1. Introduction
Nowadays, global satellite navigation systems (GNSS) are widely used for outdoor positioning and navigation and verified in many high-precision positioning fields. Common GNSS high-precision positioning technologies include real-time kinematic (RTK) and precise point positioning (PPP). They are the representatives of outdoor dynamic high-precision positioning solutions and, nowadays, are fully realized. However, GNSS signal is unreliable in GNSS-denied conditions due to occlusion, such as in indoor environments [
1]. Therefore, a variety of indoor positioning technologies are gradually researched. For example, indoor positioning technologies with an accuracy of 3–5 m, such as Wi-Fi, Bluetooth, ZigBee and geomagnetism, can be used in emergency security, intelligent warehousing, precision marketing and mobile health. While audio, UWB, pseudolite and infrared positioning technologies with high-precision positioning accuracy are commonly used in aircraft manufacturing, large facilities monitoring, mine or tunnel engineering geodesy and robot intelligent positioning navigation. Among them, UWB technology is considered to be suitable for high-precision indoor positioning because of its advantages of fast transmission, strong penetration and anti-multipath fading ability [
2].
The research into navigation and positioning generally focuses on the anchors arrangement, positioning algorithm and data fusion, error analysis and quality control. Similarly, most of the research on UWB indoor positioning focuses on the anchors arrangement, positioning algorithm, error modeling including non-line of sight (NLOS) and noise.
With regard to the anchors arrangement, the geometric dilution of precision (GDOP), Cramer–Rao lower bound (CRLB) and Root mean square error (RMSE) are usually used as objective functions. Especially the RMSE and GDOP are widely utilized as metrics to evaluate the optimal anchors arrangement [
3]. Lin et al. [
4] used a multi-lateration method to deal with the anchors arrangement problem, and the minimal position dilution of precision (PDOP) was the goal of optimization. Monica et al. [
5] proposed an approach of the optimized placement of anchor nodes using the criterion of minimizing the average RMSE. Chen et al. [
6] used the genetic algorithm (GA) to optimize locations of the anchor nodes, and the optimization objective was to minimize the average RMSE. Based on the Chan algorithm, Li et al. [
7] analyzed the base station arrangement method in combination with the system construction site. Their optimization objective function was similar to that in the previous literature. Pan et al. [
8] considered CRLB and coverage degree criterion as the objective function of the differential evolution (DE) algorithm, simultaneously. Wang et al. [
9] proposed a search method for the optimal arrangement of the reference nodes based on a genetic algorithm. Wang et al. [
10] proved that the dilution of precision DOP could not be used as the decisive metric for the configuration and optimization of the anchors. In fact, it was difficult to find a ubiquitous arrangement optimization principle due to the multipath and NLOS problems in the indoor environment. The anchors arrangement can only be adjusted according to the actual situation.
In terms of a UWB positioning algorithm, the Chan algorithm and nonlinear least squares estimation are often used for positioning the calculation if no extra nodes are used [
2]. Some errors can also be corrected in advance or estimated according to the environment-related parameters [
11]. These solutions are widely developed and discussed. In order to expand the availability of positioning, other positioning technologies are integrated with UWB technology. Geng et al. [
12] fused UWB and ZigBee technologies using maximum likelihood estimation. Graichen et al. [
13] applied occupancy grid maps (OGMs) to assist UWB positioning, and the proposed method increased the positioning accuracy. Krapež et al. [
14] adopted additional calibration modules (CMs) in a 3D UWB positioning system. The results showed that the calibration before positioning could effectively improve the positioning accuracy. Wang et al. [
15] proposed several positioning algorithms for different indoor scenes. The improved UWB location algorithm could meet a variety of positioning requirements. The most common method was to integrate UWB with inertial navigation system (INS). Li et al. [
16] introduced map matching to optimize PPP/INS/UWB tight coupling positioning, which could effectively improve the positioning accuracy. Nguyen et al. [
17] fused the inertial measurement unit (IMU) and UWB with camera. UWB ranging observations were focused on and the elimination of time offset was studied. The experimental results were clearly better than the traditional methods. In addition, Li et al. [
18] proposed applying a particle filter to IMU/UWB positioning. Li et al. [
19] used an extended Kalman filter (EKF) to improve the positioning accuracy of UWB and adopted an error-state Kalman filter (ESKF) to fuse UWB and IMU. Guo et al. [
20] realized an indoor positioning method based on pedestrian dead reckoning (PDR) and UWB. The average error could reach up to a decimeter. Wang et al. [
21] proposed a zero-velocity update (ZUPT)/UWB fusion algorithm based on graph optimization, with an accuracy of 0.4 m. The same idea was also presented by Zhang et al. [
22]. Lutz et al. [
23] proposed to combine UWB and a visual–inertial navigation system (VINS) to provide accurate pose estimations. Additionally, the drift in VINS could be alleviated. Actually, INS/UWB integration could improve positioning accuracy and availability, and maintain the continuity of positioning results when the UWB signal was missing. However, INS could not be calibrated when the UWB positioning accuracy was not guaranteed. Therefore, the error analysis and quality control of the UWB positioning results was very crucial.
Many studies focused on positioning error analysis and quality control. Bharadwaj et al. [
24] studied the effect of human position on line-of-sight (LOS) and NLOS observations of UWB. Cao et al. [
25] calibrated the UWB in the LOS scene and used three estimation methods to improve the positioning accuracy in the NLOS scene. Yang et al. [
26] introduced the concepts of “virtual inertial point” and “environmental factor” to compensate the NLOS error in UWB indoor positioning. Zhang et al. [
27] proposed a phase-difference-of-arrival (PDOA)-assisted UWB positioning method for the NLOS environment. In addition, neural networks were used to classify and recognize LOS/NLOS signals [
28,
29,
30,
31]. For example, Cui et al. [
32] proposed a LOS/NLOS identification method based on a Morlet wave transform and convolutional neural networks. As for the processing of UWB error (including NLOS), a robust and adaptive Kalman filter was often utilized [
33,
34,
35]. In addition, Xia et al. [
36] applied a particle swarm optimization (PSO) algorithm for UWB positioning. The traditional PSO algorithm was used to obtain the initial value, and all the ranging information was applied to refine the positioning result, which effectively reduced the ranging error. However, the signal error was not classified, and for the analyses in these methods, the quality was not been controlled either. In fact, the analysis of UWB positioning errors was of great significance to understand its essence.
In addition to the theoretical research, UWB is widely used for the real-time high-precision positioning in indoor industrial engineering. For example, the status of people and equipment in coal operation are available at any time in the UWB mine personnel positioning system. Early warning and rescue measures can be provided. Furthermore, UWB technology is commercially applied to high-precision indoor and outdoor cable channel inspection. The Local Sense UWB precise positioning system developed by Tsinghua University has a positioning accuracy of 10 cm [
2]. It solved the problem of the inability to precisely position components, equipment, vehicles and personnel in the industrial field, such as electric power, tunnels, and in the coal and chemical industry. The UWB system developed by Zebra Company of the United States achieved a sub-meter positioning precision and hwas applied in warehousing and logistics [
37]. Ubisense Company in the UK launched the UWB-based transmitting and receiving module. The system measures the arrival time difference and the angle of arrival of the signal, and obtains the three-dimensional coordinates of the target according to the positioning algorithm. The error of the three-dimensional coordinates can be controlled within 15 cm with the Ubisense system [
37]. DW1000, launched by the Decawave (now Qorvo) company, is a widely used UWB product [
38] which is applied to many UWB-integrated development companies and scientific research institutions in colleges and universities. Wen et al. [
39] also put forward a new strategy combining the downlink time difference of arrival (TDOA) based on real-time UWB in tunnels and highway scenarios. While the accuracy only reached 1 decimeter to 1 m. Hasan et al. [
40] used UWB to compensate the position of automated guided vehicles (AGV) for the distribution of goods, scheduling of machine processes and coordination. Lawrence et al. [
41] proposed using three UWB tags to determine the positions and attitudes of the mobile laser scanner for building information modeling (BIM) 3D data collection.
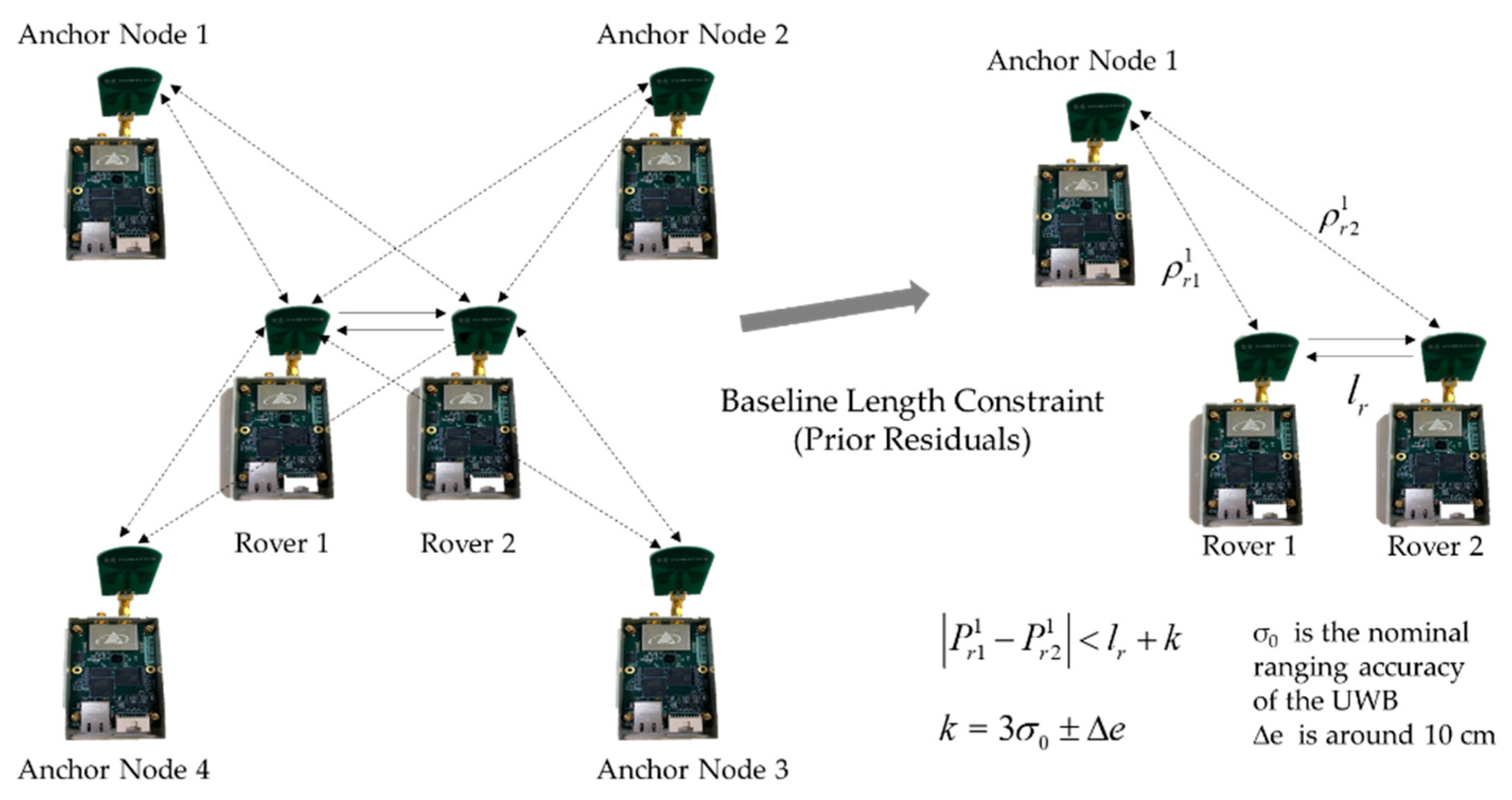
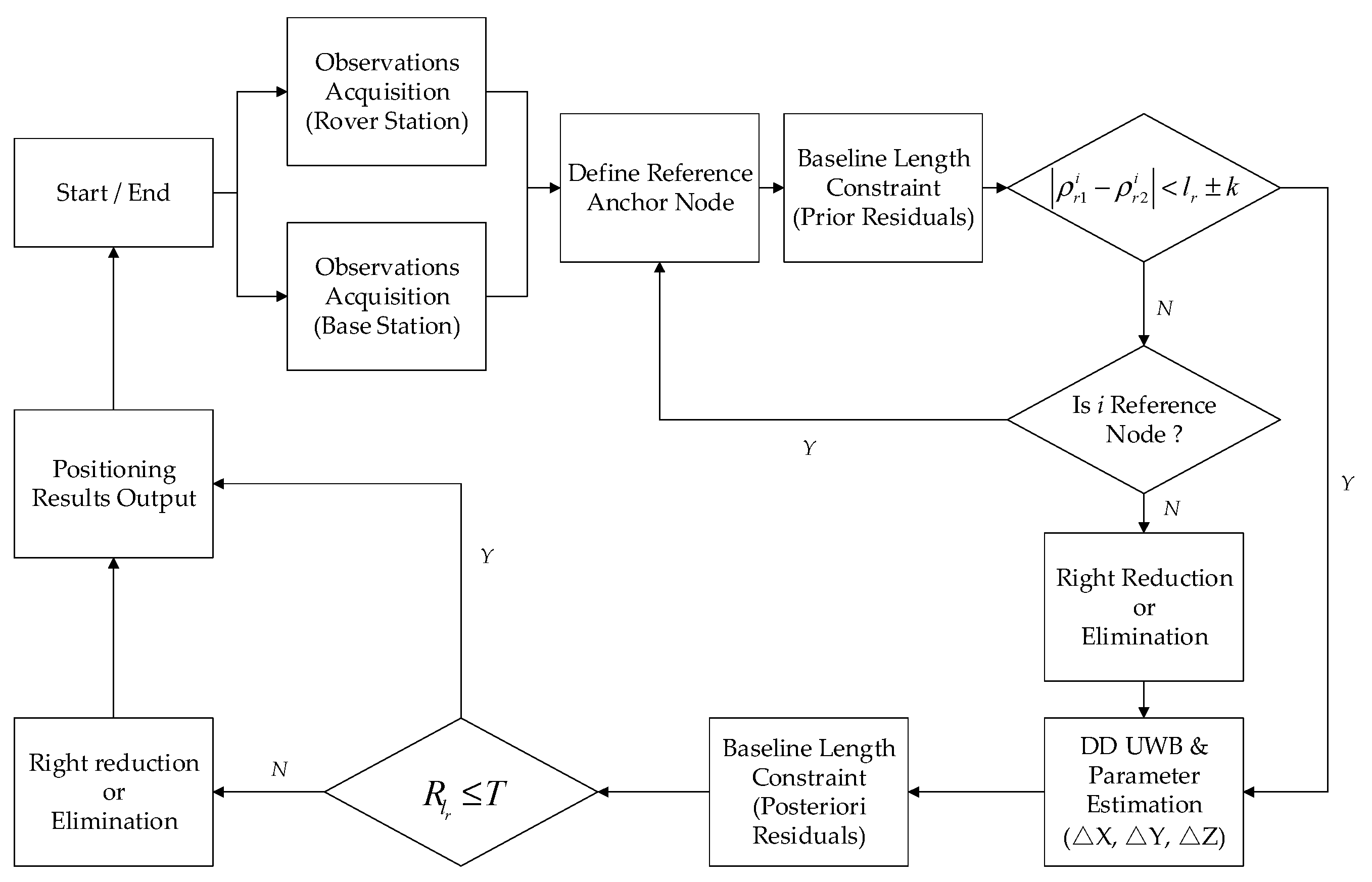
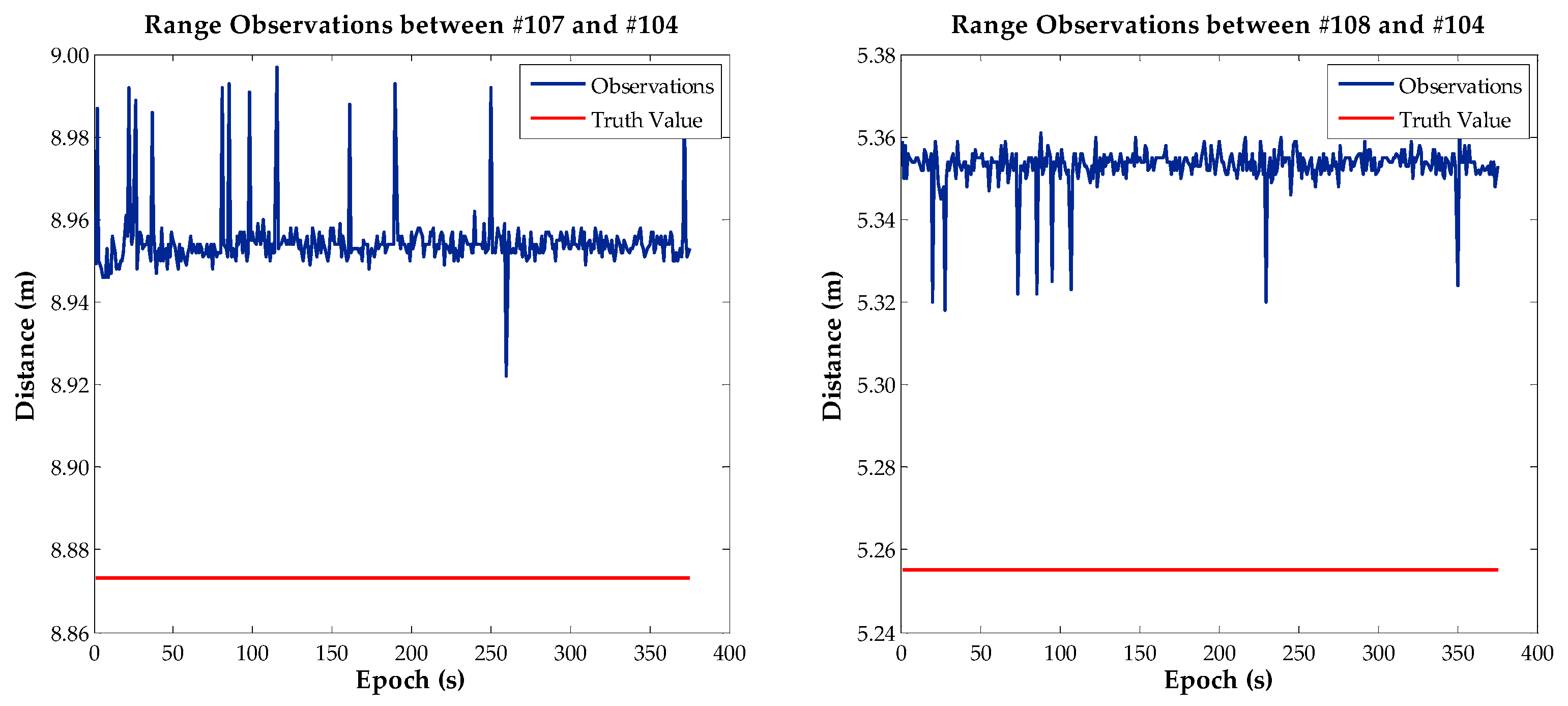
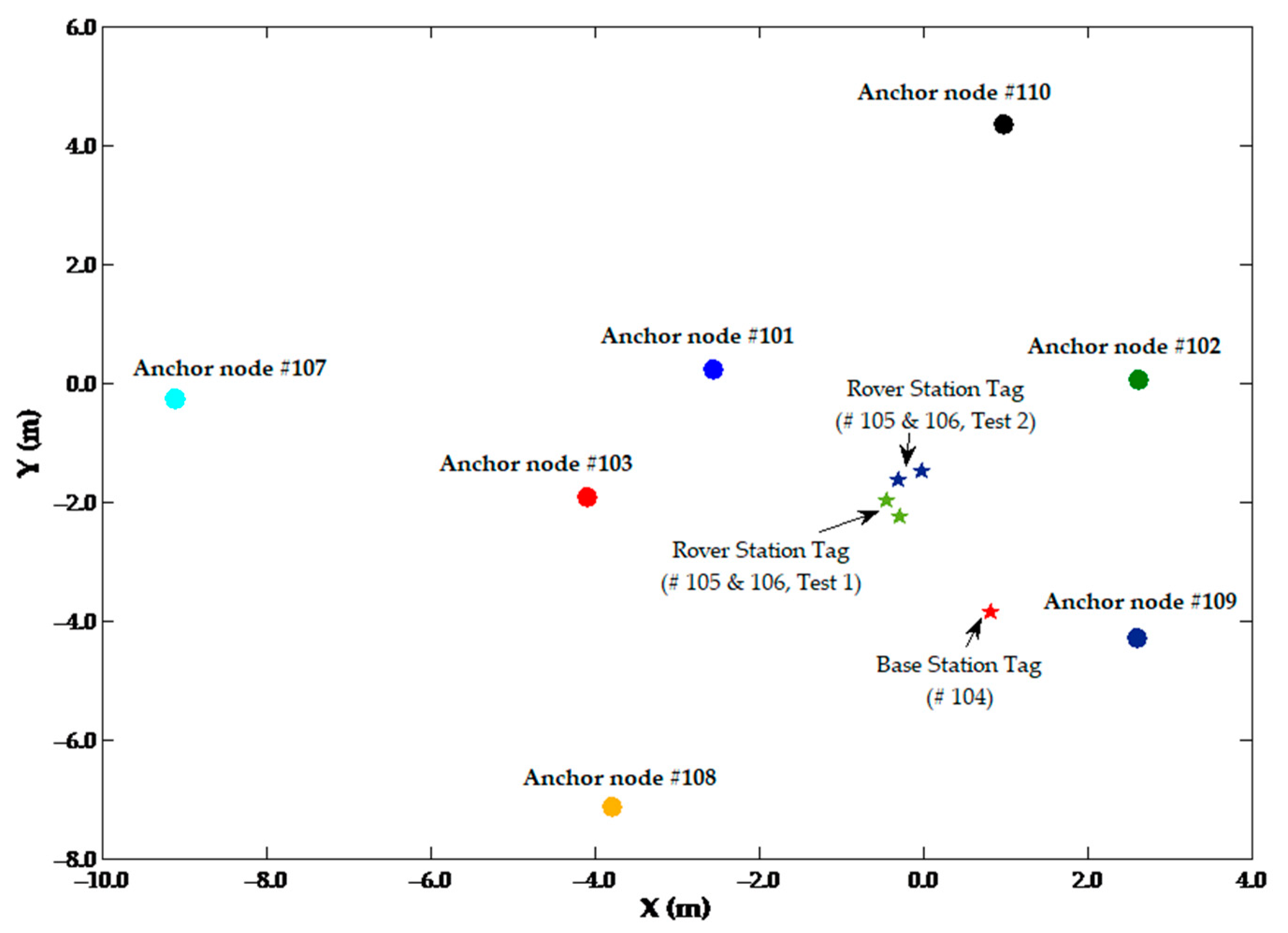
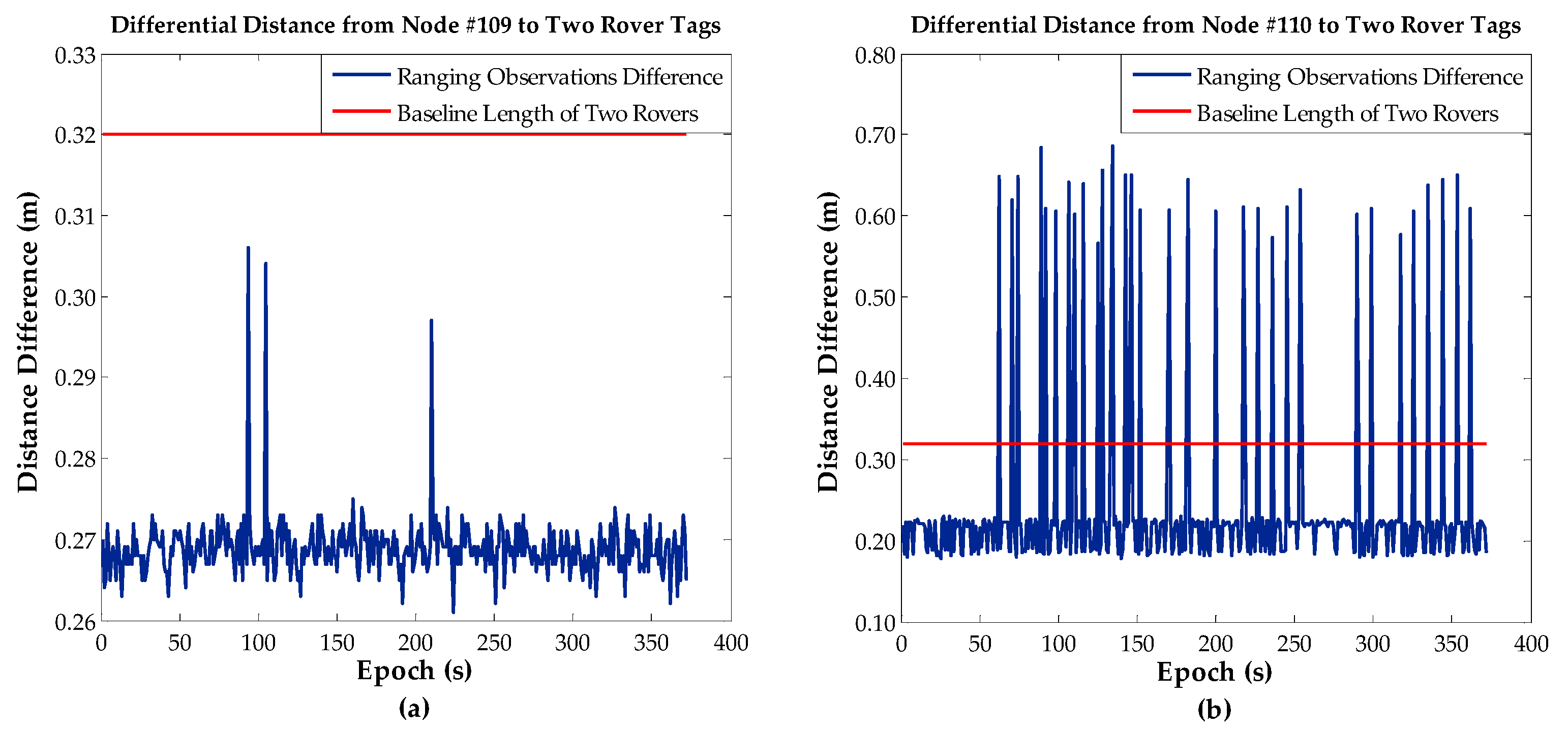
Although UWB positioning systems in industrial engineering are widely applied, there are still many details that can be further optimized, especially in precision, error analysis and quality control. Current research tends to focus on either error modelling and correction, or error elimination using a robust method. However, it is essential to classify errors to find main factors affecting the positioning. In this article, the main error that affects the accuracy is obtained through the exploration of UWB errors. Combined with the actual ranging observations, it is verified that the ranging errors are mainly composed of systematic and random errors. Regarding GNSS double difference technology, time-independent error components in UWB ranging observations are processed by a differential method, and a positioning algorithm based on double difference (DD) UWB ranging observations is proposed and deduced. Then, we introduce two rover stations to form a known baseline, which is used as an additional condition to constrain the original observations and coordinate the estimation values from the perspective of prior and posteriori. Therefore, the weight of ranging observations with large residual errors is reduced. Finally, through the experiments, the proposed method is verified to eliminate the systematic errors and large random errors effectively. The proposed method has the ability to control the quality of positioning the results and guarantees a precision at the centimeter level. For the convenience of description, the proposed method is named BC-DUWB (baseline constrained double difference UWB positioning).
4. Conclusions and Discussion
When UWB technology is used for indoor ranging and positioning, the three-dimensional coordinates of the rover stations are generally taken as the parameters to be estimated. The Chan algorithm and nonlinear least squares estimation are often used for positioning calculations. In this article, the UWB error is analyzed and an UWB indoor double difference positioning algorithm with a baseline constraint is proposed. The main contents and contributions are as follows:
- (1)
The error is classified and verified, and the function model is established.
Current research focuses more on error modeling and elimination, but lacks comprehensive error decomposition and analysis. Based on PulsON UWB devices, this article focuses on exploring UWB ranging errors, and proposes dividing the errors into three parts: anchor nodes, tags and propagation-path related errors. The corresponding function model is also given in this article. Furthermore, UWB ranging errors are classified into systematic errors represented by electrical delay, antenna phase center deviation and anchor node coordinate error, and random errors and gross errors are represented by noise and multipath.
- (2)
A double difference method is proposed to eliminate some systematic errors.
As for systematic deviation, a double difference positioning method based on UWB TW-TOF ranging observations is proposed and the formulas are derived to prove the feasibility of eliminating this systematic deviation theoretically.
- (3)
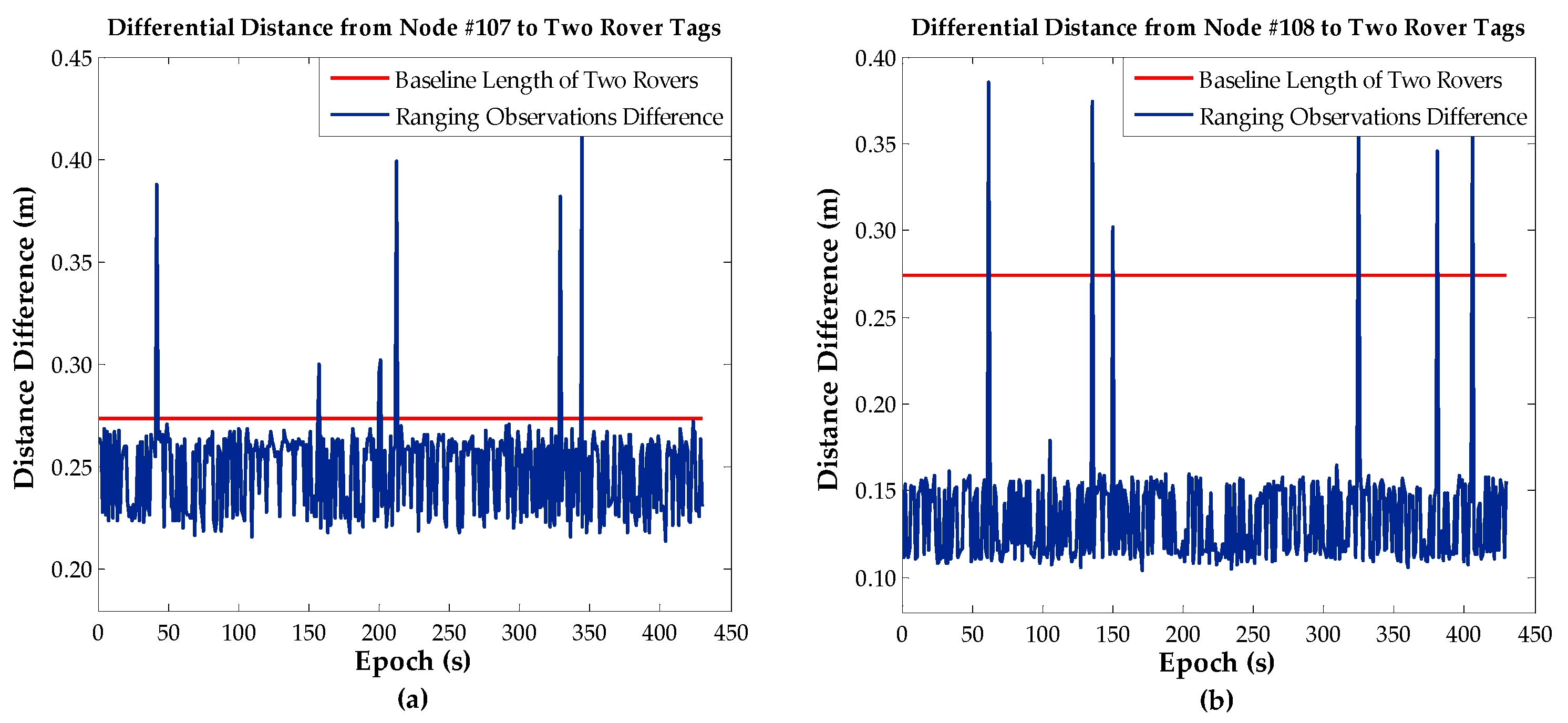
A strategy based on known baseline length constraint is proposed to identify and eliminate large random errors.
For large random and gross errors, two rover stations are introduced and the DD UWB positioning method with additional baseline constraints is proposed for positioning quality control.
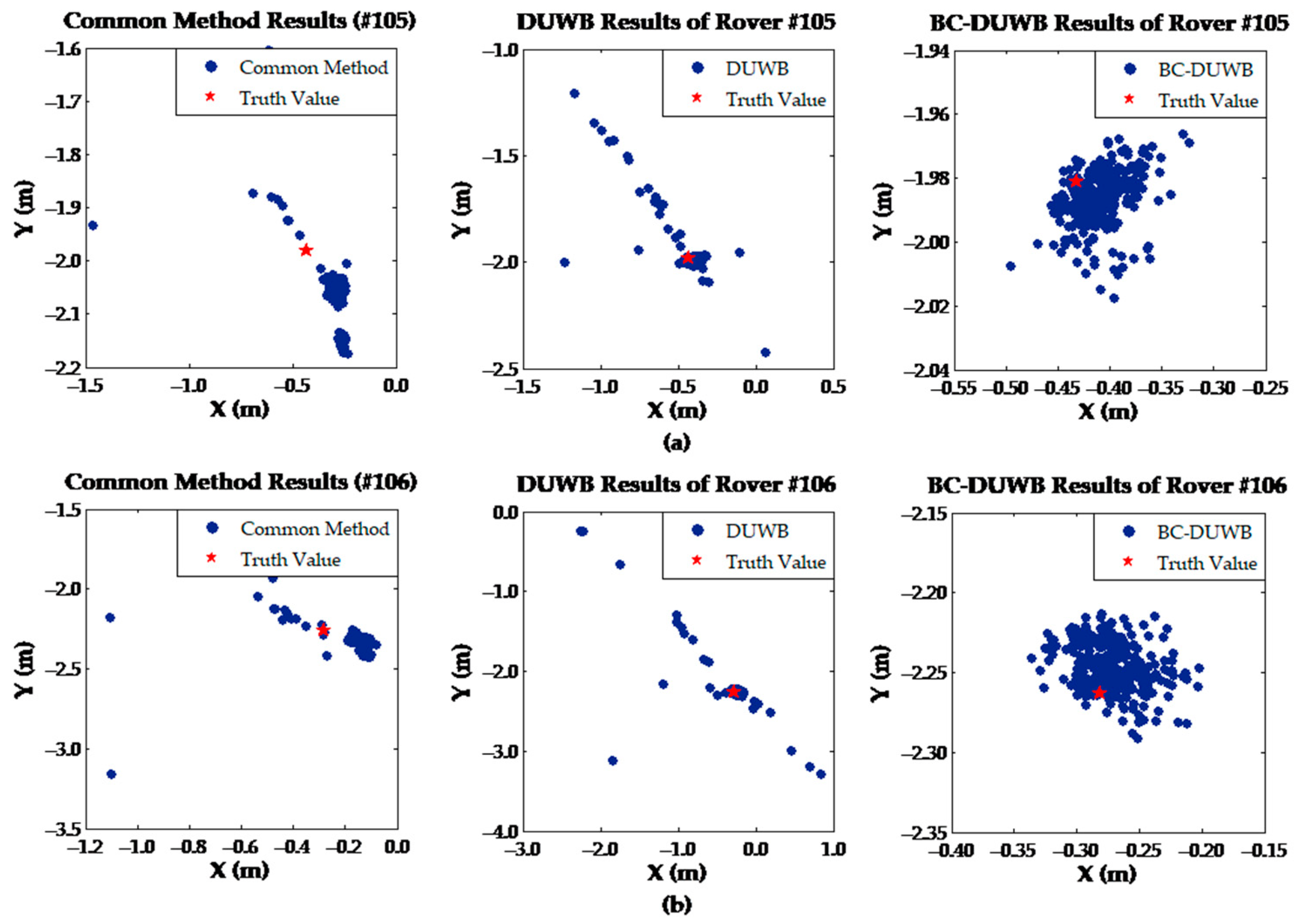
The experimental results show that the proposed method can eliminate the systematic error effectively and reach the high accuracy of the positioning results. After adopting the baseline constraint, gross errors and large random errors are eliminated as well. The experimental results are summarized as follows:
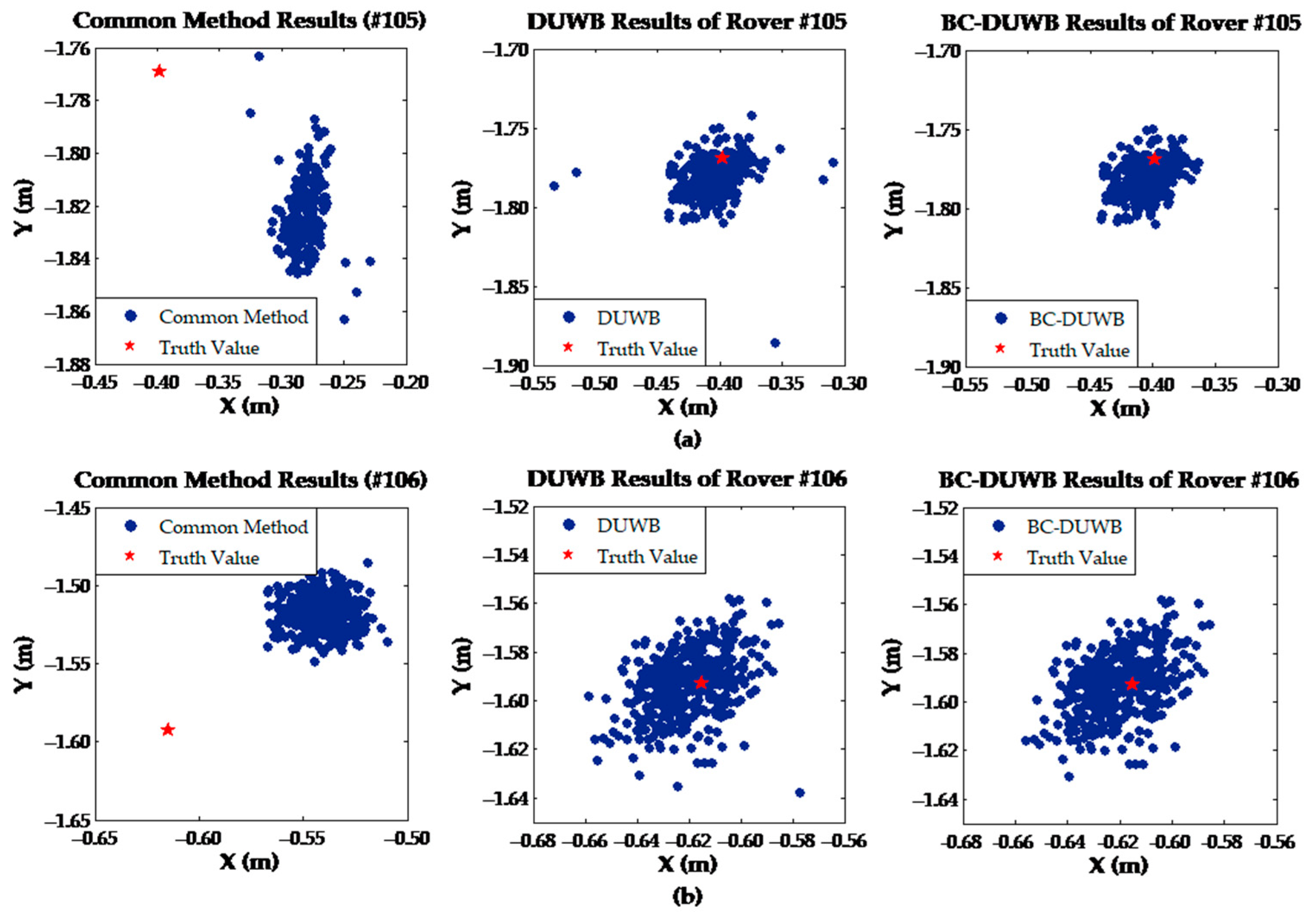
- (1)
The positioning precision of two rover stations in static experiments is more than 80% higher than that of the common method. When the data quality is poor, the positioning precision can reach about 3.4 cm. The positioning precision can reach 2.0 cm when the data quality is good, which further illustrates the robustness of the proposed method.
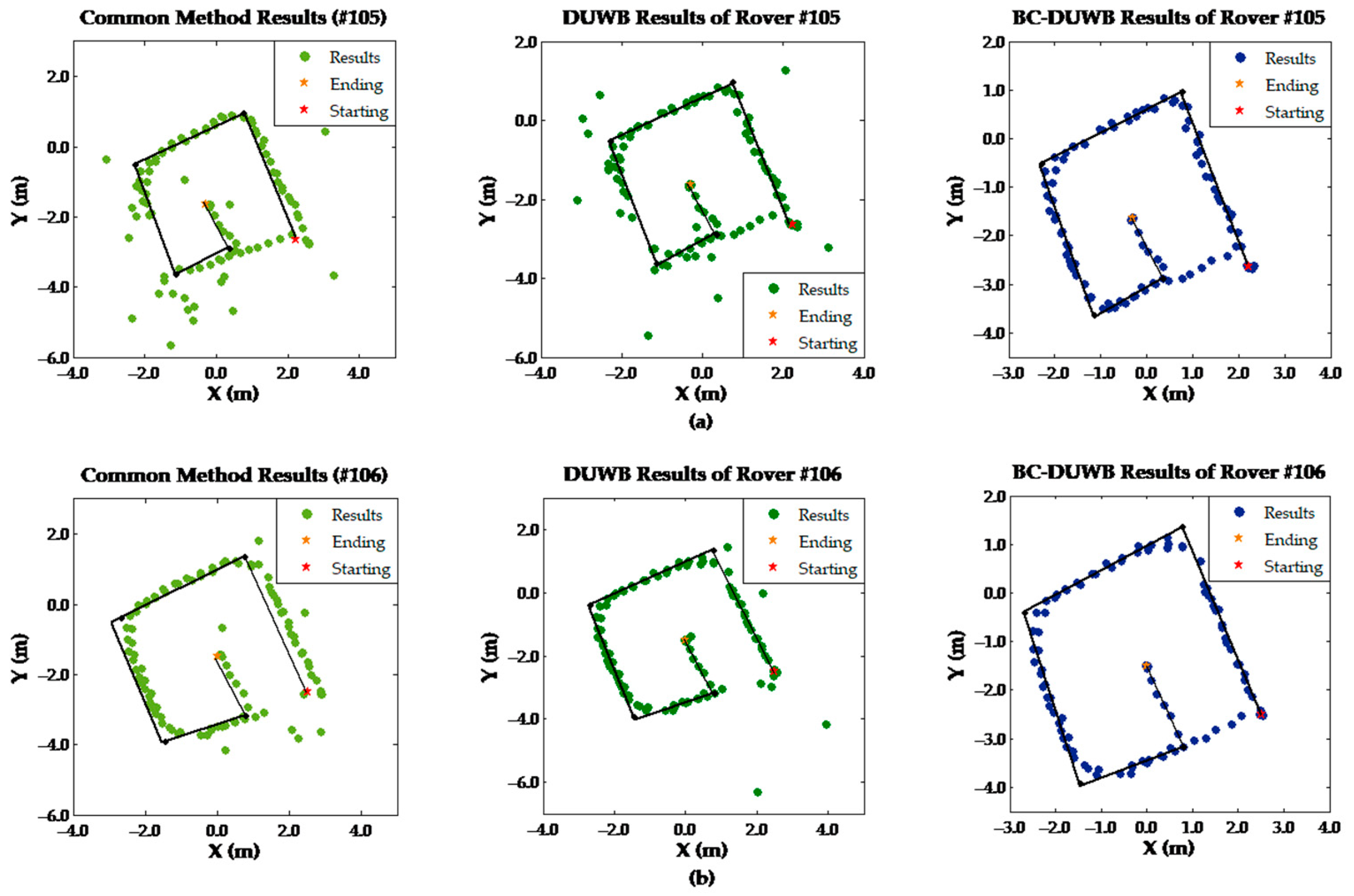
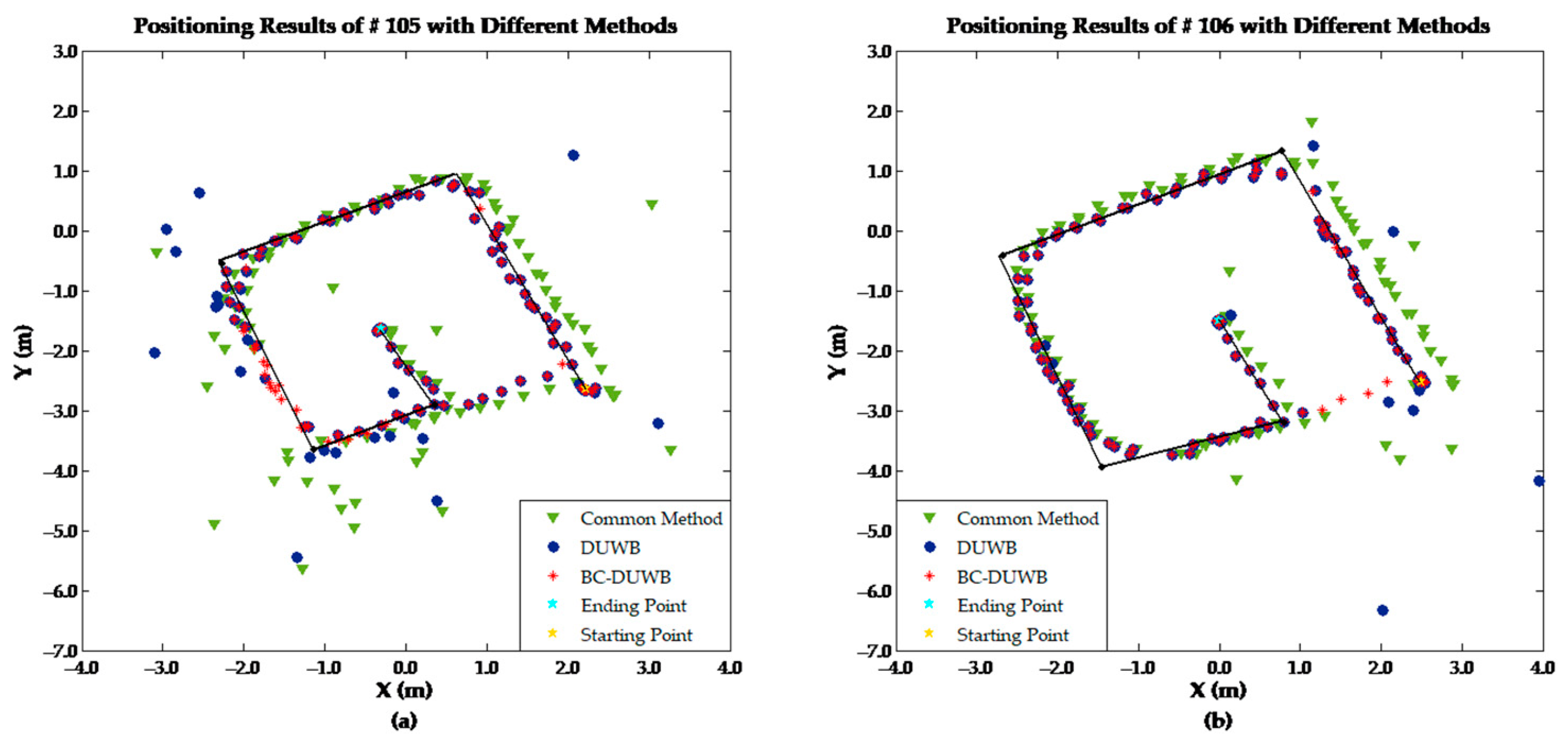
- (2)
In the dynamic experiment, the results of BC-DUWB are not only closer to the reference trajectory than adopting the common method, but the coordinates of the starting point and ending point are almost consistent with the truth value. Furthermore, the gross error and large random error are also eliminated, so that the maximum deviation is less than 5 cm.
However, there are still some deficiencies in this article, such as the fact that the principle of anchor nodes arrangement has not been studied. Therefore, various arrangement methods will be compared in the near future. In addition, the trolley velocity in the dynamic experiment is slow, and lacks tests for fast-moving scenes. The dynamic analysis model needs to be improved to adapt to the fast-moving application scenarios. UWB has a strong penetration ability in some cases, such as in wood and stones, and the penetration error can be corrected by modeling. However, it has a weak ability to penetrate water and metal. Therefore, of the expected errors in this paper, other UWB errors including penetration error and NLOS will be the next research focus. These factors will affect the validity of the results. Since the main purpose of this paper is to verify the feasibility of the method, there is no modeling of penetration errors or NLOS in the algorithm. For the applicability of the algorithm, the algorithm should be optimized to adapt to the NLOS environment in the future. Furthermore, the anchor nodes will be placed in different rooms and conduct networking experiments in practical environments, such as large scene factories and underground projects.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}