Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller





Abstract
1. Introduction
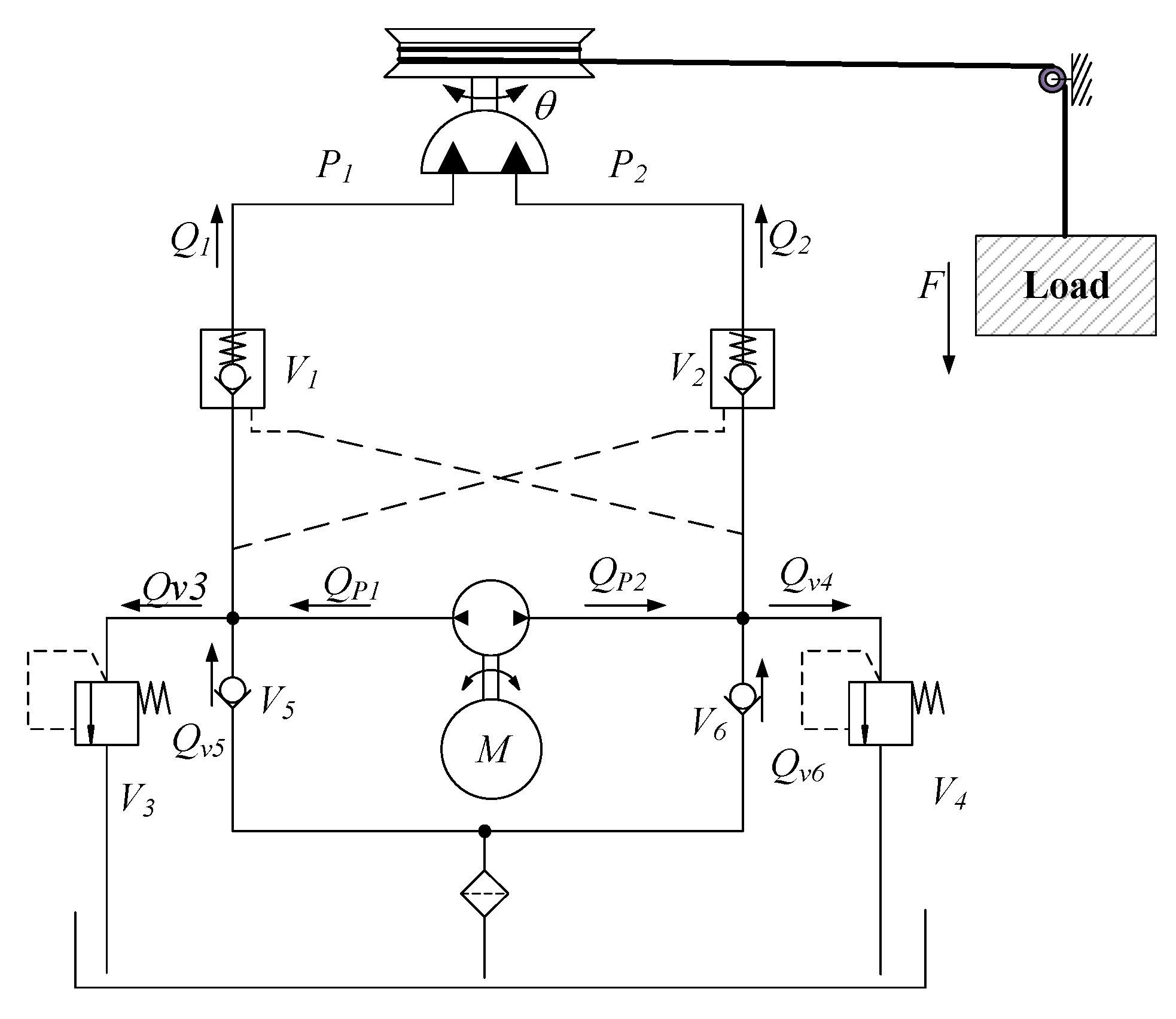
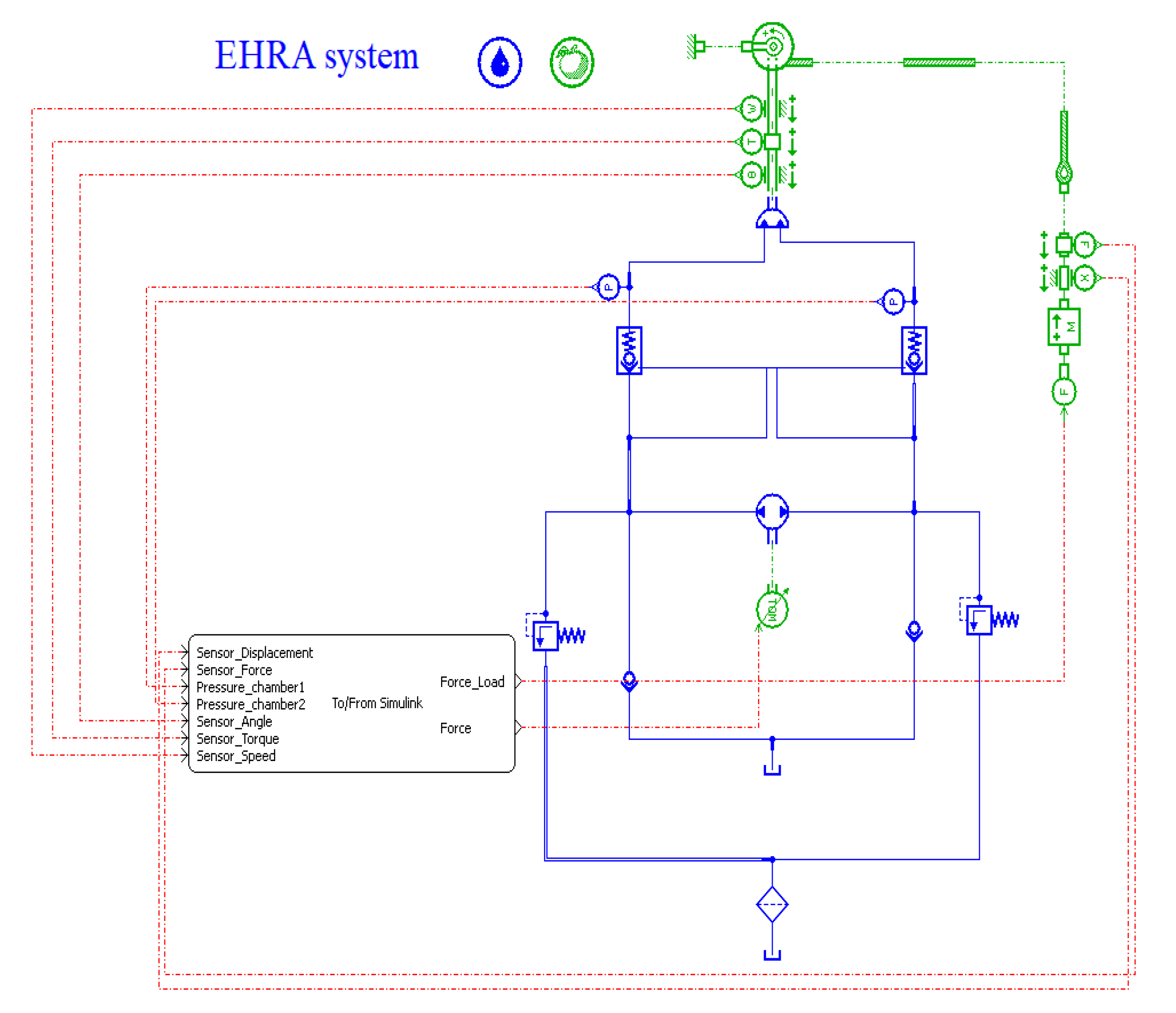
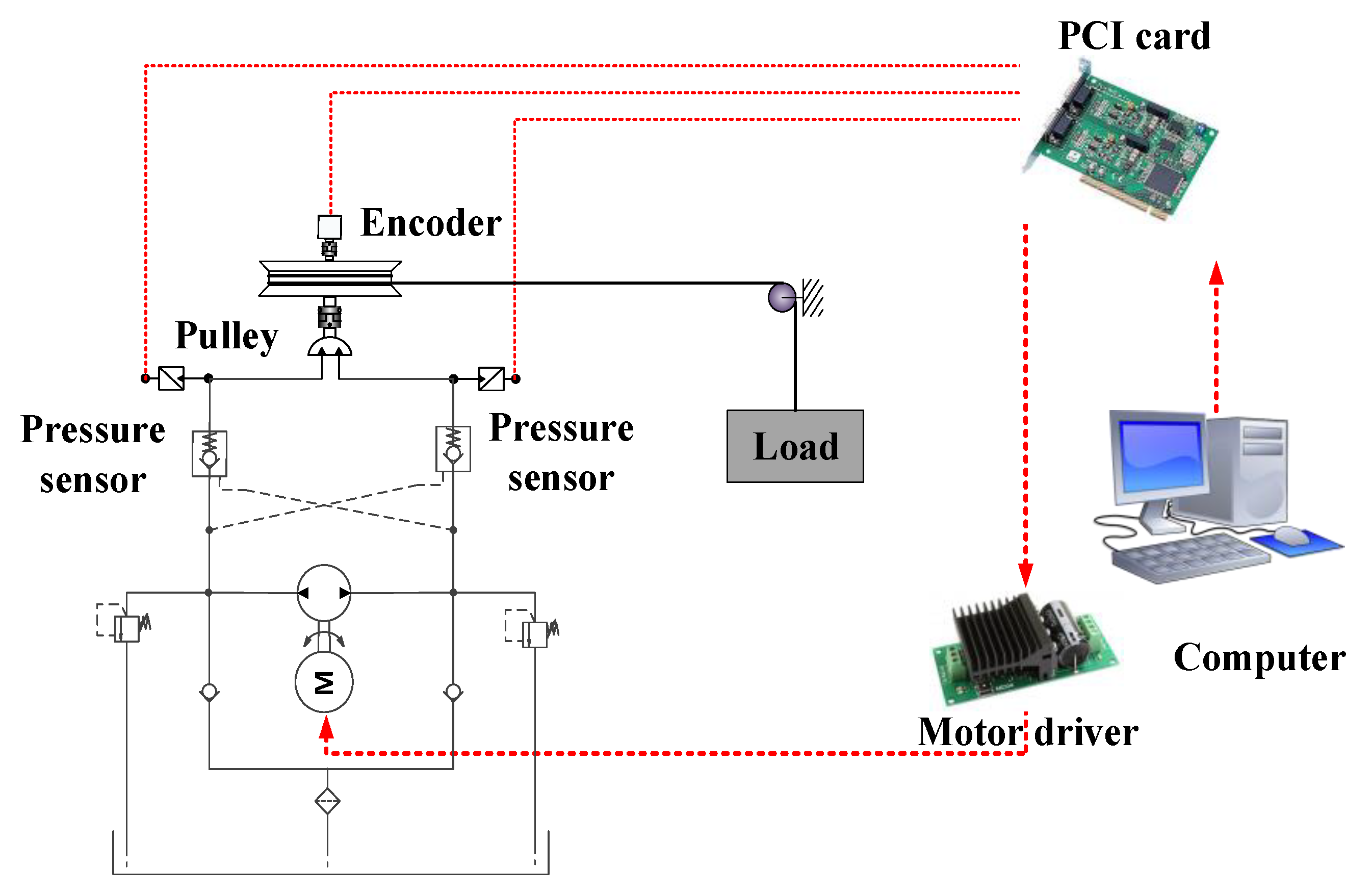
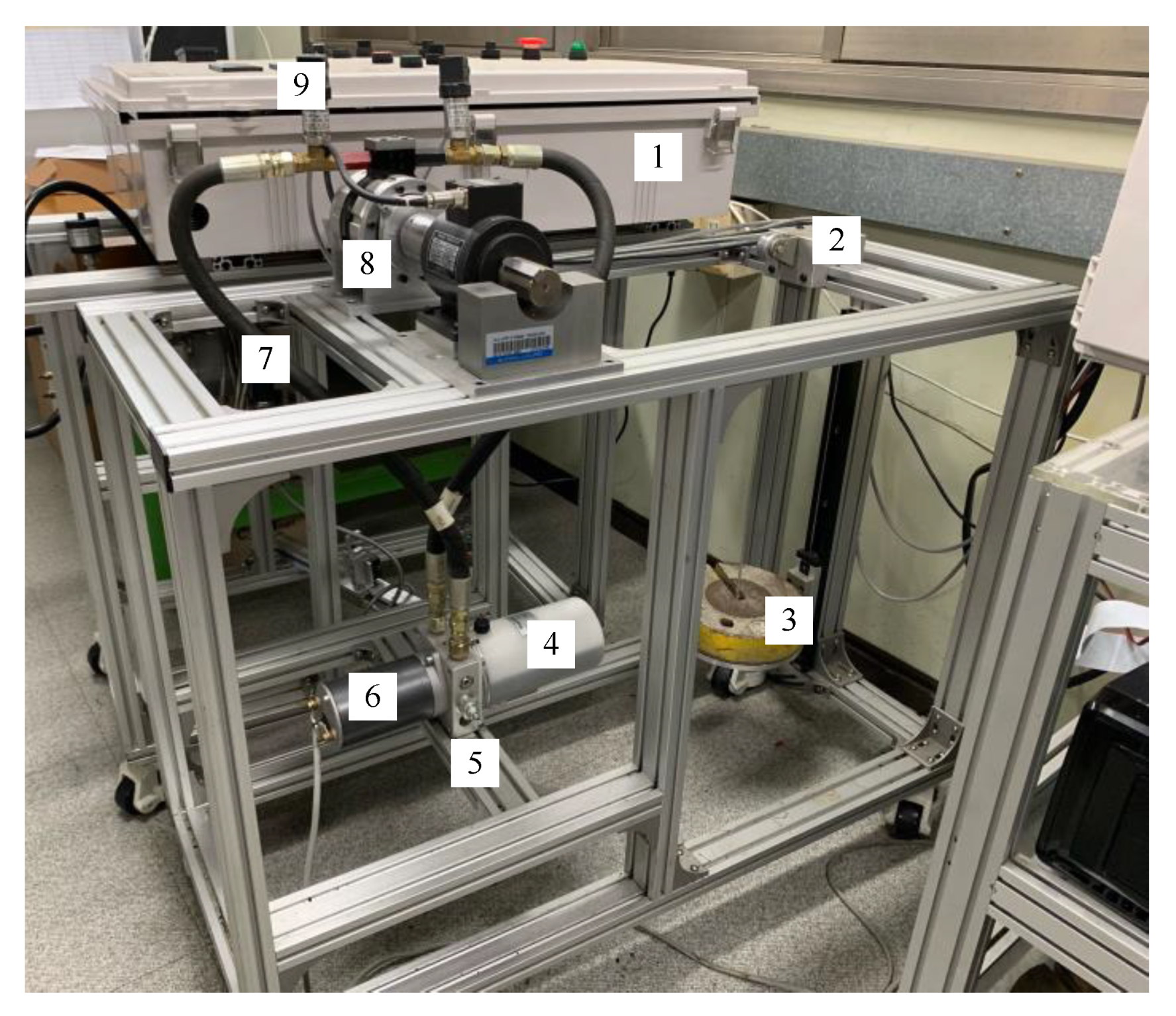
2. System Configuration
3. Controller Design for Electro-Hydraulic Rotary Actuator (EHRA) System
3.1. Fractional Order Calculation
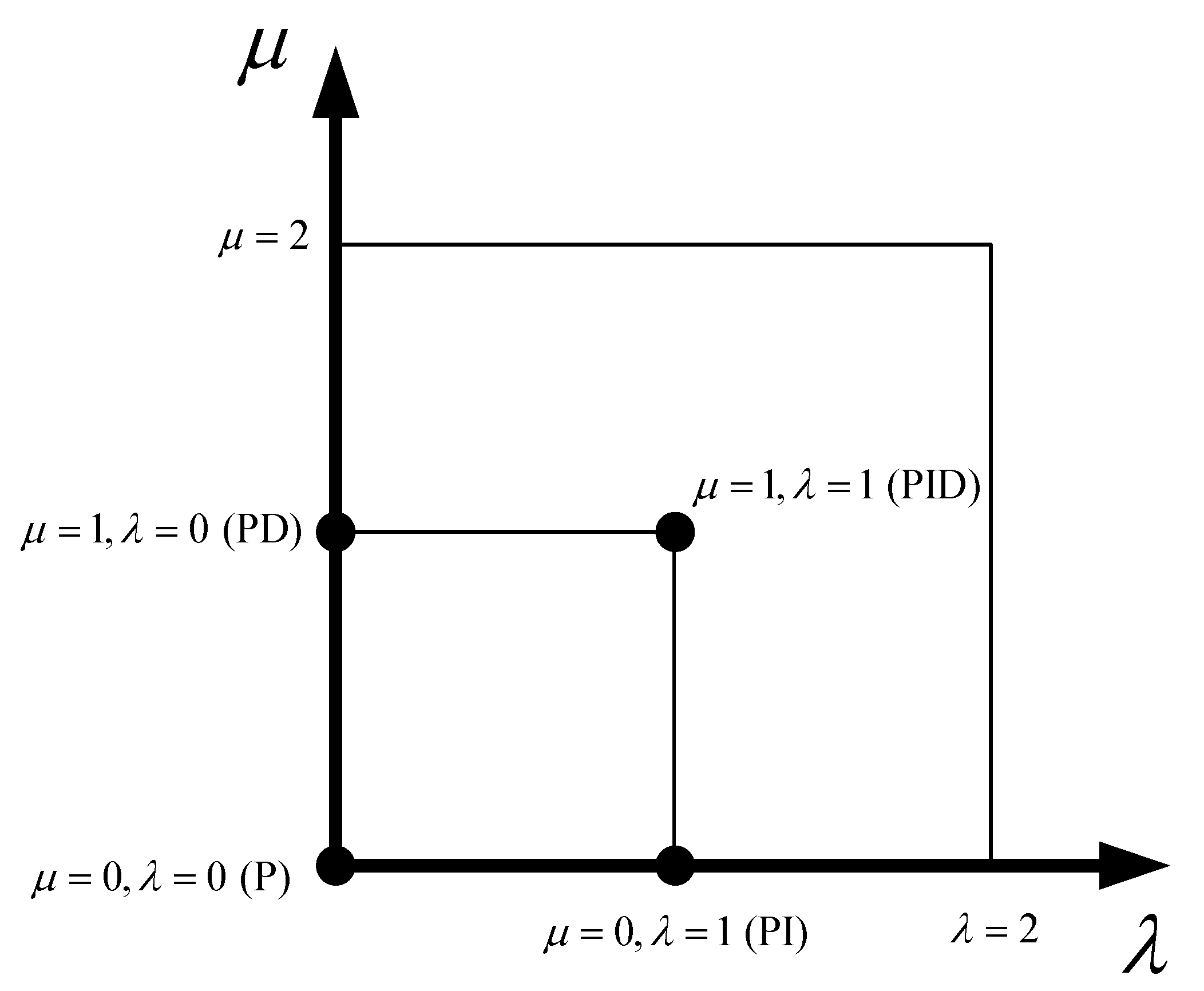
3.2. Fractional Order PID Controller
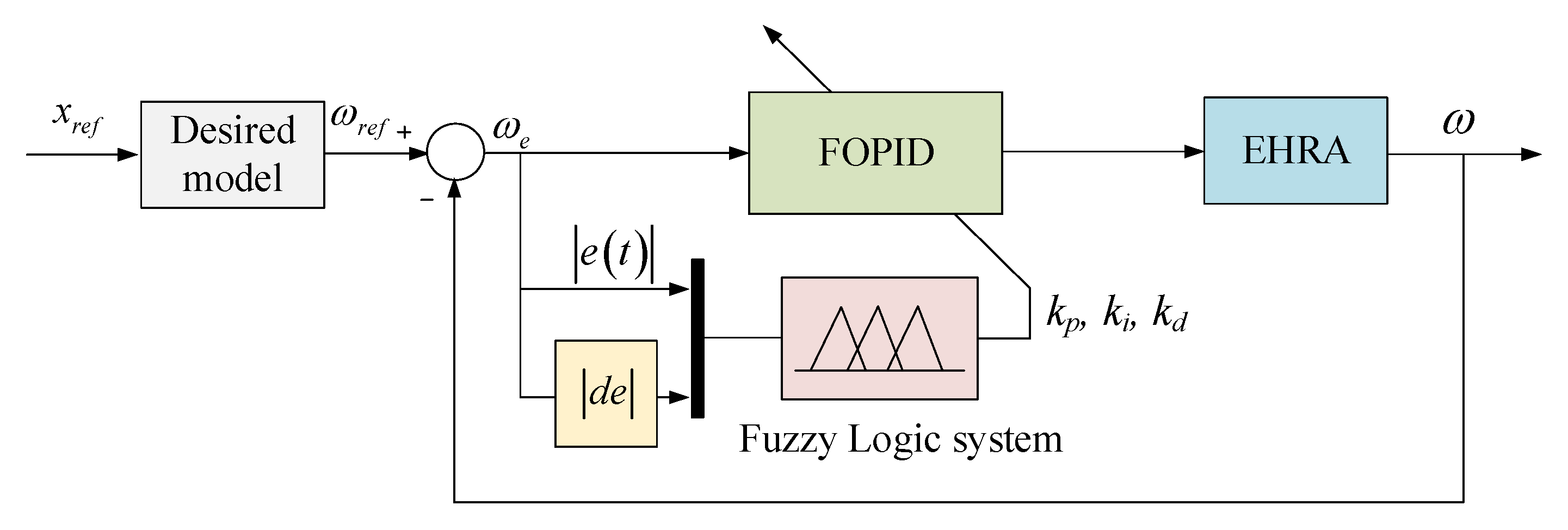
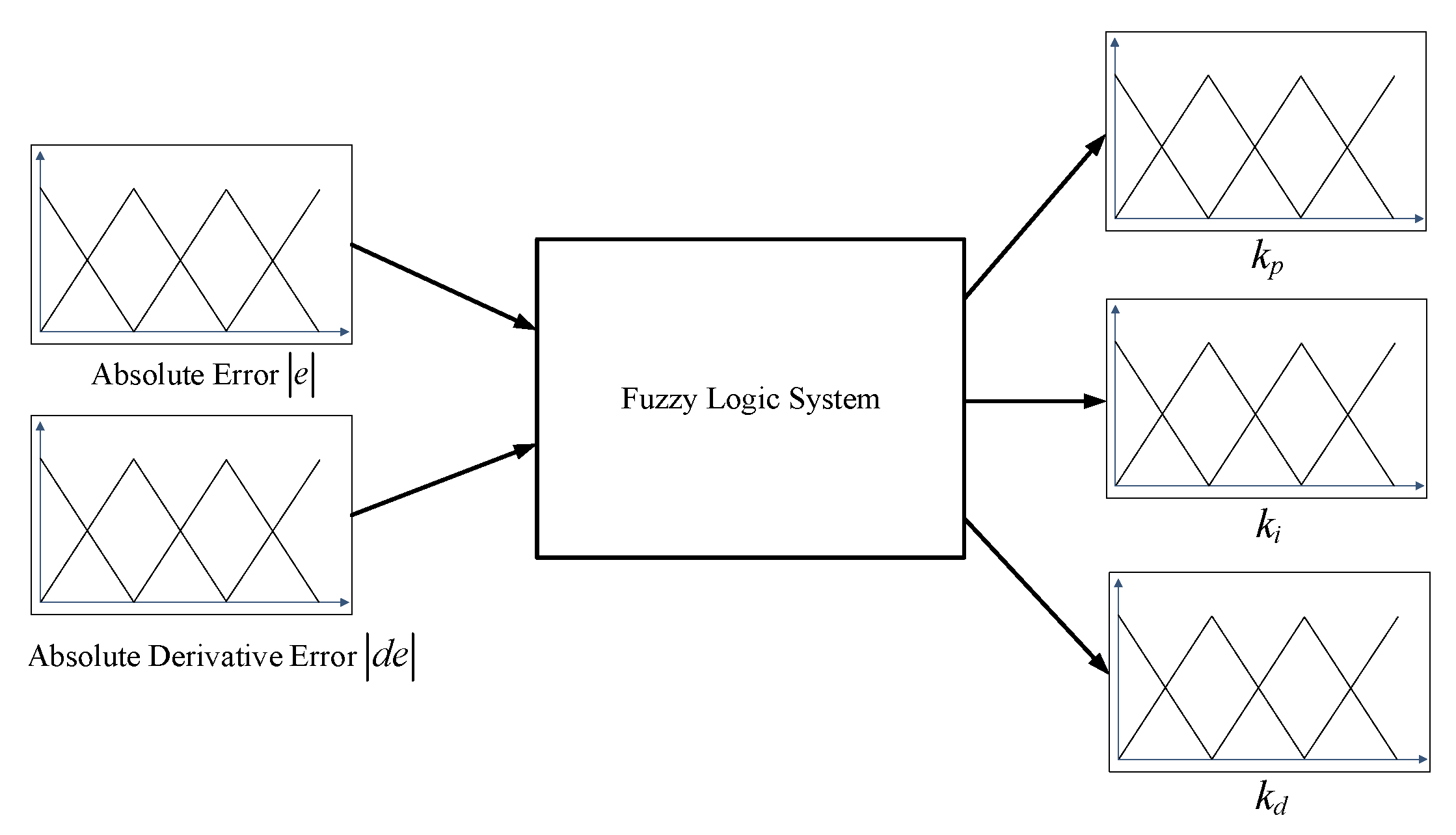
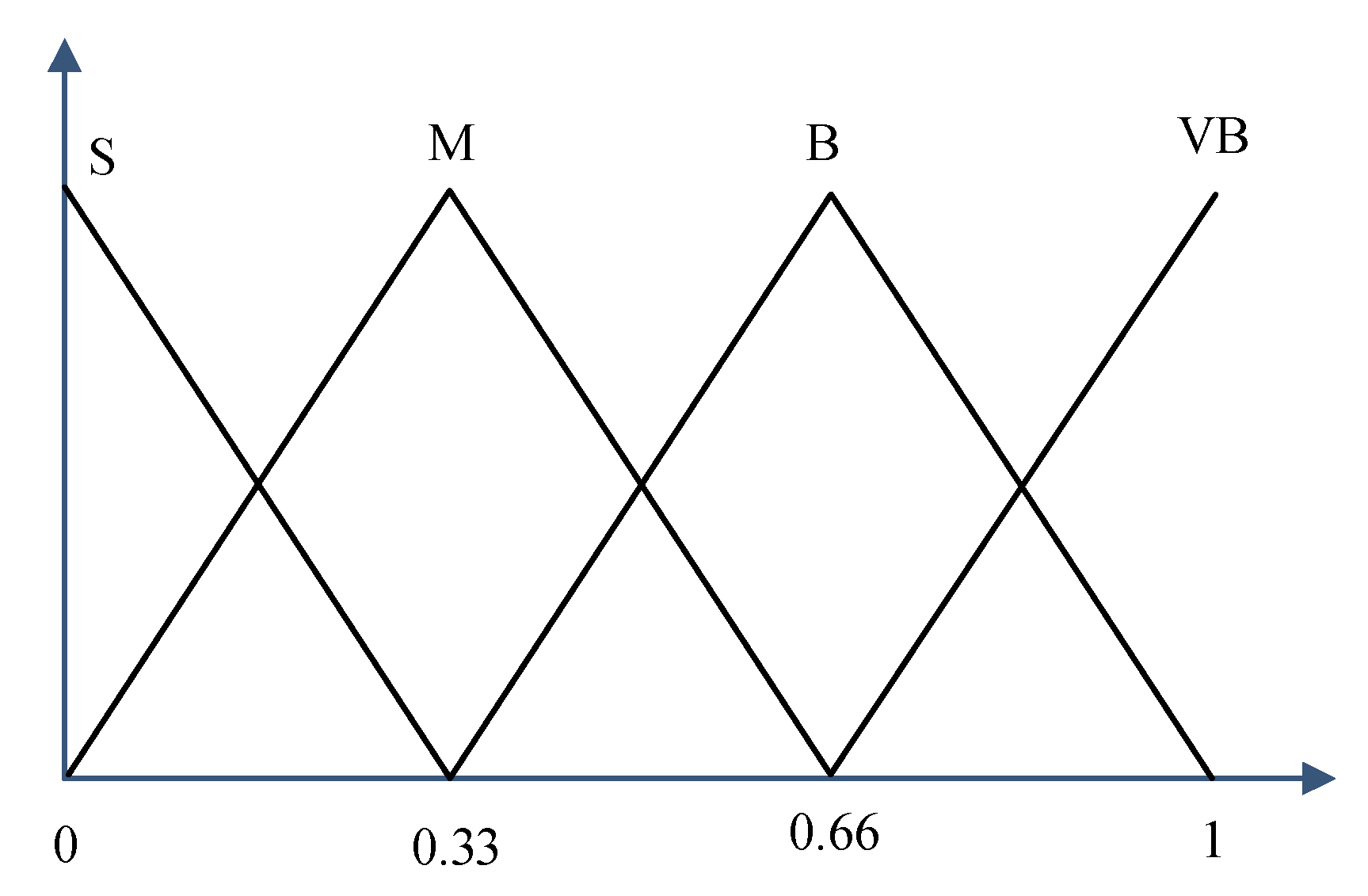
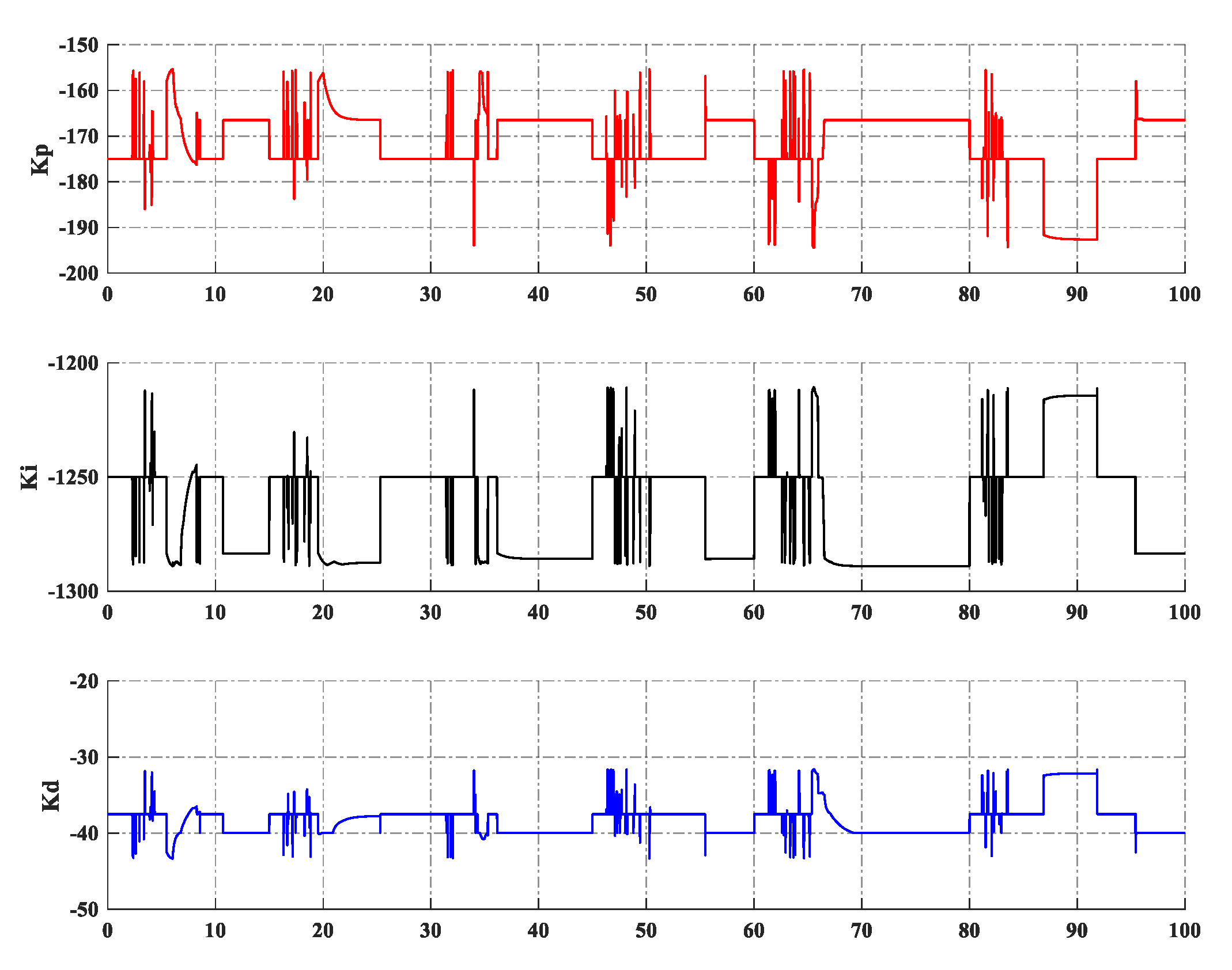
3.3. Fractional Order Fuzzy PID Controller Design
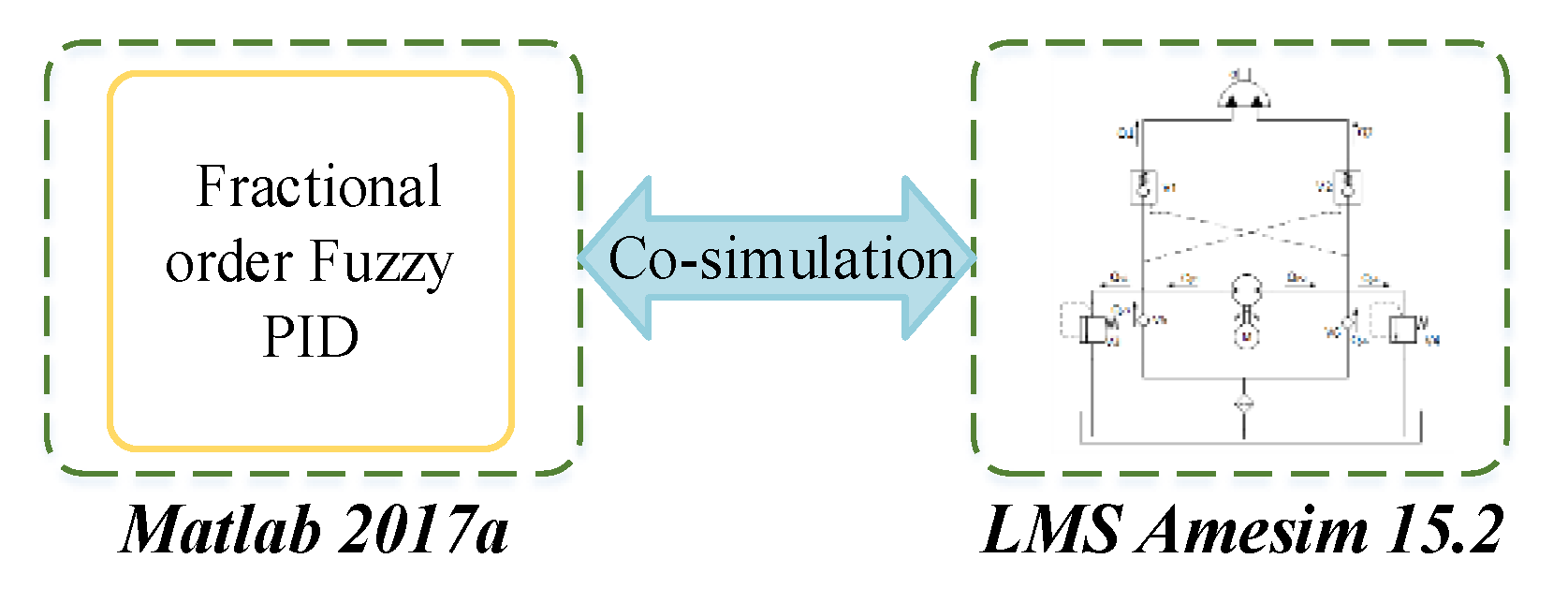
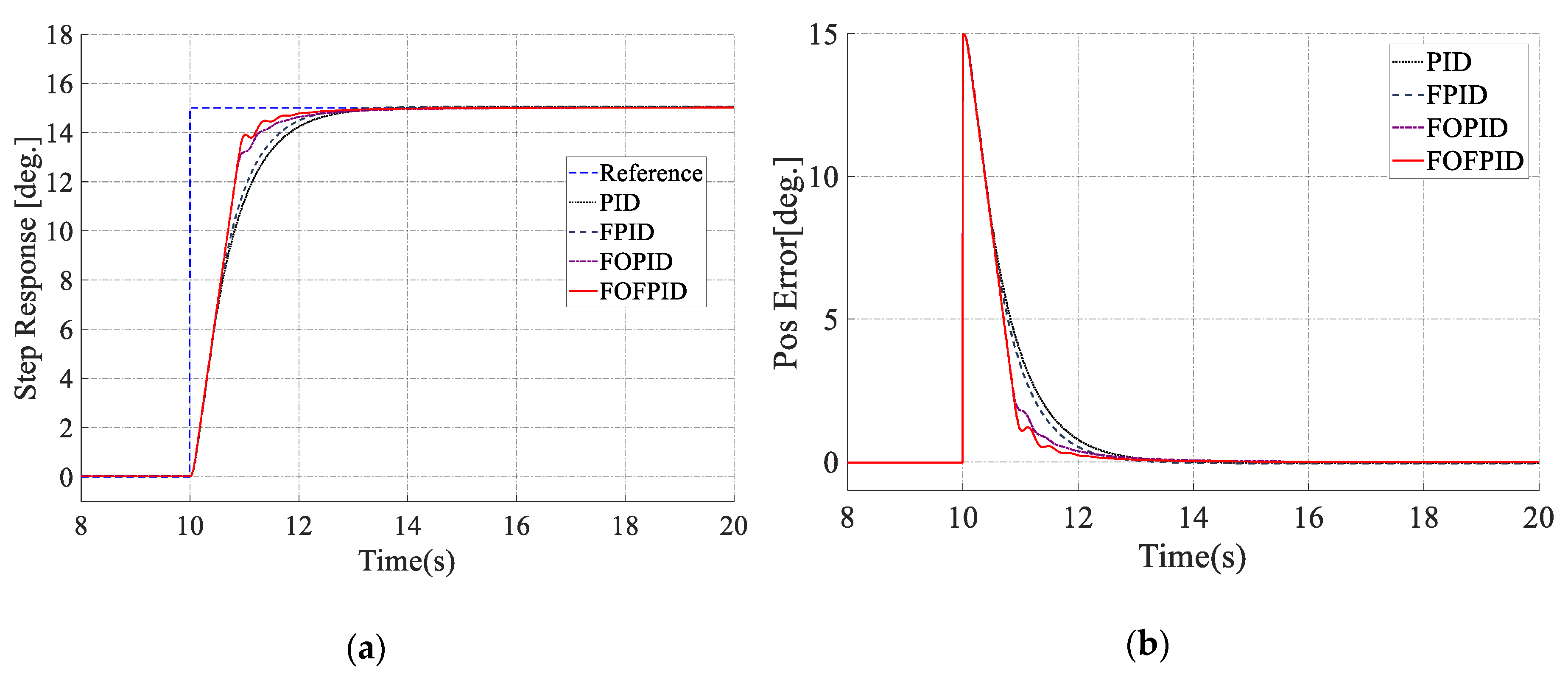
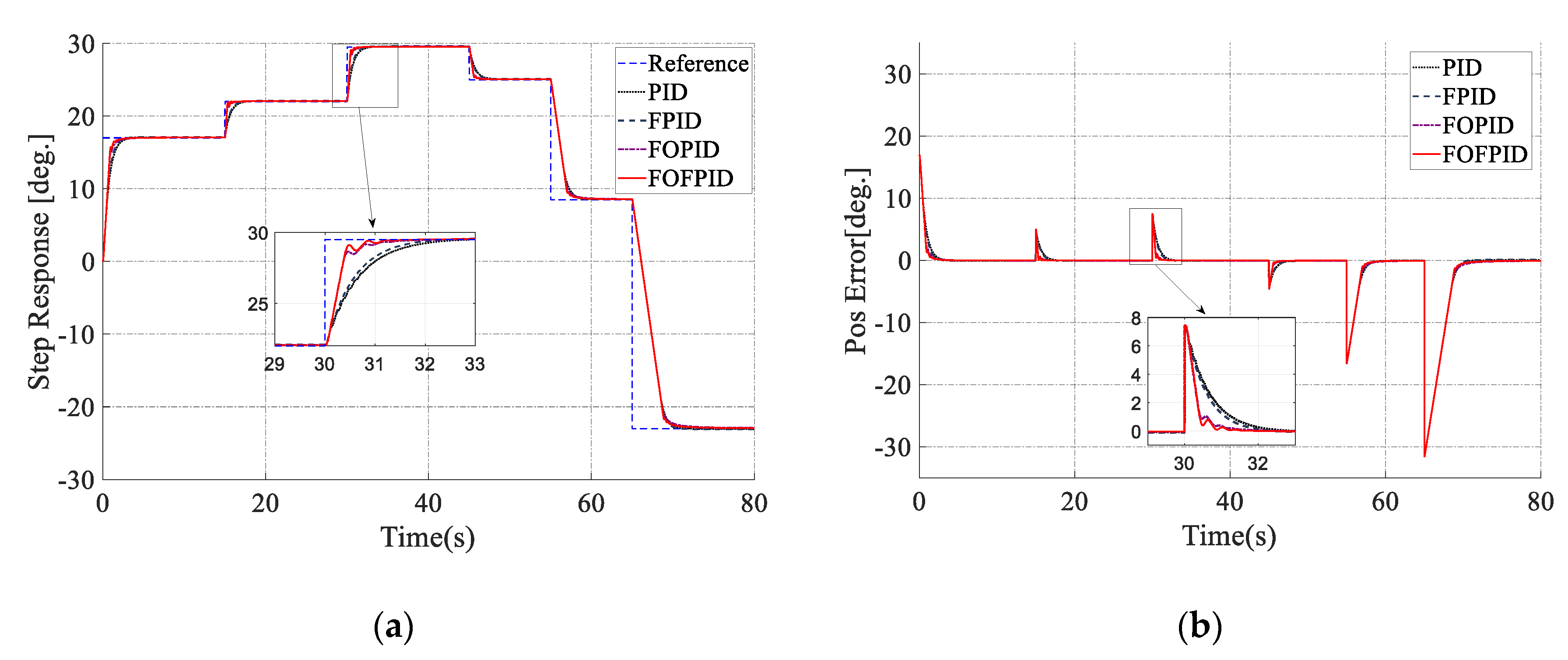
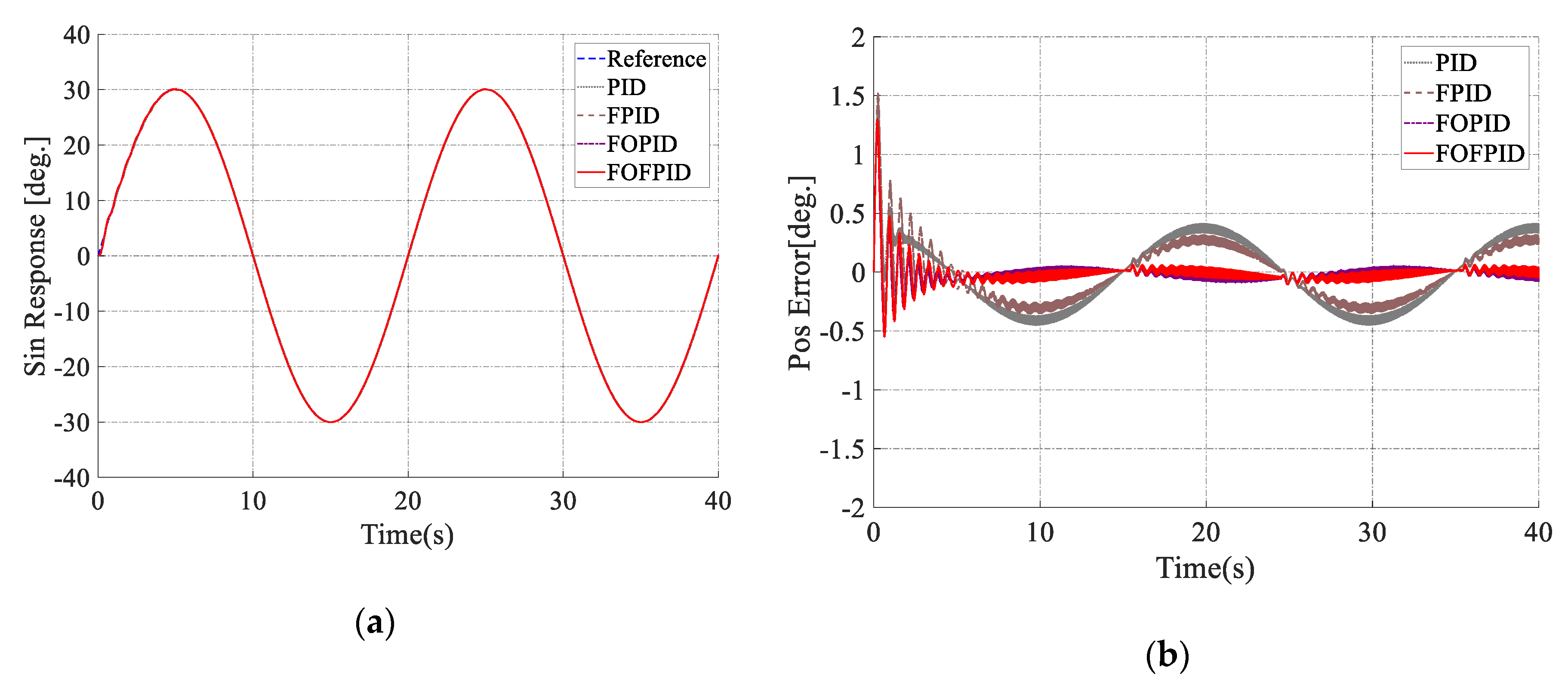
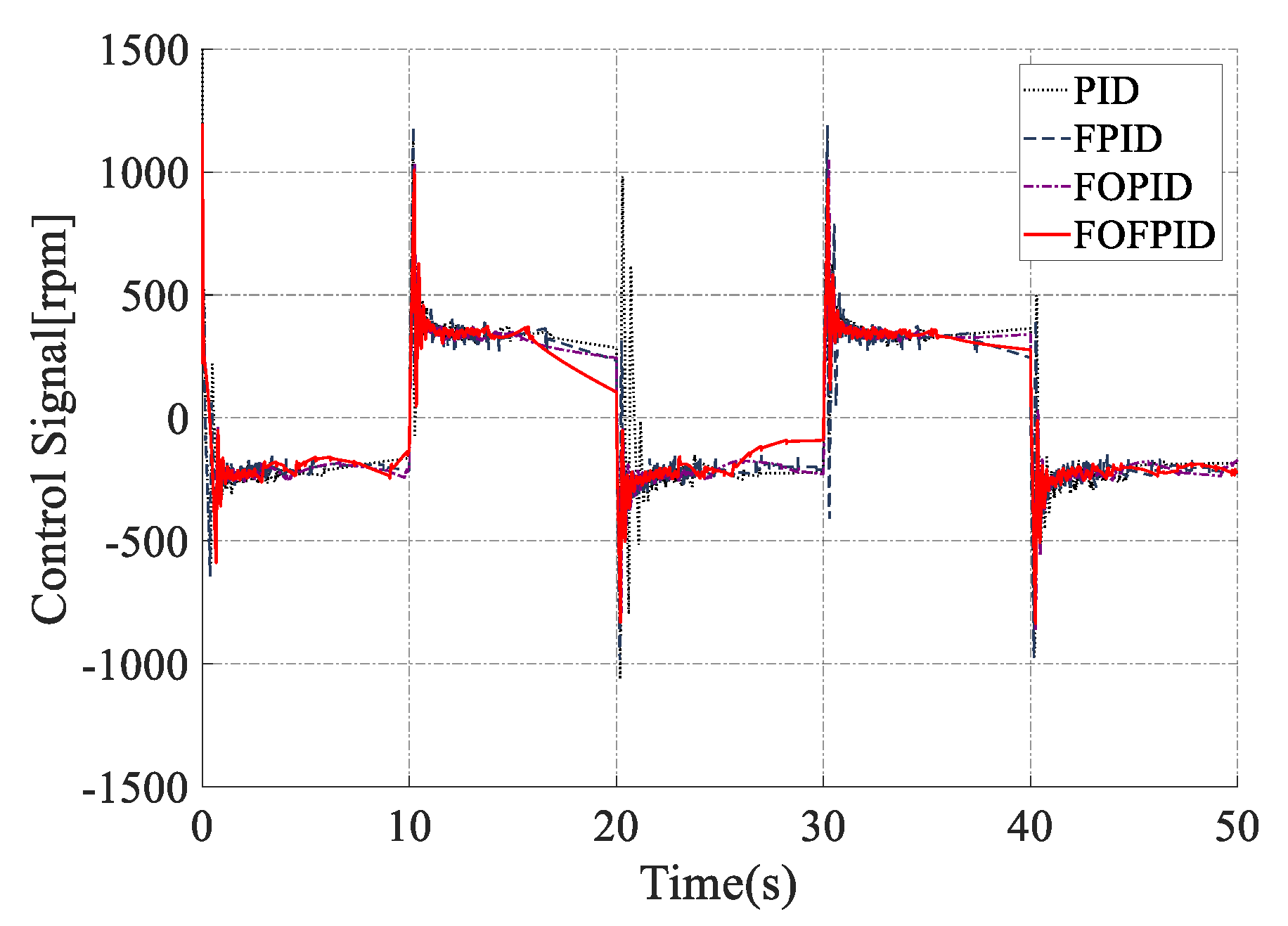
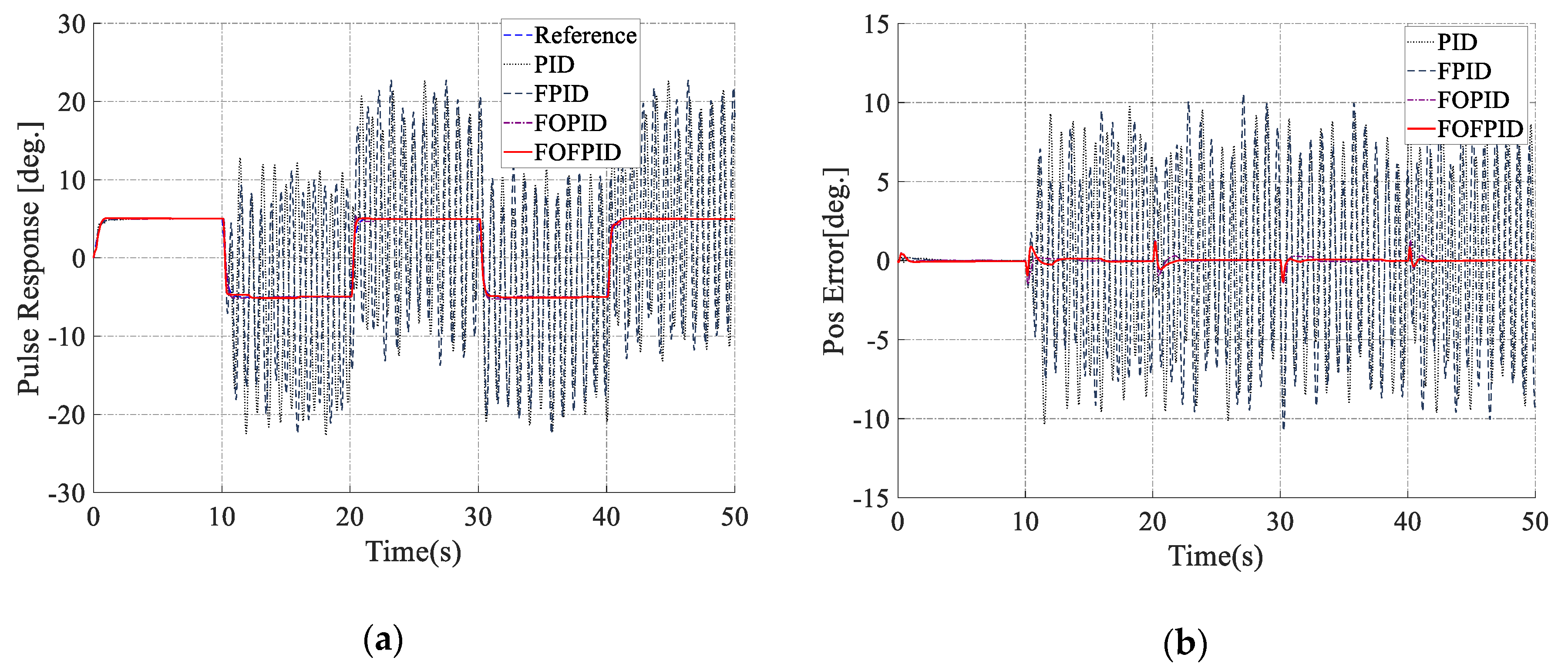
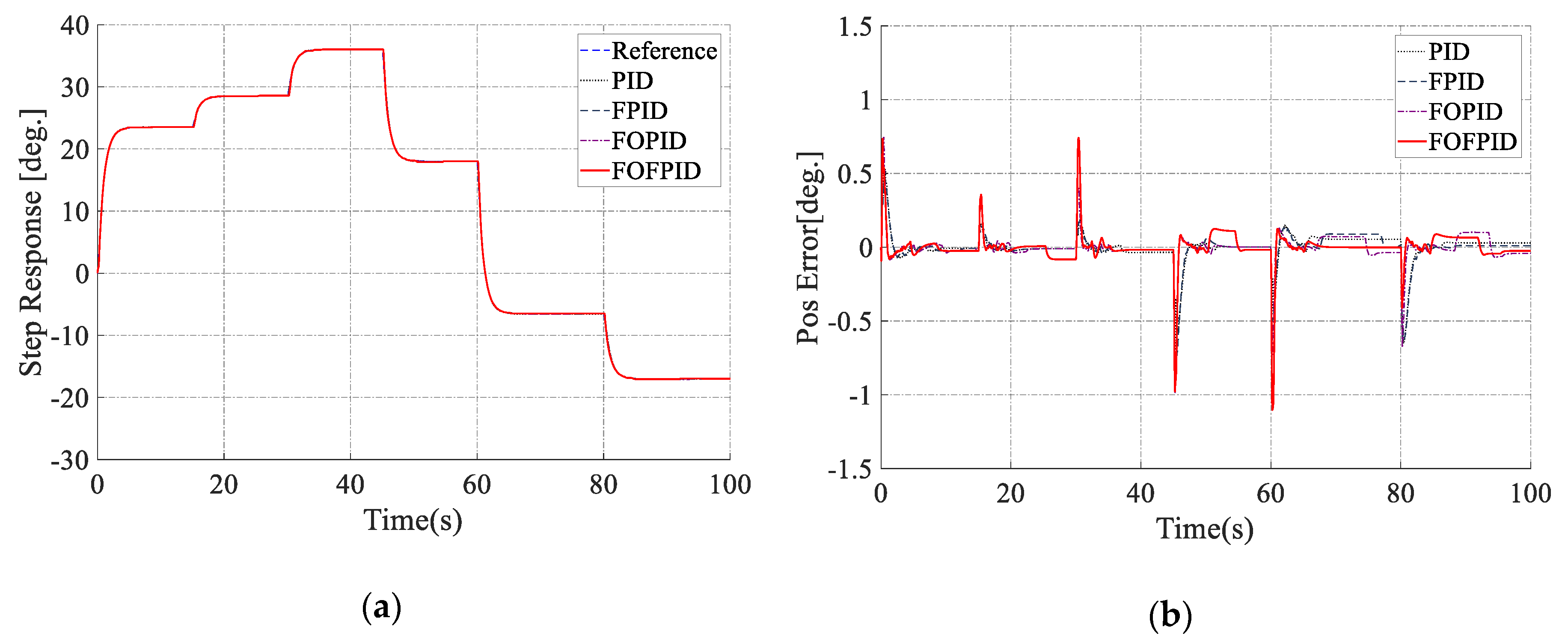
4. Simulation Results
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kallu, K.; Wang, J.; Abbasi, S.; Lee, M. Estimated reaction force-based bilateral control between 3DOF master and hydraulic slave manipulators for dismantlement. Electronics 2018, 7, 256. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, Z.; Wang, Z. Design, analysis, and verification of an electro- hydrostatic actuator for distributed actuation system. Sensors 2020, 20, 634. [Google Scholar] [CrossRef]
- Xue, L.; Wu, S.; Xu, Y.; Ma, D. A simulation-based multi-objective optimization design method for pump-driven electro-hydrostatic actuators. Processes 2019, 7, 274. [Google Scholar] [CrossRef]
- Habibi, S.; Goldenberg, A. Design of a new high-performance electrohydraulic actuator. IEEE/ASME Trans. Mechatron. 2000, 5, 158–164. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive backstepping control of an electrohydraulic actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Hong, G.; Wei, T.; Ding, X.; Duan, C. Multi-objective optimal design of electro-hydrostatic actuator driving motors for low temperature rise and high power weight ratio. Energies 2018, 11, 1173. [Google Scholar] [CrossRef]
- Tran, D.-T.; Do, T.-C.; Ahn, K.-K. Extended high gain observer-based sliding mode control for an electro-hydraulic system with a variant payload. Int. J. Precis. Eng. Manuf. 2019, 20, 2089–2100. [Google Scholar] [CrossRef]
- Chu, M.; Chu, J. Graphical robust PID tuning based on uncertain systems for disturbance rejection satisfying multiple objectives. Int. J. Control Autom. Syst. 2018, 16, 2033–2042. [Google Scholar] [CrossRef]
- Ha, T.W.; Jun, G.H.; Nguyen, M.T.; Han, S.M.; Shin, J.W.; Ahn, K.K. Position control of an Electro-Hydrostatic Rotary Actuator using adaptive PID control. J. Drive Control 2017, 14, 37–44. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor – fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Park, S.H.; Jeong, E.I.; Shin, D.G. Identification of the Relationship Between the Discrete TDCIM and the Discrete PID Controller. J. Drive Control 2017, 14, 23–28. [Google Scholar] [CrossRef]
- Freire, H.F.; Oliveira, P.; Pires, E.J.S. From single to many-objective PID controller design using particle swarm optimization. Int. J. Control Autom. Syst. 2017, 15, 918–932. [Google Scholar] [CrossRef]
- Lashin, M.; Fanni, M.; Mohamed, A.M.; Miyashita, T. Dynamic modeling and inverse optimal PID with feed-forward control in H∞ framework for a novel 3D pantograph manipulator. Int. J. Control Autom. Syst. 2018, 16, 39–54. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional order systems and fractional order PID controllers. IEEE Trans. Automat. Contr. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Asgharnia, A.; Jamali, A.; Shahnazi, R.; Maheri, A. load mitigation of a class of 5-MW wind turbine with RBF neural network based fractional-order PID controller. ISA Trans. 2020, 96, 272–286. [Google Scholar] [CrossRef] [PubMed]
- Khan, I.A.; Alghamdi, A.S.; Jumani, T.A.; Alamgir, A.; Awan, A.B.; Khidrani, A. Salp swarm optimization algorithm-based fractional order PID controller for dynamic response and stability enhancement of an automatic voltage regulator system. Electronics 2019, 8, 1472. [Google Scholar] [CrossRef]
- Tang, Y.; Cui, M.; Hua, C.; Li, L.; Yang, Y. Optimum design of fractional order PIλDμ controller for AVR system using chaotic ant swarm. Expert Syst. Appl. 2012, 39, 6887–6896. [Google Scholar] [CrossRef]
- Mishra, P.; Kumar, V.; Rana, K.P.S. A fractional order fuzzy PID controller for binary distillation column control. Expert Syst. Appl. 2015, 42, 8533–8549. [Google Scholar] [CrossRef]
- Kumar, V.; Rana, K.P.S. Nonlinear adaptive fractional order fuzzy PID control of a 2-link planar rigid manipulator with payload. J. Franklin Inst. 2017, 354, 993–1022. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, C.; Zhou, X.; Zhu, H. Fractional order fuzzy PID optimal control in copper removal process of zinc hydrometallurgy. Hydrometallurgy 2018, 178, 60–76. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Das, S.; Gupta, A. A novel fractional order fuzzy PID controller and its optimal time domain tuning based on integral performance indices. Eng. Appl. Artif. Intell. 2012, 25, 430–442. [Google Scholar] [CrossRef]
- Tri, N.M.; Ba, D.X.; Ahn, K.K. A gain-adaptive intelligent nonlinear control for an electrohydraulic rotary actuator. Int. J. Precis. Eng. Manuf. 2018, 19, 665–673. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. FOMCON: A MATLAB toolbox for fractional-order system identification and control. Int. J. Microelectron. Comput. Sci. 2011, 2, 51–62. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S | M | B | VB | |
|---|---|---|---|---|
| S | M | M | B | VB |
| M | S | M | B | VB |
| B | S | S | B | B |
| VB | S | S | M | B |
| S | M | B | VB | |
|---|---|---|---|---|
| S | VB | VB | S | S |
| M | VB | VB | S | S |
| B | VB | VB | M | S |
| VB | VB | B | M | S |
| S | M | B | VB | |
|---|---|---|---|---|
| S | B | M | S | S |
| M | B | B | S | S |
| B | VB | B | M | S |
| VB | VB | B | M | S |
| Components | Parameters | Value | Unit |
|---|---|---|---|
| Hydraulic Pump | Displacement | 0.97 | cc/rev |
| Rated rotation speed | 3000 | rpm | |
| Relief valve | Pressure | 120 | bar |
| Hydraulic Rotary Actuator | Displacement | 27.54 | cc/rev |
| Rotation angle | 100 | deg. | |
| Torque output | 120 | Nm | |
| Hydraulic oil | Effective bulk modulus | 1.5 × 109 | Pa |
| Density | 0.87 | kg/dm3 | |
| Encoder | Viscous Friction Coefficient | 30 | N/(m/s) |
| Model | E40H8-5000-3-N-24 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Do, T.C.; Tran, D.T.; Dinh, T.Q.; Ahn, K.K. Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller. Electronics 2020, 9, 926. https://doi.org/10.3390/electronics9060926
Do TC, Tran DT, Dinh TQ, Ahn KK. Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller. Electronics. 2020; 9(6):926. https://doi.org/10.3390/electronics9060926
Chicago/Turabian StyleDo, Tri Cuong, Duc Thien Tran, Truong Quang Dinh, and Kyoung Kwan Ahn. 2020. "Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller" Electronics 9, no. 6: 926. https://doi.org/10.3390/electronics9060926
APA StyleDo, T. C., Tran, D. T., Dinh, T. Q., & Ahn, K. K. (2020). Tracking Control for an Electro-Hydraulic Rotary Actuator Using Fractional Order Fuzzy PID Controller. Electronics, 9(6), 926. https://doi.org/10.3390/electronics9060926