Precise Positioning of Autonomous Vehicles Combining UWB Ranging Estimations with On-Board Sensors



Abstract
1. Introduction
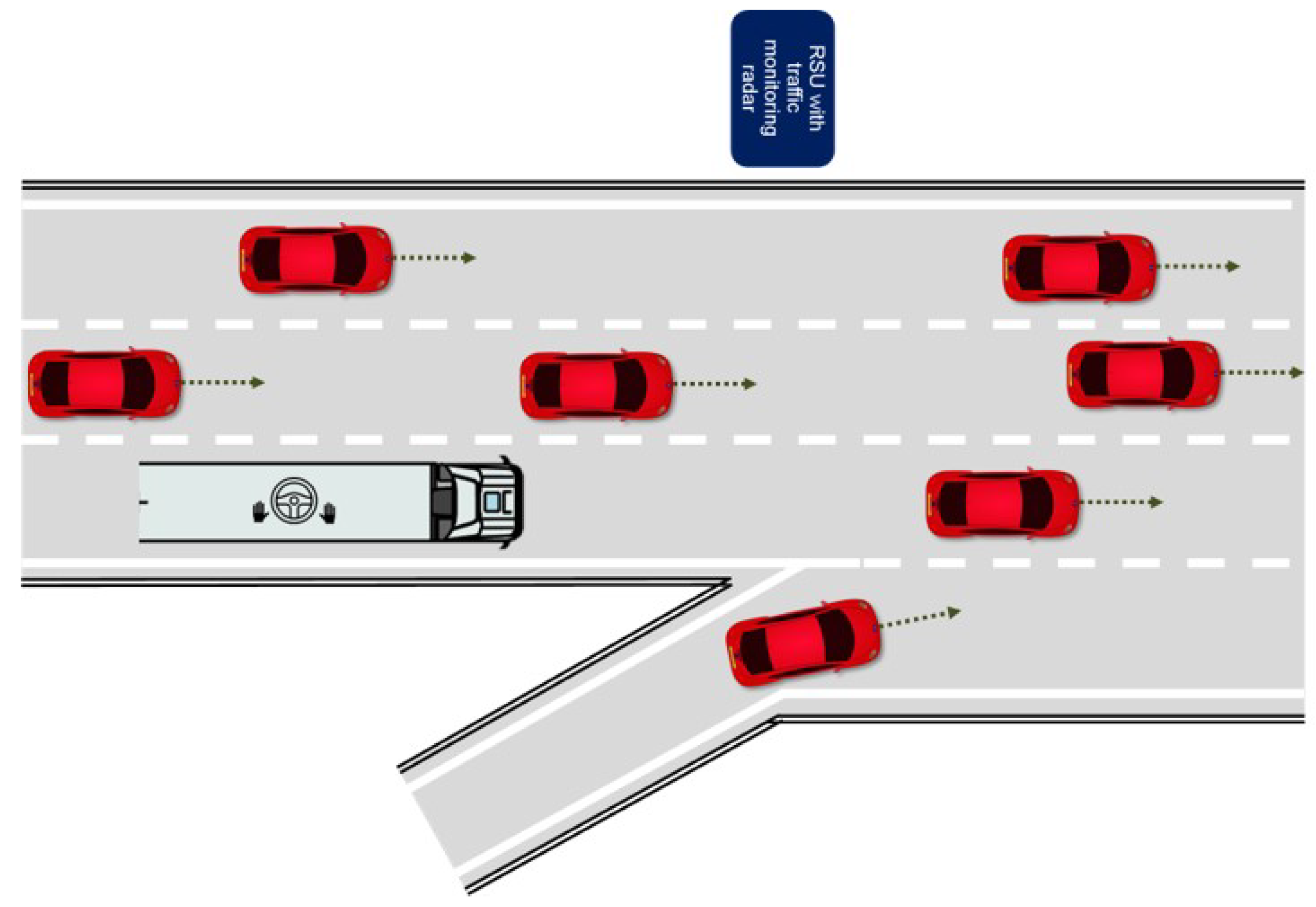
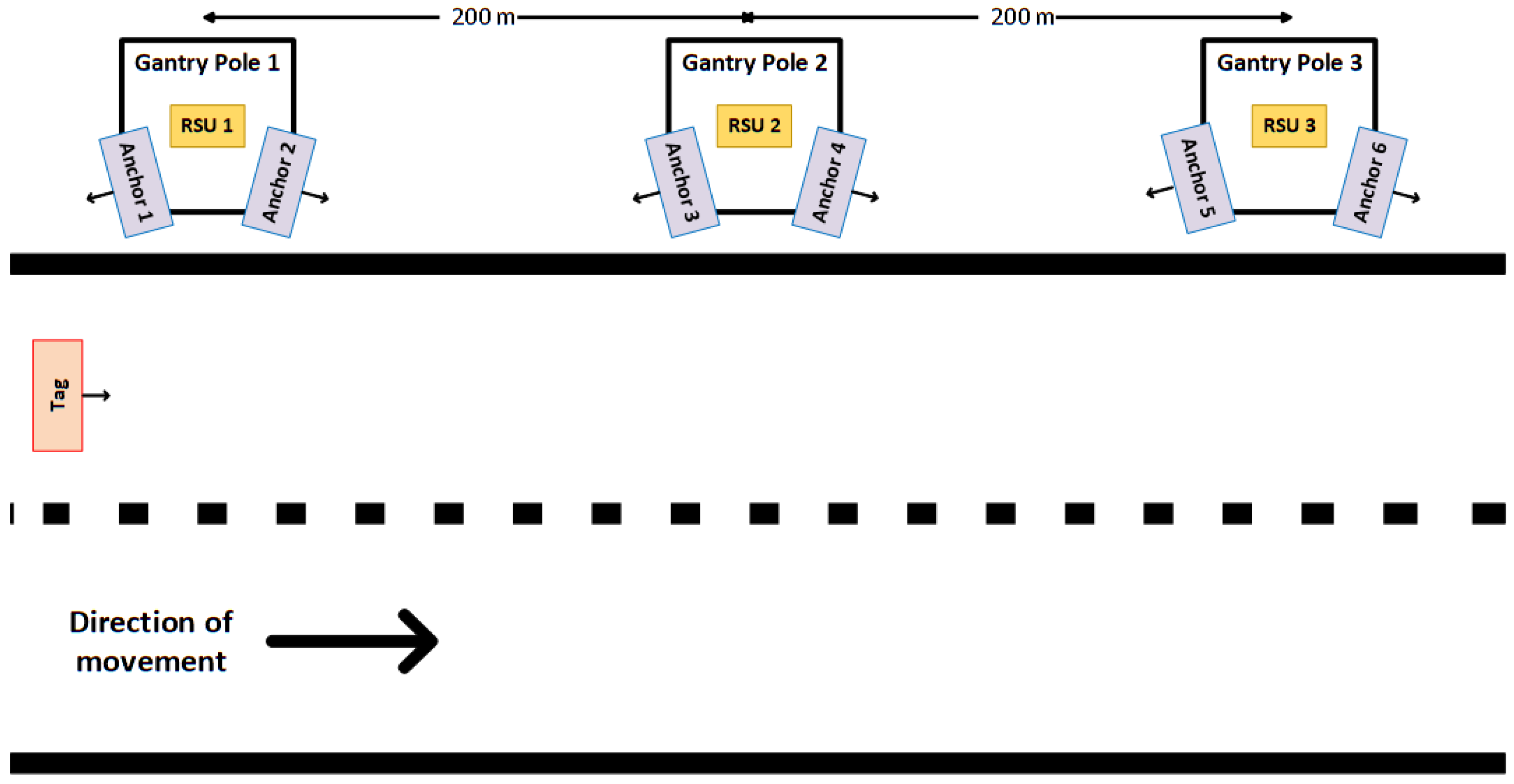
- Equip the Road Side Units (RSUs) located aside the roads with UWB fixed nodes for redundancy and robustness in areas where the coverage of GNSS is poor. These ranging units will allow the automated vehicle to calculate its distance to known points on the road.
- Development of an accurate and robust positioning solution based on the data fusion of UWB ranging estimates together with inertial and odometry data. This solution enhances the vehicle’s positioning in those environments where the GNSS signal reception is limited or impossible.
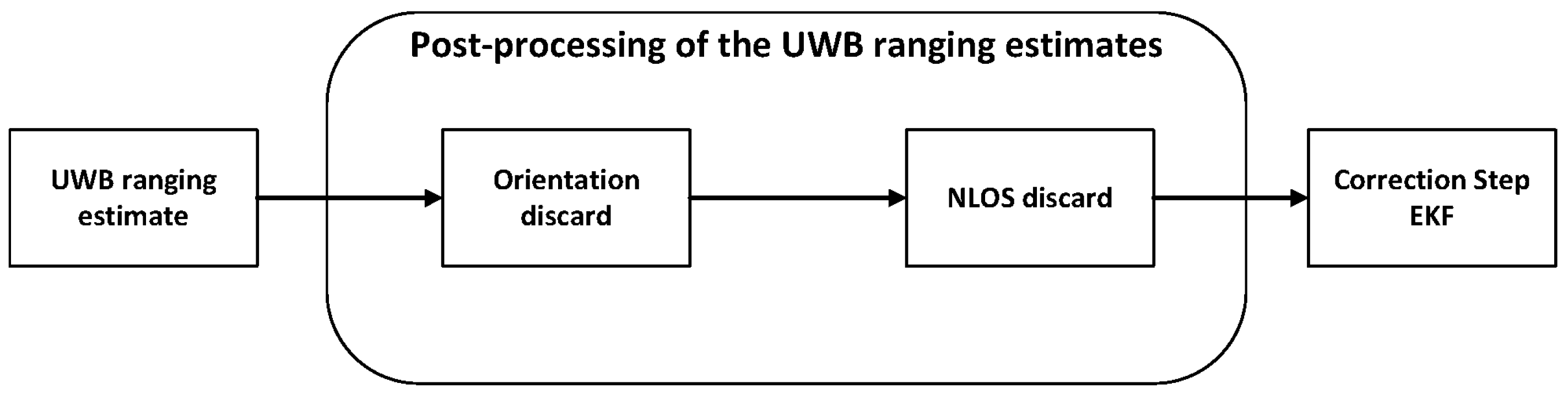
- An Extended Kalman Filter (EKF) has been built for fusing the UWB ranging estimates with the on-board data of the vehicle. Moreover, an algorithm for post-processing the UWB ranging estimates has also been developed. The combination of both algorithms computes an accurate and reliable position over time, enhancing the individual performance of the different data sources.
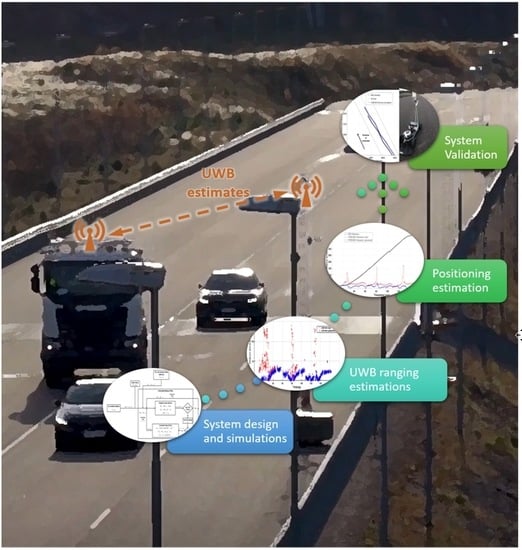
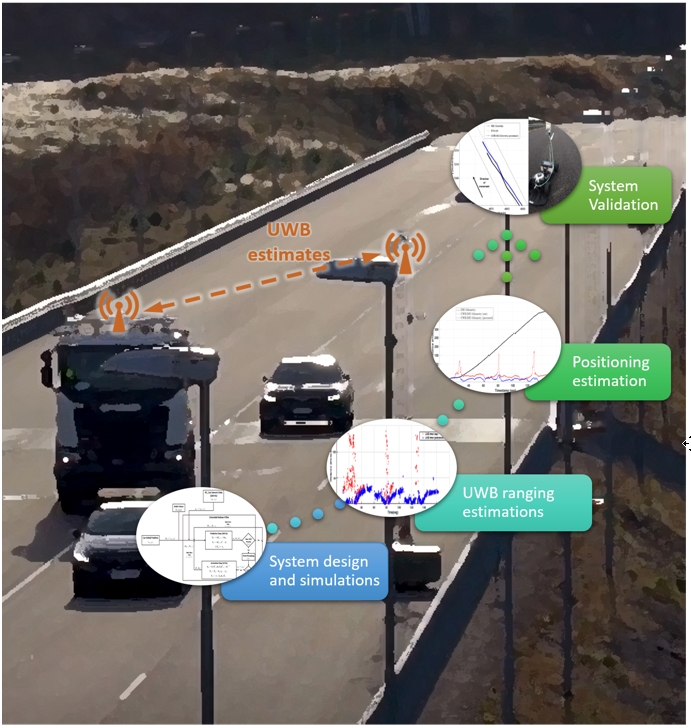
- Validation of the proposed solution by different tests performed in both a simulated environment and a real environment. On the one hand, the simulations have been carried out for proving the correct operation of the proposed solution in its initial design. On the other hand, the real tests have been carried out on the Astazero proving ground [13] in Sweden, using a relevant setup for the PRoPART use case. For these tests, a Radio Control car (RC car) developed by RISE (Research Institutes of Sweden) has been used as testing platform.
- Accurate UWB sensor based on an external antenna connected through a cable to achieve a flexible deployment of our solution. To our best of knowledge, none of the research works found in the literature proposes such a flexible solution.
2. Related Work
2.1. Introduction
2.2. Precise Outdoor Positioning
3. Methodology and Experimental Procedure
3.1. Methodology
3.2. Experimental Procedure
- Step 1: use of a dynamic platform simulator to design the algorithms for fusing the data coming from UWB sensors, odometry and IMU.
- Step 2: use a vehicle, an RC-Car, to collect data in a real and representative scenario to validate the proposed positioning system.
3.3. Step 1: Dynamic Platform Simulator
3.4. Step 2: Radio Control Car
4. Design of the Outdoor Positioning System
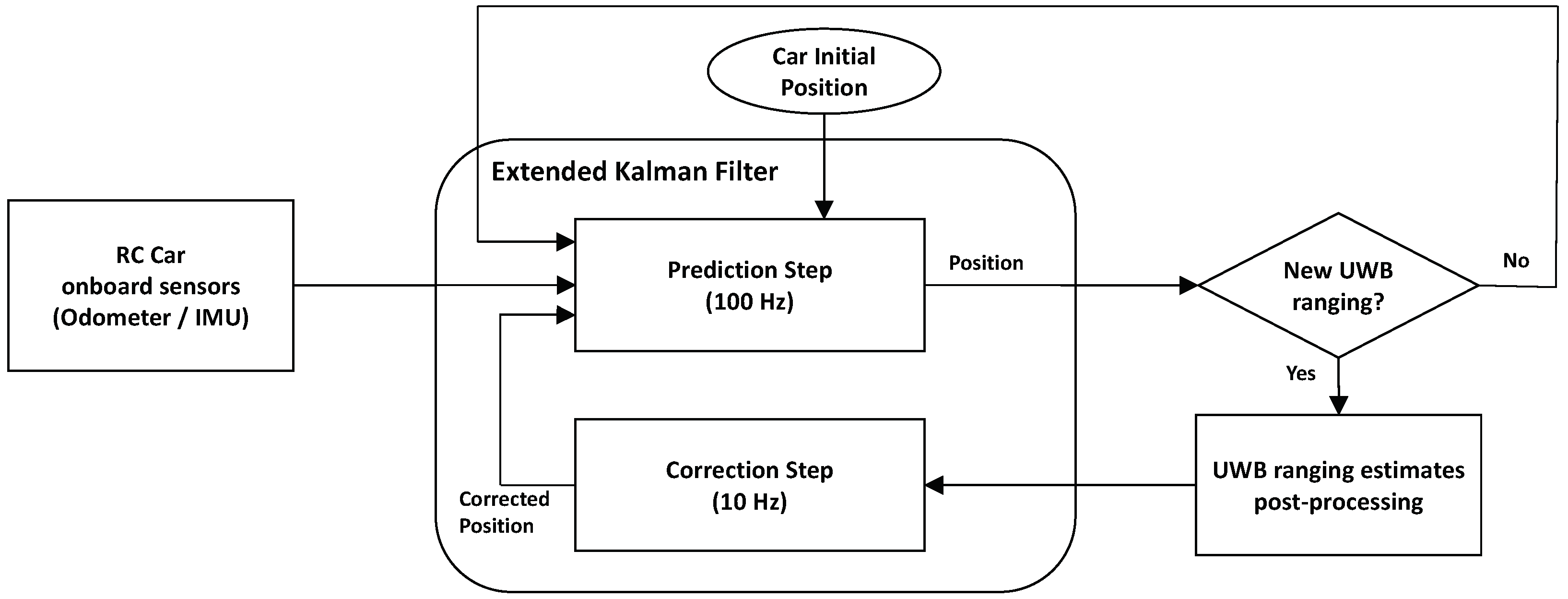
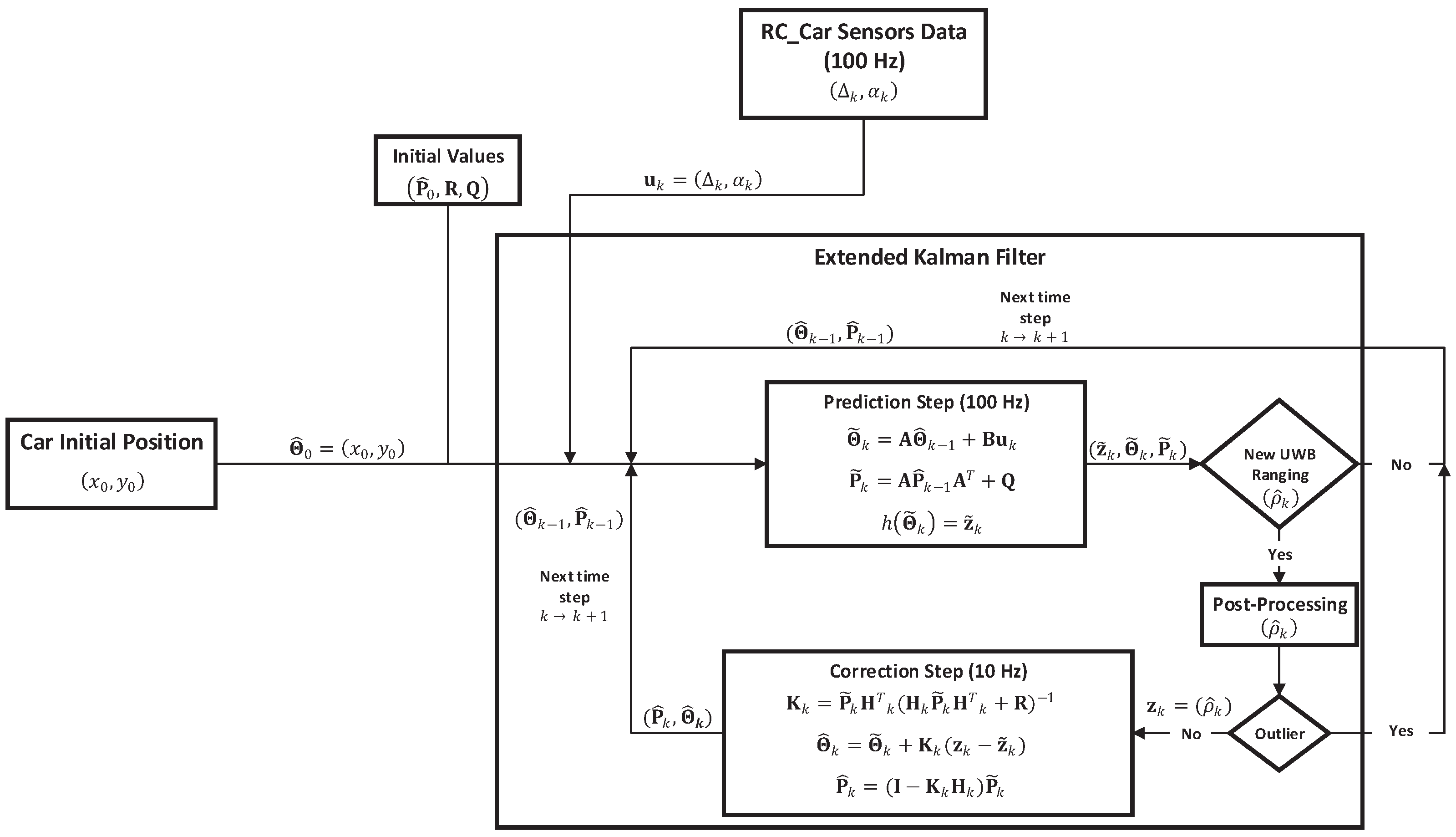
- Updating the RC car position. This is carried out in the prediction step of the EKF. This step is applied each time new odometry and inertial data of the RC car on-board sensors arrive into the system, resulting in a new position of the RC car. Note that the data of the RC car on-board sensors are generated at a data rate of 100 Hz, indicating that every 10 ms the prediction step of the EKF is applied.
- Correcting the RC car position. This is accomplished in the correction step of the EKF. This step is applied each time a new UWB ranging estimate arrives into the system, correcting the last position of the RC car computed in the prediction step. The main idea when correcting periodically the position computed by the prediction step is to bound its positioning error over time. Note that the UWB ranging estimates are generated at a data rate of 10 Hz, indicating that every 100 ms the correction step of the EKF is applied.
4.1. Proposed Extended Kalman Filter
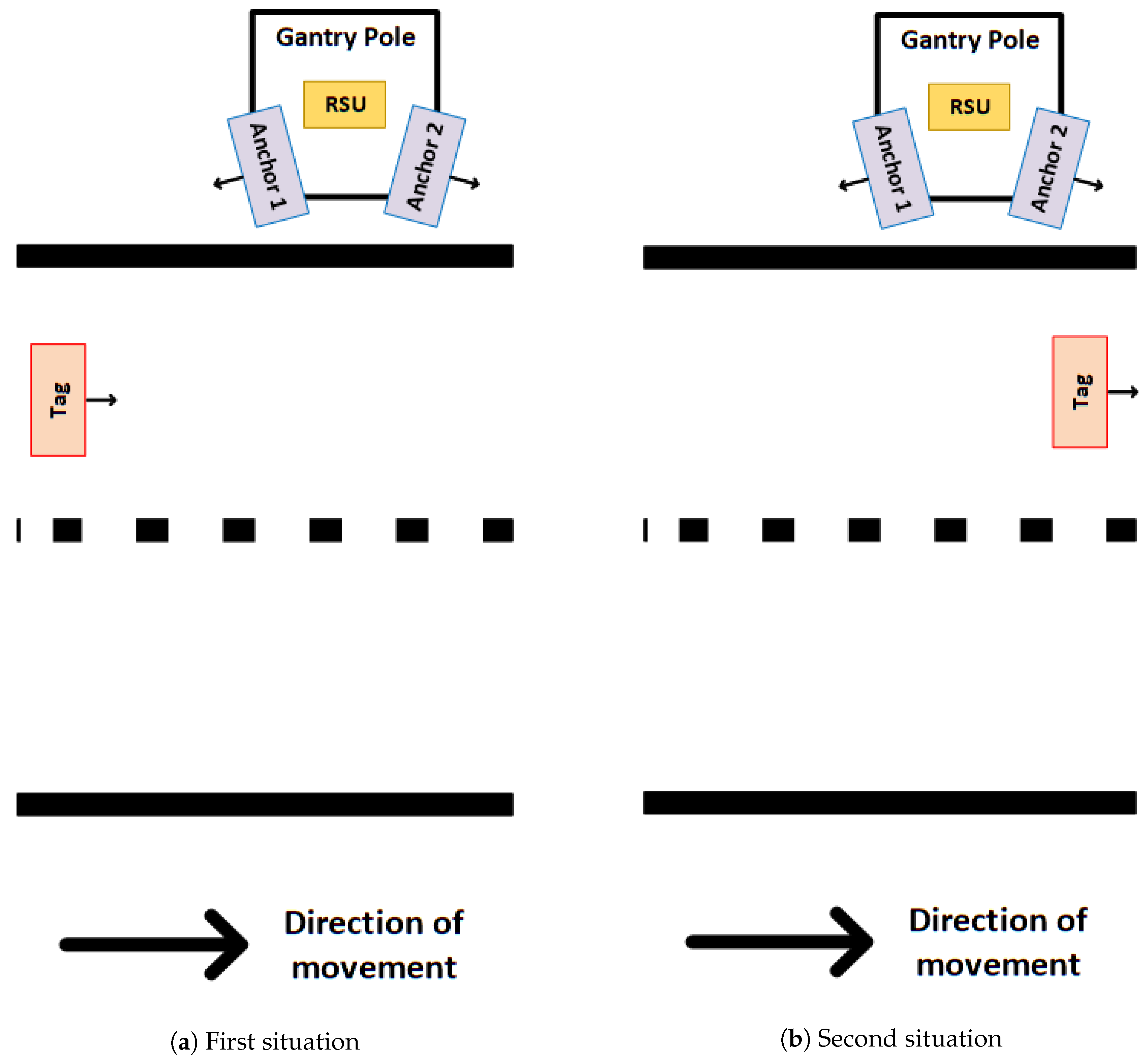
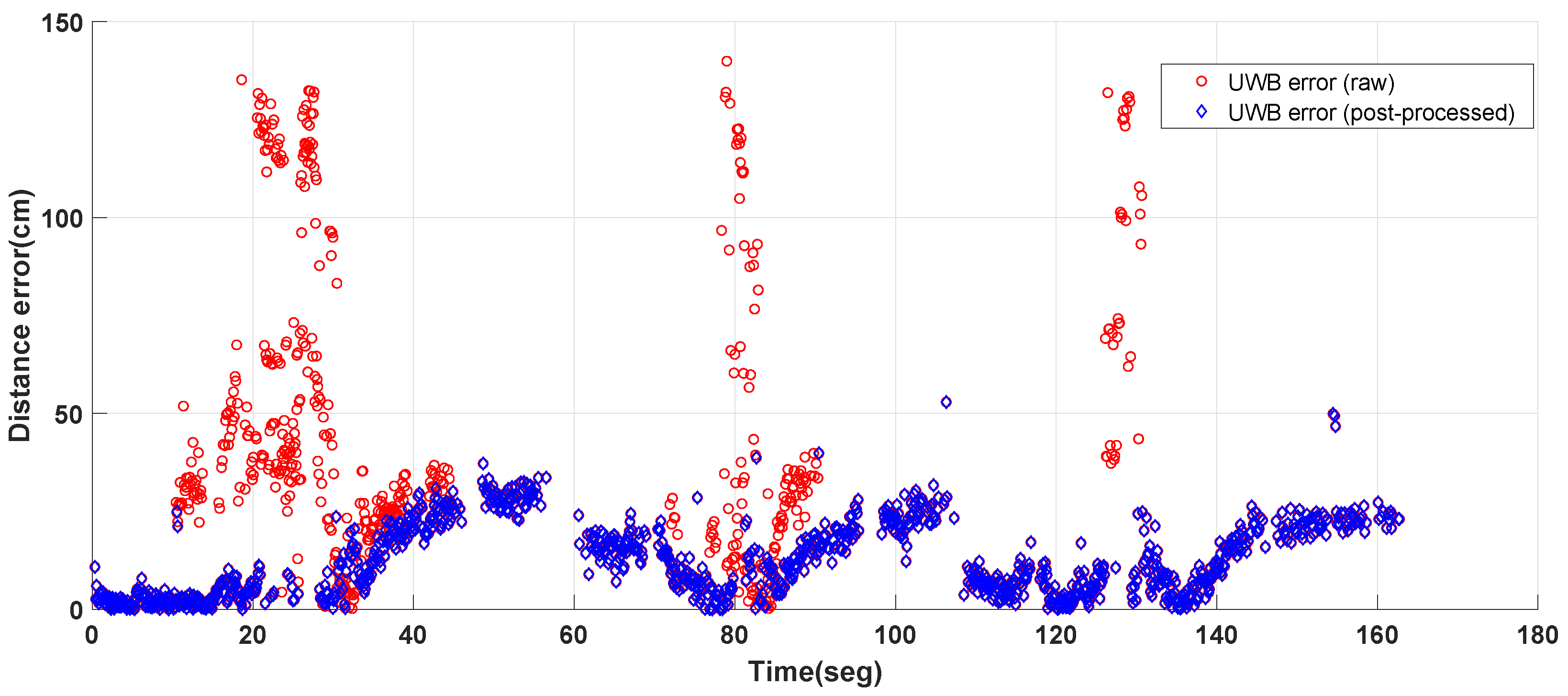
4.2. Proposed Algorithm for Post-Processing the UWB Ranging Estimates
5. Experiments and Results
5.1. Propart Use Case
5.2. Real Tests Setup
5.3. Tests Results
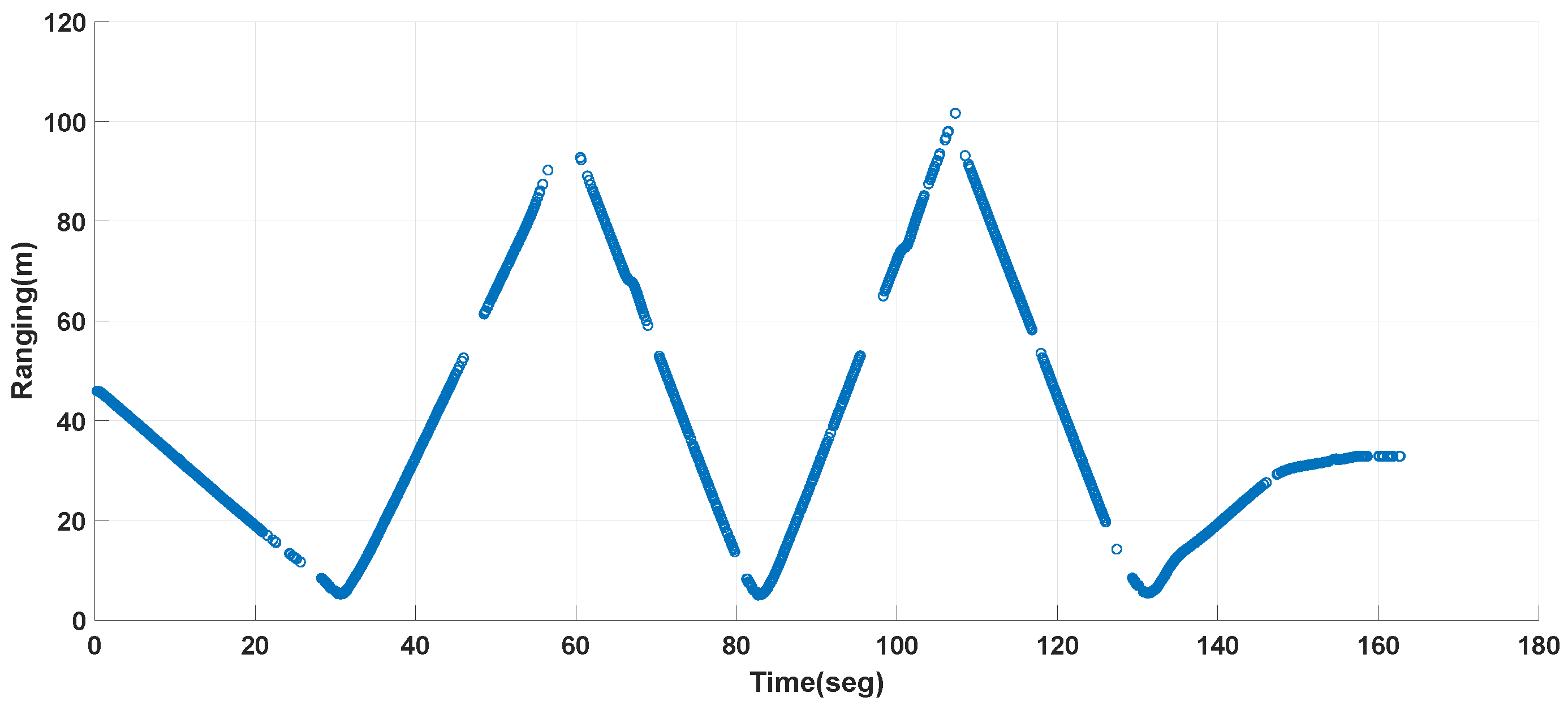
5.3.1. UWB Ranging Estimates
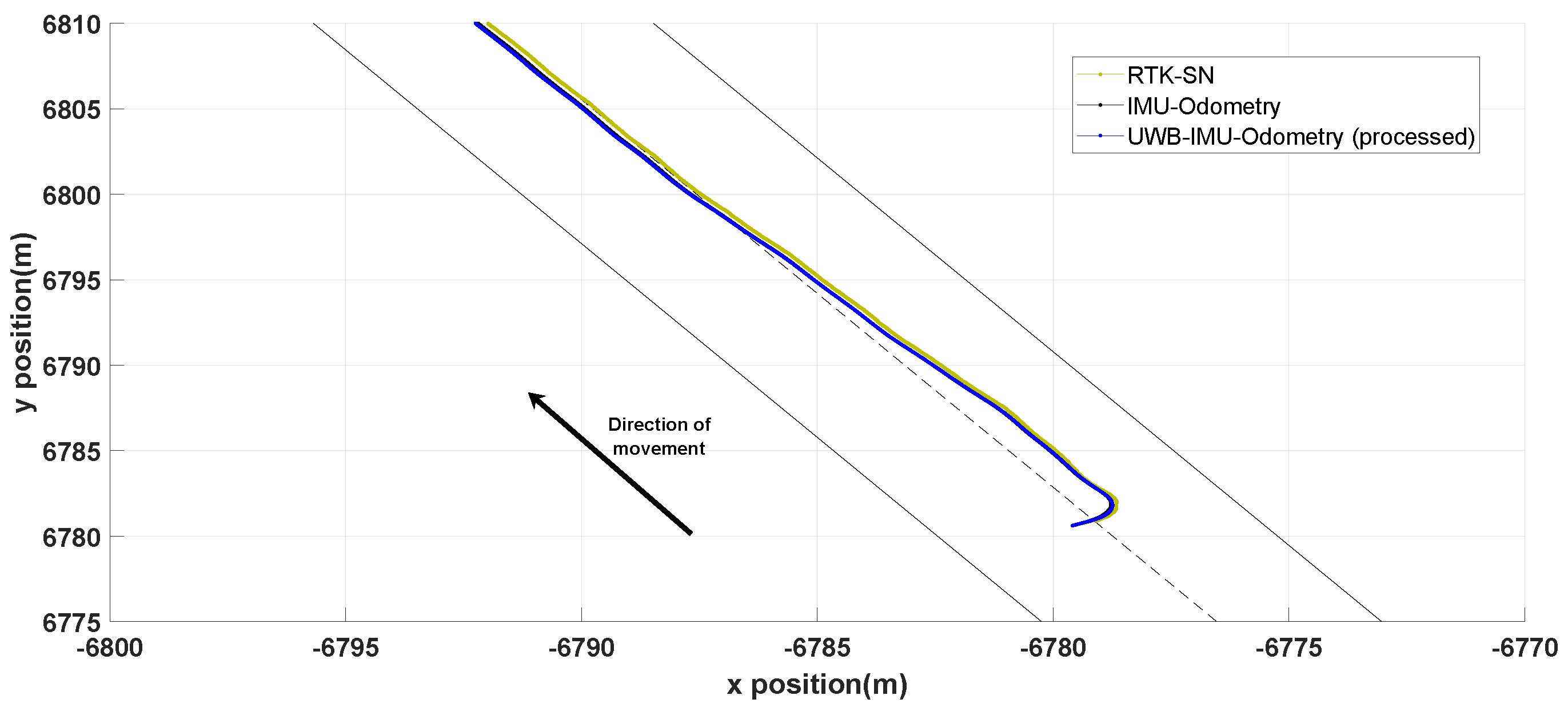
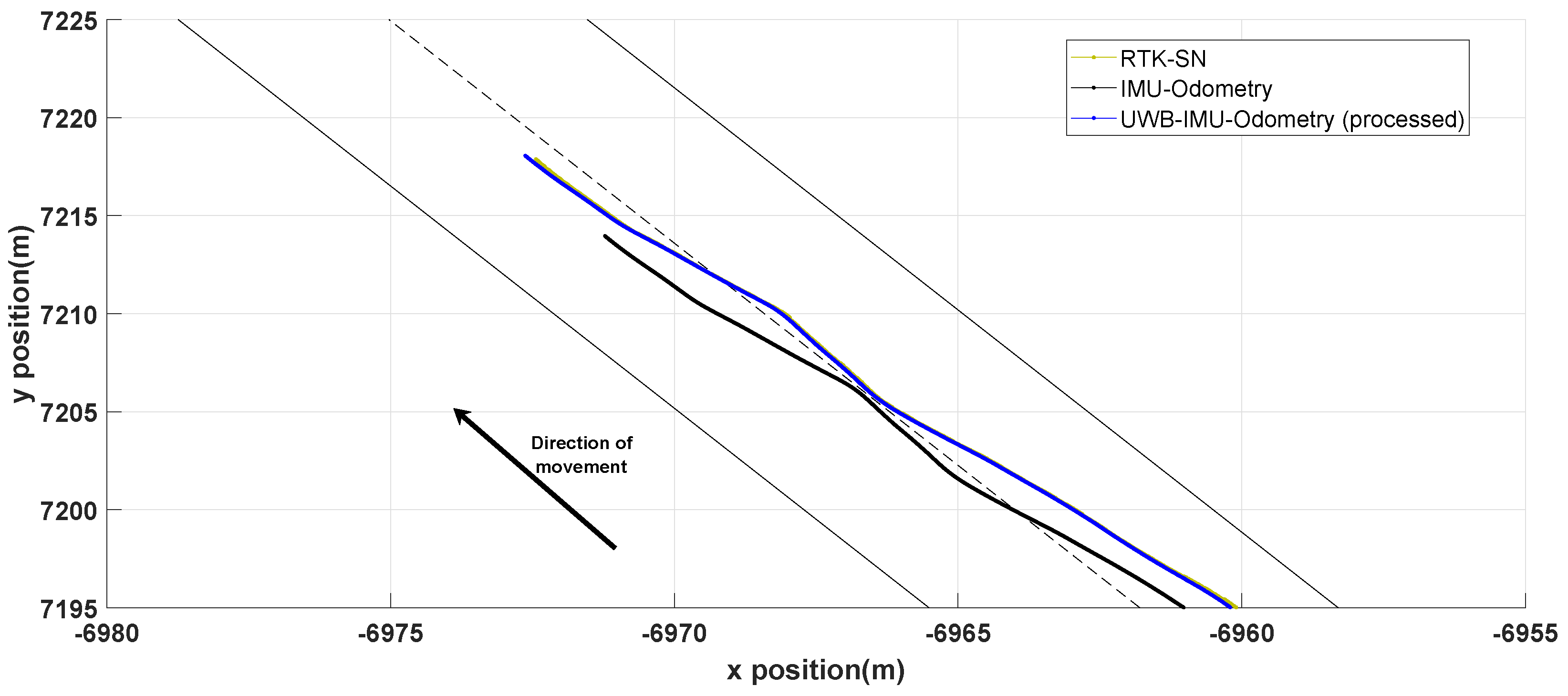
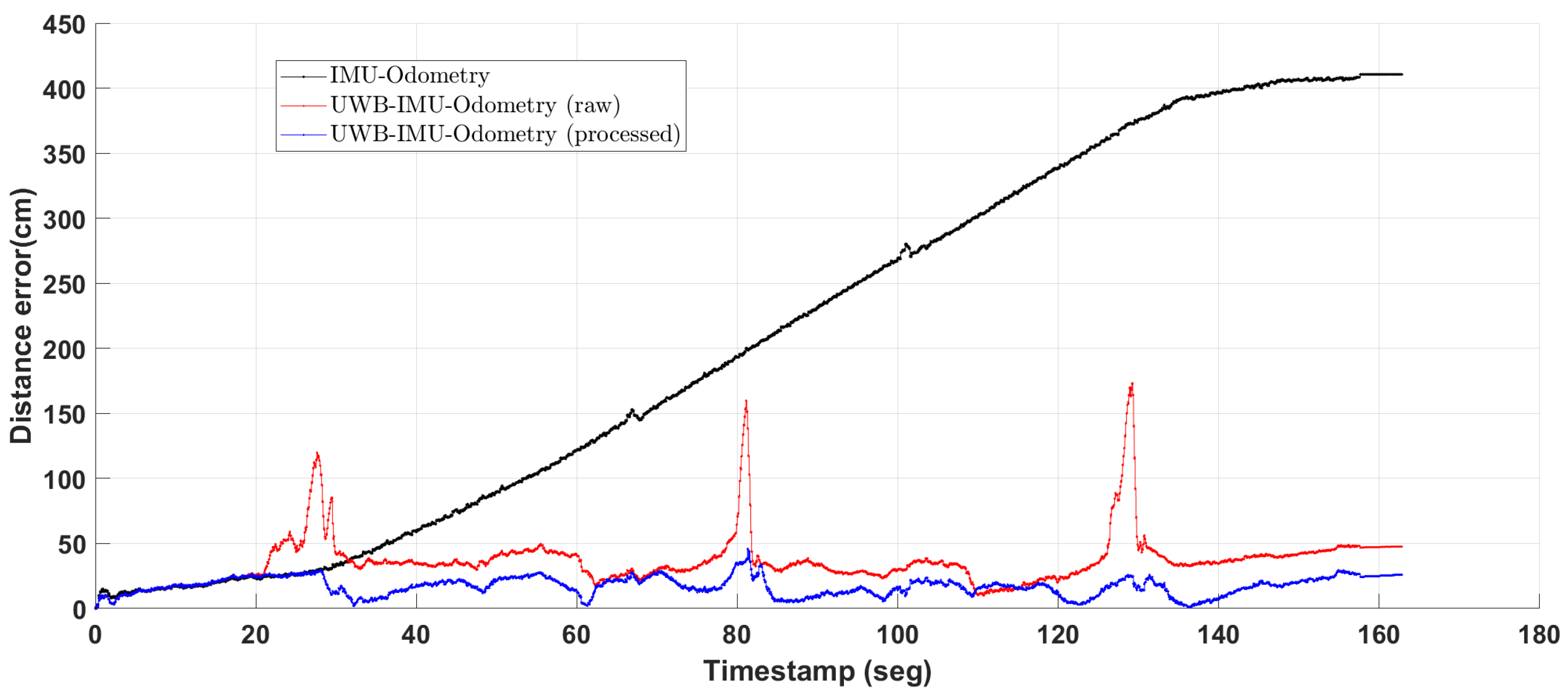
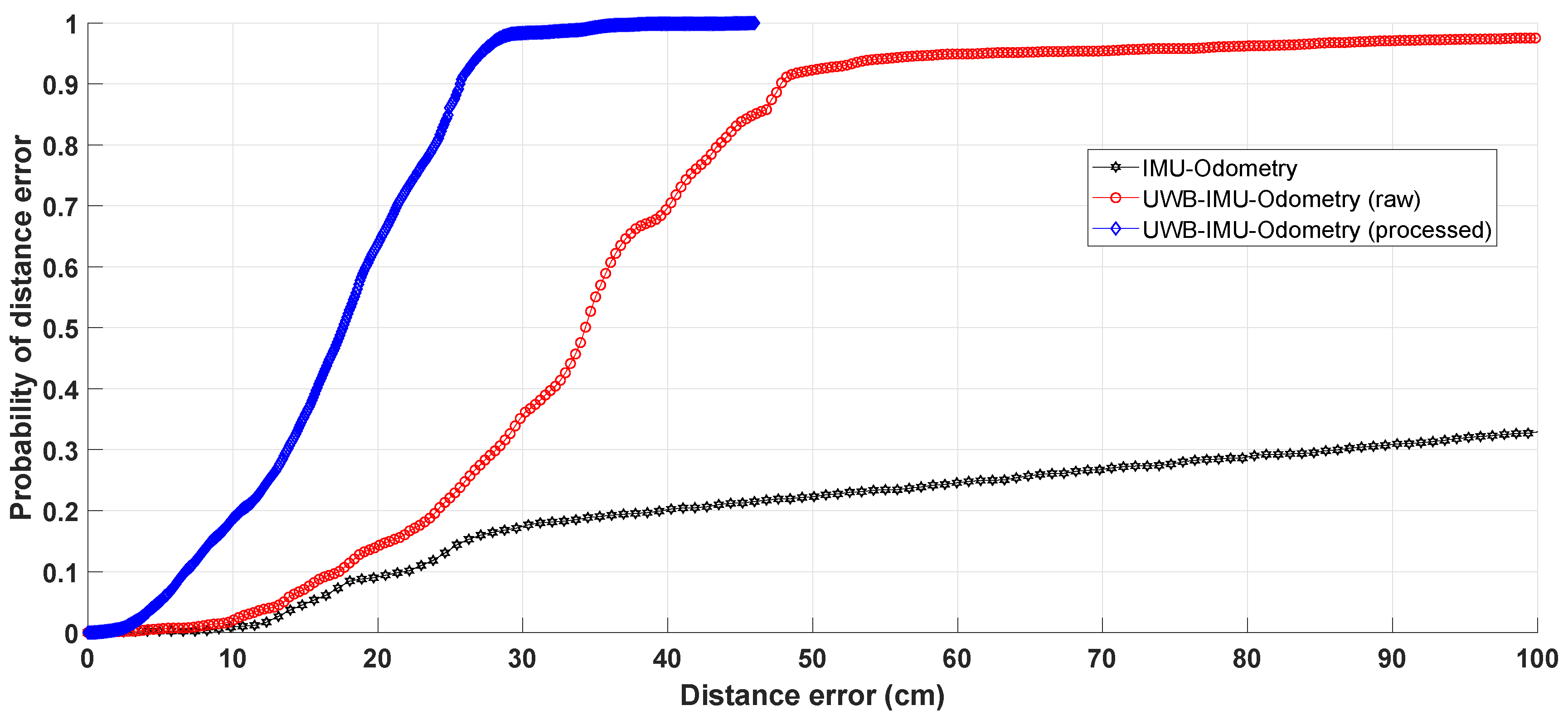
5.3.2. Positioning
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AKF | Adaptive Kalman Filter |
| CDF | Cumulative Distribution Function |
| EKF | Extended Kalman Filter |
| Fc | Central Frequency |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IMU | Inertial Measurement Unit |
| INS | Inertial Navigation System |
| IPS | Indoor Positioning System |
| KF | Kalman Filter |
| LOS | Line-of-Sight |
| NLOS | Non Line-of-Sight |
| PAKF | Predictive Adaptive Kalman Filter |
| PDR | Pedestrian Dead Reckoning |
| PRF | Pulse Repetition Frequency |
| RC car | Radio Control car |
| RISE | Research Institutes of Sweden |
| RKF | Robust Kalman Filter |
| RTK | Real Time Kinematic |
| RMSE | Root Mean Square Error |
| RSU | Road Side Unit |
| RTK-SN | Real-Time Kinematic Satellite Navigation |
| SHFAF | Sage-Husa fuzzy adaptive filter |
| UKF | Unscented Kalman Filter |
| UWB | Ultra-Wideband |
| V2V | Vehicle-to-Vehicle |
| V2X | Vehicle-to-Everything |
References
- Bimbraw, K. Autonomous cars: Past, present and future a review of the developments in the last century, the present scenario and the expected future of autonomous vehicle technology. In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Colmar, Alsace, France, 21–23 July 2015. [Google Scholar]
- De Miguel, G.; Goya, J.; Fernández, N.; Arrizabalaga, S.; Mendizabal, J.; Adin, I. Map-Aided Software Enhancement for Autonomous GNSS Complementary Positioning System for Railway. IEEE Trans. Veh. Technol. 2019, 64, 11611–11620. [Google Scholar] [CrossRef]
- Federal Communications Commission of the United States. Revision of Part 15 of the Commission’s Rules Regarding Ultrawideband Transmission Systems; First Report (Order 02-48, ET Docket FCC 02-8); U.S. Federal Communications Commission: Washington, DC, USA, 2002; pp. 98–153.
- Dierenbach, K.; Ostrowski, S.; Jozkow, G.; Toth, C.K.; Grejner-Brzezinska, D.A.; Koppanyi, Z. UWB for Navigation in GNSS Compromised Environments. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015. [Google Scholar]
- Wang, J.; Gao, Y.; Li, Z.; Meng, X.; Hancock, C.M. A Tightly-Coupled GPS/INS/UWB Cooperative Positioning Sensors System Supported by V2I Communication. Sensors 2016, 19, 944. [Google Scholar] [CrossRef] [PubMed]
- Yao, L.; Wu, Y.W.A.; Yao, L.; Liao, Z.Z. An Integrated IMU and UWB sensor Based Indoor Positioning System. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Liu, J.; Pu, J.; Sun, L.; He, Z. An Approach to Robust INS/UWB Integrated Positioning for Autonomous Indoor Mobile Robots. Sensors 2019, 19, 950. [Google Scholar] [CrossRef] [PubMed]
- Guosheng, W.; Shuqi, Q.; Qiang, L.; Heng, W.; Huican, L.; Bing, L. UWB and IMU System Fusion for Indoor Navigation. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018. [Google Scholar]
- Fan, Q.; Jia, J.; Pan, P.; Zhang, H.; Sun, Y. An improved INS/PDR/UWB integrated positioning method for indoor foot-mounted pedestrians. Sens. Rev. 2019, 39, 318–331. [Google Scholar] [CrossRef]
- Shunkai, S.; Hu, J.; Li, J.; Liu, R.; Shu, M.; Yang, Y. An INS-UWB based collision avoidance system for AGVs. Algorithms 2019, 12, 40–51. [Google Scholar]
- Xu, Y.; Shen, T.; Chen, X.Y.; Bu, L.L.; Feng, N. Predictive Adaptive Kalman Filter and Its Application to INS/UWB-integrated Human Localization with Missing UWB-based Measurements. Int. J. Autom. Comput. 2018, 16, 604–613. [Google Scholar] [CrossRef]
- Benini, A.; Mancini, A.; Longhi, S. An IMU/UWB/vision-based extended kalman filter for mini-UAV localization in indoor environment using 802.15.4a wireless sensor network. J. Intell. Robot. Syst. Theory Appl. 2018, 70, 461–476. [Google Scholar] [CrossRef]
- AstaZero AB—Testing Active Safety. Available online: https://www.astazero.com/ (accessed on 15 March 2020).
- Petovello, M.G.; O’Keefe, K.; Chan, B.; Spiller, B.S.; Pedrosa, C.; Xie, P.; Basnayake, C. Demonstration of inter-vehicle UWB ranging to augment DGPS for improved relative positioning. J. Glob. Position. Syst. 2012, 11, 11–21. [Google Scholar] [CrossRef]
- Tanigawa, M.; Hol, J.D.; Dijkstra, F.; Luinge, H.; Slycke, P. Augmentation of low-cost GPS/MEMS INS with UWB positioning system for seamless outdoor/indoor positioning. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- DChiu, S.; MacGougan, G.; O’Keefe, K. Multiple UWB Range Assisted GPS RTK in Hostile Environments. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Cadenas, L.Z. Radiofrequency-Based Indoor Location Systems for Ambient Assisted Living Applications. Ph.D. Thesis, University of Navarra, Pamplona, Spain, 2014. [Google Scholar]
- Vedde, B.; Svensson, J.; Vinter, J.; Magnus, J. Automated Testing of Ultrawideband Positioning for Autonomous Driving. J. Robot. 2020, 2020, 9345360. [Google Scholar]
- Vedder, B.; Vinter, J.; Jonsson, M. A Low-Cost Model Vehicle Testbed with Accurate Positioning for Autonomous Driving. J. Robot. 2018, 2018, 4907536. [Google Scholar] [CrossRef]
- Nord, S.; Dietmayer, K.; Tidd, J.; Cortés, A.; Zamora, L.; Varadi, A. PRoPART—Precise and Robust Positioning for Automated Road Transports. In Proceedings of the 25th KA and Broadband Communications Conference, Sorrento, Italy, 30 September–2 October 2019. [Google Scholar]
- DW1000 Radio IC. Available online: https://www.decawave.com/product/dw1000-radio-ic/ (accessed on 15 March 2020).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Outdoor App. | Motion App. | Sensor Fusion | Fusion Alg. | Validation | Real Time Pos. |
|---|---|---|---|---|---|---|
| [6] | No | Yes | UWB/ IMU | 8 state-EKF | Real/ Simulations | Yes |
| [7] | No | Yes | UWB/ INS | SHFAF | Real/ Simulations | Yes |
| [8] | No | Yes | UWB/ IMU | EKF/UKF | Real | Yes |
| [4] | Yes | Yes | UWB/ IMU | EKF | Real | Yes |
| [5] | Yes | Yes | GPS/UWB/ IMU | RKF | Real | No |
| [9] | No | Yes | INS/PDR/ UWB | AKF | Real | Yes |
| [10] | No | Yes | INS/ UWB | EKF | Real | Yes |
| [11] | No | Yes | INS/ UWB | PAKF | Real/ Simulations | Yes |
| [12] | No | Yes | INS/Vision/ UWB | EKF | Simulations | Yes |
| [14] | Yes | Yes | GPS/UWB/ Bearing (V2V) | EKF | Real | Yes |
| [15] | Indoor/Outdoor | Yes | GPS/INS/ UWB | KF | Real | Yes |
| [16] | Yes | Yes | GPS/ UWB | KF | Real | Yes |
| Channel | Fc | Bandwidth | Preamble | Preamble | PRF | Data | Max Mean |
|---|---|---|---|---|---|---|---|
| Length | Code | Rate | Spectral Density | ||||
| 5 | 6489.6 MHz | 500 MHz | 128 symbols | 3 | 16 MHz | 6.8 Mbps | −41.3 dBm/MHz |
| Pos.System | |||||
|---|---|---|---|---|---|
| IMU-Odometry | 205 cm | 142.8 cm | 249.8 cm | 407.3 cm | 410.6 cm |
| UWB-IMU-Odometry (raw) | 36.1 cm | 20.2 cm | 41.4 cm | 61.4 cm | 173.4 cm |
| UWB-IMU-Odometry (processed) | 17.2 cm | 7.1 cm | 18.6 cm | 27.1 cm | 46 cm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
San Martín, J.; Cortés, A.; Zamora-Cadenas, L.; Svensson, B.J. Precise Positioning of Autonomous Vehicles Combining UWB Ranging Estimations with On-Board Sensors. Electronics 2020, 9, 1238. https://doi.org/10.3390/electronics9081238
San Martín J, Cortés A, Zamora-Cadenas L, Svensson BJ. Precise Positioning of Autonomous Vehicles Combining UWB Ranging Estimations with On-Board Sensors. Electronics. 2020; 9(8):1238. https://doi.org/10.3390/electronics9081238
Chicago/Turabian StyleSan Martín, Javier, Ainhoa Cortés, Leticia Zamora-Cadenas, and Bo Joel Svensson. 2020. "Precise Positioning of Autonomous Vehicles Combining UWB Ranging Estimations with On-Board Sensors" Electronics 9, no. 8: 1238. https://doi.org/10.3390/electronics9081238
APA StyleSan Martín, J., Cortés, A., Zamora-Cadenas, L., & Svensson, B. J. (2020). Precise Positioning of Autonomous Vehicles Combining UWB Ranging Estimations with On-Board Sensors. Electronics, 9(8), 1238. https://doi.org/10.3390/electronics9081238