LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways



Abstract
1. Introduction
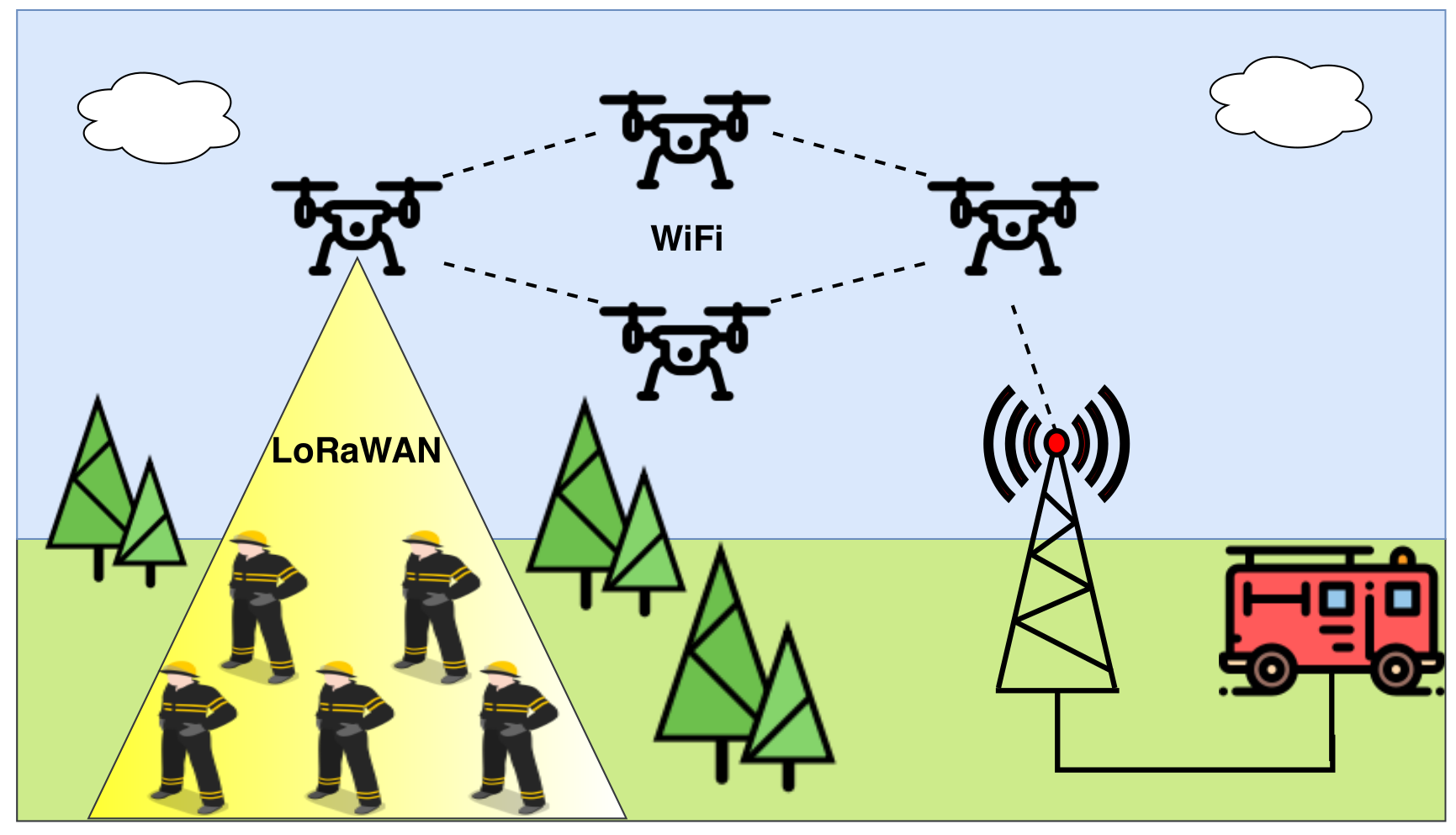
- Proposal and comparative performance evaluation of a system providing LoRaWAN coverage in wild area firefighting operations by means of a WiFi mesh of UAV gateways.
- Novel CRM and MP extensions to VSFs topology control, which are shown to significantly improve the performance of this kind of mechanism.
- Novel mobility model of wild area firefighting scenarios considered in the performance evaluation.
2. Related Work
3. The LoRaUAV System
- All UAVs fly at the same altitude in a 2D plane;
- All UAVs can move with constant speed in any direction;
- UAVs periodically exchange their position and the list of covered GNs with their neighbors;
- UAVs have access to the received power of neighboring UAVs and GNs or can estimate it based on their position;
- The position of the BS is known by all UAVs;
- The minimum data rate (and hence maximum SF) acceptable for each LoRaWAN link is a configuration parameter.
3.1. Architecture
3.2. VSF Mobility Algorithm
3.3. Connection Recovery and Maintenance (CRM) Algorithm
3.4. Movement Prediction (MP) Algorithm
4. Simulation Model
4.1. Channel Propagation Models
4.2. Firefighters Mobility Model
5. Simulation Results
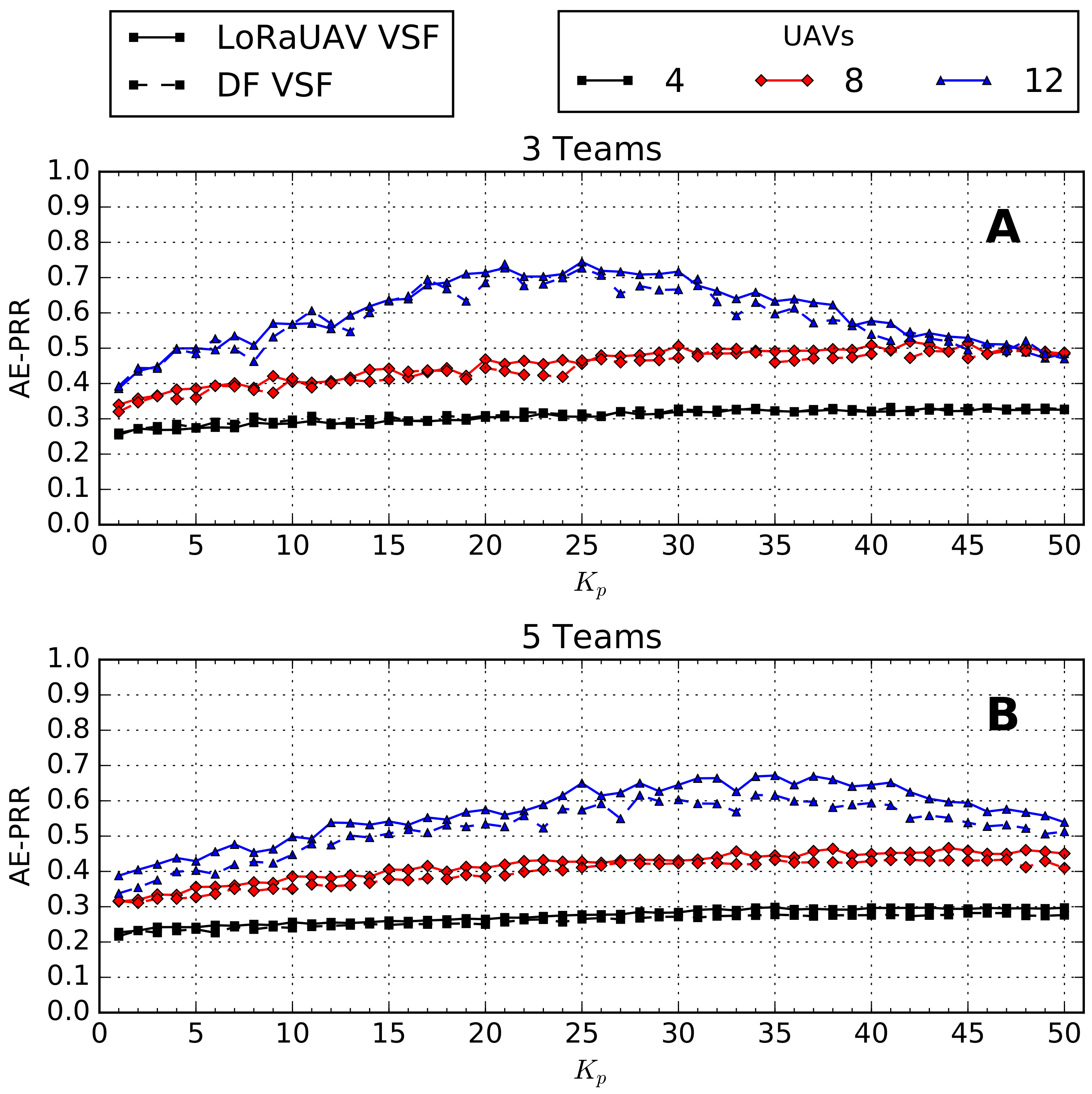
5.1. Comparison of LoRaUAV VSF and DF VSF Algorithms
5.2. Study of the Impact of the CRM Algorithm
5.3. Study of the Impact of the MP Algorithm
5.4. Frequency and Duration of Disconnections
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low Power Wide Area Networks: An Overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef]
- LoRa Modulation Basics. Available online: https://www.semtech.com/uploads/documents/an1200.22.pdf (accessed on 3 June 2018).
- LoRaWAN 1.1 Specification. Available online: https://lora-alliance.org/sites/default/files/2018-04/lorawantm_specification_-v1.1.pdf (accessed on 3 June 2018).
- Felice, M.D.; Trotta, A.; Bedogni, L.; Chowdhury, K.R.; Bononi, L. Self-organizing aerial mesh networks for emergency communication. In Proceedings of the 2014 IEEE 25th Annual International Symposium on Personal, Indoor and Mobile Radio Communication (PIMRC), Washington, DC, USA, 2–5 September 2014; pp. 1631–1636. [Google Scholar]
- Caillouet, C.; Razafindralambo, T. Efficient deployment of connected unmanned aerial vehicles for optimal target coverage. In Proceedings of the 2017 Global Information Infrastructure and Networking Symposium (GIIS), St. Pierre, France, 25–27 October 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Sabino, S.; Horta, N.; Grilo, A. Centralized Unmanned Aerial Vehicle Mesh Network Placement Scheme: A Multi-Objective Evolutionary Algorithm Approach. Sensors 2018, 18, 4387. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Lee, J. Integrated Topology Management in Flying Ad Hoc Networks: Topology Construction and Adjustment. IEEE Access 2018, 6, 61196–61211. [Google Scholar] [CrossRef]
- Almeida, E.N.; Campos, R.; Ricardo, M. Traffic-aware multi-tier flying network: Network planning for throughput improvement. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Basu, P.; Redi, J.; Shurbanov, V. Coordinated flocking of UAVs for improved connectivity of mobile ground nodes. In Proceedings of the IEEE Military Communications Conference (MILCOM), Monterey, CA, USA, 31 October–3 November 2004; pp. 1628–1634. [Google Scholar]
- Goddemeier, N.; Daniel, K.; Wietfeld, C. Role-Based Connectivity Management with Realistic Air-to-Ground Channels for Cooperative UAVs. IEEE J. Sel. Areas Commun. 2012, 30, 951–963. [Google Scholar] [CrossRef]
- Trotta, A.; Felice, M.D.; Bedogni, L.; Bononi, L.; Panzieri, F. Connectivity recovery in post-disaster scenarios through Cognitive Radio swarms. Comput. Netw. 2015, 91, 68–89. [Google Scholar] [CrossRef]
- Reynaud, L.; Guérin-Lassous, I. Design of a force-based controlled mobility on aerial vehicles for pest management. Ad Hoc Netw. 2016, 53, 41–52. [Google Scholar] [CrossRef]
- Reynaud, L.; Guérin-Lassous, I. Improving the Performance of Challenged Networks with Controlled Mobility. Mob. Netw. Appl. 2018, 23, 1270–1279. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. A k-means clustering algorithm. JSTOR Appl. Stat. 1979, 28, 100–108. [Google Scholar] [CrossRef]
- Arthur, D.; Vassilvitskii, S. K-means++: The Advantages of Careful Seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, Society for Industrial and Applied Mathematics, Philadelphia, PA, USA, 7–9 January 2007; pp. 1027–1035. [Google Scholar]
- ns-3. Available online: https://www.nsnam.org/ (accessed on 21 September 2018).
- Magrin, D.; Centenaro, M.; Vangelista, L. Performance evaluation of LoRa networks in a smart city scenario. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Khuwaja, A.; Chen, Y.; Zhao, N.; Alouini, M.S.; Dobbins, P. A Survey of Channel Modeling for UAV Communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Iova, O.; Murphy, A.; Picco, G.; Ghiro, L.; Molteni, D.; Ossi, F.; Cagnacci, F. LoRa from the City to the Mountains: Exploration of Hardware and Environmental Factors. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017; pp. 317–322. [Google Scholar]
- National Wildfire Coordinating Group. Wildland Fire Suppression Tactics Reference Guide; National Interagency Fire Center: Boise, ID, USA, 1996. [Google Scholar]
- Tymstra, C.; Flannigan, M. Living with Wildland Fire: What we Learned from the 2016 Horse River Wildfire. Available online: https://www.frames.gov/files/9615/1190/3222/2017_November_21_Alaska_Fire_Science_Consortium_webinar_Tymstra_Flannigan.pdf (accessed on 11 July 2018).
- Jacquet, P.; Muhlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, L. Optimized link state routing protocol for ad hoc networks. In Proceedings of the IEEE International Multi Topic Conference, Technology for the 21st Century, Lahore, Pakistan, 30 December 2001; pp. 62–68. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LoRaWAN | WiFi and Routing | ||
|---|---|---|---|
| GN Tx Power | 14 dBm | PHY protocol | IEEE 802.11g |
| Class | Class A | Modulation | ERP-OFDM |
| Bandwidth | 125 kHz | Frequency | 2.4 GHz |
| Frequency | 868.1 MHz | Tx Power | 16.02 dBm |
| SF | 7 | Rx Sens. | −99 dBm |
| GW Sens. (dBm) | −124 (SF 7) | Bitrate | 12 Mbps |
| Packet size | 10 bytes | MANET protocol | OLSR |
| Packet period | 30 s | ||
| VSF Algorithm | CRM Algorithm | ||
| 10 s | 30 | ||
| 40 s | 0.5 | ||
| 20 dbm | 3 min | ||
| MP Algorithm | Firefighter Mobility Model | ||
| 3 min | 300 m | ||
| 40 s | 100 m | ||
| 10 min | m | ||
| 3 | 5 min | ||
| 0.6 | BS position | ||
| N. of UAVs | |
| N. of teams | 1-5 |
| GNs per team | 20 |
| Sim. Time | 2000 s |
| Area side | 2000 m |
| No Split | |||||
|---|---|---|---|---|---|
| UAVs | Runs | Avg MP PRR Gain/loss | |||
| Better w/ MP | Better w/o MP | Better w/ MP | Better w/o MP | ||
| 4 | 58% | 42% | +2.1% | −1.5% | |
| 6 | 53% | 47% | +9.0% | −7.1% | |
| 8 | 66% | 34% | +13% | −6.6% | |
| 10 | 77% | 23% | +15% | −7.0% | |
| 12 | 86% | 14% | +18% | −4.0% | |
| Split | |||||
| UAVs | Runs | Avg MP PRR Gain/loss | |||
| Better w/ MP | Better w/o MP | Better w/ MP | Better w/o MP | ||
| 4 | 78% | 22% | +4.3% | −2.4% | |
| 6 | 71% | 29% | +8.9% | −5.9% | |
| 8 | 69% | 31% | +11% | −5.8% | |
| 10 | 78% | 22% | +11% | −5.2% | |
| 12 | 91% | 9% | +15% | −1.9% | |
| Parameter | Values |
|---|---|
| Number of UAVs | 12 |
| Number of teams | 3 |
| GNs per team | 20 |
| 25 | |
| Total simulation time | 3000 s |
| Simulation area | m |
| Algorithm | Total Average Disconnection Time (s) |
|---|---|
| DF VSF | 23,199 ± 3350 |
| LoRaUAV VSF | 21,826 ± 2976 |
| LoRaUAV VSF + CRM | 12,365 ± 2258 |
| LoRaUAV VSF + CRM + MP | 11,876 ± 1600 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stellin, M.; Sabino, S.; Grilo, A. LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways. Electronics 2020, 9, 630. https://doi.org/10.3390/electronics9040630
Stellin M, Sabino S, Grilo A. LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways. Electronics. 2020; 9(4):630. https://doi.org/10.3390/electronics9040630
Chicago/Turabian StyleStellin, Marco, Sérgio Sabino, and António Grilo. 2020. "LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways" Electronics 9, no. 4: 630. https://doi.org/10.3390/electronics9040630
APA StyleStellin, M., Sabino, S., & Grilo, A. (2020). LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways. Electronics, 9(4), 630. https://doi.org/10.3390/electronics9040630