

Methodology for Modeling Coupled Rigid Multibody Systems Using Unitary Quaternions: The Case of Planar RRR and Spatial PRRS Parallel Robots

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Preliminaries of the Algebra of Quaternions
aδ + bγ − cβ + dα ), ∀ (a,b,c,d), (α,β,γ,δ) ∈ ℜ4.
- (i)
- The operation ∗:ℜ4×ℜ4→ℜ4 is associative, sincep∗(q∗s) = (p∗q)∗s; ∀ p, q, s∈ℜ4.
- (ii)
- The element 1 = (1,0,0,0) ∈ ℜ4 is such that: 1∗p = p∗1 = p, ∀p∈ℜ4. This element is known as the neutral element of the multiplication in ℜ4.
- (iii)
- ∀p∈ℜ4, p ≠ (0,0,0,0); p′∈ℜ4 such that p∗p′ = 1. The element p′ is called the multiplicative inverse of the quaternion p.
- (iv)
- The operation ∗:ℜ4 × ℜ4→ℜ4 is not commutative. This is p∗q ≠ q∗p.
- (v)
- The following distributive properties are satisfied:
(b) p∗(q⊕s) = p∗q ⊕ p∗s, ∀p, q, s∈ℜ4
Qv = {(0,b,c,d): b,c,d∈ℜ}⊂Q
Tv(0,b,c,d) = (b,c,d) ∀(0,b,c,d)∈Qv
2.2. Parametric Representation of Rotations of a Rigid Body
2.3. Kinematic Modeling of Coupled Bodies
2.3.1. Isomorphism of the Vectors of ℜ3 to the Vector Space Q
2.3.2. Rotation of a Cartesian Frame of Reference
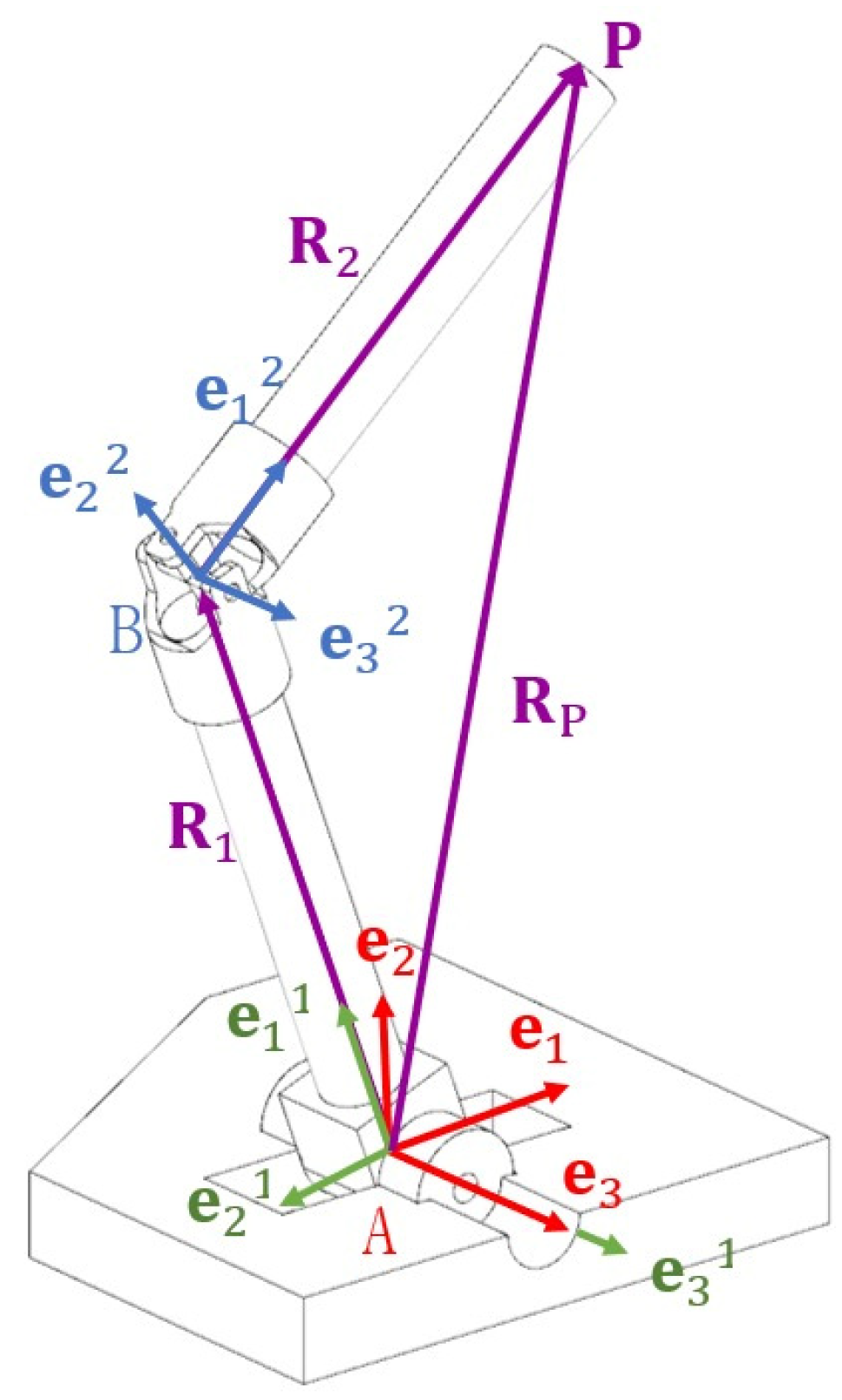
2.3.3. Configuration of Coupled Bodies
R1 = r1 e11
R2 = r2 e12
e12 = ρ(q, e1)
p2 = (p20, 0, 0, p23)
p3 = (p30, 0, p32, 0)
e12 = ρ(q, e1)
p3 = (p30, 0, 0, p33)
e12 = ρ(p3, e1)
2.4. Modeling of a RRR Planar Parallel Robot
- (1)
- Locate a coordinate system (x, y) and the fixed inertial base.
- (2)
- Select a kinematic chain (loop).
- (3)
- Associate vectors with each link of the selected kinematic chain.
- (4)
- Associate mobile bases for each rotation movement when going through the chain (Figure 4).
- (5)
- Construct the equation of position that locates the centroid of the platform with the origin (x, y).
- (6)
- Model the base rotations using expression (19).
- (7)
- Represent the position equation from step 5 in terms of quaternions.
- (8)
- Repeat the process for each of the remaining kinematic chains.
- (9)
- Formulate the inverse kinematic problem.
2.4.1. 3-RRR Robot Loop Equations
‖p3i‖2 = 1
‖p4i‖2 = 1
R2i = r2i e12i
R3i = r3i e13i
R4i = r4i e14i
RP = (0, xP, yP, 0)
e13i = ρ(q3i,e1); q3i = p2i∗p3i
e14i = ρ(q4i, e1); q4i = p2i∗p3i∗p4i
ej5i = ρ(q5i, ej); q5i = p2i∗p3i∗p4i∗p5i
ejP = ρ(qP, ej); qP = pP
e13i = ρ(p3i, e1)
e14i = ρ(p4i, e1)
e15i = ρ(s5i, e1); s5i = p4i∗p5i
p3i = (p30i, 0, 0, p33i)
p4i = (p40i, 0, 0, p43i)
p5i = (c(βi/2), 0, 0, s(βi/2))
pP = (c(θP/2), 0, 0, s(θP/2))
2.4.2. Platform Orientation Equation
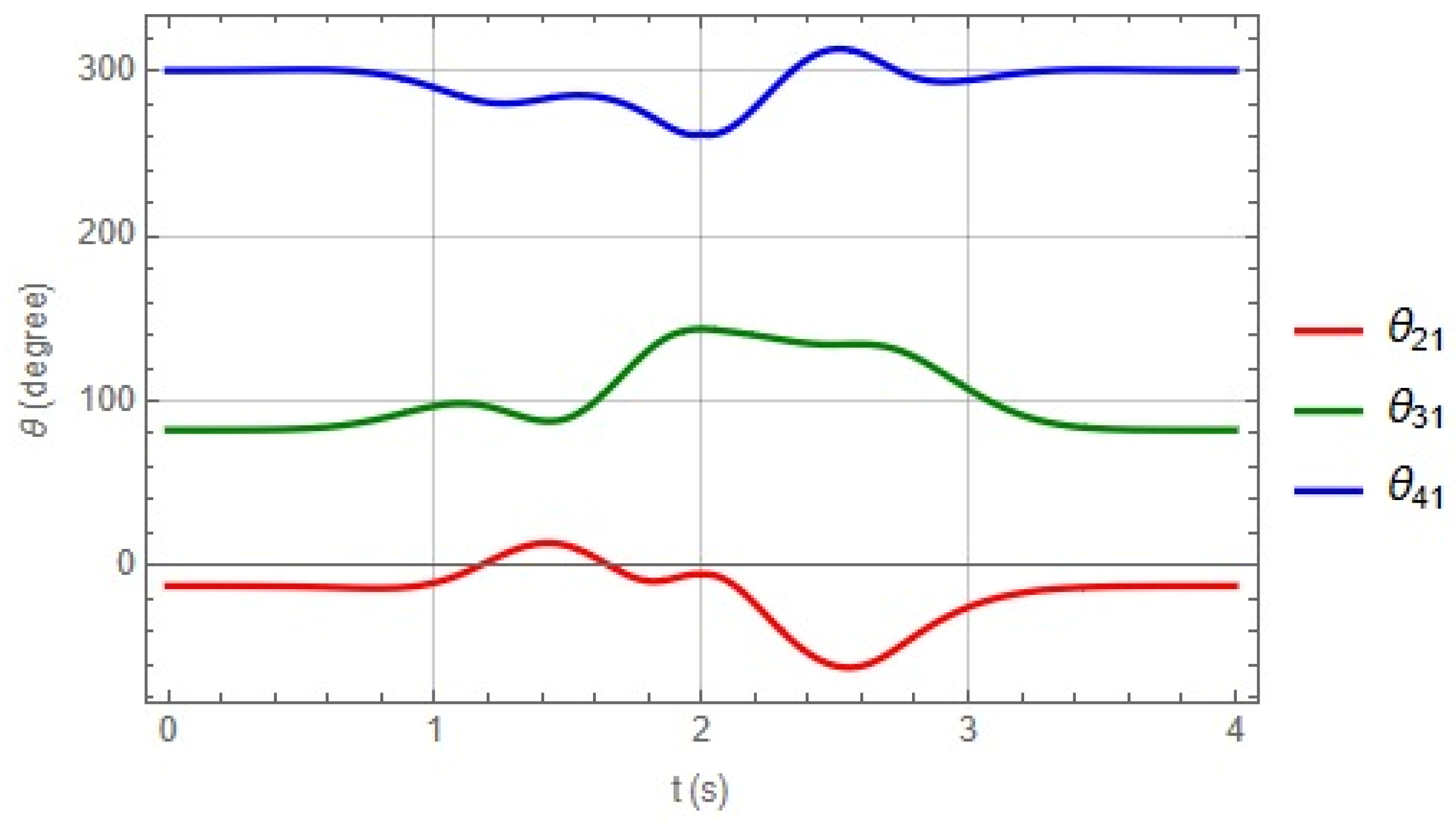
2.4.3. Formulation of the Inverse Kinematic Problem of the RRR Planar Parallel Robot
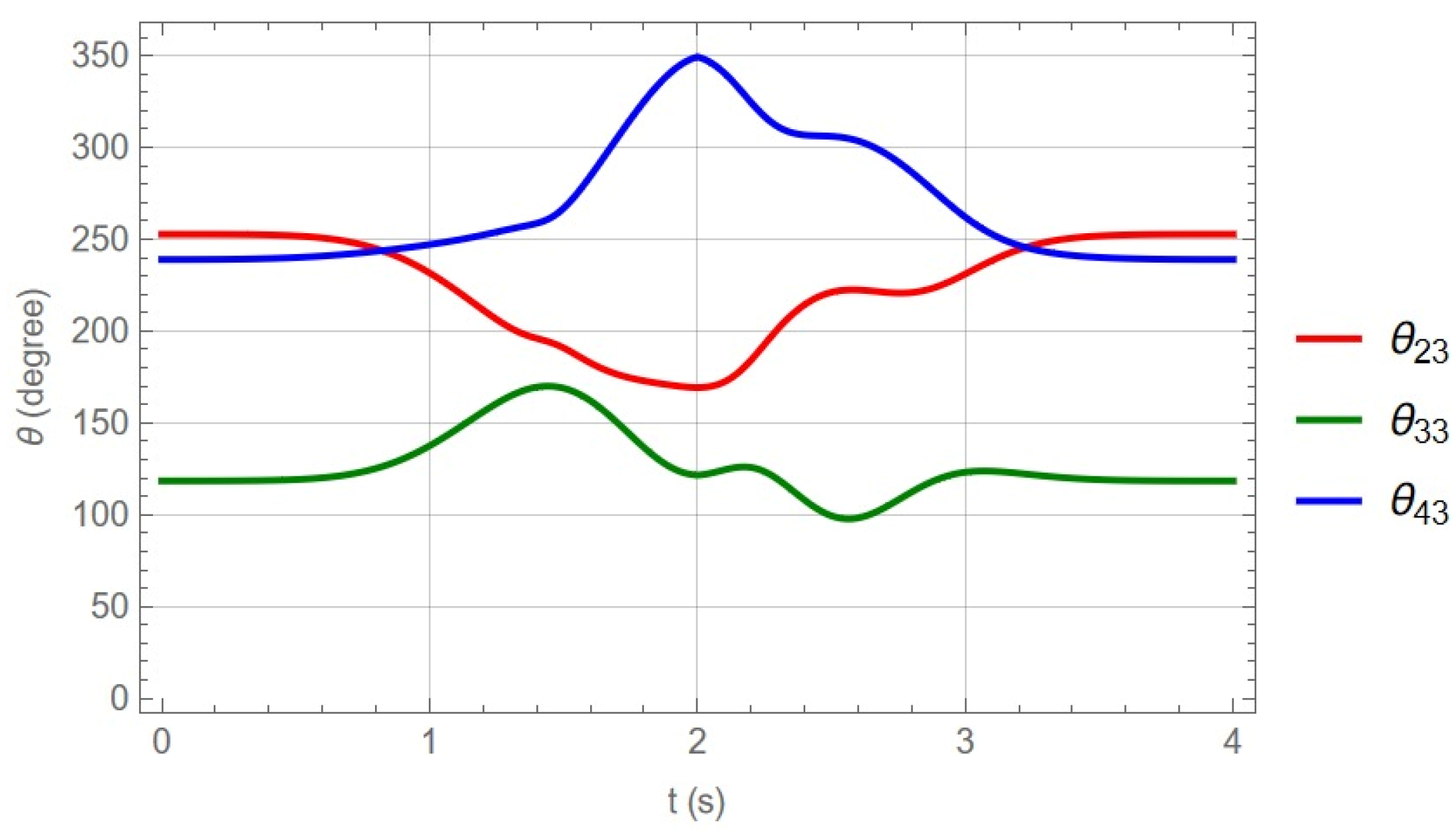
θ3i = 2 tan−1(p3i3/ p3i0)
θ4i = 2 tan−1(p4i3/ p4i0)
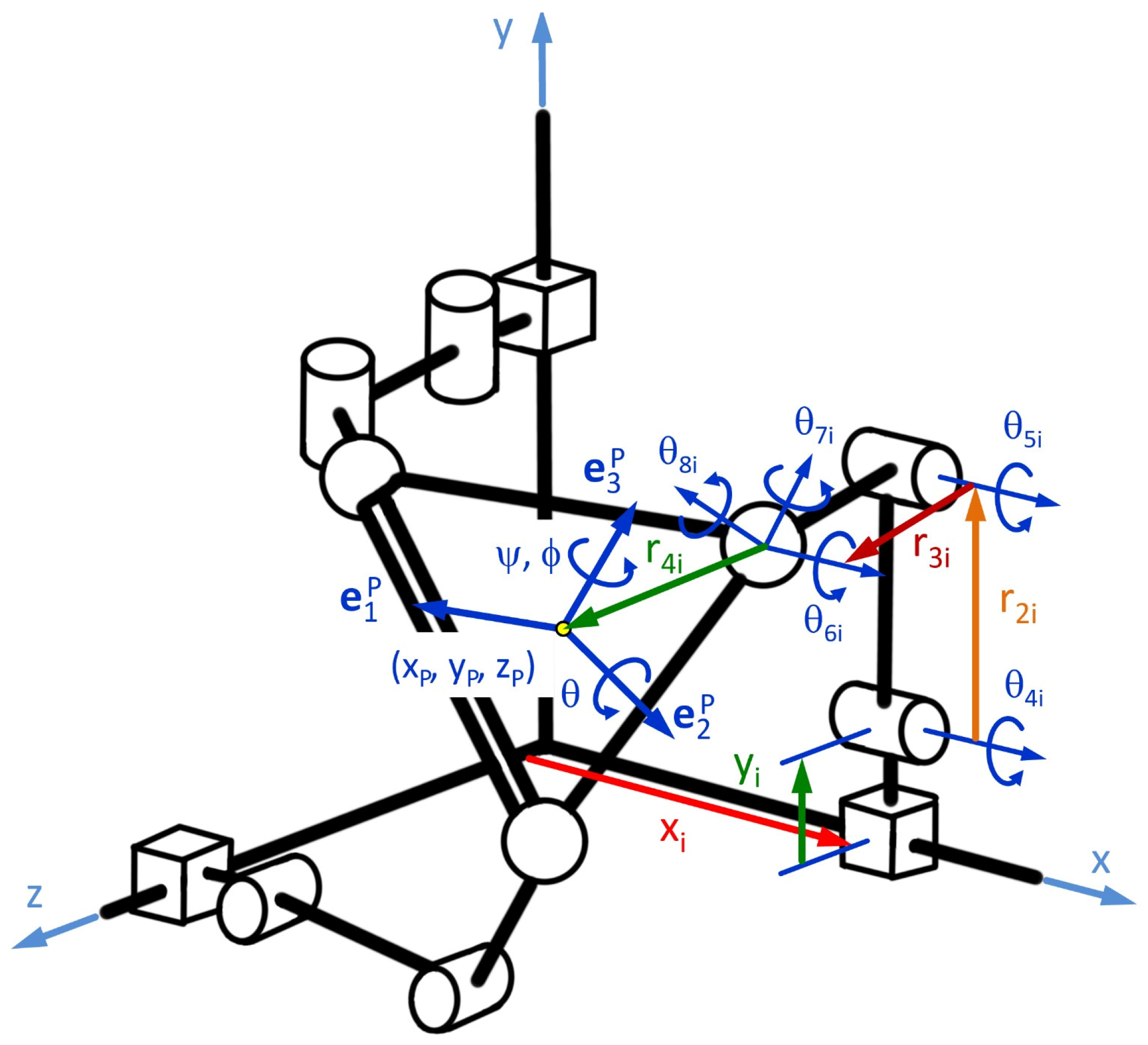
2.5. Modeling of a PRRS Spatial Parallel Robot
2.5.1. 3-PRRS Robot Loop Equations
‖p5i‖2 = 1
‖p6i‖2 = 1
‖p7i‖2 = 1
‖p8i‖2 = 1
R1yi = yi e21i
R2i = r2i e22i
R3i = r3i e23i
R4i = r4i e14i
RP = (0, xP, yP, zP)
e22i = ρ(q2i, e1); q2i = q1i∗p4i
e23i = ρ(q3i,e1); q3i = q2i∗p5i
e14i = ρ(q4i, e1); q4i = q3i∗p6i∗p7i∗p8i
ej5i = ρ(q5i, ej); q5i = q4i∗p9i
ejP = ρ(qP, ej) qP = pψ∗pθ∗pϕ
p2i = (c(β2i/2), 0, 0, s(β2i/2))
p3i = (c(β3i/2), s(β3i/2), 0, 0)
p4i = (p40i, p41i, 0, 0)
p5i = (p50i, p51i, 0, 0)
p6i = (p60i, 0, 0, p63i)
p7i = (p70i, 0, p72i, 0)
p8i = (p80i, 0, 0, p83i)
p9i = (c(β9i/2), 0, 0, s(β9i/2))
pψ = (c(ψ/2), 0, 0, s(ψ/2))
pθ = (c(θ/2), 0, s(θ/2), 0)
pϕ = (c(ϕ/2), 0, 0, s(ϕ/2))
2.5.2. Equation of Platform Orientation
2.5.3. Formulation of the PRRS-Type Inverse Problem
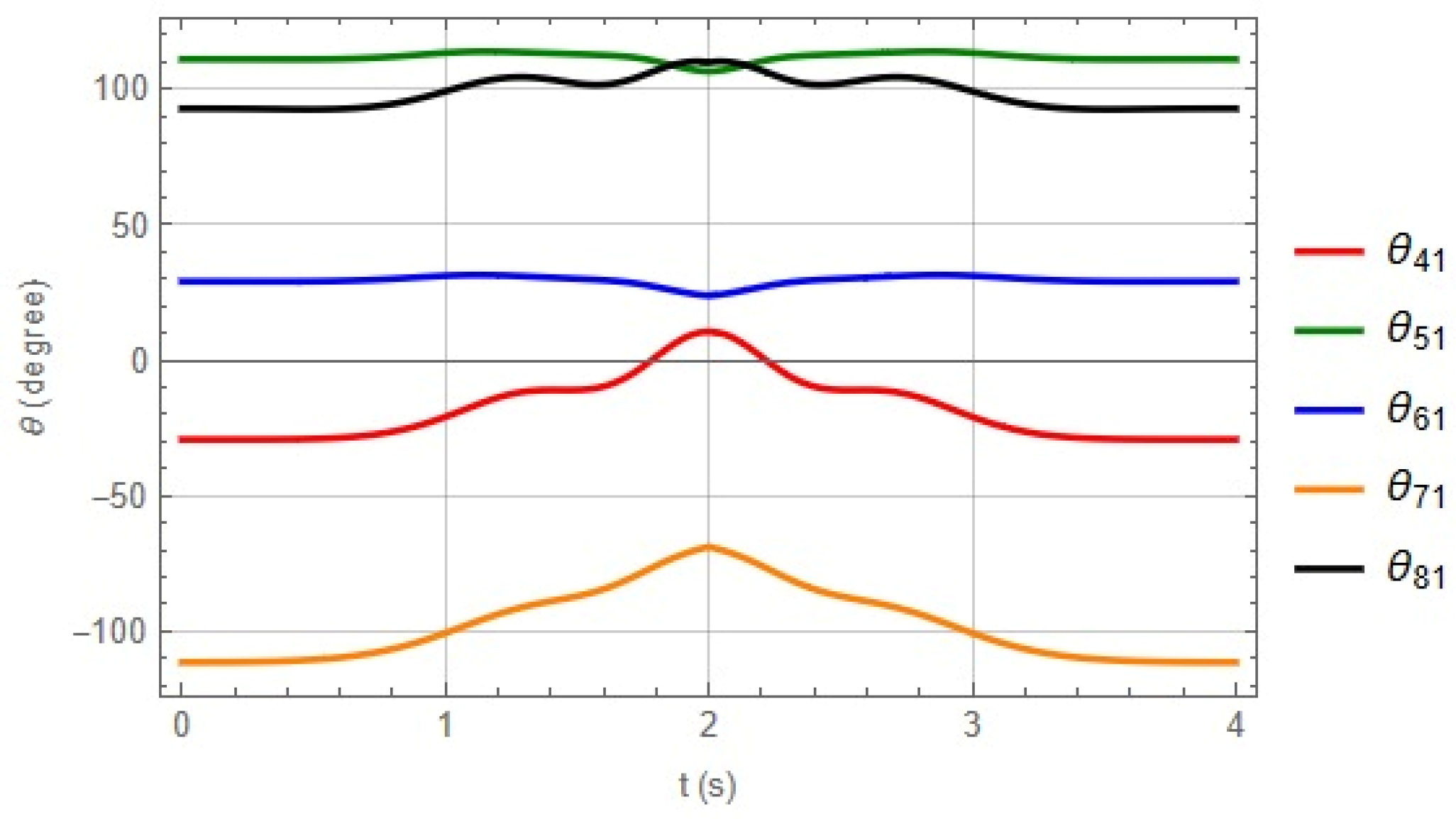
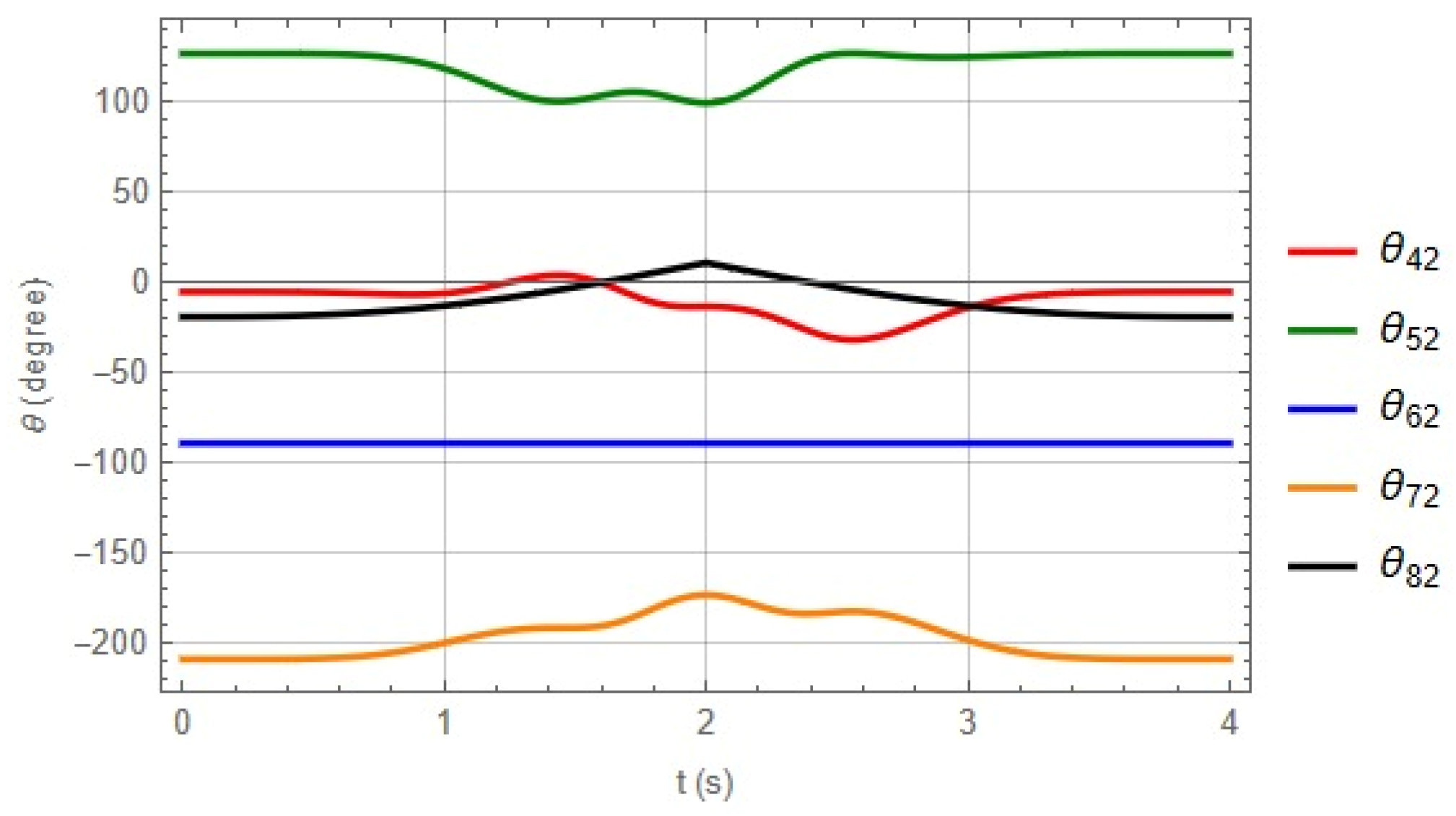
θ5i = 2 tan−1(p51i/p50i)
θ6i = 2 tan−1(p63i/p60i)
θ7i = 2 tan−1(p72i/p70i)
θ8i = 2 tan−1(p83i/p80i)
2.6. Numerical Experimentation
3. Results
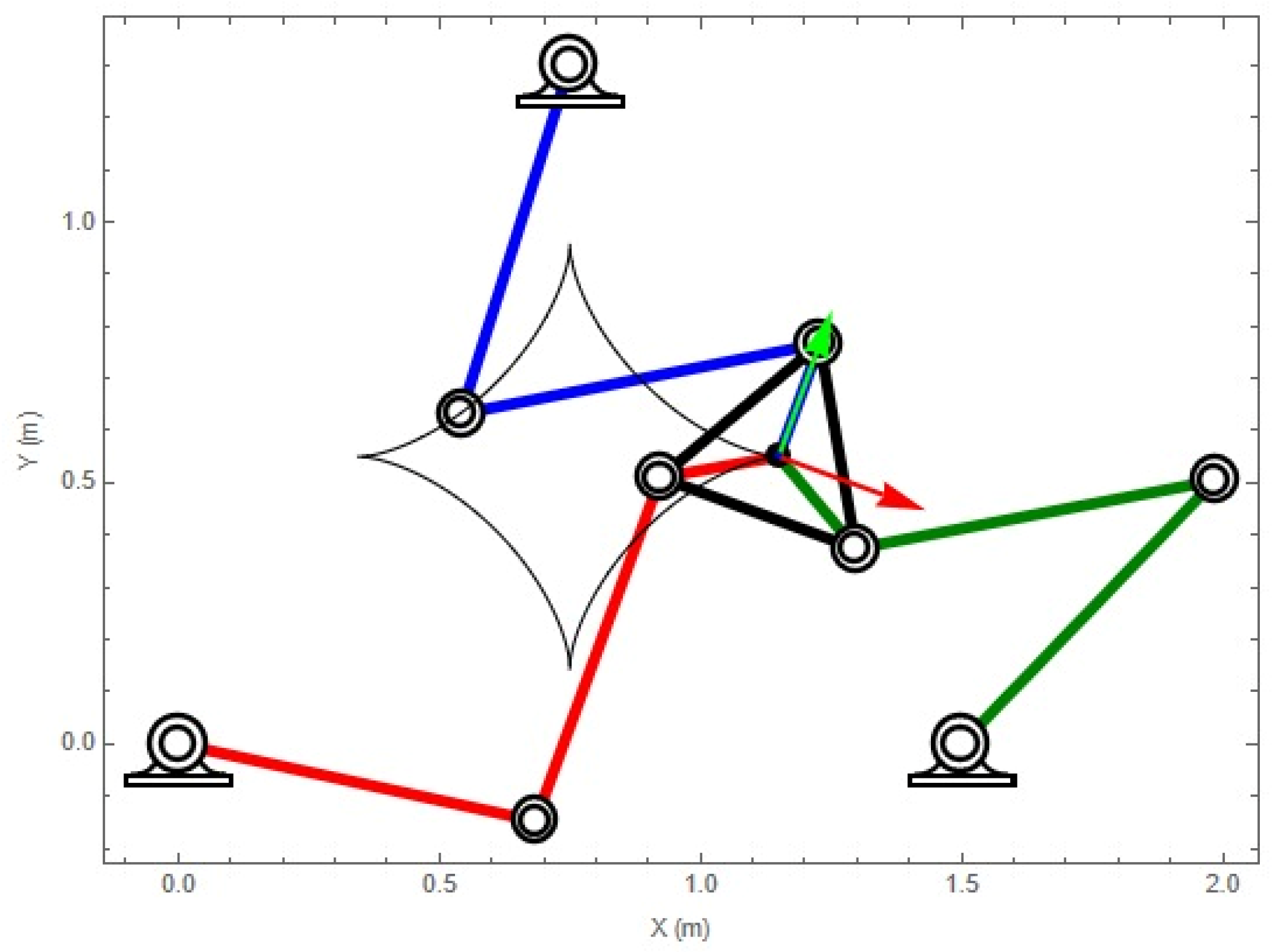
3.1. Numerical Model and Solution for the RRR Parallel Robot
xP = 0.75 + 0.4 cos(s)3
yP = 0.55 + 0.4 sin(s)3
If 2 ≤ t ≤ 4, then θP = (2π − s)/6 − π/9
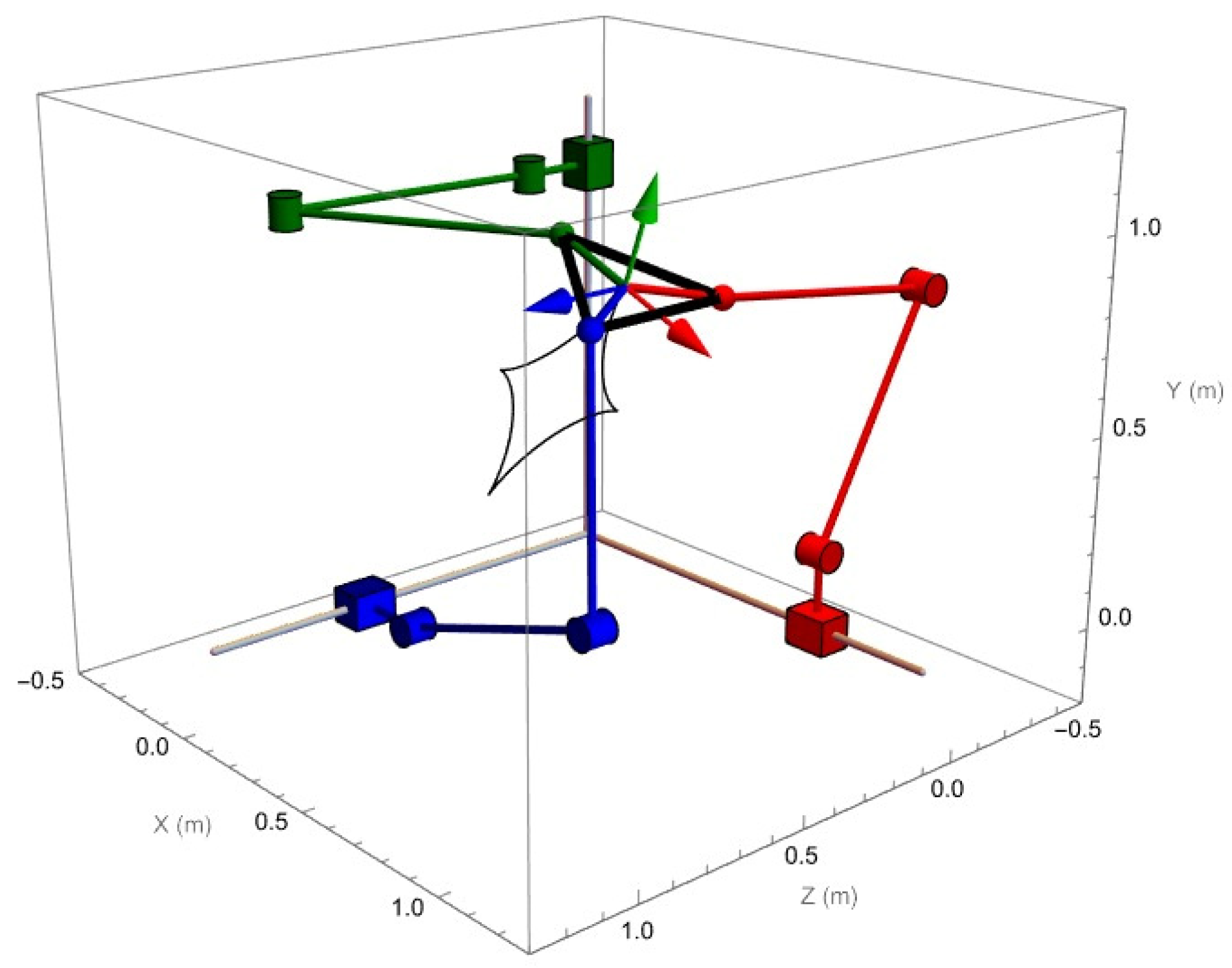
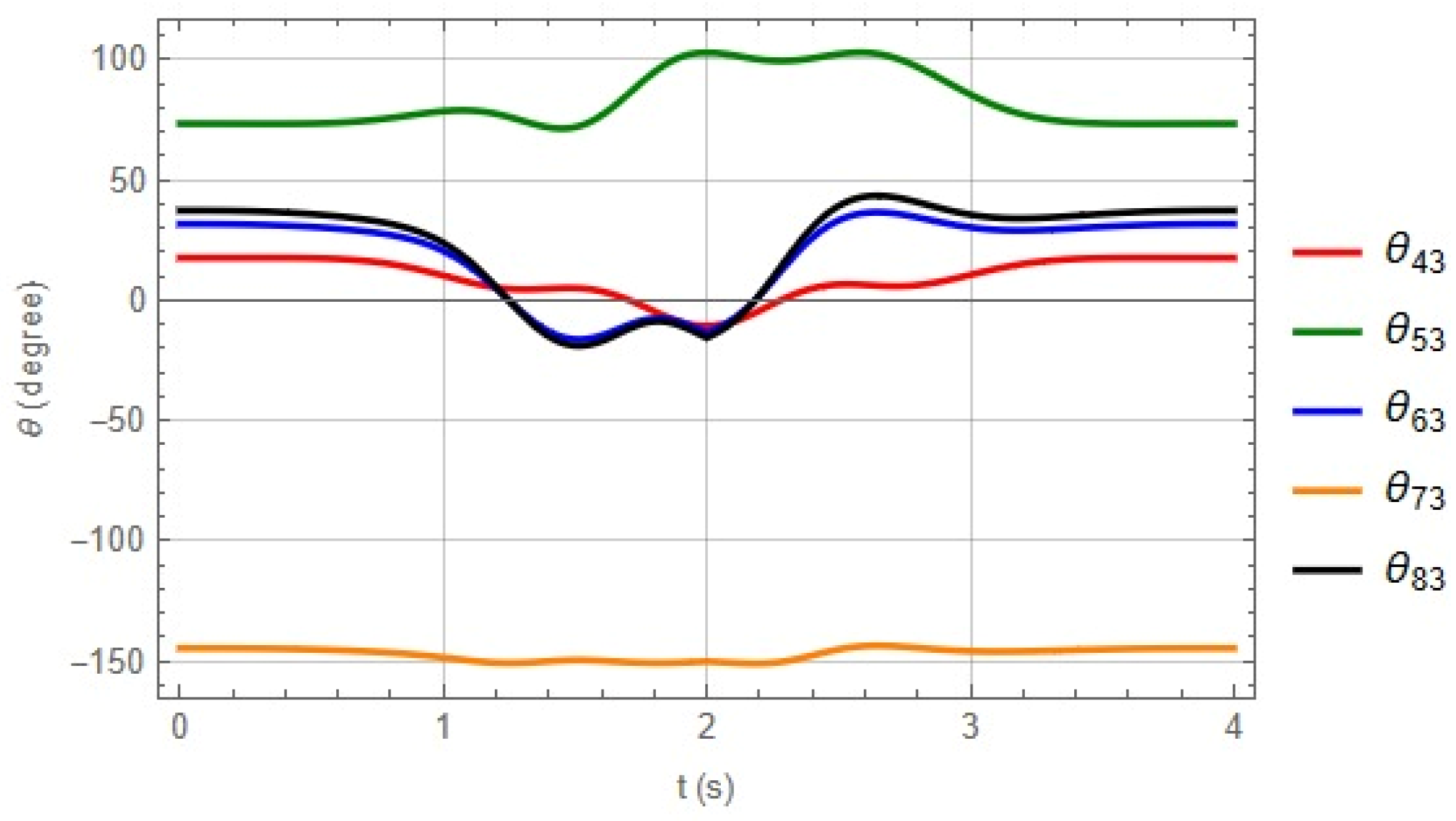
3.2. Numerical Model and Solution for the PRRS Parallel Robot
xP = 0.75 + 0.2 sin(s)3
yP = 0.75 + 0.2 cos(s)3
zP = 0.75 − 0.2 cos(s)3
If 2 ≤ t ≤ 4 then ψ = (2π − s)/6 − π/9
θ = 0
ϕ = 0
4. Discussion
- Quaternions can be considered abstract mathematical manipulations, and it can be understood that they have no direct physical meaning with rigid body rotations.
- One of the limitations of the modeling presented in this research is the analysis of the kinematics since it was developed using a quaternion com-position to express the orientations of a link with respect to the previous one, which generated a system of more equations than unknowns (parameters: p0, p1, p2, p3). It is possible to rewrite the vector loop equations to eliminate unknown quaternions and obtain an equal number of equations and unknowns.
- No established model of coordinate system assignment was followed, which allowed us to adjust to the specific problem, although other assignment methods, such as basic matrices [65], can be used, since both include translation and orientation information.
- The position and orientation equations, together with the quaternion norms, generate a system of nonlinear equations, which implies that the modeling method is highly dependent on numerical methods. This problem is also often encountered by some methods using Euler parameters [66] when solving the initial position of spatial mechanisms by the Broyden–Fletcher–Goldfarb–Shanno numerical method.
- The quaternion parameters are not independent since they must satisfy a normalization constraint, adding one more equation to the system of equations.
- In this research, only one quaternion was used for each transformation, representing one axis orientation to obtain the coordinate system attached to each link.
- The kinematics was performed using vector equations of position and orientation, and these equations can be preserved for analysis with higher derivatives. A relevant fact in this work was that the equations that represented the orientations of the mobile platforms of the 3-RRR and 3-PRRS robots were of the vectorial type, when they are commonly represented in matrix form.
- The modeling is relatively complicated since four transformations given by homogeneous matrices are required to obtain the coordinate system attached to each link.
- The use of rotations and translations on the x and z axes limits the modeling, and some parameters, such as distances or fixed angles, are not necessary to represent links and joints, as in the case of spherical joints.
- A disadvantage of the D-H method is the necessity of defining coordinate systems following a convention instead of fitting the specific problem.
- Some serious problems may arise when applying D-H in kinematic error calibration [67].
- The advantage of the D-H matrix method is its conceptual comprehensibility, allowing the user to describe complex systems of multibody systems in a straightforward manner with basic knowledge of matrix operations and their derivatives.
- Algorithms have been developed for the kinematics of open and closed loop systems. In addition, different types of kinematic joints commonly used in robots and mechanisms have been modeled with this method [68].
- In the same way, there are numerical methods developed for the solution of the equations obtained by constructing the equations of the matricial loops [68].
5. Conclusions
- The methodology proposed in this work and the application of unitary quaternions in the modeling process made it possible to build in a systematic and functional way the mathematical models that define the inverse kinematic problem of a flat RRR-type robot and a PRRS-type space robot.
- The mathematical models obtained by applying the methodology to each robot had the following characteristics: (1) the inverse kinematic problem associated with the RRR robot generated a system of 21 nonlinear equations with 18 polynomial-type unknowns, and (2) the inverse kinematic problem associated with the PRRS robot generated a system of 36 nonlinear equations with 33 polynomial-type unknowns.
- To solve the mathematical models generated from the inverse kinematic problem approach in both robots, two linear and angular trajectories were used, and the Broyden–Fletcher–Goldfarb–Shanno numerical method was used to calculate the parameters of the quaternions that define the rotations and displacements of each joint. The BFGS optimization method was used due to the high number of equations and unknowns related to the mathematical models of both robots and the advantage offered by formal calculation packages such as Mathematica V12, which has a such method programmed.
- The systematization of unitary quaternions developed by Reyes [25] and applied by Jiménez et al. [24] in the modeling of a PUMA robot allowed the construction of kinematic models of parallel robots using the binary operations of addition and multiplication between quaternions. Thus, it was possible to model open and closed kinematic chains in a systematic way, which increases the scope of the theory developed by [25].
- To improve and apply the methodology presented in this work, it will be necessary to model parallel robots with complex configurations, such as cable-driven parallel robots [69]. In addition, it will be necessary to compare the unitary quaternion methodology with other methodologies, such as the screw theory [70], in order to know their differences and similarities.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PUMA | Programmable Universal Manipulation Arm |
| DOF | Degree of Freedom |
| BFGS | Broyden–Fletcher–Goldfarb–Shanno |
| RRR | Rotational, Rotational, Rotational |
Appendix A
- (1)
- Quaternions p1, p2, and p3 are associated with the axes x, y, and z, respectively, which will rotate with the body as shown in Figure A1a.
- (2)
- The rotation in the x-axis is produced using the quaternion p1. The ej1 basis elements and the quaternions experience the rotation shown in Figure A1b.
- (3)
- Subsequently, the rotation in the y1 axis is produced using the quaternion p21 (previously rotated). The ej2 basis elements and the quaternions undergo the rotation shown in the Figure A1c.

References
- Pott, A.; Hiller, M. Kinematic Modeling, Linearization and First-Order Error Analysis. In Parallel Manipulators, Towards New Applications, 1st ed.; Wu, H., Ed.; Intechopen: Rijeka, Croatia, 2008; pp. 155–174. [Google Scholar] [CrossRef]
- Merlet, J.; Gosselin, C. Parallel Mechanisms and Robots. In Springer Handbook of Robotics, 1st ed.; Siciliano, B., Khatib, O., Eds.; Springer: Berlin, Heidelberg, 2008; pp. 269–285. [Google Scholar]
- Himam, S.; Satish, G.; Subba, N.V. Relative Kinematic Analysis of Serial and Parallel Manipulators. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, England, 2018; Volume 455, p. 012040. [Google Scholar] [CrossRef]
- Olarra, A.; Axinte, D.; Uriarte, L.; Bueno, R. Machining with the WalkingHex: A walking parallel kinematic machine tool for in situ operations. CIRP Ann. 2017, 66, 361–364. [Google Scholar] [CrossRef]
- Baptiste, J. On the Improvements of a Cable-Driven Parallel Robot for Achieving Additive Manufacturing for Construction. In Cable-Driven Parallel Robots. Mechanisms and Machine Science; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Springer: Cham, Switzerland, 2018; Volume 53, pp. 353–363. [Google Scholar] [CrossRef]
- Li, P.; Shu, T.; Wen, X.; Tian, W. Dynamic Visual Servoing of A 6-RSS Parallel Robot Based on Optical CMM. J. Intell. Robot. Syst. 2021, 102, 40. [Google Scholar] [CrossRef]
- Ersoy, O.; Yildirim, M.C.; Ahmad, A.; Yirmibesoglu, O.D.; Koroglu, N.; Bebek, O. Design and Kinematics of a 5-DOF Parallel Robot for Beating Heart Surgery. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 12 September 2019; pp. 274–279. [Google Scholar] [CrossRef]
- Vaida, C.; Birlescus, I.; Pisla, A.; Ionut, U.; Tarnita, D.; Carbone, J. Systematic Design of a Parallel Robotic System for Lower Limb Rehabilitation. IEEE Access 2020, 8, 34522–34537. [Google Scholar] [CrossRef]
- Chang, Z.; Yue, F. Design and Analysis for a Three-Rotational-DOF Flight Simulator of Fighter-Aircraft. Chin. J. Mech. Eng. 2018, 31, 55. [Google Scholar] [CrossRef]
- Wang, S.; Zheng, K.; Chen, Y.; Xu, M.; Wang, D. DOF and kinematics analysis of a 3-UPU parallel mechanism for telescope secondary mirror support. In AOPC 2021: Novel Technologies and Instruments for Astronomical Multi-Band Observations, 120690C; SPIE: Bellingham, WA, USA, 2021. [Google Scholar] [CrossRef]
- Sholanov, K.S. Kinematics of One-Loop Parallel Manipulators. In Parallel Manipulators of Robots. Mechanisms and Machine Science; Springer: Cham, Switzerland, 2021; Volume 92, pp. 67–87. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, H.; Zhang, H.; Xu, Z.; Xiong, Y.; Han, K.; Li, Y. Acceleration analysis of 6-RR-RP-RR parallel manipulator with offset hinges by means of a hybrid method. Mech. Mach. Theory 2022, 169, 104661. [Google Scholar] [CrossRef]
- Hamdoun, O.; El Bakkali, L.; Zahra, F. Analysis and Optimum Kinematic Design of a Parallel Robot. Procedia Eng. 2017, 181, 214–220. [Google Scholar] [CrossRef]
- Yao, S.; Li, H.; Zeng, L.; Zhang, X. Vision-based adaptive control of a 3-RRR parallel positioning system. Sci. China Technol. Sci. 2018, 61, 1253–1264. [Google Scholar] [CrossRef]
- Baron, N.; Philippides, A.; Rojas, N. A Geometric Method of Singularity Avoidance for Kinematically Redundant Planar Parallel Robots. In Advances in Robot Kinematics. ARK 2018; Springer Proceedings in Advanced Robotics; Lenarcic, J., Parenti, V., Eds.; Springer: Cham, Switzerland, 2019; Volume 8, pp. 187–194. [Google Scholar] [CrossRef]
- Meng, Q.; Xie, F.; Liu, X.; Takeda, Y. Screw Theory-Based Motion/Force Transmissibility Analysis of High-Speed Parallel Robots with Articulated Platforms. J. Mech. Robot. 2020, 12, 041011. [Google Scholar] [CrossRef]
- Chai, X.; Wang, M.; Xu, L.; Ye, W. Dynamic Modeling and Analysis of a 2PRU-UPR Parallel Robot Based on Screw Theory. IEEE Access 2020, 8, 78868–78878. [Google Scholar] [CrossRef]
- Jiménez, E.; Servín de la Mora, D.; Servín de la Mora, R.; Ochoa, F.; Acosta, M.; Luna, G. Modeling in Two Configurations of a 5R 2-DoF Planar Parallel Mechanism and Solution to the Inverse Kinematic Modeling Using Artificial Neural Network. IEEE Access 2021, 9, 68583–68594. [Google Scholar] [CrossRef]
- Thiruvengadam, S.; Tan, J.S.; Miller, K.A. Generalised Quaternion and Clifford Algebra Based Mathematical Methodology to Effect Multi-stage Reassembling Transformations in Parallel Robots. Adv. Appl. Clifford Algebras 2021, 31, 39. [Google Scholar] [CrossRef]
- Xiang, Y.; Li, Q.; Jiang, X. Dynamic rotational trajectory planning of a cable-driven parallel robot for passing through singular orientations. Mech. Mach. Theory 2021, 158, 104223. [Google Scholar] [CrossRef]
- Noppeney, V.; Boaventura, T.; Siqueira, A. Task-space impedance control of a parallel Delta robot using dual quaternions and a neural network. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 440. [Google Scholar] [CrossRef]
- Liu, K.; Kong, X.; Yu, J. Operation mode analysis of lower-mobility parallel mechanisms based on dual quaternions. Mech. Mach. Theory 2019, 152, 103577. [Google Scholar] [CrossRef]
- Dantam, N. Robust and efficient forward, differential, and inverse kinematics using dual quaternions. Int. J. Rob. Res. 2020, 40, 1087–1105. [Google Scholar] [CrossRef]
- Jiménez, E.; Servín de la Mora, D.; Reyes, L.; Servín de la Mora, R.; Melendez, J.; López, A.A. Modeling of Inverse Kinematic of 3-DoF Robot, Using Unit Quaternions and Artificial Neural Network. Robotica 2021, 39, 1230–1250. [Google Scholar] [CrossRef]
- Reyes, R. Quaternions: Une Representation Parametrique Systematique Des Rotation Finies. Partie I: Le Cadre Theorique. In Rapport de Recherche 1303; INRIA: Rocquencourt, France; Le Chesnay, France, 1990. [Google Scholar]
- Reyes, R. Quaternions: Une Representation Parametrique Systematique Des Rotation Finies. Partie II: Quelques Application. In Rapport de Recherche 1454; INRIA: Rocquencourt, France; Le Chesnay, France, 1991. [Google Scholar]
- Murray, A.; Pierrot, F.; Dauchez, P.; McCarthy, J. A planar quaternion approach to the kinematic synthesis of a parallel manipulator. Robotica 1997, 15, 361–365. [Google Scholar] [CrossRef]
- Ruggiu, M.; Kong, X. Reconfiguration Analysis of a 3-DOF Parallel Mechanism. Robotics 2019, 8, 66. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, H.; Liu, H.; Chen, B.; Yao, J.; Wang, Y. Forward kinematics for 6-UPS parallel robot using extra displacement sensor. J. Adv. Mech. Des. Syst. Manuf. 2018, 12, JAMDSM0130. [Google Scholar] [CrossRef]
- Birlescu, I.; Husty, M.; Vaida, C.; Gherman, B.; Tucan, P.; Pisla, D. Joint-Space Characterization of a Medical Parallel Robot Based on a Dual Quaternion Representation of SE(3). Mathematics 2020, 8, 1086. [Google Scholar] [CrossRef]
- Dong, G.Y.; Du, Y.H.; Li, W.P. A Forward Solution Algorithm of 6RUS Parallel Mechanism Based on Dual Quaternion Method. Int. J. Aerosp. Eng. 2023, 2023, 8617435. [Google Scholar] [CrossRef]
- Nigatu, H.; Kim, D. Optimization of 3-DoF Manipulators’ Parasitic Motion with the Instantaneous Restriction Space-Based Analytic Coupling Relation. Appl. Sci. 2021, 11, 4690. [Google Scholar] [CrossRef]
- Kumar, A.; Parhi, D. Dynamic walking of multi-humanoid robots using BFGS Quasi-Newton method aided Artificial potential field approach for uneven terrain. Soft Comput. 2022, 33, 5893–5910. [Google Scholar] [CrossRef]
- Xie, S.; Sun, L.; Wang, Z.; Chen, G. A speedup method for solving the inverse kinematics problem of robotic manipulators. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221104602. [Google Scholar] [CrossRef]
- Haibo, Q.; Yuefa, F.; Sheng, G. Theory of Degrees of Freedom for Parallel Mechanisms with Three Spherical Joints and Its Applications. Chin. J. Mech. Eng. 2015, 28, 737–746. [Google Scholar]
- Abdelrahman, S.; Nada, M.; Salem, A.; Hossam, H. Modeling of Nonlinear 3-RRR Planar Parallel Manipulator: Kinematics and Dynamics Experimental Analysis. Int. J. Mech. Mechatron. Eng. 2020, 20, 175–185. [Google Scholar]
- Zhang, Z.; Wang, L.; Shao, Z. Improving the kinematic performance of a planar 3-RRR parallel manipulator through actuation mode conversion. Mech. Mach. Theory 2018, 130, 86–108. [Google Scholar] [CrossRef]
- Lianchao, S.; Wei, L. Optimization Design by Genetic Algorithm Controller for Trajectory Control of a 3-RRR Parallel Robot. Algorithms 2018, 11, 7. [Google Scholar] [CrossRef]
- Sayed, A.S.; Azar, A.T.; Ibrahim, Z.F.; Ibrahim, H.A.; Mohamed, N.A.; Ammar, H.H. Deep Learning Based Kinematic Modeling of 3-RRR Parallel Manipulator. In Proceedings of the International Conference on Artificial Intelligence and Computer Vision (AICV2020); AICV 2020. Advances in Intelligent Systems and Computing. Hassanien, A.E., Azar, A., Gaber, T., Oliva, D., Tolba, F., Eds.; Springer: Cham, Switzerland, 2020; Volume 1153, pp. 308–321. [Google Scholar] [CrossRef]
- Al, A.; Aldair, A.A.; Chatwin, C. Control of a 3-RRR Planar Parallel Robot Using Fractional Order PID Controller. Int. J. Autom. Comput. 2020, 17, 822–836. [Google Scholar] [CrossRef]
- Geng, J.; Arakelian, V. Partial Shaking Force Balancing of 3-RRR Parallel Manipulators by Optimal Acceleration Control of the Total Center of Mass. In Multibody Dynamics 2019; ECCOMAS 2019. Computational Methods in Applied Sciences; Kecskeméthy, A., Geu, F., Eds.; Springer: Cham, Switzerland, 2019; Volume 53, pp. 375–382. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, K.; Gao, H.; Xiao, P.; Wang, L. Small-angle perturbation method for moving platform orientation to avoid singularity of asymmetrical 3-RRR planner parallel manipulator. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 538. [Google Scholar] [CrossRef]
- Hoang, N.Q.; Vuong, V.D. Inverse Kinematics and Dynamics of a 3RRR Planar Parallel Manipulator in the Presence of Singularities. In Advances in Asian Mechanism and Machine Science; ASIAN MMS 2021. Mechanisms and Machine Science; Khang, N.V., Hoang, N.Q., Ceccarelli, M., Eds.; Springer: Cham, Switzerland, 2021; Volume 113, pp. 228–237. [Google Scholar] [CrossRef]
- Hall, A.S.; Root, R.R.; Sandgren, E. A Dependable Method for Solving Matrix Loop Equations for The General Three-Dimensional Mechanism. J. Eng. Ind. 1977, 99, 547–550. [Google Scholar] [CrossRef]
- Fischer, I.S.; Paul, R.N. Kinematic Displacement Analysis of a Double-Cardan-Joint Driveline. ASME J. Mech. Des. 1991, 113, 263–271. [Google Scholar] [CrossRef]
- Knapp, R. Wolfram Mathematica ® Tutorial Collection Unconstrained Optimization; Wolfram Research, Inc.: Champaign, IL, USA, 2008. [Google Scholar]
- Chen, Z.; Hung, J.C. Application of Quaternion in Robot Control. IFAC Proc. Vol. 1987, 20, 259–263. [Google Scholar] [CrossRef]
- Gouasmi, M.; Ouali, M.; Brahim, F. Robot Kinematics Using Dual Quaternions. Int. J. Robot. Autom. 2021, 1, 13–30. [Google Scholar] [CrossRef]
- Valverde, A.; Tsiotras, P. Spacecraft Robot Kinematics Using Dual Quaternions. Robotics 2018, 7, 64. [Google Scholar] [CrossRef]
- Adorno, B.V.; Marques, M. DQ Robotics: A Library for Robot Modeling and Control. IEEE Robot. Autom. Mag. 2020, 28, 102–116. [Google Scholar] [CrossRef]
- Ahmed, A.; Yu, M.; Chen, F. Inverse Kinematic Solution of 6-DOF Robot-Arm Based on Dual Quaternions and Axis Invariant Methods. Arab. J. Sci. Eng. 2022, 47, 15915–15930. [Google Scholar] [CrossRef]
- Lechuga, L.; Macias, E.; Martínez, G.; Zamora, J.; Bayro, B. Iterative inverse kinematics for robot manipulators using quaternion algebra and conformal geometric algebra. Meccanica 2022, 57, 1413–1428. [Google Scholar] [CrossRef]
- Suh, C.H.; Radcliffe, C.W. Kinematics and Mechanism Design; John Wiley & Sons: New York, NY, USA, 1978. [Google Scholar]
- Merlet, J. Les Robots Parallèles. Traité des Nouvelles Technologies-Série Robotique; Publisher Hermès: Paris, France, 1990. [Google Scholar]
- Shigley, J.E. Elementos de Maquinaria. Mecanismos; McGraw Hill: Mexico City, México, 1995. [Google Scholar]
- Davidon, W.C. Variable Metric Method for Minimization. A.E.C. Research and Development Rept. ANL-5990; 1959. Available online: https://www.osti.gov/servlets/purl/4252678 (accessed on 8 April 2025).
- Mamat, M.; Dauda, M.K.; Mohamed, M.A.; Waziri, M.Y.; Mohamad, F.S.; Abdullah, H. Derivative free Davidon-Fletcher-Powell (DFP) for solving symmetric systems of nonlinear equations. IOP Conf. Ser. Mater. Sci. Eng. 2018, 332, 012030. [Google Scholar] [CrossRef]
- Shoham, M.; Li, C.J.; Hacham, Y.; Kreindler, E.; Weill, R. Neural Network Control of Robot Arms. CIRP Ann. 1992, 41, 407–410. [Google Scholar] [CrossRef]
- Acevedo, J.A. Implementation of Quasi-Newton Methods Thesis. Bachelor’s Thesis, Benemérita Universidad Autónoma de Puebla in Applied Mathematics, Faculty of Mathematical-Physical Sciences, Puebla, México, 2019. [Google Scholar]
- Gholami, O.; Miripour, F.B. Enhanced workspace through the conjoined twins modification of the Stewart platform. Mech. Based Des. Struct. Mach. 2025, 53, 3179–3191. [Google Scholar] [CrossRef]
- Dang, H.V.; Bui, T.M.; Nguyen, T.V.A.; Nguyen, D.H. Experimental validation of dynamic models for high-speed Delta robots. Int. J. Dyn. Control. 2025, 13, 146. [Google Scholar] [CrossRef]
- Ben, H.Z.; Guler, N.; Altaif, A.H. A study of advanced mathematical modeling and adaptive control strategies for trajectory tracking in the Mitsubishi RV-2AJ 5-DOF Robotic Arm. Discov. Robot. 2025, 1, 2. [Google Scholar] [CrossRef]
- Brahmia, A.; Kerboua, A.; Kelaiaia, R.; Latreche, A. Tolerance Synthesis of Delta-like Parallel Robots Using a Nonlinear Optimisation Method. Appl. Sci. 2023, 13, 10703. [Google Scholar] [CrossRef]
- Bai, L.; Dong, Z.F.; Ge, X.S. The closed-loop kinematics modeling and numerical calculation of the parallel hexapod robot in space. Adv. Mech. Eng. 2017, 9, 1–15. [Google Scholar] [CrossRef]
- Stejskal, V.; Valásek, M. Kinematics and Dynamics of Machinery; Marcel Dekker, Inc.: New York, NY, USA, 1996. [Google Scholar]
- Haug, E.J. Computer Aided Kinematics and Dynamics of Mechanical Systems; Allyn and Bacon: Boston, MA, USA, 1989; Volume 1. [Google Scholar]
- Bazerghi, A.; Goldenberg, A.A.; Apkarian, J. An exact kinematic model of PUMA 600 manipulator. IEEE Trans. Syst. Man Cybern. Syst. 1984, 14, 483–487. [Google Scholar] [CrossRef]
- Uicker, J.J.; Ravani, B.; Sheth, P.N. Matrix Methods in the Design Analysis of Mechanisms and Multibody System; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Caverly, R.J.; Cheah, S.K.; Bunker, K.R.; Patel, S.; Sexton, N.; Nguyen, V.L. Online self-calibration of cable-driven parallel robots using covariance-based data quality assessment metrics. J. Mech. Robot. 2025, 17, 010904. [Google Scholar] [CrossRef]
- Zou, Q.; Yi, B.J.; Zhang, D.; Shi, Y.; Huang, G. Design and kinematic analysis of a novel planar parallel robot with pure translations. IEEE Access 2024, 12, 9792–9809. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiménez, F.C.; López, E.J.; Flores, M.A.; Peñuñuri, F.; Escalante, R.J.P.; Vázquez, J.J.D. Methodology for Modeling Coupled Rigid Multibody Systems Using Unitary Quaternions: The Case of Planar RRR and Spatial PRRS Parallel Robots. Robotics 2025, 14, 94. https://doi.org/10.3390/robotics14070094
Jiménez FC, López EJ, Flores MA, Peñuñuri F, Escalante RJP, Vázquez JJD. Methodology for Modeling Coupled Rigid Multibody Systems Using Unitary Quaternions: The Case of Planar RRR and Spatial PRRS Parallel Robots. Robotics. 2025; 14(7):94. https://doi.org/10.3390/robotics14070094
Chicago/Turabian StyleJiménez, Francisco Cuenca, Eusebio Jiménez López, Mario Acosta Flores, F. Peñuñuri, Ricardo Javier Peón Escalante, and Juan José Delfín Vázquez. 2025. "Methodology for Modeling Coupled Rigid Multibody Systems Using Unitary Quaternions: The Case of Planar RRR and Spatial PRRS Parallel Robots" Robotics 14, no. 7: 94. https://doi.org/10.3390/robotics14070094
APA StyleJiménez, F. C., López, E. J., Flores, M. A., Peñuñuri, F., Escalante, R. J. P., & Vázquez, J. J. D. (2025). Methodology for Modeling Coupled Rigid Multibody Systems Using Unitary Quaternions: The Case of Planar RRR and Spatial PRRS Parallel Robots. Robotics, 14(7), 94. https://doi.org/10.3390/robotics14070094