
Hybrid Vibration Control Algorithm of a Flexible Manipulator System


Abstract
1. Introduction
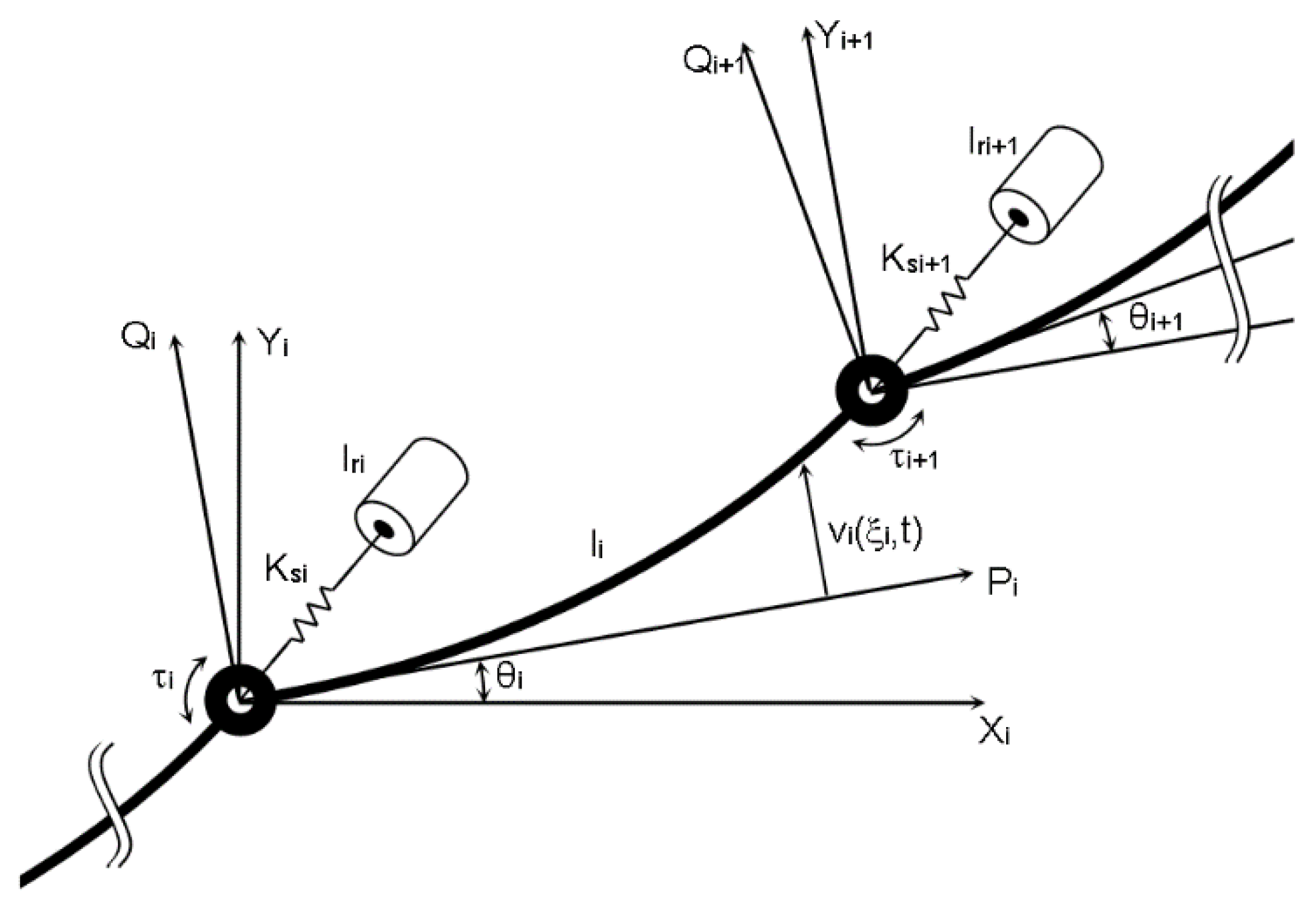
2. Mathematical Modelling
- The links are assumed to move in a horizontal plane, and the effect of gravity is ignored.
- The payload attached to the last link is considered a concentrated mass.
- The longitudinal deflections of the links are negligibly small.
- The arm is considered to be uniform.
3. Control Structure
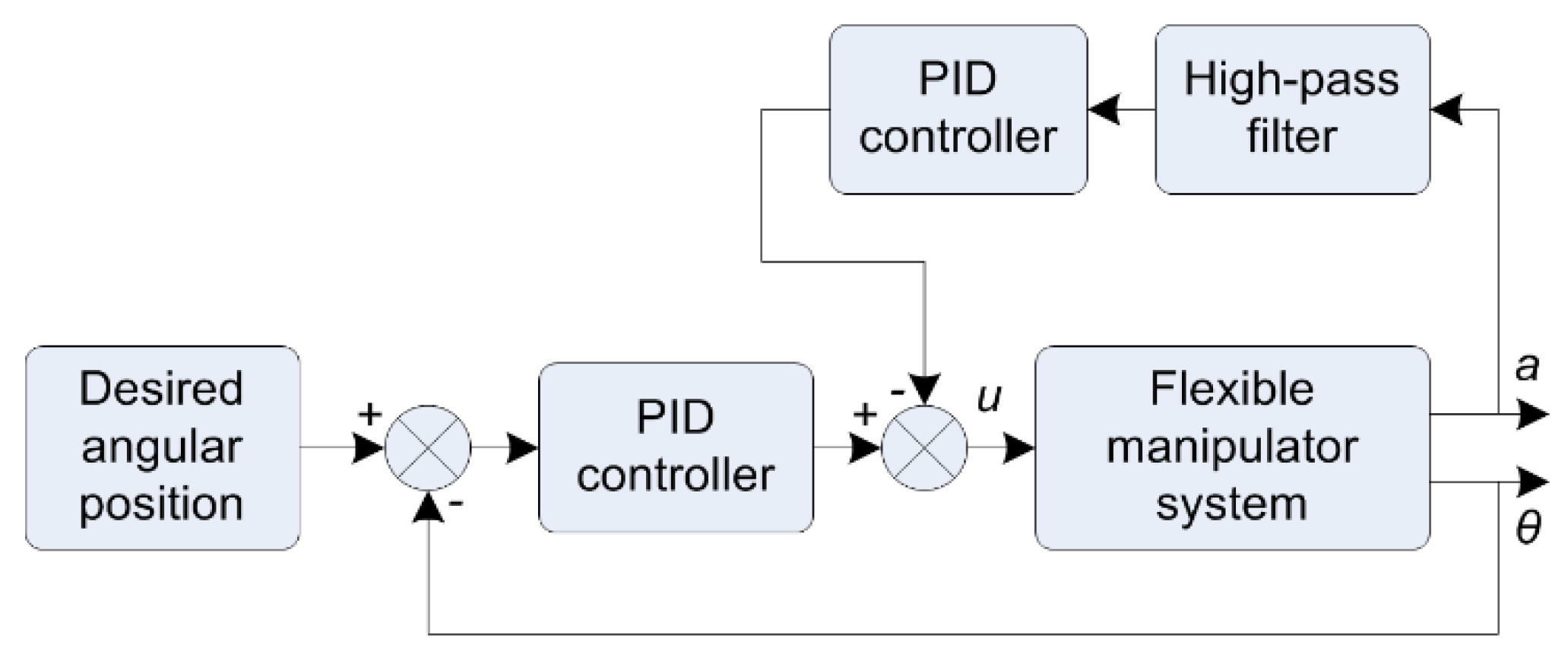
3.1. Filter-Based Damping Control Scheme
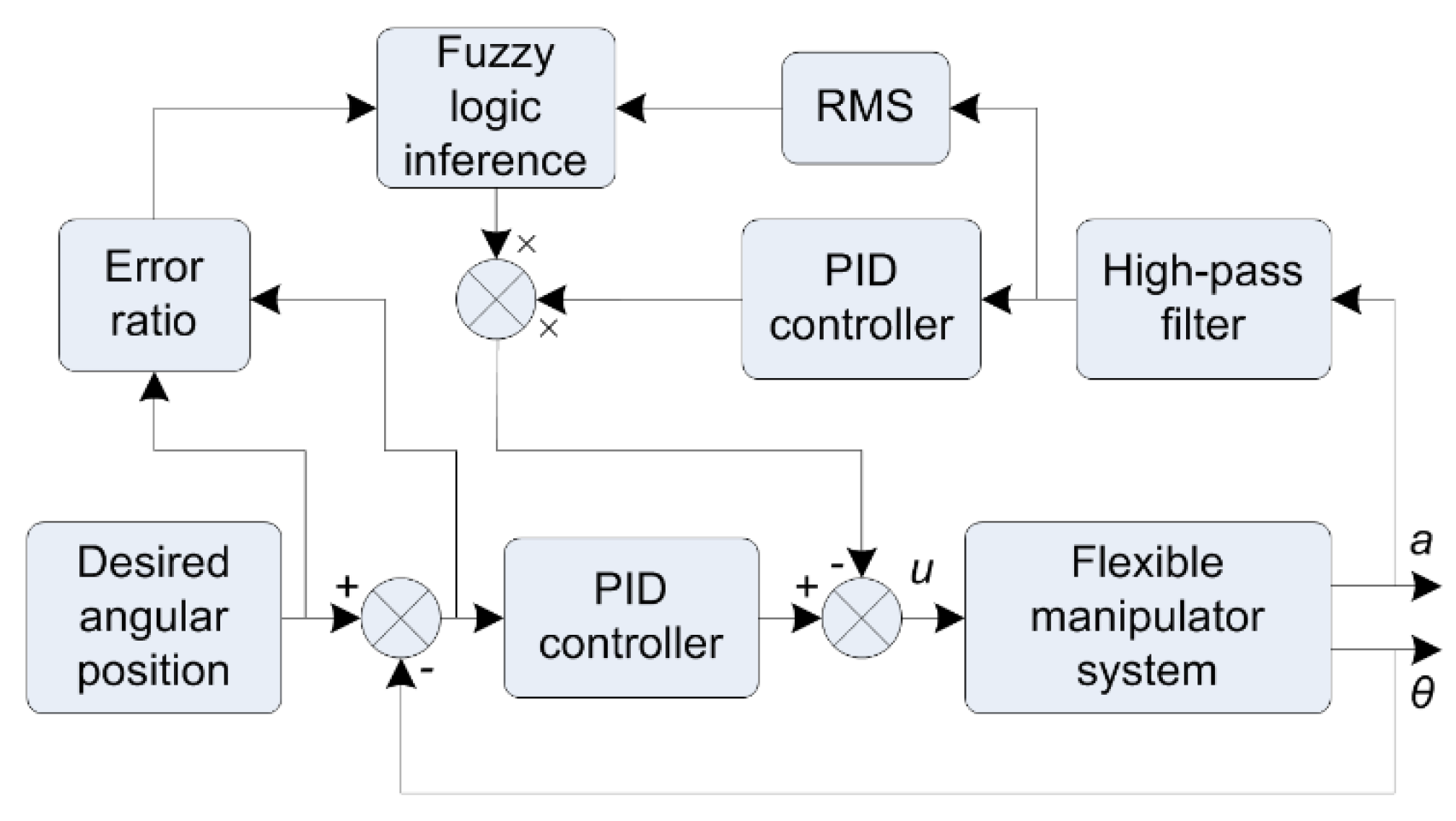
3.2. Hybrid Damping Control Scheme
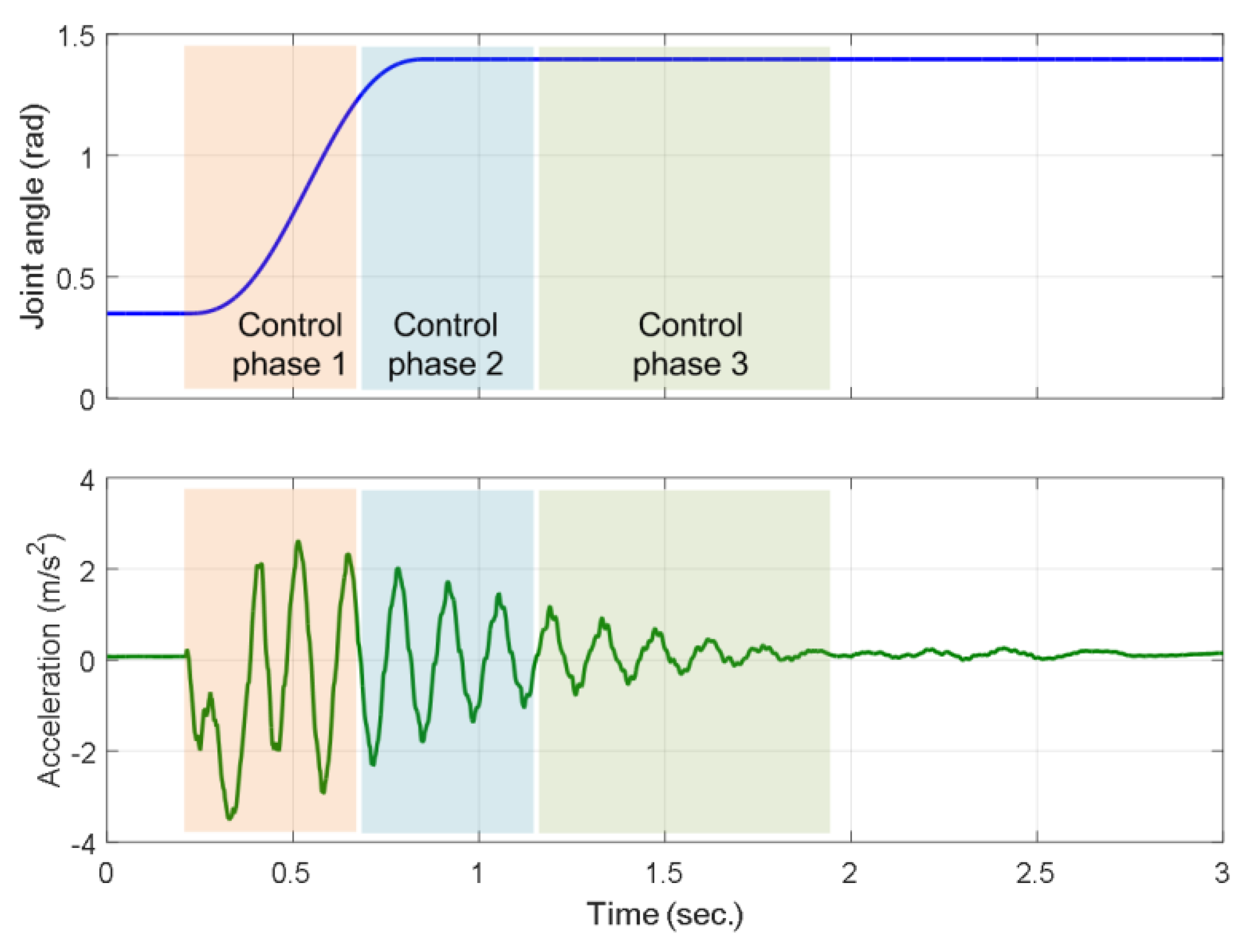
4. Experimental Results
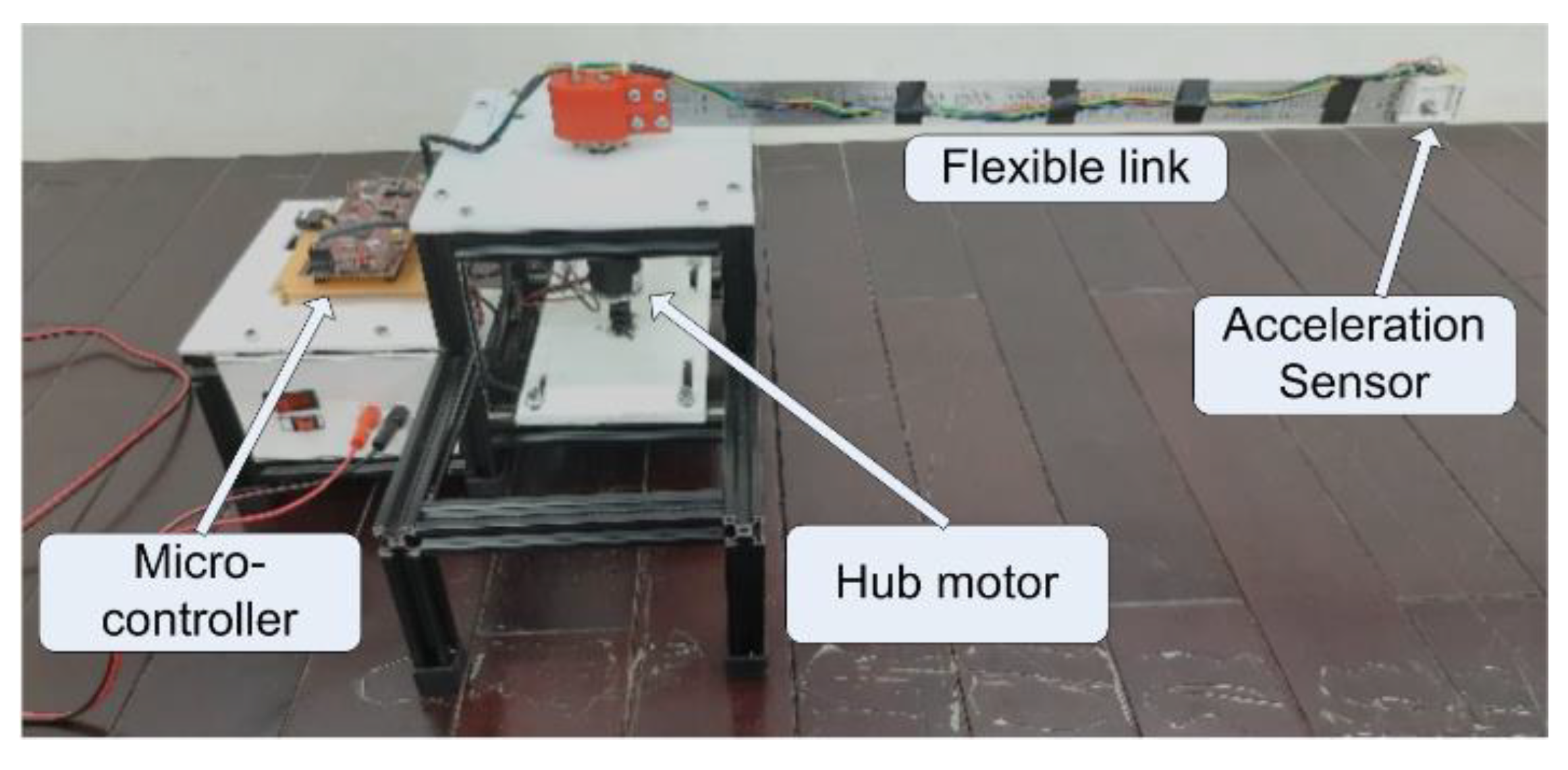
4.1. Hardware Structure
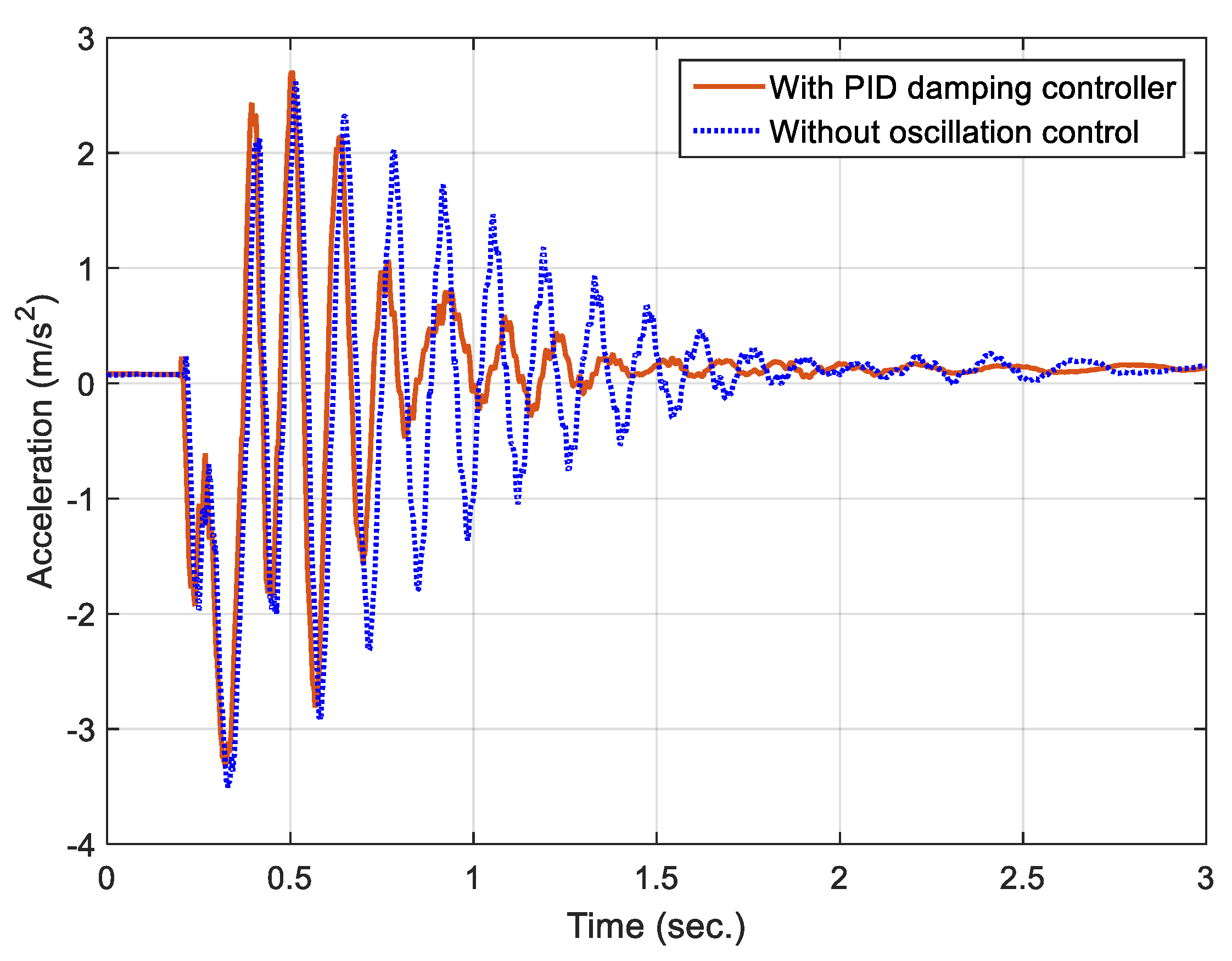
4.2. Performance of a Filter-Based Damping Controller
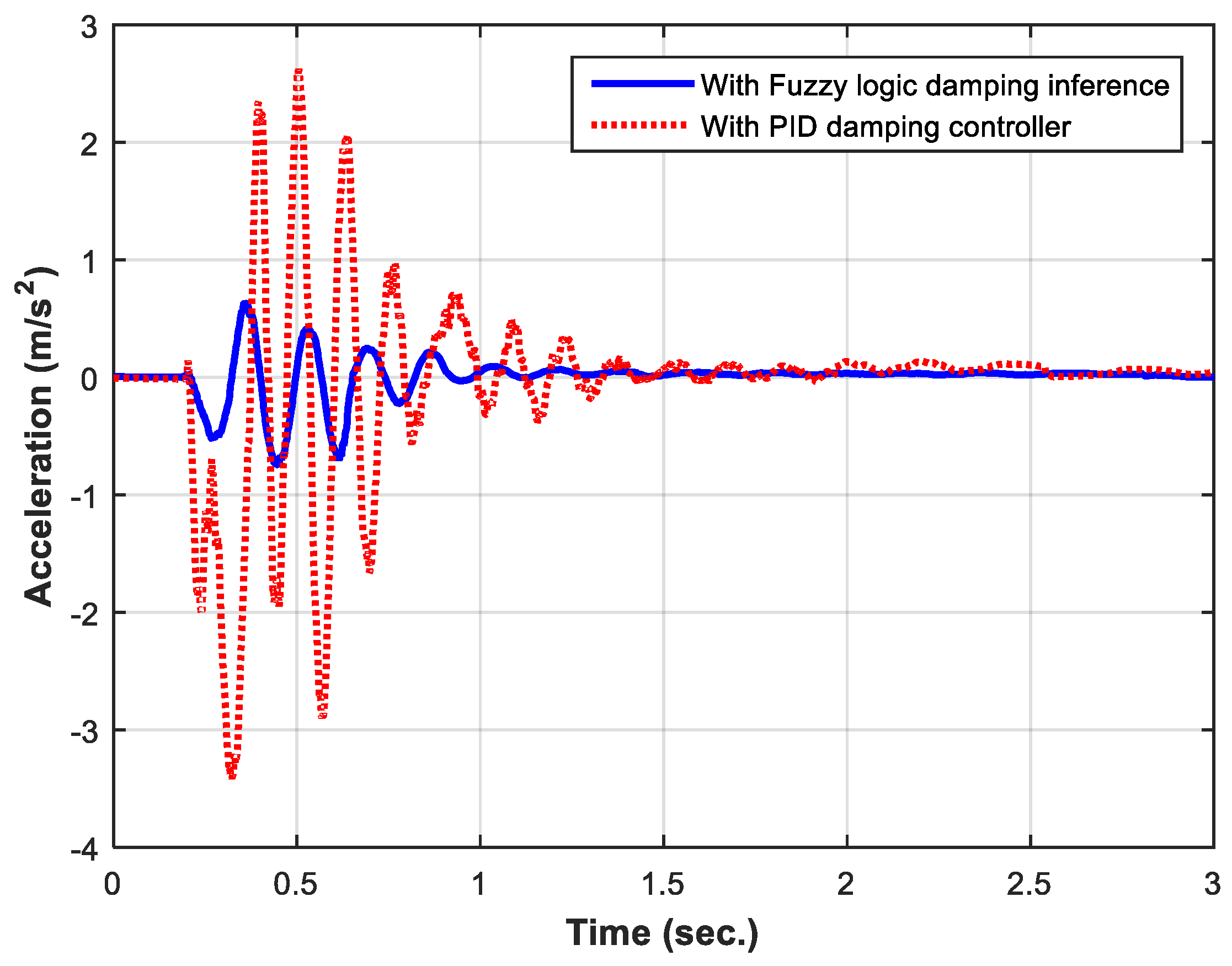
4.3. Performance of Hybrid Fuzzy Logic-PID Controller
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aubrun, J.N. Theory of the control structures by low-authority controllers. J. Guid. Control 1980, 3, 444–451. [Google Scholar] [CrossRef]
- Book, W.J.; Alberts, T.E.; Hastings, G.G. Design strategies for high-speed lightweight robots. Comput. Mech. Eng. 1986, 26–33. [Google Scholar]
- Ge, S.S.; Lee, T.H.; Zhu, G. Improving regulation of a single-link flexible manipulator with strain feedback. IEEE Trans. Robot. Autom. 1998, 14, 179–185. [Google Scholar] [CrossRef]
- Moallem, M.; Patel, R.V.; Khorasani, K. An Inverse Dynamics Control Strategy for Tip Position Tracking of Flexible Multi-Link Manipulators. IFAC Proc. Vol. 1996, 29, 85–90. [Google Scholar] [CrossRef]
- De Queiroz, M.S.; Dawson, D.M.; Agarwal, M.; Zhang, F. Adaptive nonlinear boundary control of a flexible link robot arm. IEEE Trans. Robot. Autom. 1999, 15, 779–787. [Google Scholar] [CrossRef]
- Chen, W. Dynamic modeling of multi-link flexible robotic manipulators. Comput. Struct. 2001, 79, 183–195. [Google Scholar] [CrossRef]
- Cheong, J.; Youm, Y.; Chung, W. Joint tracking controller for multi-link flexible robot using disturbance observer and parameter adaptation scheme. J. Robot. Syst. 2002, 19, 401–417. [Google Scholar] [CrossRef]
- Meek, J.L.; Hua, L. Nonlinear dynamics analysis of flexible beams under large overall motions and the flexible manipulator simulation. Comput. Struct. 1995, 56, 1–14. [Google Scholar] [CrossRef]
- Du, H.; Lim, M.K.; Liew, K.M. A nonlinear finite element model for dynamics of flexible manipulators. Mech. Mach. Theory 1996, 31, 1109–1119. [Google Scholar] [CrossRef]
- Ge, S.S.; Lee, T.H.; Zhu, G. A nonlinear feedback controller for a single-link flexible manipulator based on a finite element model. J. Robot. Syst. 1997, 14, 165–178. [Google Scholar] [CrossRef]
- Nagaraj, B.; Nataraju, B.; Ghosal, A. Dynamics of a two-link flexible system undergoing locking: Mathematical modelling and comparison with experiments. J. Sound Vib. 1997, 207, 567–589. [Google Scholar] [CrossRef]
- Gamarra-Rosado, V.; Yuhara, E. Dynamic modeling and simulation of a flexible robotic manipulator. Robotica 1999, 17, 523–528. [Google Scholar] [CrossRef]
- Theodore, R.; Ghosal, A. Comparison of the Assumed Modes and Finite Element Models for Flexible Multilink Manipulators. I. J. Robot. Res. 1995, 14, 91–111. [Google Scholar] [CrossRef]
- Tokhi, M.O.; Azad, A.K.M. Flexible Robot Manipulators Modelling, Simulation and Control, Control Engineering Series, 2nd ed.; The Institution of Engineering and Technology: London, UK, 2017. [Google Scholar]
- Zhou, J.; Li, L.; Ye, L.; Cao, Q. Research on hardware-in-the-loop real-time simulation system for vibration control of Figflexible manipulator. In Proceedings of the IEEE 10th International Conference on Computer-Aided Industrial Design & Conceptual Design, Wenzhou, China, 26–29 November 2009. [Google Scholar] [CrossRef]
- Tokhi, M.O.; Azad, A.K.M. Control of Flexible Manipulator Systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 1996, 210, 113–130. [Google Scholar] [CrossRef]
- Dehghani, A.; Khodadadi, H. Fuzzy Logic Self-Tuning PID control for a single-link flexible joint robot manipulator in the presence of uncertainty. In Proceedings of the 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Republic of Korea, 13–16 October 2015. [Google Scholar] [CrossRef]
- Shi, J.; Zheng, W.; Li, J.; Chen, D. A distributed fuzzy logic controller based aptitudinal control for single-link flexible manipulator. In Proceedings of the IEEE Symposium on Electrical & Electronics Engineering (EEESYM), Kuala Lumpur, Malaysia, 24–27 July 2012. [Google Scholar] [CrossRef]
- Geniele, H.; Patel, R.V.; Khorasani, K. Control of a flexible-link manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995. [Google Scholar] [CrossRef]
- Zhang, H.; Gao, X.; Xu, G. Research on Improved PD Control of Flexible Manipulator. In Proceedings of the Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar] [CrossRef]
- Abdullahi, A.; Mohamed, Z.; Muhammad, M.; Bature, A. Vibration and tip deflection control of a Single-link flexible manipulator. Int. J. Instrum. Control Syst. 2013, 3, 17–27. [Google Scholar] [CrossRef]
- Li, L.; Cao, F.; Liu, J. Vibration control of flexible manipulator with unknown control direction. Int. J. Control 2021, 94, 2690–2702. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Control Method of Flexible Manipulator Servo System Based on a Combination of RBF Neural Network and Pole Placement Strategy. Mathematics 2021, 9, 896. [Google Scholar] [CrossRef]
- Meng, Q.; Lai, X.; Yan, Z.; Su, C.Y.; Wu, M. Motion Planning and Adaptive Neural Tracking Control of an Uncertain Two-Link Rigid–Flexible Manipulator with Vibration Amplitude Constraint. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 3814–3828. [Google Scholar] [CrossRef]
- Malgaca, L.; Uyar, M. Hybrid vibration control of a flexible composite box cross-sectional manipulator with piezoelectric actuators. Compos. Part B Eng. 2019, 176, 107278. [Google Scholar] [CrossRef]
- Lu, E.; Li, W.; Yang, X.; Wang, Y.; Liu, Y. Optimal placement and active vibration control for piezoelectric smart flexible manipulators using modal H2 norm. J. Intell. Mater. Syst. Struct. 2018, 29, 2333–2343. [Google Scholar] [CrossRef]
- Wu, G.; Yang, Y.; Li, C.; Wei, Y. H Infinity Feedback Control of a Piezoelectric Micromanipulator with Actuator Saturation. In Proceedings of the IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO), Tianjin, China, 8–12 August 2022. [Google Scholar] [CrossRef]
- Szabat, K.; Orlowska-Kowalska, T. Vibration Suppression in a Two-Mass Drive System Using PI Speed Controller and Additional Feedbacks—Comparative Study. IEEE Trans. Ind. Electron. 2007, 54, 1193–1206. [Google Scholar] [CrossRef]
- Brock, S.; Luczak, D.; Nowopolski, K.; Pajchrowski, T.; Zawirski, K. Two Approaches to Speed Control for Multi-Mass System with Variable Mechanical Parameters. IEEE Trans. Ind. Electron 2016, 64, 3338–3347. [Google Scholar] [CrossRef]
- Łuczak, D. Nonlinear Identification with Constraints in Frequency Domain of Electric Direct Drive with Multi-Resonant Mechanical Part. Energies 2021, 14, 7190. [Google Scholar] [CrossRef]
- Szabat, K.; Wróbel, K.; Dróżdż, K.; Janiszewski, D.; Pajchrowski, T.; Wójcik, A. A Fuzzy Unscented Kalman Filter in the Adaptive Control System of a Drive System with a Flexible Joint. Energies 2020, 13, 2056. [Google Scholar] [CrossRef]
- Zawirski, K.; Nowopolski, K.; Wicher, B. Experimental Analysis of Selected Control Algorithms of Electromechanical Object with Backlash and Elastic Joint. In Proceedings of the 2016 IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, Bulgaria, 25–28 September 2016; pp. 1161–1166. [Google Scholar]
- Nowopolski, K.; Wicher, B. Parametric Identification of Electrical Drive with Complex Mechanical Structure Utilizing Particle Swarm Optimization Method. In Proceedings of the 2017 19th European Conference on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–10. [Google Scholar]
- Łuczak, D.; Gniadek, M. Interaction of input shaping and fuzzy logic control. In Proceedings of the 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 22–25 August 2015; pp. 886–891. [Google Scholar] [CrossRef]
- Denavit, J.; Hartenberg, R. A kinematic notation for lower-pair mechanisms based on matrices. J. Appl. Mech. 1955, 22, 215–221. [Google Scholar] [CrossRef]
- Meirovitch, L. Analytical Methods in Vibrations; Macmillan: New York, NY, USA, 1967. [Google Scholar]
- Morris, A.; Madani, A. Quadratic optimal control of a two-flexible-link robot manipulator. Robotica 1998, 16, 97–108. [Google Scholar] [CrossRef]
- Subudhi, B.; Morris, A. Singular perturbation approach to trajectory tracking of flexible robot with joint elasticity. Int. J. Syst. Sci. 2003, 34, 167–179. [Google Scholar] [CrossRef]
- Fu, K.S.; Gonzalez, R.C.; Lee, C.S.G. Robotics: Control, Sensing, Vision and Intelligence; McGraw-Hill: New York, NY, USA; London, UK, 1987. [Google Scholar]
- Tokhi, M.O.; Azad, A.K.M. Chapter 9—Collocated and non-collocated control. In Flexible Robot Manipulators Modelling, Simulation and Control, 2nd ed.; The Institution of Engineering and Technology: London, UK, 2017; pp. 261–292. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
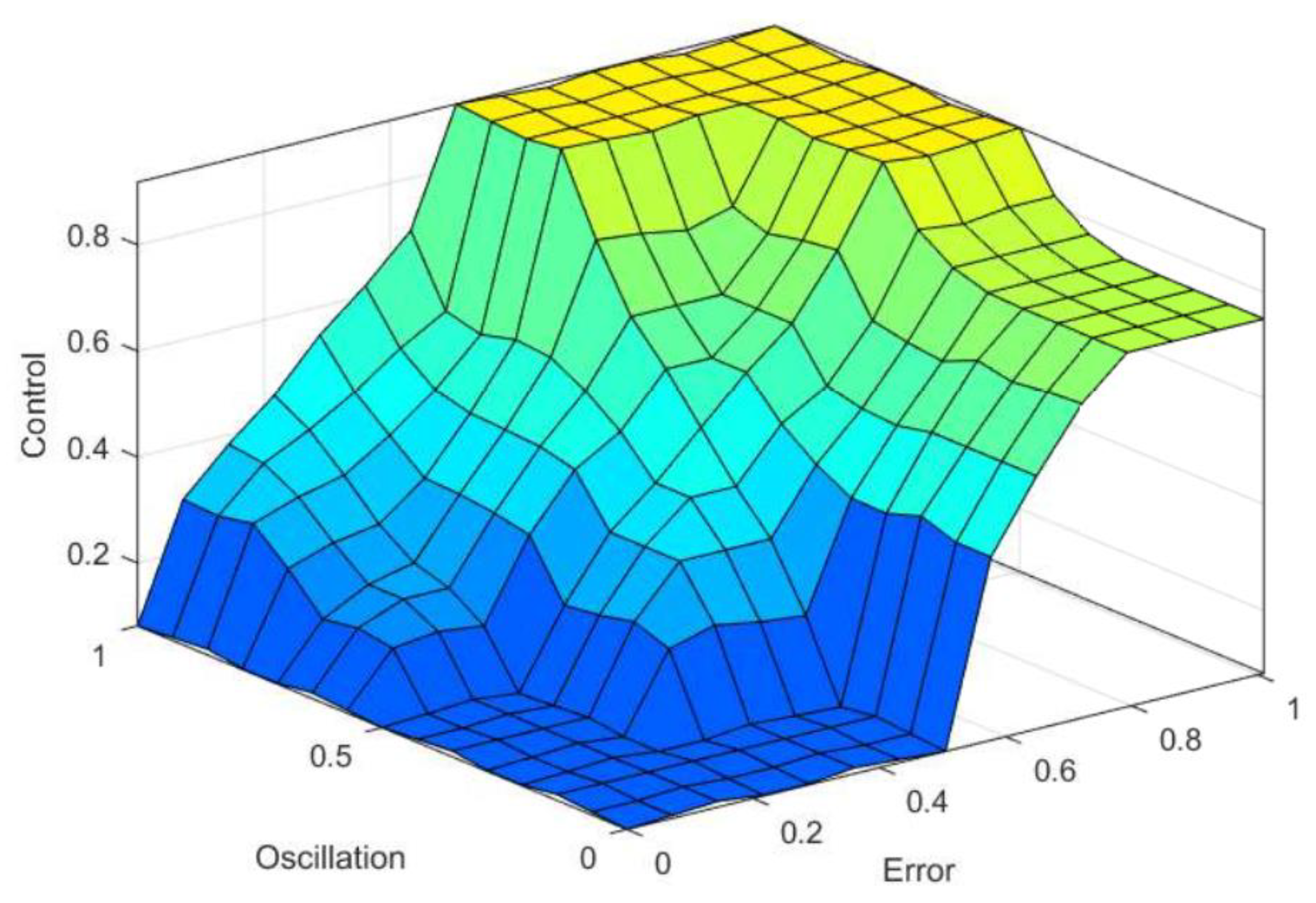
| Oscillation | VS | RS | SS | RB | BB | |
|---|---|---|---|---|---|---|
| Error | ||||||
| VS | VS | VS | VS | VS | VS | |
| RS | VS | VS | VS | RS | SS | |
| SS | VS | VS | SS | BB | BB | |
| RB | RB | RB | BB | BB | BB | |
| BB | RB | RB | BB | BB | BB | |
| Components | Value |
|---|---|
| Link’s dimensions | 500 × 25 × 1.5 mm |
| Link’s material | Stainless steel |
| Base’s dimensions | 340 × 490 × 200 mm |
| Base’s material | Aluminum |
| Operation range | 0–180° |
| Joint’s dimensions | 63 × 54 × 40 mm |
| Joint’s material | PLA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, V.B.; Bui, X.C. Hybrid Vibration Control Algorithm of a Flexible Manipulator System. Robotics 2023, 12, 73. https://doi.org/10.3390/robotics12030073
Nguyen VB, Bui XC. Hybrid Vibration Control Algorithm of a Flexible Manipulator System. Robotics. 2023; 12(3):73. https://doi.org/10.3390/robotics12030073
Chicago/Turabian StyleNguyen, Van Binh, and Xuan Cuong Bui. 2023. "Hybrid Vibration Control Algorithm of a Flexible Manipulator System" Robotics 12, no. 3: 73. https://doi.org/10.3390/robotics12030073
APA StyleNguyen, V. B., & Bui, X. C. (2023). Hybrid Vibration Control Algorithm of a Flexible Manipulator System. Robotics, 12(3), 73. https://doi.org/10.3390/robotics12030073