Globally Optimal Redundancy Resolution with Dynamic Programming for Robot Planning: A ROS Implementation



Abstract
1. Introduction
2. Materials and Methods
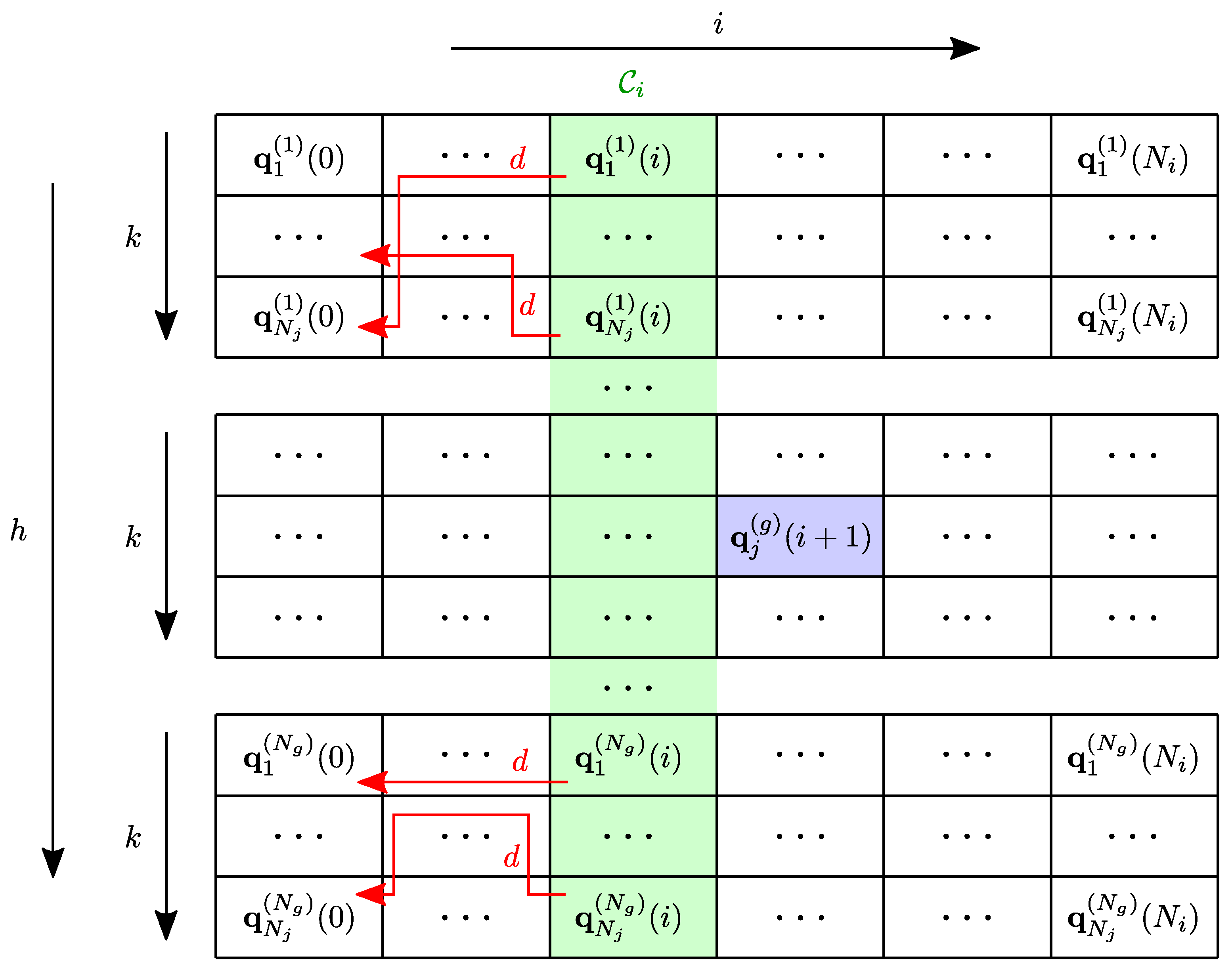
2.1. Discrete Dynamic Programming
2.2. State Space Grids
2.3. DP-Inspired Search Algorithm
3. ROS Implementation
3.1. Designing an Extension for MoveIt!
3.2. Requirements
- Req. 1:
- to allow for a seamless integration with the ROS ecosystem, so as to reuse, as much as possible, the available technologies (e.g., visualization and analysis tools);
- Req. 2:
- to support the generation of multiple homogeneous grids;
- Req. 3:
- to perform a search on such grids to find the resolution-optimal joint-space solution [9];
- Req. 4:
- to support the optimization for homogeneous grids [14];
- Req. 5:
- to allow for the addition of user-defined constraints and objective functions;
- Req. 6:
- to allow for the topological analysis of the state space and the resolution-optimal trajectory.
3.3. Context
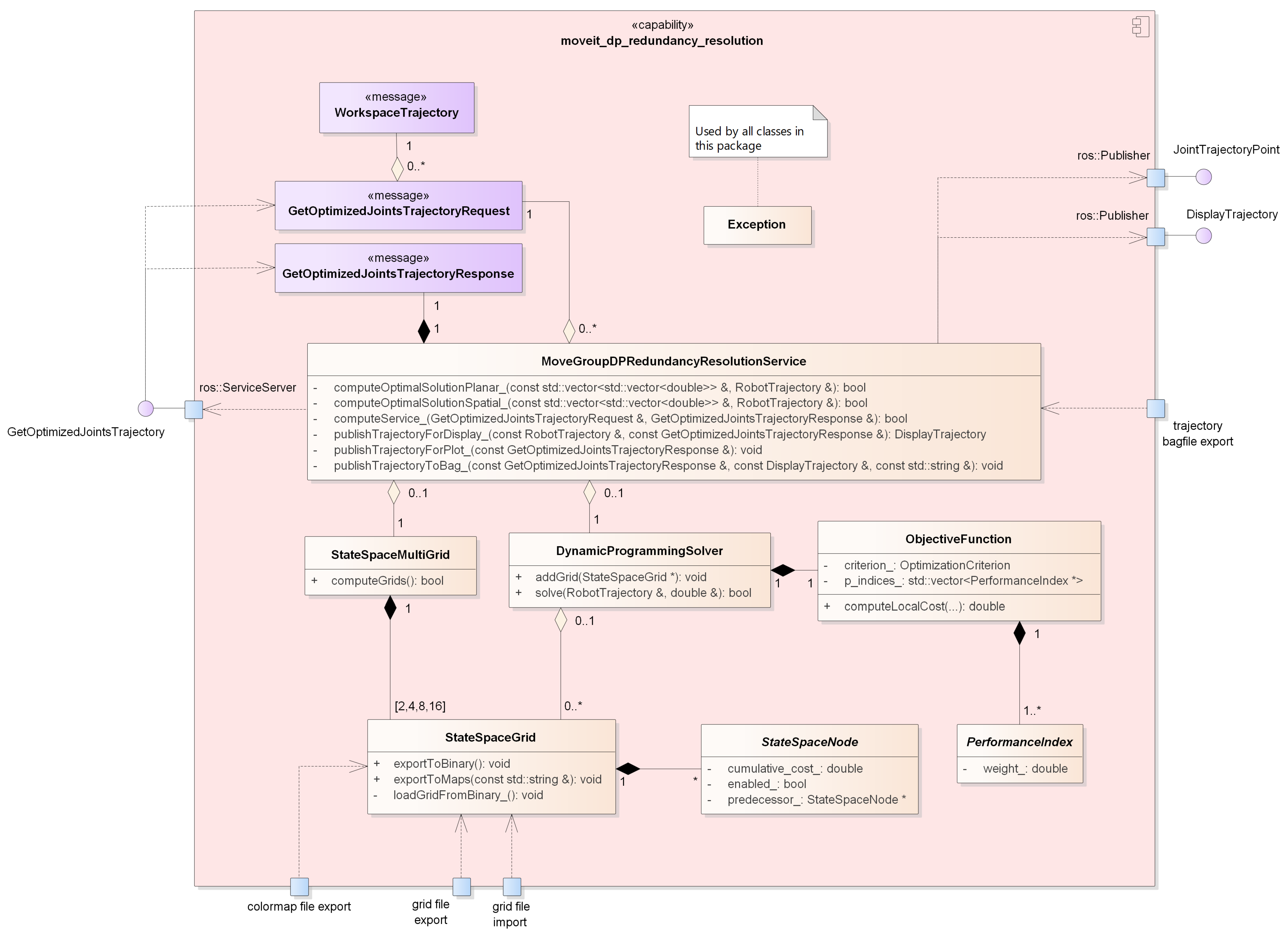
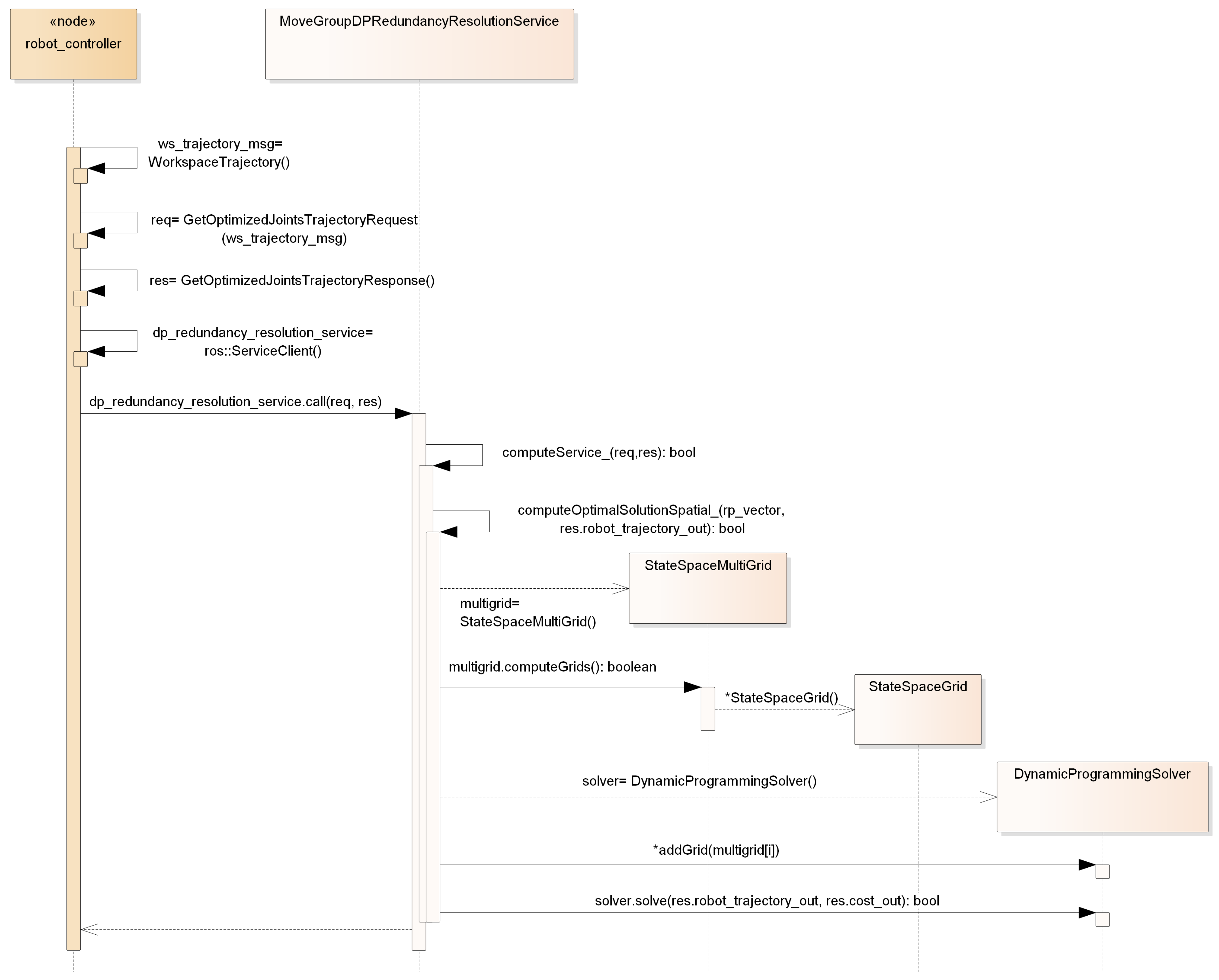
3.4. Architectural Design
3.5. Use of Numeric Solvers
4. Results
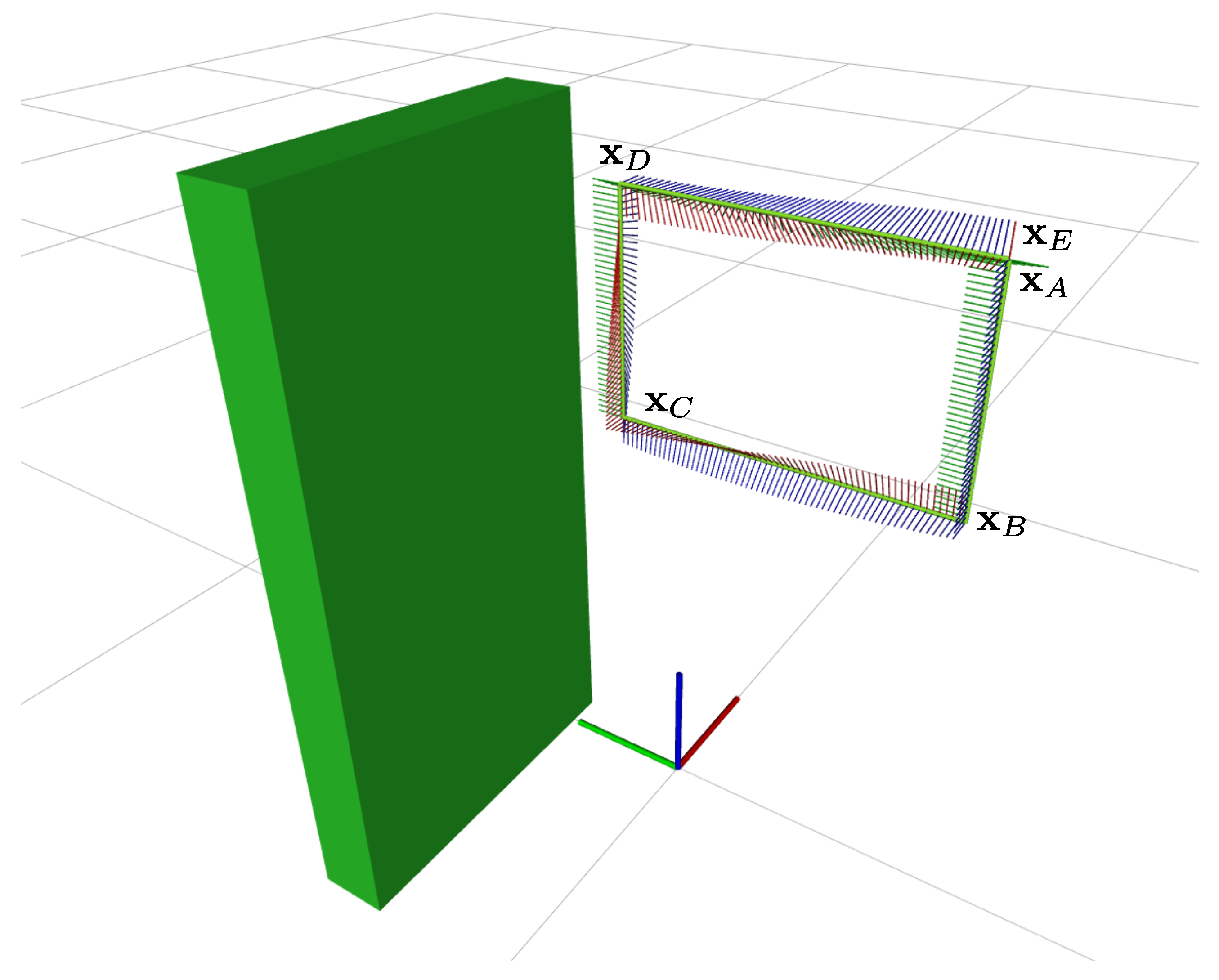
4.1. Use Case Description
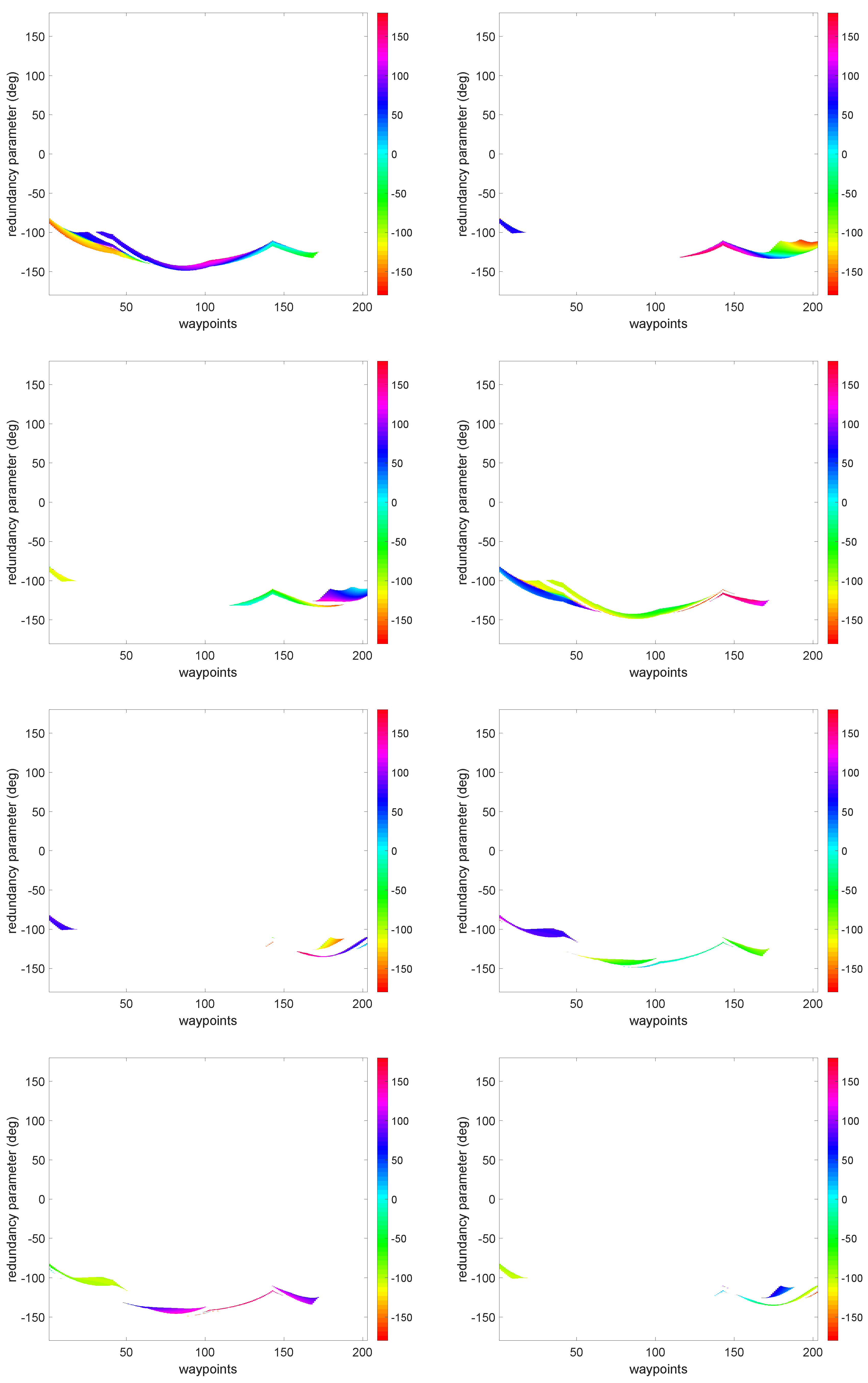
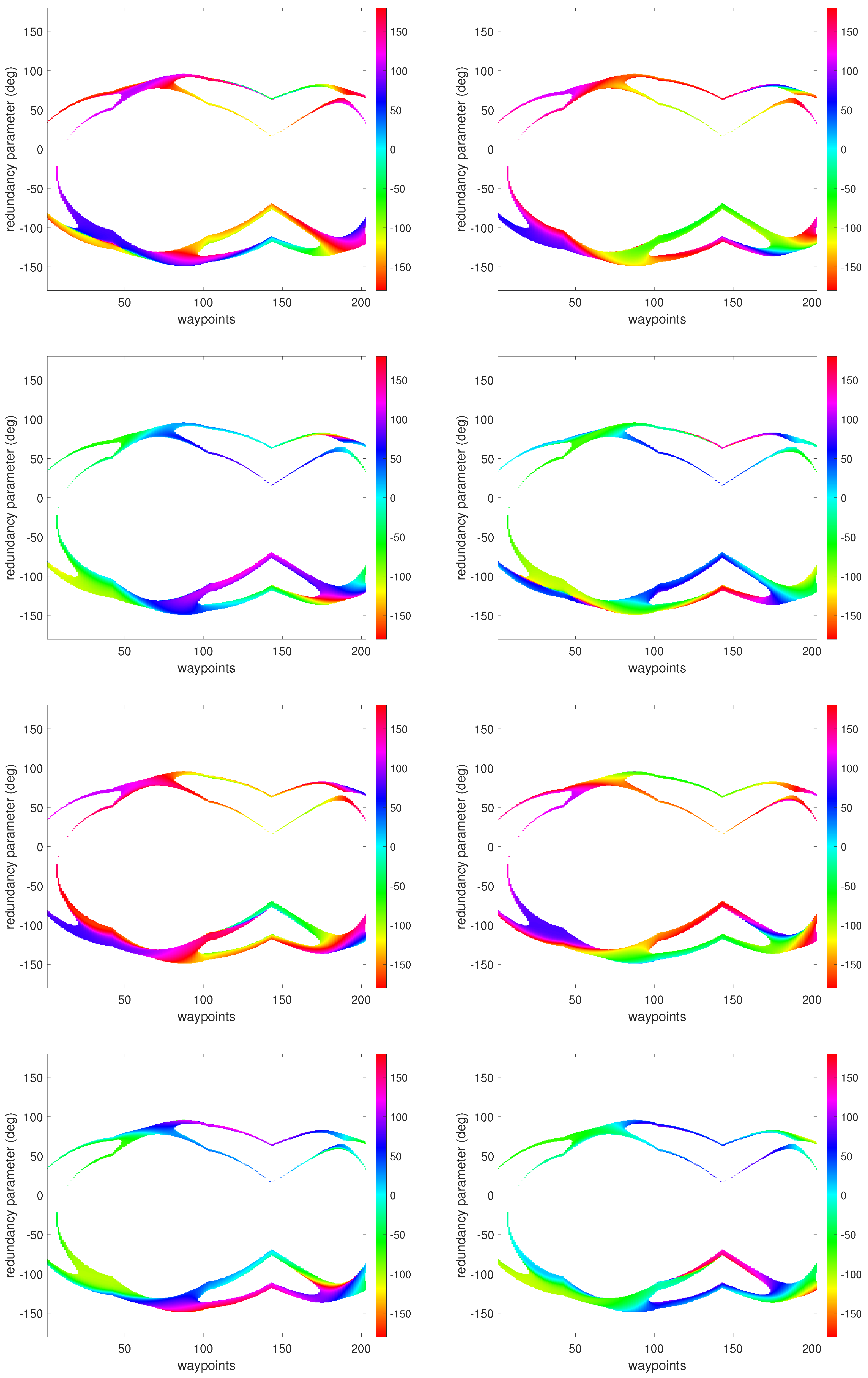
4.2. Grids Computation
- when fixing the redundant joints to specific values, the manipulator must be no longer redundant in order for (10) to return a finite number of solutions: at algorithmic singularities, i.e., configurations nullifying the determinant of the extended Jacobian, this is not the case.
- ;
- ;
- .
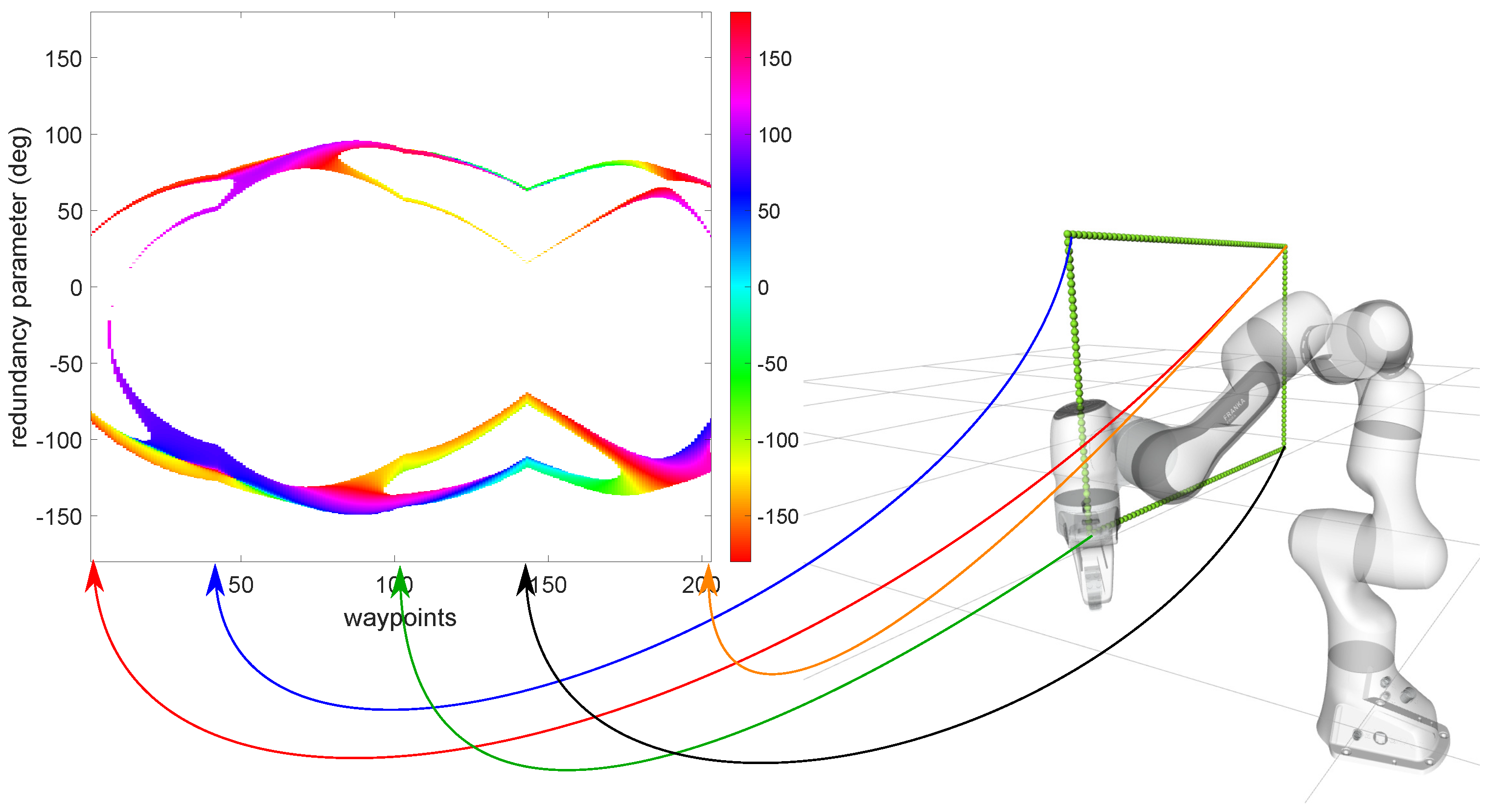
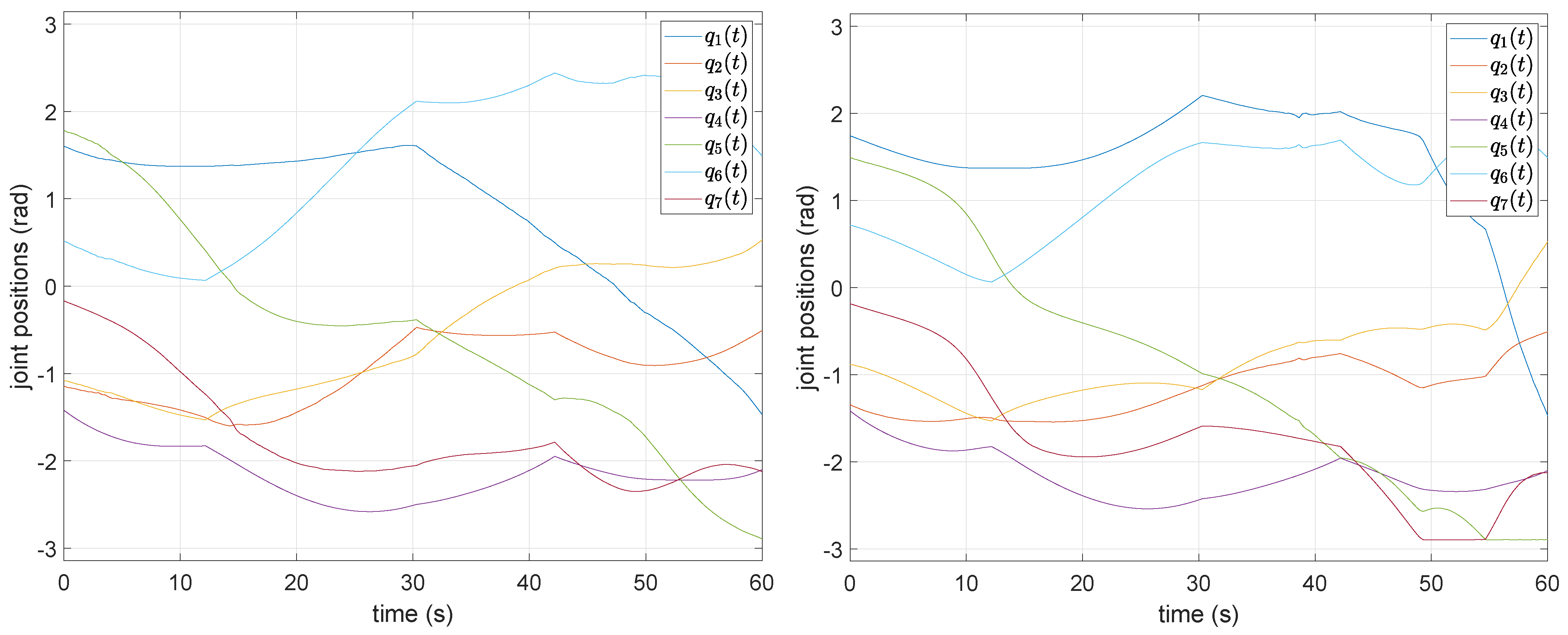
4.3. Globally Optimal and Pareto-Optimal Solution
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Kazerounian, K.; Wang, Z. Global versus local optimization in redundancy resolution of robotic manipulators. Int. J. Robot. Res. 1988, 7, 3–12. [Google Scholar] [CrossRef]
- Nakamura, Y.; Hanafusa, H. Optimal redundancy control of robot manipulators. Int. J. Robot. Res. 1987, 6, 32–42. [Google Scholar] [CrossRef]
- Guigue, A.; Ahmadi, M.; Hayes, M.J.D.; Langlois, R.; Tang, F.C. A dynamic programming approach to redundancy resolution with multiple criteria. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1375–1380. [Google Scholar] [CrossRef]
- Gao, J.; Pashkevich, A.; Caro, S. Optimization of the robot and positioner motion in a redundant fiber placement workcell. Mech. Mach. Theory 2017, 114, 170–189. [Google Scholar] [CrossRef]
- Shen, Y.; Huper, K. Optimal trajectory planning of manipulators subject to motion constraints. In Proceedings of the 12th International Conference on Advanced Robotics, Seattle, WA, USA, 17–20 July 2005. [Google Scholar] [CrossRef]
- Ascher, U.M.; Mattheij, R.M.M.; Russell, R.D. Numerical Solution of Boundary Value Problems for Ordinary Differential Equations; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1995. [Google Scholar] [CrossRef]
- Keller, H.B. Numerical Methods for Two-Point Boundary-Value Problems; Courier Dover Publications: Garden City, NY, USA, 2018. [Google Scholar]
- Ferrentino, E.; Chiacchio, P. A topological approach to globally-optimal redundancy resolution with dynamic programming. In ROMANSY 22–Robot Design, Dynamics and Control; Arakelian, V., Wenger, P., Eds.; Springer: Cham, Switzerland, 2018; Volume 584, pp. 77–85. [Google Scholar] [CrossRef]
- Pashkevich, A.P.; Dolgui, A.B.; Chumakov, O.A. Multiobjective optimization of robot motion for laser cutting applications. Int. J. Comput. Integr. Manuf. 2004, 17, 171–183. [Google Scholar] [CrossRef]
- Dolgui, A.; Pashkevich, A. Manipulator motion planning for high-speed robotic laser cutting. Int. J. Prod. Res. 2009, 47, 5691–5715. [Google Scholar] [CrossRef]
- Guigue, A.; Ahmadi, M.; Langlois, R.; Hayes, M.J.D. Pareto optimality and multiobjective trajectory planning for a 7-DOF redundant manipulator. IEEE Trans. Robot. 2010, 26, 1094–1099. [Google Scholar] [CrossRef]
- Cavalcanti Santos, J.; Martins da Silva, M. Redundancy Resolution of Kinematically Redundant Parallel Manipulators Via Differential Dynamic Programing. J. Mech. Robot. 2017, 9. [Google Scholar] [CrossRef]
- Ferrentino, E.; Chiacchio, P. On the optimal resolution of inverse kinematics for redundant manipulators using a topological analysis. J. Mech. Robot. 2020, 12. [Google Scholar] [CrossRef]
- What is ROS? Available online: http://www.ros.org/ (accessed on 3 March 2021).
- Ferrentino, E.; Chiacchio, P. Redundancy parametrization in globally-optimal inverse kinematics. In Advances in Robot Kinematics 2018; Lenarcic, J., Parenti-Castelli, V., Eds.; Springer: Cham, Switzerland, 2018; Volume 8, pp. 47–55. [Google Scholar] [CrossRef]
- Burdick, J.W. On the inverse kinematics of redundant manipulators: Characterization of the self-motion manifolds. In Proceedings of the 4th International Conference on Advanced Robotics, Scottsdale, AZ, USA, 14–19 May 1989; Waldron, K.J., Ed.; Springer: Berlin/Heidelberg, Germany, 1989; Volume 4, pp. 25–34. [Google Scholar] [CrossRef]
- Burdick, J.W. On the Inverse Kinematics of Redundant Manipulators: Characterization of the Self-Motion Manifolds. In Proceedings of the IEEE International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; pp. 264–270. [Google Scholar] [CrossRef]
- Wenger, P. A New General Formalism for the Kinematic Analysis of All Nonredundant Manipulators. In Proceedings of the IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 442–447. [Google Scholar] [CrossRef]
- Pámanes, J.A.; Wenger, P.; Zapata, J.L. Motion Planning of Redundant Manipulators for Specified Trajectory Tasks; Advances in Robot Kinematics; Springer: Dordrecht, The Netherlands, 2002; pp. 203–212. [Google Scholar] [CrossRef]
- Sniedovich, M. Dijkstra’s algorithm revisited: The dynamic programming connexion. Control. Cybern. 2006, 35, 599–620. [Google Scholar]
- MoveIt. Available online: https://moveit.ros.org/ (accessed on 3 March 2021).
- MoveIt Planners. Available online: https://moveit.ros.org/documentation/planners/ (accessed on 3 March 2021).
- MoveIt Concepts. Available online: https://moveit.ros.org/documentation/concepts/ (accessed on 3 March 2021).
- Ferrentino, E.; Salvioli, F. ROS/MoveIt! Extension for Redundancy Resolution with Dynamic Programming. GitHub/Zenodo. Available online: https://zenodo.org/record/3236880#.YAsFiehKhPY (accessed on 3 March 2021).
- Diankov, R. Automated Construction of Robotic Manipulation Programs. Ph.D. Thesis, Carnegie Mellon University, Pittsburgh, PA, USA, 26 August 2010. Available online: http://www.programmingvision.com/rosen_diankov_thesis.pdf (accessed on 3 March 2021).
- KDL Wiki. Available online: http://www.orocos.org/kdl (accessed on 3 March 2021).
- Ferrentino, E.; Chiacchio, P. Topological analysis of global inverse kinematic solutions for redundant manipulators. In ROMANSY 22–Robot Design, Dynamics and Control; Arakelian, V., Wenger, P., Eds.; Springer: Cham, Switzerland, 2018; Volume 584, pp. 69–76. [Google Scholar] [CrossRef]
- Panda Powertool. Available online: https://www.franka.de/panda (accessed on 3 March 2021).
- Khalil, W.; Kleinfinger, J. A new geometric notation for open and closed-loop robots. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; pp. 1174–1179. [Google Scholar] [CrossRef]
- Franka Control Interface Documentation. Available online: https://frankaemika.github.io/docs/ (accessed on 3 March 2021).
- Zaplana, I.; Basanez, L. A novel closed-form solution for the inverse kinematics of redundant manipulators through workspace analysis. Mech. Mach. Theory 2018, 121, 829–843. [Google Scholar] [CrossRef]
- Ferrentino, E.; Salvioli, F. Redundancy Resolution for Energy Minimization and Obstacle Avoidance with Franka Emika’s Panda Robot. Available online: https://youtu.be/AxL755_t3_o (accessed on 3 March 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| J1 | 0 | 0 | ||
| J2 | 0 | 0 | ||
| J3 | 0 | |||
| J4 | 0 | |||
| J5 | ||||
| J6 | 0 | 0 | ||
| J7 | 0 | |||
| Flange | 0 | 0 | 0 |
| Redundancy Parameter Resolution | Non-Optimized Algorithm [9] | Optimized Algorithm [14] | Cost | |
|---|---|---|---|---|
| 360 | 0.48 deg | 11 s | 11 s | 4.27 |
| 720 | 0.24 deg | 54 s | 54 s | 2.76 |
| 1440 | 0.12 deg | 4 min | 4 min | 2.44 |
| 2880 | 0.06 deg | 14 min | 13 min | 2.16 |
| 4000 | 0.04 deg | 27 min | 26 min | 2.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferrentino, E.; Salvioli, F.; Chiacchio, P. Globally Optimal Redundancy Resolution with Dynamic Programming for Robot Planning: A ROS Implementation. Robotics 2021, 10, 42. https://doi.org/10.3390/robotics10010042
Ferrentino E, Salvioli F, Chiacchio P. Globally Optimal Redundancy Resolution with Dynamic Programming for Robot Planning: A ROS Implementation. Robotics. 2021; 10(1):42. https://doi.org/10.3390/robotics10010042
Chicago/Turabian StyleFerrentino, Enrico, Federico Salvioli, and Pasquale Chiacchio. 2021. "Globally Optimal Redundancy Resolution with Dynamic Programming for Robot Planning: A ROS Implementation" Robotics 10, no. 1: 42. https://doi.org/10.3390/robotics10010042
APA StyleFerrentino, E., Salvioli, F., & Chiacchio, P. (2021). Globally Optimal Redundancy Resolution with Dynamic Programming for Robot Planning: A ROS Implementation. Robotics, 10(1), 42. https://doi.org/10.3390/robotics10010042