A Sensor-Network-Supported Mobile-Agent-Search Strategy for Wilderness Rescue



Abstract
1. Introduction
2. The WiSAR Planning Problem
2.1. Search Scenario and Assumptions
2.2. Problem Formulation
3. The Proposed Search-Planning Method
3.1. Initial Planning
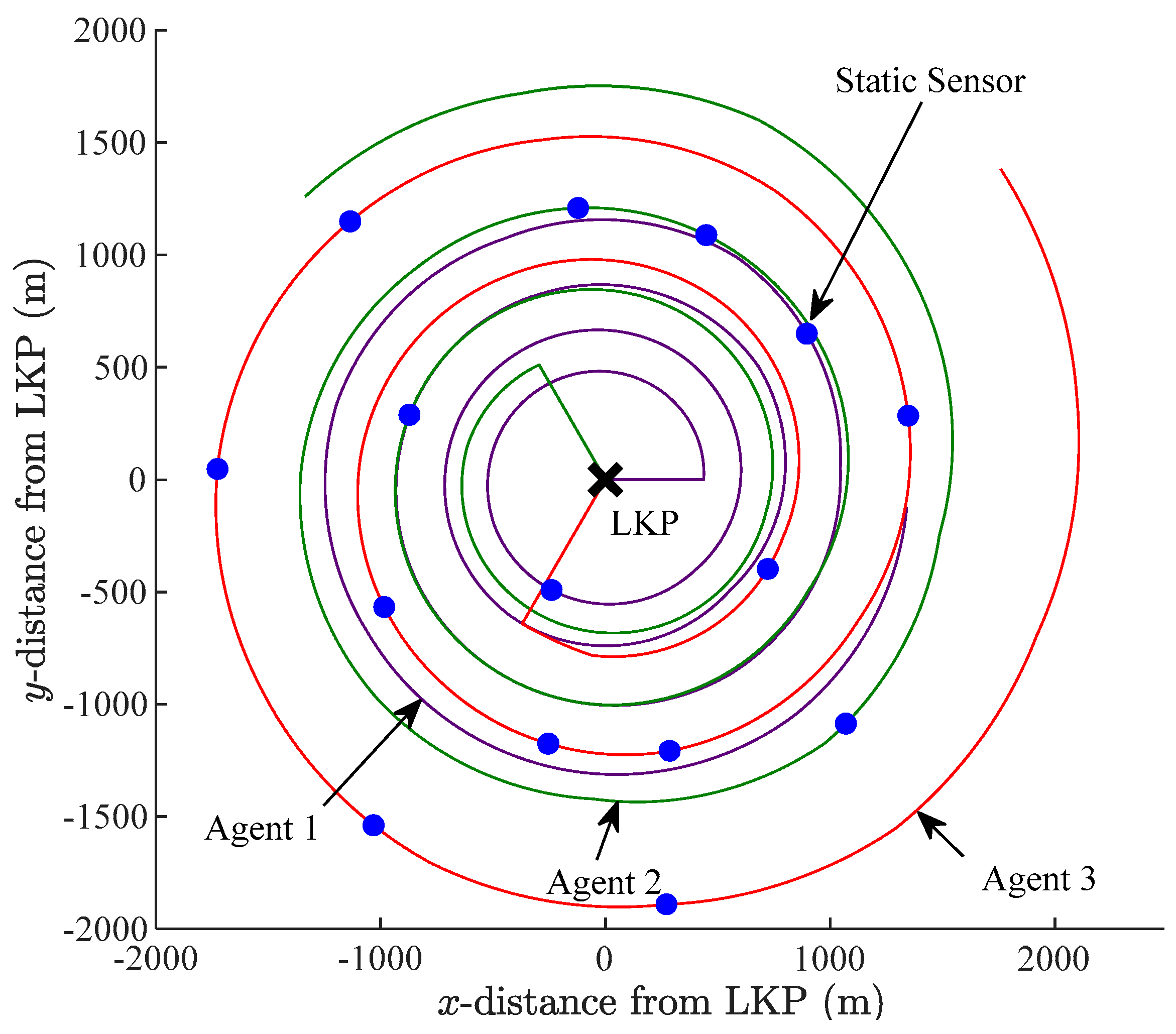
3.1.1. Agent-Trajectory Planning
- Iso-probability curves are selected by maximizing a weighted sum of the success rate and search time metrics. Agents are assigned to these curves to achieve a balanced distribution of search effort across all curves.
- After a set of curves is selected, agent trajectories are generated. Agents remain on their respective assigned curve, as each curve propagates outward with time [21].
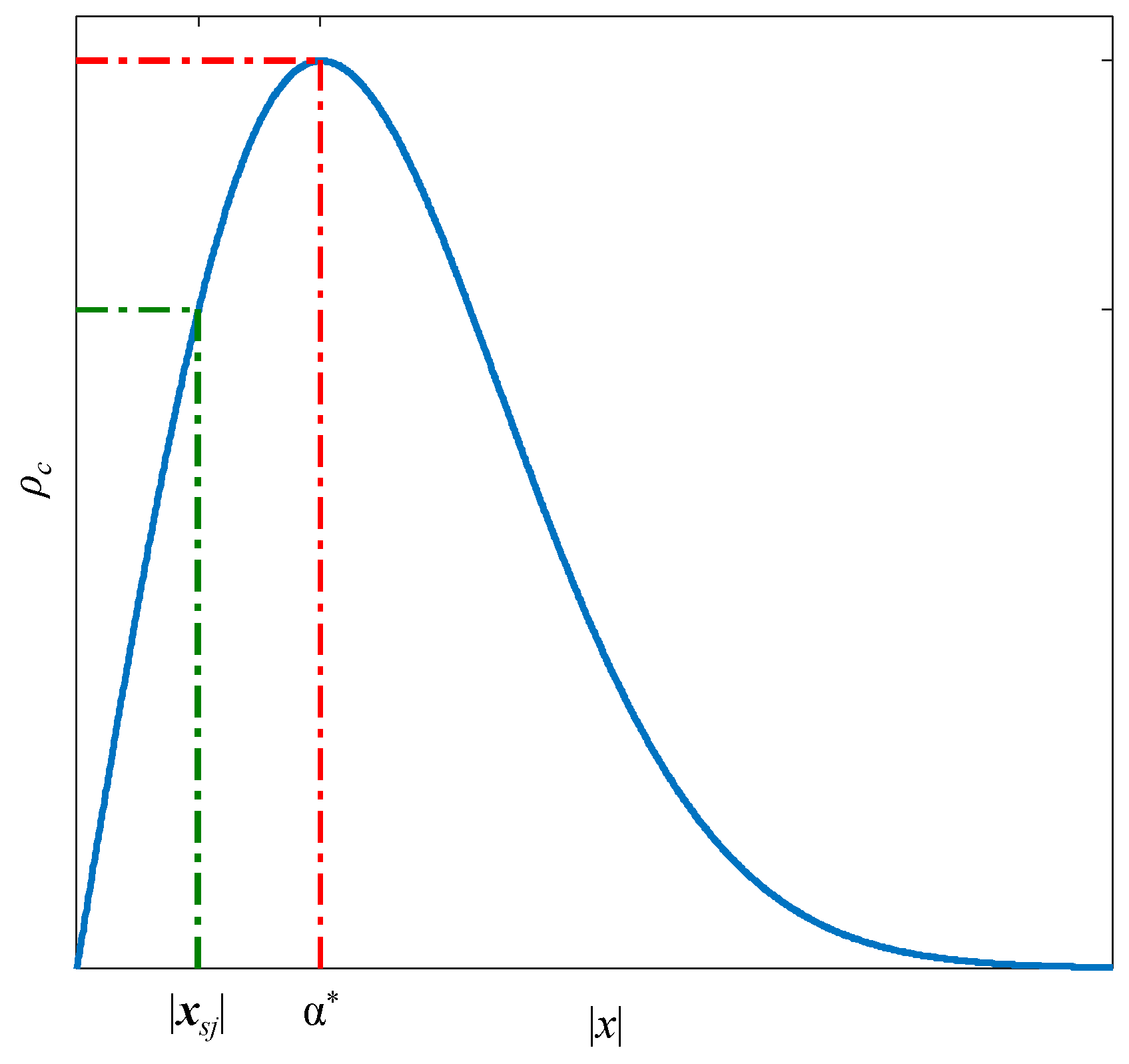
3.1.2. Sensor-Network Deployment Planning
Optimization Metric
Validation of the Optimization Metric
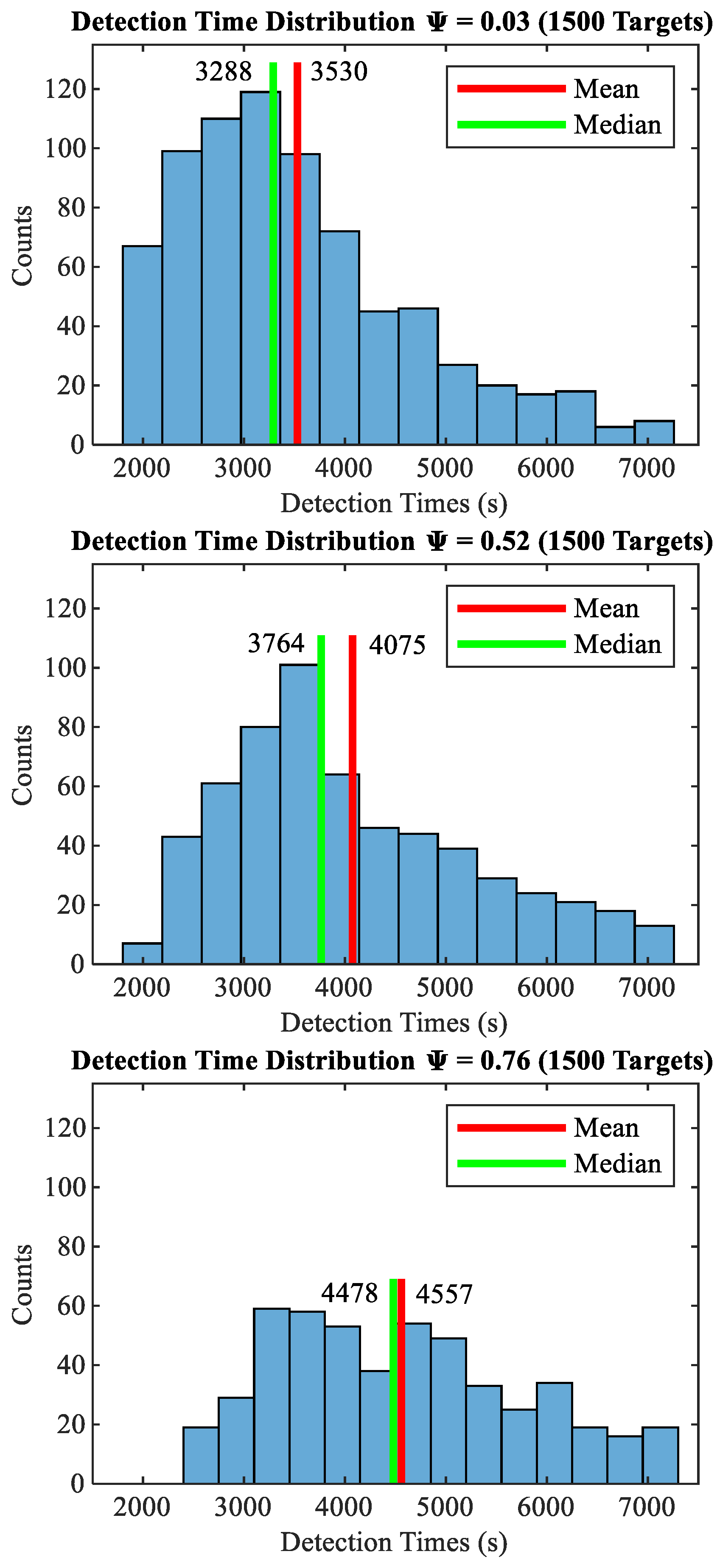
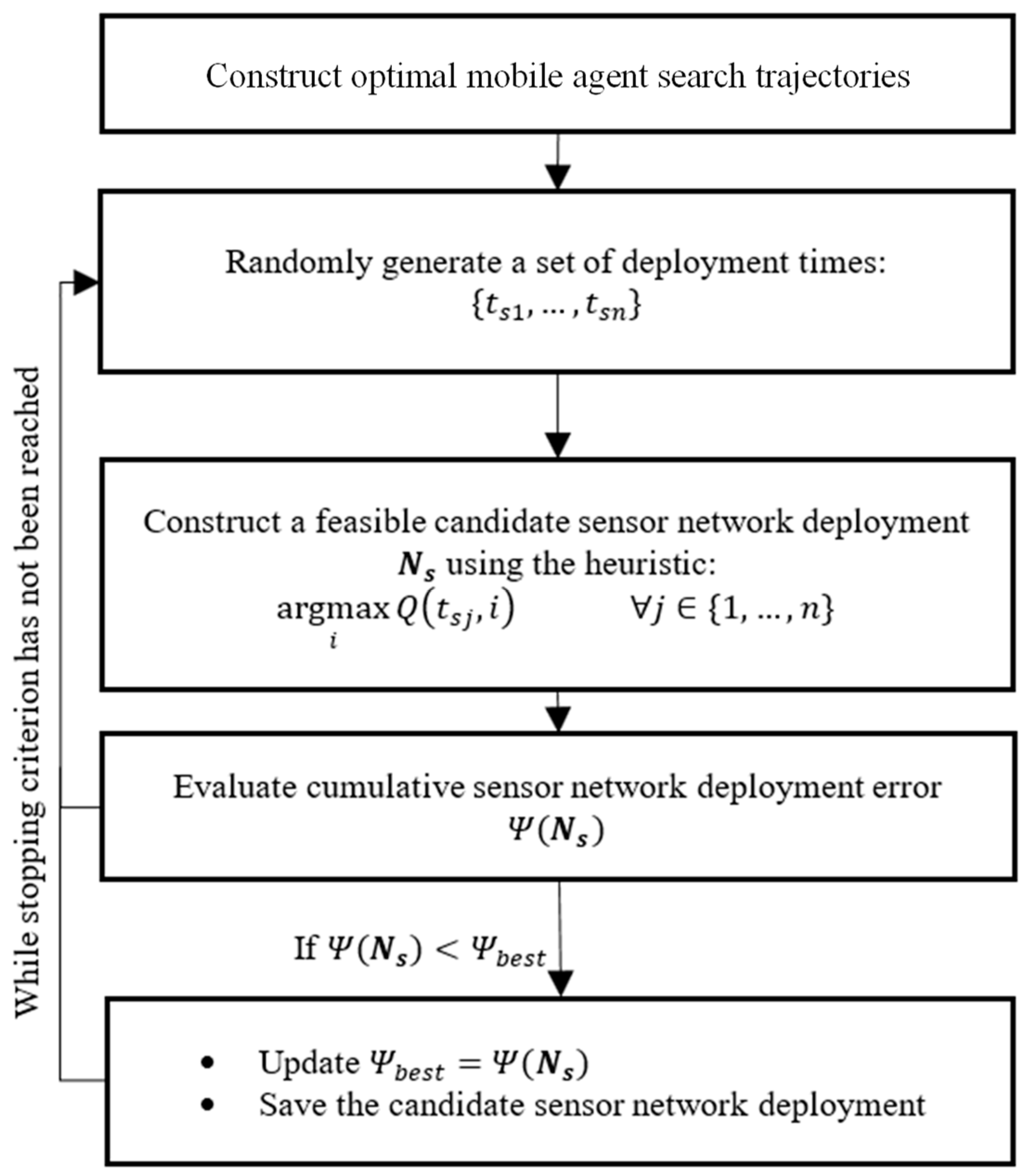
Optimization Algorithm
3.2. Re-Planning
4. Simulated Search Examples
4.1. Example 1: Target Search
4.2. Example 2: Target Search with Re-Planning
5. Comparative Study
5.1. Two Comparative Experiments
5.2. Large Sets of Simulations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Berger, J.; Lo, N. An innovative multi-agent search-and-rescue path planning approach. Comput. Oper. Res. 2015, 53, 24–31. [Google Scholar] [CrossRef]
- Doherty, P.J.; Guo, Q.; Doke, J.; Ferguson, D. An analysis of probability of area techniques for missing persons in Yosemite National Park. Appl. Geogr. 2014, 47, 99–110. [Google Scholar] [CrossRef]
- Israel, M.; Khmelnitsky, E.; Kagan, E. Search for a mobile target by ground vehicle on a topographic terrain. In Proceedings of the IEEE Convention of Electrical & Electronics Engineers in Israel, Eilat, Israel, 14–17 November 2012; pp. 1–5. [Google Scholar]
- Macwan, A.; Nejat, G.; Benhabib, B. Optimal Deployment of Robotic Teams for Autonomous Wilderness Search and Rescue. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4544–4549. [Google Scholar]
- Wong, E.-M.; Bourgault, F.; Furukawa, T. Multi-vehicle Bayesian Search for Multiple Lost Targets. In Proceedings of the IEEE Robotics and Automation Society’s, Barcelona, Spain, 18–22 April 2005; pp. 3169–3174. [Google Scholar]
- Champagne, L.; Carl, E.G.; Hill, R. Search theory, agent-based simulation, and u-boats in the Bay of Biscay. In Proceedings of the Simulation Conference, New Orleans, LA, USA, 7–10 December 2003; pp. 991–998. [Google Scholar]
- Arora, A.; Dutta, P.; Bapat, S.; Kulathumani, V.; Zhang, H.; Naik, V.; Mittal, V.; Cao, H.; Demirbas, M.; Gouda, M.; et al. A line in the sand: A wireless sensor network for target detection, classification, and tracking. Comput. Netw. 2004, 46, 605–634. [Google Scholar] [CrossRef]
- Kehagias, A.; Mitsche, D.; Prałat, P. Cops and invisible robbers: The cost of drunkenness. Theor. Comput. Sci. 2013, 481, 100–120. [Google Scholar] [CrossRef]
- Lin, L.; Goodrich, M.A. Hierarchical heuristic search using a gaussian mixture model for UAV coverage planning. IEEE Trans. Cybern. 2014, 44, 2532–2544. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Meng, Q.; Chung, P.W.H. A Heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario. IEEE Trans. Cybern. 2016, 46, 902–915. [Google Scholar] [CrossRef] [PubMed]
- Keller, C.M. Applying optimal search theory to inland SAR: Steve Fossett case study. In Proceedings of the Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar]
- Hohzaki, R. A cooperative game in search theory. Nav. Res. Logist. NRL 2009, 56, 264–278. [Google Scholar] [CrossRef]
- Benkoski, S.J.; Monticino, M.G.; Weisinger, J.R. A survey of the search theory literature. Nav. Res. Logist. NRL 1991, 38, 469–494. [Google Scholar] [CrossRef]
- Grundel, D.A. Searching for a moving target: optimal path planning. In Proceedings of the IEEE Netw. Sens. Control, Tucson, AZ, USA, 19–22 March 2005; pp. 867–872. [Google Scholar]
- Goodrich, M.A.; Morse, B.S.; Engh, C.; Cooper, J.L.; Adams, J.A. Towards using Unmanned Aerial Vehicles (UAVs) in Wilderness Search and Rescue: Lessons from field trials. Interact. Stud. 2009, 10, 453–478. [Google Scholar]
- Ding, Y.F.; Pan, Q. Path planning for mobile robot search and rescue based on improved ant colony optimization algorithm. Appl. Mech. Mater. 2011, 66–68, 1039–1044. [Google Scholar] [CrossRef]
- Xiao, H.; Cui, R.; Xu, D. A sampling-based bayesian approach for cooperative multiagent online search with resource constraints. IEEE Trans. Cybern. 2017, 48, 1773–1785. [Google Scholar] [CrossRef] [PubMed]
- Pack, D.J.; DeLima, P.; Toussaint, G.J.; York, G. Cooperative control of UAVs for localization of intermittently emitting mobile targets. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2009, 39, 959–970. [Google Scholar] [CrossRef] [PubMed]
- Agcayazi, M.T.; Cawi, E.; Jurgenson, A.; Ghassemi, P.; Cook, G. ResQuad: Toward a semi-autonomous wilderness search and rescue unmanned aerial system. In Proceedings of the International Conference Unmanned Aircraft Syst., Arlington, VA, USA, 7–10 June 2016; pp. 898–904. [Google Scholar]
- Macwan, A.; Vilela, J.; Nejat, G.; Benhabib, B. Multi-robot deployment for wilderness search and rescue. Int. J. Robot. Autom. 2016, 31, 10.2316/Journal.206.2016.1.206–4366. [Google Scholar] [CrossRef]
- Macwan, A.; Vilela, J.; Nejat, G.; Benhabib, B. A multirobot path-planning strategy for autonomous wilderness search and rescue. IEEE Trans. Cybern. 2015, 45, 1784–1797. [Google Scholar] [CrossRef] [PubMed]
- Rogge, J.A.; Aeyels, D. Multi-robot coverage to locate fixed and moving targets. In Proceedings of the Control Application Intelligence Control, St. Petersburg, Russia, 8–10 July 2009; pp. 902–907. [Google Scholar]
- Lavis, B.; Furukawa, T.; Durrant Whyte, H.F. Dynamic space reconfiguration for Bayesian search and tracking with moving targets. Auton. Robots 2008, 24, 387–399. [Google Scholar] [CrossRef]
- Sung, Y.; Furukawa, T. Information measure for the optimal control of target searching via the grid-based method. In Proceedings of the International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 2075–2080. [Google Scholar]
- Yuan, H.; Xiao, C.; Zhan, W.; Wang, Y.; Shi, C.; Ye, H.; Jiang, K.; Ye, Z.; Zhou, C.; Wen, Y.; et al. Target detection, positioning and tracking using new UAV gas sensor systems: Simulation and analysis. J. Intell. Robot. Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Hanna, D.; Ferworn, A.; Lukaczyn, M.; Abhari, A.; Lum, J. Using Unmanned Aerial Vehicles (UAVs) in locating wandering patients with dementia. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 23–26 April 2018; pp. 809–815. [Google Scholar]
- Amaldi, E.; Capone, A.; Cesana, M.; Filippini, I. Design of wireless sensor networks for mobile target detection. IEEEACM Trans. Netw. 2012, 20, 784–797. [Google Scholar] [CrossRef]
- Clouqueur, T.; Phipatanasuphorn, V.; Ramanathan, P.; Saluja, K.K. Sensor deployment strategy for detection of targets traversing a region. Mob. Netw. Appl. 2003, 8, 453–461. [Google Scholar] [CrossRef]
- Phipatanasuphorn, V.; Ramanathan, P. Vulnerability of sensor networks to unauthorized traversal and monitoring. IEEE Trans. Comput. 2004, 53, 364–369. [Google Scholar] [CrossRef]
- Lazos, L.; Poovendran, R.; Ritcey, J.A. Detection of mobile targets on the plane and in space using heterogeneous sensor networks. Wirel. Netw. 2009, 15, 667–690. [Google Scholar] [CrossRef]
- Yoon, Y.; Kim, Y.-H. An Efficient Genetic Algorithm for maximum coverage deployment in wireless sensor networks. IEEE Trans. Cybern. 2013, 43, 1473–1483. [Google Scholar] [CrossRef]
- Mukherjee, K.; Gupta, S.; Ray, A.; Wettergren, T.A. Statistical-mechanics-inspired optimization of sensor field configuration for detection of mobile targets. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2011, 41, 783–791. [Google Scholar] [CrossRef]
- Karatas, M.; Craparo, E.; Akman, G. Bistatic sonobuoy deployment strategies for detecting stationary and mobile underwater targets. Nav. Res. Logist. NRL 0 2018, 65, 331–346. [Google Scholar] [CrossRef]
- Vilela, J.; Kashino, Z.; Ly, R.; Nejat, G.; Benhabib, B. A dynamic approach to sensor network deployment for mobile-target detection in unstructured, expanding search areas. IEEE Sens. J. 2016, 16, 4405–4417. [Google Scholar] [CrossRef]
- Kashino, Z.; Kim, J.Y.; Nejat, G.; Benhabib, B. Spatiotemporal adaptive optimization of a static-sensor network via a non-parametric estimation of target location likelihood. IEEE Sens. J. 2017, 17, 1479–1492. [Google Scholar] [CrossRef]
- Shue, S.; Conrad, J.M. A survey of robotic applications in wireless sensor networks. In Proceedings of the IEEE Southeastcon, Jacksonville, FL, USA, 4–7 April 2013; pp. 1–5. [Google Scholar]
- Lambrou, T.P.; Panayiotou, C.G.; Felici, S.; Beferull, B. Exploiting Mobility for Efficient Coverage in Sparse Wireless Sensor Networks. Wirel. Pers. Commun. 2009, 54, 187–201. [Google Scholar] [CrossRef]
- Suzuki, T.; Sugizaki, R.; Kawabata, K.; Hada, Y.; Tobe, Y. Autonomous deployment and restoration of sensor network using mobile robots. Int. J. Adv. Robot. Syst. 2010, 7, 105–114. [Google Scholar] [CrossRef]
- Li, X.; Fletcher, G.; Nayak, A.; Stojmenovic, I. Randomized carrier-based sensor relocation in wireless sensor and robot networks. Ad Hoc Netw. 2013, 11, 1951–1962. [Google Scholar] [CrossRef]
- Li, X.; Falcon, R.; Nayak, A.; Stojmenovic, I. Servicing wireless sensor networks by mobile robots. IEEE Commun. Mag. 2012, 50, 147–154. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, C.H. Robot-assisted sensor network deployment and data collection. In Proceedings of the International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FI, USA, 20–23 June 2007; pp. 467–472. [Google Scholar]
- Deshpande, N.; Grant, E.; Henderson, T.C. Target localization and autonomous navigation using wireless sensor networks—A pseudogradient algorithm approach. IEEE Syst. J. 2014, 8, 93–103. [Google Scholar] [CrossRef]
- Woiceshyn, K.; Kashino, Z.; Nejat, G.; Benhabib, B. Vehicle routing for resource management in time-phased deployment of sensor networks. IEEE Trans. Autom. Sci. Eng. 2018, 16, 716–728. [Google Scholar] [CrossRef]
- Mateo, D.; Horsevad, N.; Hassani, V.; Chamanbaz, M.; Bouffanais, R. Optimal network topology for responsive collective behavior. Sci. Adv. 2019, 5, eaau0999. [Google Scholar] [CrossRef]
- Wagner, T.; Lesser, V. Evolving real-time local agent control for large-scale multi-agent systems. In Intelligent Agents VIII, Proceedings of the International Workshop on Agent Theories, Architectures, and Languages, Seattle, WA, USA, 1–3 August 2001; Meyer, J.-J.C., Tambe, M., Eds.; Springer: Berlin, Heidelberg, Germany, 2002; pp. 51–68. [Google Scholar] [CrossRef]
- Long, M.; Su, H.; Liu, B. Group controllability of two-time-scale multi-agent networks. J. Frankl. Inst. 2018, 355, 6045–6061. [Google Scholar] [CrossRef]
- Lin, L.; Goodrich, M.A. A bayesian approach to modeling lost person behaviors based on terrain features in wilderness search and rescue. Comput. Math. Organ. Theory 2010, 16, 300–323. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Brown, T.X.; Bettstetter, C. Multi-objective UAV path planning for search and rescue. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 5569–5574. [Google Scholar]
- Niedzielski, T.; Jurecka, M.; Miziński, B.; Remisz, J.; Ślopek, J.; Spallek, W.; Witek-Kasprzak, M.; Kasprzak, Ł.; Świerczyńska-Chlaściak, M. A real-time field experiment on search and rescue operations assisted by unmanned aerial vehicles. J. Field Robot. 2018, 35, 906–920. [Google Scholar] [CrossRef]
- Liu, Y.; Nejat, G. Multirobot cooperative learning for semiautonomous control in urban search and rescue applications. J. Field Robot. 2016, 33, 512–536. [Google Scholar] [CrossRef]
- Ramirez-Paredes, J.P.; Doucette, E.A.; Curtis, J.W.; Gans, N.R. Urban target search and tracking using a UAV and unattended ground sensors. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 2401–2407. [Google Scholar]
- Yu, H.; Meier, K.; Argyle, M.; Beard, R.W. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles. IEEEASME Trans. Mechatron. 2015, 20, 541–552. [Google Scholar] [CrossRef]
- Zhang, Z.; Nejat, G.; Guo, H.; Huang, P. A novel 3D sensory system for robot-assisted mapping of cluttered urban search and rescue environments. Intell. Serv. Robot. 2011, 4, 119–134. [Google Scholar] [CrossRef]
- Hong, A.; Igharoro, O.; Liu, Y.; Niroui, F.; Nejat, G.; Benhabib, B. Investigating human-robot teams for learning-based semi-autonomous control in urban search and rescue environments. J. Intell. Robot. Syst. 2019, 94, 669–686. [Google Scholar] [CrossRef]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and pursuit-evasion in mobile robotics. Auton. Robots 2011, 31, 299–316. [Google Scholar] [CrossRef]
- Zheng, J.; Yu, H.; Liang, W.; Zeng, P. Probabilistic strategies to coordinate multiple robotic pursuers in pursuit-evasion games. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Sanya, China, 15–18 December 2007; pp. 559–564. [Google Scholar]
- Körner, F.; Speck, R.; Göktogan, A.H.; Sukkarieh, S. Autonomous airborne wildlife tracking using radio signal strength. In Proceedings of the IEEE/RSJ International Workshop on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 107–112. [Google Scholar]
- Bakhtari, A.; Naish, M.D.; Eskandari, M.; Croft, E.A.; Benhabib, B. Active-vision-based multisensor surveillance—An implementation. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2006, 36, 668–680. [Google Scholar] [CrossRef]
- Koester, R.J. Lost Person Behavior: A Search and Rescue Guide on Where to Look for Land, Air and Water; dbS Productions: Charlottesville, VA, USA, 2008. [Google Scholar]
- Croft, E.A.; Benhabib, B.; Fenton, R.G. Near-time optimal robot motion planning for on-line applications. J. Robot. Syst. 1995, 12, 553–567. [Google Scholar] [CrossRef]
- Burkard, R.M.; Dell’Amico, S. Martello Assignment Problems; SIAM, Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2009. [Google Scholar]
- Kashino, Z.; Nejat, G.; Benhabib, B. A hybrid strategy for target search using static and mobile sensors. IEEE Trans. Cybern. 2018, 1–13. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chong Lee Shin, J.; Kashino, Z.; Nejat, G.; Benhabib, B. A Sensor-Network-Supported Mobile-Agent-Search Strategy for Wilderness Rescue. Robotics 2019, 8, 61. https://doi.org/10.3390/robotics8030061
Chong Lee Shin J, Kashino Z, Nejat G, Benhabib B. A Sensor-Network-Supported Mobile-Agent-Search Strategy for Wilderness Rescue. Robotics. 2019; 8(3):61. https://doi.org/10.3390/robotics8030061
Chicago/Turabian StyleChong Lee Shin, Jason, Zendai Kashino, Goldie Nejat, and Beno Benhabib. 2019. "A Sensor-Network-Supported Mobile-Agent-Search Strategy for Wilderness Rescue" Robotics 8, no. 3: 61. https://doi.org/10.3390/robotics8030061
APA StyleChong Lee Shin, J., Kashino, Z., Nejat, G., & Benhabib, B. (2019). A Sensor-Network-Supported Mobile-Agent-Search Strategy for Wilderness Rescue. Robotics, 8(3), 61. https://doi.org/10.3390/robotics8030061