1. Introduction
Robots are increasingly used in human-facing public and private environments. The movement of such agents will inherently change the experience of these environments for any human in them. Our project draws particular inspiration from an in-home, elderly population who may feel unsafe in direct proximity to the type of motion generated by minimum energy flight paths of UAVs, for example. In such a context, a well-designed robotic system should communicate with people in a manner befitting the environment, matching that of their human counterparts and transmitting information about the system’s internal state. That is, appropriate movement needs to be choreographed to befit context.
Robotic platforms can communicate with people through variations in language, visual displays, sound, and motion. This latter method is more immediate and can be carried out in parallel with other functions. This is analogous to how people use complex gestures or postural changes for everyday interactions [
1]. Such a channel has been used for symbolic communication between mobile robots and human users through gestures [
2] and facial expressions [
3]. Robots that communicate well through these channels may be termed expressive. Examples of service robots are AMIGO [
4], designed to carry out tasks like serving patients in the hospital and ROBOSEM [
5], used as a telepresent English tutor in an educational setting. Robots are also used in domestic environments to assist with housework, have social interactions, and provide in-home care for the elderly [
6,
7,
8]. There, a high number of degrees of freedom create redundant options in motion patterns in order to communicate urgency or calmness in the state of the robot, but how do we leverage the movement of low degree of freedom, non-humanlike robots, like UAVs or UGVs shown in
Figure 1 during assigned tasks?
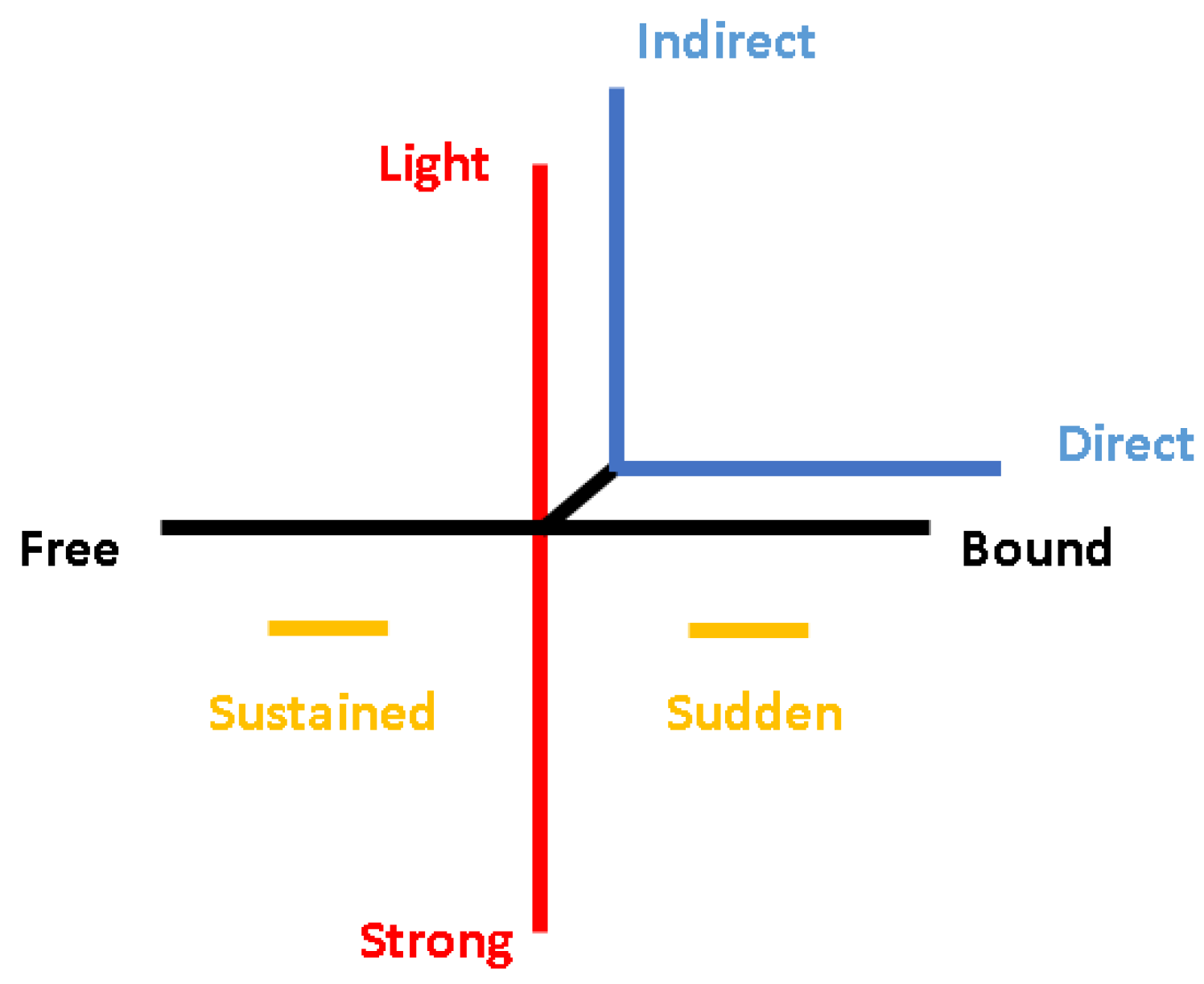
Laban movement analysis (LMA) is a method and language to observe, describe, notate, and interpret varieties of human movement, part of a larger system called the Laban/Bartenieff movement system (LBMS). Effort is an LMA component that deals with dynamic qualities of the movement, and the inner attitude or intent behind a movement [
9]. In this section, we will present how we’ve adapted the LMA component of Effort into our method to generate variable, and thus expressive, robotic motion. We will capitalize words which are being used in the LMA taxonomy to distinguish them from colloquial use. The pedagogy used to teach Effort utilizes word banks for movers to develop personal inroads to their perception and experience of movement. This technique may also be used to develop a descriptive set of words that can be used to evaluate the perception of generated motion profiles on general users. In this paper, we will use a master teacher affiliated with the Laban/Bartenieff Institute of Movement Studies (LIMS) who is a certified movement analyst (CMA), the credential provided by LIMS, to provide analysis of the method presented in this section, creating fodder for the development of lay user studies, which will also be presented. This descriptive analysis by a CMA will help sharpen a method for choreographing robotic motion.
Several prior efforts have leveraged LMA, in particular the notion of movement quality defined in the system, Effort [
10,
11,
12,
13,
14]. For example, previous research has used an LMA-trained performer to create flying robot trajectories using Effort [
15] and in [
12] real arm movements performed by a CMA were studied. A thorough comparison to [
15], which is closest to the work presented here, is provided in
Section 5.1. In [
11] relaxed terminal conditions were used in the method. This will not work in our context, where a team of robots needs to meet functional tasks in a spatial environment—determined by a human user. The work in [
13] maps Laban’s four Effort parameters to low degree of freedom robots for emotive expression. Others have focused on the development of expressive tools for choreography on quadrotors [
16]. This work relates to a growing community of work to create expressive robotic systems [
17,
18,
19,
20,
21]. Further, many of these works assign an emotive characterization on their variable motion. Our position is that emotive models will be limited in application and soon be outmoded. Like the use of language, which evolves as new slang creeps in, and art, which reflects the period and place in which it was created, movement is something inherently expressive with subjective, contextual interpretation [
22,
23].
Here we note the many differences between the articulated human mover and the simple UAVs we are working with, which do not have any articulation. We work directly with a CMA in direct observation of a parametric method for generating variable motion, correlated with Effort parameters. The resulting method is then evaluated in context by lay (non-expert) individuals. Thus, our task is to (a) create high-level motion parameters to control mobile robot motion behaviors, (b) translate these parameters to a trajectory that satisfies given task constraints, (c) evaluate robotic motions generated with a CMA, and (d) guide evaluation by 18 lay viewers with context based on CMA motion observation and our application area. In this work we will leverage the theory of Affinities between Effort and Space (another component of LMA) in creating expressive robots. Laban observed and described the relationship of dynamic movement (Effort) to the space in which the movement occurred (Space) [
24,
25,
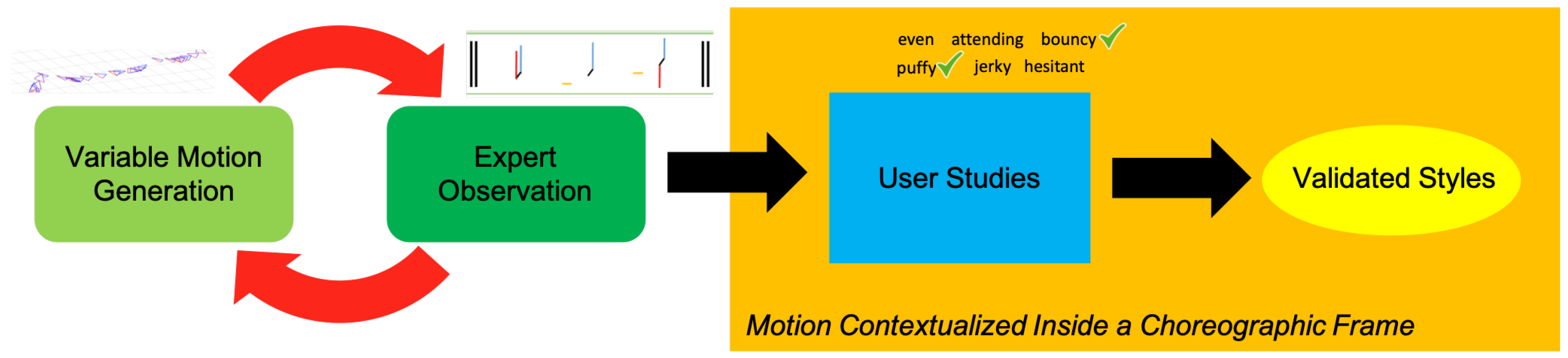
26]. This will allow us to create a perceived experience of the motion of the UAV in appropriate relationship to its task. Then, we will ask an expert movement analyst to evaluate the use of the LMA terminology. Finally, user studies will further evaluate our method. An overview of the work is presented in
Figure 2.
The rest of the paper is structured as follows:
Section 2 reviews Effort and goes over the steps of our method for creating and running robotic motions in simulation for a flying robot. In
Section 3, we conduct evaluations of the robotic motions generated by having a CMA watch the flying robot motion simulation videos and provide analysis that is leveraged in lay user studies. In
Section 4, we present the result of these user studies. In
Section 5, we discuss future applications of this method. In the future, we are particularly interested in crafting increased levels of perceived safety in user populations such as the elderly, who may be assisted by a team of mobile robots to provide prolonged, increased independence.
3. Methods: Expert Evaluation and Development of Motion Description
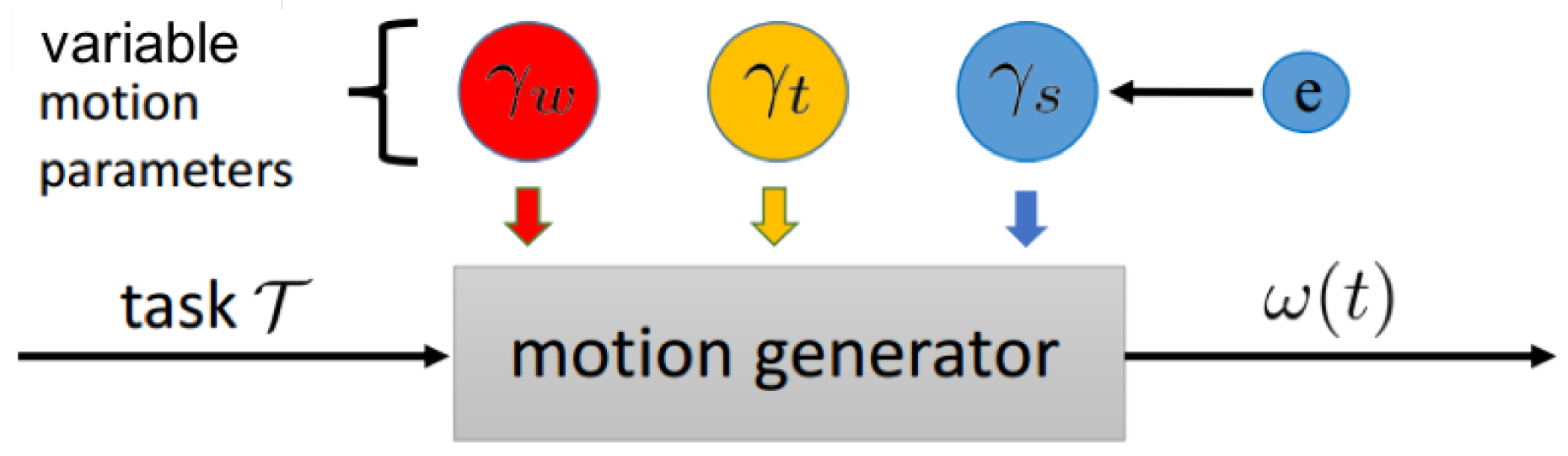
In order to evaluate our method and develop descriptions to be validated by lay viewers, we simulated 10 distinct motion styles. The 10 configurations used and the corresponding motion parameter values of
,
, and
are shown in
Table 1. Then, we used the Effort component of LMA (This observation was provided by the second co-author who received their CMA in 1984 and has been working actively in the field since, while the method in the previous section was developed under the guidance of the third author who is also a CMA, certified in 2016.) to observe these 10 videos, performing a comprehensive motion analysis, including writing down the general movement patterns in the LMA framework and providing descriptive words for each movement observed (the second to the left, dark green block in
Figure 2). From these words, descriptive contexts for the home environment were established that are utilized in lay viewer user studies in the next section.
The purpose of this structure is to leverage the expertise of a dancer and choreographer in creating a choreographic frame for the varied motions generated. What we have found in prior work is that context modifies the meaning of motion, breaking down the use of emotive or affective labels [
27]; this is commonly known in the dance community, e.g., discussed through the lens of culture here [
28], and may be thought of as creating a choreographic frame such that the intent of an artistic piece is clear. Thus, here, descriptive (rather than emotive) labels, which may seem initially odd placed next to movement, e.g., labels like “clear” and “puffy”, are used. These are words used in LMA to create connection between movement variation and situated human experience; for example, “puffy” describes the kind of light, indirect movement that is evoked from running a hand across a fluffy, puffy wad of cotton candy or tulle. The role of this expert observation was to use an eye that has both a wealth of experience in creating meaning through motion in choreographic practice. Thus, this CMA expert provided a channel between objective variation in movement and subjective human experience. Moreover, this co-author was not familiar with the details of the motion generation, providing a more objective eye on the movement; just as has been shown in prior work, familiarity with motion structure changes how it is seen [
29].
In
Table 1, we list a subset of possible Effort configurations that were used for the validation of the method. Each configuration was used to generate motion trajectories subject to the same task
. For the motion generated in Video 01 we keep all the values of motion parameters to be 0. In other words, we do not apply any Weight and Time Effort and set Space Effort as “most” Direct. From there, each motion example is generated from a representative sampling of possible configurations. The CMA evaluator was given two views of the robot motion without any knowledge of the method producing them. A multi-frame capture of these videos is shown in
Figure 9.
3.1. Results
The results of the CMA’s observations are shown in
Figure 10 and
Table 2. In
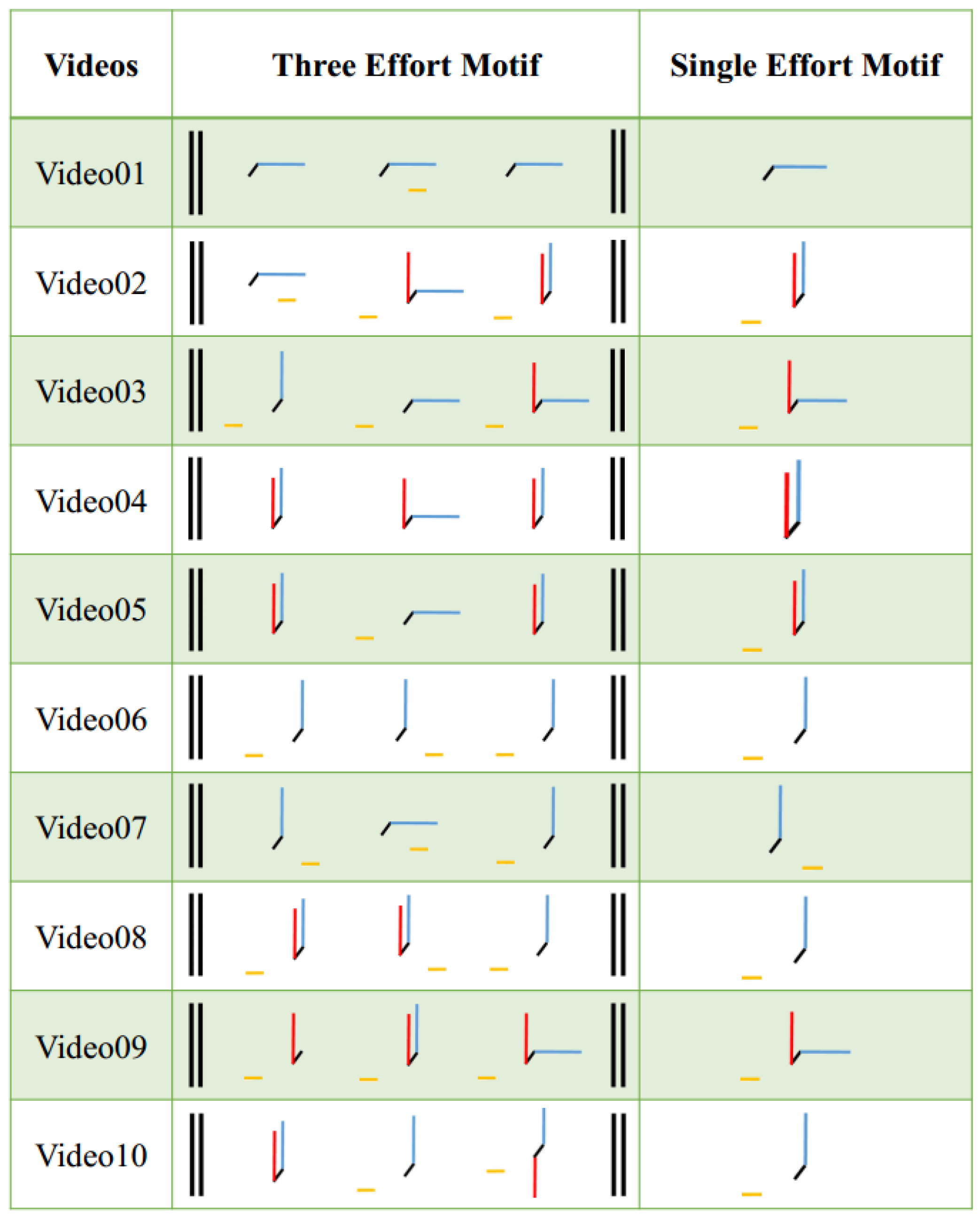
Figure 10 the observed motion patterns are described by Motifs, an LBMS tool used to represent the essential components of movement patterns and sequences. These Motifs consisted of three separate Effort configurations, which means the CMA perceived more dynamism in the profiles than we expected. The single Effort configuration was selected after we requested the CMA to choose just one. Given that each motion profile was generated with just one set of three parameters, this was a better fit to the generation method; however, in future work, we would like to explore this perceived variation over time.
Given the analysis in this format, we can say that each three-Effort Motif (the middle column in
Figure 10) shows the perceived progression in time. For example, for Video 04, the first Effort combination was Light and Direct, the second Effort combination was Light and Indirect, and the third Effort combination was Light and Direct again. The whole movement pattern, when restricted, can be described in a single Effort Motif in rightmost column of
Figure 4 as Light and Direct.
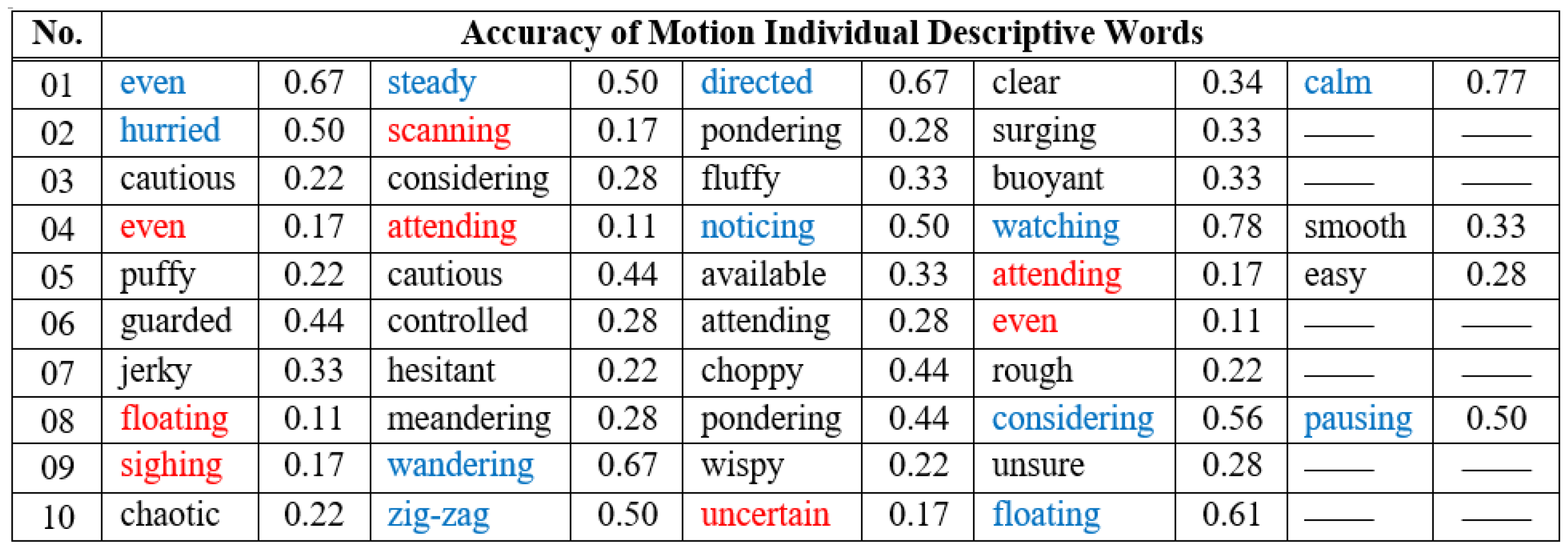
Because lay users will not be familiar with the meaning of these Motifs, we also established a set of descriptive words and our corresponding contexts for each flying robot motion simulation which are given in
Table 2. These contexts were selected to be in a “home” environment due to the nature of our sponsored research; by giving some context, we created a more meaningful (if imagined) scenario within which users can evaluate motion.
Thus, in
Table 2, every flying robot motion simulation is described by a set of words. For example, for the motion simulation in Video 04, it is described by “attending, even, noticing, watching, smooth” which was related to the values of the motion parameters, where
,
, and
. In other words, according to our analysis, the above motion parameter settings can be used to generate a motion that is reasonably described by the corresponding descriptive words. In a home context, we may expect to find such movements in a watchful mother attending to her child (hence the context provided in
Table 2).
From the movement analysis given by the CMA, we can summarize that our method can be used to generate motion that is expressive for even low degree of freedom robots. Another anticipated result of the flying robot motion analysis is that the motion simulation in Video 01 gives the observer an impression of neutral, plain movement as described by words “even, steady, direct, clear, and calm”. We first establish the parameter setting of
shown in
Table 1. Moreover, from a technical point of view, this direct, linear interpolation between way points is the minimum distance to traverse and thus corresponds to a traditional planning method. Thus, this “default” behavior is like traditional motion planners, which we used as a benchmarking comparison for our method, which creates deviations in this linear path to create different modes of motion. We labeled this setting “none” (or neutral) in Weight and Time Effort quality but “most” Direct in Space Effort in
Table 1 of Video 01 due to the direct path taken by these traditional techniques.
In Video 03, we set the Space Effort
which aims to generate a Direct motion for the UAV. The motion analysis results shown in
Table 2 also verify this, the descriptive words “Cautious” and “Considering” show the directness of the motion of the flying robot in the simulation. What’s more, the Effort Motifs in
Figure 10 of Video 3 also show Direct Space Effort as well as Sustained Time Effort feature, correlating with a small value for
.
3.2. Discussion
In observing the videos, the CMA noticed a correlation of her perception of Weight Effort to a change in the Vertical Dimension. This observation is consistent with the theory of Affinities of Effort and Space in which Laban observed that Light Weight Effort tends to be expressed in the space of up, while Strong Weight Effort tends to be expressed in the space of down. The CMA observed the use of spatial affinities as a substitute for true Weight Effort which is probably generated in humans through a change in muscle tonus and dynamic. In particular, the quality of Light Weight Effort was very clear, but Strong Weight Effort was more diminished and observable only via a shift in spatial pathway.
For Space Effort, the CMA noted the use of simulated robot pose as an effective inroad to Direct and Indirect Space Effort. This is seen in human movers through the use of “open” or “closed” body pose with respect to the midline. The CMA felt this was the most successfully recreated factor with regard to finding both polarities: a meandering pathway indicated attention to the whole environment while a steady yaw heading produced a very clear spatial attention toward a single point. For Time Effort, the CMA observed that Sudden Time Effort was quite visible, giving the impression of hurried or even rushed movement patterns. Sustained Time Effort was visible more as a “hovering”, which is not precisely the same as in human movers, where luxurious indulgence in attitude toward time is seen more readily. Finally, the CMA agreed that Flow Effort was not present in any of the videos.
This poses several important questions for future iterations of such work. How can the practice of changing muscle tonus, as found in Weight Effort in human movers—an important perceptual cue to movement’s intent—be approximated or simulated in robotic agents? This will inherently require additional degrees of freedom on a platform, but could be created through some artificial convention (as lights in a stoplight have conventionally accepted meanings). This capability is important for the recreation of Strong Weight Effort. Secondly, how does a machine appear to indulge in time—creating Sustained Time Effort? Movement efficiency is something that has come to be expected from machines, however, in human-facing, care-taking scenarios, such efficiency could become exhausting to a human viewer (at least, this is the case in choreography). A balance that finds hold in prior associations and creates new, more relaxed interaction paradigms may be needed in these scenarios.
Finally, the neglected Flow Motion Factor is one that has proven difficult to capture in robotic systems. According to the LMA taxonomy, this is also one that could help bring a more “life-like” sense to robotic motion. For low-degree of freedom robots, this may not be possible to achieve without extra expression modalities such as light and sound. Thus, this section provides an initial validation of our method and directions for improvement in the future. Furthermore, we have constructed accessible descriptive words and contexts, which will be used in the next section to offer untrained viewers descriptive options with which to evaluate these movements. Again, we emphasize that these motions cannot convey an absolute emotional state like ‘happy’ or ‘sad’ but may be associated with certain, we could say textures, which may be appropriate in the listed in-home contexts.
4. Results: Contextual Evaluation by Lay Viewers
Based on the results from the CMA, we created 20 questions to conduct a further study for general untrained users on motion simulation videos generated by our algorithms (this the blue square in
Figure 2). We recruited 18 participants from our university (eight male and 10 female, aged 18–30 years). These participants were reimbursed with a
$15 gift card for their time. The surveys took about one hour. The participants watched the same videos as the CMA did and answered two questions for each video.
The first question asked each participant to choose the descriptive word or words (from a group of nine with space to write in a tenth) that best matched the corresponding aerial robot motions in the video. The second question was to choose a single context out of three options which best described the overall motion. The ‘correct’ answers were those given by the CMA and the ‘incorrect’ options were randomly sampled from the whole bank of descriptive words and contexts, respectively.
Two issues with the experiment should be mentioned here. Firstly, the researchers failed to provide all the “correct” answers for the first question on Video 01. To address this, the first eight participants were required to do this question again. Secondly, the pool of participants ended up being entirely native Chinese speakers. While this was not intended, it may have influenced the results positively by removing the variable of cultural differences of interpretation. However, researchers found that participants needed to check the meaning of the descriptive words in the dictionary when they were taking the surveys.
4.1. Results
The results from the untrained participants are given in
Figure 11 and
Figure 12.
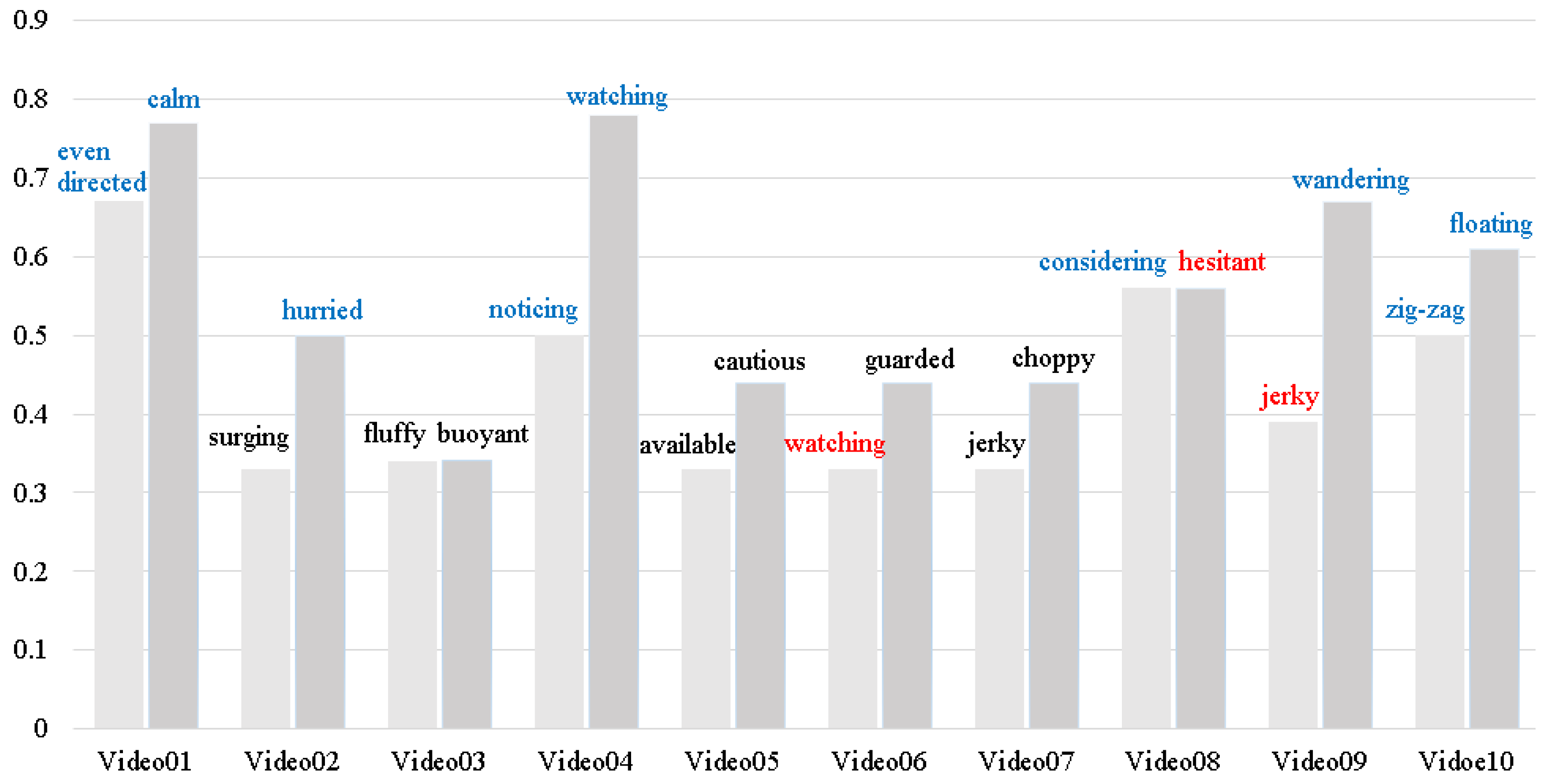
Figure 11 gives the accuracy of the individual descriptive word for each flying robot motion simulation. The accuracy of individual descriptive word for each question was defined as the percentage of participants that identified it correctly when viewing the video associated with it.
Figure 12 gives the overall accuracy for both the descriptive words and the contexts. The overall accuracy of descriptive words for each question was defined as the average of individual word accuracy for all ‘correct’ words for the given video. Participants were not especially good at identifying the correct descriptive words, although several videos had consistency in the top words chosen (see
Figure 13). Participants were
accurate or more on eight of the 10 videos with respect to their expected context. These results confirm the scaling suggested in
Section 2 and suggest thresholds for the quantitative parameters used to generated the motion profiles. These are summarized in
Table 3, which shows the suggested threshold for each motion parameter, namely
,
, and
.
4.2. Discussion
In general, participants only picked two to three choices in descriptive word questions and offered no word of their own in the free response field. We believe there was a significant language barrier for participants in this part of the task. Further, it is unusual for untrained viewers to describe motions with words like “choppy” and participants commented on that after the exercise. From
Figure 12, we can see all the overall accuracy for each video is
, which means our results are within the range of users selecting randomly (for two to three words out of nine, random choice is 22–33% accurate). However, in several cases, there was a dominating descriptive word, such as “watching” in Video 04, “wandering” in Video 09, and “floating” in Video 10, meaning some words were well-suited descriptors to untrained participants. On the other hand, incorrect answers such as “watching” in Video 06, “hesitant" in Video 08, and “jerky" in Video 09 were also found.
For motion context questions, the results show that for all context except one users were more likely to select the expected, pre-labeled context than others. As shown in
Figure 12, our results are better than random choice, which is around
(only one video was labeled with its context with lower frequency). This indicates that the overall motion of the aerial robot can still give participants a strong, consistent sense of its intended motion quality. Further, even though users did not resonate with the descriptive words, they proved useful in generating the contexts that were meaningful for users. This produces artificial motion on a simulated aerial robot that is validated with meaningful description and context, shown in the yellow oval in
Figure 2.
5. Conclusions: Toward Expressive Aerial Robots
We have presented a novel method for generating expressive, variable robotic motion. We have compared our method to prior methods that use LMA as a guidepost for creating similarly expressive motions. In particular, we have contrasted our restraint in giving emotive labeling and our inclusion of context explicitly in evaluation of our method. From work with a CMA observer, we have shown that our algorithm can be effectively used for generating distinct variety of movement. From the results of the user study, when framed with context, we successfully showed that even for general, untrained users, the motions performed by a simulated aerial robot via our method give participants different impressions.
5.1. Comparison to Prior Work with Expressive Aerial Robots
Here, we provide an extended comparison of the work presented here to prior work [
15] that has also implemented a model of Laban’s Effort framework on aerial robots. In this work, an artist was hired to “author” motion on a robotic platform. This produced eight captured movements that were implemented on hardware and evaluated using the Circumplex Model of Affect [
30]. In our work, we have generated a task-sensitive parameterization of Effort that can be used to generate more than eight motions; while 10 are presented here, more can be created through the framework with different values of
,
, and
or through different “tasks”
. Moreover, we have pioneered a descriptive validation based on describing movement quality (rather than evaluating its perceived affect) through descriptive words and situating generated motion inside choreographic context through established motion contexts. Finally, it should be noticed that in this process, we leverage and explicate the intellectual contribution of an artist and this is recognized through co-authorship.
5.2. Future Direction
The advantage of this method is that we can extend the motion analysis provided here to further query population specific groups not familiar with the LMA taxonomy, such as members of a particular generation, like the baby boomers, whose shared generational context may produce a population-specific interpretation of motion. Future work will run more evaluations with groups of users both in virtual reality and on real robot platforms in order to explore the communication channel between humans and aerial robots.
For our desired application of in-home robotic assistants, there are many related fields of work that need to be completed. It is envisioned that, as in the fairytale Cinderella, where woodland creatures work together to aid this character in her daily chores, that teams of relatively simple robots may be able to assist elderly people. As it is, our work is in simulation and not implementable on hardware. Moreover, we need some subsystem for manipulation to aid in many common tasks of daily living. The larger vision of this project is described in [
31].
Motion expressiveness, as created by the ability to vary motion profiles within some task-constraints, will play an increasingly important role in robot applications. These variable motion behaviors should reflect the robot’s task states and modulate according to context. As more research is done in this area and corroborated methods emerge, artificial agents may communicate with human counterparts not just with language-based channels but also with nonverbal channels. These behaviors will be context and population specific and can be choreographed by experts and artists through established taxonomies.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}