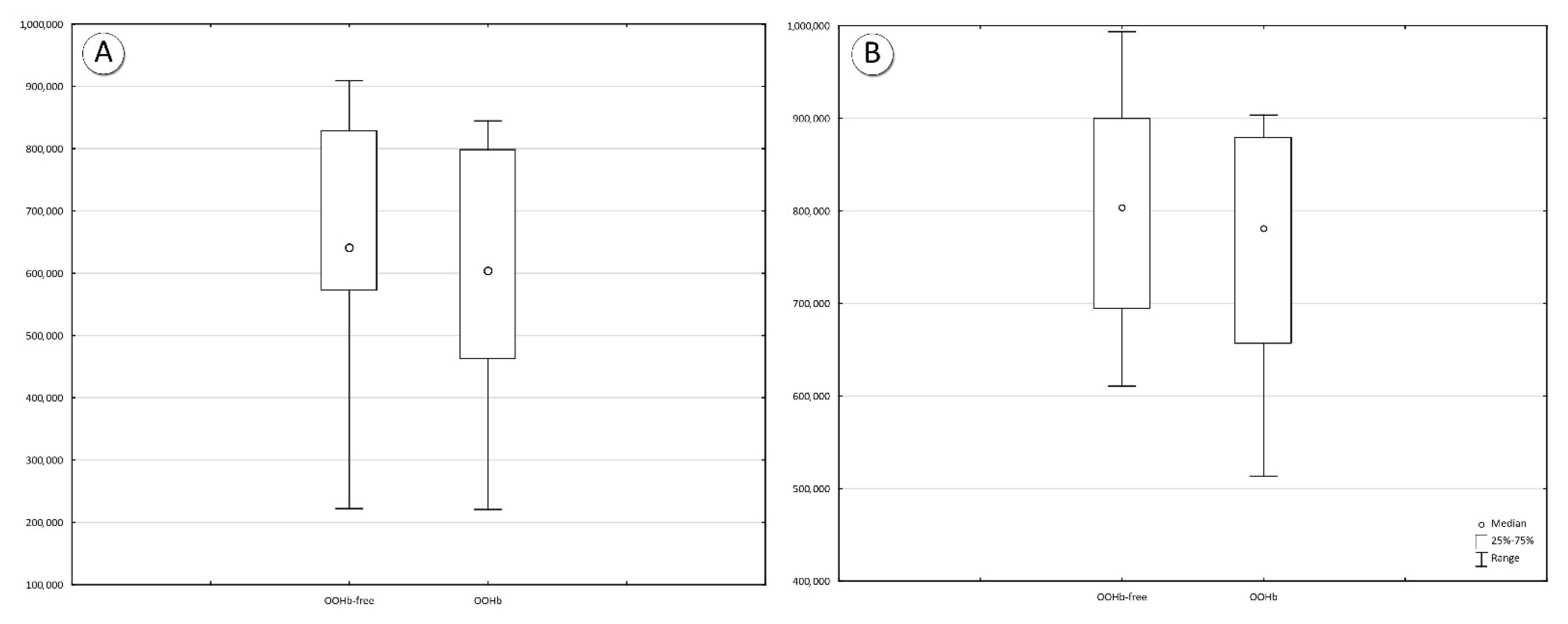
5.3.1. The VVV–OVV Balance of Area “A”
5.3.2. The VVV–OVV Balance of Area “B”
6. Discussion
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Portella, A. Visual Pollution: Advertising, Signage and Environmental Quality; Ashgate Publishing: Farnham, UK, 2014. [Google Scholar]
- Chmielewski, S. Chaos in motion: Measuring visual pollution with tangential view landscape metrics. Land 2020, 9, 515. [Google Scholar] [CrossRef]
- Szczepańska, M.; Wilkaniec, A.; Škamlová, L. Visual pollution in natural and landscape protected areas: Case studies from Poland and Slovakia. Quaest. Geogr. 2019, 38, 133–149. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, N.; Islam, M.N.; Tuba, A.S.; Mahdy, M.R.C.; Sujauddin, M. Solving visual pollution with deep learning: A new nexus in environmental management. J. Environ. Manag. 2019, 248, 109253. [Google Scholar] [CrossRef] [PubMed]
- Chmielewski, S.; Lee, D.; Tompalski, P.; Chmielewski, T.J.; Wężyk, P. Measuring visual pollution by outdoor advertisements in an urban street using intervisibility analysis and public surveys. Int. J. Geogr. Inf. Sci. 2016, 30, 801–818. [Google Scholar] [CrossRef]
- Allahyari, H.; Salehi, E.; Zebardast, L. Evaluation of visual pollution in urban squares using SWOT, AHP, and QSPM techniques (Case study: Tehran squares of Enghelab and Vanak). J. Pollut. 2017, 3, 655–667. [Google Scholar]
- Jana, M.K.; De, T. Visual pollution can have a deep degrading effect on urban and sub-urban community: A study in few places of Bengal, India, with special reference to unorganised billboards. Eur. Sci. J. 2015, 7881, 1–14. [Google Scholar]
- Kamičaitytė-Virbašienė, J.; Godienė, G.; Kavoliūnas, G. Methodology of visual pollution assessment for natural landscapes. J. Sustain. Archit. Civ. Eng. 2016, 13, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Madleňák, R.; Hudák, M. Analysis of data needs and having for the integrated urban freight transport management system. Commun. Comput. Inf. Sci. 2016, 40, 135–148. [Google Scholar]
- Śleszyński, P.; Kowalewski, A.; Markowski, T.; Legutko-Kobus, P.; Nowak, M. The contemporary economic costs of spatial chaos: Evidence from Poland. Land 2020, 9, 214. [Google Scholar] [CrossRef]
- Hayward, S.C.; Franklin, S.S. Perceived openness-enclosure of architectural space. Environ. Behav. 1974, 6, 37. [Google Scholar]
- Kaplan, R.; Kaplan, S. The Experience of Nature: A Psychological Perspective; Cambridge University Press: New York, NY, USA, 1989. [Google Scholar]
- Coeterier, J.F. Cues for the perception of the size of space in landscapes. J. Environ. Manag. 1994, 42, 333–347. [Google Scholar] [CrossRef]
- Fisher-Gewirtzman, D.; Burt, M.; Tzamir, Y. A 3-D visual method for comparative evaluation of dense built-up environments. Environ. Plan. B Plan. Des. 2003, 30, 575–587. [Google Scholar] [CrossRef] [Green Version]
- Shach-Pinsly, D.; Fisher-Gewirtzman, D.; Burt, M. Visual exposure and visual openness: An integrated approach and comparative evaluation. J. Urban Des. 2011, 16, 233–256. [Google Scholar] [CrossRef]
- Fisher-Gewirtzman, D. The association between perceived density in minimum apartments and spatial openness index three-dimensional visual analysis. Environ. Plan. B Urban Anal. City Sci. 2017, 44, 764–795. [Google Scholar] [CrossRef]
- Weitkamp, G. Mapping landscape openness with isovists. Res. Urban. Ser. 2011, 2, 205–223. [Google Scholar]
- Weitkamp, G.; Bregt, A.; van Ron, L. Measuring visible space to assess landscape openness. Landsc. Res. 2011, 36, 127–150. [Google Scholar] [CrossRef]
- Stamps, A.E., III; Smith, S. Environmental enclosure in urban settings. Environ. Behav. 2002, 34, 781–794. [Google Scholar] [CrossRef]
- Shi, S.; Gou, Z.; Chen, L.H.C. How does enclosure influence environmental preferences? A cognitive study on urban public open spaces in Hong Kong. Sustain. Cities Soc. 2014, 13, 148–156. [Google Scholar] [CrossRef]
- Kamicaityte-Virbasiene, J.; Samuchovi, O. Free standing billboards in a road landscape: Their Visual impact and its regulation possibilities (Lithuanian case) Júrate Kamicaityté-Virbasiené, Ona Samuchoviené. Environ. Res. Eng. Manag. 2013, 4, 66–78. [Google Scholar]
- Chmielewski, S.; Lee, D. Gis-based 3D visibility modelling of outdoor advertising in urban areas. In Proceedings of the XV SGEM Conference Proceedings, Albena, Bulgaria, 18–24 June 2015; pp. 923–930. [Google Scholar] [CrossRef]
- Benedikt, M.L. To take hold of space: Isovists and isovist fields. Env. Plan B Plan Des. 1979, 6, 47–65. [Google Scholar] [CrossRef]
- Felleman, J.P. Landscape Visibility Mapping: Theory and Practice School of Landscape Architecture; State University of New York, College of Environmental Forestry: Syracuse, NY, USA, 1979. [Google Scholar]
- Batty, M. Exploring isovist fields: Space and shape in architectural and urban morphology. Environ. Plan. B Plan. Des. 2001, 28, 123–150. [Google Scholar] [CrossRef] [Green Version]
- Hernández, J.; García, L.; Ayuga, F. Integration methodologies for visual impact assessment of rural buildings by geographic information systems. Biosyst. Eng. 2004, 88, 255–263. [Google Scholar] [CrossRef]
- Sahraoui, Y.; Vuidel, G.; Joly, D.; Foltête, J.C. Integrated GIS software for computing landscape visibility metrics. Trans. GIS 2018, 22, 1310–1323. [Google Scholar] [CrossRef]
- Chmielewski, S.; Tompalski, P. Estimating outdoor advertising media visibility with voxel-based approach. Appl. Geogr. 2017, 87, 1–13. [Google Scholar] [CrossRef]
- Yang, P.P.J.; Putra, S.Y.; Li, W. Viewsphere: A GIS-based 3D visibility analysis for urban design evaluation. Environ. Plan. B Plan. Des. 2007, 34, 971–992. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.; You, W.; Ding, W. Calculation of ground view factor as an index for urban thermal environment optimization. Energy Procedia 2017, 142, 2996–3001. [Google Scholar] [CrossRef]
- Dirksen, M.; Ronda, R.J.; Theeuwes, N.E.; Pagani, G.A. Sky view factor calculations and its application in urban heat island studies. Urban Clim. 2019, 30, 100498. [Google Scholar] [CrossRef]
- Bernard, J.; Bocher, E.; Petit, G.; Palominos, S. Sky view factor calculation in urban context: Computational performance and accuracy analysis of two open and free GIS Tools. Climate 2018, 6, 60. [Google Scholar] [CrossRef] [Green Version]
- Gong, F.Y.; Zeng, Z.C.; Zhang, F.; Li, X.; Ng, E.; Norford, L.K. Mapping sky, tree, and building view factors of street canyons in a high-density urban environment. Build Environ. 2018, 134, 155–167. [Google Scholar] [CrossRef]
- Bosselmann, P. Representation of Places: Reality and Realism in City Design; University of California Press: Berkeley, CA, USA, 1998. [Google Scholar]
- Morello, E.; Ratti, C. A digital image of the city: 3D isovists in Lynchs urban analysis. Environ. Plan. B Plan. Des. 2009, 36, 837–853. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.; Lin, H.; Hu, M. Three-dimensional visibility analysis and visual quality computation for urban open spaces aided by Google SketchUp and Web GIS. Environ. Plan. B Urban Anal. City Sci. 2015, 44, 618–646. [Google Scholar] [CrossRef]
- Tara, A.; Beleski, P.; Ninsalam, Y. Towards managing visual impacts on public spaces: A quantitative approach to study visual complexity and enclosure using visual bowl and fractal dimension in 3D. J. Digit. Landsc. Archit. 2019, 4, 21–32. [Google Scholar]
- Park, C.; Ha, J.; Lee, S. Association between three-dimensional built environment and urban air temperature: Seasonal and temporal differences. Sustainability 2017, 9, 1338. [Google Scholar] [CrossRef] [Green Version]
- Tara, A.; Lawson, G.; Renata, A. Measuring magnitude of change by high-rise buildings in visual amenity conflicts in Brisbane. Landsc. Urban Plan. 2021, 205, 103930. [Google Scholar] [CrossRef]
- Gomez, J.E.A. The billboardization of Metro Manila. Int. J. Urban Reg. Res. 2013, 37, 186–214. [Google Scholar] [CrossRef]
- Karami, S.; Taleai, M. An innovative three-dimensional approach for visibility assessment of highway signs based on the simulation of traffic flow. J. Spat. Sci. 2020, 1–15. [Google Scholar] [CrossRef]
- Elena, E.; Cristian, M.; Suzana, P. Visual pollution: A new axiological dimension of marketing? Ann. Fac. Econ. 2012, 1, 820–826. [Google Scholar]
- Enache, E.; Morozan, C.; Purice, S. Visual pollution: A new axiological dimension of marketing. In Proceedings of the 8th Edition of the International Conference “European Integration—New Challenges” EINCO2012, Oradea, Romania, 25–26 May 2012; pp. 2046–2051. Available online: http://anale.steconomiceuoradea.ro/volume/2012/proceedings-einco-2012.pdf (accessed on 5 May 2021).
- Hamilton, J.L.; Gerald, J. Visual Pollution Study, a Report to the Citizens of Jacksonville; Jacksonville Community Council, Inc.: Jacksonville, FL, USA, 1985; Available online: https://digitalcommons.unf.edu/jcci/4 (accessed on 5 May 2021).
- Polish National Geoportal. Available online: www.geoportal.gov.pl (accessed on 10 August 2020).
- American Society of Photogrammetry and Remote Sensing. Lidar LAS Specification, Version 1.2. 2008. Available online: https://www.asprs.org/divisions-committees/lidar-division/laser-las-file-format-exchange-activities (accessed on 10 March 2021).
- Barnes, C.; Balzter, H.; Barrett, K.; Eddy, J.; Milner, S.; Suárez, J.C. Individual tree crown delineation from airborne laser scanning for diseased larch forest stands. Remote Sens. 2017, 9, 231. [Google Scholar] [CrossRef] [Green Version]
- Hounsfield, G.N. Computed medical imaging. J. Comput. Assist. Tomogr. 1980, 4, 665–674. [Google Scholar] [CrossRef] [PubMed]
- Bremer, M.; Mayr, A.; Wichmann, V.; Schmidtner, K.; Rutzinger, M. A new multi-scale 3D-GIS-approach for the assessment and dissemination of solar income of digital city models. Comput. Environ. Urban Syst. 2016, 57, 144–154. [Google Scholar] [CrossRef]
- Pyysalo, U.; Oksanen, J.; Sarjakoski, T. Viewshed analysis and visualisation of landscape voxel models. In Proceedings of the 24th International Cartography Conference, Santiago, Chile, 15–21 November 2009. [Google Scholar]
- Palmer, J.F. The contribution of a GIS-based landscape assessment model to a scientifically rigorous approach to visual impact assessment. Landsc. Urban Plan. 2019, 189, 80–90. [Google Scholar] [CrossRef]
- Starek, M.J.; Chu, T.; Mitasova, H.; Harmon, R.S. Viewshed simulation and optimisation for digital terrain modelling with terrestrial laser scanning. Int. J. Remote Sens. 2020, 41, 6409–6426. [Google Scholar] [CrossRef]
- Natapov, A.; Kuliga, S.; Dalton, R.C.; Hölscher, C.H. Linking building-circulation typology and wayfinding: Design, spatial analysis, and anticipated wayfinding difficulty of circulation types. Archit. Sci. Rev. 2020, 63, 34–46. [Google Scholar] [CrossRef]
- Natapov, A.; Fisher-Gewirtzman, D. Visibility of urban activities and pedestrian routes: An experiment in a virtual environment. Comput. Environ. Urban Syst. 2016, 58, 60–70. [Google Scholar] [CrossRef]
- Drigo, M.O. Cidade/Invisibilidade e Cidade/Estranhamento: São Paulo Antes e Depois da lei “Cidade Limpa”. Galáxia 2009, 17, 49–64. Available online: https://revistas.pucsp.br/galaxia/article/view/2097 (accessed on 11 May 2021).
- Alexander, C.A. Pattern Language: Towns, Buildings, Construction; Oxford University Press: Oxford, UK, 1977; Available online: https://arl.human.cornell.edu/linked%20docs/Alexander_A_Pattern_Language.pdf (accessed on 20 March 2021).
- Fry, G.; Tveit, M.S.; Ode, Å.; Velarde, M.D. The ecology of visual landscapes: Exploring the conceptual common ground of visual and ecological landscape indicators. Ecol. Indic. 2009, 9, 933–947. [Google Scholar] [CrossRef]
- Wascher, D. European Landscape Character Areas: Typologies, Cartography and Indicators for the Assessment of Sustainable Landscapes. Final Project Report as Deliverable from the E.U.’s Accompanying Measure Project European Landscape Character Assessment Initiative (ELCAI); Landscape Europe: Wageningen, The Netherlands, 2005. [Google Scholar]
- Tveit, M.; Ode, Å.; Fry, G. Key concepts in a framework for analysing visual landscape character. Landsc. Res. 2007, 31, 229–255. [Google Scholar] [CrossRef]
- Selman, P. What do we mean by sustainable landscape? Sustain. Sci. Pract. Policy 2008, 4, 23–28. [Google Scholar] [CrossRef]
- Zielinska-Dabkowska, K.M. Make lighting healthier. Nature 2018, 553, 274–276. [Google Scholar] [CrossRef] [PubMed]
- Jayawickreme, E.; Forgeard, M.J.C.; Seligman, M.E.P. The engine of well-being. Rev. Gen. Psychol. 2012, 16, 327–342. [Google Scholar] [CrossRef]
- Olszewska-Guizzo, A. Neuroscience-based urban design for mentally-healthy cities. In Urban Health and Wellbeing Programme Policy Briefs; Springer Nature: Basingstoke, UK, 2021; Volume 2, pp. 13–16. [Google Scholar] [CrossRef]
- Alkhresheh, M. Enclosure as a Function of Height-To-Width Ratio and Scale: Its Influence on Users Sense of Comfort and Safety in Urban Street Space. Ph.D. Thesis, University of Florida, Gainesville, FL, USA, 2007. [Google Scholar]
- Stamps, A.E. Evaluating enclosure in urban sites. Landsc. Urban Plan. 2001, 57, 25–42. [Google Scholar] [CrossRef]
- White, G.; Zink, A.; Codecá, L.; Clarke, S. A digital twin smart city for citizen feedback. Cities 2021, 110, 103064. [Google Scholar] [CrossRef]
- Wrózyński, R.; Sojka, M.; Pyszny, K. The application of GIS and 3D graphic software to visual impact assessment of wind turbines. Renew. Energy 2016, 96, 625–635. [Google Scholar] [CrossRef]
- London View Management Framework SPG, Mayor of London. March 2012. Available online: https://www.london.gov.uk/what-we-do/planning/implementing-london-plan/london-plan-guidance-and-spgs/london-view-management (accessed on 8 January 2021).
- Suleiman, W.; Joliveau, T.; Favier, E. A New Algorithm for 3D Isovists. In Advances in Spatial Data Handling; Timpf, S., Laube, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 157–173. [Google Scholar] [CrossRef]
- Fisher, P.F. Probable and fuzzy models of the viewshed operation. In Innovations in GIS; Worboys, M., Ed.; Taylor & Francis: London, UK, 1984; pp. 161–175. [Google Scholar]
- Heinrich, C.H.; Candela, P. BRISK: Binary Robust Invariant Scalable Keypoints. In Proceedings of the 13th International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. Available online: www.research-collection.ethz.ch/handle/20.500.11850/43288 (accessed on 20 May 2021).
- Mor, M.; Fisher-Gewirtzman, D.; Yosifof, R.; Dalyot, S. 3D visibility analysis for evaluating the attractiveness of tourism routes computed from social media photos. ISPRS Int. J. Geo-Inf. 2021, 10, 275. [Google Scholar] [CrossRef]
- Phattaralerphong, J.; Sinoquet, H. A method for 3D reconstruction of tree crown volume from photographs: Assessment with 3D-digitized plants. Tree Physiol. 2005, 25, 1229–1242. [Google Scholar] [CrossRef] [PubMed] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voxel Size (m) | Voxel Volume (m3) | Voxels in b.box | Visible Voxels | Obstructed Voxels | Visible Voxels (%) | Obstructed Voxels (%) | VVV (m3) | OVV (m3) | Computation Time (min, s) | Post-Processing Time (min) |
|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 1000 | 2000 | 1599 | 401 | 80.0 | 20.0 | 1,599,000.0 | 401,000.0 | 0; 42 | On the fly |
| 5 | 125 | 16,000 | 12,247 | 3753 | 76.5 | 23.5 | 1,530,875.0 | 469,125.0 | 2; 37 | On the fly |
| 2.5 | 15.625 | 128,000 | 107,836 | 20,164 | 84.2 | 15.8 | 1,684,937.5 | 315,062.5 | 21; 2 | 3–4 |
| 1.25 | 1.953125 | 1,024,000 | 881,922 | 142,078 | 86.1 | 13.9 | 1,722,503.9 | 277,496.1 | 75; 34 | 74 |
| OOHb-FREE | OOHb | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| No. | Measurement Point | VVV(m3) | OVV(m3) | VVV (%) | OVV (%) | VVV(m3) | OVV(m3) | VVV (%) | OVV (%) | VVV Change (%) |
| 1 | A1S1 | 606,578.13 | 493,421.88 | 55.1 | 44.9 | 606,578.13 | 493,421.88 | 55.1 | 44.9 | 0.00 |
| 2 | A1S2 | 683,046.88 | 416,953.13 | 62.1 | 37.9 | 680,609.38 | 419,390.63 | 61.9 | 38.1 | −0.22 |
| 3 | A1S3 | 842,750.00 | 257,250.00 | 76.6 | 23.4 | 797,625.00 | 302,375.00 | 72.5 | 27.5 | −4.10 |
| 4 | A1S4 | 909,125.00 | 190,875.00 | 82.6 | 17.4 | 844,468.75 | 255,531.25 | 76.8 | 23.2 | −5.88 |
| 5 | A1S5 | 640,906.25 | 459,093.75 | 58.3 | 41.7 | 603,546.88 | 496,453.13 | 54.9 | 45.1 | −3.40 |
| 6 | A1S6 | 572,593.75 | 527,406.25 | 52.1 | 47.9 | 566,546.88 | 533,453.13 | 51.5 | 48.5 | −0.55 |
| 7 | A1L1 | 828,984.38 | 271,015.63 | 75.4 | 24.6 | 816,890.63 | 283,109.38 | 74.3 | 25.7 | −1.10 |
| 8 | A1L2 | 909,125.00 | 190,875.00 | 82.6 | 17.4 | 844,468.75 | 255,531.25 | 76.8 | 23.2 | −5.88 |
| 9 | A1L3 | 778,750.00 | 321,250.00 | 70.8 | 29.2 | 580,875.00 | 519,125.00 | 52.8 | 47.2 | −17.99 |
| 10 | A1L4 | 607,312.50 | 492,687.50 | 55.2 | 44.8 | 462,171.88 | 637,828.13 | 42.0 | 58.0 | −13.19 |
| 11 | A1L5 | 370,046.88 | 729,953.13 | 33.6 | 66.4 | 307,406.25 | 792,593.75 | 27.9 | 72.1 | −5.69 |
| 12 | A1L6 | 241,515.63 | 858,484.38 | 22.0 | 78.0 | 234,750.00 | 865,250.00 | 21.3 | 78.7 | −0.62 |
| 13 | A1L7 | 221,968.75 | 878,031.25 | 20.2 | 79.8 | 220,640.63 | 879,359.38 | 20.1 | 79.9 | −0.12 |
| 14 | A2S1 | 801,171.88 | 298,828.13 | 72.8 | 27.2 | 780,843.75 | 319,156.25 | 71.0 | 29.0 | −1.85 |
| 15 | A2S2 | 902,281.25 | 197,718.75 | 82.0 | 18.0 | 513,421.88 | 586,578.13 | 46.7 | 53.3 | −35.35 |
| 16 | A2S3 | 993,656.25 | 106,343.75 | 90.3 | 9.7 | 888,343.75 | 211,656.25 | 80.8 | 19.2 | −9.57 |
| 17 | A2S4 | 899,515.63 | 200,484.38 | 81.8 | 18.2 | 879,203.13 | 220,796.88 | 79.9 | 20.1 | −1.85 |
| 18 | A2S5 | 803,359.38 | 296,640.63 | 73.0 | 27.0 | 802,312.50 | 297,687.50 | 72.9 | 27.1 | −0.10 |
| 19 | A2S6 | 694,453.13 | 405,546.88 | 63.1 | 36.9 | 694,453.13 | 405,546.88 | 63.1 | 36.9 | 0.00 |
| 20 | A2L1 | 641,031.25 | 458,968.75 | 58.3 | 41.7 | 640,734.38 | 459,265.63 | 58.2 | 41.8 | −0.03 |
| 21 | A2L2 | 887,593.75 | 212,406.25 | 80.7 | 19.3 | 884,234.38 | 215,765.63 | 80.4 | 19.6 | −0.31 |
| 22 | A2L3 | 909,234.38 | 190,765.63 | 82.7 | 17.3 | 903,625.00 | 196,375.00 | 82.1 | 17.9 | −0.51 |
| 23 | A2L4 | 826,671.88 | 273,328.13 | 75.2 | 24.8 | 812,359.38 | 287,640.63 | 73.9 | 26.1 | −1.30 |
| 24 | A2L5 | 759,843.75 | 340,156.25 | 69.1 | 30.9 | 737,265.63 | 362,734.38 | 67.0 | 33.0 | −2.05 |
| 25 | A2L6 | 669,312.50 | 430,687.50 | 60.8 | 39.2 | 657,390.63 | 442,609.38 | 59.8 | 40.2 | −1.08 |
| 26 | A2L7 | 610,640.63 | 489,359.38 | 55.5 | 44.5 | 605,906.25 | 494,093.75 | 55.1 | 44.9 | −0.43 |
| “A” Area | Mean | Median | Q1 | Q3 | Mini | Max | S.D. | Sign Test | Wilcoxon Test |
|---|---|---|---|---|---|---|---|---|---|
| OOHb-free | 582,044.5 | 603,546.9 | 462,171.9 | 797,625.0 | 220,640.6 | 844,468.8 | 221,999.1 | p = 0.001496 | p = 0.002218 |
| OOHb | 631,746.4 | 640,906.3 | 572,593.8 | 828,984.4 | 221,968.8 | 909,125.0 | 233,638.4 |
| “B” Area | Mean | Median | Q1 | Q3 | Mini | Max | S.D. | Sign Test | Wilcoxon Test |
|---|---|---|---|---|---|---|---|---|---|
| OOHb-free | 799,905.0 | 803,359.4 | 694,453.1 | 899,515.6 | 610,640.6 | 993,656.3 | 118,728.1 | p = 0.001496 | p = 0.002218 |
| OOHb | 753,853.4 | 780,843.8 | 657,390.6 | 879,203.1 | 513,421.9 | 903,625.0 | 124,274.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chmielewski, S. Towards Managing Visual Pollution: A 3D Isovist and Voxel Approach to Advertisement Billboard Visual Impact Assessment. ISPRS Int. J. Geo-Inf. 2021, 10, 656. https://doi.org/10.3390/ijgi10100656
Chmielewski S. Towards Managing Visual Pollution: A 3D Isovist and Voxel Approach to Advertisement Billboard Visual Impact Assessment. ISPRS International Journal of Geo-Information. 2021; 10(10):656. https://doi.org/10.3390/ijgi10100656
Chicago/Turabian StyleChmielewski, Szymon. 2021. "Towards Managing Visual Pollution: A 3D Isovist and Voxel Approach to Advertisement Billboard Visual Impact Assessment" ISPRS International Journal of Geo-Information 10, no. 10: 656. https://doi.org/10.3390/ijgi10100656
APA StyleChmielewski, S. (2021). Towards Managing Visual Pollution: A 3D Isovist and Voxel Approach to Advertisement Billboard Visual Impact Assessment. ISPRS International Journal of Geo-Information, 10(10), 656. https://doi.org/10.3390/ijgi10100656