1. Introduction
Ground based robots typically move from place to place using wheels, legs, or by changing shape in a biomimetic fashion, as with peristaltic or slithering locomotion [
1,
2,
3]. Wheeled robots are the most common of these three locomotion styles because, in general, wheeled robots are highly efficient and they can move faster than other types of ground based robots [
1]. A special class of wheeled robots is the rolling robot, which rolls exclusively on an outer, driven surface that entirely envelopes the system [
4]. The study herein investigates locomotion of an autonomous rolling robot, developed at the Unmanned Systems Laboratory at Oklahoma State University (OSU) and pictured in
Figure 1, which generates torque by means of changing its outer surface. By executing shape change at just the right time, the robot repeatedly configures itself into a forward-tilting elliptical cylinder and subsequently rolls forward under the force of its own weight. In addition to being shape changing and partially gravity powered, locomotion of the OSU Roller, as it is entitled, is categorized as dynamic [
5], meaning it has a natural rocking tendency and exhibits inertial motion. In other words, if the outer surface were to suddenly stop changing shape in the middle of a roll, the robot would likely require several seconds to come to rest. Non-dynamic rollers, such as crawling rolling robots [
6,
7], move slowly in comparison and do not exhibit dramatic inertial effects after motion input has ceased. The OSU Roller is also an underactuated system [
8], referring to how the robot exploits its own natural dynamics in order to achieve steady, rolling locomotion.
Locomotion via gravity power has previously been studied as a field of interest in biomechanics. In [
9], researchers presented a mathematical model of human gait using a notional three-link machine with muscles that acted only to periodically configure the gait, leaving the machine to move entirely under the force of gravity for most of its motion. Others [
10,
11] investigated gaits in which gravity alone generated motion of simple link-composed machines down a slanted ramp. Authors of these studies pointed to the simplicity and efficiency of gravity powered gaits and suggested that power and control could be added using small, strategically timed energy inputs that do not interrupt the natural motion of the machine. Although the OSU Roller is not a linked walking machine like those presented in [
10,
11], the concept of applying strategically timed inputs during a gravity-powered gait is, in essence, how the OSU Roller works.
With the rise in popularity of modular robotics, researchers have developed shape changing rollers whereby six or more servo motor modules [
2] are stacked end-to-end to form a dynamic rolling loop. In [
5], researchers presented a modular loop robot composed of ten CKBot modules. On each module of the robot, there was a touch sensor for knowing when a side of the loop was in contact with the ground, at which point the loop quickly morphed into a newly configured football-like shape, now with its long axis aligned closer to the vertical, and continued rolling forward until the next side of the loop touched down. In [
12], researchers constructed a modular rolling loop composed of six SuperBot modules that was programmed to deform its shape by contracting and relaxing its hexagonal shape, thereby shifting the robot center of gravity forward and causing the robot to roll. Using their hexagonal rolling loop, researchers performed an experiment that measured endurance by lapping the robot around an inside building corridor for a total distance of roughly one kilometer while voltage in the module batteries was monitored.
Modular loops, while they are highly configurable and allow roboticists to experiment with different locomotion strategies and gaits, are bulky and mechanically complicated systems [
13,
14]. In contrast to modular loops, researchers in [
15] presented a dynamic rolling robot whose outer surface was a thin, lightweight strip of plastic that morphed by means of a singular servo motor. The robot used all onboard sensing and power to achieve velocity control relative to a desired step profile. Results of the research showed that when the robot was given a set of advantageous initial conditions, it was able to accelerate from rest and maintain constant average velocity with significant accuracy. The robot used for the investigation herein, the OSU Roller, is a modified version of the robot presented in [
15].
Although shape change has been shown to be a viable locomotion format in the aforementioned research endeavors, the subtle aspects associated with locomotion of dynamic rolling loops have previously not been unearthed. One of these aspects is how driving torque is affected by variation of shape change input timing. Along these lines, a unique characteristic of the OSU Roller is that it has the capability to measure energy consumed by its singular actuator during a trial roll, and this capability is utilized in an experiment documented herein that determines the effect of shape change actuation timing on energy consumption of the robot. Results of this experiment provide insights that can be applied to control shape changing rolling robots, including modular loop robots, more efficiently.
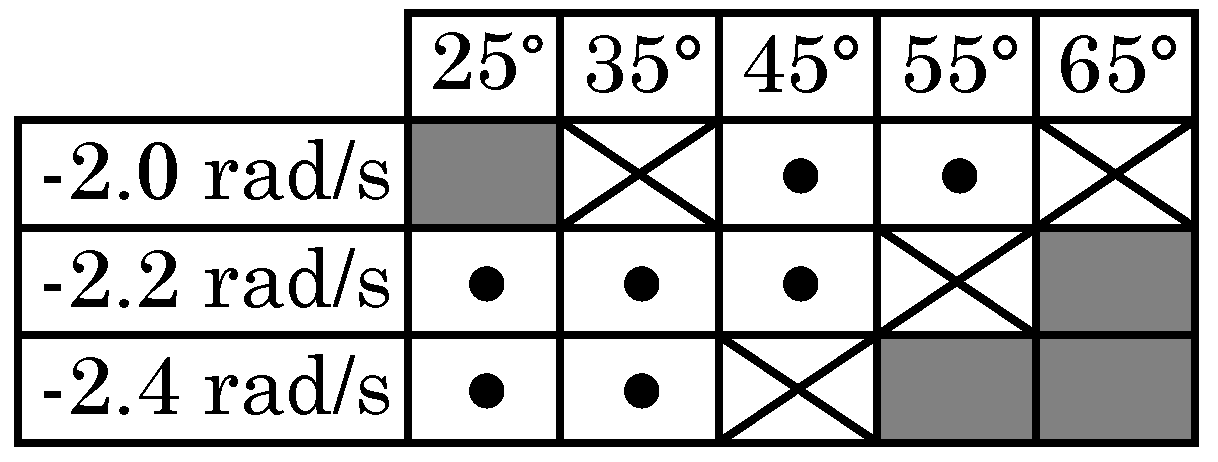
4. Discussion
The most interesting takeaway from the research documented herein is that, for each tested in the experiment, there exists a range of two or three values of that are determined to be superior in terms of energy economy of robot locomotion. When is decreased relative to this range, so that actuation is triggered with less tilt of the triggering axis with respect to the vertical, energy economy of robot locomotion is observed to decrease; and when is increased relative to this range, so that actuation is triggered with more tilt of the triggering axis, energy economy of robot locomotion is again observed to decrease. There is therefore an optimal range of with regard to energy economy for each tested in the experiment. Furthermore, results of the experiment reveal that as desired angular velocity of the robot is changed, the optimal range of changes as well. In general, this optimal range shifts downward (i.e., less tilt of the triggering axis) as velocity magnitude of the robot is increased from rad/s to rad/s.
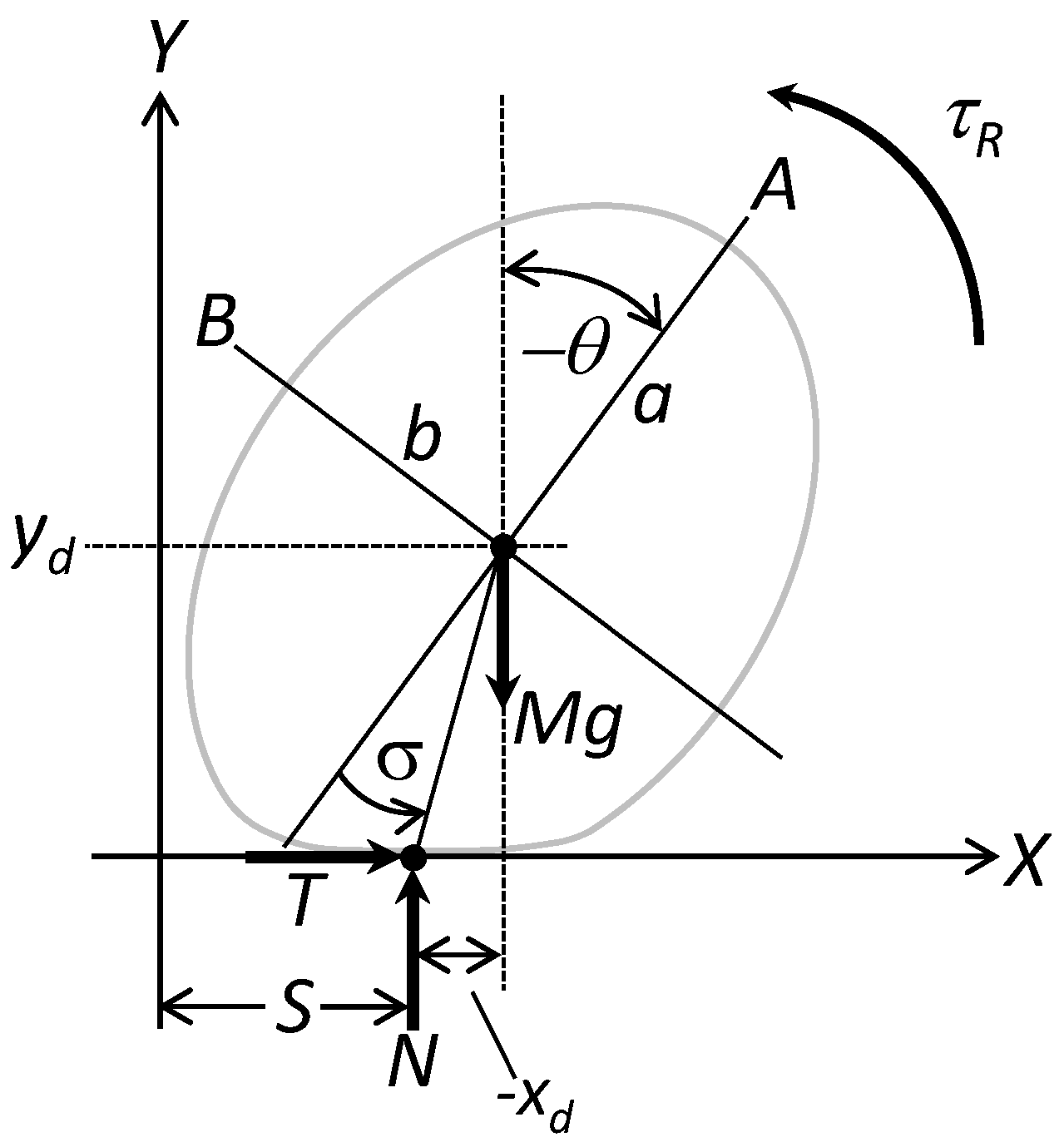
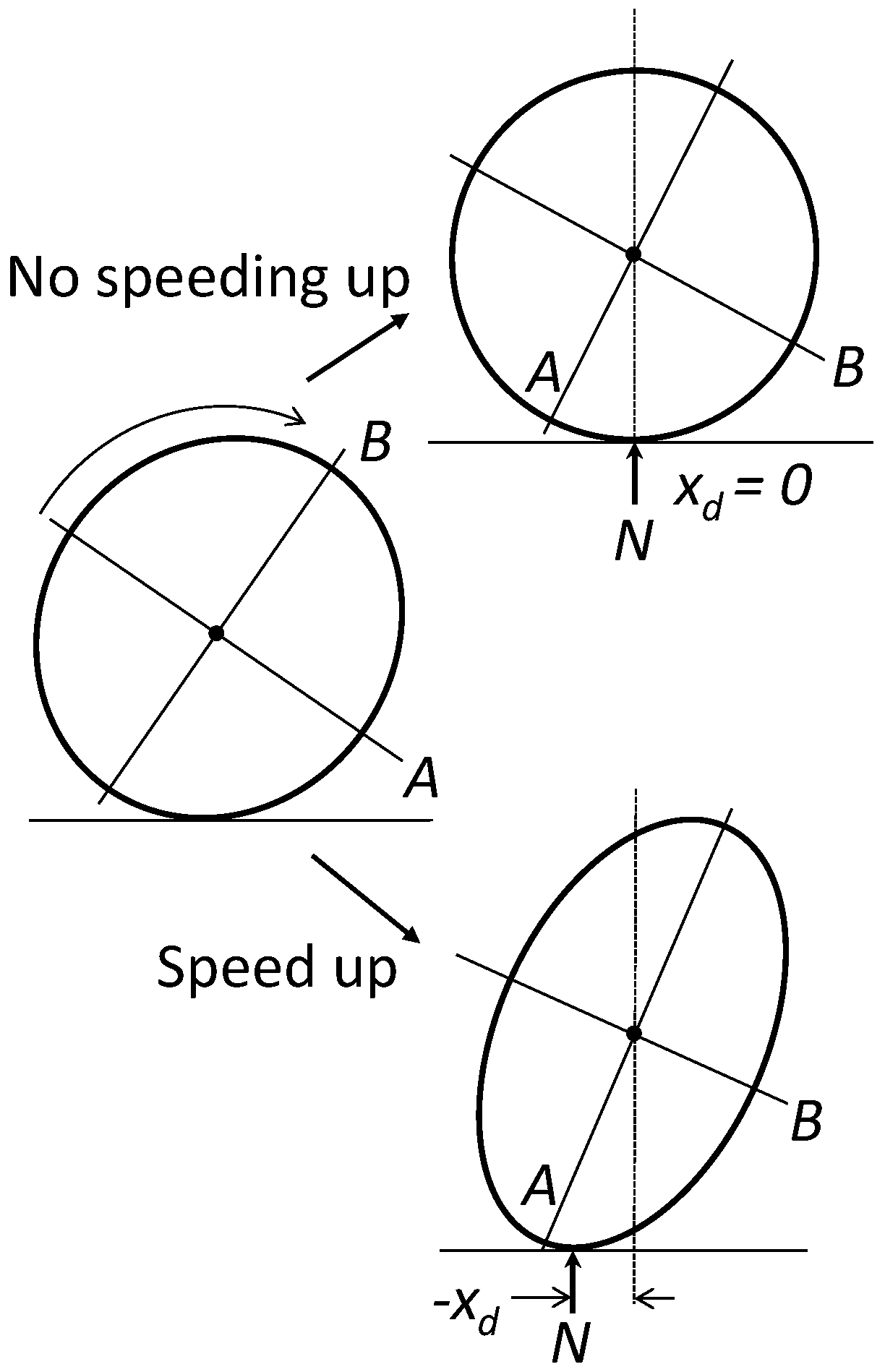
In order to understand the existence of this range of and why it shifts with robot speed, recall that the robot control system works by repeatedly morphing outer surface shape in order to change location of the normal force relative to the robot center of mass. In this way, the control system ensures that the normal force is most often located to the left of the center of mass during stable locomotion of the robot, causing input torque to be applied in a clockwise sense to drive the robot along X in the positive direction and to follow, on average, a desired angular velocity. However, upon careful scrutiny of controlled motion of the robot, it is apparent that the control system, which actuates shape change at most four times per revolution of the robot, has mixed consequences—that is, the control system speeds up the robot, but it sometimes slows it down as well.
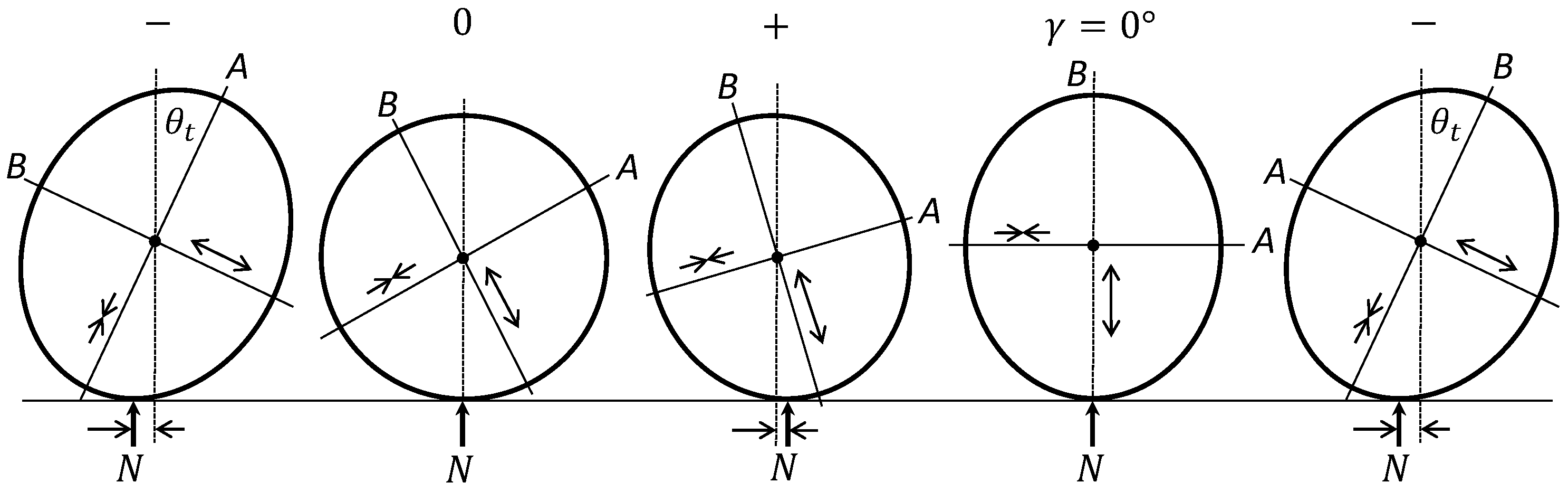
Imagine the roll scenario illustrated in
Figure 11 where roll instances are arranged chronologically from left to right. In this scenario,
is set below the optimal range for
rad/s, meaning that actuation occurs “early" in the
cycle when
. At the first instance in the scenario,
A has just swept past the trigger angle, and shape change actuation has begun. The moment arm,
, is negative because oblongness of the outer surface, combined with the slight tilt of the robot, place the touchpoint to the left of the robot center of mass. With a negative moment arm,
is clockwise in the first instance, and the robot speeds up as a result. Because shape change actuation occurs early in this scenario, the outer surface of the robot actuates to the circular configuration, as in the second instance in
Figure 11, before
A crosses the horizontal orientation. In the circular configuration,
is zero. At instance three, the robot has become oblong about
B, and
A still has not crossed the horizontal, so that
has become positive and
is now counterclockwise, and the robot briefly undergoes inadvertent braking. At instance four,
A has rotated into the horizontal, at which point
and
inevitably become zero again, and the scenario subsequently repeats with
A and
B in switched positions by the fifth instance.
A symbolic representation is introduced to characterize the input torque pattern on the robot in this early actuation scenario, wherein a plus sign is used to represent counterclockwise torque on the robot, and a negative sign is used to represent clockwise torque. The “0” digit is used to represent zero torque on the robot, and the expression, , is used to represent the instance when A or B is oriented horizontally, when gamma and are both zero. Starting at the first instance and using this symbolic representation, the pattern displayed by the early actuation scenario is: −, 0, +, , −, 0, +, , −, etc. A marked feature of this actuation pattern is the sequence: +, , −; that is to say, when , torque on the robot is changing from counterclockwise to clockwise.
For the purpose of learning if the robot exhibits the early actuation pattern during actual locomotion, four individual trial rolls from Problem 1, one for each viable value of
, are chosen and investigated. The values of
for the chosen rolls are consistent with average values of the corresponding
populations. The four trial rolls are referred as Roll A, Roll B, Roll C and Roll D, respectively corresponding to
= 35°, 45°, 55°, and 65°. Equation (
14) is used with reported roll data to compute
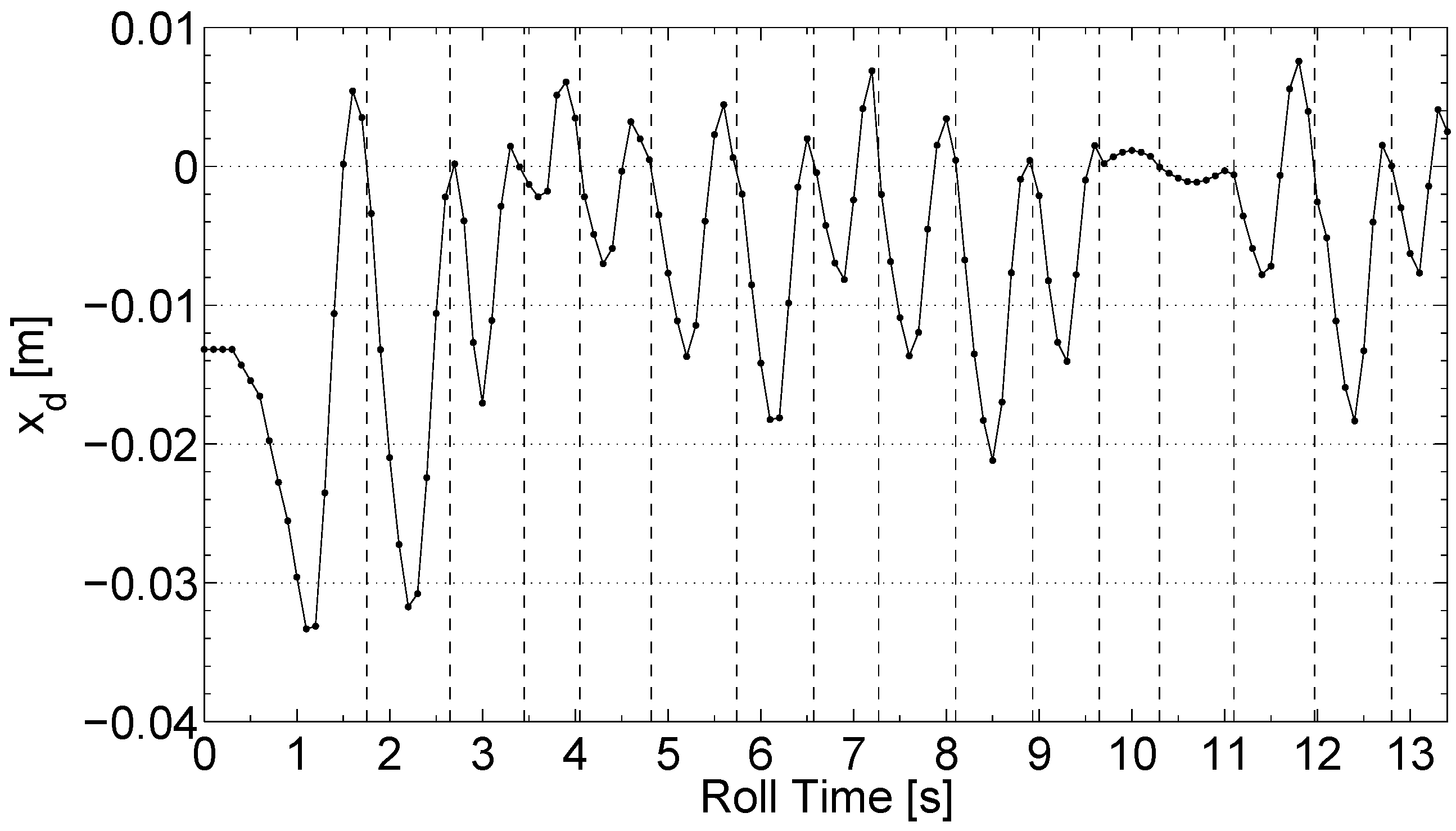
at every tenth of a second for each roll. In
Figure 12, computed values of
are plotted versus roll time for Roll A. Dashed, vertical lines in the graph represent approximate moments during the roll when
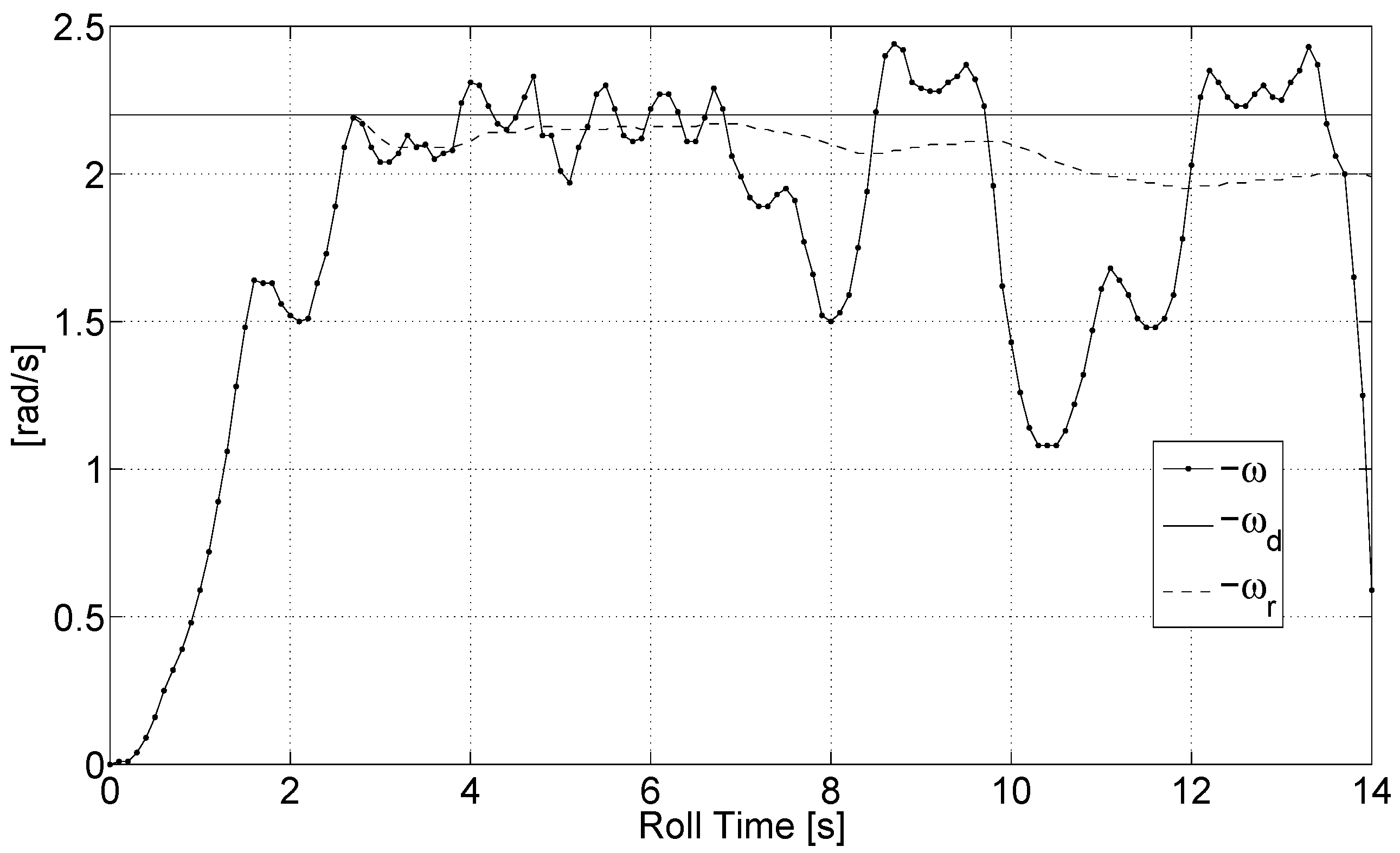
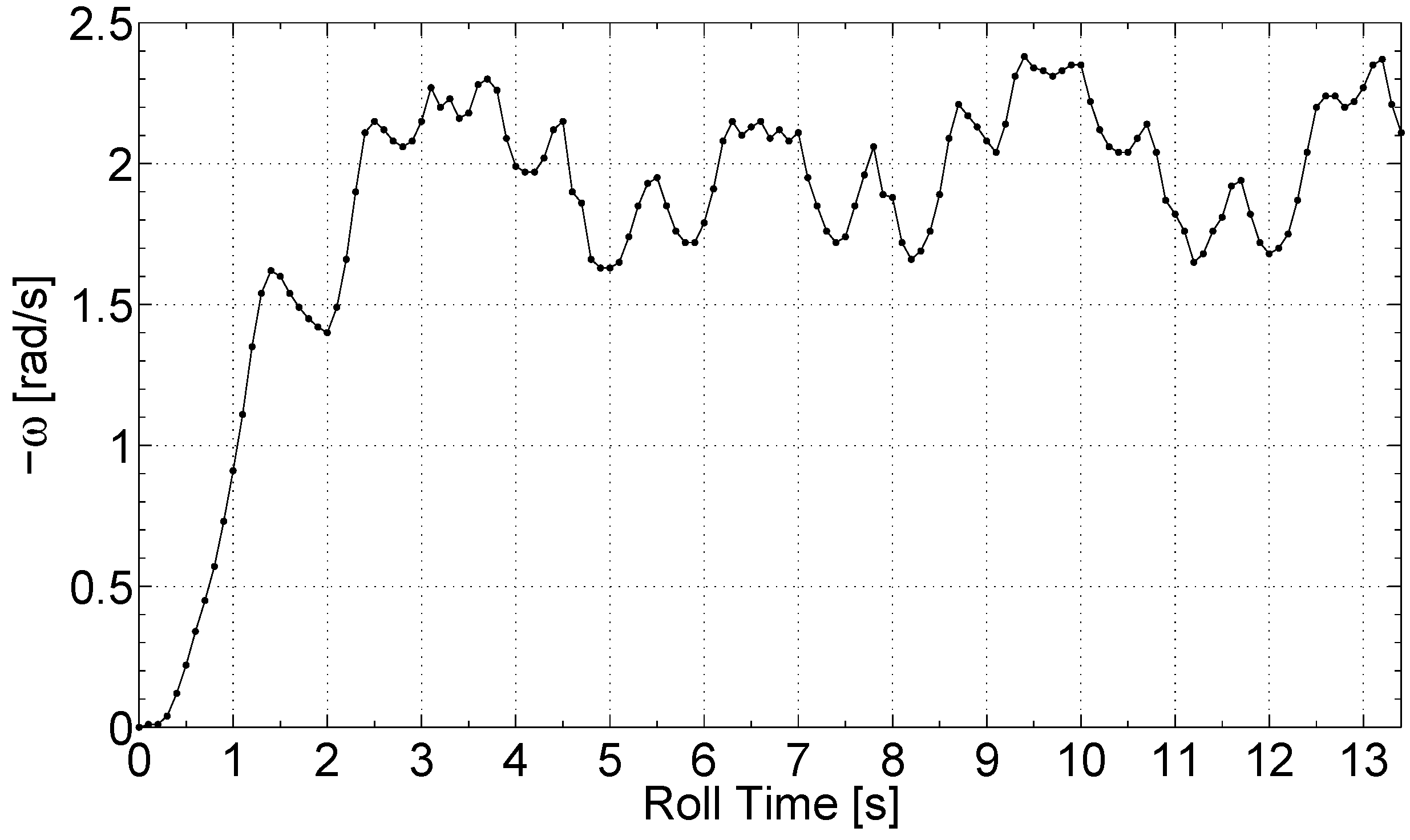
. A plot of angular velocity versus roll time for Roll A is also included in
Figure 13.
The plot of
in
Figure 12 reveals that
is frequently positive, which means the rolling robot experiences repeated inadvertent braking during steady state. These times are relatively short-lived, and the magnitude of
during inadvertent braking is generally smaller than when
is negative, and this result means driving torque supplies more energy to the robot than does inadvertent braking, which is expected, since the purpose and demonstrated outcome of the control system is to maintain forward motion of the robot. The actuation pattern for Roll A is clearly that of early actuation. The graph in
Figure 12 shows 13 times at which
, and at ten or more of these times, the
pattern is: +,
, −, which is that of early actuation. For Roll A,
is set to 35°, which is below the optimal range of
identified for
rad/s, so it is not surprising that the early actuation pattern would manifest here.
The early actuation pattern manifested during Roll A sheds light on why there is a lower limit on optimality of
in Problem 1. When
is set too low (actuation triggering is too early), the robot is prone to inadvertent braking, potentially at every
cycle. Notice from
Figure 12 that, when braking occurs, it is not always beneficial. That is to say, the robot often works against itself with considerable energy during the roll, slowing itself down when it is already going too slow. A good example occurs at roughly 5.5 s. At this time, the robot is already rotating too slowly (see
Figure 13) relative to the desired velocity magnitude when inadvertent braking comes on at 5.8 s and slows down the robot even more. Consequently, the linear actuator is subsequently forced by the control system to move at a large magnitude to create driving torque in order to speed up the robot and maintain the desired velocity. A similar thing happens between 11 and 12 s. With so much ill-timed braking, it is understandable why Roll A with
is not optimal in terms of energy economy.
Similar investigations into Rolls B, C and D reveal that there is nothing about the respective plots of
that points to why robot locomotion during Rolls B and C are relatively economical compared to Roll D, as is established by the results of the experiment (
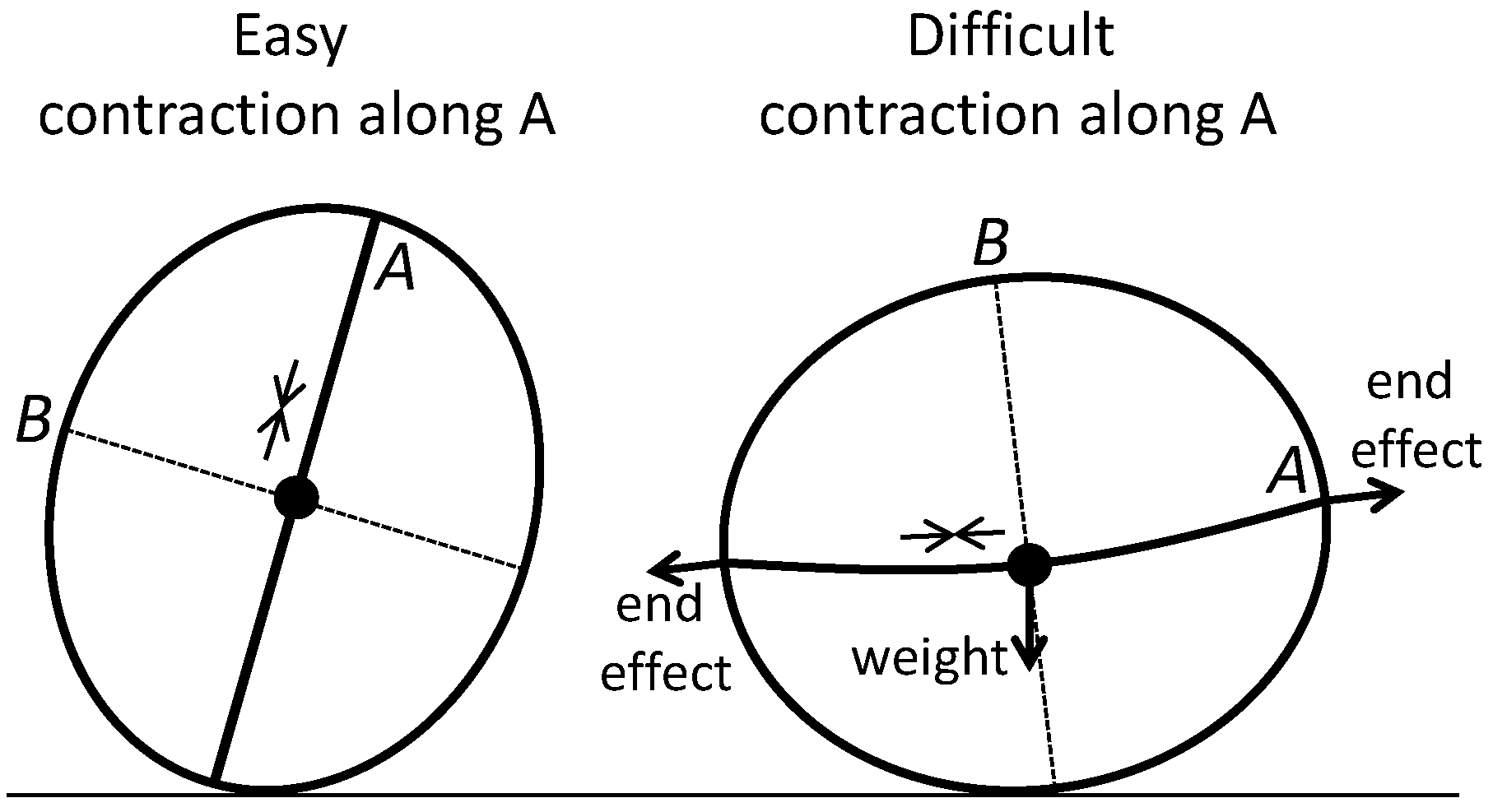
Figure 7). This absence of contrast leads one to believe there is a factor separate from actuation patterning that affects energy economy of rolls in Problem 1. In an effort to identify this factor, reported information from Roll D is scrutinized, and it is noticed that high energy consumption rates during Roll D correspond to periods of actuation when
A is the trigger axis. With this correspondence in mind, the average rate of energy consumption by the servo motor is calculated for actuation when
A is the trigger axis, and it is found to be higher, on average, than when
B is the trigger axis or during periods when the actuator is holding
a constant. The reason higher trigger angle values are associated with greater actuation burden is that deformation of the outer surface is greater during such actuation moves, resulting in outwardly directed end effects that pull on the actuator and resist contraction. In contrast, when orientation of
A during actuation is closer to the vertical, there is less bending of the telescoping columns and hence less friction; furthermore, gravity actually helps the actuator contract when it is orientated in an upright orientation. The effect of orientation of
A on actuation burden is illustrated in
Figure 14.
With these insights, energy economy results from Problem 1 can now be understood as stemming from a combination of inadvertent braking and actuation burden. To summarize, at one extreme when
is set low at 35°, angular velocity of the robot, which is
rad/s on average, is small enough in magnitude so the actuating outer surface often attains the circular configuration before
. In other words, the robot exhibits the early actuation pattern, as illustrated in
Figure 11, in which it frequently undergoes inadvertent braking and works against itself. For this reason, robot locomotion has relatively low energy economy for
. At the other extreme, when
is set high at 65°, actuation becomes increasingly burdensome due to the effects of gravity and bending of the outer surface, thereby nullifying gains in economy that might otherwise be had. In between 35° and 65°, there is an optimal range where
is high enough for the robot to largely avoid the averse early actuation pattern, yet low enough so that actuation burden does not greatly hinder the system. The same explanation given here for energy economy in Problem 1 applies to trial rolls in Problems 2 and 3, but with the difference that at higher rotation speeds, actuation burden is shifted downward on
relative to Problem 1, so that
= 55° and 45° are rendered least economical for Problems 2 and 3, respectively, while the lower trigger angles tested for each of these problems are most economical.
5. Conclusions
A rolling robot has been developed that generates torque by changing shape of its elliptical outer surface, which is flexible and can be morphed to retain oblongness about one of two notional, elliptical axes that are fixed to the robot and roll with it. The robot has been equipped with a sensing/control system by which it measures its angular position and angular velocity, computes error with respect to a desired step velocity profile, and changes the shape of its outer surface accordingly. Shape change actuation occurs four times per revolution, whenever an elliptical axis rotates past a predetermined trigger angle. The robot has demonstrated stability during roll tests, in the sense that it was able to quickly reach a constant desired angular velocity and remain close to it thereafter.
A series of trial rolls of the robot were performed using various trigger angles, while energy consumed by the servo motor was measured and used to calculate energy economy for each roll. Results of this experiment showed that, depending on the velocity of the robot, there exists a range of trigger angle values that are superior in terms of energy economy. This region of optimality on trigger angle generally shifts towards the vertical as desired angular velocity is increased. In search for an explanation, it was found that economical trial rolls featured a synchronicity of actuation timing and angular velocity, wherein the robot avoided agents of inefficiency that slowed the robot or burdened the servo motor. At higher magnitude angular velocities of the robot, actuations triggered at sufficiently small tilt angles preserved the synchronicity.
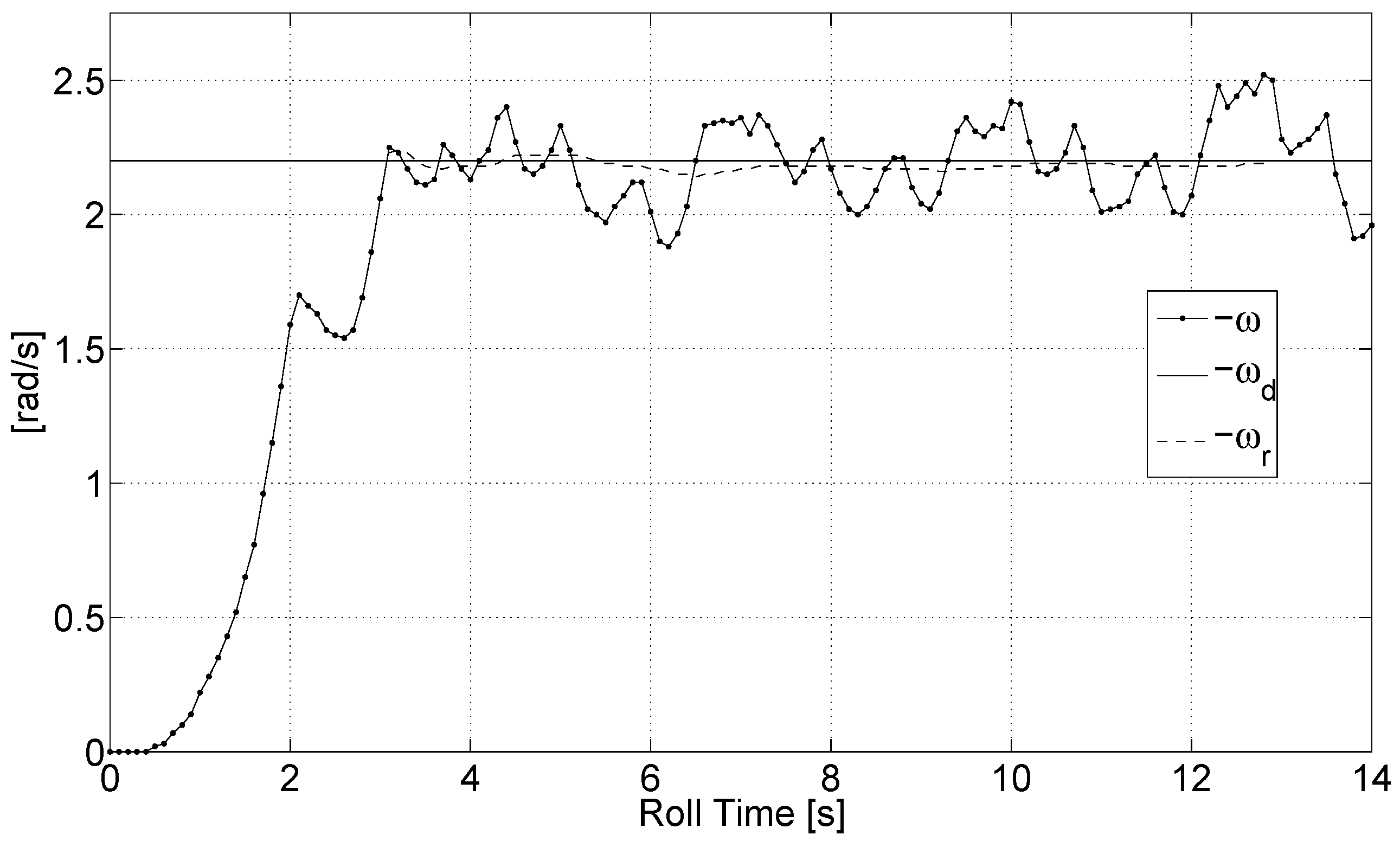
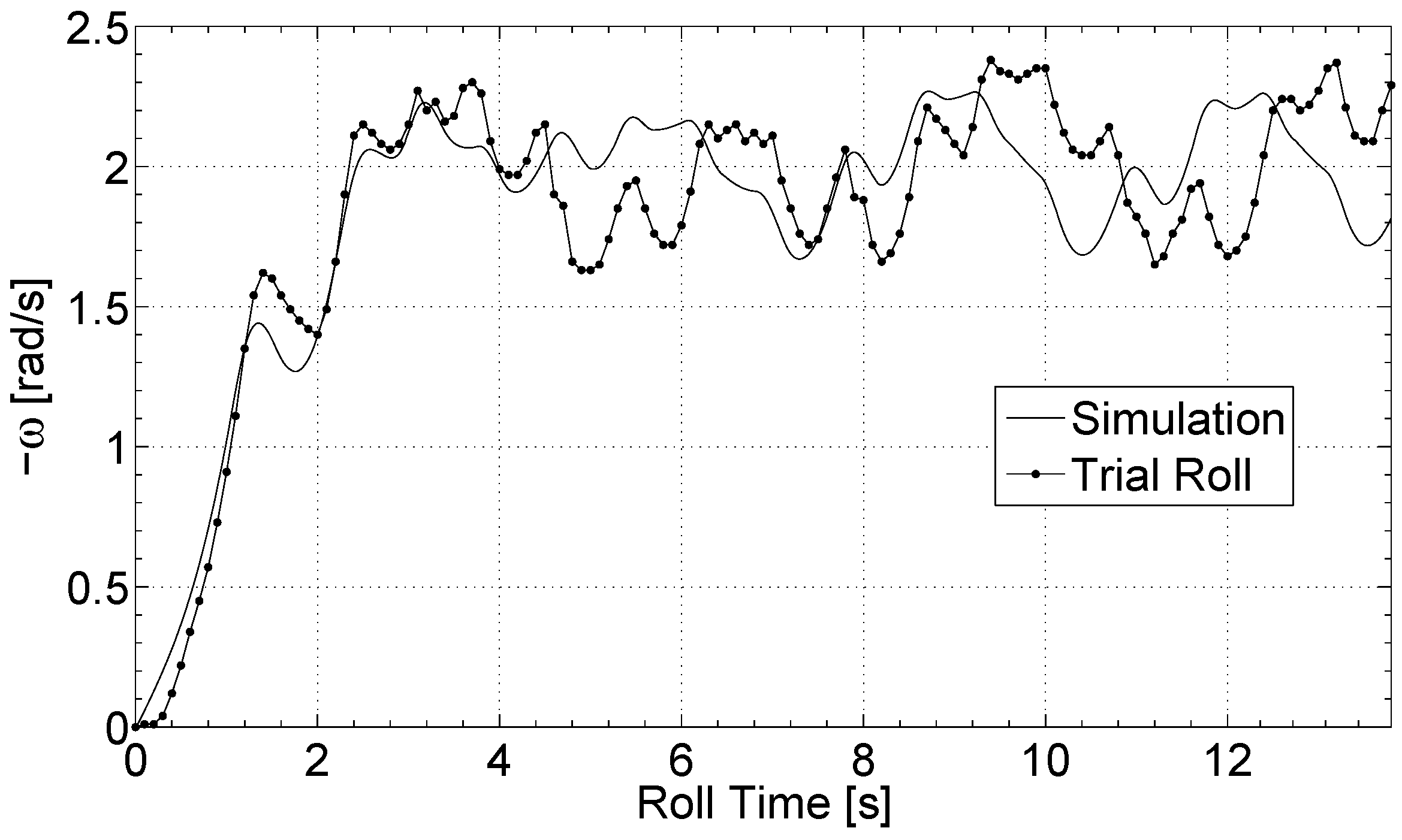
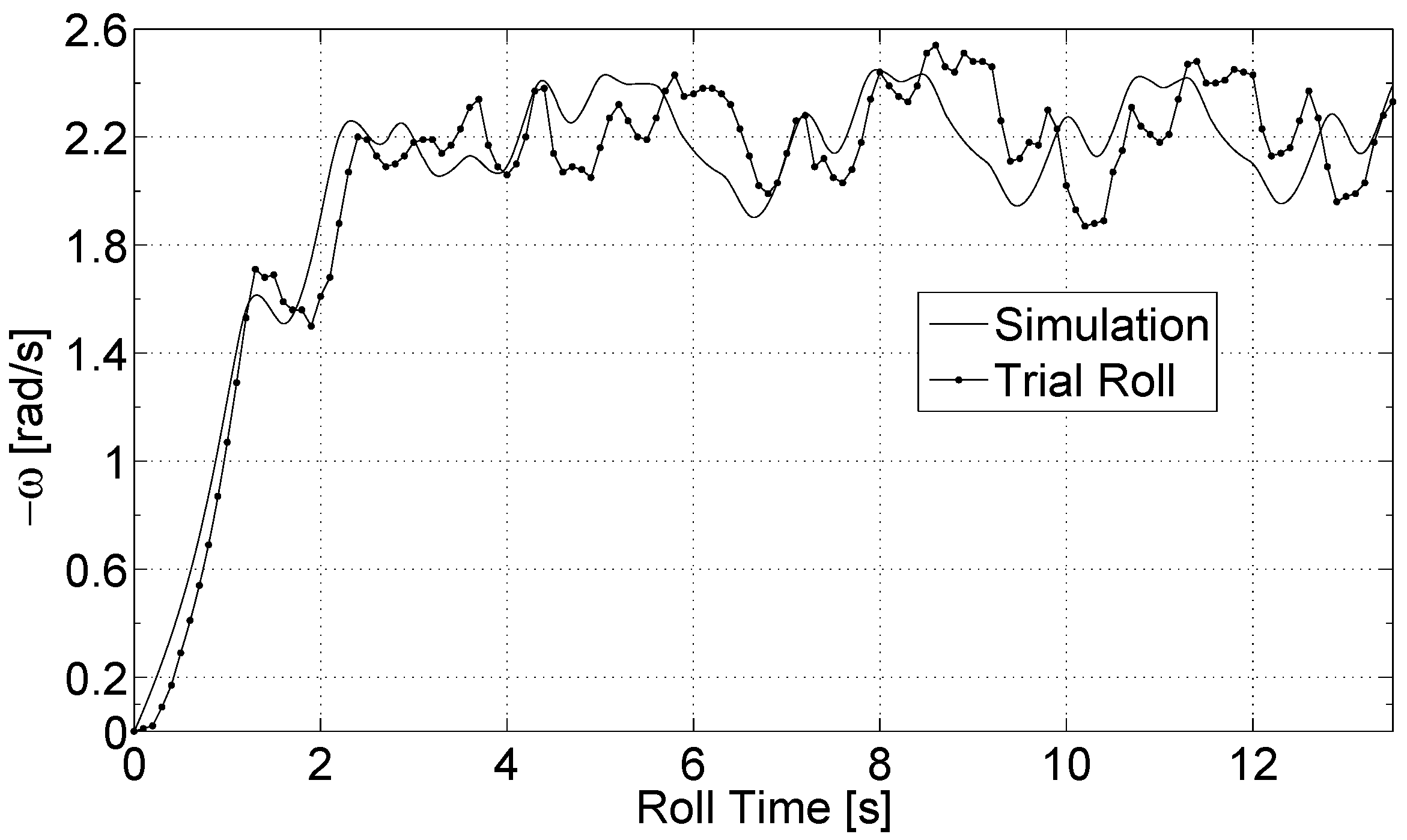
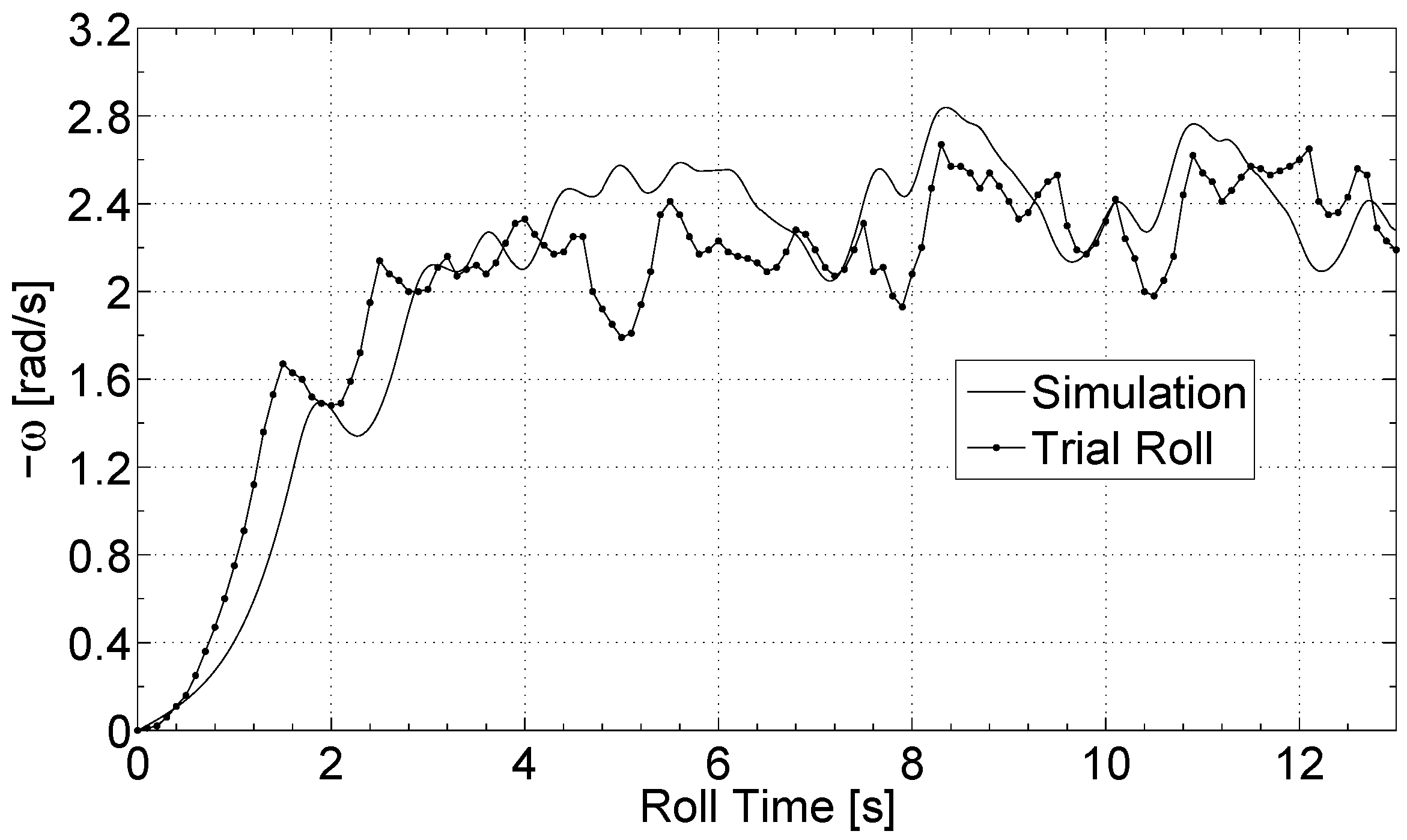
A mathematical model was developed for the robot that included bending of the outer surface and rolling resistance torque. Based on the model, a computer program was developed that simulated locomotion of the robot and was used to plot various motion parameters such as angular velocity and roll distance versus roll time. The program was configured to perform three simulation runs corresponding to actual trial rolls of the robot. Angular velocity from the simulations was compared to measured values from actual trial rolls, and the model was found to be significantly accurate.
In future research efforts, the authors would like to investigate the possibility of making an extraction of the OSU Roller with an outer surface that is bigger or smaller in circumference than the OSU Roller. Having developed a mathematical model of the robot, the effects on performance of such changes in size could easily be investigated in theory. In addition, perhaps future shape changing rolling robots could be constructed of adaptive materials such as Nitinol, pneumatic muscles, or a thermally tunable foam that acts as frame, wheel and actuator all-in-one. Imagining such extractions, which are presumably not too far off in the future, highlights how shape changing rollers have the potential to be simple, ultralightweight, efficient robots for use in various applications, including space exploration [
25].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













