A Tactile-Based Wire Manipulation System for Manufacturing Applications



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
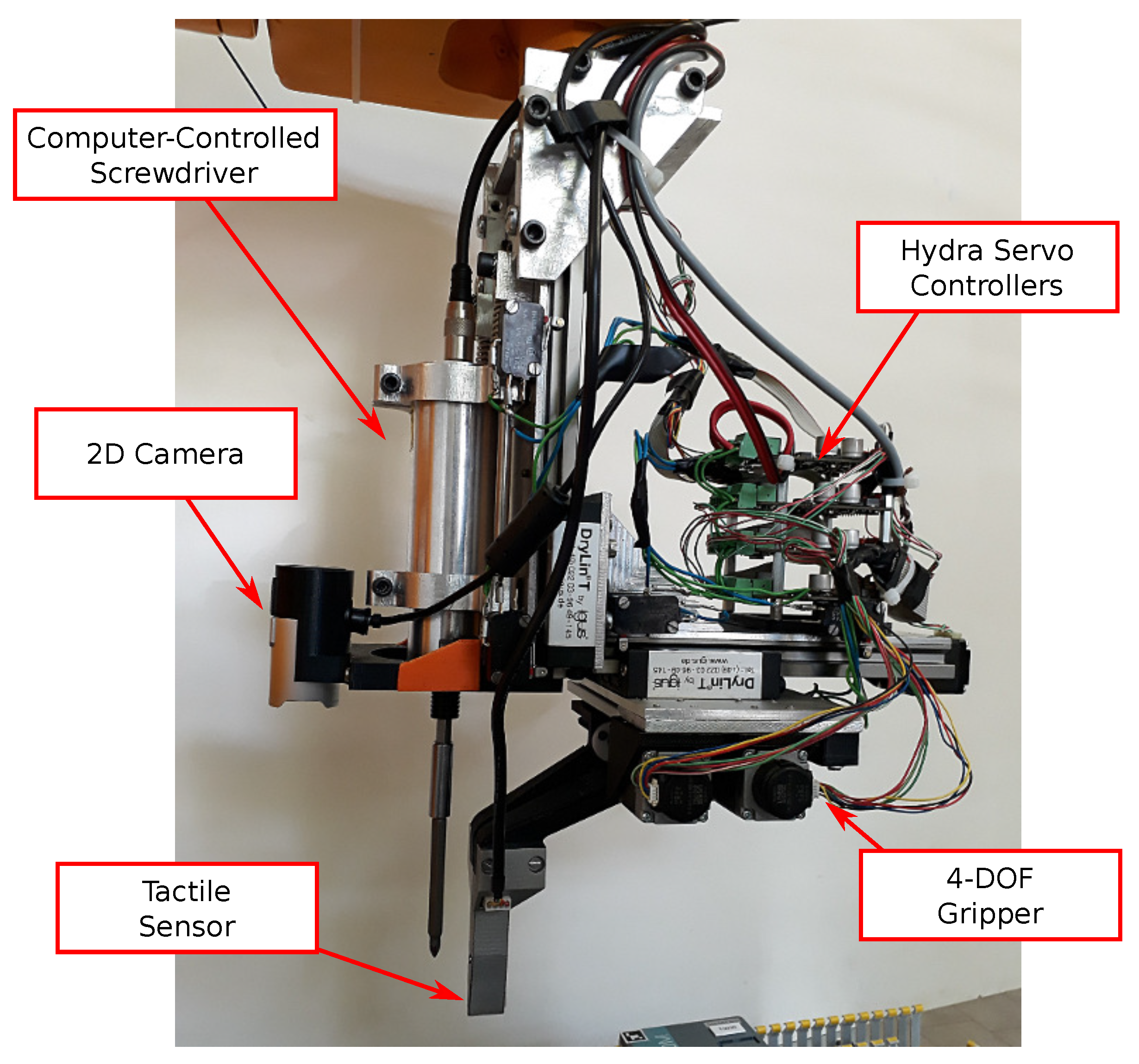
2. The Tactile Sensor and the Gripper
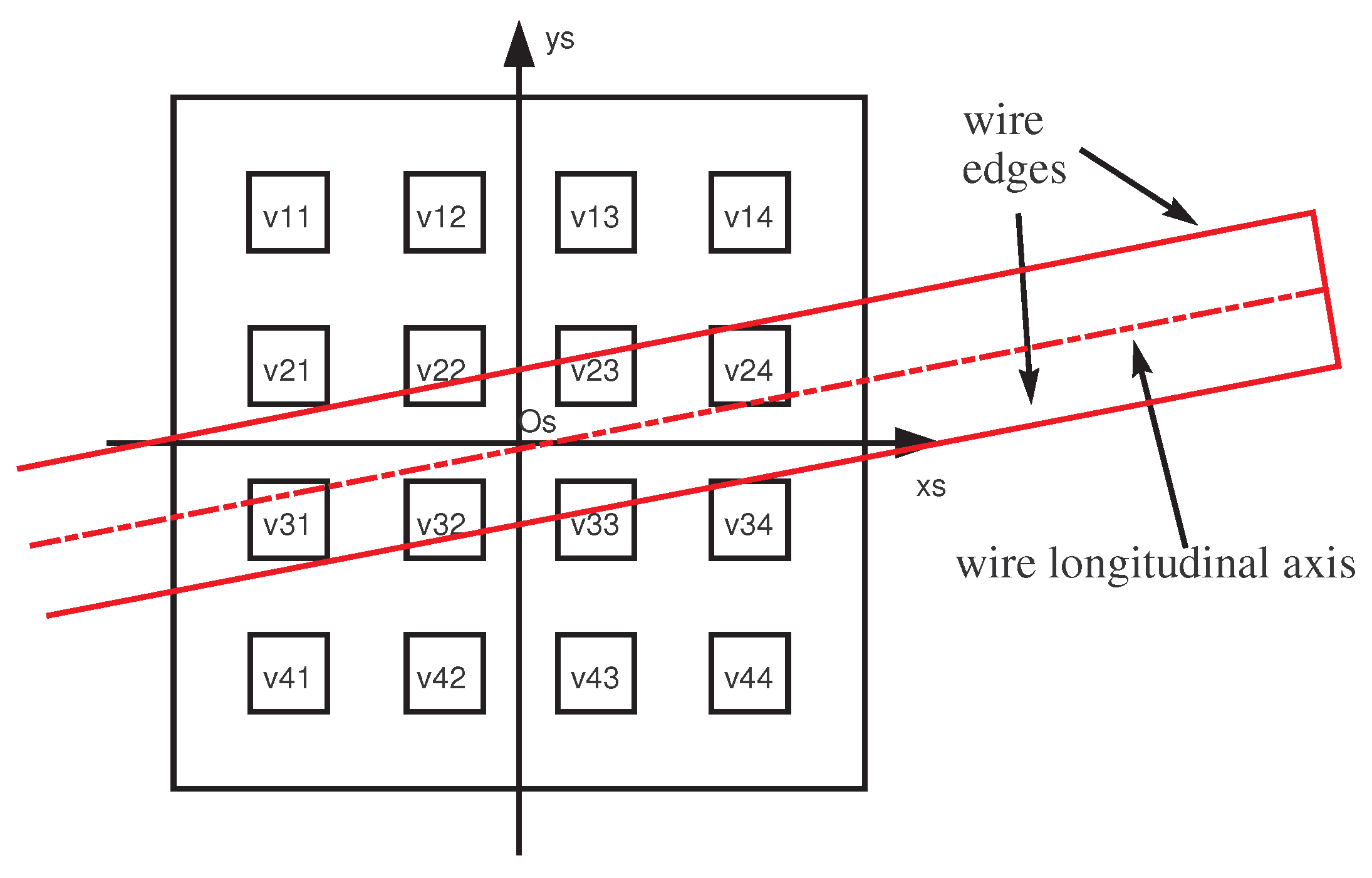
3. Wire Shape Estimation
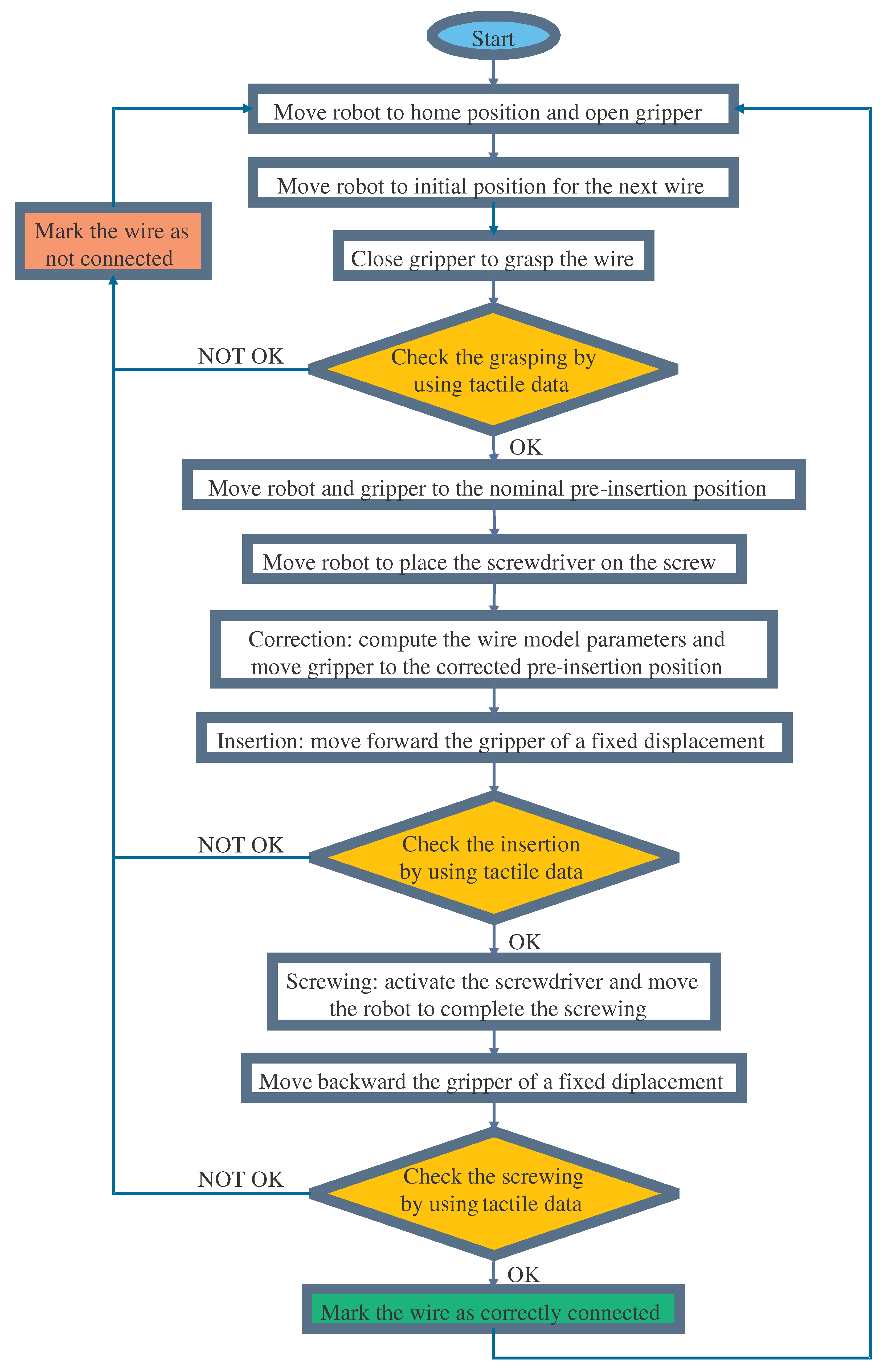
4. The Insertion Task
5. Assessment of Wire Shape Estimation and Expected Success Rate
6. Experiments
6.1. Estimation Quality and Expected SR
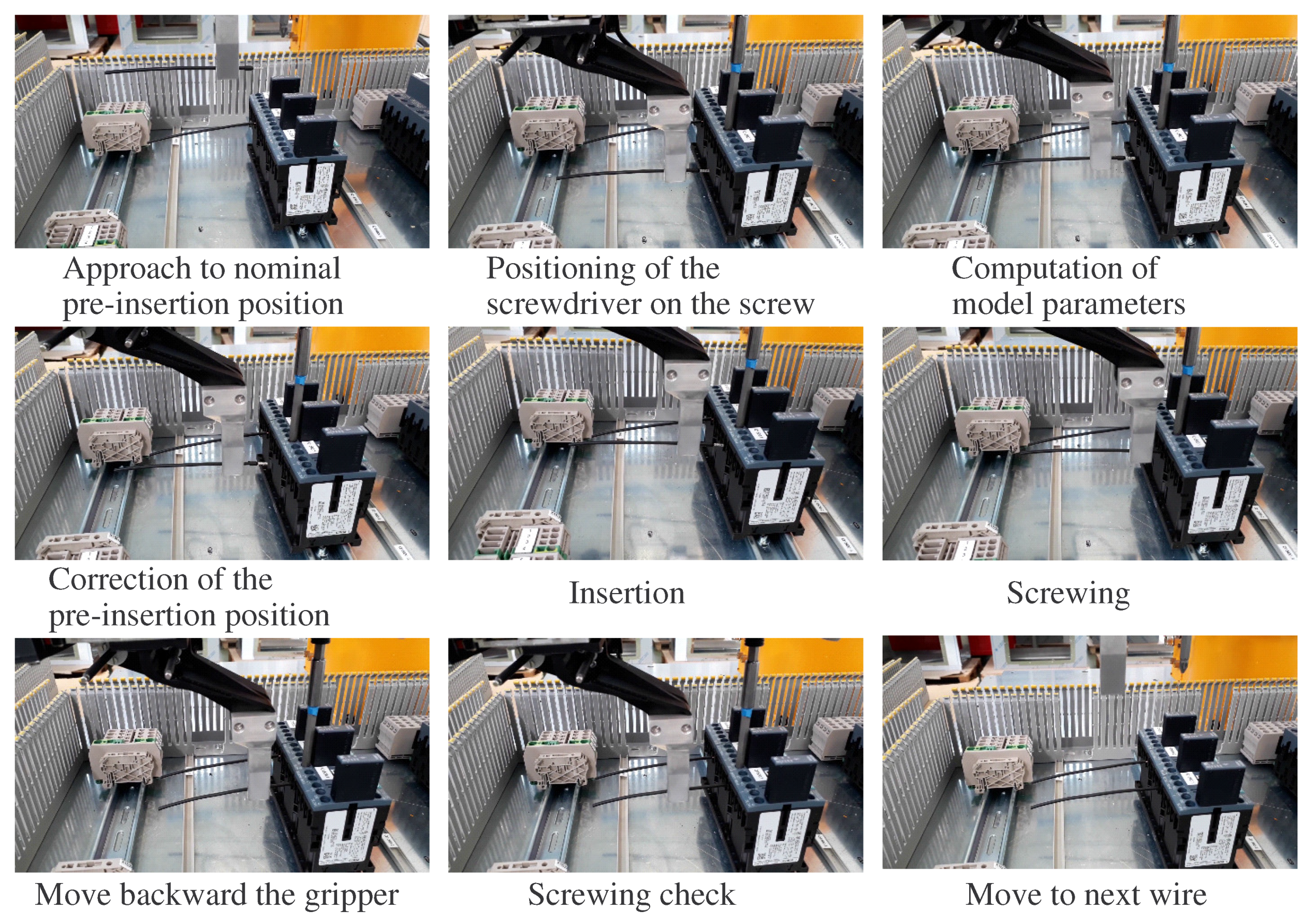
6.2. The Insertion Task Implementation
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Busi, M.; Cirillo, A.; De Gregorio, D.; Indovini, M.; De Maria, G.; Melchiorri, C.; Natale, C.; Palli, G.; Pirozzi, S. The WIRES Experiment: Tools and Strategies for Robotized Switchgear Cabling. Procedia Manuf. 2017, 11, 355–363. [Google Scholar] [CrossRef]
- Cirillo, A.; De Maria, G.; Natale, C.; Pirozzi, S. Design and Evaluation of Tactile Sensors for the Estimation of Grasped Wire Shape. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Munich, Germany, 3–7 July 2017; pp. 490–496. [Google Scholar]
- De Gregorio, D.; Zanella, R.; Palli, G.; Pirozzi, S.; Melchiorri, C. Integration of Robotic Vision and Tactile Sensing for Wire-Terminal Insertion Tasks. IEEE Trans. Autom. Sci. Eng. 2018, in press. [Google Scholar] [CrossRef]
- Saxena, A.; Driemeyer, J.; Ng, A.Y. Robotic Grasping of Novel Objects using Vision. Int. J. Robot. Res. 2008, 27, 157–173. [Google Scholar] [CrossRef]
- Allen, P.K. Integrating Vision and Touch for Object Recognition Tasks. Int. J. Robot. Res. 1988, 7, 15–33. [Google Scholar] [CrossRef]
- Björkman, M.; Bekiroglu, Y.; Högman, V.; Kragic, D. Enhancing visual perception of shape through tactile glances. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 3180–3186. [Google Scholar]
- Bimbo, J.; Seneviratne, L.D.; Althoefer, K.; Liu, H. Combining touch and vision for the estimation of an object’s pose during manipulation. In Proceedings of the International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4021–4026. [Google Scholar]
- Bhattacharjee, T.; Shenoi, A.A.; Park, D.; Rehg, J.M.; Kemp, C.C. Combining tactile sensing and vision for rapid haptic mapping. In Proceedings of the International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 1200–1207. [Google Scholar]
- Lepora, N.F.; Aquilina, K.; Cramphorn, L. Exploratory Tactile Servoing With Active Touch. IEEE Robot. Autom. Lett. 2017, 2, 1156–1163. [Google Scholar] [CrossRef]
- Aggarwal, A.; Kirchner, F. Object Recognition and Localization: The Role of Tactile Sensors. Sensors 2014, 14, 3227–3266. [Google Scholar] [CrossRef] [PubMed]
- Yamaguchi, A.; Atkeson, C.G. Combining finger vision and optical tactile sensing: Reducing and handling errors while cutting vegetables. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 1045–1051. [Google Scholar]
- Pirozzi, S.; Natale, C. Tactile-based manipulation of wires for switchgear assembly. IEEE/ASME Trans. Mechatron. 2018, 23, 2650–2661. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palli, G.; Pirozzi, S. A Tactile-Based Wire Manipulation System for Manufacturing Applications. Robotics 2019, 8, 46. https://doi.org/10.3390/robotics8020046
Palli G, Pirozzi S. A Tactile-Based Wire Manipulation System for Manufacturing Applications. Robotics. 2019; 8(2):46. https://doi.org/10.3390/robotics8020046
Chicago/Turabian StylePalli, Gianluca, and Salvatore Pirozzi. 2019. "A Tactile-Based Wire Manipulation System for Manufacturing Applications" Robotics 8, no. 2: 46. https://doi.org/10.3390/robotics8020046
APA StylePalli, G., & Pirozzi, S. (2019). A Tactile-Based Wire Manipulation System for Manufacturing Applications. Robotics, 8(2), 46. https://doi.org/10.3390/robotics8020046