
A Passivity-Based Framework for Safe Physical Human–Robot Interaction



Abstract
1. Introduction
2. Problem Statement
3. Modeling
3.1. Manipulator Model
- Property 1
- All kinematic singularities are always avoided and the pseudoinverse of the manipulator Jacobian, denoted by , is assumed to always exist.
- Property 2
- Property 3
- The inverse of the inertia matrix is assumed to be bounded by a known positive constant as , where denotes a known positive bounding constant [23].
- Property 4
- Based on Properties 2 and 3, the lumped model uncertainty term D defined above in (10) can be upper bounded by a function of the joint velocity as follows:where , and denote known positive bounding constants.
3.2. Environment Model
4. Control Design and Stability Analysis: Non-Dissipative Environment
4.1. Control Design
4.1.1. Design of the Inner Loop
4.1.2. Design of the Desired Dynamics
4.2. Stability Analysis
4.3. Simulation Results
5. Control Design and Stability Analysis for Dissipative Environment
5.1. Control Design
5.2. Stability Analysis
5.3. Simulation Results
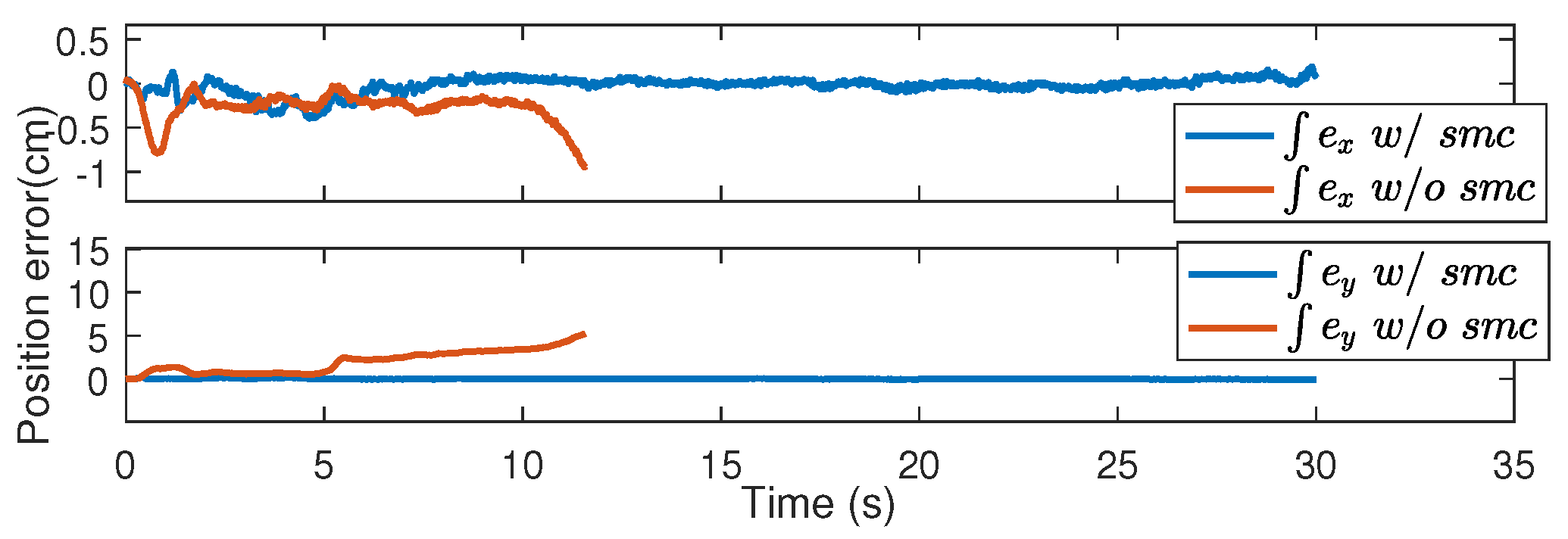
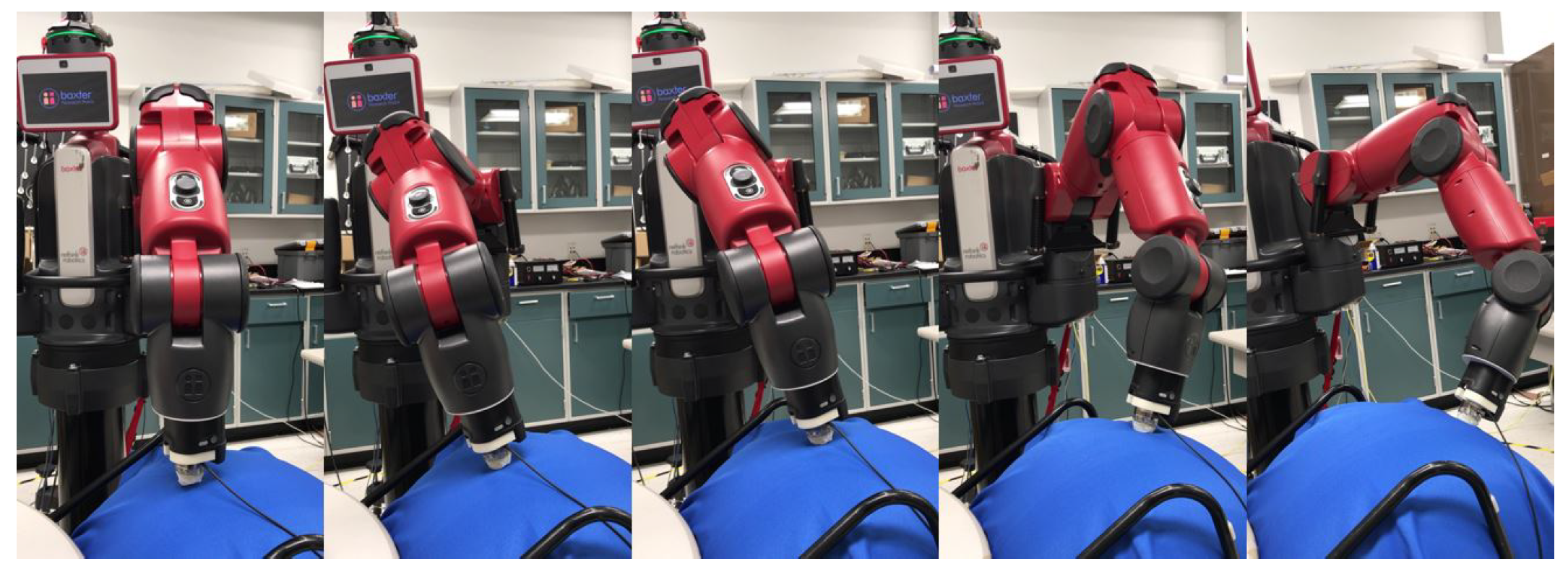
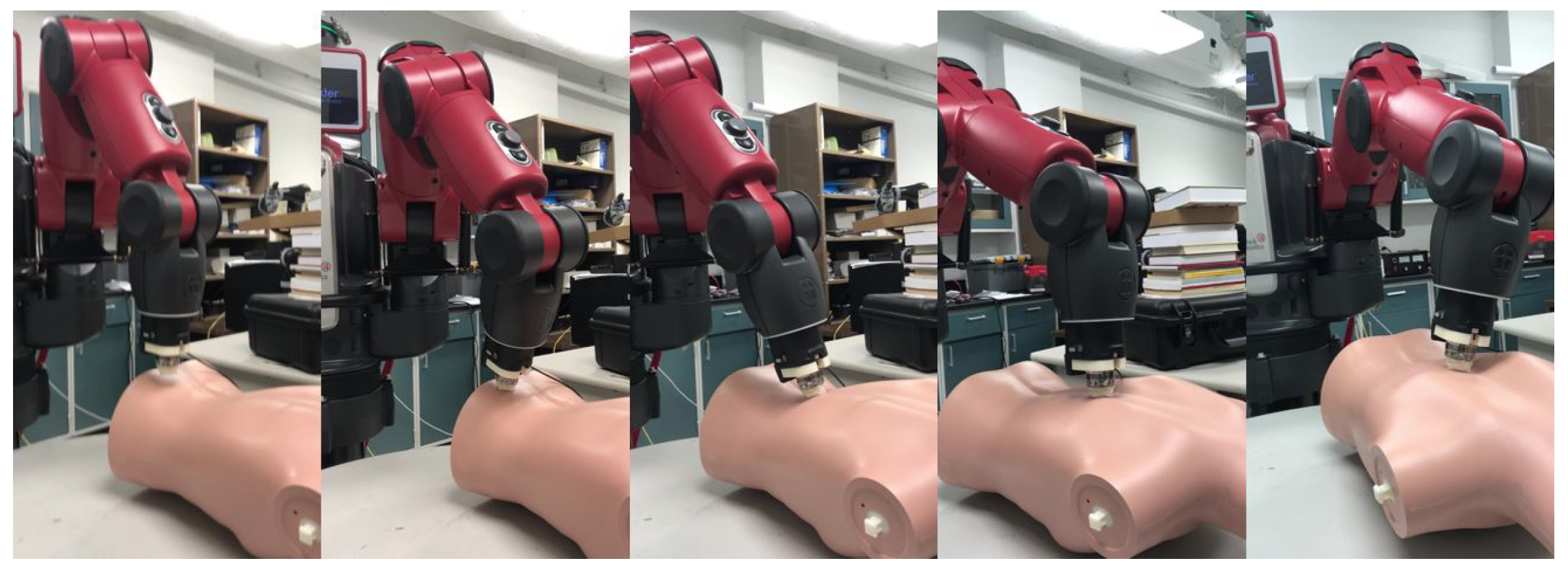
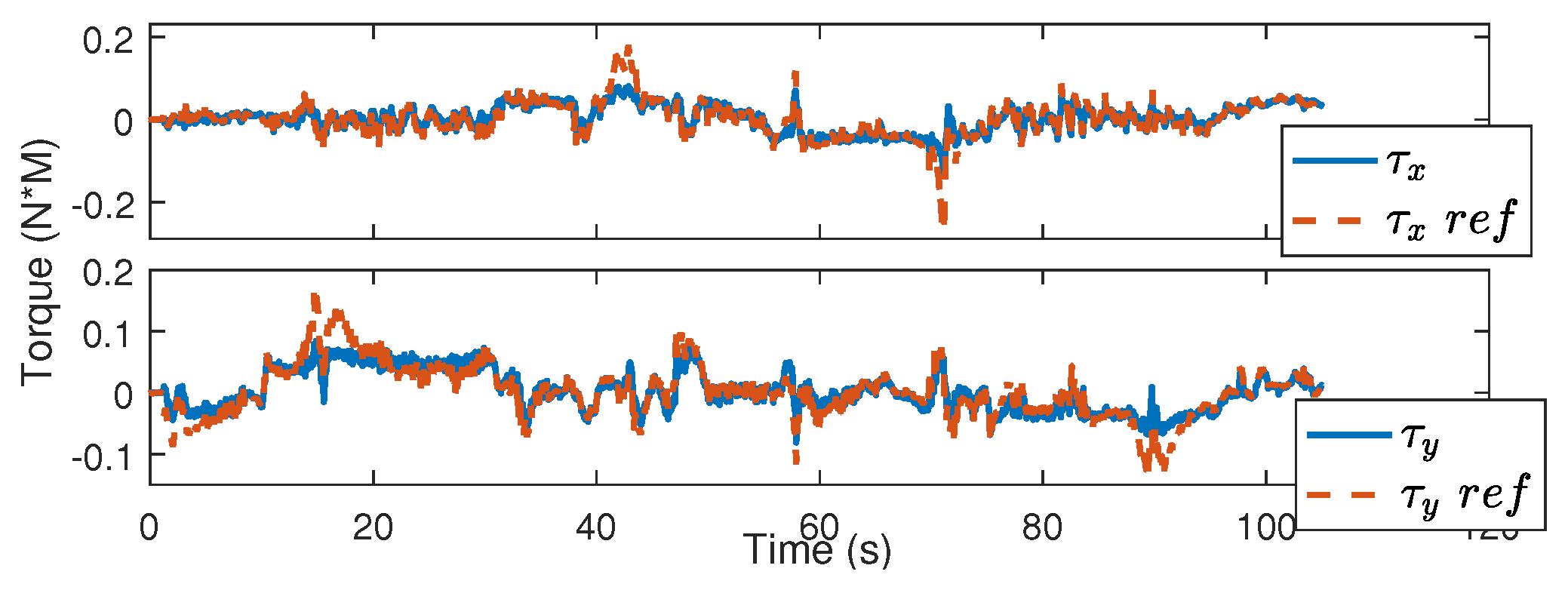
6. Experiment
6.1. Implementation
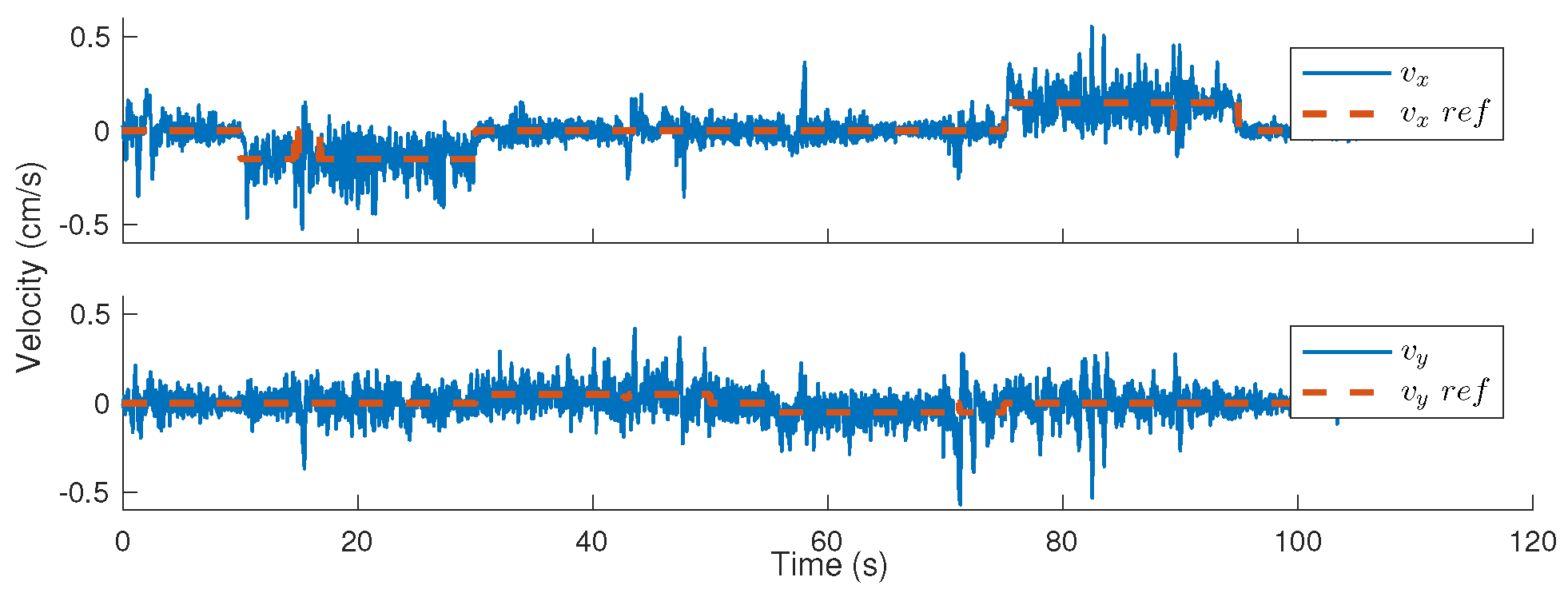
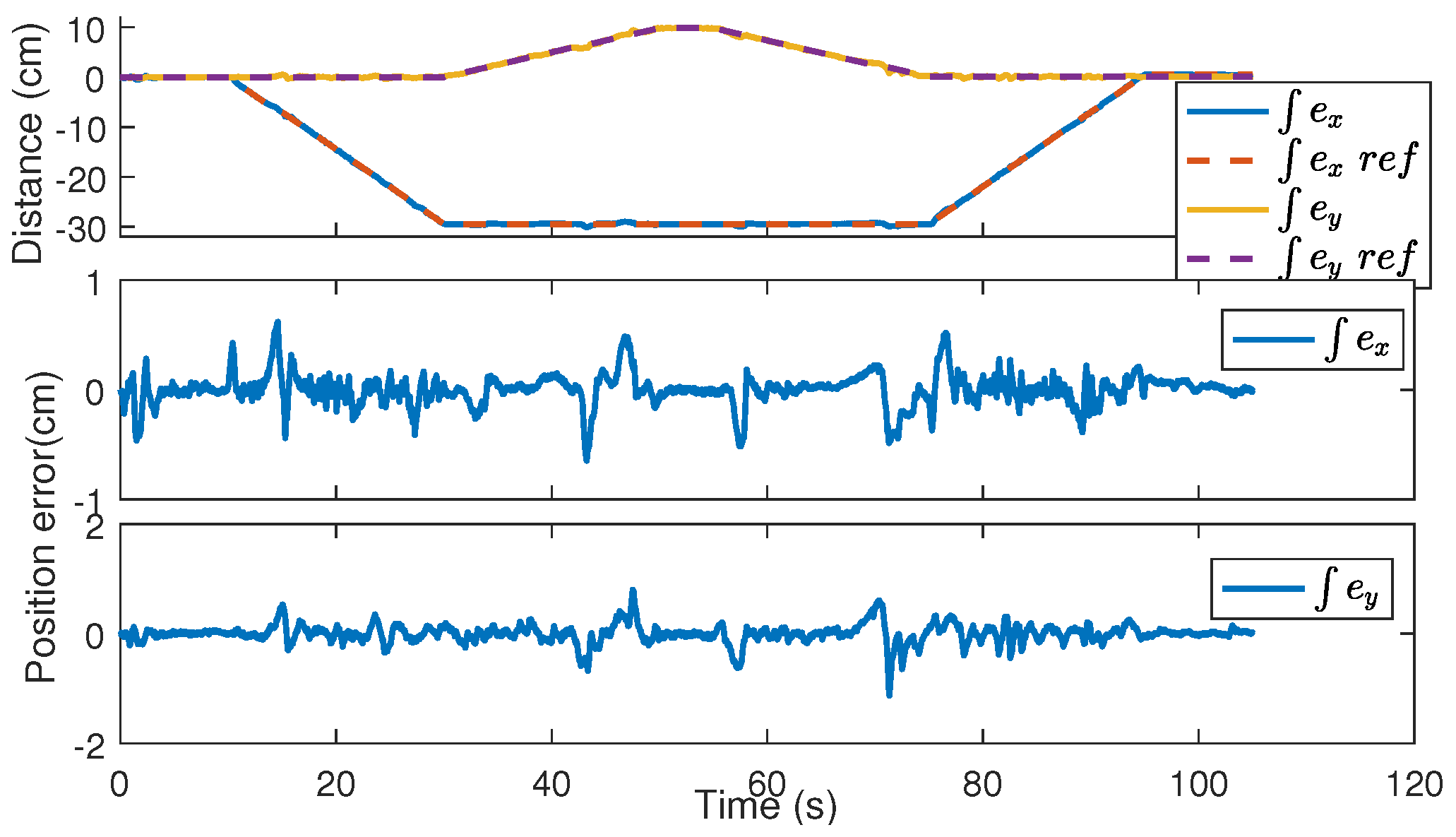
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Definition and Growth Bound of G1(t)
Appendix A.2. Definitions of A, P and Q
Appendix A.3. Definition and Linear Growth Bound of G2(t)
Appendix A.4. Bound for
Appendix A.5. Exponential Convergence of to Implies Exponential Convergence of θc to θd
References
- Engelberger, J. Robotics in Service; The MIT Press: Cambridge, MA, USA, 1989. [Google Scholar]
- Kwee, H.H.; Duimel, J.J.; Smits, J.J.; Tuinhof de Moed, A.A.; van Woerden, J.A. The MANUS Wheelchair-Borne Manipulator: System Review and First Results. In Proceedings of the IARP Workshop on Domestic and Medical & Healthcare Robotics, Newcastle, UK, 1989; pp. 385–395. [Google Scholar]
- Van der Loos, M.; Michalowski, S.; Leifer, L. Design of an Omnidirectional Mobile Robot as a Manipulation Aid for the Severely Disabled. In Interactive Robotic Aids, World Rehabilitation Fund Monograph #37; Foulds, R., Ed.; World Rehabilitation Fund: New York, NY, USA, 1986. [Google Scholar]
- Mahoney, R.M. The Raptor Wheelchair Robot System. In Integration of Assistive Technology in the Information Age; Mokhtari, M., Ed.; IOS: Amsterdam, The Netherlands, 2001; pp. 135–141. [Google Scholar]
- Prior, S.D. An electric wheelchair mounted robotic arm—A survey of potential users. J. Med. Eng. Technol. 1990, 14, 143–154. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.; Anderson, C.; Trevor, A.; Jain, A.; Xu, Z.; Kemp, C. El-E: An Assistive Robot that Fetches Objects from Flat Surfaces. In Proceedings of the Human-Robot Interaction 2008 Workshop on Robotic Helpers, Amsterdam, The Netherlands, 12 March 2008. [Google Scholar]
- Bien, Z.; Kim, D.-J.; Chung, M.J.; Kwon, D.S.; Chang, P.H. Development of a Wheelchair-Based Rehabilitation Robotic System (KARES II) with Various Human Robot Interaction Interfaces for the Disabled. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kobe, Japan, 20–24 July 2003; pp. 902–907. [Google Scholar]
- Neveryd, H.; Bolmsj, G. WALKY, an Ultrasonic Navigating Mobile Robot for the Disabled. In Proceedings of the TIDE, Paris, France, 26–28 April 1995; pp. 366–370. [Google Scholar]
- Dario, P.; Guglielmelli, E.; Laschi, C.; Teti, G. Movaid: A Mobile Robotic System Residential Care to Disabled and Elderly People. In Proceedings of the First MobiNet Symposium, Athens, Greece, 1997; pp. 9–14. [Google Scholar]
- Bischoff, R. Design, Concept, and Realization of the Humanoid Service Robot HERMES. In Field and Service Robotics; Zelinsky, A., Ed.; Springer: London, UK, 1998; pp. 485–492. [Google Scholar]
- Ding, Z.; Paperno, N.; Prakash, K.; Behal, A. An Adaptive Control-Based Approach for 1-Click Gripping of Novel Objects Using a Robotic Manipulator. IEEE Trans. Control Syst. Technol. 2019, 27, 1805–1812. [Google Scholar] [CrossRef]
- Al-Mohammed, M.; Adem, R.; Behal, A. A Switched Adaptive Controller for Robotic Gripping of Novel Objects With Minimal Force. IEEE Trans. Control Syst. Technol. 2023, 31, 17–26. [Google Scholar] [CrossRef]
- Kim, D.; Wang, Z.; Behal, A. Motion Segmentation and Control Design for UCF-MANUS—An Intelligent Assistive Robotic Manipulator. IEEE/ASME Trans. Mechatron. 2012, 17, 936–948. [Google Scholar] [CrossRef]
- Nagata, F.; Hase, T.; Haga, Z.; Omoto, M.; Watanabe, K. CAD/CAMbased Position/Force Controller for a Mold Polishing Robot. Mechatronics 2007, 17, 207–216. [Google Scholar] [CrossRef]
- King, C.; Chen, T.L.; Jain, A.; Kemp, C.C. Towards an assistive robot that autonomously performs bed baths for patient hygiene. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 319–324. [Google Scholar]
- Hawkins, K.P.; King, C.H.; Chen, T.L.; Kemp, C. Informing assistive robots with models of contact forces from able-bodied face wiping and shaving. In Proceedings of the RO-MAN, Paris, France, 9–13 September 2012; pp. 251–258. [Google Scholar]
- Jamisola, R.S.; Kormushev, P.; Bicchi, A.; Caldwell, D.G. Haptic exploration of unknown surfaces with discontinuities. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 1255–1260. [Google Scholar]
- Gracia, L.; Solanes, J.E.; Muz-Benavent, P.; Miro, J.V.; Perez-Vidal, C.; Tornero, J. Adaptive Sliding Mode Control for Robotic Surface Treatment Using Force Feedback. Mechatronics 2018, 52, 102–118. [Google Scholar] [CrossRef]
- Roveda, L.; Vicentini, F.; Tosatti, L.M. Deformation-tracking impedance control in interaction with uncertain environments. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1992–1997. [Google Scholar]
- Moura, J.; Mccoll, W.; Taykaldiranian, G.; Tomiyama, T.; Erden, M.S. Automation of Train Cab Front Cleaning With a Robot Manipulator. IEEE Robot. Autom. 2018, 3, 3058–3065. [Google Scholar] [CrossRef]
- Ding, Z. Robust Impedance Control Design of a Robot Manipulator for Passive Physical Human-Robot Interaction. Available online: https://youtu.be/IAccCLQKWuY (accessed on 12 August 2023).
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Behal, A.; Dixon, W.E.; Dawson, D.M.; Xian, B. Lyapunov-Based Control of Robotic Systems; CRC Press: Boca Raton, FL, USA, 2009; ISBN 0-8493-7025-6. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Tayebi, A.; McGilvray, S. Attitude stabilization of a VTOL quadrotor aircraft. IEEE Trans. Control Syst. Technol. 2006, 14, 562–571. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Z.; Baghbahari, M.; Behal, A. A Passivity-Based Framework for Safe Physical Human–Robot Interaction. Robotics 2023, 12, 116. https://doi.org/10.3390/robotics12040116
Ding Z, Baghbahari M, Behal A. A Passivity-Based Framework for Safe Physical Human–Robot Interaction. Robotics. 2023; 12(4):116. https://doi.org/10.3390/robotics12040116
Chicago/Turabian StyleDing, Zhangchi, Masoud Baghbahari, and Aman Behal. 2023. "A Passivity-Based Framework for Safe Physical Human–Robot Interaction" Robotics 12, no. 4: 116. https://doi.org/10.3390/robotics12040116
APA StyleDing, Z., Baghbahari, M., & Behal, A. (2023). A Passivity-Based Framework for Safe Physical Human–Robot Interaction. Robotics, 12(4), 116. https://doi.org/10.3390/robotics12040116