Current Regulator Design for Dual Y Shift 30 Degrees Permanent Magnet Synchronous Motor


Abstract
1. Introduction
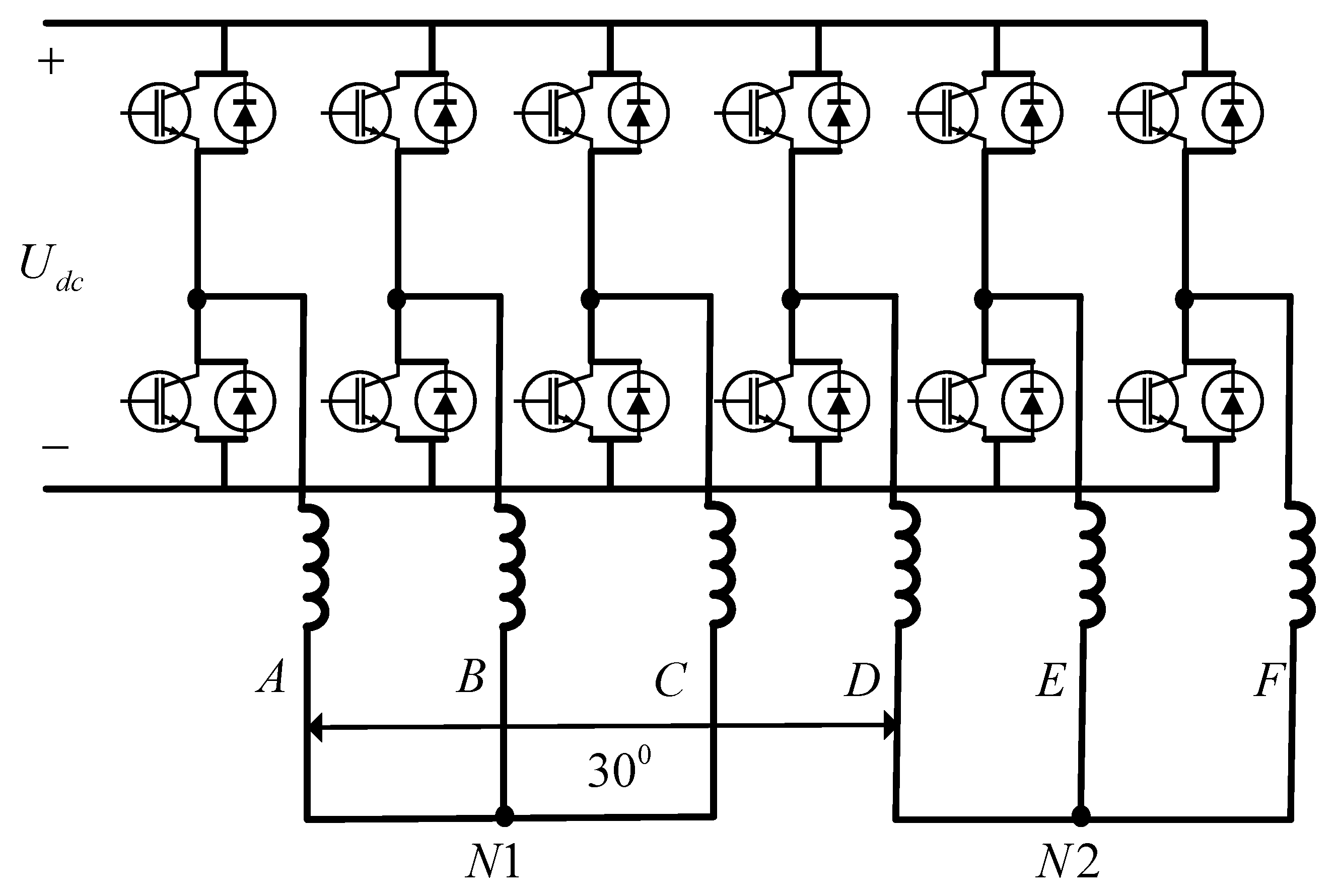
2. Mathematical Model of DT_PMSM
3. Current Regulator Design in Fundamental Subspace
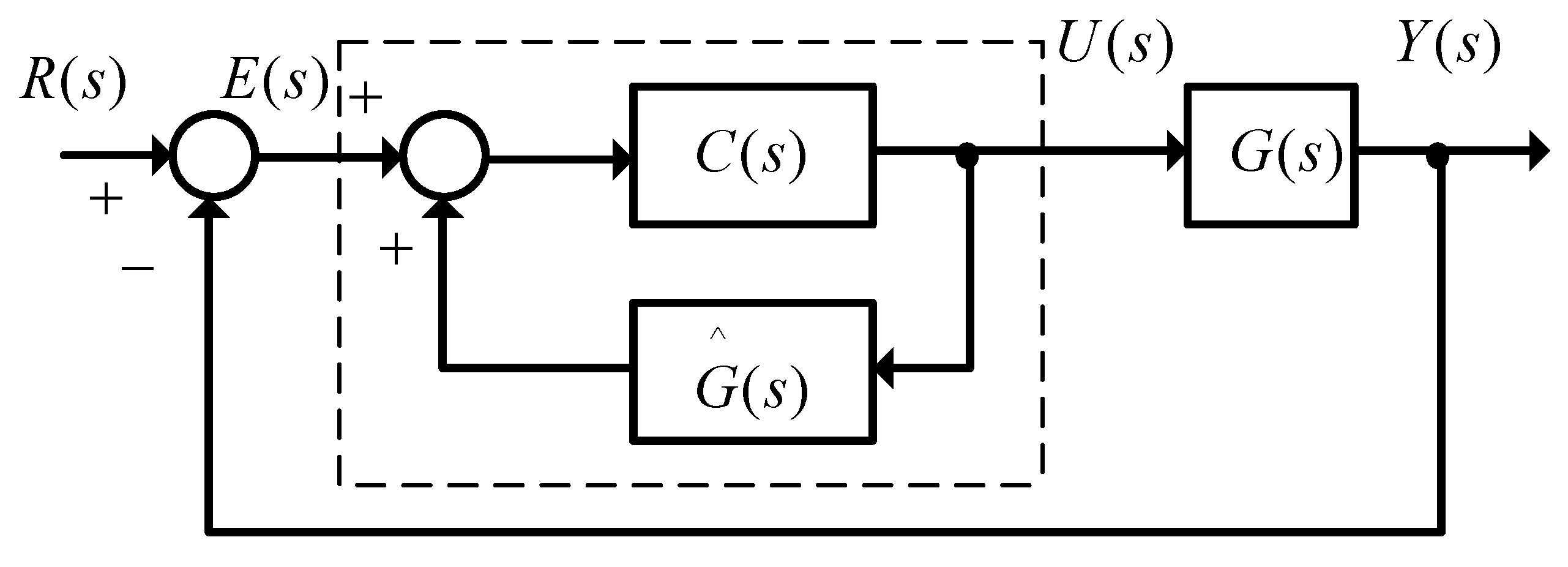
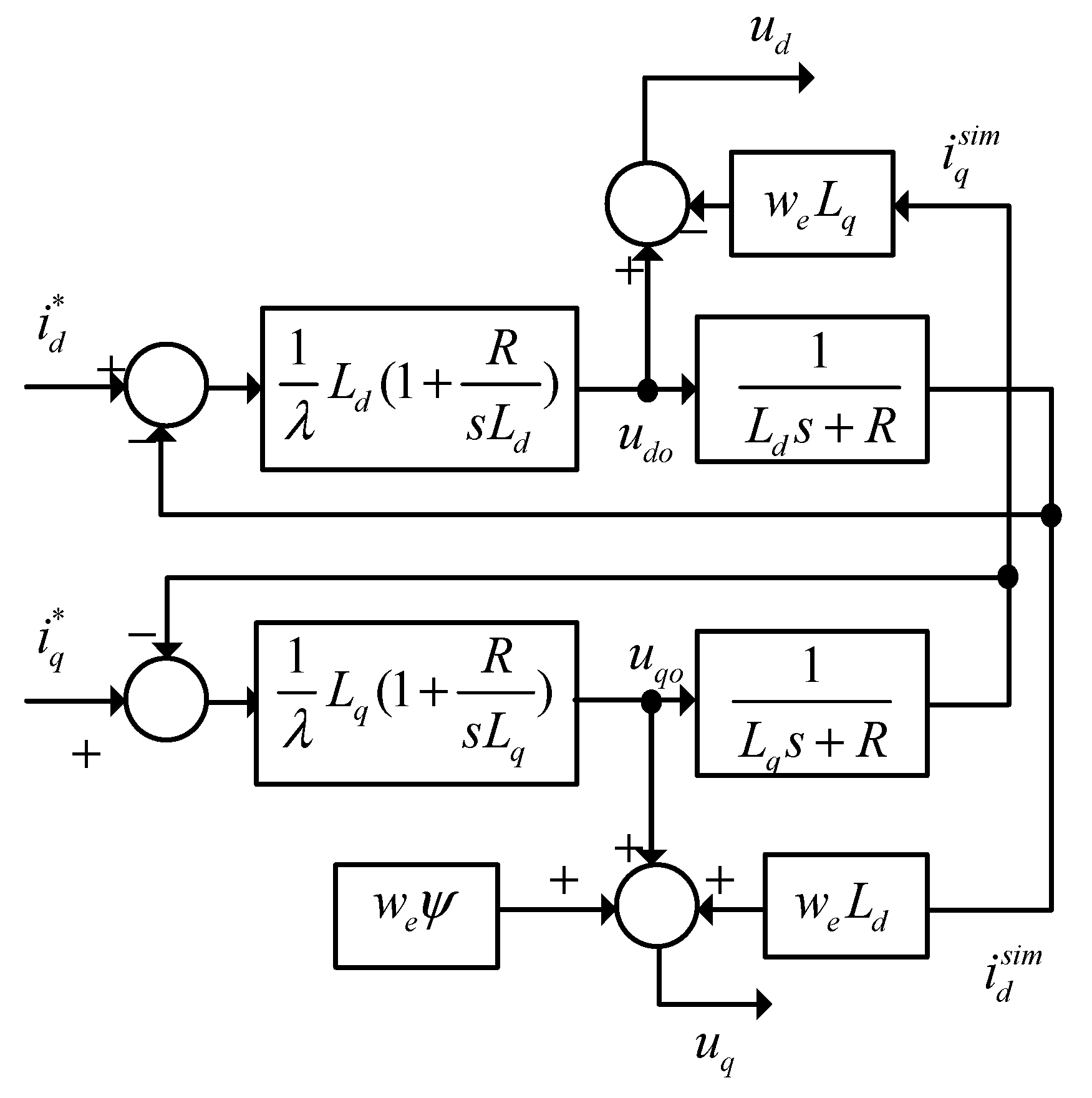
3.1. Traditional IMC Method
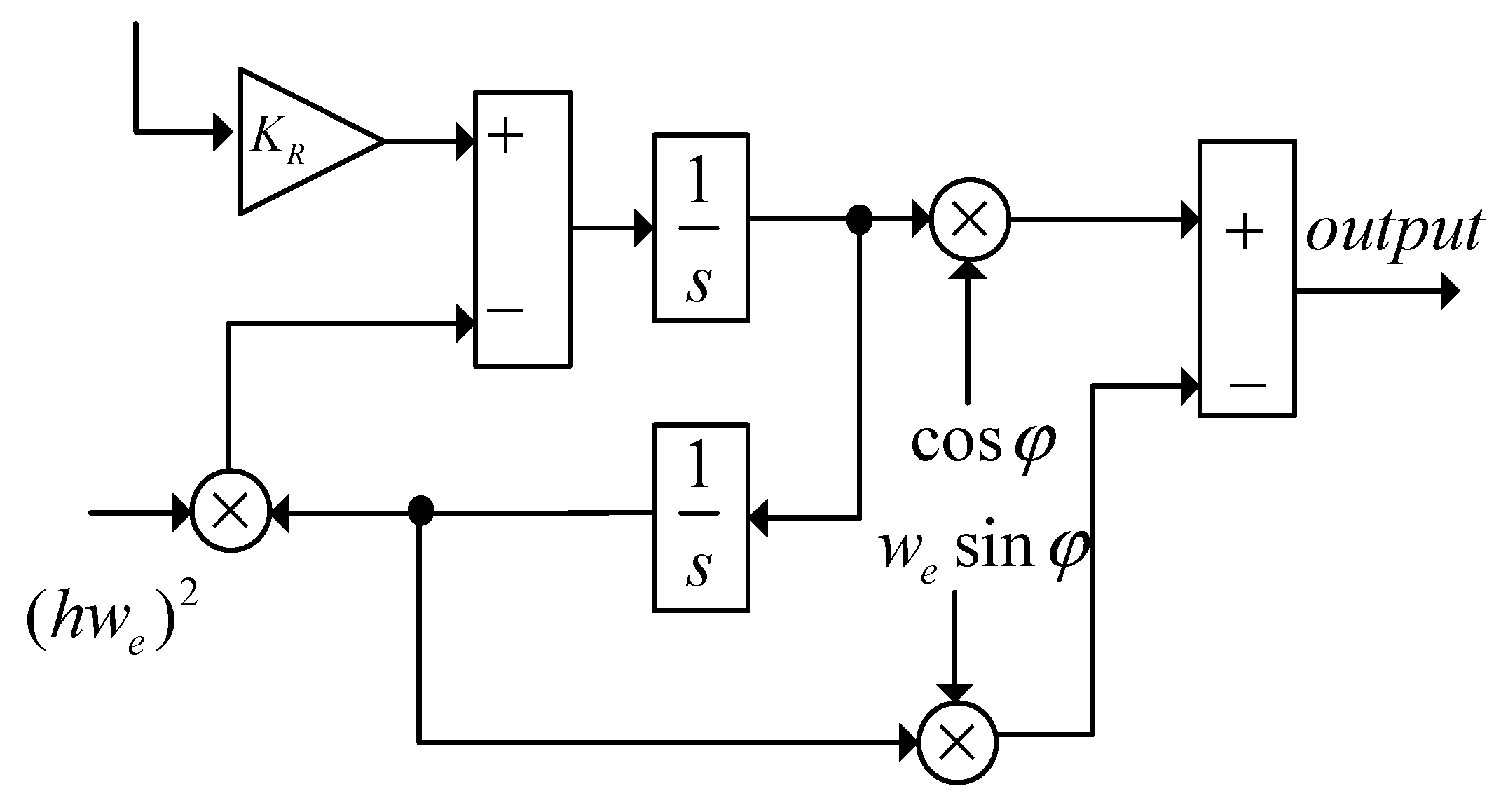
3.2. Sliding Mode Control Based on the Internal Model
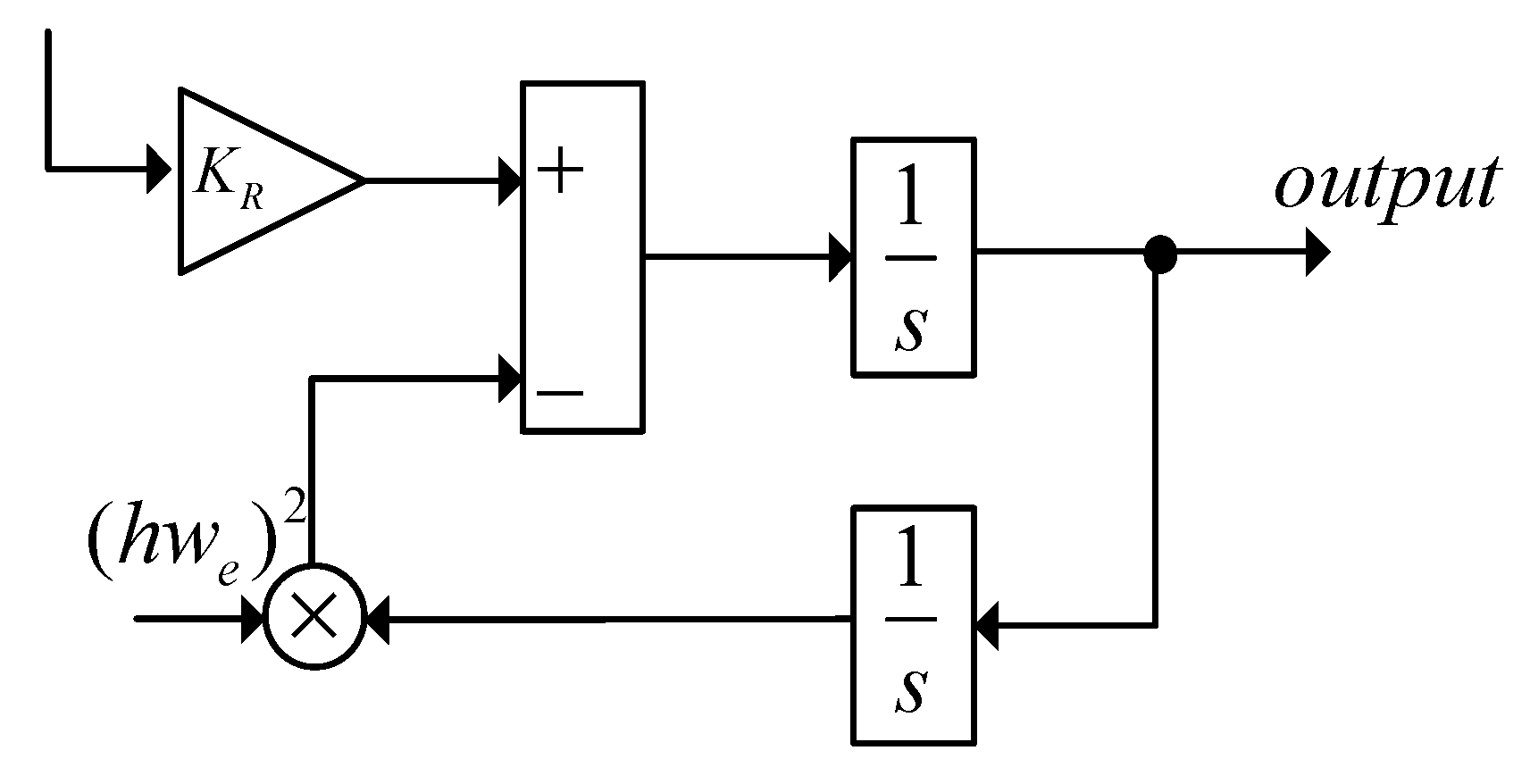
4. Current Regulator Design in Harmonic Subspace
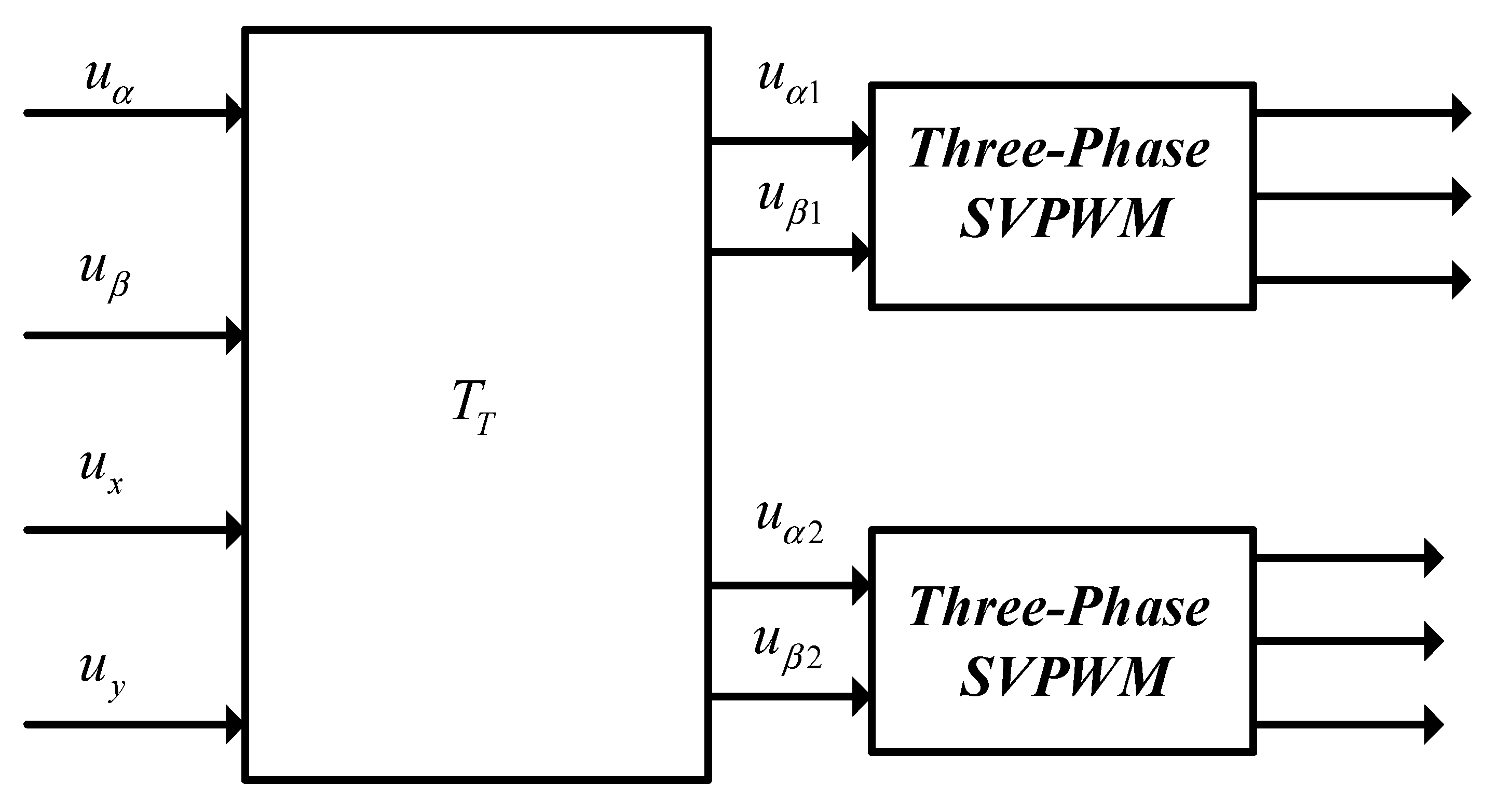
5. PWM Strategy
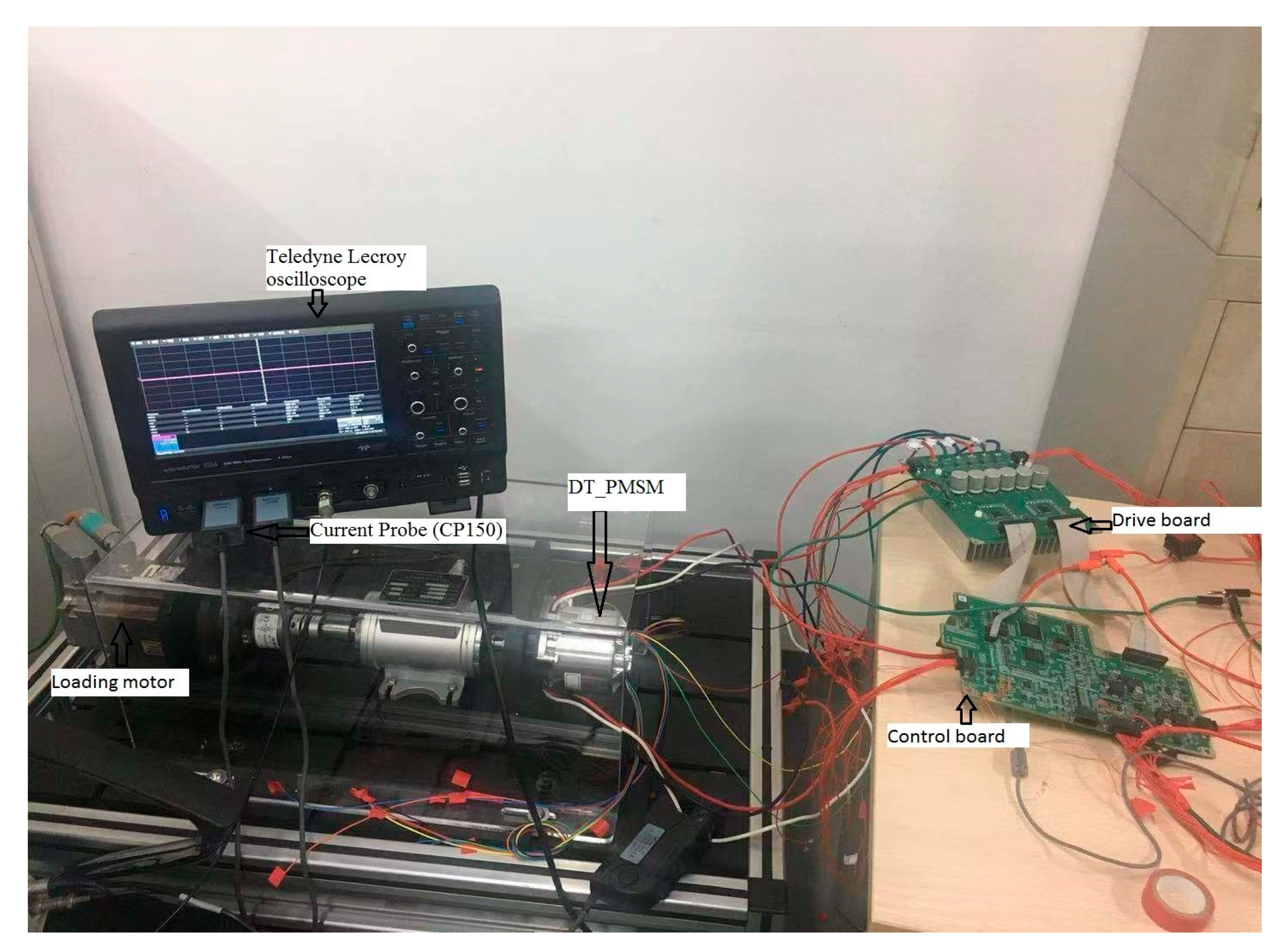
6. Experimental Verification
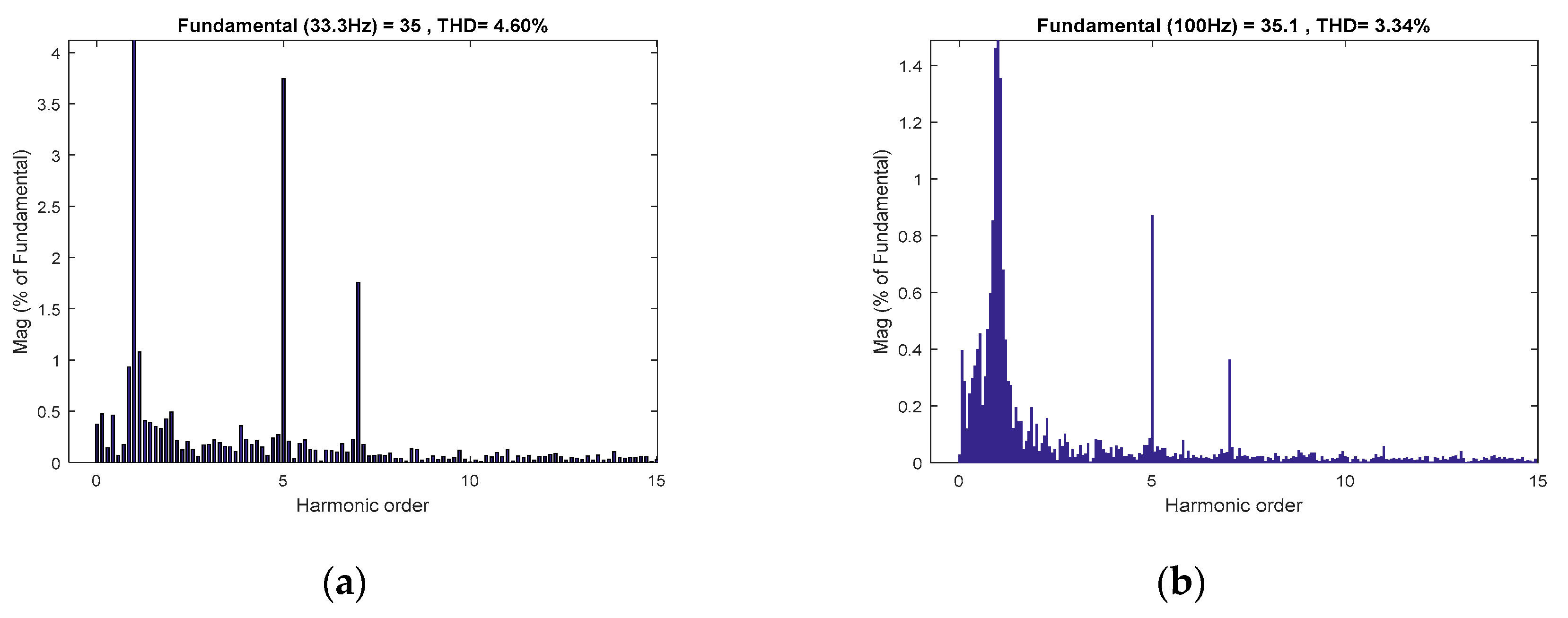
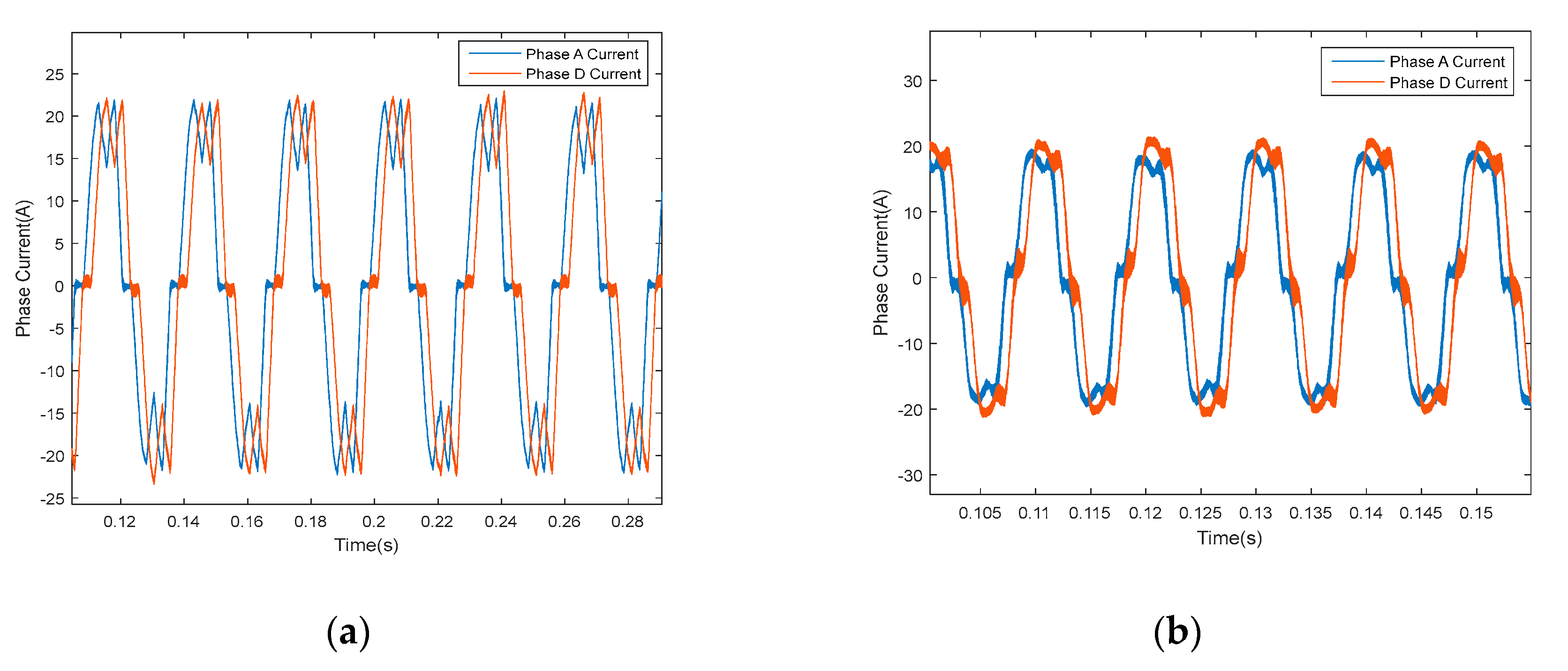
6.1. Traditional IMC Method
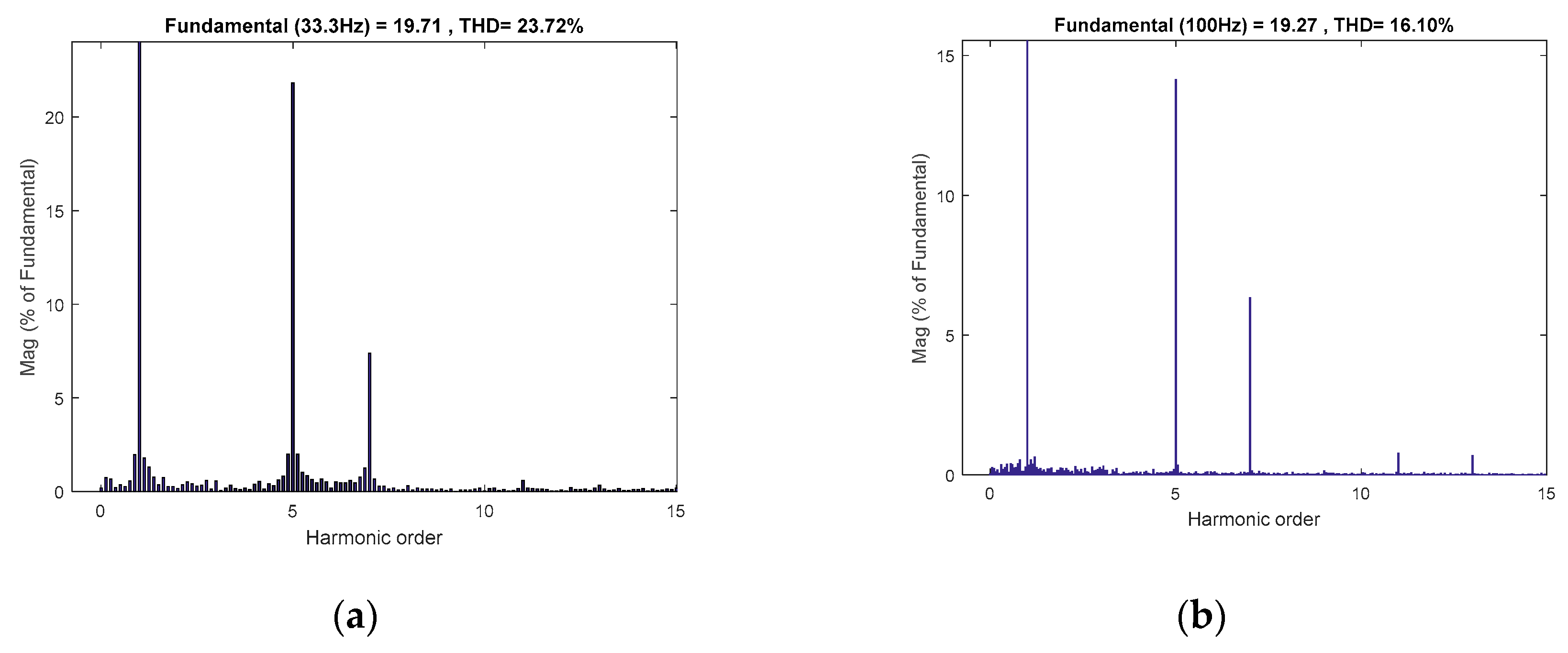
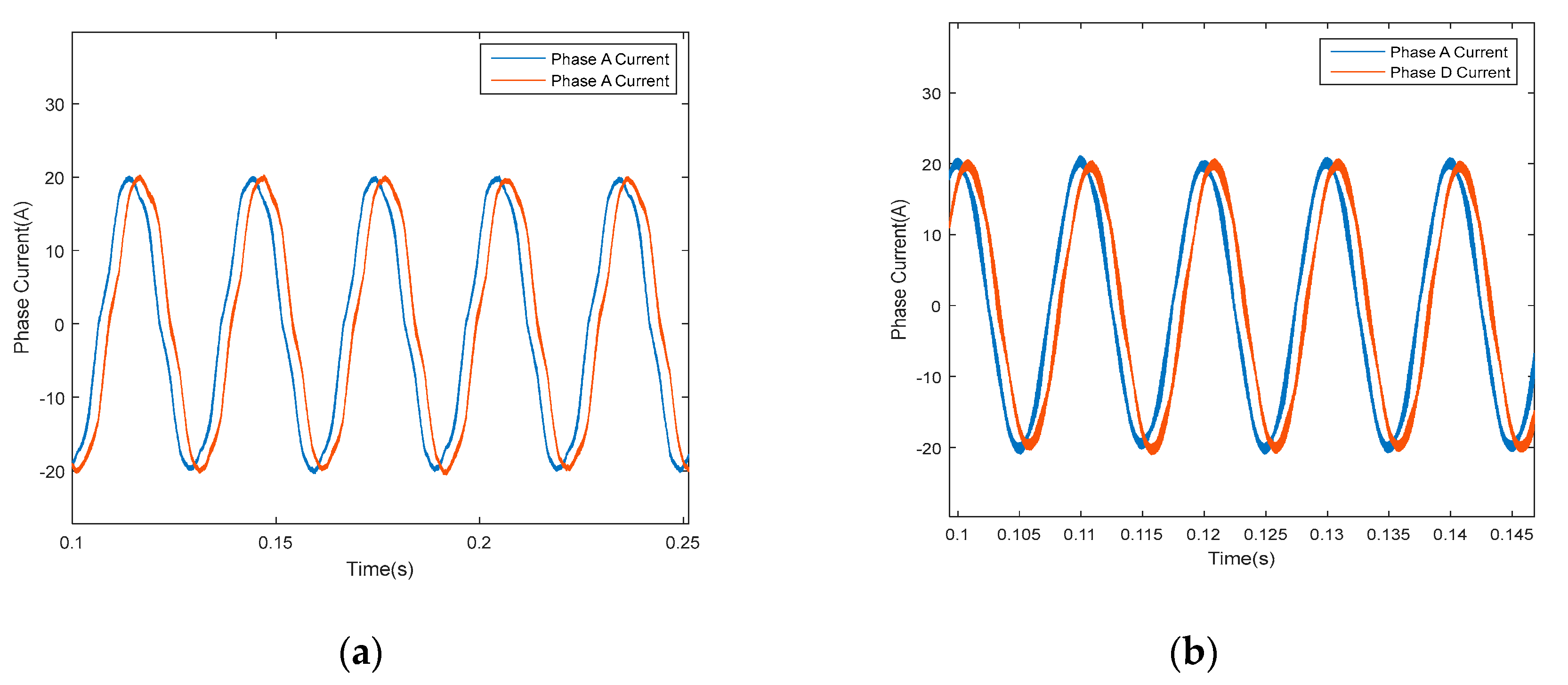
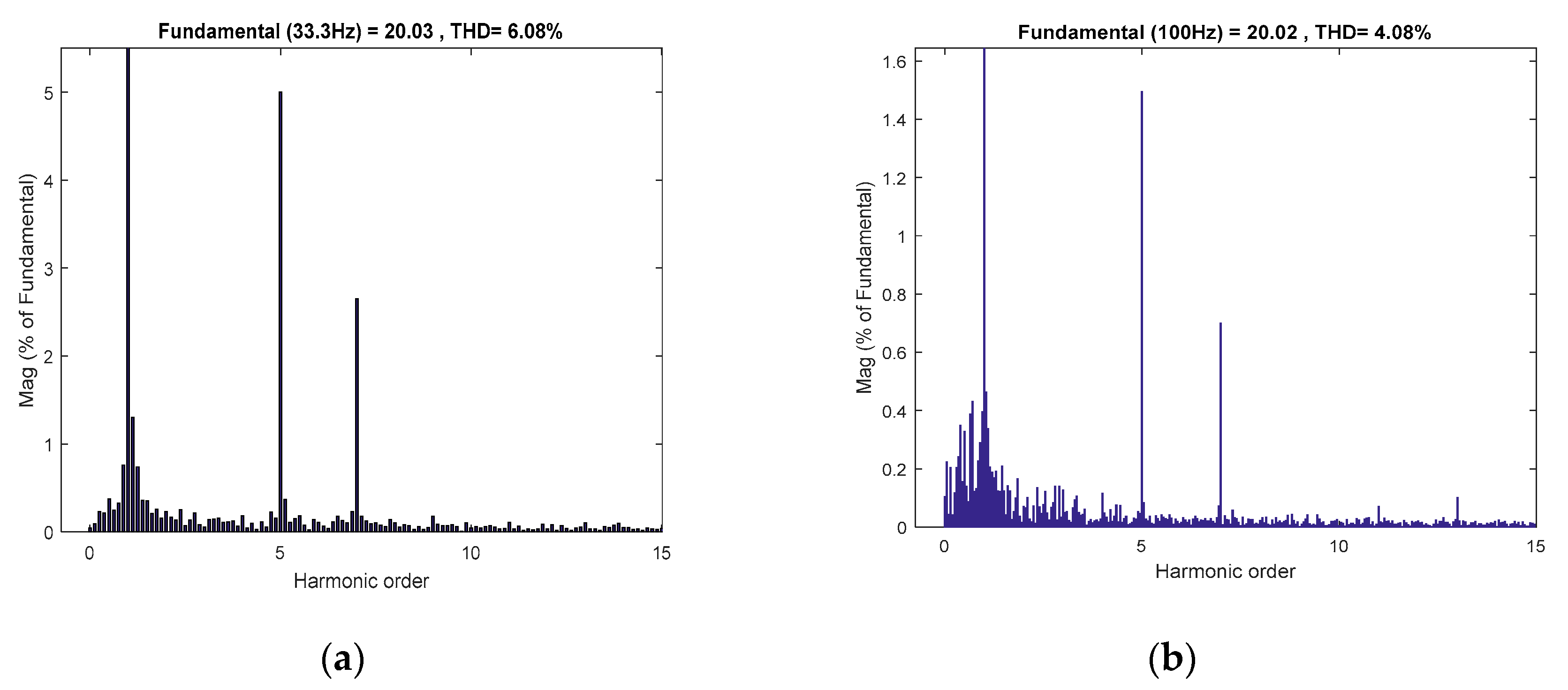
6.2. Validation of Current Regulator Design in Harmonic Subspace
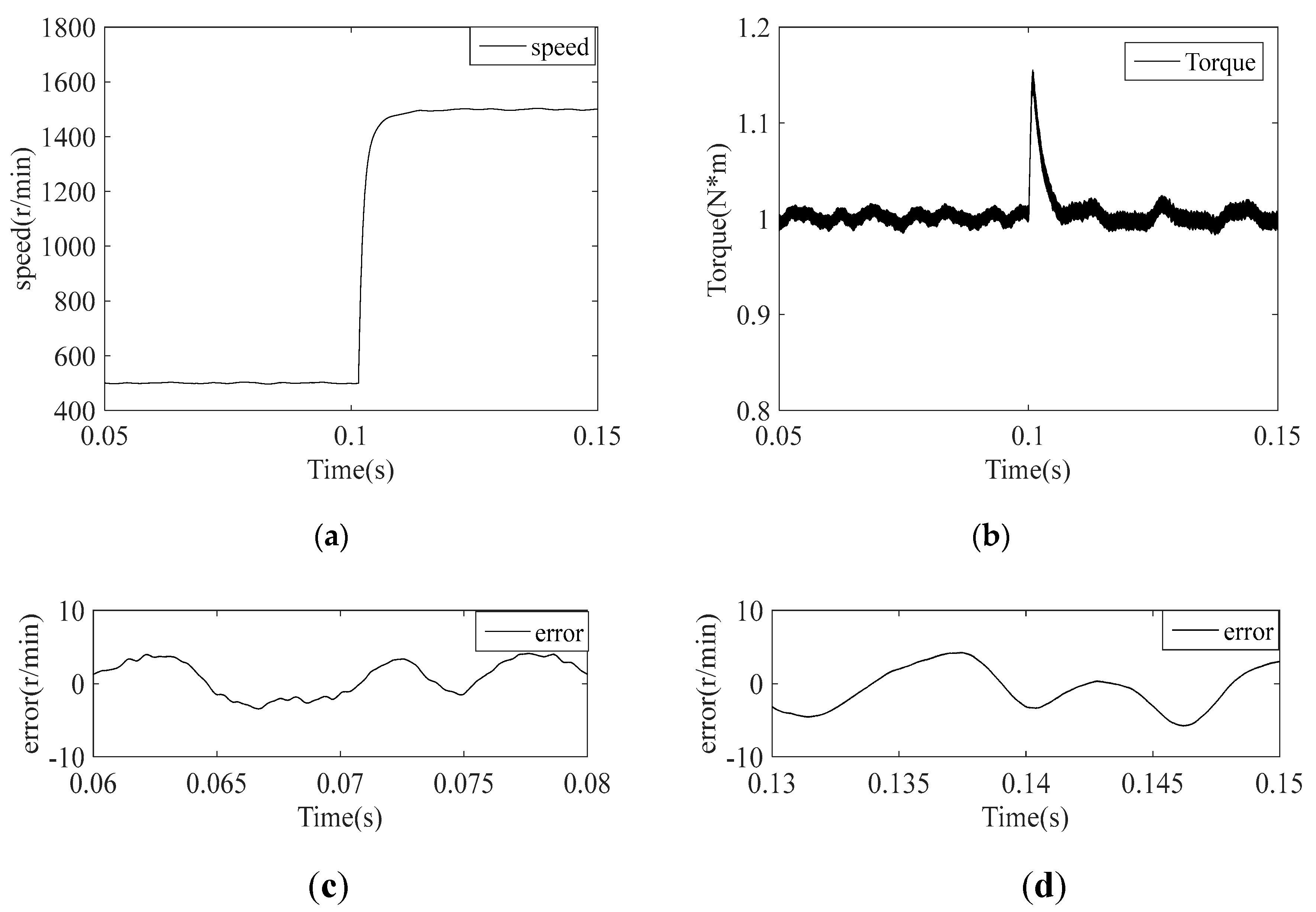
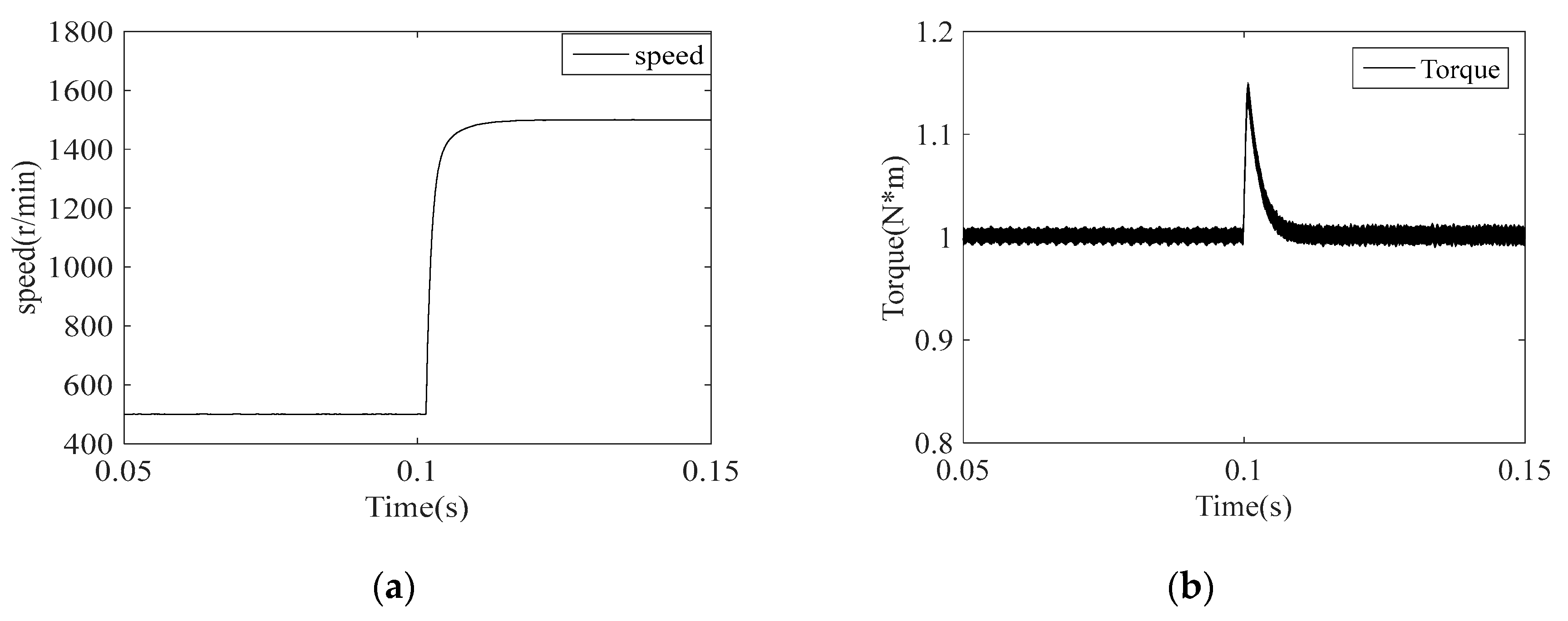
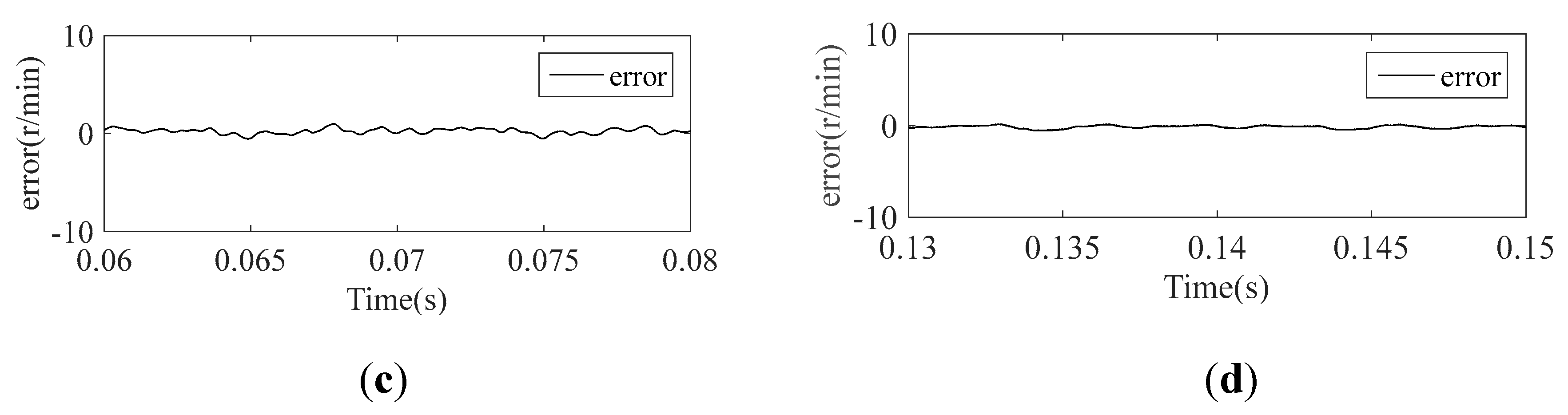
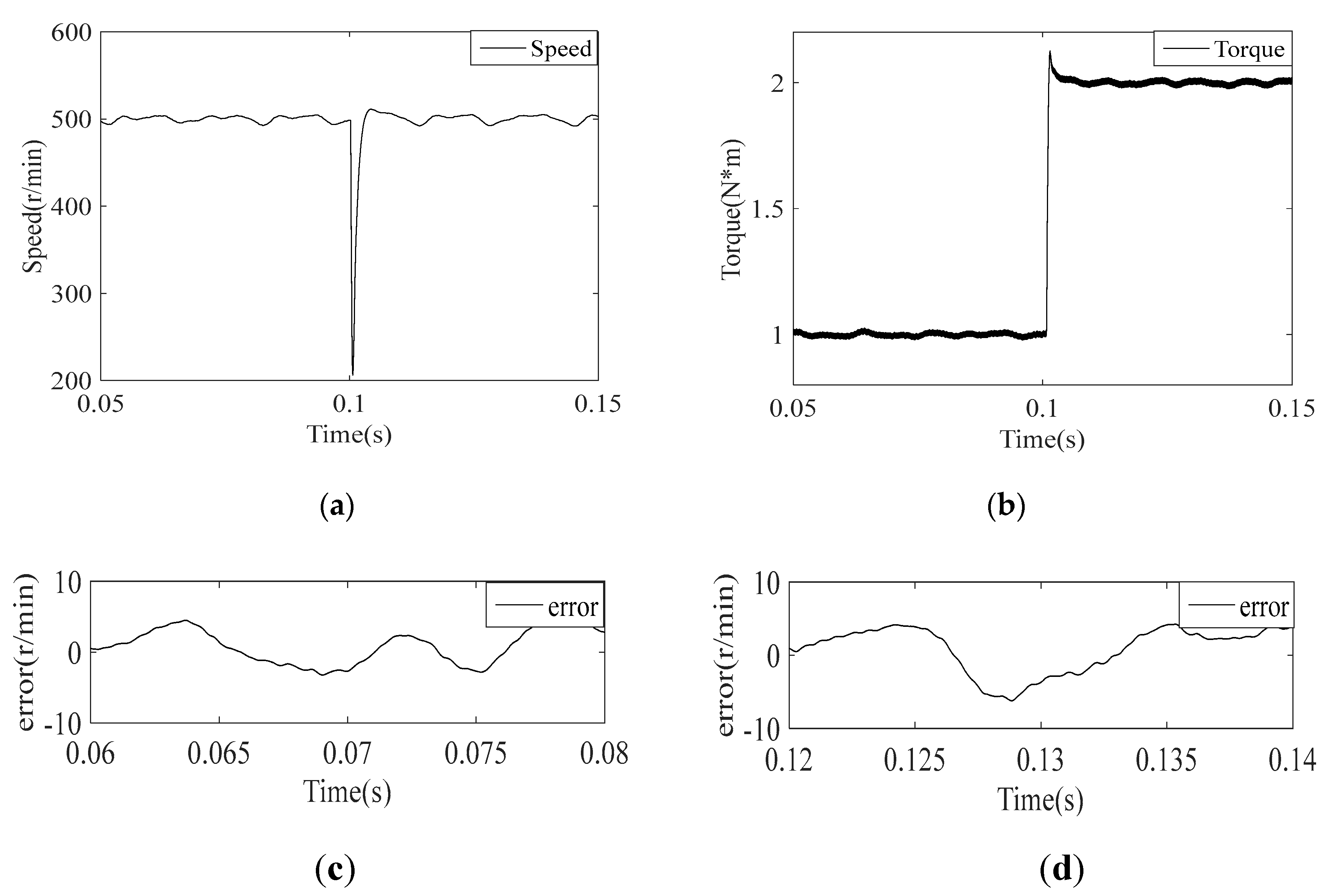
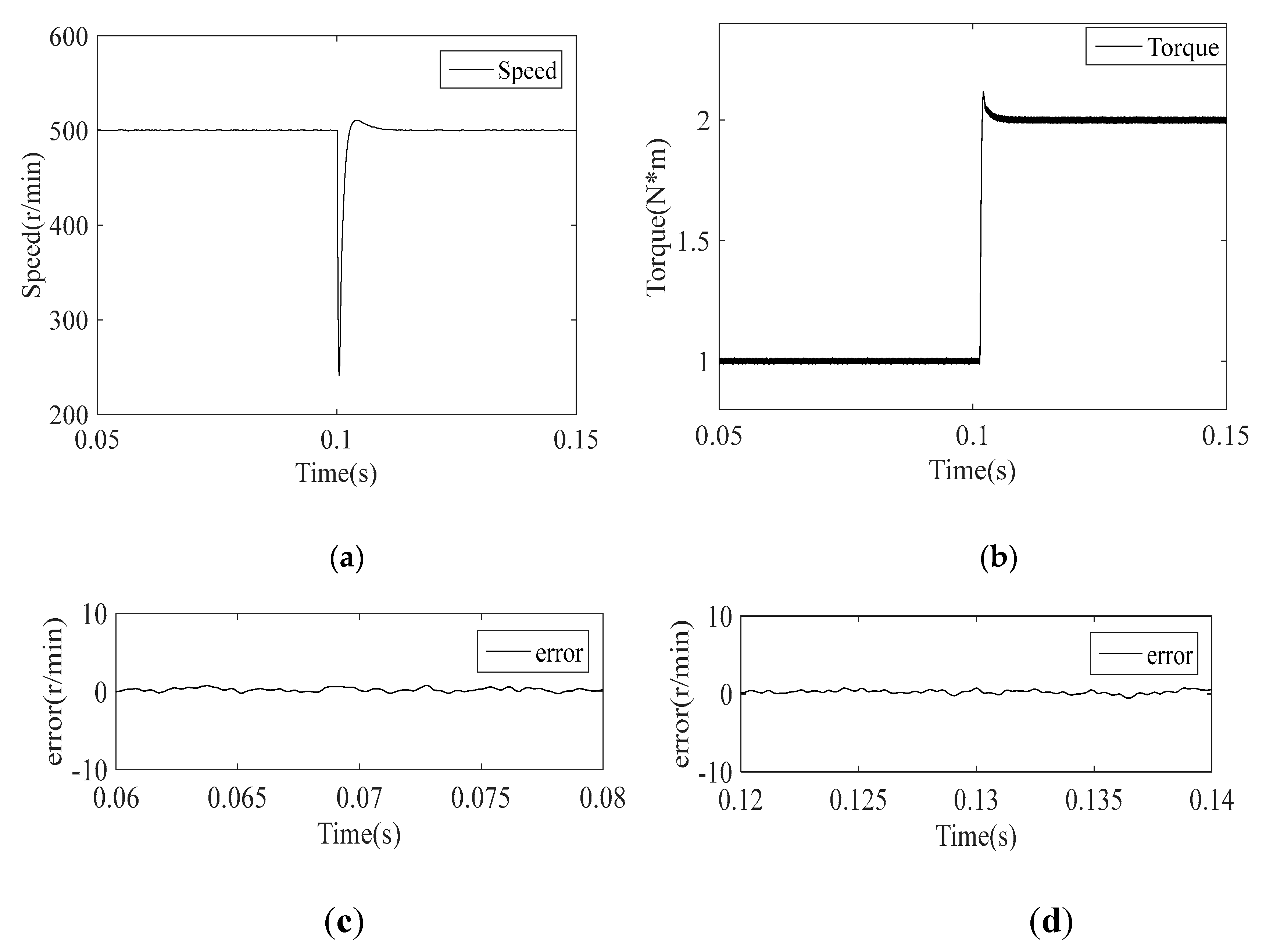
6.3. Performances under Speed Control Loop
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zheng, J.; Huang, S.; Rong, F.; Lye, M. Six-Phase Space Vector PWM under Stator One-Phase Open-Circuit Fault Condition. Energies 2018, 11, 1796. [Google Scholar] [CrossRef]
- Levi, E. Multiphase Electric Machines for Variable-Speed Applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Tounsi, K.; Djahbar, A.; Barkat, S. Extended Kalman Filter Based Sliding Mode Control of Parallel-Connected Two Five-Phase PMSM Drive System. Electronics 2018, 7, 14. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives - a technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef]
- Lipo, T.A. A d-q Model for Six Phase Induction Machines. In Proceedings of the International Conference Electrical Machine, Athens, Greece, 15–17 September 1980; pp. 860–867. [Google Scholar]
- Wu, Z.; Gu, W.; Zhu, Y.; Lu, K. Current Control Methods for an Asymmetric Six-Phase Permanent Magnet Synchronous Motor. Electronics 2020, 9, 172. [Google Scholar] [CrossRef]
- Zhao, Y.; Lipo, T.A. Space vector PWM control of dual three-phase induction machine using vector space decomposition. IEEE Trans. Ind. Appl. 1995, 31, 1100–1109. [Google Scholar] [CrossRef]
- Rowan, T.M.; Kerkman, R.J. A New Synchronous Current Regulator and an Analysis of Current-Regulated PWM Inverters. IEEE Trans. Ind. Appl 1986, IA-22, 678–690. [Google Scholar] [CrossRef]
- Harnefors, L.; Nee, H. Model-based current control of AC machines using the internal model control method. IEEE Trans. Ind. Appl. 1998, 34, 133–141. [Google Scholar] [CrossRef]
- Briz, F.; Degner, M.W.; Lorenz, R.D. Analysis and design of current regulators using complex vectors. IEEE Trans. Ind. Appl. 2000, 36, 817–825. [Google Scholar] [CrossRef]
- Holtz, J. Design of fast and robust current regulators for high-power drives based on complex state variables. IEEE Trans. Ind. Appl. 2004, 40, 1388–1397. [Google Scholar] [CrossRef]
- Peters, W.; Böcker, J. Discrete-Time Design of Adaptive Current Controller for Interior Permanent Magnet Synchronous Motors (IPMSM) with High Magnetic Saturation. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 6608–6613. [Google Scholar]
- Altomare, A.; Guagnano, A.; Cupertino, F.; Naso, D. Discrete-Time Control of High-Speed Salient Machines. IEEE Trans. Ind. Appl. 2016, 52, 293–301. [Google Scholar] [CrossRef]
- Lin, J.K. A new Approach of Dead-Time Compensation for PWM voltage inverters. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 476–483. [Google Scholar]
- Li, C. Analysis and Compensation of Dead-Time Effect Considering Parasitic Capacitance and Ripple Current. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1501–1506. [Google Scholar]
- Ryu, H.-M.; Kim, J.-W.; Sul, S.-K. Synchronous Frame Current Control of Multi-Phase Synchronous Motor —Part II Asymmetric Fault Condition due to Open Phases. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; p. 275. [Google Scholar]
- Ryu, H.-M.; Kim, J.-W.; Sul, S.-K. Synchronous Frame Current Control of Multi-Phase Synchronous Motor. Part I. Modeling and Current Control Based on Multiple d-q Spaces Concept under Balanced Condition. In Proceedings of the Conference Record of the 2004 IEEE Industry Applications Conference, 2004. 39th IAS Annual Meeting, Seattle, WA, USA, 3–7 October 2004; p. 63. [Google Scholar]
- Lascu, C.; Asiminoaei, L.; Boldea, I.; Blaabjerg, F. High Performance Current Controller for Selective Harmonic Compensation in Active Power Filters. IEEE Trans. Power Electron. 2007, 22, 1826–1835. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Lopez, Ó.; Doval-Gandoy, J. Analysis and Design of Resonant Current Controllers for Voltage-Source Converters by Means of Nyquist Diagrams and Sensitivity Function. IEEE Trans. Ind. Electron. 2011, 58, 5231–5250. [Google Scholar] [CrossRef]
- Wu, Z.; Gu, W.; Lu, K.; Zhu, Y.; Guan, J. Current Harmonic Suppression Algorithm for Asymmetric Dual Three-Phase PMSM. Appl. Sci. 2020, 10, 954. [Google Scholar] [CrossRef]
- Hadiouche, D.; Baghli, L.; Rezzoug, A. Space vector PWM Techniques for Dual Three-Phase AC Machine: Analysis, Performance Evaluation and DSP Implementation. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; Volume 1, pp. 648–655. [Google Scholar]
- Marouani, K.; Baghli, L.; Hadiouche, D.; Kheloui, A.; Rezzoug, A. A New PWM Strategy Based on a 24-Sector Vector Space Decomposition for a Six-Phase VSI-Fed Dual Stator Induction Motor. IEEE Trans. Ind. Electron. 2008, 55, 1910–1920. [Google Scholar] [CrossRef]
- Bojoi, R.; Tenconi, A.; Profumo, F.; Griva, G.; Martinello, D. Complete Analysis and Comparative Study of Digital Modulation Techniques for Dual Three-Phase AC Motor Drives. In Proceedings of the 2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference, Proceedings (Cat. No.02CH37289), Cairns, QLD, Australia, 23–27 June 2002; Volume 2, pp. 851–857. [Google Scholar]
- Zhou, C.; Yang, G.; Su, J. PWM Strategy With Minimum Harmonic Distortion for Dual Three-Phase Permanent-Magnet Synchronous Motor Drives Operating in the Overmodulation Region. IEEE Trans. Power Electron. 2016, 31, 1367–1380. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| d-axis inductance | 0.08 mH |
| q-axis inductance | 0.08 mH |
| Leakage inductance | 0.0072 mH |
| Permanent Magnet Flux | 0.005 Wb |
| Stator Resistance | 0.0113 Ω |
| Pole Pairs | 4 |
| Rated Power | 500 W |
| DC Bus Voltage | 12 V |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Gu, W.; Zhu, Y.; Lu, K.; Chen, L.; Guan, J. Current Regulator Design for Dual Y Shift 30 Degrees Permanent Magnet Synchronous Motor. Electronics 2020, 9, 777. https://doi.org/10.3390/electronics9050777
Wu Z, Gu W, Zhu Y, Lu K, Chen L, Guan J. Current Regulator Design for Dual Y Shift 30 Degrees Permanent Magnet Synchronous Motor. Electronics. 2020; 9(5):777. https://doi.org/10.3390/electronics9050777
Chicago/Turabian StyleWu, Zhihong, Weisong Gu, Yuan Zhu, Ke Lu, Li Chen, and Jianbin Guan. 2020. "Current Regulator Design for Dual Y Shift 30 Degrees Permanent Magnet Synchronous Motor" Electronics 9, no. 5: 777. https://doi.org/10.3390/electronics9050777
APA StyleWu, Z., Gu, W., Zhu, Y., Lu, K., Chen, L., & Guan, J. (2020). Current Regulator Design for Dual Y Shift 30 Degrees Permanent Magnet Synchronous Motor. Electronics, 9(5), 777. https://doi.org/10.3390/electronics9050777