An Improved DHA Star and ADA-DWA Fusion Algorithm for Robot Path Planning

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. DHA* Algorithm
2.1.1. A* Algorithm Principles
2.1.2. Evaluation Function of DHA* Algorithm
- (1)
- Early Stage (Global Exploration):
- (2)
- Intermediate Stage (Balanced Search):
- (3)
- Final Stage (Local Convergence):
2.1.3. Key-Node Selection Strategy for DHA* Algorithm
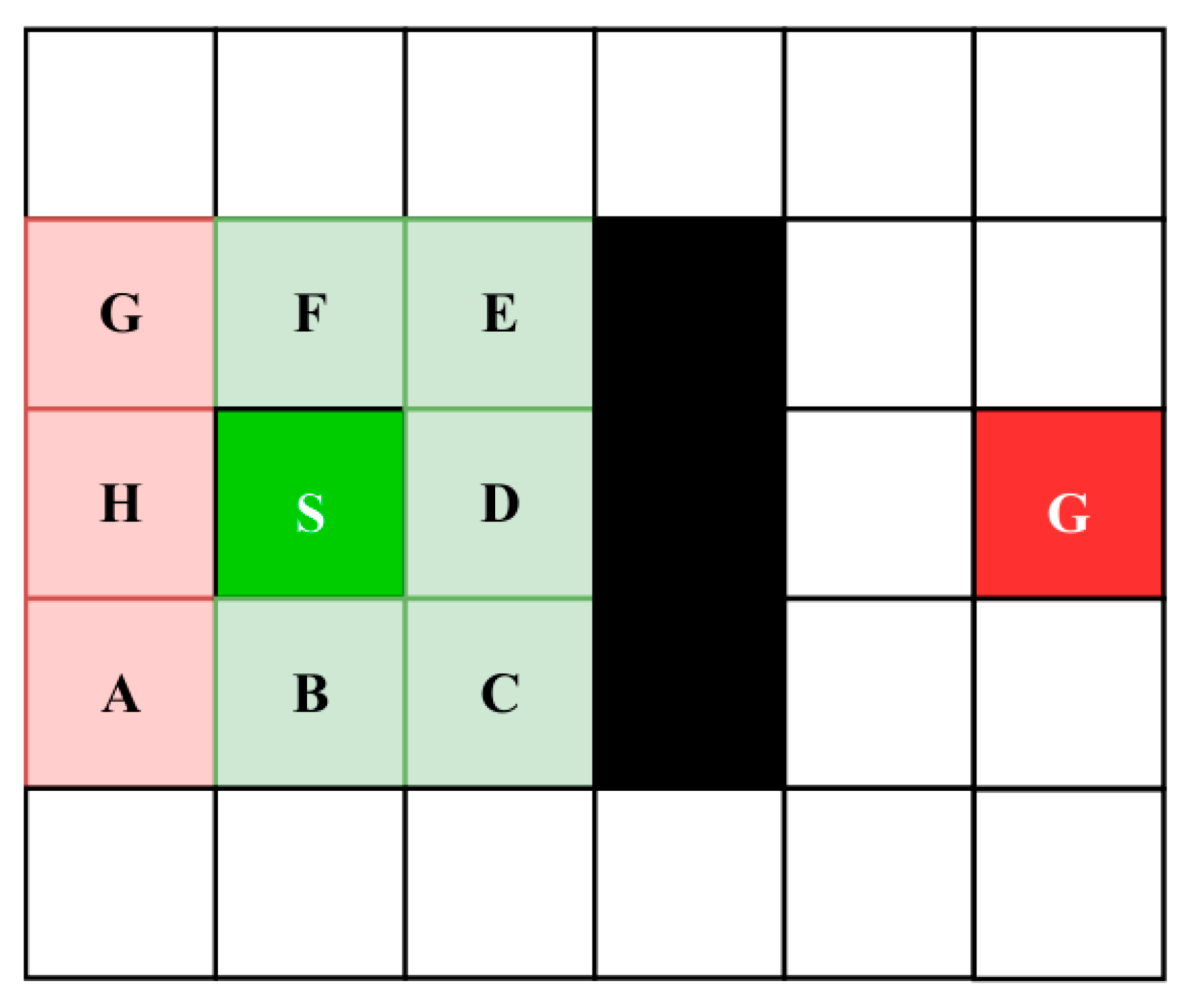
2.1.4. Direction-Aware Neighborhood Search Strategy for DHA* Algorithm
2.2. Adaptive Dynamic Window Approach (ADA-DWA) Algorithm
2.2.1. Robot Kinematic Model and Velocity Sampling
- (1)
- Maximum Velocity Constraints:where and denote the robot’s minimum and maximum linear velocities, while and represents the minimum and maximum angular velocities.
- (2)
- Acceleration/Deceleration Constraints:where and denote the robot’s current linear velocity and angular velocity, represents the maximum linear acceleration/deceleration, and represents the maximum angular acceleration/deceleration.
- (3)
- Safety-Constrained Velocity Bounds:where represents the minimum distance to obstacles along the predicted trajectory, and and are the values of maximum deceleration for linear and angular motion, respectively.
2.2.2. Adaptive Evaluation Function of ADA-DWA
- (1)
- Obstacle Avoidance Priority :
- (2)
- When the robot’s distance to obstacles exceeds a predefined threshold, is increased to prioritize collision avoidance and maintain a safe margin.
- (3)
- Directional Consistency :
- (4)
- If the predicted trajectory deviates from the goal direction by more than an angular threshold, is automatically amplified to realign the robot toward the target.
- (5)
- Velocity Optimization :
- (6)
- Within a safety margin, is elevated to maximize velocity.
- (7)
- Goal Convergence :
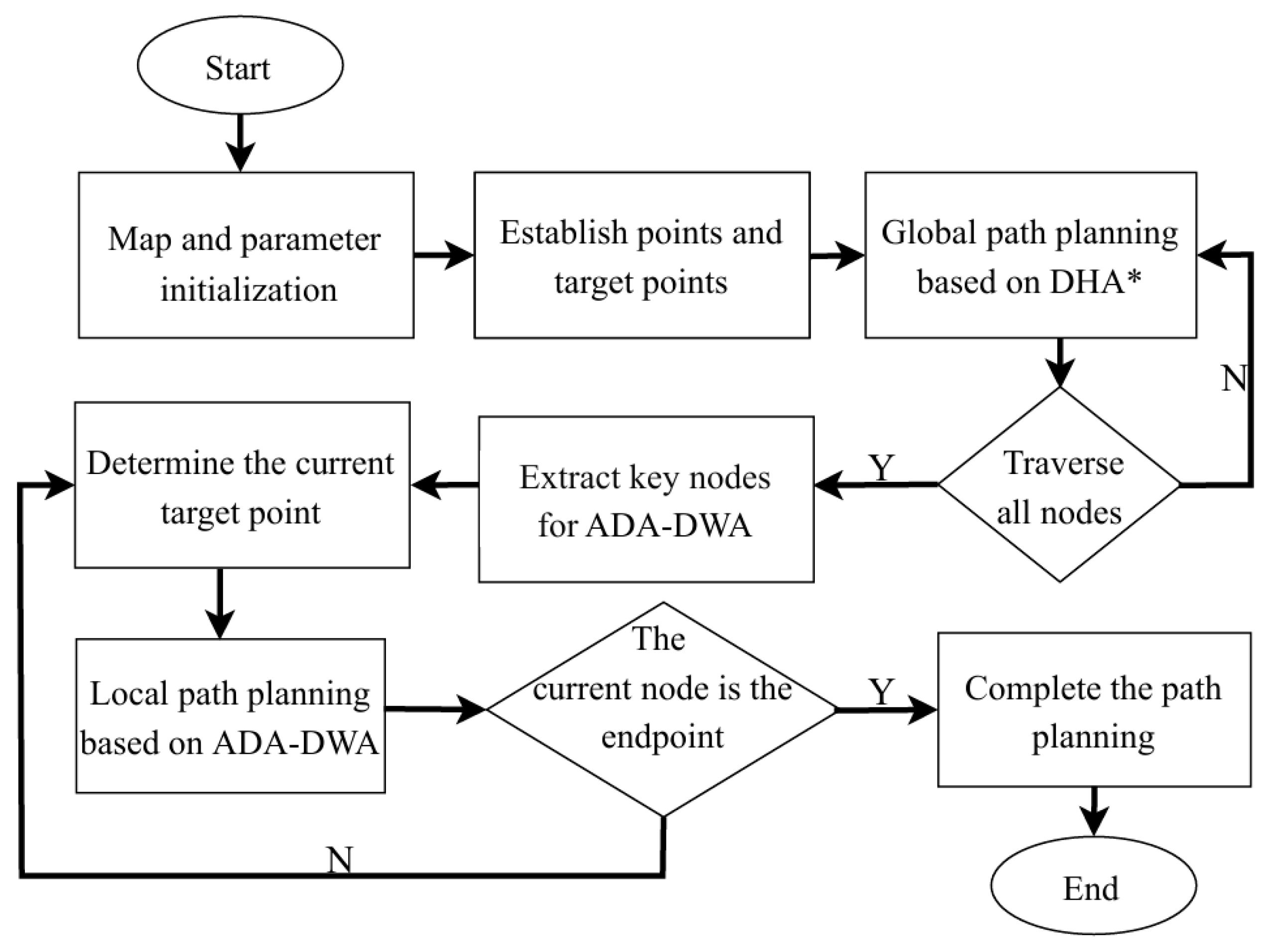
2.3. Fusion of DHA* and ADA-DWA Algorithms
3. Results and Discussion
3.1. Numerical Simulation of DHA* Algorithm
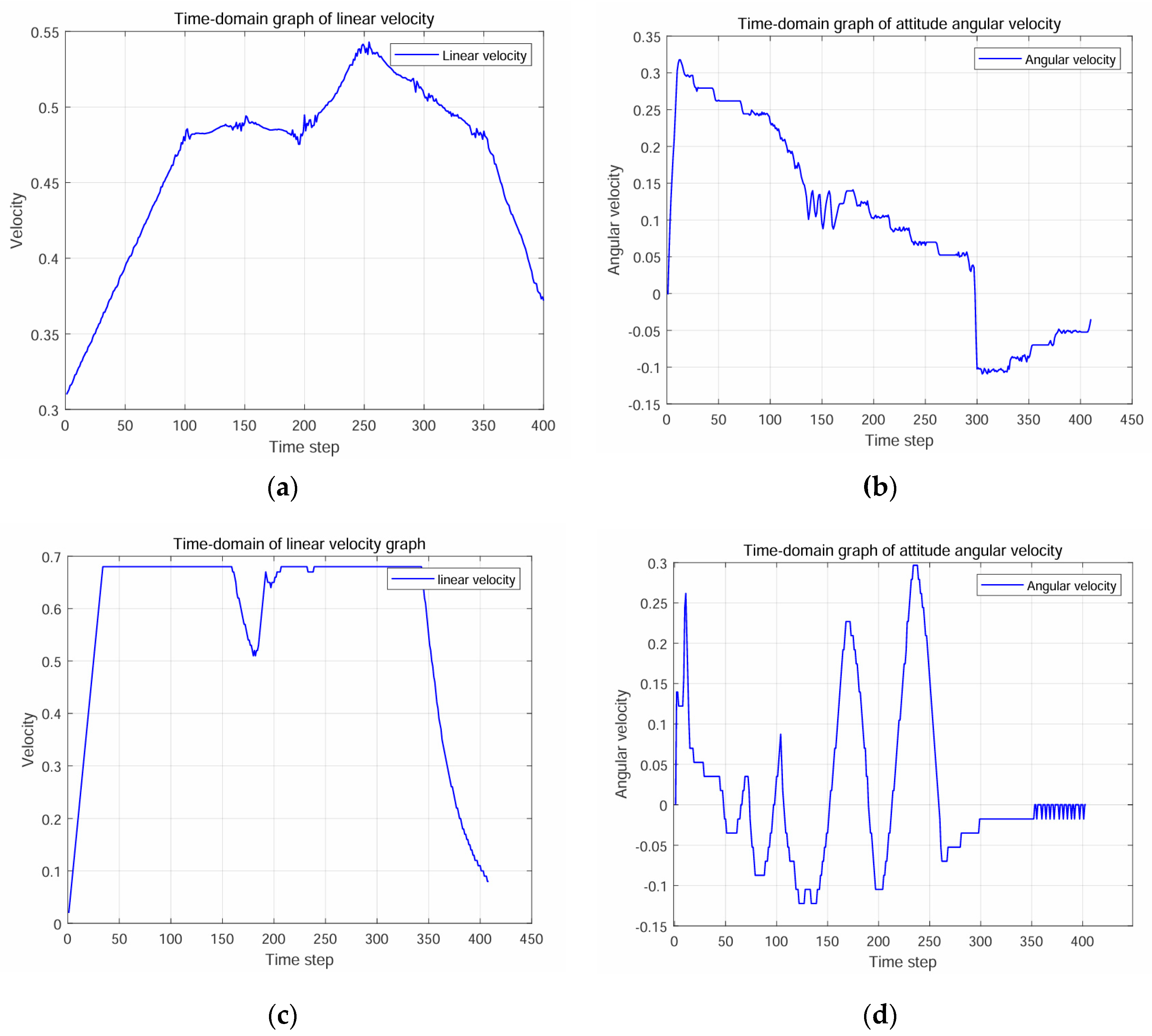
3.2. Numerical Simulation of DHA* and ADA-DWA Fusion Algorithm
3.3. DHA*-ADA-DWA Evaluation in Real Environment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gautam, A.; He, Y.; Lin, X. An Overview of Motion-Planning Algorithms for Autonomous Ground Vehicles with Various Applications. SAE Int. J. Veh. Dyn. Stab. NVH 2024, 8, 179–213. [Google Scholar] [CrossRef]
- Adzhar, N.; Yusof, Y.; Ahmad, M.A. A Review on Autonomous Mobile Robot Path Planning Algorithms. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 236–240. [Google Scholar] [CrossRef]
- Zhou, C.; Huang, B.; Fränti, P. A Review of Motion Planning Algorithms for Intelligent Robots. J. Intelligent. Manuf. 2022, 33, 387–424. [Google Scholar] [CrossRef]
- Sariff, N.; Buniyamin, N. An Overview of Autonomous Mobile Robot Path Planning Algorithms. In Proceedings of the 2006 4th Student Conference on Research and Development, Shah Alam, Malaysia, 27 June 2006; pp. 183–188. [Google Scholar]
- Ayawli, B.B.K.; Chellali, R.; Appiah, A.Y. An Overview of Nature-Inspired, Conventional, and Hybrid Methods of Autonomous Vehicle Path Planning. J. Adv. Transp. 2018, 2018, 8269698. [Google Scholar] [CrossRef]
- Qin, H.; Shao, S.; Wang, T. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones 2023, 7, 211. [Google Scholar] [CrossRef]
- Rafai, A.N.A.; Adzhar, N.; Jaini, N.I. A Review on Path Planning and Obstacle Avoidance Algorithms for Autonomous Mobile Robots. J. Robot. 2022, 2022, 2538220. [Google Scholar] [CrossRef]
- Lin, H.X.; Xiang, D.; Ouyang, J. Review of Path Planning Algorithms for Mobile Robots. Comput. Eng. Appl. 2021, 57, 38–48. [Google Scholar]
- Lin, S.; Liu, A.; Wang, J. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]
- Abed, M.S.; Lutfy, O.F.; Al-Doori, Q.F. A Review on Path Planning Algorithms for Mobile Robots. Eng. Technol. J. 2021, 39, 804–820. [Google Scholar] [CrossRef]
- JMAA, Y.B.E.N.; Duvivier, D. A Review of Path Planning Algorithms. In Proceedings of the International Conference on Intelligent Systems Design and Applications, Cham, Switzerland, 11 December 2023; pp. 119–130. [Google Scholar]
- Yun, Y.; Cheng, W.; Kai, W. A Review of Global Path Planning Algorithms for Mobile Robots. Inf. Rec. Mater. 2022, 23, 29–32. [Google Scholar]
- Tang, Z.; Ma, H. An Overview of Path Planning Algorithms. IOP Conf. Ser. Earth Environ. Sci. 2021, 804, 022024. [Google Scholar] [CrossRef]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic algorithms based approach for autonomous mobile robot path planning. J. Procedia Computer Science 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Yang, L.; Li, P.; Qian, S. Path Planning Technique for Mobile Robots: A Review. Machines 2023, 11, 980. [Google Scholar] [CrossRef]
- Martins, O.; Adekunle, A.; Adejuyigbe, S. Wheeled Mobile Robot Path Planning and Path Tracking Controller Algorithms: A Review. J. Eng. Sci. Technol. Rev. 2020, 13, 152–164. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Song, D. Survey of Robot 3D Path Planning Algorithms. J. Control Sci. Eng. 2016, 2016, 7426913. [Google Scholar] [CrossRef]
- Raja, P.; Pugazhenthi, S. Optimal Path Planning of Mobile Robots: A Review. Int. J. Phys. Sci. 2012, 7, 1314–1320. [Google Scholar] [CrossRef]
- Karur, K.; Sharma, N.; Dharmatti, C. A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Campbell, S.; O’Mahony, N.; Carvalho, A. Path Planning Techniques for Mobile Robots: A Review. In Proceedings of the 2020 6th International Conference on Mechatronics and Robotics Engineering, Barcelona, Spain, 15 December 2021; pp. 12–16. [Google Scholar]
- Guruji, A.K.; Agarwal, H.; Parsediya, D.K. Time-Efficient A* Algorithm for Robot Path Planning. Procedia Technol. 2016, 23, 144–149. [Google Scholar] [CrossRef]
- Hou, Y.; Gao, H.; Wang, Z. Path Planning for Mobile Robots Based on Improved A* Algorithm. In Proceedings of the International Conference on Neural Computing for Advanced Applications, Singapore, 8 July 2022; pp. 169–183. [Google Scholar]
- Di, W.; Caihong, L.; Na, G. Local Path Planning of Mobile Robot Based on Artificial Potential Field. In Proceedings of the 2020 39th Chinese Control Conference, Shenyang, China, 27 July 2020; pp. 3677–3682. [Google Scholar]
- Shi, Y.; Huang, S.; Li, M. An Improved Global and Local Fusion Path-Planning Algorithm for Mobile Robots. Sensors 2024, 24, 7950. [Google Scholar] [CrossRef]
- Gong, X.; Gao, Y.; Wang, F. A Local Path Planning Algorithm for Robots Based on Improved DWA. Electronics 2024, 13, 2965. [Google Scholar] [CrossRef]
- Xu, X.; Zeng, J.; Zhao, Y. Research on Global Path Planning Algorithm for Mobile Robots Based on Improved A. Expert Syst. Appl. 2024, 243, 122922. [Google Scholar] [CrossRef]
- Wang, H.; Ma, X.; Zhu, L. Obstacle Avoidance Path Planning of Mobile Robot Based on Improved DWA. J. Phys. Conf. Ser. 2022, 2383, 012098. [Google Scholar] [CrossRef]
- Zhen, X.; Wei, Y. Mobile Robot Path Planning Based on Fusion of Improved A* Algorithm and Adaptive DWA Algorithm. J. Phys. Conf. Ser. 2022, 2330, 012003. [Google Scholar]
- Jiang, Z.; Wang, W.; Sun, W. Path Planning Method for Mobile Robot Based on a Hybrid Algorithm. J. Intelligent. Robot. Syst. 2023, 109, 47. [Google Scholar] [CrossRef]
- Wang, R.; Ling, M.; Xu, L. Research on Unmanned Vehicle Path Planning Based on Improved A and DWA Fusion Algorithm. J. Robot. Autom. 2024, preprint. [Google Scholar]
- Li, D.; Shi, X.; Dai, M. An Improved Path Planning Algorithm Based on A* Algorithm. In International Conference on Computer Engineering and Networks; Springer Nature: Singapore, 2023; pp. 187–196. [Google Scholar]
- Zhang, D.; Chen, C.; Zhang, G. AGV path planning based on improved A-star algorithm. In Proceedings of the 2024 IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 15–17 March 2024; IEEE: New York, NY, USA, 2024; Volume 7, pp. 1590–1595. [Google Scholar]
- Zhang, J.; Liu, Z.; Wang, Y. Research on Effective Path Planning Algorithm Based on Improved A* Algorithm. J. Phys. Conf. Ser. 2022, 2188, 012014. [Google Scholar] [CrossRef]
- Hu, Y.; Long, H.; Chen, M. The Analysis of Pedestrian Flow in the Smart City by Improved DWA with Robot Assistance. Sci. Rep. 2024, 14, 11456. [Google Scholar] [CrossRef]
- Dai, J.; Li, D.; Zhao, J. Autonomous Navigation of Robots Based on the Improved Informed-RRT* Algorithm and DWA. J. Robot. 2022, 2022, 3477265. [Google Scholar] [CrossRef]
- Sang, W.; Yue, Y.; Zhai, K. Research on AGV Path Planning Integrating an Improved A* Algorithm and DWA Algorithm. Appl. Sci. 2024, 14, 7551. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G. Research on Path Planning Algorithm of Driverless Ferry Vehicles Combining Improved A* and DWA. Sensors 2024, 24, 4041. [Google Scholar] [CrossRef]
- Zhang, J.; Zu, P.; Liu, K.; Zhou, M. A herd-foraging-based approach to adaptive coverage path planning in dual environments. IEEE Trans. Cybern. 2023, 54, 1882–1893. [Google Scholar] [CrossRef] [PubMed]
- Carvalho, J.P.; Aguiar, A.P. Deep reinforcement learning for zero-shot coverage path planning with mobile robots. IEEE/CAA J. Autom. Sin. 2025, 1–16. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maps | Algorithms | ||||
|---|---|---|---|---|---|
| 20 × 20 | Traditional A* Algorithm | ||||
| Reference [31] Algorithm | |||||
| Reference [32] Algorithm | |||||
| DHA* Algorithm | |||||
| 20 × 20 | Traditional A* Algorithm | ||||
| Reference [31] Algorithm | |||||
| Reference [32] Algorithm | |||||
| DHA* Algorithm |
| 2.0 | 0.2 | 45 | 45 |
| 0.1 | 0.1 | 0.05 | 3.0 |
| Maps | Algorithms | Collision Occurred | |||
|---|---|---|---|---|---|
| Traditional A* algorithm | |||||
| Dijkstra algorithm | |||||
| Ant Colony algorithm | |||||
| DHA*-ADA-DWA algorithm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, Y.; Cai, Y.; Zhou, J.; Hu, H.; Ouyang, X.; Mo, J.; Dai, H. An Improved DHA Star and ADA-DWA Fusion Algorithm for Robot Path Planning. Robotics 2025, 14, 90. https://doi.org/10.3390/robotics14070090
Jia Y, Cai Y, Zhou J, Hu H, Ouyang X, Mo J, Dai H. An Improved DHA Star and ADA-DWA Fusion Algorithm for Robot Path Planning. Robotics. 2025; 14(7):90. https://doi.org/10.3390/robotics14070090
Chicago/Turabian StyleJia, Yizhe, Yong Cai, Jun Zhou, Hui Hu, Xuesheng Ouyang, Jinlong Mo, and Hao Dai. 2025. "An Improved DHA Star and ADA-DWA Fusion Algorithm for Robot Path Planning" Robotics 14, no. 7: 90. https://doi.org/10.3390/robotics14070090
APA StyleJia, Y., Cai, Y., Zhou, J., Hu, H., Ouyang, X., Mo, J., & Dai, H. (2025). An Improved DHA Star and ADA-DWA Fusion Algorithm for Robot Path Planning. Robotics, 14(7), 90. https://doi.org/10.3390/robotics14070090