

A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- 1.
- We consider differential flatness-based minimum-snap trajectory optimization with a time-allocation optimization step for obtaining the initial solution and global online fixed-time, on-demand replanning for obstacle avoidance.
- 2.
- We integrate the full-state feed-forward generated from the reference trajectory with the feedback control. This kinematics-based full-state (including attitude and torque) feedforward is generated directly from the reference minimum-snap trajectory, thus reducing the required control effort. More importantly, this feature is integrated within the PX4 Autopilot.
- 3.
- We report our test results in a high-fidelity simulation environment. The results demonstrate the ability of the proposed replanning framework to successfully avoid previously unknown obstacles by re-generating a new mission profile in an automated manner.
- 4.
- We also provide a hardware pipeline integration overview (using a modified version of the PX4 Autopilot and a Raspberry Pi5 companion computer) and algorithm implementation details. We demonstrate successful collision avoidance in hardware flight experiments using a custom-built quadrotor in our indoor flight test facility.
2. Methods
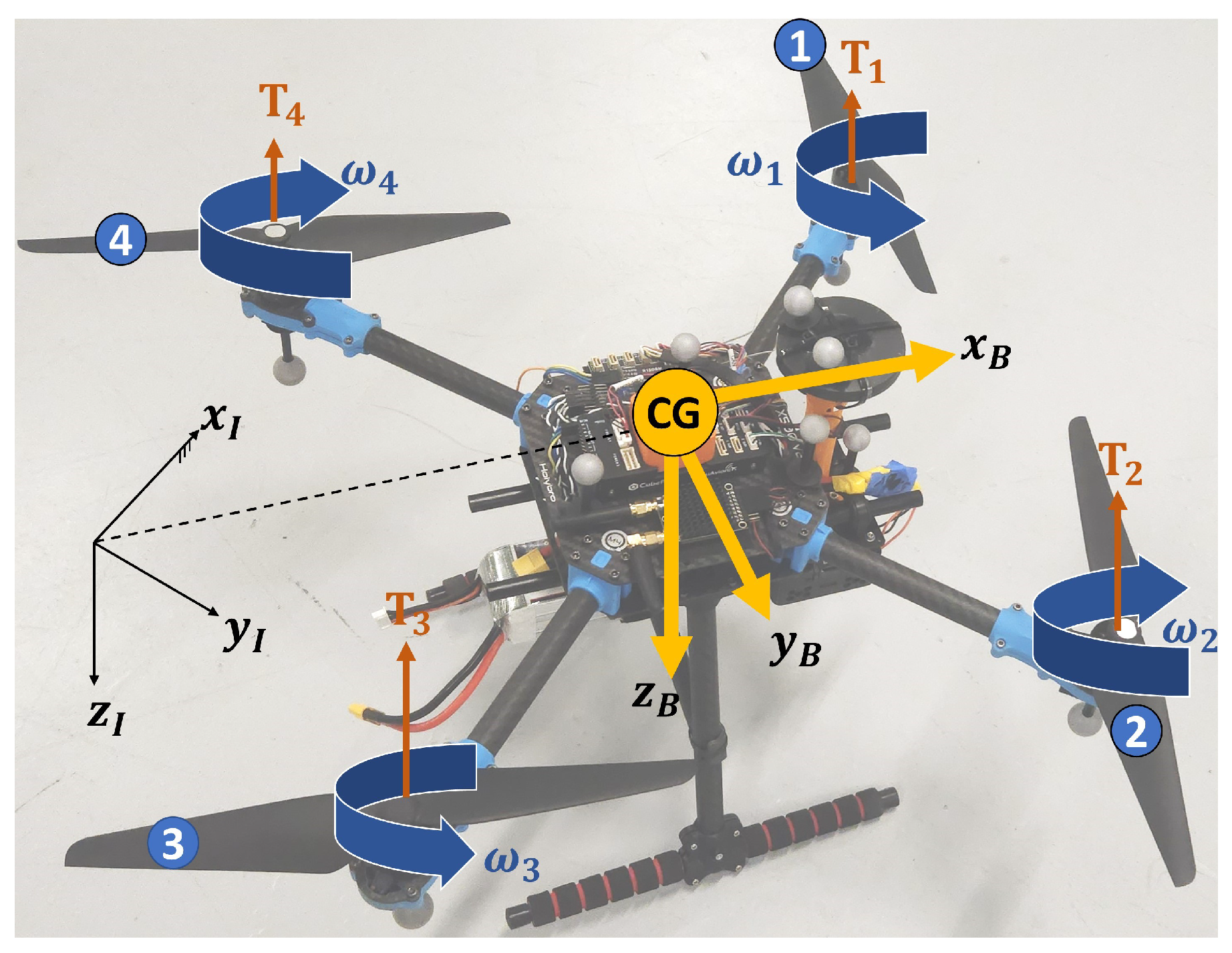
2.1. Vehicle Dynamics
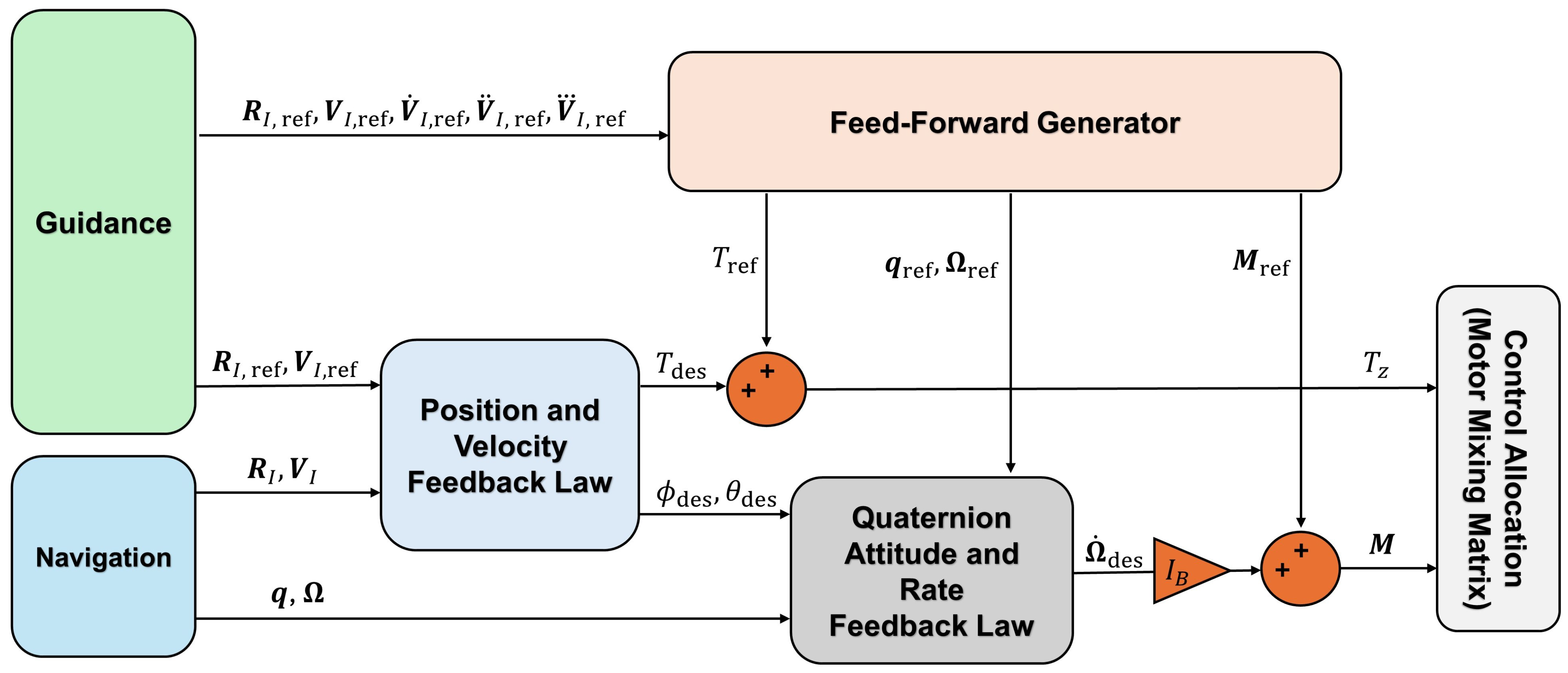
2.2. Control System Architecture
2.3. Minimum-Snap Trajectory Optimization
2.4. Online Re-Planning Strategy
- 1.
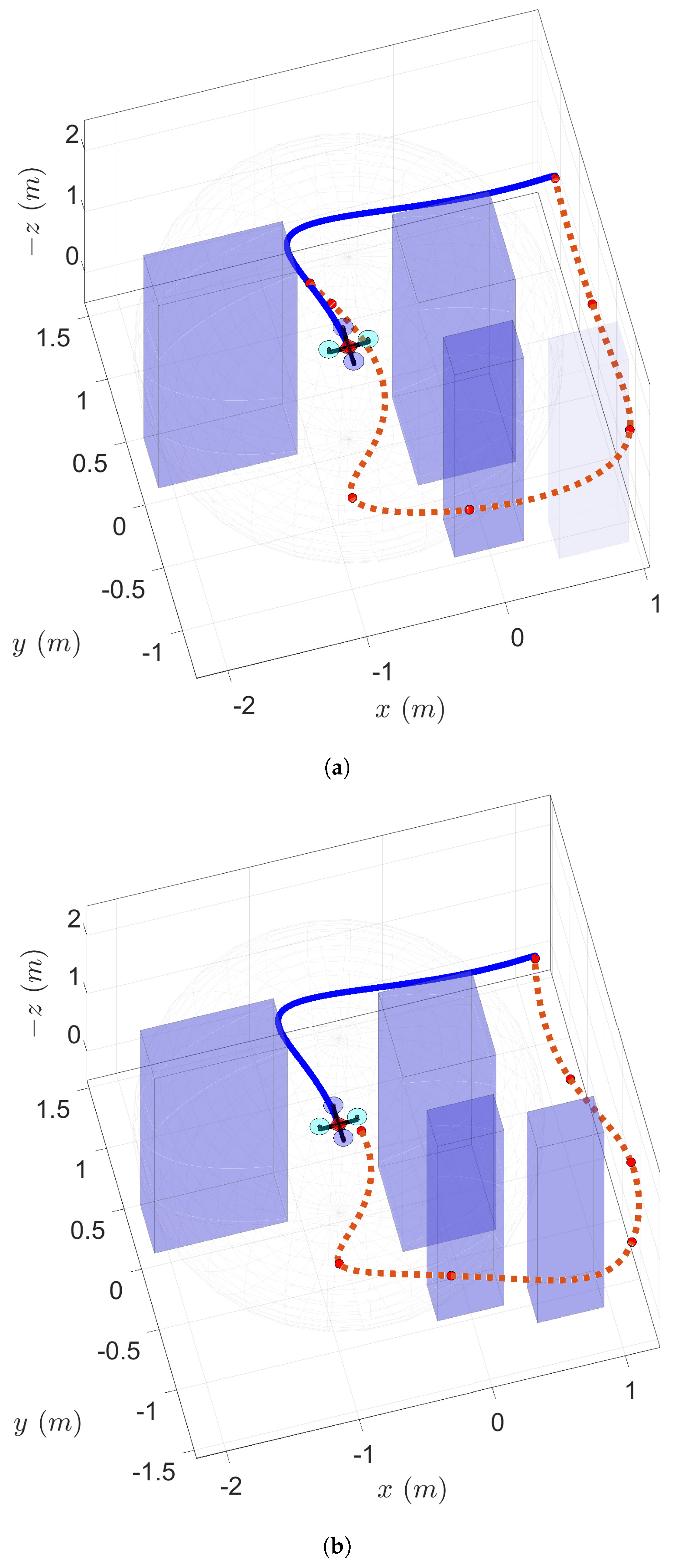
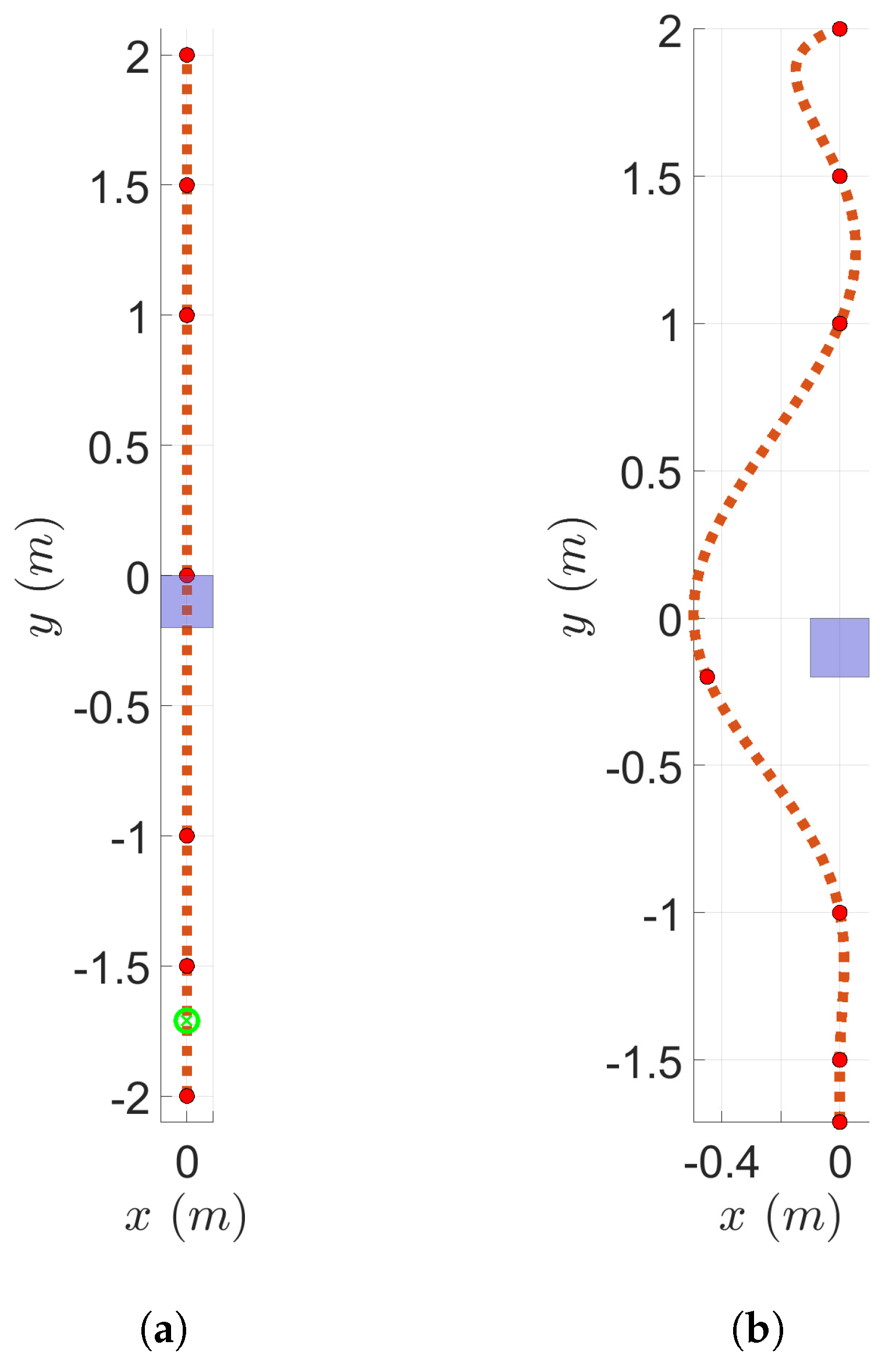
- Waypoint pruning. The latest set of waypoints is modified based on whether any of the waypoints are within an obstacle or not. In other words, the old set of waypoints may no longer be feasible and must be pruned. Since we have assumed that we know all the parameters of the obstacles once they are detected, and obstacles are assumed to be convex (rectangle), we only need to check whether each of the waypoints is inside any of the bounding boxes and mark the waypoint as infeasible. No trajectory optimization is performed at this step, and the initial set of enforced waypoints and associated segment time is reduced for future calculations.
- 2.
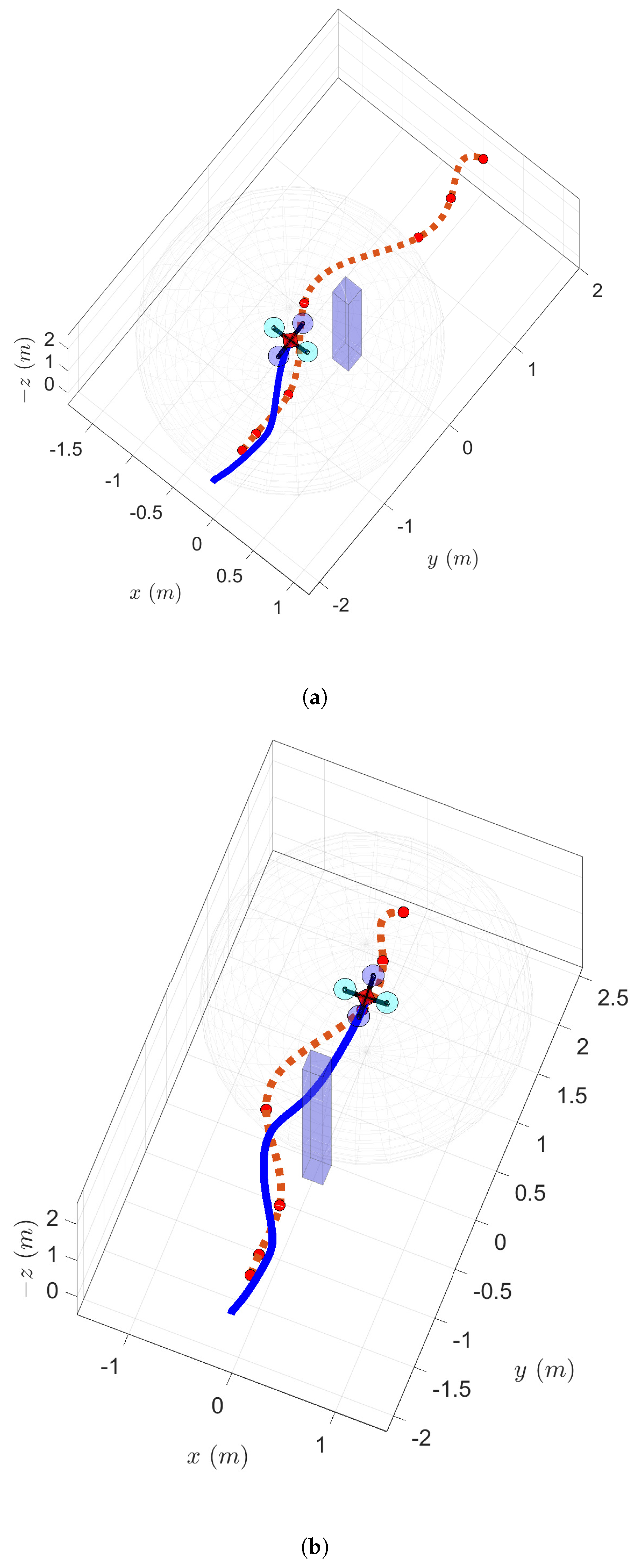
- Collision avoidance through updating/introducing waypoints. The latest set of coefficients is evaluated to obtain a discrete trajectory. The trajectory ahead is then checked for collision with all available obstacles. If a collision is detected, the discrete trajectory is used to determine the segment that lies inside the bounding box and estimate a single point outside its boundaries that will result in a collision-free minimum-snap trajectory (without computing it). This additional point is added to the latest set of (pruned) waypoints. As a result, the initial set of enforced boundary conditions (waypoints) may increase (by one).
- 3.
- Time allocation update. If any of the previous steps resulted in any modifications to the most recent set of waypoints, the time allocation vector, , must be updated accordingly. Since solving an optimal time-allocation problem is time-consuming, and we have assumed this algorithm must be executed in real-time, we have adopted velocity-based heuristics. In essence, we already keep track of the time allocation vector, , and we only need to update the modified/new segments. First, we compute the average speed with the most recent set of waypoints and time-allocation vector (from the previous iteration). We use the Euclidean distance between two consecutive waypoints (e.g., A and B), and the total time allocated for this segment is used to estimate the average speed. We also keep track of the changes made so far (during this iteration) and mark segment(s) that have been modified/introduced (e.g., by introducing point C). The time allocated for all the newly introduced segments (e.g., A to C and C to B) is estimated assuming the same average speed as for the old segment (e.g., A to B). If any of the old waypoints are removed (e.g., point A, point B, or both), the same average speed is assumed for the new segment(s).
- 4.
- Reference trajectory update. If prior steps have led to any modification to the most recent set of waypoints and time allocation vector, the fixed-time unconstrained quadratic minimum-snap optimization problem is resolved using the modified set of inputs. Although the solution is analytic, it may not be ready immediately, so it is scheduled as a separate process to be computed in parallel using a companion computer. While the new solution is being computed, the most recent (old) set of polynomial coefficients is used to provide references to the control system, and all further collision detection is paused until the new solution is ready. This logic is adopted to provide the least interruption to the trajectory execution process and to minimize computational loads. Once the new solution is ready, it replaces the most recently computed one, and the entire algorithm above is allowed to resume.
2.5. Hardware Implementation and Deployment
3. Results
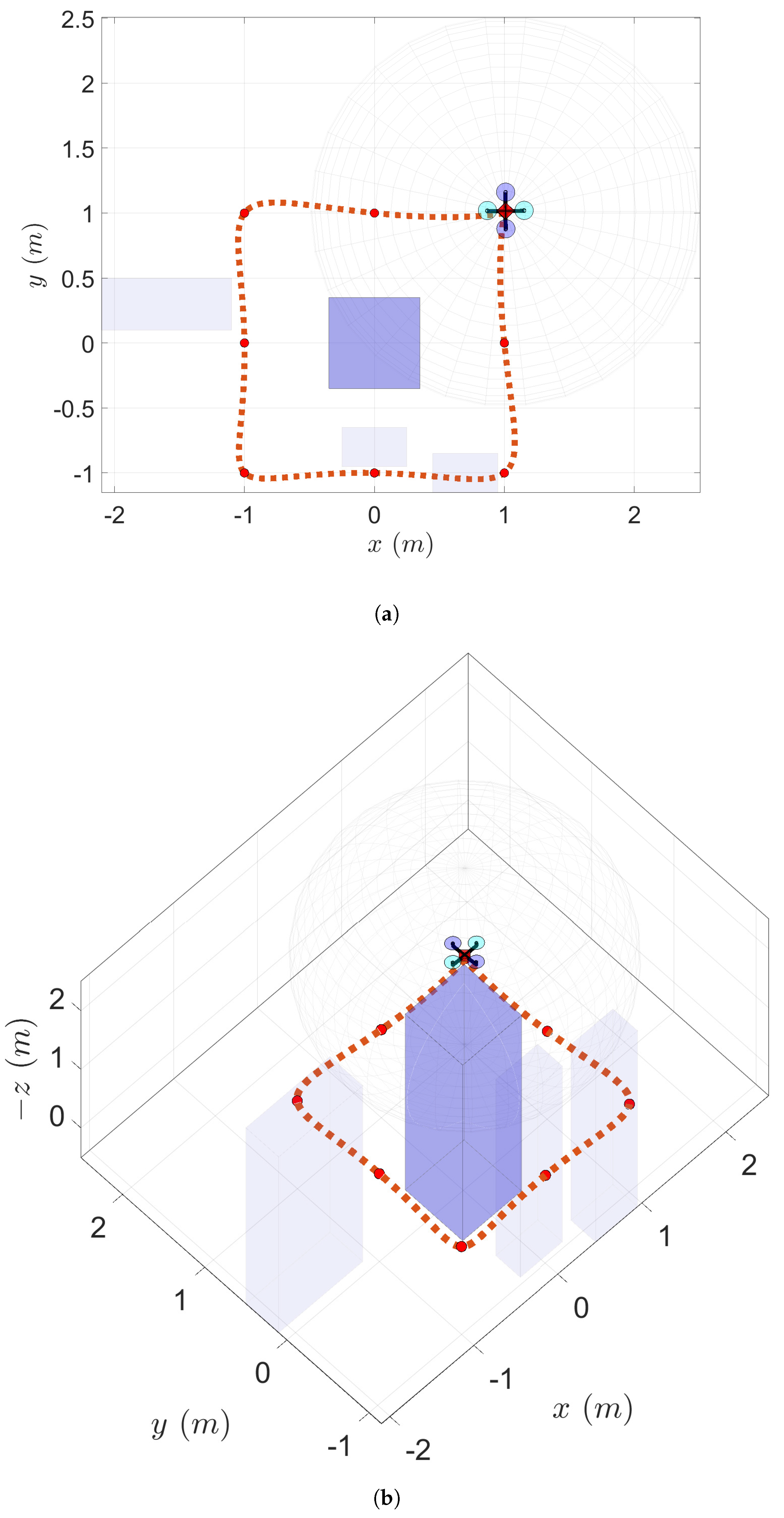
3.1. Simulation Results
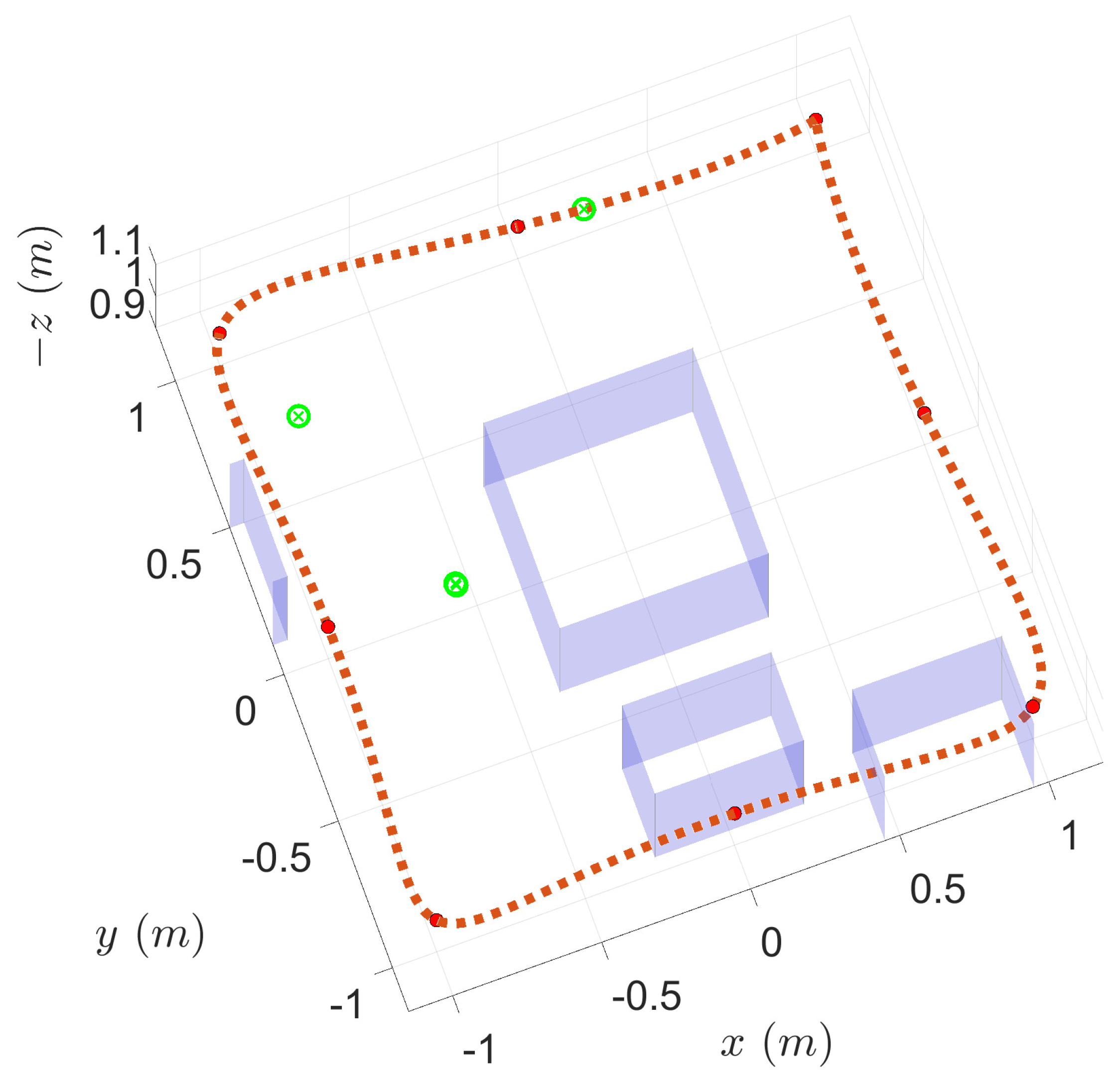
3.2. Experimental Validation/Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
- The quadrotor autopilot (control system): https://github.com/YevheniiKovryzhenko/Quadrotor_with_FF_Control.git (accessed on 3 September 2024)
- PX4 Simulink Input Output Framework: https://github.com/YevheniiKovryzhenko/PX4_SIMULINK_IO_Framework.git (accessed on 3 September 2024)
- KGroundControl ground station: https://github.com/YevheniiKovryzhenko/KGroundControl.git (accessed on 3 September 2024)
References
- Sabour, M.; Jafary, P.; Nematiyan, S. Applications and classifications of unmanned aerial vehicles: A literature review with focus on multi-rotors. Aeronaut. J. 2023, 127, 466–490. [Google Scholar] [CrossRef]
- Alsalem, A.; Zohdy, M. A Review on Civil Applications of Vertical Take-off and Landing Vehicles. In Proceedings of the 2023 IEEE Conference on Technologies for Sustainability (SusTech), Portland, OR, USA, 19–22 April 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 130–137. [Google Scholar]
- Wandelt, S.; Wang, S.; Zheng, C.; Sun, X. AERIAL: A Meta Review and Discussion of Challenges toward Unmanned Aerial Vehicle Operations in Logistics, Mobility, and Monitoring. IEEE Trans. Intell. Transp. Syst. 2023, 25, 6276–6289. [Google Scholar] [CrossRef]
- Malyuta, D.; Reynolds, T.P.; Szmuk, M.; Lew, T.; Bonalli, R.; Pavone, M.; Açıkmeşe, B. Convex optimization for trajectory generation: A tutorial on generating dynamically feasible trajectories reliably and efficiently. IEEE Control Syst. Mag. 2022, 42, 40–113. [Google Scholar] [CrossRef]
- Marshall, J.A.; Sun, W.; L’Afflitto, A. A survey of guidance, navigation, and control systems for autonomous multi-rotor small unmanned aerial systems. Annu. Rev. Control 2021, 52, 390–427. [Google Scholar] [CrossRef]
- Jiang, H.; Chen, K.; Chai, R.; Yu, J.; Guo, C.; Xia, Y. Trajectory Planning and Control of Multiple Quadcopters for Mars Exploration. J. Aerosp. Eng. 2024, 37, 04024038. [Google Scholar] [CrossRef]
- Kamyar, R.; Taheri, E. Aircraft optimal terrain/threat-based trajectory planning and control. J. Guid. Control Dyn. 2014, 37, 466–483. [Google Scholar] [CrossRef]
- Cao, P.; Hwang, J.T.; Bewley, T.; Kuester, F. Mission-Oriented Trajectory Optimization for Search-and-Rescue Multirotor UAVs in Cluttered and GPS-Denied Environments. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3999. [Google Scholar]
- Davoudi, B.; Taheri, E.; Duraisamy, K.; Jayaraman, B.; Kolmanovsky, I. Quad-rotor flight simulation in realistic atmospheric conditions. AIAA J. 2020, 58, 1992–2004. [Google Scholar] [CrossRef]
- Wang, Z. A survey on convex optimization for guidance and control of vehicular systems. Annu. Rev. Control 2024, 57, 100957. [Google Scholar] [CrossRef]
- Wang, Z.; Ye, H.; Xu, C.; Gao, F. Generating Large-Scale Trajectories Efficiently using Double Descriptions of Polynomials. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 7436–7442. [Google Scholar] [CrossRef]
- Oleynikova, H.; Burri, M.; Taylor, Z.; Nieto, J.; Siegwart, R.; Galceran, E. Continuous-time trajectory optimization for online UAV replanning. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 5332–5339. [Google Scholar] [CrossRef]
- Harun, M.H.; Abdullah, S.S.; Aras, M.S.M.; Bahar, M.B.; Ali@Ibrahim, F. Recent Developments and Future Prospects in Collision Avoidance Control for Unmanned Aerial Vehicles (UAVS): A Review. Int. J. Robot. Control Syst. 2024, 4, 1207–1242. [Google Scholar]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision avoidance of multi unmanned aerial vehicles: A review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Szmuk, M.; Pascucci, C.A.; Dueri, D.; Açikmeşe, B. Convexification and real-time on-board optimization for agile quad-rotor maneuvering and obstacle avoidance. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 4862–4868. [Google Scholar]
- Wu, Y.; Deniz, S.; Shi, Y.; Wang, Z. A convex optimization approach to real-time merging control of evtol vehicles for future urban air mobility. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 3319. [Google Scholar]
- Manyam, S.G.; Casbeer, D.W.; Darbha, S.; Weintraub, I.E.; Kalyanam, K. Path planning and energy management of hybrid air vehicles for urban air mobility. IEEE Robot. Autom. Lett. 2022, 7, 10176–10183. [Google Scholar] [CrossRef]
- Causa, F.; Franzone, A.; Fasano, G. Strategic and tactical path planning for urban air mobility: Overview and application to real-world use cases. Drones 2022, 7, 11. [Google Scholar] [CrossRef]
- Zimmermann, M.; Vu, M.N.; Beck, F.; Nguyen, A.; Kugi, A. Two-Step Online Trajectory Planning of a Quadcopter in Indoor Environments with Obstacles. arXiv 2023, arXiv:2211.06377. [Google Scholar] [CrossRef]
- Romero, A.; Penicka, R.; Scaramuzza, D. Time-Optimal Online Replanning for Agile Quadrotor Flight. IEEE Robot. Autom. Lett. 2022, 7, 7730–7737. [Google Scholar] [CrossRef]
- Andersson, O.; Ljungqvist, O.; Tiger, M.; Axehill, D.; Heintz, F. Receding-Horizon Lattice-Based Motion Planning with Dynamic Obstacle Avoidance. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 4467–4474. [Google Scholar] [CrossRef]
- Lee, H.; Seo, H.; Kim, H.G. Trajectory Optimization and Replanning Framework for a Micro Air Vehicle in Cluttered Environments. IEEE Access 2020, 8, 135406–135415. [Google Scholar] [CrossRef]
- Park, J.K.; Chung, T.M. Boundary-RRT* Algorithm for Drone Collision Avoidance and Interleaved Path Re-Planning. J. Inf. Process. Syst. 2020, 16, 1324–1342. [Google Scholar] [CrossRef]
- Zipfel, P.H. Modeling and Simulation of Aerospace Vehicle Dynamics; AIAA: Reston, VA, USA, 2000. [Google Scholar]
- Yeager, J.C. Implementation and Testing of Turbulence Models for the F18-HARV Simulation; NASA: Washington, DC, USA, 1998. [Google Scholar]
- Kovryzhenko, Y. Application of the Finite Fourier Series for Smooth Motion Planning of Quadrotors. Master’s Thesis, Auburn University, Auburn, AL, USA, 2023. Available online: https://etd.auburn.edu//handle/10415/8797 (accessed on 3 September 2024).
- Fresk, E.; Nikolakopoulos, G. Full quaternion based attitude control for a quadrotor. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 3864–3869. [Google Scholar] [CrossRef]
- Faessler, M.; Franchi, A.; Scaramuzza, D. Differential Flatness of Quadrotor Dynamics Subject to Rotor Drag for Accurate Tracking of High-Speed Trajectories. IEEE Robot. Autom. Lett. 2018, 3, 620–626. [Google Scholar] [CrossRef]
- Kovryzhenko, Y.; Taheri, E. Comparison of minimum-snap and finite fourier series methods for multi-copter motion planning. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Wu, S.; Li, R.; Shi, Y.; Liu, Q. Vision-based target detection and tracking system for a quadcopter. IEEE Access 2021, 9, 62043–62054. [Google Scholar] [CrossRef]
- Almeida, M.M.D.; Moghe, R.; Akella, M. Real-Time Minimum Snap Trajectory Generation for Quadcopters: Algorithm Speed-up Through Machine Learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 683–689. [Google Scholar] [CrossRef]
- Park, Y.; Kim, W.; Moon, H. Time-Continuous Real-Time Trajectory Generation for Safe Autonomous Flight of a Quadrotor in Unknown Environment. Appl. Sci. 2021, 11, 3238. [Google Scholar] [CrossRef]
- Richter, C.; Bry, A.; Roy, N. Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments. Robot. Res. 2016, 114, 649–666. [Google Scholar] [CrossRef]
- Koubaa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro Air Vehicle Link (MAVlink) in a Nutshell: A Survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar] [CrossRef]
- Comer, A.; Chakraborty, I.; Kovryzhenko, Y.; Taheri, E.; Bhandari, R.; Kunwar, B.; Putra, S. Flight Testing of Explicit Model-Following Trajectory Control System for Lift-Plus-Cruise and Tilt-Wing Configurations. In Proceedings of the VFS 80 Forum, Montreal, QC, Canada, 7–9 May 2024. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovryzhenko, Y.; Li, N.; Taheri, E. A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability. Robotics 2024, 13, 136. https://doi.org/10.3390/robotics13090136
Kovryzhenko Y, Li N, Taheri E. A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability. Robotics. 2024; 13(9):136. https://doi.org/10.3390/robotics13090136
Chicago/Turabian StyleKovryzhenko, Yevhenii, Nan Li, and Ehsan Taheri. 2024. "A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability" Robotics 13, no. 9: 136. https://doi.org/10.3390/robotics13090136
APA StyleKovryzhenko, Y., Li, N., & Taheri, E. (2024). A Control System Design and Implementation for Autonomous Quadrotors with Real-Time Re-Planning Capability. Robotics, 13(9), 136. https://doi.org/10.3390/robotics13090136