Design and Control of a DC Collection System for Modular-Based Direct Electromechanical Drive Turbines in High Voltage Direct Current Transmission




Abstract
1. Introduction
1.1. Literature Reviews and Research Gaps
1.2. Contributions
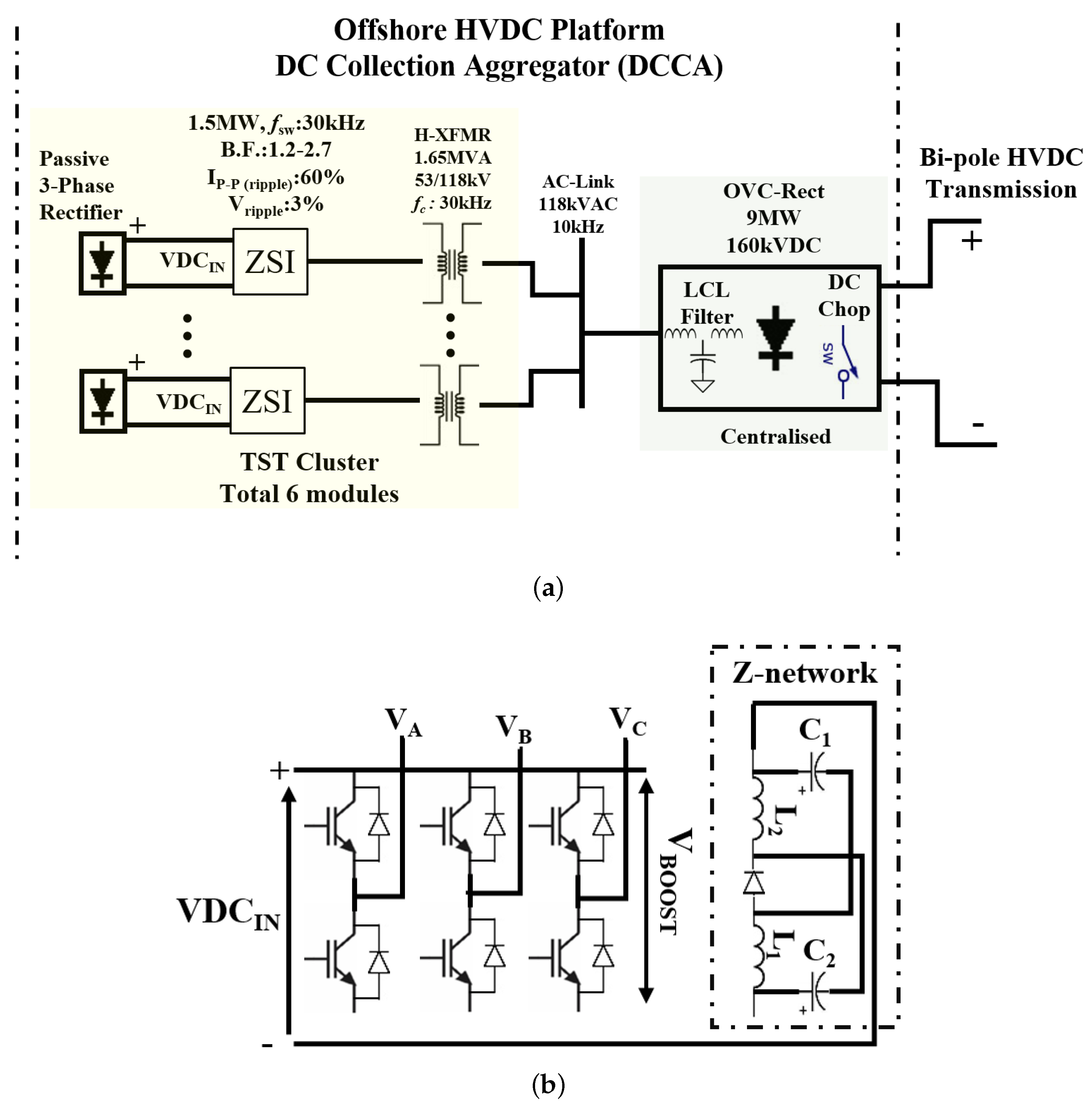
- Modelling of DC Collection Aggregator (DCCA) that serves as the aggregated tidal energy conversion system for multiple parallel-connected direct drive TSTs before coupling to the bi-pole HVDC transmission network. The innovation involves using the sole impedance source inverter (ZSI) that employs solid state transformer technology to support operation variations of clustered TSTs and gains synchronisation at the mutual AC-link (frequency and voltage level). The ZSI’s voltage control operation uses a PI controller to secure a constant AC voltage level at AC-link, ordering strategic pulse-width modulation (PWM) signals on switching devices to order a corresponding boosting factor at the impedance source. The DCCA is then coupled to the HVDC transmission along with other TST clusters in parallel to avoid cascading failure when random TSTs experience malfunctions.
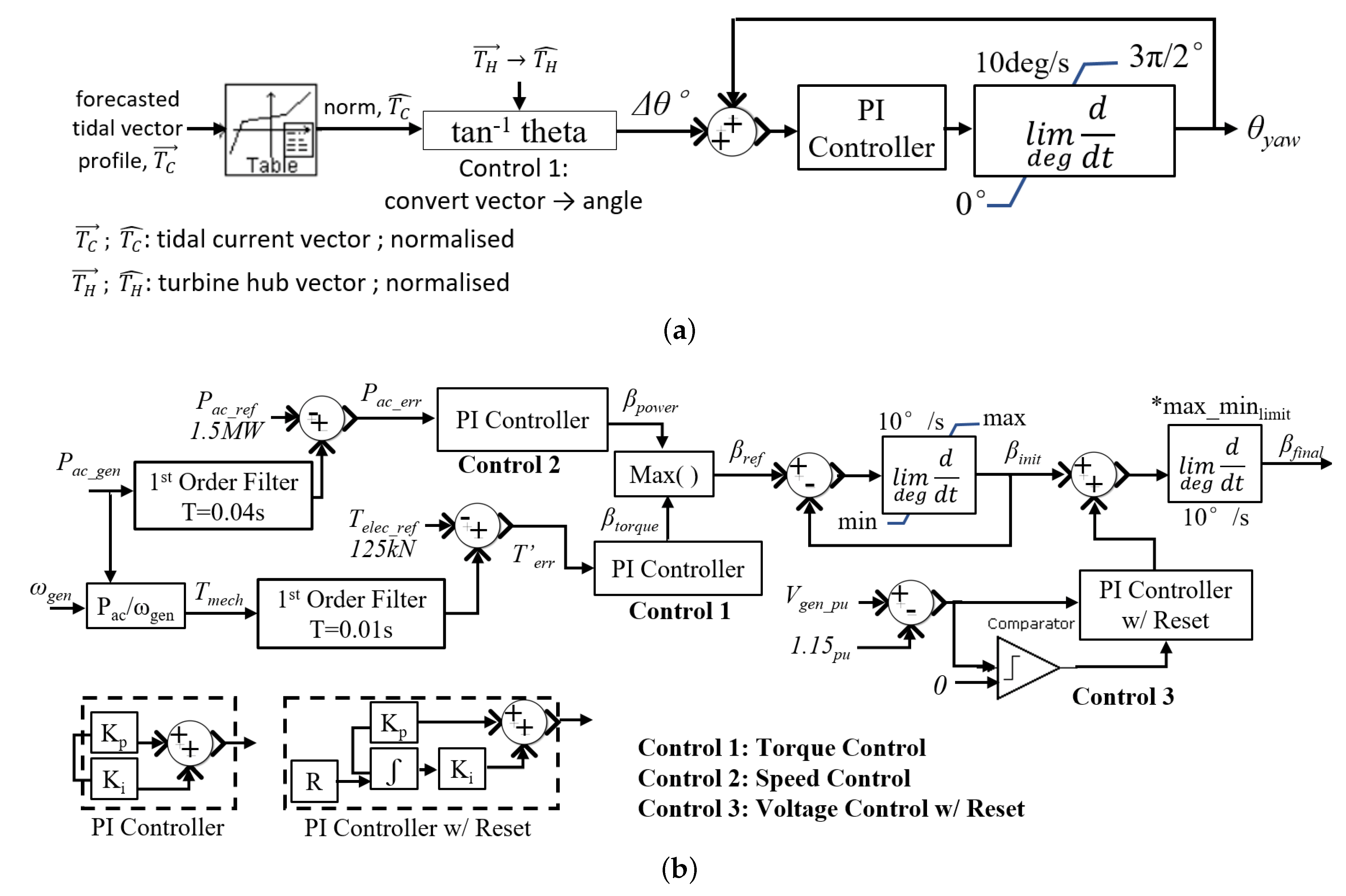
- Design torque-based blade pitch controller that operates close to MPPT to accommodate Volt/Watt function and better generator start-up profile. The purpose of reserving active power generation is to support an under-voltage crisis during low-speed rotor operation (high torque), which is compatible for tidal current physiques.
2. Proposed Testbed System: HVDC Transmission for Offshore 90 MW Tidal Stream Farm
2.1. Tidal Stream Turbine
2.2. Uncertainty and Disturbance Affecting Tidal Stream Turbine Operation
2.3. Tidal Stream Turbine Generator Set
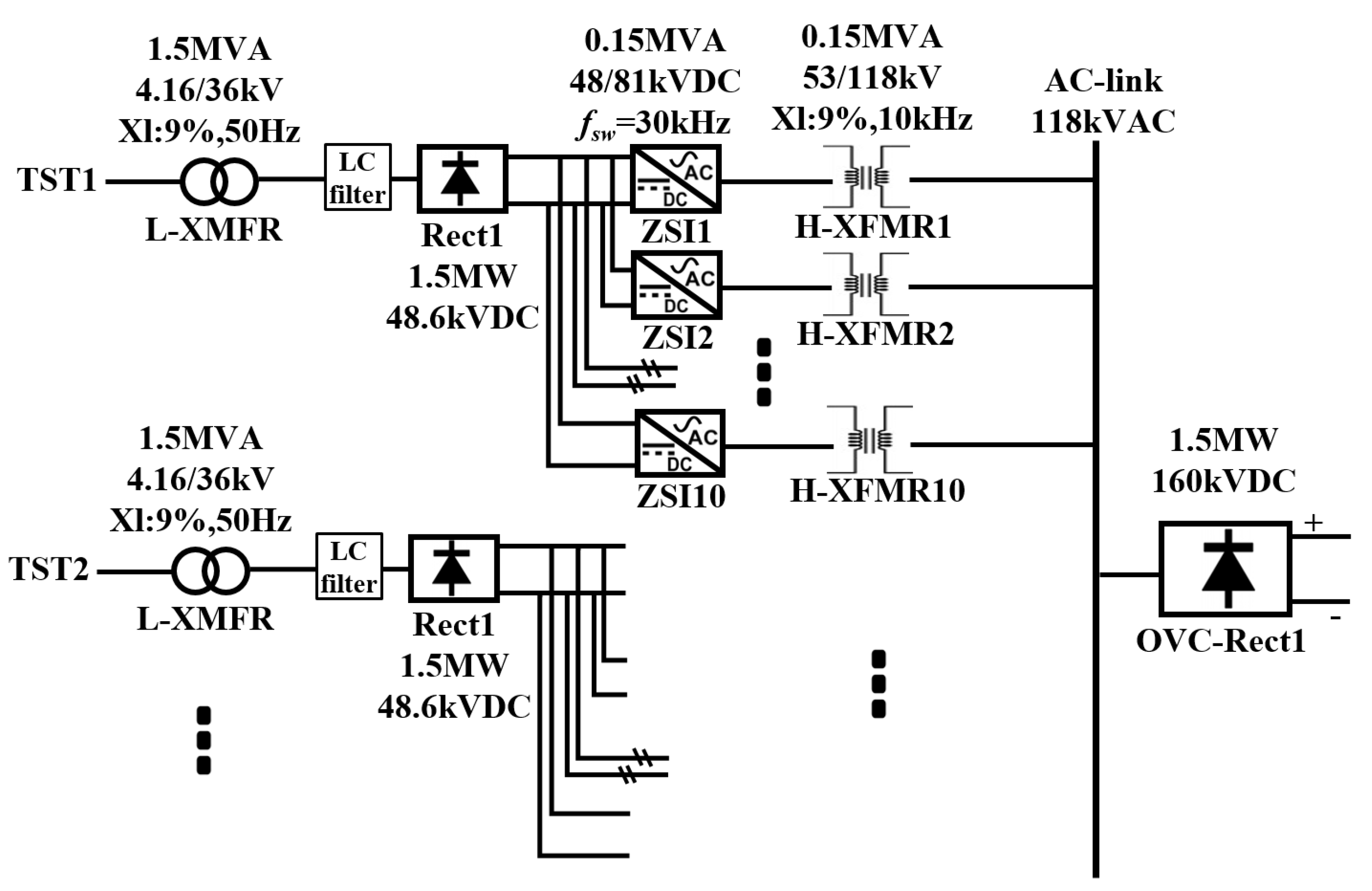
2.4. DC Collection Aggregator: Connecting Clustered Direct Drive TSTs to HVDC Transmission
2.5. High Frequency Transformer
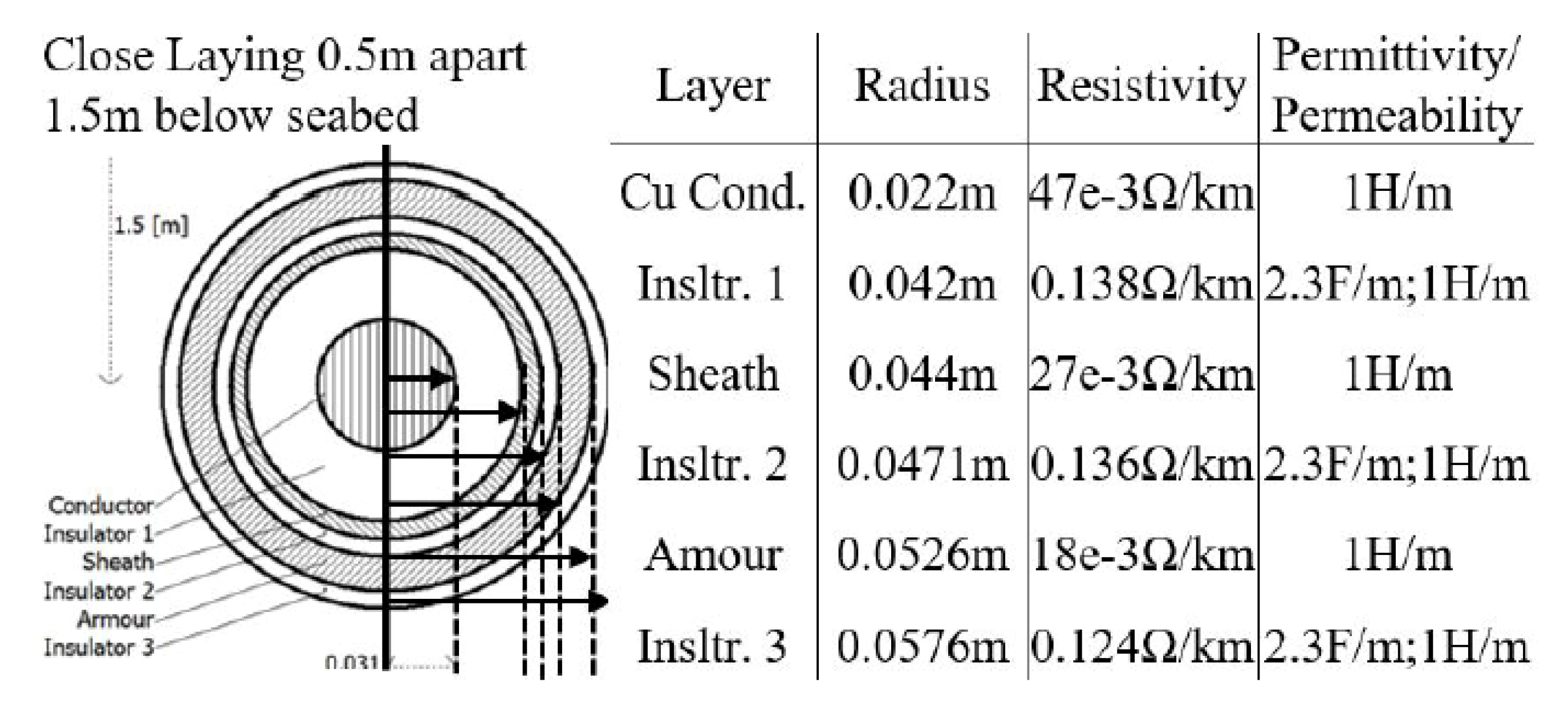
2.6. Submarine Power Cable (Single Core)
3. Proposed Control Algorithms
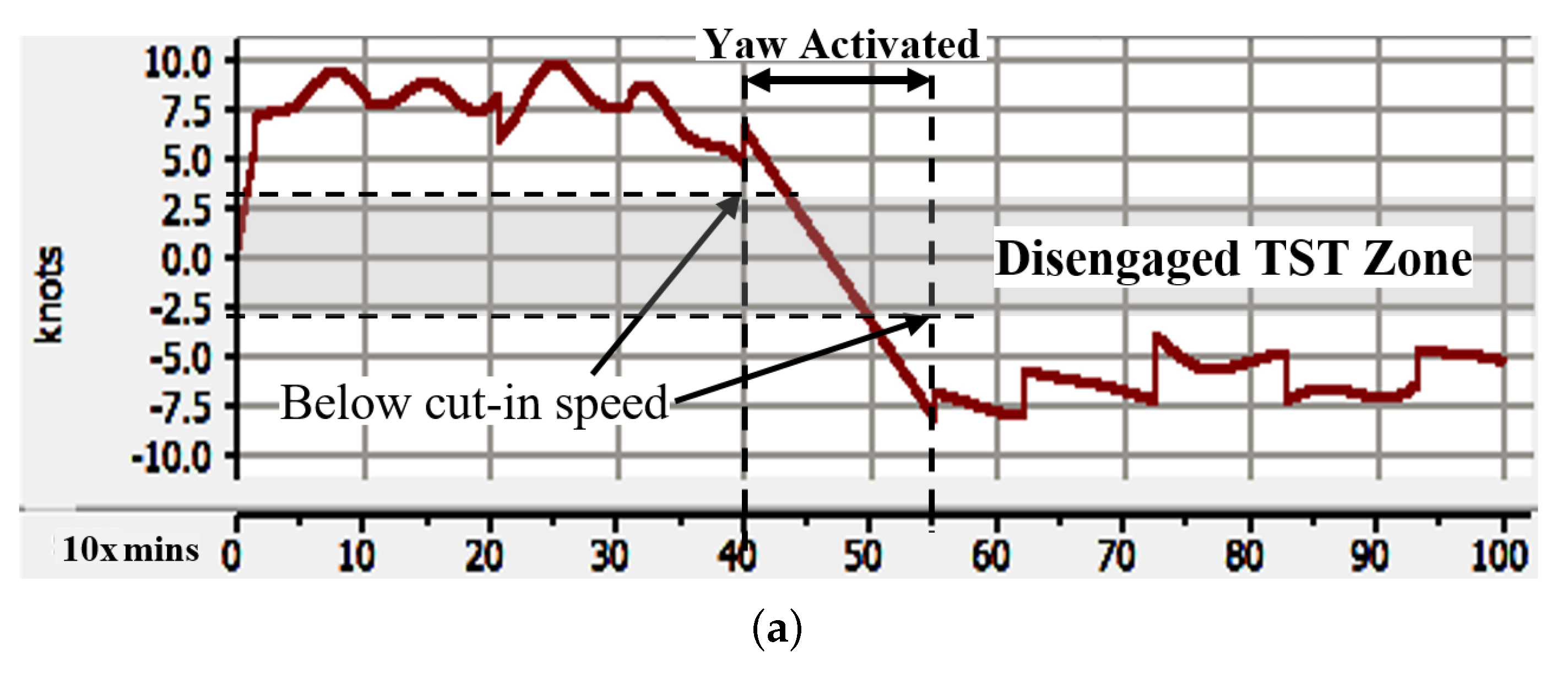
3.1. Turbine Dynamic Blade Pitch and Yaw Controller
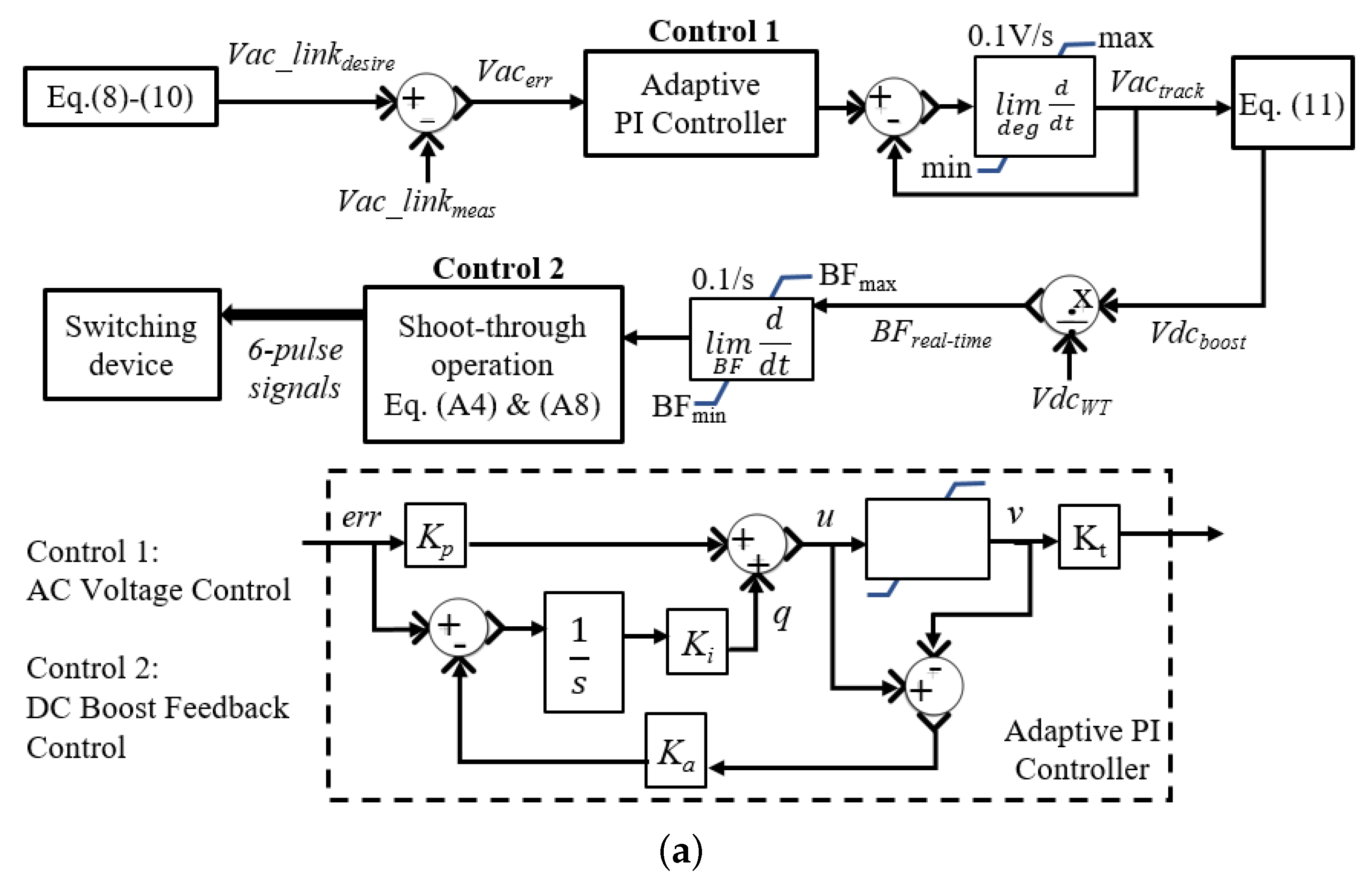
3.2. DC Collection Aggregator (DCCA) Controller
- (i)
- Formulations in determining Z-capacitor and Z-inductor ratings in the Z-network are strictly dependent on the required Boosting Factor (BF) and inverter’s switching frequency when generating desirable DC boost voltage level (average), . However, it is unrealistic to alter passive component values in real time to preserve constant as BF will deviate constantly in response to the uncontrolled DC voltage generated at TST, . Nevertheless, through investigations, a trend was observed on the Z-network’s efficiency where it is permissible to retain inductance and capacitance values without having level be clipped. The key is to identify BF limits against the available region/range before finalising the appropriate AC voltage at AC-link as a reference voltage:s.t. following constraints:
- (ii)
- Strategical selection of AC voltage level as reference is required to avoid voltage divergence at AC-link, . Label (4) formulates fitting AC voltage level at AC-link taking the consideration of 3% voltage ripple during the shoot-through operation. In addition, it was considered to take the minimum BF when assigning the reference AC voltage in order to anticipate shortfall during instances where WT’s mechanical speed decreases due to low wind speed input.
- (iii)
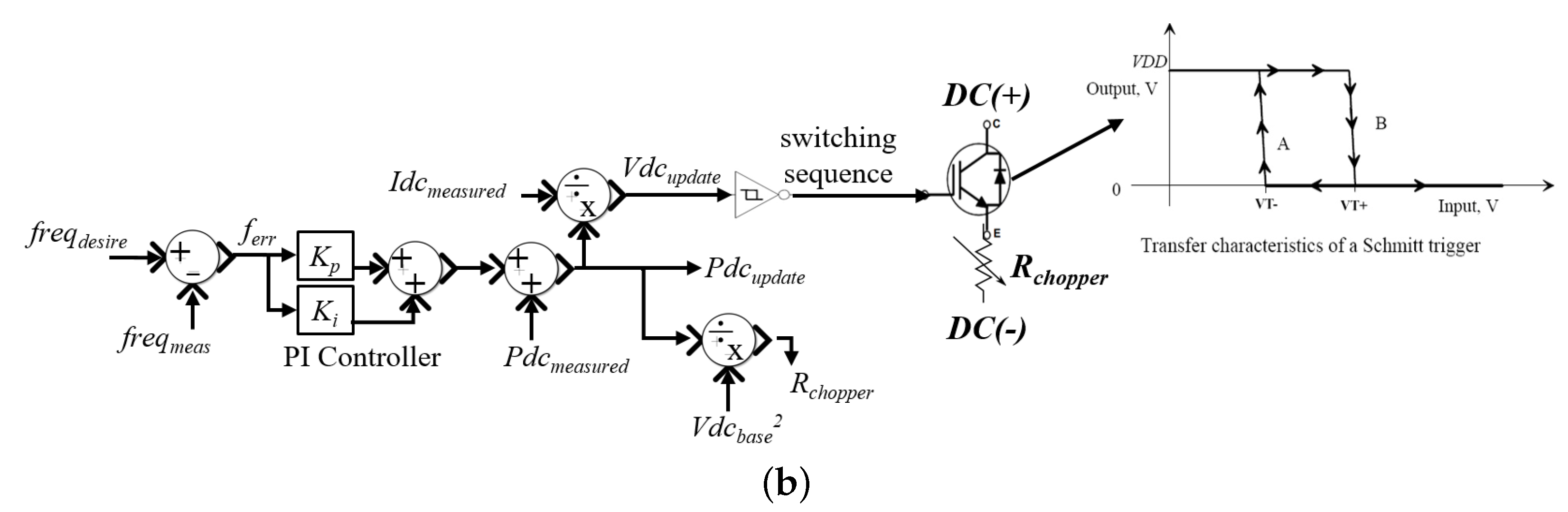
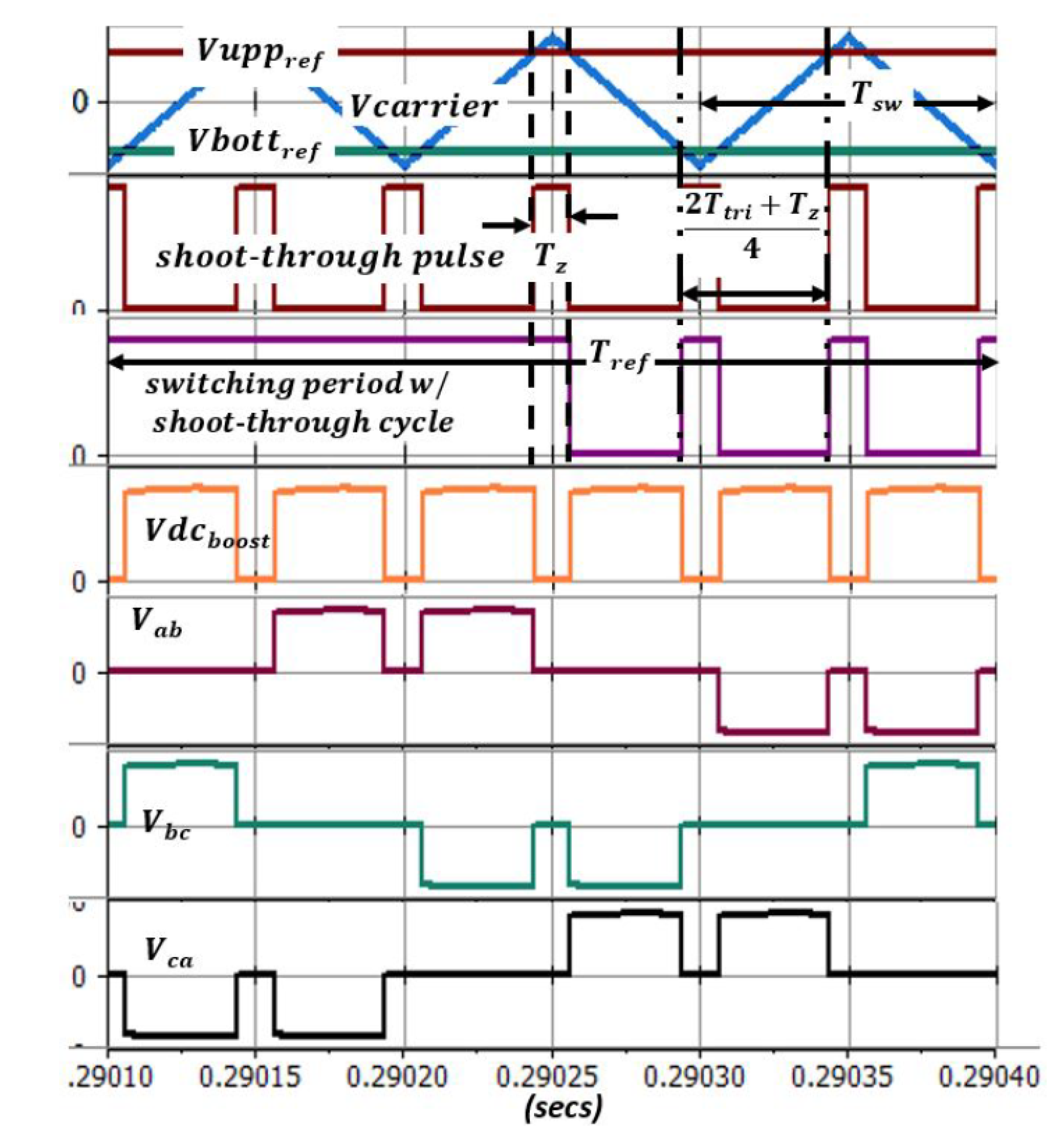
- The DC Boost Feedback Controller was designed to direct 6-pulse PWM signals ordained by BF in real time. It influences the shoot-through period given in Label (A6). Subsequently, engaging Label (A7), the updated PWM signals were generated provoking the switching operations of the inverter to create voltage surge that charges up the Z-network for boosting proceedings.
- (iv)
- It can be seen that the AC Voltage Controller uses an adaptive PI compensator that uses back-calculation algorithm to prevent continual increment of input. Thus, in the linear range, the integrated error and the difference between saturated and unsaturated signals serves as feedback that controls the integral state in the saturation region defined in Label (6). Here, constant AC-Link voltage level is secured by ordering required magnitude through BF manipulations based on capricious ratings:When employing a back-calculation algorithm, accidental reset of integrator due to input saturation caused by malicious interpretation of error is alleviated. The integral state will be reduced along with its time constant when PI controller’s output gets saturated. It provides negative feedback from the controller’s output, else the integral state accrues the AC voltage error and initiates conventional PI proceeding.
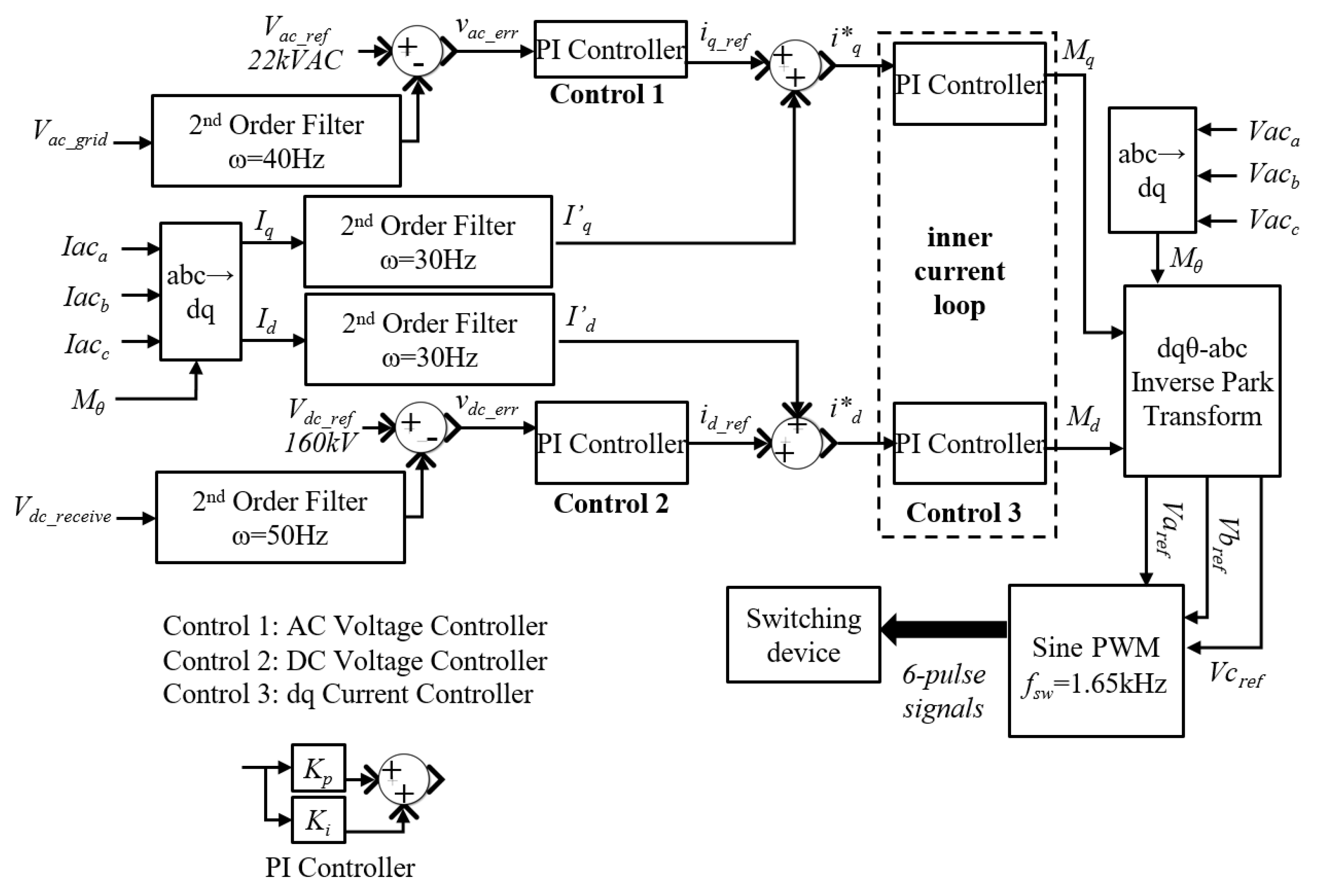
3.3. Grid-Side Voltage Source Converter Controller
4. Cluster Sizing and Capital Investments
4.1. Inferences in Adopting Large Scale TST Operations
4.2. Cost Benefits’ Comparisons
5. Simulation Results
- (i)
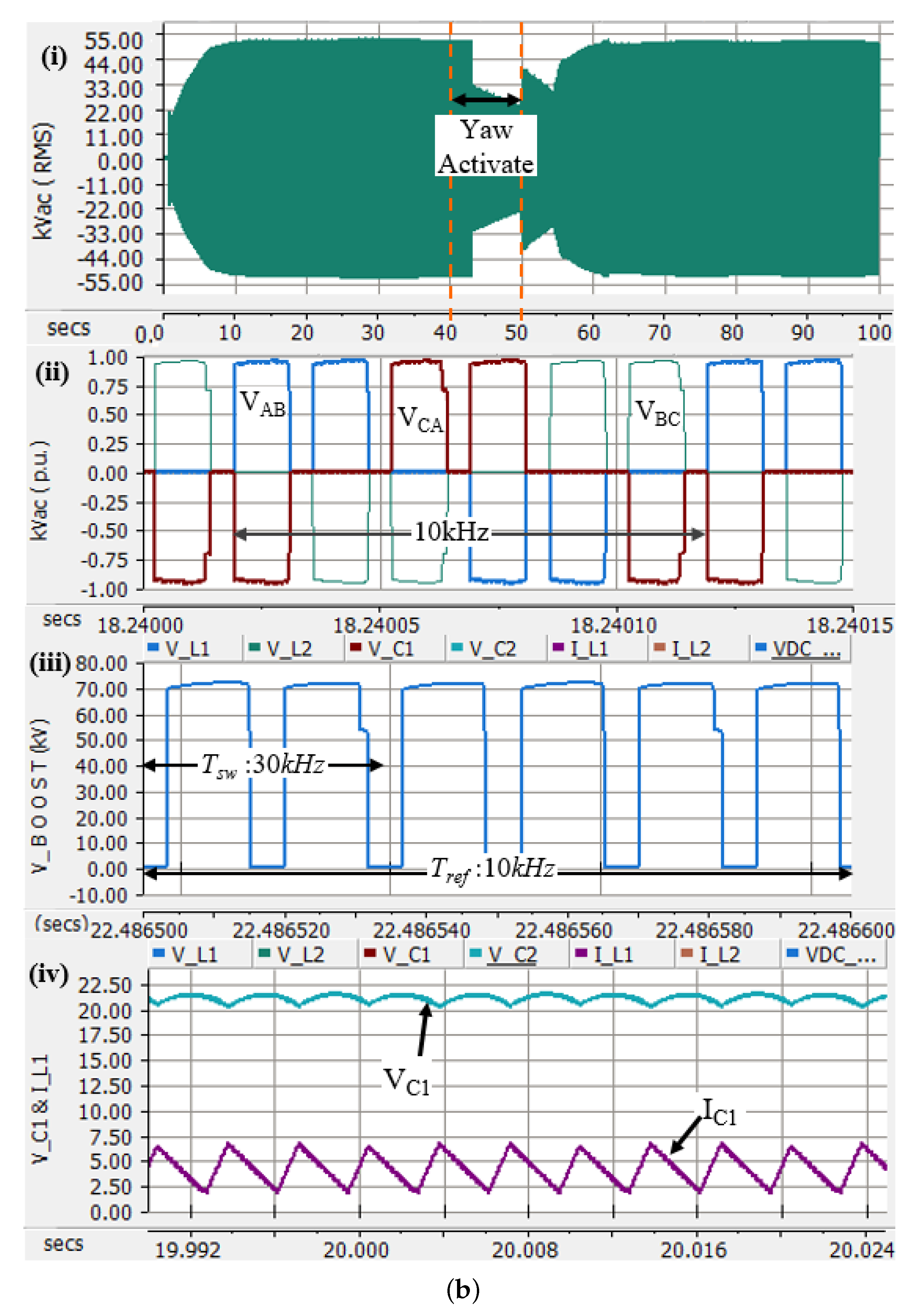
- DCCA in governing tidal energy conversion system—Transient and performance analyses, inspecting frequency and voltage qualities in directing direct drive PMSG variable against a real-time tidal current profile [33]. Conjointly, analyses on the proposed adaptive PI controller in ZSI and blade pitch controller were presented governing prescribed ratings at DCCA’s AC-Link busbar.
- (ii)
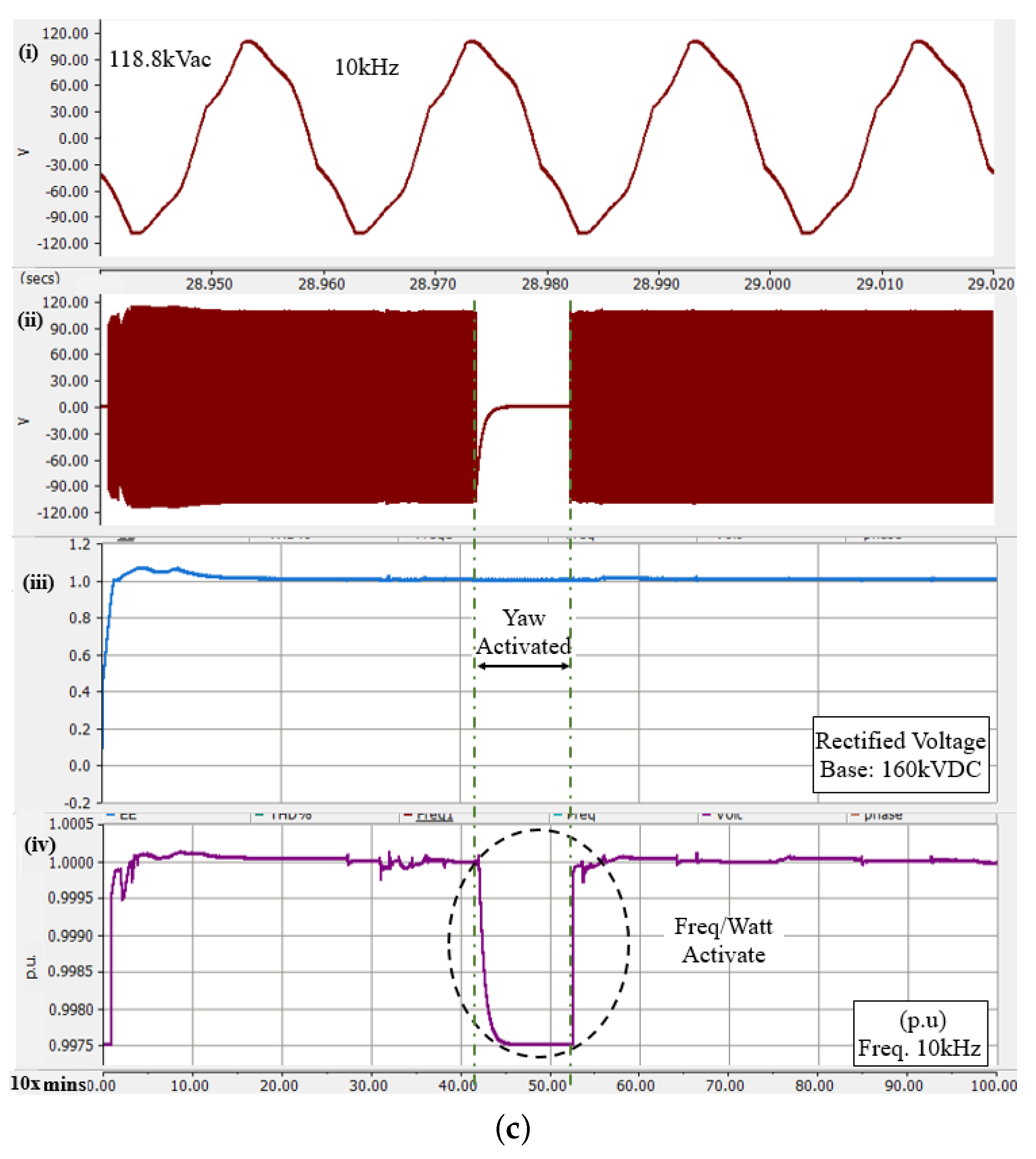
- Transient at PCC coupled to the 22 kVAC distribution network—Here, investigations were focused on the HVDC transmission, both sending- and receiving-ends in relations to power delivery administrations and satisfying ride-through capability along with dynamic voltage support requirements. The analyses then advances towards the grid-side VSC in legislating synchronicity with the 22 kVAC power grid.
- (iii)
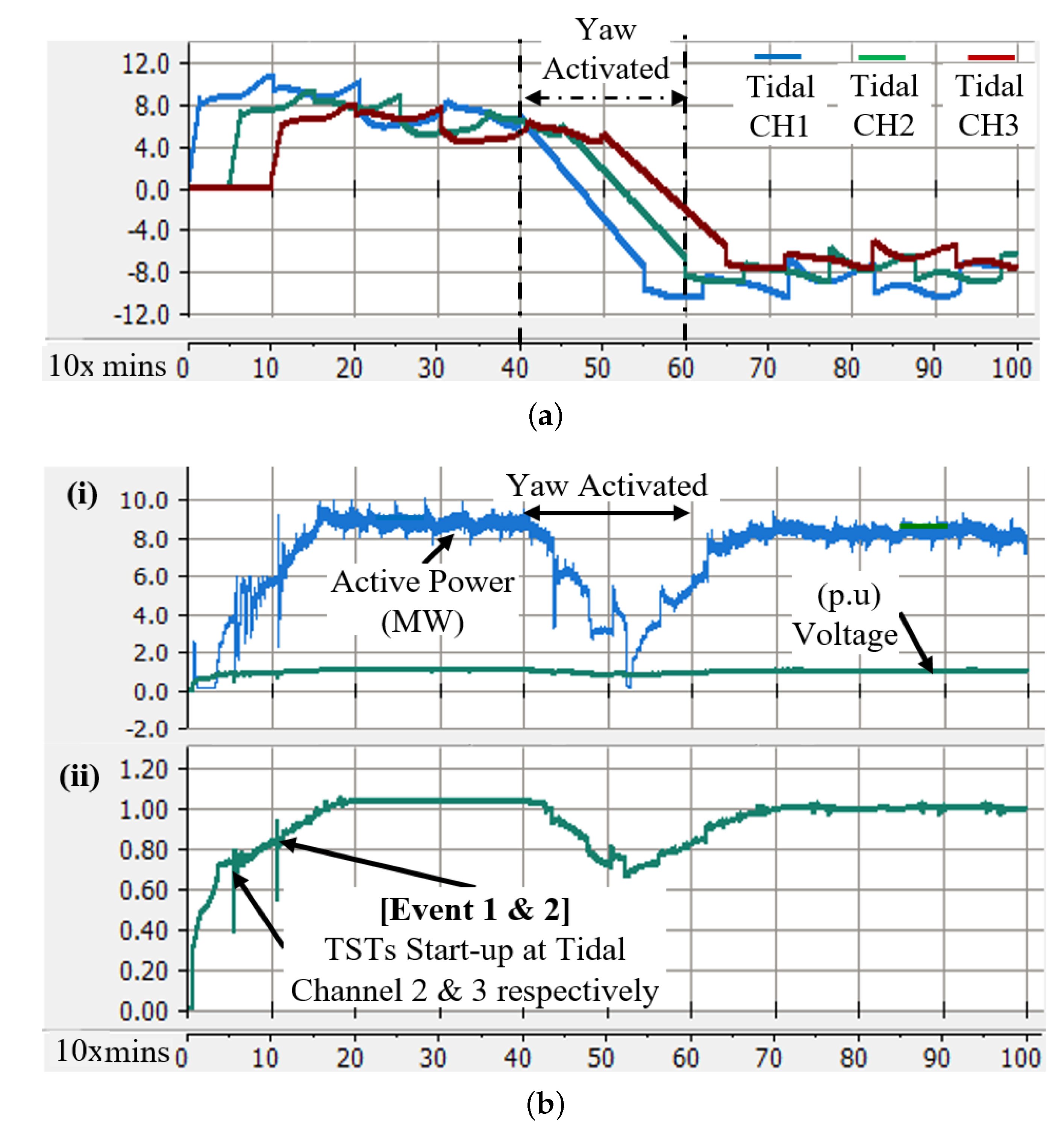
- Random Offline TSTs—Investigates transient responses and grid synchronicity quality when random TSTs go offline.
5.1. Evaluating Single TST Operations Based on Proposed Control Strategy in DCCA
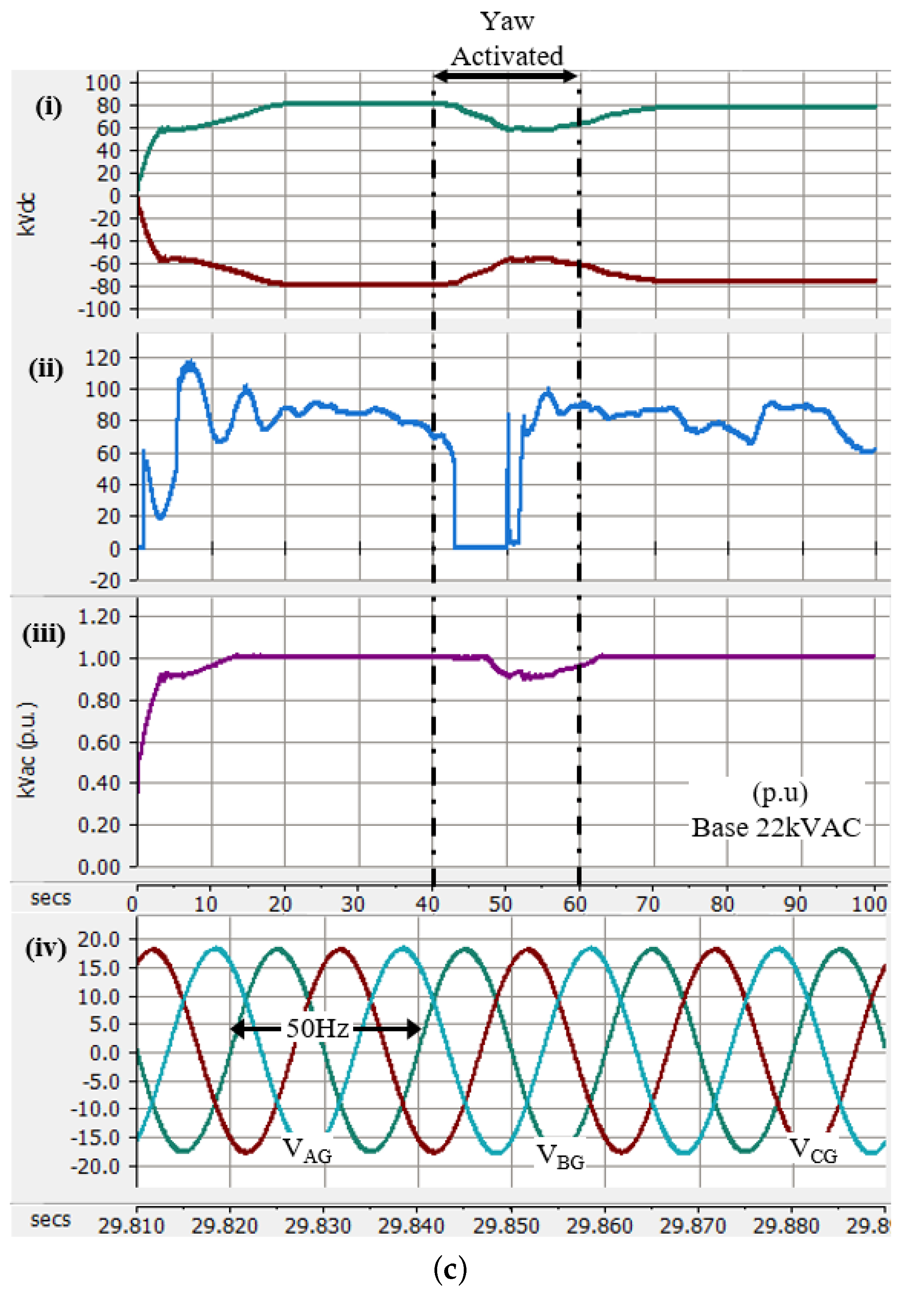
5.1.1. Torque-Controlled Blade Pitching and Yawing Administrations: Constant Tidal Speed
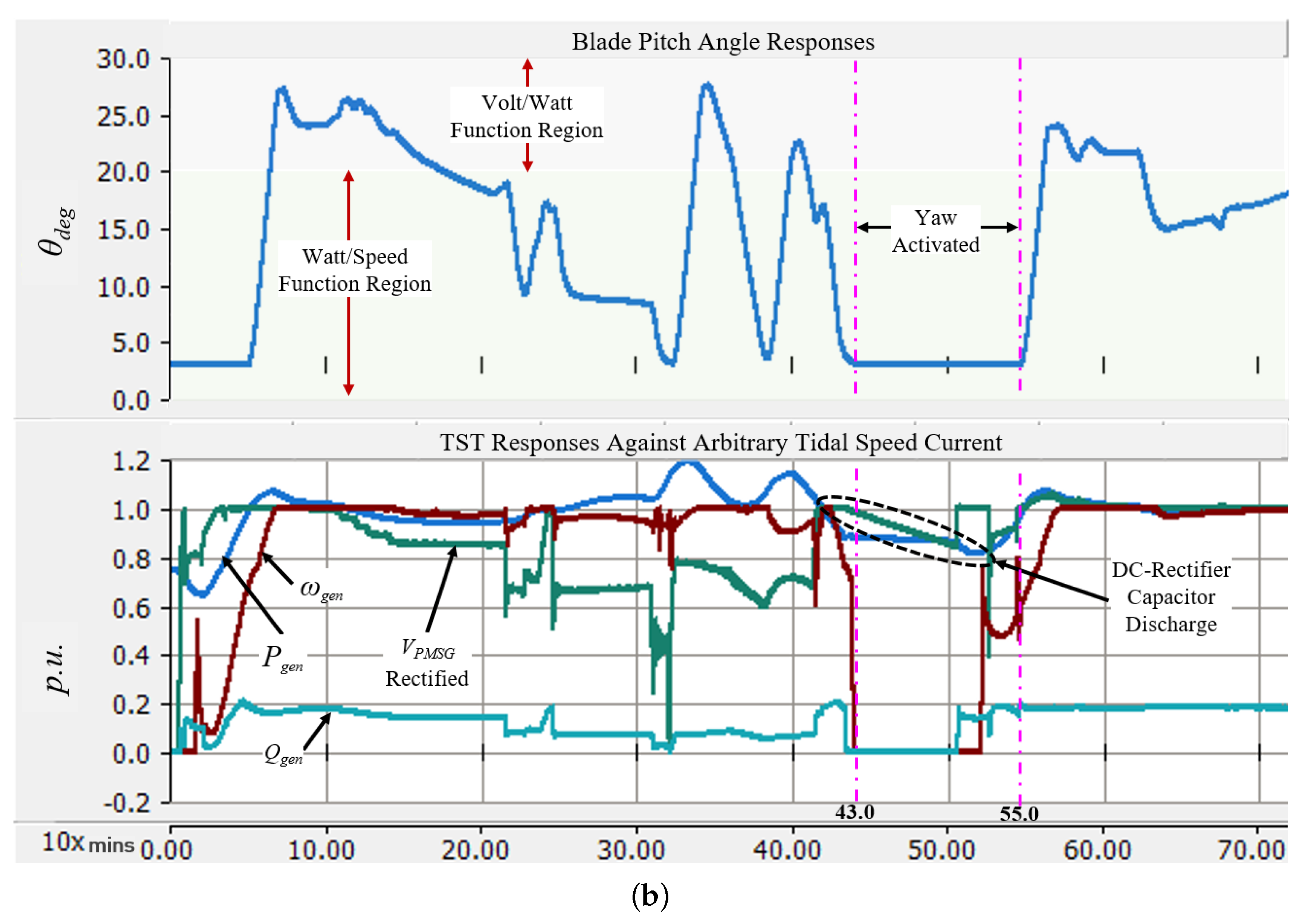
5.1.2. Torque-Controlled Blade Pitching and Yawing Administrations: Arbitrary Tidal Speed Profile
5.2. Tuning DCCA PI-Controller for Single Direct Drive TST under Arbitrary Tidal Speed Profile: Tidal Energy Conversion System Performances
5.3. DC Collection Point: Cascaded DCCAs Connecting to Bi-Pole HVDC Transmission
5.4. Voltage and Frequency Ride-through Performances during Momentary Fault Interruption
5.4.1. Tripping Two TSTs in a Cluster for All 10 DCCAs
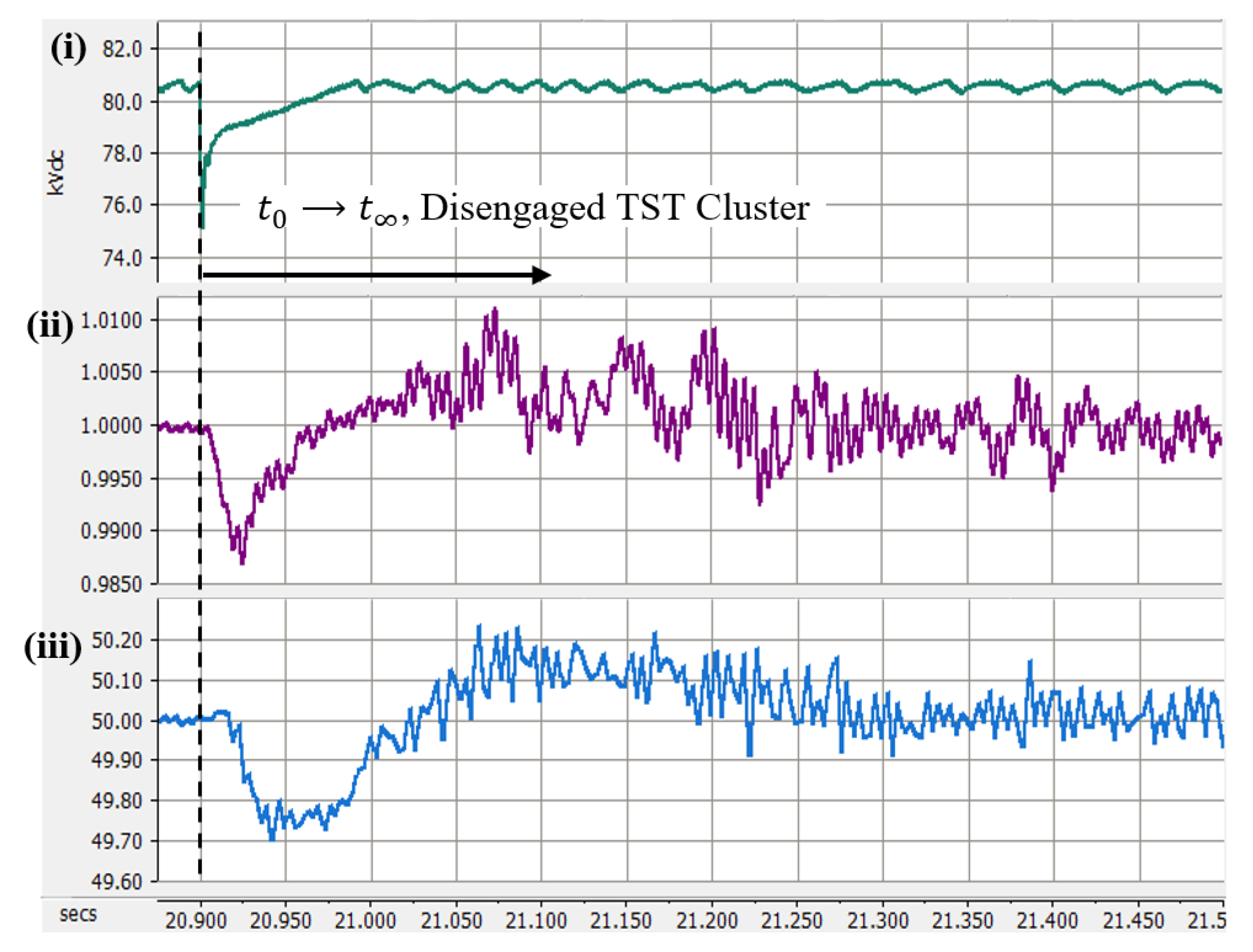
5.4.2. Tripping a Single TST Cluster from the DC Collection System
5.5. Summary of Proposed System Performances against Other DC Collection System Methodologies
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| TST | Tidal Stream Turbine |
| VSC | Voltage Source Converter |
| HVDC | High-Voltage Direct Current |
| DCCA | DC Collection Aggregator |
| ZSI | Impedance Source Inverter |
| OVC-Rect | Over-Voltage Control Diode Rectifier |
| PMSG | Permanent Magnet Synchronous Generator |
| Watt/Speed | Active Power-Mechanical Speed |
| Volt/Watt | Voltage-Active power |
| Freq/Watt | Frequency-Active power |
| H-XFMR | High Frequency Transformer |
| PWM | Pulse Width Modulation |
| MPPT | Maximum Power Point of Tracking |
Appendix A. Proof of Lemma for Basic Operations of ZSI


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Permanent-Magnet Synchronous Generator Specifications | |
|---|---|
| Generator type | Radial Flux |
| Rated MVA | 1.5 |
| Rated Voltage | 4.16 |
| Rated Frequency | 30 |
| No. of pole pairs | 145 |
| Angular Moment of Inertia | 1.5 s |
| Generator type | Radial Flux |
| Tidal Steam Turbine Physique Specifications | |
| Turbine type (3-blades) | Horizontal-axis |
| Machine nominal angular mech. speed | 1.466 |
| Rated turbine power | 1.5 |
| Blade Radius | 9 m |
| Turbine Height | 12 m |
| MPPT tidal current velocity region | 5.956–11.07 |
| Pitch Elevation | 0–30 |
| DED Converter Parameters, Smart Aggregator Inverter (SAI) | |
| Six-pulse Frequency Control Diode Rectifier | |
| Forward voltage drop, | 4.49–5.35 V |
| Maximum average output current, | 56.25 |
| Switching Freq. Chopper | 1650 |
| Impedance Source Inverter | |
| Output power, | 1.5 |
| Input Voltage, | 23.33–70 |
| Constant Boost Voltage, | 70 |
| Output voltage, | 51.41 |
| Output frequency | 10 |
| Current ripple z-network inductors | 60% |
| Voltage ripple z-network capacitors | 3% |
References
- O’Hara Murray, R.; Gallego, A. A modelling study of the tidal stream resource of the Pentland Firth, Scotland. Renew. Energy 2017, 102, 326–340. [Google Scholar] [CrossRef]
- Von Jouanne, A.; Brekken, T. Ocean and Geothermal Energy Systems. Proc. IEEE 2017, 105, 2147–2165. [Google Scholar] [CrossRef]
- Lang, C. Harnessing tidal energy takes new turn. IEEE Spectr. 2003, 40, 13. [Google Scholar] [CrossRef]
- Kitzing, L.; Mitchell, C.; Morthorst, P. Renewable energy policies in Europe: Converging or diverging? Energy Policy 2012, 51, 192–201. [Google Scholar] [CrossRef]
- Blunden, L.; Bahaj, A. Initial evaluation of tidal stream energy resources at Portland Bill, UK. Renew. Energy 2006, 31, 121–132. [Google Scholar] [CrossRef]
- Chen, H.; Tang, T.; Ait-Ahmed, N.; Benbouzid, M.; Machmoum, M.; Zaim, M. Attraction, Challenge and Current Status of Marine Current Energy. IEEE Access 2018, 6, 12665–12685. [Google Scholar] [CrossRef]
- Dai, Y.; Ren, Z.; Wang, K.; Li, W.; Li, Z.; Yan, W. Optimal Sizing and Arrangement of Tidal Current Farm. IEEE Trans. Sustain. Energy 2018, 9, 168–177. [Google Scholar] [CrossRef]
- Clarke, J.; Connor, G.; Grant, A.; Johnstone, C.; Sanchez, S.O. Analysis of a single point tensioned mooring system for station keeping of a contra-rotating marine current turbine. IET Renew. Power Gener. 2010, 4, 473. [Google Scholar] [CrossRef]
- Harrison, M.; Batten, W.; Myers, L.; Bahaj, A. Comparison between CFD simulations and experiments for predicting the far wake of horizontal axis tidal turbines. IET Renew. Power Gener. 2010, 4, 613. [Google Scholar] [CrossRef]
- Sukati, K.S.; Dorrell, D.G.; Agee, J. A Direct PI Controller without the Feedforward Terms for a VSC-based Permanent Magnet Synchronous Generator for a Wind Turbine. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 5255–5260. [Google Scholar]
- Naayagi, R.T.; Yee, W.L. Modelling, simulation and experimentation of grid tied inverter for wind energy conversion systems. In Proceedings of the 2017 International Conference on Green Energy and Applications (ICGEA), Singapore, 25–27 March 2017; pp. 52–56. [Google Scholar]
- Phei, L.C.; Naayagi, R.T. Matrix Converter for Grid Connected Wind Energy Conversion Systems. In Proceedings of the 2018 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Singapore, 22–25 May 2018; pp. 1005–1009. [Google Scholar]
- Harrabi, N.; Souissi, M.; Aitouche, A.; Chaabane, M. Intelligent control of grid-connected AC–DC–AC converters for a WECS based on T–S fuzzy interconnected systems modelling. IET Power Electron. 2018, 11, 1507–1518. [Google Scholar] [CrossRef]
- Zhu, J.; Hu, J.; Hung, W.; Wang, C.; Zhang, X.; Bu, S.; Li, Q.; Urdal, H.; Booth, C.D. Synthetic Inertia Control Strategy for Doubly Fed Induction Generator Wind Turbine Generators Using Lithium-Ion Supercapacitors. IEEE Trans. Energy Convers. 2018, 33, 773–783. [Google Scholar] [CrossRef]
- Marios, C.S.; Shek, J.; Mueller, M. Modelling, control and frequency domain analysis of a tidal current conversion system with onshore converters. IET Renew. Power Gener. 2016, 10, 158–165. [Google Scholar]
- Kant, K.; Jain, C.; Singh, B. A Hybrid Diesel-Wind PV-Based Energy Generation System with Brushless Generators. IEEE Trans. Ind. Inform. 2017, 13, 1714–1722. [Google Scholar] [CrossRef]
- Autkar, K.V.; Dhamse, S.S. Solid State Transformer for Doubly Fed Induction Generator Based Wind Energy Conversion System: A Review. In Proceedings of the 2018 International Conference on Computation of Power, Energy, Information and Communication (ICCPEIC), Chennai, India, 28–29 March 2018; pp. 129–134. [Google Scholar]
- Atlantis Resources AR1500 Tidal Turbine. 2016. Available online: https://www.atlantisresourcesltd.com/wp/wp-content/uploads/2016/08/AR1500-Brochure-Final-1.pdf (accessed on 20 December 2019).
- ABB XLPE Submarine Cable Systems Attachment to XLPE Land Cable Systems-User’s Guide. 2010. Available online: http://new.abb.com/docs/default-source/ewea-doc/xlpe-submarine-cable-systems-2gm5007.pdf (accessed on 20 December 2019).
- Benelghali, S.; Benbouzid, M.; Charpentier, J. Generator Systems for Marine Current Turbine Applications: A Comparative Study. IEEE J. Ocean. Eng. 2012, 37, 554–563. [Google Scholar] [CrossRef]
- Robins, P.E.; Neill, S.P.; Lewis, M.J.; Ward, S.L. Characterising the spatial and temporal variability of the tidal-stream energy resource over the northwest European shelf seas. Appl. Energy 2015, 147, 510–522. [Google Scholar] [CrossRef]
- Piano, M.; Neill, S.P.; Lewis, M.J.; Robins, P.E.; Hashemi, M.R.; Davies, A.G.; Ward, S.L.; Roberts, M.J. Tidal stream resource assessment uncertainty due to flow asymmetry and turbine yaw misalignment. Renew. Energy 2017, 114, 1363–1375. [Google Scholar] [CrossRef]
- Water, W.; Lu, J. Improved High-Frequency Planar Transformer for Line Level Control (LLC) Resonant Converters. IEEE Mag. Lett. 2013, 4, 1–4. [Google Scholar] [CrossRef]
- Barrios, E.; Ursua, A.; Marroyo, L.; Sanchis, P. Analytical Design Methodology for Litz-Wired High-Frequency Power Transformers. IEEE Trans. Ind. Electron. 2015, 62, 2103–2113. [Google Scholar] [CrossRef]
- Liu, C.; Qi, L.; Cui, X.; Shen, Z.; Wei, X. Wideband Mechanism Model and Parameter Extracting for High-Power High-Voltage High-Frequency Transformers. IEEE Trans. Power Electron. 2016, 31, 3444–3455. [Google Scholar] [CrossRef]
- Leibl, M.; Ortiz, G.; Kolar, J. Design and Experimental Analysis of a Medium-Frequency Transformer for Solid-State Transformer Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 110–123. [Google Scholar] [CrossRef]
- Zhao, S.; Li, Q.; Lee, F.; Li, B. High-Frequency Transformer Design for Modular Power Conversion From Medium-Voltage AC to 400 VDC. IEEE Trans. Power Electron. 2018, 33, 7545–7557. [Google Scholar] [CrossRef]
- Xiang, X.; Merlin, M.M.C.; Green, T.C. Cost analysis and comparison of HVAC, LFAC and HVDC for offshore wind power connection. In Proceedings of the 12th IET International Conference on AC and DC Power Transmission (ACDC 2016), Beijing, China, 28–29 May 2016; pp. 1–6. [Google Scholar]
- Liang, J.; Jing, T.; Gomis-Bellmunt, O.; Ekanayake, J.; Jenkins, N. Operation and Control of Multiterminal HVDC Transmission for Offshore Wind Farms. IEEE Trans. Power Deliv. 2011, 26, 2596–2604. [Google Scholar] [CrossRef]
- Raza, A.; Dianguo, X.; Yuchao, L.; Xunwen, S.; Williams, B.; Cecati, C. Coordinated Operation and Control of VSC Based Multiterminal High Voltage DC Transmission Systems. IEEE Trans. Sustain. Energy 2016, 7, 364–373. [Google Scholar] [CrossRef]
- Vennell, R. Exceeding the Betz limit with tidal turbines. Renew. Energy 2013, 55, 277–285. [Google Scholar] [CrossRef]
- Lamy, J.; Azevedo, I. Do tidal stream energy projects offer more value than offshore wind farms? A case study in the United Kingdom. Energy Policy 2018, 113, 28–40. [Google Scholar] [CrossRef]
- Canadian Tide and Current Tables. 2019. Available online: http://www.charts.gc.ca/publications/tables-eng.asp (accessed on 19 January 2019).
- Mahda, J.J.; Maswood, A.; Tseng, K. Design and Evaluation of a New Converter Control Strategy for Near-Shore Tidal Turbines. IEEE Trans. Ind. Electron. 2013, 60, 5648–5659. [Google Scholar]
- Shi, G.; Zhang, J.; Yao, L.; Cai, X.; Zhu, M. Improved variable speed control of series-connected DC wind turbines for offshore wind power collection to high-voltage direct current system. IET Renew. Power Gener. 2016, 10, 843–851. [Google Scholar] [CrossRef]

















| Ref. Year | Magnetic: Material | Core Series | @ 100 C | Power Rating | V/V | Freq. |
|---|---|---|---|---|---|---|
| [23] 2013 | Finemet: FT-3H | UU, EE | 0.13T | 2 kVA-250 kVA | 380 V/5 kV | 20 kHz |
| [24] 2015 | Ferrite: N87 | EE | 0.118T | 5 kW | 215 V/344 V | 50 kHz |
| [25] 2016 | NanoCrys.: FT-3M | UU | 0.8 T | 30 kVA | 0.7 kV/64 kV | 20 kHz |
| [26] 2017 | Metglas: 2605SA1 | CC | 0.55 T | 166 kW | 400 V/1 kV | 20 kHz |
| [27] 2018 | Ferrite: 3F36 | EE | 0.118 T | 15 kW | 0.4 kV/4.16 kV | 0.5 MHz |
| (a) | ||||
| Tidal Speed | 2.8 kn | 3.51 kn | 5.78 kn | 7.86 kn |
| DCCA configured with 2 Aggregated TSTs | ||||
| Efficiency (%) | 89.08 | 91.48 | 94.78 | 95.49 |
| PMSG Speed (p.u.) | 0.388 | 0.794 | 1.002 | 0.996 |
| DCCA configured with 6 Aggregated TSTs | ||||
| Efficiency (%) | 92.26 | 92.84 | 93.21 | 93.53 |
| PMSG Speed (p.u.) | 0.531 | 0.711 | 0.852 | 0.941 |
| DCCA configured with 8 Aggregated TSTs | ||||
| Efficiency (%) | 91.36 | 91.43 | 91.75 | 91.14 |
| PMSG Speed (p.u.) | 0.521 | 0.592 | 0.716 | 0.893 |
| (b) | ||||
| Large Scale Deployment | MCT | Proposed | ||
| SeaGen [32] | TST | |||
| Power converter system (Freq. conv.) | 894 $/kW | 798 $/kW | ||
| Onshore power grid interconnections | 50 $/kW | 119 $/kW | ||
| Control system per TST | 13 $/kW | 9.5 $/kW | ||
| Annual Operation and Management Cost | 99 $/kW | 87 $/kW | ||
| Total savings | − | 42.5 $/kW | ||
| Cost of energy (cents/kWh) | 4–6.5 | 3.56–5.2 | ||
| Tidal Speed | 3.50 kn | 4.76 kn | 5.89 kn | 8.15 kn |
|---|---|---|---|---|
| V, | 0.408 | 0.875 | 0.989 | 0.992 |
| I, | 150.61 | 372.80 | 364.83 | 363.242 |
| P, | 0.302 | 1.357 | 1.501 | 1.499 |
| Q, | 0.0625 | 0.55 | 0.55 | 0.55 |
| , | 0.411 | 0.869 | 0.956 | 0.963 |
| , | 0.482 | 0.914 | 1.007 | 0.998 |
| 0.496 | 0.338 | 0.164 | 0.072 | |
| Pitch angle,deg | 5.96 | 9.42 | 17.53 | 18.82 |
| (a) | ||||
| P-Gain | I-Gain | P–I Response | Settling | Standard |
| Time | Deviation | |||
| Low: | Low: | Oversht: 10.4% | 16.3 s | 0.2728 |
| 0.01–0.15 | 0.01–0.15 | Overdamped | Eff. 71.43% | |
| Low: | High: | Oversht: 18.7% | nil | 3.4965 |
| 0.01–0.15 | 1.50–3.89 | Diverged | Eff. 11.47% | |
| High: | Low: | Oversht: 29.1% | nil | 8.7423 |
| 1.50–3.89 | 0.01–0.15 | Diverged | Eff. 5.44% | |
| High: | High: | Oversht: 1.85% | 9.56 s | 0.121 |
| 1.50–3.89 | 1.50–3.89 | underdamped | Eff. 89.45% | |
| (b) | ||||
| Tidal Speed | 3.50 kn | 4.76 kn | 5.89 kn | 8.15 kn |
| S.T. width: | 93.666 s | 55.666 s | 49.333 s | 49.233 s |
| ; | 0.38–0.42; 1.2–2.1 | 0.67–1.85; 1.98–2.76 | 0.20–1.00; 2.02–2.31 | 0.15–2.50; 1.5–3.0 |
| Z-network: | : 24.06 kV | : 41.553 kV | : 48.218 kV | : 48.583 kV |
| = = 0.0462 H | : 67.68 kV | : 69.49 kV | : 71.59 kV | : 71.80 kV |
| = = 6.039 F | : 50.116 kV | : 51.459 kV | : 53.013 kV | : 53.265 kV |
| = 10 kHz | : 0.264 MW | : 1.283 MW | : 1.374 MW | : 1.380 MW |
| = 30 kHz | : 2.81 | : 1.67 | : 1.48 | : 1.47 |
| Settling: 15.7 s | Settling: 10.2 s | Settling: 10.6 s | Settling: 11.7 s | |
| P–I Response | Overshoot (%): 0% | Overshoot (%): 3.545% | Overshoot (%): 7.067% | Overshoot (%): 10.389% |
| Rise (10–90%): 10.45 s | Rise (10–90%): 10.45 s | Rise (10–90%): 10.45 s | Rise (10–90%): 10.45 s | |
| (c) | ||||
| Control Method | Proposed | Marios [15] | Mahda [34] | |
| Switching Freq., (Hz) | 20 k | 7 k for optimum | 60 | |
| Power ripple, (%) | >0.34%- | >0.28%- | <1% | |
| <0.69% | <0.65% | |||
| Voltage THD, (%) | 1.89% | 2.53% | 3.72% | |
| Controller Behaviour | Adaptive | Freq. Dependant | Fixed | |
| PCC Busbar Freq. | 0.083% | Not mentioned | 0.072% | |
| Deviation, (%) | ||||
| Fault-ride through | 120 ms | Not Tested | 230 ms | |
| Converter Eff. (%) | 93.56- | 89.67- | 97.78- | |
| 98.73% | 96% | 99.3% | ||
| (a) | |||||
| Tidal Channel 1 (Front Row) | Tidal Channel 2 (Middle Row) | Tidal Channel 3 (Last Row) | |||
| Turbulence Scale: 50 m | Turbulence Scale: 100 m | Turbulence Scale: 150 | |||
| Surface Drag Coeff.: 0.192 kn | Surface Drag Coeff.: 0.130 kn | Surface Drag Coeff.: 0.035 kn | |||
| Gust Peak Velocity: 0.15 kn | Gust Peak Velocity: 0.09 kn | Gust Peak Velocity: 0.04 kn | |||
| TST 1 [Std Dev. 0.162] | TST 2 [Std Dev. 0.187] | TST 3 [Std Dev. 0.136] | TST 4 [Std Dev. 0.175] | TST 5 [Std Dev. 0.121] | TST 6 [Std Dev. 0.187] |
| Tidal Noise 0.02 rad/s | Tidal Noise 0.16 rad/s | Tidal Noise 0.12 rad/s | Tidal Noise 0.24 rad/s | Tidal Noise 0.26 rad/s | Tidal Noise 0.3 rad/s |
| Generating Unit, PMSG | |||||
| V 0.938 p.u. | V 0.925 p.u. | V 0.803 p.u. | V 0.793 p.u. | V 0.634 p.u. | V 0.622 p.u. |
| 11.925 rpm | 11.789 rpm | 10.245 rpm | 10.233 rpm | 8.950 rpm | 8.897 rpm |
| I 1.335 kArms | I 1.313 kArms | I 1.308 kArms | I 1.311 kArms | I 1.293 kArms | I 1.290 kArms |
| 0.996 p.u. | 0.991 p.u. | 0.865 p.u. | 0.848 p.u. | 0.778 p.u. | 0.733 p.u. |
| ZSI | |||||
| V 45.05–45.75 kVDC | V 43.03–43.87 kVDC | V 37.95–38.65 kVDC | V 35.88–36.41 kVDC | V 31.64–32.42 kVDC | V 31.48–32.16 kVDC |
| BF 1.52 | BF 1.59 | BF 1.84 | BF 1.90 | BF 2.18 | BF 2.25 |
| T 50.66 s | T 53.00 s | T 61.33 s | T 63.33 s | T 72.66 s | T 75.00 s |
| Vac 51.37 kVAC | Vac 51.38 kVAC | Vac 51.38 kVAC | Vac 51.39 kVAC | Vac 51.36 kVAC | Vac 51.37 kVAC |
| THD 1.246% | THD 1.123% | THD 1.346% | THD 1.245% | THD 1.269% | THD 1.279% |
| P 1.485–1.492 MW | P 1.452–1.464 MW | P 1.329–1.372 MW | P 1.301–1.322 MW | P 1.180–1.207 MW | P 1.132–1.111 MW |
| (b) | |||||
| HVDC-Link | Voltage, (p.u.) | Active Power | T.H.D | Frequency | |
| (kVDC) | (Base: 22 kVAC) | (MW) | (%) | (Hz) | |
| ±79.92- | 0.992- | 81.5- | 0.121 | 49.96- | |
| ±80.13 | 1.002 | 87.88 | 50.01 | ||
| Sending-End Region | |||
|---|---|---|---|
| Voltage | Frequency | Time taken | Voltage dip |
| TST AC-Link | TST AC-Link | system recover | sag by 15% |
| 0.75–1.01 p.u. | 19.89–20.2 kHz | 0.62 ms | for 0.5 cycle |
| Receiving-End Region | |||
| HVDC-Link | Voltage | T.H.D | Active Power |
| PCC Busbar | PCC Busbar | ||
| 158.8–160 | 0.99–1.01 p.u. | 1.28–1.535% | 54.67 MW |
| Methods | Proposed | Liang [29] | Raza [30] | Shi [35] |
|---|---|---|---|---|
| Generator-side Transmission | ||||
| ECS Efficiency, | 92.23–98.34 | 89.44–97.67 | 94.81–98.94 | 85.46–94.53 |
| Voltage Ripple, | 1.77–1.98 | 1.34–1.79 | 1.67–1.92 | 1.77–2.15 |
| Frequency Std. Deviation | 0.116–0.124 | 0.149–0.162 | 0.167–0.173 | 0.136–0.152 |
| Generator Start-up | 8.18 s transient | 6.8 s transient | Not | 14 s transient |
| to steady-state | to steady-state | Mentioned | to steady-state | |
| Receiving-side Transmission (PCC Busbar) | ||||
| Frequency Std. Deviation | 0.12–0.125 | 0.116–0.121 | 0.127–0.134 | 0.121–0.142 |
| Voltage signal-to-noise ratio, | 97.67 dB | 98.12 dB | 97.81 dB | 97.13 dB |
| Power losses, ≈ | DC Line 200 km | DC Line 100 km | DC Line 100 km | Disregard Transm |
| 10.3–14.12 | 7–11 | 15 | Line Analyses | |
| Power T.H.D, (%) | 0.23 | 0.143 | 0.321 | 0.276 |
| Fault-ride through abled | YES | YES | YES | Not Analysed |
| Voltage dip at Turbine, (%) | 10.43–12.45 | Not Analysed | 20.8–24.6 | Not Analysed |
| Time taken system recovery, (ms) | 50–70 | Not Analysed | 70–100 | Not Analysed |
| ECS Converter | Rec-ZSI | VSC | VSC | VSC |
| Controller Approach | PI Adaptive Controller | PI Droop Controller | P Droop Controller | P–I Controller |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bin Mohamad Saifuddin, M.R.; Ramasamy, T.N.; Qi Tong, W.P. Design and Control of a DC Collection System for Modular-Based Direct Electromechanical Drive Turbines in High Voltage Direct Current Transmission. Electronics 2020, 9, 493. https://doi.org/10.3390/electronics9030493
Bin Mohamad Saifuddin MR, Ramasamy TN, Qi Tong WP. Design and Control of a DC Collection System for Modular-Based Direct Electromechanical Drive Turbines in High Voltage Direct Current Transmission. Electronics. 2020; 9(3):493. https://doi.org/10.3390/electronics9030493
Chicago/Turabian StyleBin Mohamad Saifuddin, Muhammad Ramadan, Thaiyal Naayagi Ramasamy, and Wesley Poh Qi Tong. 2020. "Design and Control of a DC Collection System for Modular-Based Direct Electromechanical Drive Turbines in High Voltage Direct Current Transmission" Electronics 9, no. 3: 493. https://doi.org/10.3390/electronics9030493
APA StyleBin Mohamad Saifuddin, M. R., Ramasamy, T. N., & Qi Tong, W. P. (2020). Design and Control of a DC Collection System for Modular-Based Direct Electromechanical Drive Turbines in High Voltage Direct Current Transmission. Electronics, 9(3), 493. https://doi.org/10.3390/electronics9030493