The Heuristic of Directional Qualitative Semantic: A New Heuristic for Making Decisions about Spinning with Qualitative Reasoning


Abstract
1. Introduction
2. The Research Program: Multifunctional Robot on Topological Notions
- A table with the agent’s actions labeled by one of the three following relations: . The meaning of the labels depends on the kind of the reference system that represents the position of the space. For example, if it is egocentric, < means that the action causes the values of the objects to increase after it is applied, = means that the action does not cause a change in the values of the objects after it is applied, and > means that the action causes the values of the objects to decrease after it is applied.
- A set of rules to assign the corresponding TRLG to each agent and object.
- A TRLG is selected according to the size of the objects and .
- The relative topological relation between the objects and is calculated from their current positions, , and the number associated with the node of in the TRLG, , is stored.
- The number, , associated with the node of the relative topological relation that is the target between the objects and , , is obtained.
- It is checked which order relation holds between and from the following:The definitions of the relations must agree with the labeling of actions.
- It is examined at the means-ends table using the order relation that holds between and in order to select the action that is labeled with the same order relation. This is the action selected by heuristics.
3. Qualitative Reasoning about Orientation and Spinning
- A is a region of the Euclidean space .
- The environment has only two objects: a motionless object and an agent.
- The agent has two actions: spinning left and right.
3.1. Initial Assumptions
- The two-dimensional space has a Euclidean geometry. This geometry describes the physical space of our daily life.
- The agent is symmetrical, and its rotating point is the center of mass, considering the agent would have its mass distributed uniformly. This assumption is assumed because most robots have a symmetric shape, and even humans and many other animals are symmetric.
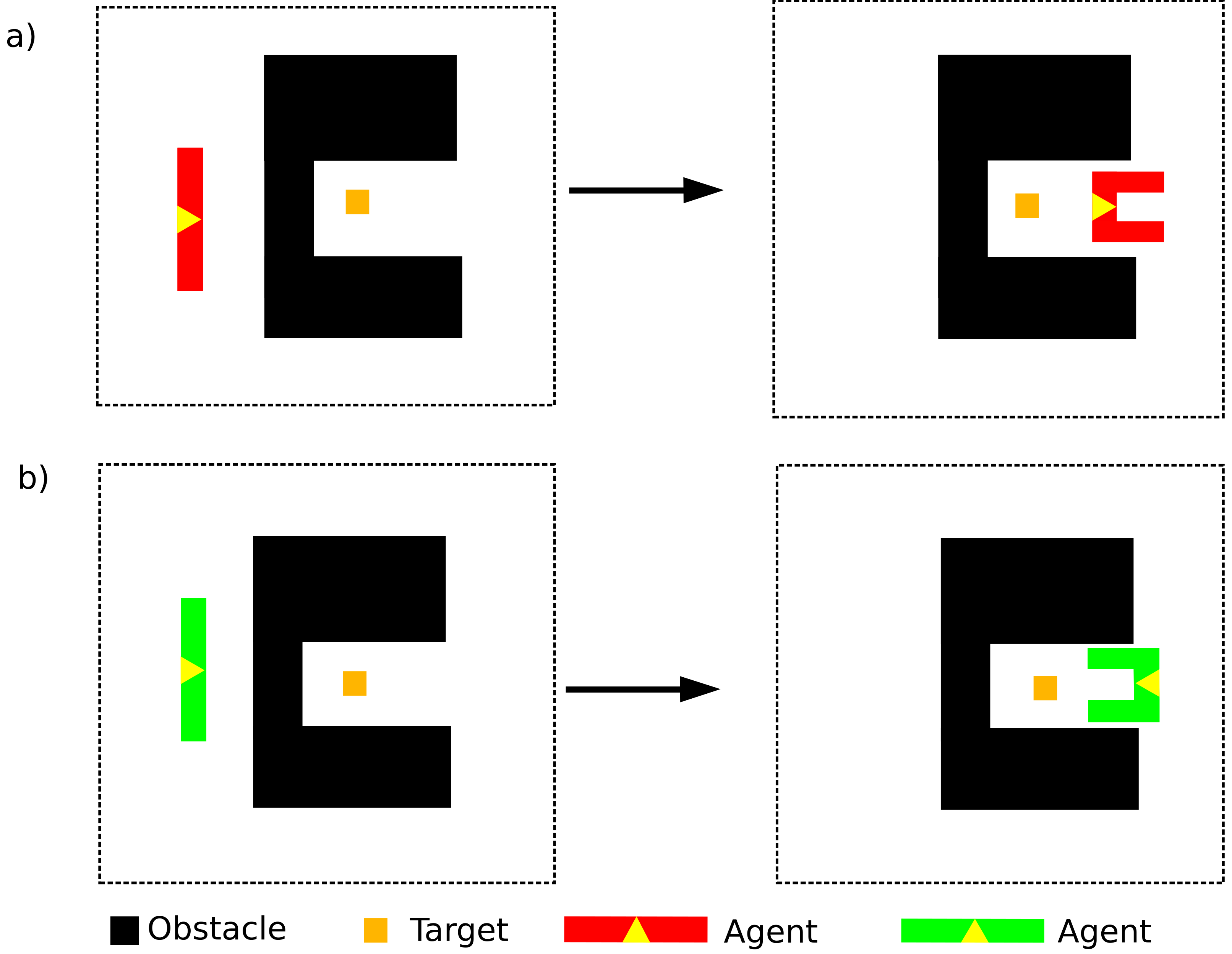
- If the object is concave, it is not surrounding the agent fully or partially. This is assumed because if an object is surrounding the agent, the concept of the direction of the object has lost its meaning and we cannot assign a direction. Therefore, the agent cannot be inside one of the cavities of another object. Because an agent in a cavity is surrounded by the object, we cannot discuss directional relation between the agent and the object. Figure 3 gives two examples of situations in which direction does and does not make sense. Instead, an agent surrounded by an object should be represented through a topological relation, as discussed in a previous article [27].
- The agent cannot collide with the object while spinning. It implies that the shortest distance from the object to the agent’s rotation point is greater than the distance from the farthest point from the agent to its rotation point.
3.2. Transforming Directional Information into Topological Information
- An agent with continuous symmetry does not modify the agent’s spatial position when it spins.
- Spinning actions modify the direction between an agent and an object, even if the agent has a continuous symmetry.
| Algorithm 1 Algorithm to calculate the Directional Topological Relation (DTR). |
| Ensure: Directional Topological Relation. |
|
3.3. Heuristic of Directional Qualitative Semantic
| Algorithm 2 Heuristic of Directional Qualitative Semantic (HDQS). |
| Ensure: A sequence of actions to establish a DTR. |
|
3.4. Selecting a Directional Topological Reasoning Graph
- , , or determine .
- determines .
- , , or determine .
- If the positional variant is + or ≈, and the relative topological relation is Disjoint-0, Meet-0, or Overlap-0, the visual system spins to the left.
- If the positional variant is + or ≈, and the relative topological relation is Overlap-1, Meet-1, or Disjoint-1, the visual system spins to the right.
- If the positional variant is −, and the relative topological relation is Disjoint-0, Meet-0, or Overlap-0, the visual system spins to the right.
- If the positional variant is +, and the relative topological relation is Overlap-1, Meet-1, or Disjoint-1, the visual system spins to the left.
- If the positional variant is +, ≈, or −, and the relative topological relation is Disjoint-0, Meet-0, or Overlap-0, the visual system spins to the left.
- If the positional variant is +, ≈, or −, and the relative topological relation is Overlap-1, Meet-1, or Disjoint-1, the visual system spins to the right.
| Algorithm 3 Algorithm to select a Directional Topological Reasoning Graph (DTRG). |
| Ensure:Directional Topological Reasoning Graph. |
|
4. Testing
5. Applying the HDQS
- Detect the lateral doors to the left and right of the agent.
- Include establishing a horizontal orientation to a lateral door as the goal to achieve in the Base of Qualitative Goals.
- Include the case without horizontal doors in the inference motor.
- Decide between using the HTQS or HDQS in accordance with the kind of goal.
6. Discussion
7. Conclusions
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CTTC | Cognitive Theory of True Conditions |
| RTR | Relative Topological Relation |
| DTR | Directional Topological Relation |
| DTRG | Directional Topological Reasoning Graph |
| HTQS | Heuristic of Topological Qualitative Semantic |
| HDQS | Heuristic of Directional Qualitative Semantic |
| MROTN | Multifunctional Robot On Topological Notions |
| TQNA | Topological Qualitative Navigation Architecture |
| TRLG | Topological Reasoning Lineal Graph |
References
- Miguel-Tomé, S. On the Identification and Establishment of Topological Spatial Relations; IWINAC 2013; Springer: Berlin/Heidelberg, Germany, 2013; Volume 2, pp. 461–470. [Google Scholar]
- Miguel-Tomé, S.; Fernández-Caballero, A. On the identification and establishment of topological spatial relations by autonomous systems. Connect. Sci. 2014, 26, 261–292. [Google Scholar] [CrossRef]
- Miguel-Tomé, S. Navigation through unknown and dynamic open spaces using topological notionst Connect. Science 2018, 30, 160–185. [Google Scholar]
- Miguel-Tomé, S. Estudio de Algoritmos de SemÁntica Cualitativa Aplicados a la Navegación. Master’s Thesis, Universidad de Castilla la Mancha, Ingeniería Informática, Albacete, Spain, 2008. [Google Scholar]
- Frank, A. Qualitative spatial reasoning about cardinal directions. In Proceedings of the 7th Austrian Conference on Artificial Intelligence, Wien, Austria, 24–27 September 1991; pp. 157–167. [Google Scholar]
- Clementini, E.; Di Felice, P.; Hernández, D. Qualitative representation of positional information. Artif. Intell. 1997, 95, 317–356. [Google Scholar] [CrossRef]
- Freksa, C. Using orientation information for qualitative spatial reasoning. In Theories and Methods of Spatio-Temporal Reasoning in Geographic Space; Springer: Berlin/Heidelberg, Germany, 1992; Volume 639, pp. 162–178. [Google Scholar]
- Goyal, R.; Egenhofer, M. The direction-relation matrix: A representation of direction relations for extended spatial objects. In Proceedings of the UCGIS Annual Assembly and Summer Retreat, Bar Harbor, ME, USA, 15–21 June 1997. [Google Scholar]
- Scivos, A.; Nebel, B. The Finest of its Class: The Natural Point-Based Ternary Calculus LR for Qualitative Spatial Reasoning. In Spatial Cognition IV. Reasoning, Action, Interaction; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3343, pp. 283–303. [Google Scholar]
- Moratz, R.; Renz, J.; Wolter, D. Qualitative Spatial Reasoning about Line Segments; ECAI 2000; IOS Press: Berlin, Germany, 2000; pp. 234–238. [Google Scholar]
- Moratz, R. Representing Relative Direction As a Binary Relation of Oriented Points. In Proceedings of the 2006 Conference on ECAI 2006, Riva del Garda, Italy, 28–29 August 2006; pp. 407–411. [Google Scholar]
- Moratz, R.; Nebel, B.; Freksa, C. Qualitative Spatial Reasoning about Relative Position. In Spatial Cognition III; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2685, pp. 385–400. [Google Scholar]
- McClelland, M.; Campbell, M.; Estlin, T. Qualitative relational mapping and navigation for planetary rovers. Robot. Auton. Syst. 2016, 83, 73–86. [Google Scholar] [CrossRef]
- Ko, D.W.; Yi, C.; Suh, I.H. Semantic mapping and navigation: A Bayesian approach. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 2630–2636. [Google Scholar]
- Schiffer, S.; Ferrein, A.; Lakemeyer, G. Reasoning with Qualitative Positional Information for Domestic Domains in the Situation Calculus. J. Intell. Robot. Syst. 2012, 66, 273–300. [Google Scholar] [CrossRef]
- De Lima, D.; Victorino, A. An image based dynamic window approach for local navigation of an autonomous vehicle in urban environments. In Proceedings of the IEEE ICRA Workshop on Modelling Estimation, Perception and Control of All Terrain Mobile Robots (WMEPC 2014), Hong Kong, China, 31 May– 7 June 2014. [Google Scholar]
- Zhu, Y.; Zhang, T.; Song, J.; Li, X.; Nakamura, M. A new method for mobile robots to avoid collision with moving obstacle. Artif. Life Robot. 2012, 16, 507–510. [Google Scholar] [CrossRef]
- Weber, H. A motion planning and execution system for mobile robots driven by stepping motors. Robot. Auton. Syst. 2000, 33, 207–221. [Google Scholar] [CrossRef]
- Dylla, F.; Wallgrün, J. Qualitative Spatial Reasoning with Conceptual Neighborhoods for Agent Control. J. Intell. Robot. Syst. 2007, 48, 55–78. [Google Scholar] [CrossRef]
- Cui, H.; Maguire, C.; LaViers, A. Laban-Inspired Task-Constrained Variable Motion Generation on Expressive Aerial Robots. Robotics 2019, 8, 24. [Google Scholar] [CrossRef]
- Miguel-Tomé, S. Principios Matemáticos del Comportamiento Natural. Ph.D. Thesis, Universidad de Salamanca, Salamanca, Spain, 2017. [Google Scholar]
- Miguel-Tomé, S. Towards a model-theoretic framework for describing the semantic aspects of cognitive processes. Adv. Distrib. Comput. Artif. Intell. J. 2020, 8, 83–96. [Google Scholar] [CrossRef]
- Miguel-Tomé, S. Principios Matemáticos del Pensamiento Natural: Teoría Cognitiva de Condiciones de Verdad; Gráficas Quintanilla: La Roda, Spain, 2006. [Google Scholar]
- Surmann, H.; Nüchter, A.; Hertzberg, J. An autonomous mobile robot with a 3D laser range finder for 3D exploration and digitalization of indoor environments. Robot. Auton. Syst. 2003, 45, 181–198. [Google Scholar] [CrossRef]
- Newman, P.; Cole, D.; Ho, K. Outdoor SLAM using visual appearance and laser ranging. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 1180–1187. [Google Scholar]
- O’ Mahony, N.; Campbell, S.; Krpalkova, L.; Riordan, D.; Walsh, J.; Murphy, A.; Ryan, C. Computer Vision for 3D Perception: A Review. Intelligent Systems and Applications. IntelliSys 2018. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2019; Volume 869, pp. 788–804. [Google Scholar]
- Miguel-Tomé, S. Extensions of the Heuristic Topological Qualitative Semantic: Enclosure and Fuzzy Relations. Robot. Auton. Syst. 2015, 63, 214–218. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Disjoint-0 | Meet-0 | Overlap-0 |
|---|---|---|
| Covers-0 | CoveredBy-0 | Inside |
| Equal | Contains | CoveredBy-1 |
| Covers-1 | Overlap-1 | Meet-1 |
| Disjoint-1 | ||
| Case | Subcase | Id | Topological Reasoning Lineal Graph |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 |
| Id | Directional Topological Reasoning Graph |
|---|---|
| Variant | Key Pairs |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miguel-Tomé, S. The Heuristic of Directional Qualitative Semantic: A New Heuristic for Making Decisions about Spinning with Qualitative Reasoning. Robotics 2021, 10, 17. https://doi.org/10.3390/robotics10010017
Miguel-Tomé S. The Heuristic of Directional Qualitative Semantic: A New Heuristic for Making Decisions about Spinning with Qualitative Reasoning. Robotics. 2021; 10(1):17. https://doi.org/10.3390/robotics10010017
Chicago/Turabian StyleMiguel-Tomé, Sergio. 2021. "The Heuristic of Directional Qualitative Semantic: A New Heuristic for Making Decisions about Spinning with Qualitative Reasoning" Robotics 10, no. 1: 17. https://doi.org/10.3390/robotics10010017
APA StyleMiguel-Tomé, S. (2021). The Heuristic of Directional Qualitative Semantic: A New Heuristic for Making Decisions about Spinning with Qualitative Reasoning. Robotics, 10(1), 17. https://doi.org/10.3390/robotics10010017