
Robotic Writing of Arbitrary Unicode Characters Using Paintbrushes


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Work
3. Methods
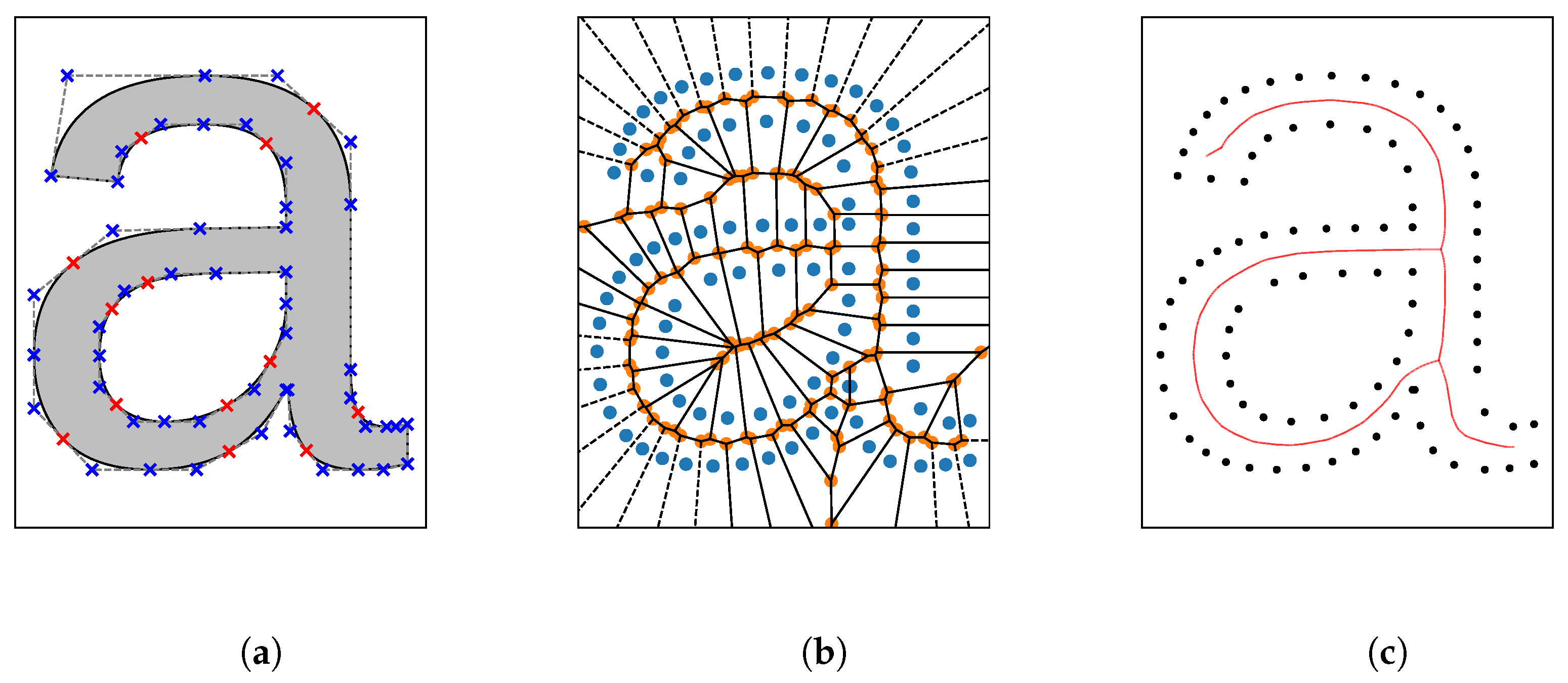
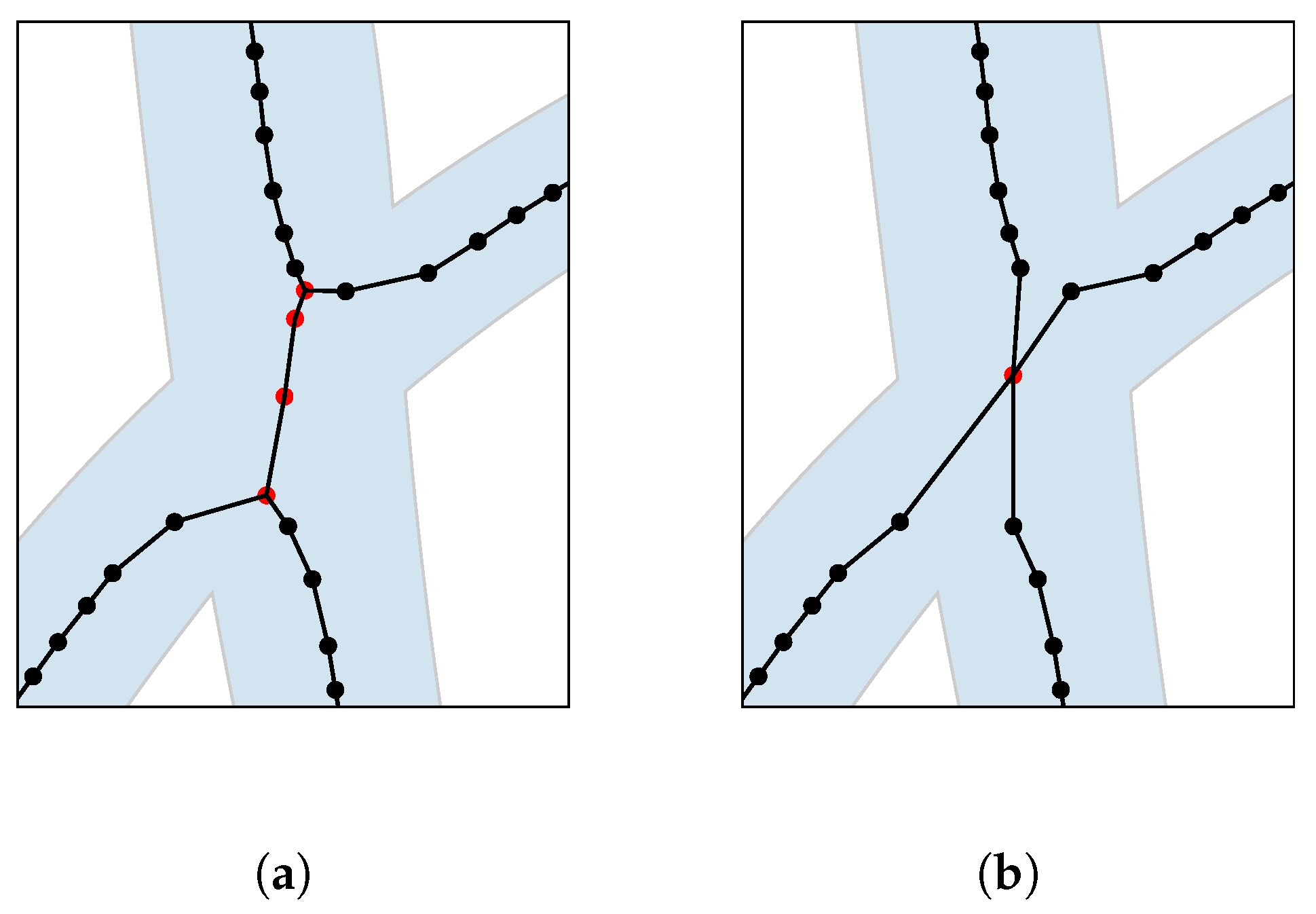
3.1. Glyph Skeleton Extraction
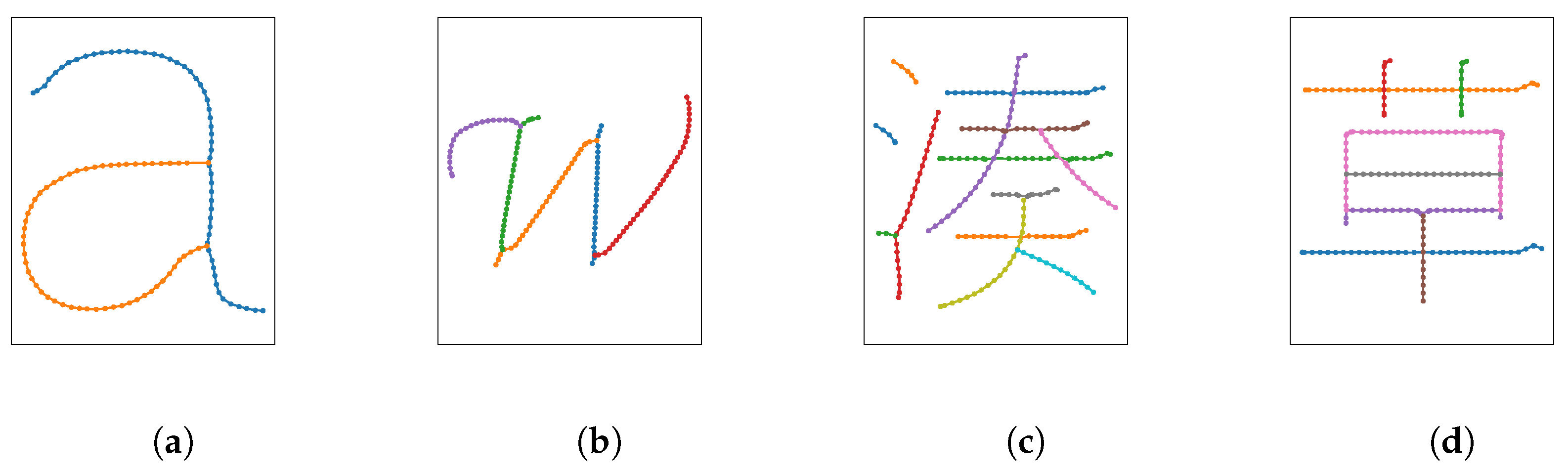
3.2. Stroke Computation
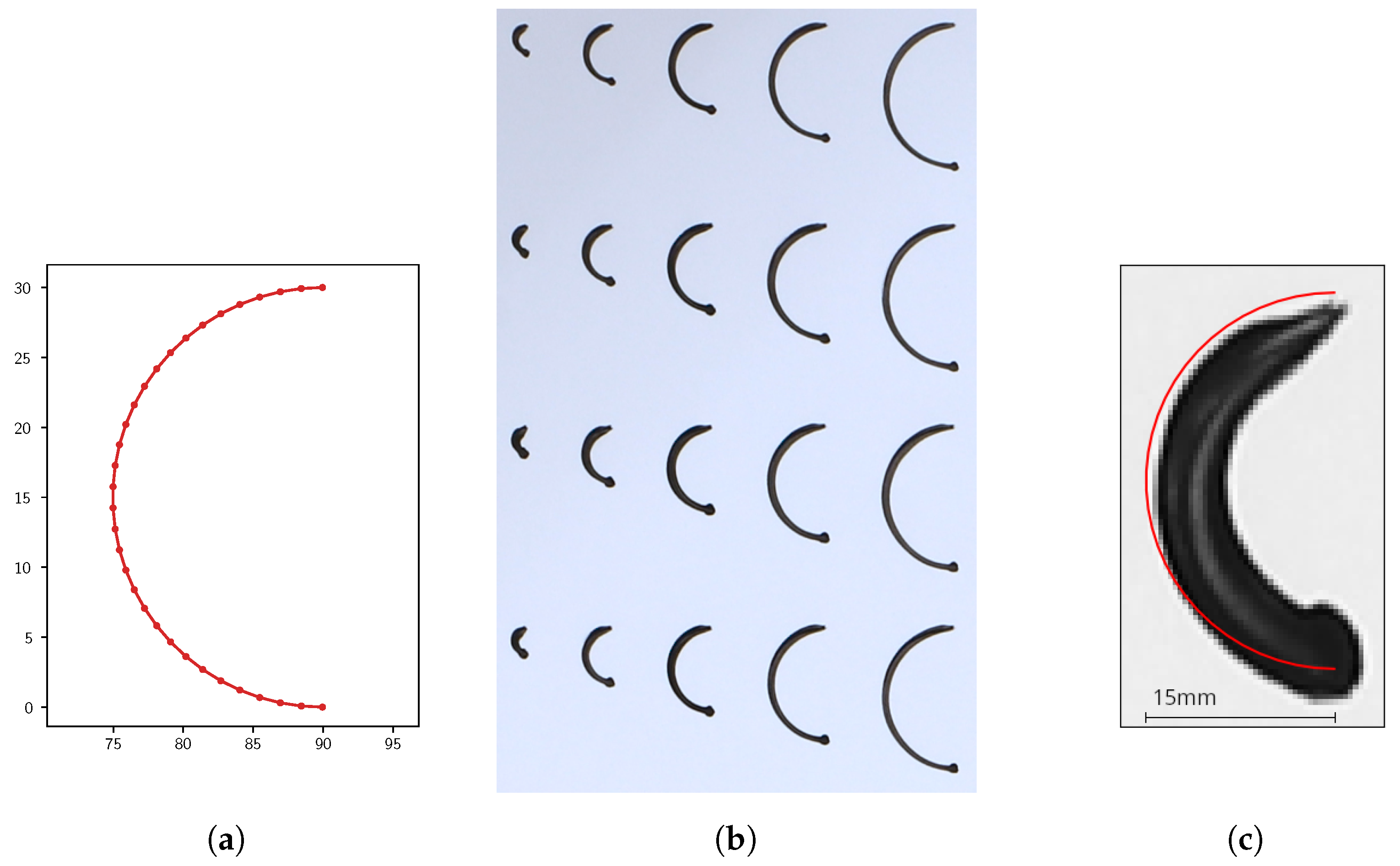
3.3. Brush Trajectory Generation
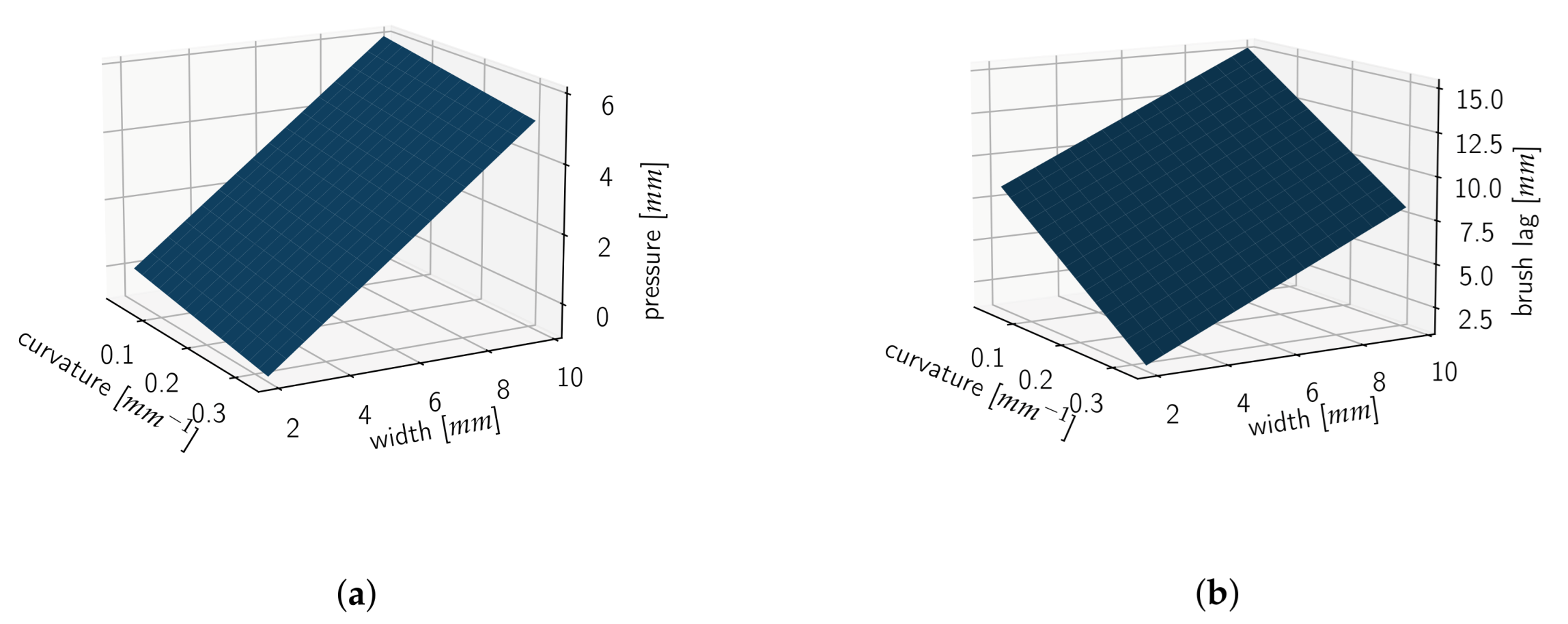
3.3.1. Brush Behavior Modeling
3.3.2. Brush Approach Correction
4. Results
5. Future Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lloyd-Davies, V. Sumi-e Painting; Walter Foster Publishing: Mission Viejo, CA, USA, 2019. [Google Scholar]
- Gülzow, J.M.; Paetzold, P.; Deussen, O. Recent Developments Regarding Painting Robots for Research in Automatic Painting, Artificial Creativity, and Machine Learning. Appl. Sci. 2020, 10, 3396. [Google Scholar] [CrossRef]
- Gülzow, J.M.; Grayver, L.; Deussen, O. Self-Improving Robotic Brushstroke Replication. Arts 2018, 7, 84. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, Y. A calligraphy robot—Callibot: Design, analysis and applications. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 185–190. [Google Scholar] [CrossRef]
- Deussen, O.; Lindemeier, T.; Pirk, S.; Tautzenberger, M. Feedback-guided stroke placement for a painting machine. In Proceedings of the Eighth Annual Symposium on Computational Aesthetics in Graphics, Visualization, and Imaging, Aire-la-Ville, Switzerland, 4–6 June 2012; pp. 25–33. [Google Scholar] [CrossRef]
- Gülzow, J.M.; Deussen, O. Region-Based Approaches in Robotic Painting. Arts 2022, 11, 77. [Google Scholar] [CrossRef]
- Wright, T. History and technology of computer fonts. IEEE Ann. Hist. Comput. 1998, 20, 30–34. [Google Scholar] [CrossRef]
- Knuth, D.E. METAFONT: A System for Alphabet Design; Technical Report; Stanford University Ca Department of Computer Science: Stanford, CA, USA, 1979. [Google Scholar]
- Ogniewicz, R.L.; Ilg, M. Voronoi skeletons: Theory and applications. In Proceedings of the CVPR (Computer Vision and Pattern Recognition Conference), Champaign, IL, USA, 15–18 June 1992; Volume 92, pp. 63–69. [Google Scholar]
- Potkonjak, V. Robotic handwriting. Int. J. Humanoid Robot. 2005, 2, 105–124. [Google Scholar] [CrossRef]
- Lin, H.I.; Chen, X.; Lin, T.T. Calligraphy Brush Trajectory Control of by a Robotic Arm. Appl. Sci. 2020, 10, 8694. [Google Scholar] [CrossRef]
- Wu, R.; Zhou, C.; Chao, F.; Yang, L.; Lin, C.M.; Shang, C. GANCCRobot: Generative adversarial nets based chinese calligraphy robot. Inf. Sci. 2020, 516, 474–490. [Google Scholar] [CrossRef]
- Lin, G.; Guo, Z.; Chao, F.; Yang, L.; Chang, X.; Lin, C.M.; Zhou, C.; Vijayakumar, V.; Shang, C. Automatic stroke generation for style-oriented robotic Chinese calligraphy. Future Gener. Comput. Syst. 2021, 119, 20–30. [Google Scholar] [CrossRef]
- Mueller, S.; Huebel, N.; Waibel, M.; D’Andrea, R. Robotic calligraphy—Learning how to write single strokes of Chinese and Japanese characters. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1734–1739. [Google Scholar] [CrossRef]
- Wong, H.T.; Ip, H.H. Virtual brush: A model-based synthesis of Chinese calligraphy. Comput. Graph. 2000, 24, 99–113. [Google Scholar] [CrossRef]
- Xu, S.; Tang, M.; Lau, F.; Pan, Y. A solid model based virtual hairy brush. Comput. Graph. Forum 2002, 21, 299–308. [Google Scholar] [CrossRef]
- Xu, S.; Tang, M.; Lau, F.C.; Pan, Y. Virtual hairy brush for painterly rendering. Graph. Model. 2004, 66, 263–302. [Google Scholar] [CrossRef]
- Berio, D.; Calinon, S.; Leymarie, F.F. Learning dynamic graffiti strokes with a compliant robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 3981–3986. [Google Scholar] [CrossRef]
- Scalera, L.; Seriani, S.; Gasparetto, A.; Gallina, P. Non-photorealistic rendering techniques for artistic robotic painting. Robotics 2019, 8, 10. [Google Scholar] [CrossRef]
- Beltramello, A.; Scalera, L.; Seriani, S.; Gallina, P. Artistic robotic painting using the palette knife technique. Robotics 2020, 9, 15. [Google Scholar] [CrossRef]
- Karimov, A.; Kopets, E.; Leonov, S.; Scalera, L.; Butusov, D. A Robot for Artistic Painting in Authentic Colors. J. Intell. Robot. Syst. 2023, 107, 34. [Google Scholar] [CrossRef]
- Igno-Rosario, O.; Hernandez-Aguilar, C.; Cruz-Orea, A.; Dominguez-Pacheco, A. Interactive system for painting artworks by regions using a robot. Robot. Auton. Syst. 2019, 121, 103263. [Google Scholar] [CrossRef]
- Fan, K.; Li, J.; Li, S. Fine grained control of robotic calligraphy. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 1089–1093. [Google Scholar] [CrossRef]
- Zhang, T.Y.; Suen, C.Y. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]
- Favreau, J.D.; Lafarge, F.; Bousseau, A. Fidelity vs. Simplicity: A Global Approach to Line Drawing Vectorization. ACM Trans. Graph. 2016, 35, 1–10. [Google Scholar] [CrossRef]
- Arditi, A.; Cho, J. Serifs and font legibility. Vis. Res. 2005, 45, 2926–2933. [Google Scholar] [CrossRef] [PubMed]
- Garvey, P.M.; Zineddin, A.Z.; Pietrucha, M.T. Letter legibility for signs and other large format applications. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (October 2001); SAGE Publications: Los Angeles, CA, USA, 2001; Volume 45, pp. 1443–1447. [Google Scholar]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zingrebe, D.S.; Gülzow, J.M.; Deussen, O. Robotic Writing of Arbitrary Unicode Characters Using Paintbrushes. Robotics 2023, 12, 72. https://doi.org/10.3390/robotics12030072
Zingrebe DS, Gülzow JM, Deussen O. Robotic Writing of Arbitrary Unicode Characters Using Paintbrushes. Robotics. 2023; 12(3):72. https://doi.org/10.3390/robotics12030072
Chicago/Turabian StyleZingrebe, David Silvan, Jörg Marvin Gülzow, and Oliver Deussen. 2023. "Robotic Writing of Arbitrary Unicode Characters Using Paintbrushes" Robotics 12, no. 3: 72. https://doi.org/10.3390/robotics12030072
APA StyleZingrebe, D. S., Gülzow, J. M., & Deussen, O. (2023). Robotic Writing of Arbitrary Unicode Characters Using Paintbrushes. Robotics, 12(3), 72. https://doi.org/10.3390/robotics12030072