Vibration Propulsion in Untethered Insect-Scale Robots with Piezoelectric Bimorphs and 3D-Printed Legs



Abstract
1. Introduction
2. Materials and Methods
2.1. Device Design
2.2. Robot Fabrication
3. Results
3.1. Electrical Characterization
3.2. Kinetic Characterization
3.3. Power Consumption, Autonomy, and Cost of Transport
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fukuda, T.; Kawamoto, A.; Arai, F.; Matsuura, H. Steering Mechanism of Underwater Micro Mobile Robot. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 1, pp. 363–368. [Google Scholar]
- Kosa, G.; Shoham, M.; Zaaroor, M. Propulsion Method for Swimming Microrobots. IEEE Trans. Robot. 2007, 23, 137–150. [Google Scholar] [CrossRef]
- Mora-Aquino, G.; Rodríguez-Morales, Á.L.; López-Huerta, F.; Delgado-Alvarado, E.; Elvira-Hernández, E.A.; Herrera-May, A.L. Recent Advances in Bioinspired Walking Microbots: Design, Manufacturing, and Challenges. Sens. Actuators A Phys. 2024, 372, 115321. [Google Scholar] [CrossRef]
- Koh, J.-S.; Cho, K.-J. Omegabot: Biomimetic Inchworm Robot Using SMA Coil Actuator and Smart Composite Microstructures (SCM). In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1154–1159. [Google Scholar]
- Wood, R.J. The First Takeoff of a Biologically Inspired At-Scale Robotic Insect. IEEE Trans. Robot. 2008, 24, 341–347. [Google Scholar] [CrossRef]
- Goldberg, B.; Zufferey, R.; Doshi, N.; Helbling, E.F.; Whittredge, G.; Kovac, M.; Wood, R.J. Power and Control Autonomy for High-Speed Locomotion With an Insect-Scale Legged Robot. IEEE Robot. Autom. Lett. 2018, 3, 987–993. [Google Scholar] [CrossRef]
- Yang, X.; Chang, L.; Pérez-Arancibia, N.O. An 88-Milligram Insect-Scale Autonomous Crawling Robot Driven by a Catalytic Artificial Muscle. Sci. Robot. 2020, 5, eaba0015. [Google Scholar] [CrossRef]
- Mao, G.; Schiller, D.; Danninger, D.; Hailegnaw, B.; Hartmann, F.; Stockinger, T.; Drack, M.; Arnold, N.; Kaltenbrunner, M. Ultrafast Small-Scale Soft Electromagnetic Robots. Nat. Commun. 2022, 13, 4456. [Google Scholar] [CrossRef]
- Flynn, A.M. Gnat Robots (And How They Will Change Robotics); MIT Artificial Intelligence Laboratory: Cambridge, MA, USA, 1987. [Google Scholar]
- Zhu, Z.; Kan, R.; Hu, S.; He, L.; Hong, X.; Tang, H.; Luo, W. Recent Advances in High-Performance Microbatteries: Construction, Application, and Perspective. Small 2020, 16, 2003251. [Google Scholar] [CrossRef]
- Ji, X.; Liu, X.; Cacucciolo, V.; Imboden, M.; Civet, Y.; El Haitami, A.; Cantin, S.; Perriard, Y.; Shea, H. An Autonomous Untethered Fast Soft Robotic Insect Driven by Low-Voltage Dielectric Elastomer Actuators. Sci. Robot. 2019, 4, eaaz6451. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Y.; Feng, B.; Wang, D.; Liu, T.; Zhou, H.; Li, H.; Qu, S.; Yang, W. S2worm: A Fast-Moving Untethered Insect-Scale Robot With 2-DoF Transmission Mechanism. IEEE Robot. Autom. Lett. 2022, 7, 6758–6765. [Google Scholar] [CrossRef]
- Liu, Z.; Zhan, W.; Liu, X.; Zhu, Y.; Qi, M.; Leng, J.; Wei, L.; Han, S.; Wu, X.; Yan, X. A Wireless Controlled Robotic Insect with Ultrafast Untethered Running Speeds. Nat. Commun. 2024, 15, 3815. [Google Scholar] [CrossRef]
- Liang, J.; Wu, Y.; Yim, J.K.; Chen, H.; Miao, Z.; Liu, H.; Liu, Y.; Liu, Y.; Wang, D.; Qiu, W.; et al. Electrostatic Footpads Enable Agile Insect-Scale Soft Robots with Trajectory Control. Sci. Robot. 2021, 6, eabe7906. [Google Scholar] [CrossRef]
- Casanova, R.; Dieguez, A.; Arbat, A.; Alonso, O.; Canals, J.; Sanuy, A.; Samitier, J. A 1 mW Low Power SoC for a Mm3-Sized Microrobot. In Proceedings of the 2007 50th Midwest Symposium on Circuits and Systems, Montreal, QC, Canada, 5–8 August 2007; pp. 835–838. [Google Scholar]
- Hariri, H.H.; Soh, G.S.; Foong, S.; Wood, K. Locomotion Study of a Standing Wave Driven Piezoelectric Miniature Robot for Bi-Directional Motion. IEEE Trans. Robot. 2017, 33, 742–747. [Google Scholar] [CrossRef]
- Hernando-García, J.; García-Caraballo, J.L.; Ruiz-Díez, V.; Sánchez-Rojas, J.L. Comparative Study of Traveling and Standing Wave-Based Locomotion of Legged Bidirectional Miniature Piezoelectric Robots. Micromachines 2021, 12, 171. [Google Scholar] [CrossRef]
- Ruiz-Díez, V.; García-Caraballo, J.L.; Hernando-García, J.; Sánchez-Rojas, J.L. 3D-Printed Miniature Robots with Piezoelectric Actuation for Locomotion and Steering Maneuverability Applications. Actuators 2021, 10, 335. [Google Scholar] [CrossRef]
- Robles-Cuenca, D.; Ramírez-Palma, M.R.; Ruiz-Díez, V.; Hernando-García, J.; Sánchez-Rojas, J.L. Miniature Autonomous Robot Based on Legged In-Plane Piezoelectric Resonators with Onboard Power and Control. Micromachines 2022, 13, 1815. [Google Scholar] [CrossRef]
- Kosa, G.; Hunziker, P. Small-Scale Robots in Fluidic Media. Adv. Intell. Syst. 2019, 1, 1900035. [Google Scholar] [CrossRef]
- Uchino, K.; Giniewicz, J. (Eds.) MicroMechatronics; CRC Press: Boca Raton, FL, USA, 2003; ISBN 978-0-429-22326-6. [Google Scholar]
- He, S.; Chen, W.; Tao, X.; Chen, Z. Standing Wave Bi-Directional Linearly Moving Ultrasonic Motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1133–1139. [Google Scholar] [CrossRef]
- Ruiz-Díez, V.; Hernando-García, J.; Toledo, J.; Ababneh, A.; Seidel, H.; Sánchez-Rojas, J.L. Piezoelectric MEMS Linear Motor for Nanopositioning Applications. Actuators 2021, 10, 36. [Google Scholar] [CrossRef]
- Bahreyni, B. Chapter 6—Damping Mechanisms. In Fabrication and Design of Resonant Microdevices; Bahreyni, B., Ed.; Micro and Nano Technologies; William Andrew Publishing: Norwich, NY, USA, 2009; pp. 113–128. ISBN 978-0-8155-1577-7. [Google Scholar]
- Leissa, A.W. Vibration of Plates; Acoustical Society of America: Melville, NY, USA, 1969. [Google Scholar]
- Ruiz-Díez, V.; Manzaneque, T.; Hernando-García, J.; Ababneh, A.; Kucera, M.; Schmid, U.; Seidel, H.; Sánchez-Rojas, J.L. Design and Characterization of AlN-Based in-Plane Microplate Resonators. J. Micromech. Microeng. 2013, 23, 074003. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.-Y.; Wood, R.J. Driving High Voltage Piezoelectric Actuators in Microrobotic Applications. Sens. Actuators A Phys. 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Increase Piezoelectric Transducer Acoustic Output with a Simple Circuit—EDN. Available online: https://www.edn.com/increase-piezoelectric-transducer-acoustic-output-with-a-simple-circuit/ (accessed on 1 August 2024).
- Sensor de Vibraciones RS PRO, −15 °C → +55 °C, 15 × 1.5 × 0.6 mm|RS. Available online: https://es.rs-online.com/web/p/sensores-de-vibracion/0285784?gb=s (accessed on 1 August 2024).
- Wang, Q.-M.; Cross, L.E. Performance Analysis of Piezoelectric Cantilever Bending Actuators. Ferroelectrics 1998, 215, 187–213. [Google Scholar] [CrossRef]
- Rigid 10K Resin. Available online: https://formlabs.com/store/materials/rigid-10k-resin/ (accessed on 1 August 2024).
- Labonte, D.; Federle, W. Scaling and Biomechanics of Surface Attachment in Climbing Animals. Philos. Trans. R. Soc. B Biol. Sci. 2015, 370, 20140027. [Google Scholar] [CrossRef] [PubMed]
- Pila de Botón LIR1654, 3.7 V, 90 mAh, Litio|RS. Available online: https://es.rs-online.com/web/p/pilas-de-boton/1834288?searchId=21a199f8-76f7-48b8-b1fc-5a5bef91498c&gb=s (accessed on 3 September 2024).
- Ruiz, V.; Hernando-García, J.; Ababneh, A.; Seidel, H.; Schmid, U.; Sánchez-Rojas, J.L. Modelling and Characterization of AlN-Actuated Microcantilevers Vibrating in the First in-Plane Mode. Microsyst. Technol. 2012, 18, 997–1001. [Google Scholar] [CrossRef]
- Hedrick, T.L. Software Techniques for Two- and Three-Dimensional Kinematic Measurements of Biological and Biomimetic Systems. Bioinspir. Biomim. 2008, 3, 034001. [Google Scholar] [CrossRef]
- Kim, S.; Wensing, P.M. Design of Dynamic Legged Robots. Found. Trends Robot. 2017, 5, 117–190. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
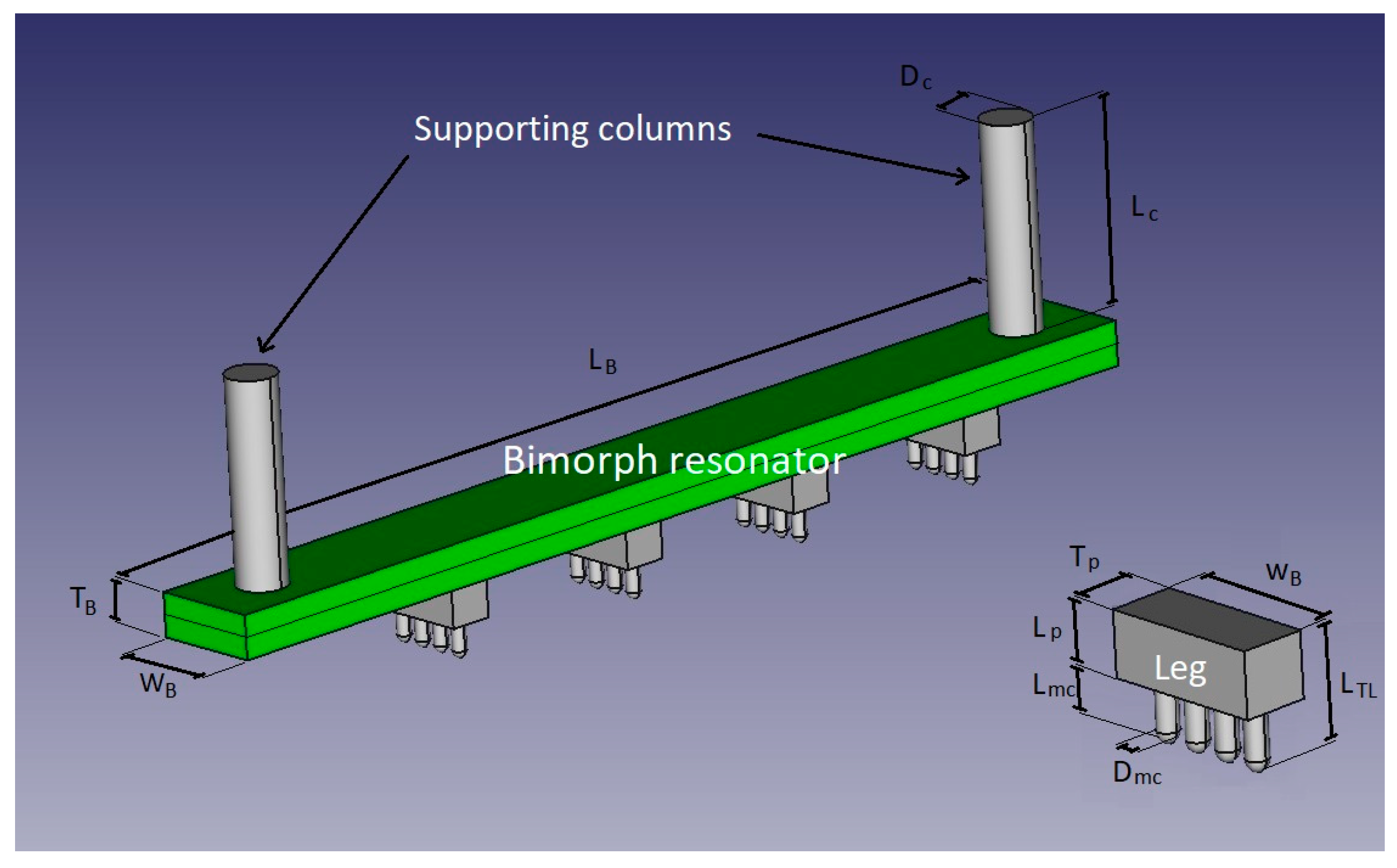
| Component | Dimensions (mm) |
|---|---|
| Supporting columns | |
| Bimorph resonator | |
| Leg |
| Component | Mass (g) |
|---|---|
| 3D-printed legs and supporting columns | 0.008 |
| Wires and welding | 0.026 |
| Pin header connectors | 0.076 |
| Two bimorph plates | 0.210 |
| Electrical contact for battery | 0.596 |
| High-voltage piezo drive PCB | 0.916 |
| 3D-printed supporting platform | 1.121 |
| Microcontroller | 1.197 |
| Battery | 3.270 |
| Total Mass | 7.42 |
| Resonant Mode | ||||||
|---|---|---|---|---|---|---|
| Mode (50) | Mode (60) | |||||
| Electrode Layout | Frequency (kHz) | Q-Factor | ΔG (µS) | Frequency (kHz) | Q-Factor | ΔG (µS) |
| 69.6 | 69 | 76 | 100.6 | 60 | 68 | |
| 68.8 | 65 | 216 | 99.6 | 58 | 159 | |
| 68.7 | 67 | 299 | 99.5 | 61 | 245 | |
| 68.5 | 65 | 327 | 99.2 | 59 | 273 | |
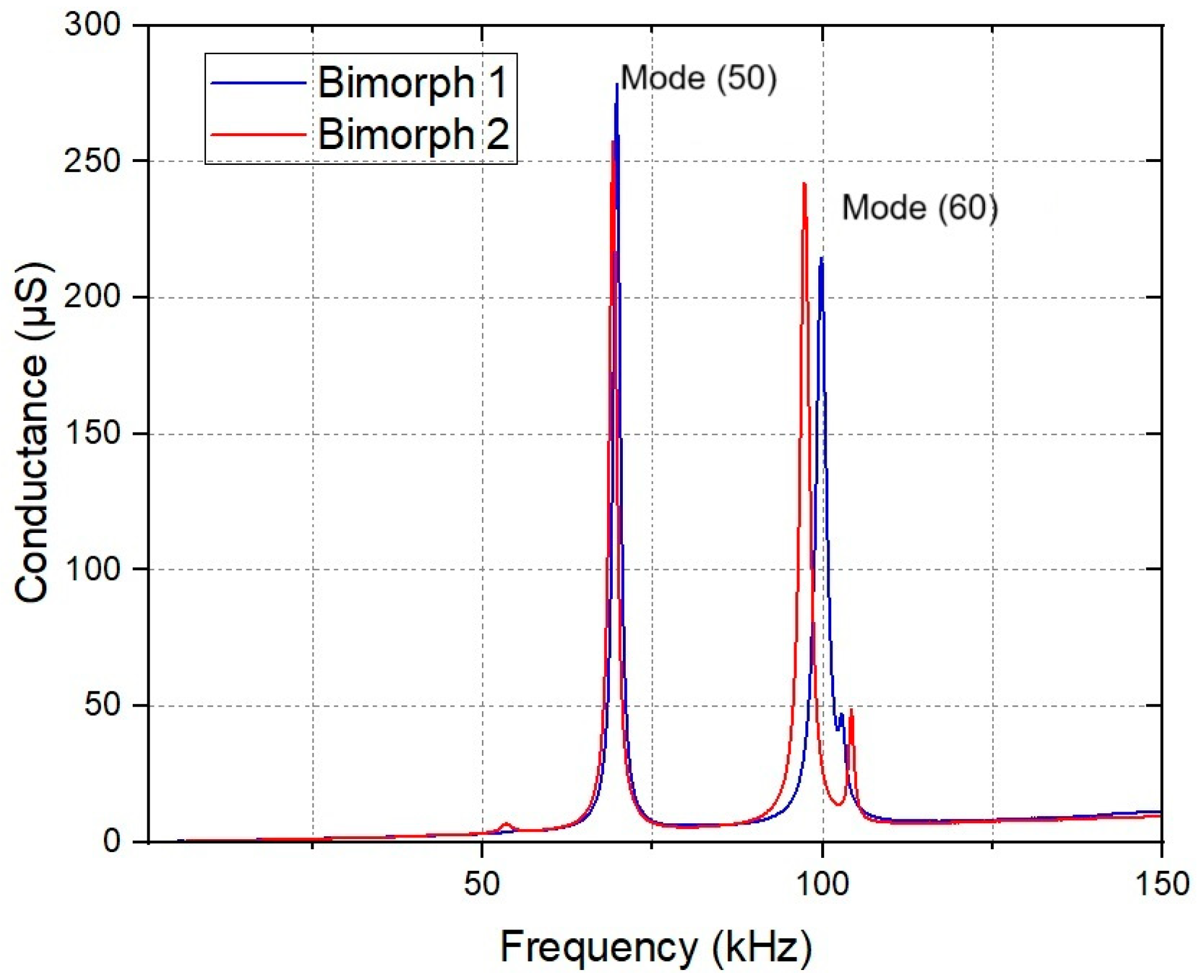
| Resonant Mode | ||||||
|---|---|---|---|---|---|---|
| Mode (50) | Mode (60) | |||||
| Bimorph | Frequency (kHz) | Q-Factor | ΔG (µS) | Frequency (kHz) | Q-Factor | ΔG (µS) |
| 1 | 69.7 | 58 | 279 | 99.8 | 56 | 203 |
| 2 | 69.2 | 54 | 255 | 97.4 | 60 | 239 |
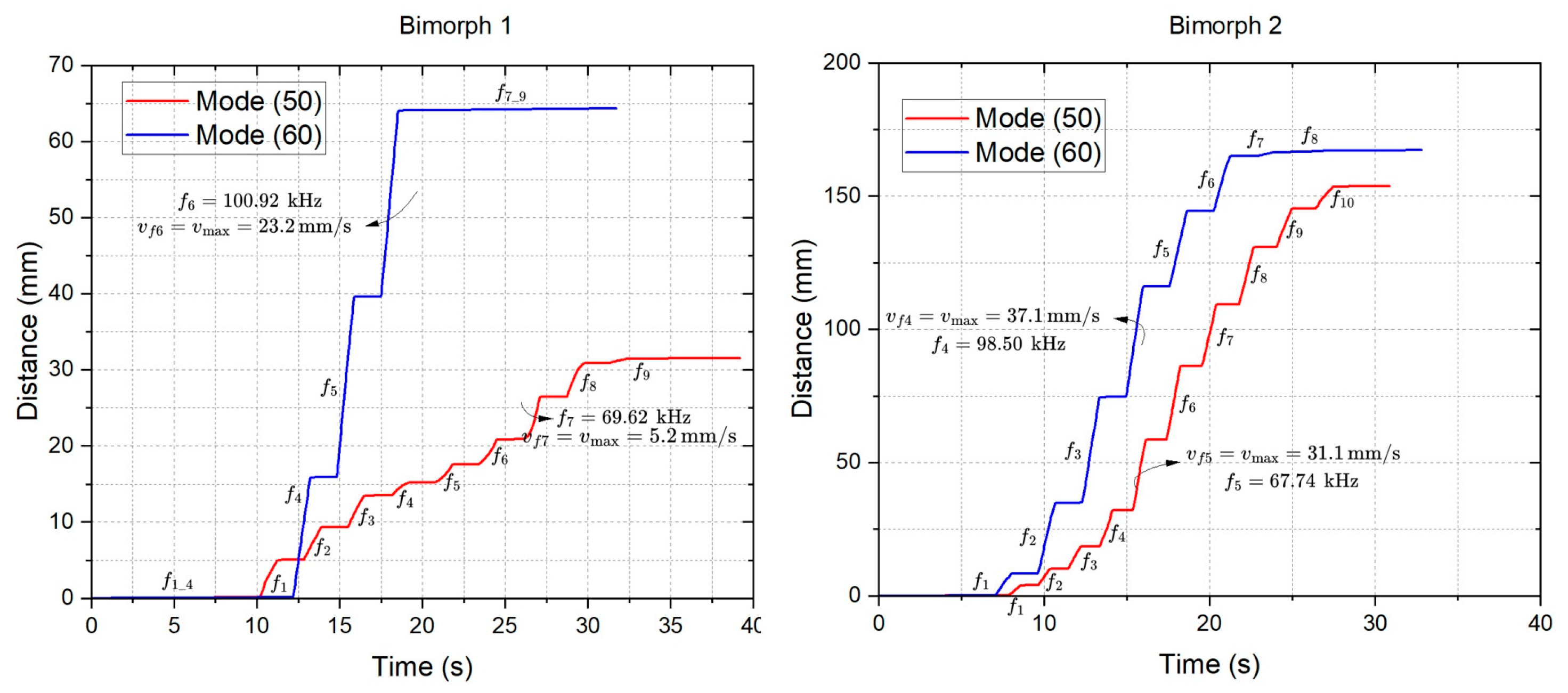
| Bimorph 1 | Bimorph 2 | ||||||
|---|---|---|---|---|---|---|---|
| Mode (50) | Mode (60) | Mode (50) | Mode (60) | ||||
| Frequency kHz | Speed mm/s | Frequency kHz | Speed mm/s | Frequency kHz | Speed mm/s | Frequency kHz | Speed mm/s |
| 69.6 | 5.2 | 100.9 | 23.2 | 67.7 | 31.1 | 98.5 | 37.1 |
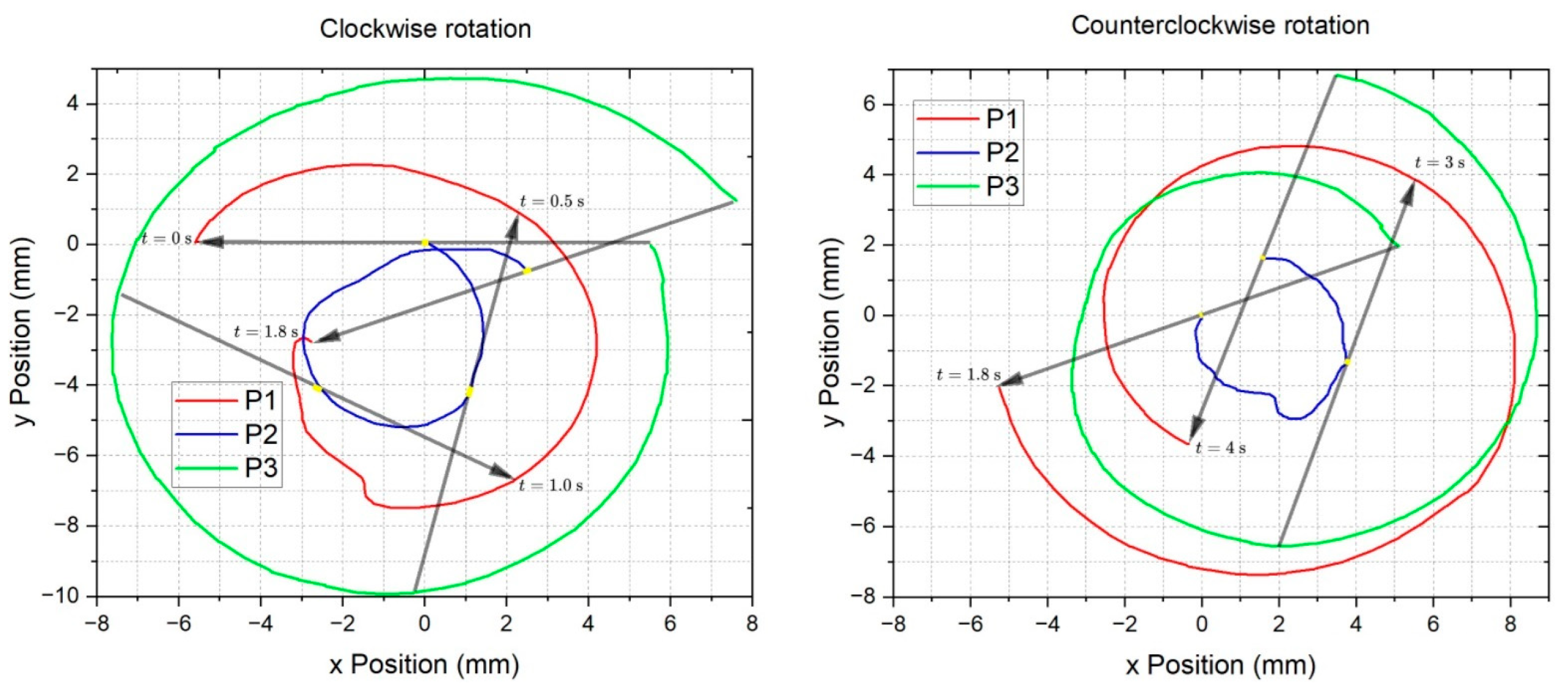
| Clockwise Rotation | Counterclockwise Rotation | |
|---|---|---|
| Angular velocity | ||
| Positional deviationper rotation | ||
| Angle |
| Forward | Backward | |
|---|---|---|
| Speed | ||
| Deviation | ||
| Distance | 67.4 mm | 74.6 mm |
| Complex L-Shaped Trajectory | |
|---|---|
| Speed | |
| Deviation | |
| Distance | 323 mm |
| Microrobot Description | Size (mm) | Total Mass (g) | Speed (BL/s) | Cost of Transport | Power Consumption (mW) | Autonomy (min) |
|---|---|---|---|---|---|---|
| This work | 17 | 7.42 | 4.1 | 10 | 50.5 | |
| BHMbot [13] | 20 | 1.76 | 17.5 | 304 | 1770 | |
| HARM-F [6] | 45 | 2.8 | 3.8 | 84 | 600 | |
| DEAnsect [11] | 40 | 1 | 0.3 | 1670 | 188 | |
| S²worm [12] | 41 | 4.34 | 6.7 | 52 | 610.5 | |
| PVDF robot [14] | 24 | 1.9 | 1.2 | 887 | 397 | |
| RoBeetle [7] | 15 | 0.088 | 0.05 | - | - | - |
| SEMR UR1 [8] | 20 | 2.2 | 2.1 | - | 638 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramírez-Palma, M.R.; Ruiz-Díez, V.; Corsino, V.; Sánchez-Rojas, J.L. Vibration Propulsion in Untethered Insect-Scale Robots with Piezoelectric Bimorphs and 3D-Printed Legs. Robotics 2024, 13, 135. https://doi.org/10.3390/robotics13090135
Ramírez-Palma MR, Ruiz-Díez V, Corsino V, Sánchez-Rojas JL. Vibration Propulsion in Untethered Insect-Scale Robots with Piezoelectric Bimorphs and 3D-Printed Legs. Robotics. 2024; 13(9):135. https://doi.org/10.3390/robotics13090135
Chicago/Turabian StyleRamírez-Palma, Mario Rodolfo, Víctor Ruiz-Díez, Víctor Corsino, and José Luis Sánchez-Rojas. 2024. "Vibration Propulsion in Untethered Insect-Scale Robots with Piezoelectric Bimorphs and 3D-Printed Legs" Robotics 13, no. 9: 135. https://doi.org/10.3390/robotics13090135
APA StyleRamírez-Palma, M. R., Ruiz-Díez, V., Corsino, V., & Sánchez-Rojas, J. L. (2024). Vibration Propulsion in Untethered Insect-Scale Robots with Piezoelectric Bimorphs and 3D-Printed Legs. Robotics, 13(9), 135. https://doi.org/10.3390/robotics13090135