
Intruder Detection in VANET Data Streams Using Federated Learning for Smart City Environments

 , , , ,
, , , ,  and
and
Abstract

1. Introduction
1.1. Motivation
1.2. Contribution and Novelty
- We propose a VANET ID system based on DL and ensemble FL. We incorporate the idea of FL, where the ML algorithm is trained on distributed local devices or servers.
- The nature-inspired PSO algorithm is used to optimize the weight of the server in the FL approach.
- In addition, to improve the accuracy of the proposed framework, predictions from client FL models are added using the ensemble learning method.
- We use a realistic data stream called ToN-IoT, as most currently conducted studies are on the NSL-KDD and KDD-CUP99 datasets. These databases do not include recent attacks. In contrast, the ToN-IoT data stream was compiled from an IoT network of varying sizes and complexity.
1.3. Organization of the Paper
2. Related Work
- Due to their high mobility, common network medium, and lack of centrally managed security services provided by dedicated equipment such as firewalls and authentication servers, the data streams generated by VANETs are intrinsically more vulnerable to attacks than wired networks.
- Current IDSs can only detect unusual activity within a network’s subnets, not the full VANET.
- IDSs continue to face a significant problem in managing the ever-increasing volume of vehicle-related data in urban environments.
- VANETs and their integration with critical systems that need to store, send, archive, and obtain data from networks quickly are still affected by network security issues in a big way.
- Inadequate privacy protection mechanisms make it difficult for users to share information and prevent nodes from working cooperatively.
- Due to the distinctive characteristics of VANETs, such as a wide geographic scope and significant node mobility, it takes a long time to query and update the reputation score, and it is challenging to meet real-time criteria for intrusion detection.
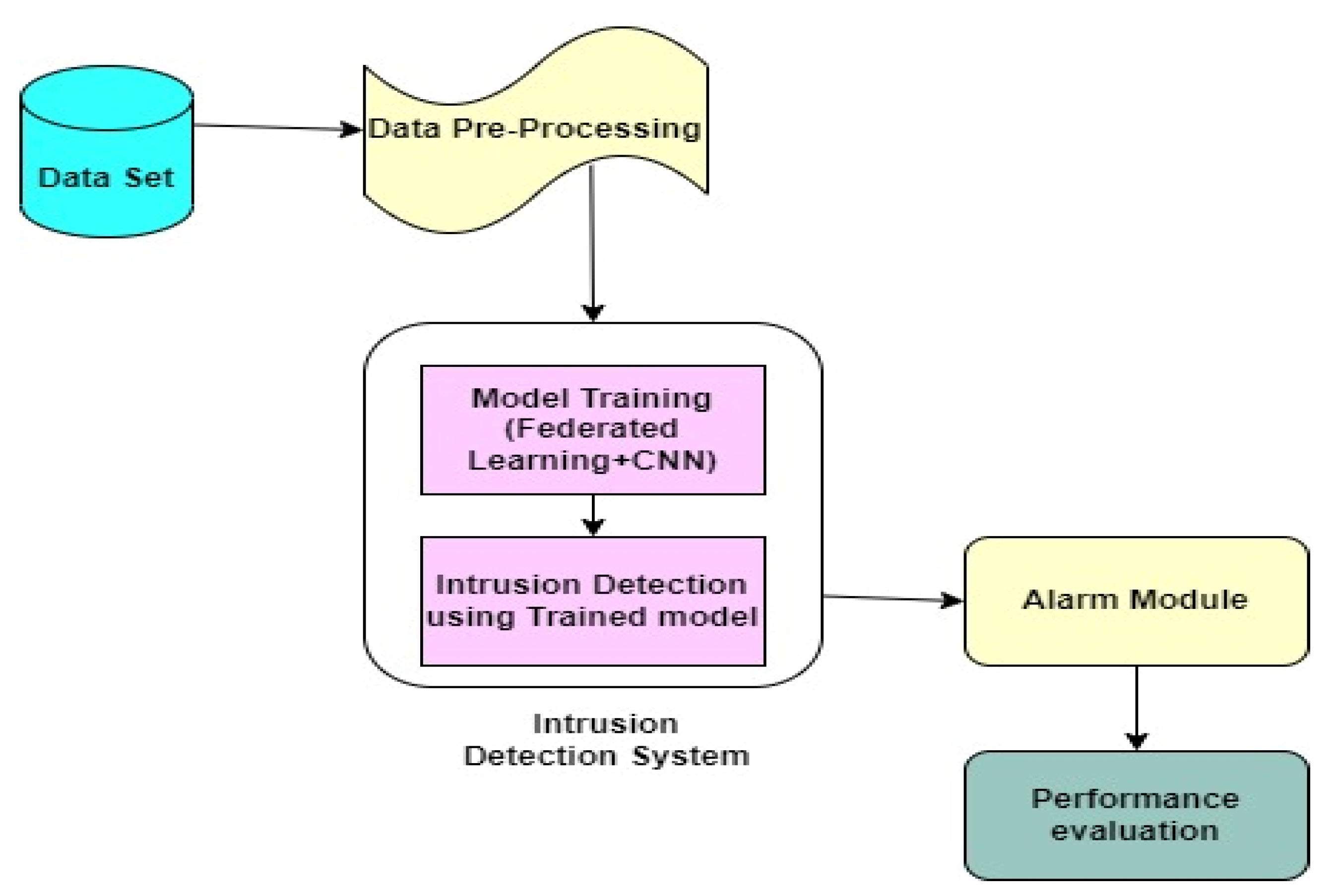
3. Proposed Framework
3.1. Stage 1—Pre-Processing the Heterogeneous Data for Individual Clients of the FL Model
3.2. Stage 2—Training of Different Client Models on Edge Devices
3.3. Stage 3—Weighted Ensemble-Based Aggregation of Client Models
3.4. Stage 4—Tuning Weight of Server Model Using PSO Optimization Algorithm
3.5. Stage 5—Alarm
3.6. Stage 6—Model Evaluation
| Algorithm 1: Algorithm for intrusion detection based on the distributed FL of heterogeneous neural networks |
| Input:, N- number of epochs, n—number of batches Output:updated weight 1: Receive from server 2: 3: for e← 1 to N, Do 4: for b ← 1 to n Do 5: 6: End 7: End 8: Send to server 9: for i ← 1 to N Do 10: for j←1 to C Do 11: 12: End 13: End 14: Optimize weighted ensembled weight using PSO optimization algorithm 15: Update the server using 16: Send the updated weight to all the clients 17: END |
4. Experiments and Results
4.1. Dataset Description
4.2. Experimental Setup
4.3. Results and Discussion
5. Conclusions and Future Scope
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Reis, J.; Marques, P.A.; Marques, P.C. Where Are Smart Cities Heading? A Meta-Review and Guidelines for Future Research. Appl. Sci. 2022, 12, 8328. [Google Scholar] [CrossRef]
- Esashika, D.; Masiero, G.; Mauger, Y. An investigation into the elusive concept of smart cities: A systematic review and meta-synthesis. Technol. Anal. Strateg. Manag. 2021, 33, 957–969. [Google Scholar] [CrossRef]
- Soyturk, M.; Muhammad, K.N.; Avcil, M.N.; Kantarci, B.; Matthews, J. From Vehicular Networks to Vehicular Clouds in Smart Cities; Elsevier Inc.: Amsterdam, The Netherlands, 2016; ISBN 9780128034637. [Google Scholar]
- Liang, W.; Li, Z.; Zhang, H.; Wang, S.; Bie, R. Vehicular Ad Hoc networks: Architectures, research issues, methodologies, challenges, and trends. Int. J. Distrib. Sens. Networks 2015, 2015, 745303. [Google Scholar] [CrossRef]
- Pattnaik, O.; Pattanayak, B.K. Security in vehicular ad hoc network based on intrusion detection system. Am. J. Appl. Sci. 2014, 11, 337–346. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M. An accurate and efficient collaborative intrusion detection framework to secure vehicular networks. Comput. Electr. Eng. 2015, 43, 33–47. [Google Scholar] [CrossRef]
- Brendan McMahan, H.; Moore, E.; Ramage, D.; Hampson, S.; Agüera y Arcas, B. Communication-efficient learning of deep networks from decentralized data. Proc. 20th Int. Conf. Artif. Intell. Stat. 2017, 54, 1273–1282. [Google Scholar]
- Uddin, M.P.; Xiang, Y.; Lu, X.; Yearwood, J.; Gao, L. Mutual Information Driven Federated Learning. IEEE Trans. Parallel Distrib. Syst. 2021, 32, 1526–1538. [Google Scholar] [CrossRef]
- Zeng, Y.; Mu, Y.; Yuan, J.; Teng, S.; Zhang, J.; Wan, J.; Ren, Y.; Zhang, Y. Adaptive Federated Learning with Non-IID Data. Comput. J. 2022. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. High-Resolution Aerial Image Labeling with Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2017, 55, 7092–7103. [Google Scholar] [CrossRef]
- Li, T.; Sahu, A.K.; Zaheer, M.; Sanjabi, M.; Talwalkar, A.; Smith, V. Federated Optimization in Heterogeneous Networks. Proc. Mach. Learn. Syst. 2018, 2, 429–450. [Google Scholar]
- Gad, A.R.; Nashat, A.A.; Barkat, T.M. Intrusion Detection System Using Machine Learning for Vehicular Ad Hoc Networks Based on ToN-IoT Dataset. IEEE Access 2021, 9, 142206–142217. [Google Scholar] [CrossRef]
- Qi, H.; Xiao, S.; Shi, R.; Ward, M.O.; Chen, Y.; Tu, W.; Su, Q.; Wang, W.; Wang, X.; Zhang, Z. Enhanced Reader.pdf. Nature 2018, 388, 539–547. [Google Scholar]
- Adhikary, K.; Bhushan, S.; Kumar, S.; Dutta, K. Hybrid Algorithm to Detect DDoS Attacks in VANETs. Wirel. Pers. Commun. 2020, 114, 3613–3634. [Google Scholar] [CrossRef]
- Mohammed AL Zamil, S.S. Applications of Data Mining Techniques for Vehicular Ad hoc Networks. arXiv 2018, arXiv:1807.02564. [Google Scholar]
- Khan, M.A.; Kim, J. Toward developing efficient Conv-AE-based intrusion detection system using heterogeneous dataset. Electronics 2020, 9, 1771. [Google Scholar] [CrossRef]
- Alshammari, A.; Zohdy, M.A.; Debnath, D.; Corser, G. Classification Approach for Intrusion Detection in Vehicle Systems. Wirel. Eng. Technol. 2018, 9, 79–94. [Google Scholar] [CrossRef]
- Shu, J.; Zhou, L.; Zhang, W.; Du, X.; Guizani, M. Collaborative Intrusion Detection for VANETs: A Deep Learning-Based Distributed SDN Approach. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4519–4530. [Google Scholar] [CrossRef]
- Bangui, H.; Ge, M.; Buhnova, B. A hybrid machine learning model for intrusion detection in VANET. Computing 2022, 104, 503–531. [Google Scholar] [CrossRef]
- Bangui, H.; Ge, M.; Buhnova, B. A hybrid data-driven model for intrusion detection in VANET. Procedia Comput. Sci. 2021, 184, 516–523. [Google Scholar] [CrossRef]
- Zhang, T.; Zhu, Q. Distributed Privacy-Preserving Collaborative Intrusion Detection Systems for VANETs. IEEE Trans. Signal Inf. Process. Networks 2018, 4, 148–161. [Google Scholar] [CrossRef]
- Zeng, Y.; Qiu, M.; Ming, Z.; Liu, M. Senior2Local: A Machine Learning Based Intrusion Detection Method for VANETs; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; Volume 11344, ISBN 9783030057541. [Google Scholar]
- Zeng, Y.; Qiu, M.; Zhu, D.; Xue, Z.; Xiong, J.; Liu, M. DeepVCM: A Deep Learning Based Intrusion Detection Method in VANET. In Proceedings of the 2019 IEEE 5th Intl Conference on Big Data Security on Cloud (BigDataSecurity), IEEE Intl Conference on High Performance and Smart Computing, (HPSC) and IEEE Intl Conference on Intelligent Data and Security (IDS), Washington, DC, USA, 27–29 May 2019; pp. 288–293. [Google Scholar] [CrossRef]
- Yu, Y.; Zeng, X.; Xue, X.; Ma, J. LSTM-Based Intrusion Detection System for VANETs: A Time Series Classification Approach to False Message Detection. IEEE Trans. Intell. Transp. Syst. 2022, 23, 23906–23918. [Google Scholar] [CrossRef]
- Braga, D.C. Field Drilling Data Cleaning and Preparation for Data Analytics Applications. Master’s Thesis, Louisiana State University and Agricultural & Mechanical College, Baton Rouge, LA, USA, 2019. [Google Scholar]
- Jana, G.; Mitra, A.; Pan, S.; Sural, S.; Chattaraj, P.K. Modified Particle Swarm Optimization Algorithms for the Generation of Stable Structures of Carbon Clusters, Cn (n = 3–6, 10). Front. Chem. 2019, 7, 485. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Dataset Used | Methodology | Evaluation Parameters | ||||
|---|---|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F1 Score | Others | ||||
| Shu, J. et al. [18] | 2020 | KDD99 dataset | The authors suggested installing a distributed SDN controller on each base station to create a cooperative intrusion detection system based on distributed SDN. | Y | Y | Y | Y | Y |
| Bangui, H. et al. [19] | 2022 | CICIDS2017 dataset | For the purpose of addressing real-time attack detection in VANETs, authors put out a hybrid machine learning model for intrusion detection. The model uses an unsupervised clustering approach based on coresets to filter out unknown attacks and the random forest as a classifier to identify well-known attacks. | Y | Y | Y | Y | - |
| Bangui, H. et al. [20] | 2021 | CICIDS2017 | Authors suggested a hybrid machine learning technique to carry out thorough intrusion detection in VANETs effectively. The suggested approach combines coresets-based clustering and data categorization. It makes use of coresets to reduce overhead in computational time consumption and improve IDS inference capabilities in VANETs. | Y | - | - | Y | Y |
| Zhang, T. et al. [21] | 2018 | NSL-KDD data | The authors suggested a collaborative IDS (PML-CIDS) for VANETs that protects user privacy using machine learning. The suggested algorithm trains a classifier to recognise intrusions in VANETs and applies the alternating direction method of multipliers to a class of empirical risk minimization issues. | Y | - | - | - | Y |
| Zeng, Y. et al. [22] | 2018 | - | Senior2Local, a unique ML-based intrusion detection approach for VANETs, was presented by the authors. They utilized game theory to develop a system of trust for RSUs. ANN is implemented using a model based on dependable RSUs in order to secure CHs. After deleting malicious CHs, a lightweight SVM is employed to detect cluster-to-cluster harmful MPRs. | Y | - | - | - | Y |
| Zeng, Y. et al. [23] | 2019 | NS-3 VANET simulated dataset and ISCX 2012 IDS dataset | A deep learning (DL)-based end-to-end intrusion detection system was proposed by the authors in order to automatically detect malware traffic for OBUs. In contrast to earlier intrusion detection techniques, the suggested method just needs raw traffic, not human-extracted private information attributes. | - | Y | Y | Y | - |
| Yu, Y. et al. [24] | 2022 | Time series dataset | To improve false emergency message detection, authors presented a time series classification and deep learning-based IDS. A classifier based on long short-term memory (LSTM) is built and trained to determine whether the emergency message is authentic or not. | Y | - | - | Y | Y |
| Model | Training Accuracy | Testing Accuracy | Precision | Recall | F1 Score | FPR |
|---|---|---|---|---|---|---|
| Linear Regression | 0.868 | 0.766 | 0.760 | 0.856 | 0.833 | 0.12 |
| Naïve Bayes | 0.668 | 0.388 | 0.412 | 0.946 | 0.661 | 0.78 |
| Decision Tree | 0.981 | 0.791 | 0.893 | 0.967 | 0.942 | 0.03 |
| Random Forest | 0.980 | 0.854 | 0.941 | 0.935 | 0.942 | 0.04 |
| K-NN | 0.989 | 0.86 | 0.897 | 0.971 | 0.955 | 0.005 |
| Support Vector Machine | 0.869 | 0.665 | 0.854 | 0.853 | 0.813 | 0.135 |
| Proposed Approach | 0.994 | 0.981 | 0.974 | 0.995 | 0.987 | 0.008 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arya, M.; Sastry, H.; Dewangan, B.K.; Rahmani, M.K.I.; Bhatia, S.; Muzaffar, A.W.; Bivi, M.A. Intruder Detection in VANET Data Streams Using Federated Learning for Smart City Environments. Electronics 2023, 12, 894. https://doi.org/10.3390/electronics12040894
Arya M, Sastry H, Dewangan BK, Rahmani MKI, Bhatia S, Muzaffar AW, Bivi MA. Intruder Detection in VANET Data Streams Using Federated Learning for Smart City Environments. Electronics. 2023; 12(4):894. https://doi.org/10.3390/electronics12040894
Chicago/Turabian StyleArya, Monika, Hanumat Sastry, Bhupesh Kumar Dewangan, Mohammad Khalid Imam Rahmani, Surbhi Bhatia, Abdul Wahab Muzaffar, and Mariyam Aysha Bivi. 2023. "Intruder Detection in VANET Data Streams Using Federated Learning for Smart City Environments" Electronics 12, no. 4: 894. https://doi.org/10.3390/electronics12040894
APA StyleArya, M., Sastry, H., Dewangan, B. K., Rahmani, M. K. I., Bhatia, S., Muzaffar, A. W., & Bivi, M. A. (2023). Intruder Detection in VANET Data Streams Using Federated Learning for Smart City Environments. Electronics, 12(4), 894. https://doi.org/10.3390/electronics12040894