FPGA-Based Doppler Frequency Estimator for Real-Time Velocimetry



Abstract
1. Introduction
2. Background and State-of-the-Art
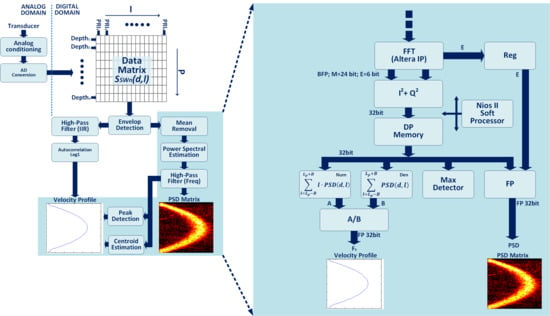
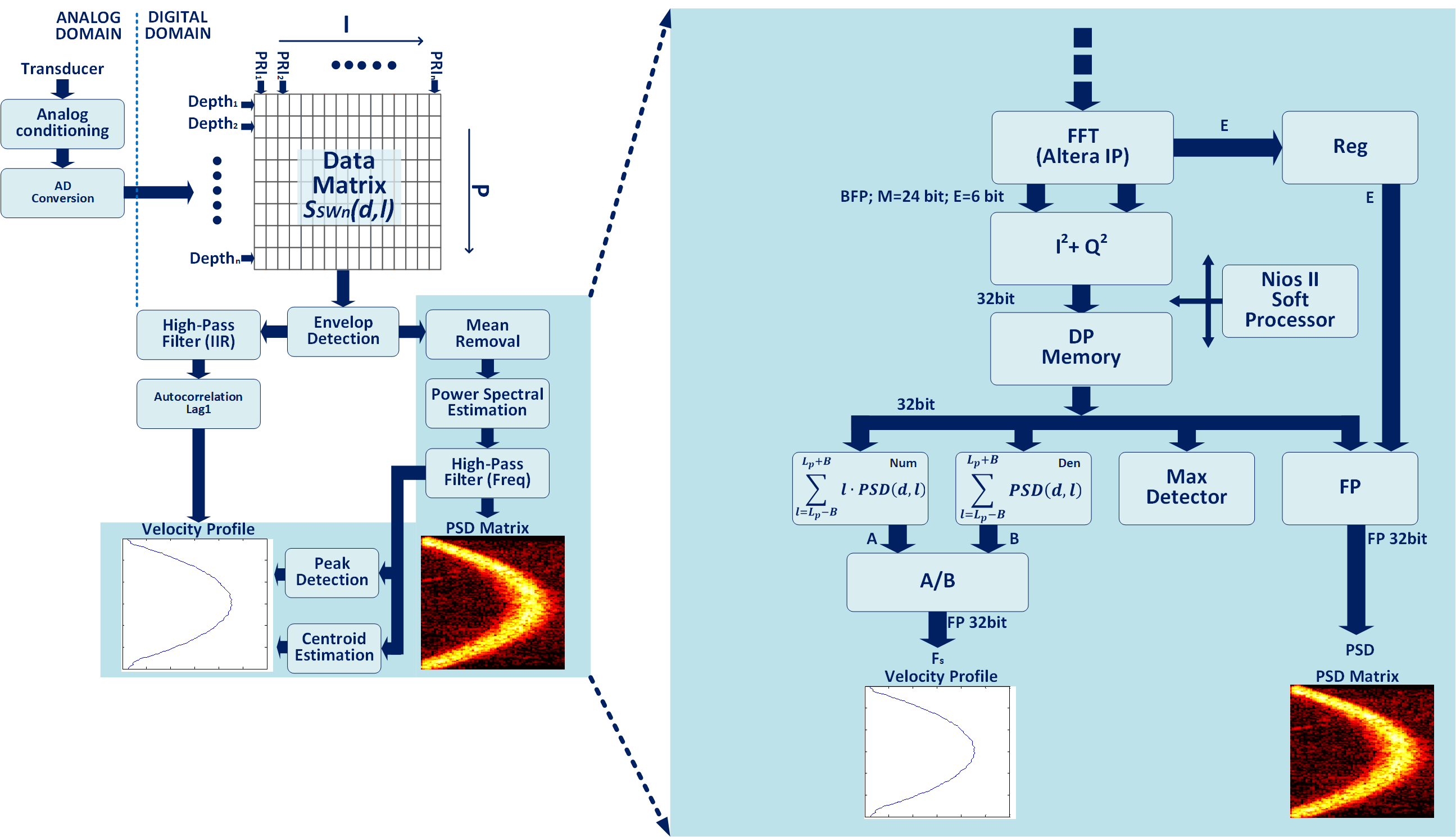
2.1. Doppler Processing Data Path Overview
2.2. Power Spectral Estimation
2.3. Spectral Peak
2.4. Centroid Frequency Estimation
3. The Proposed Method
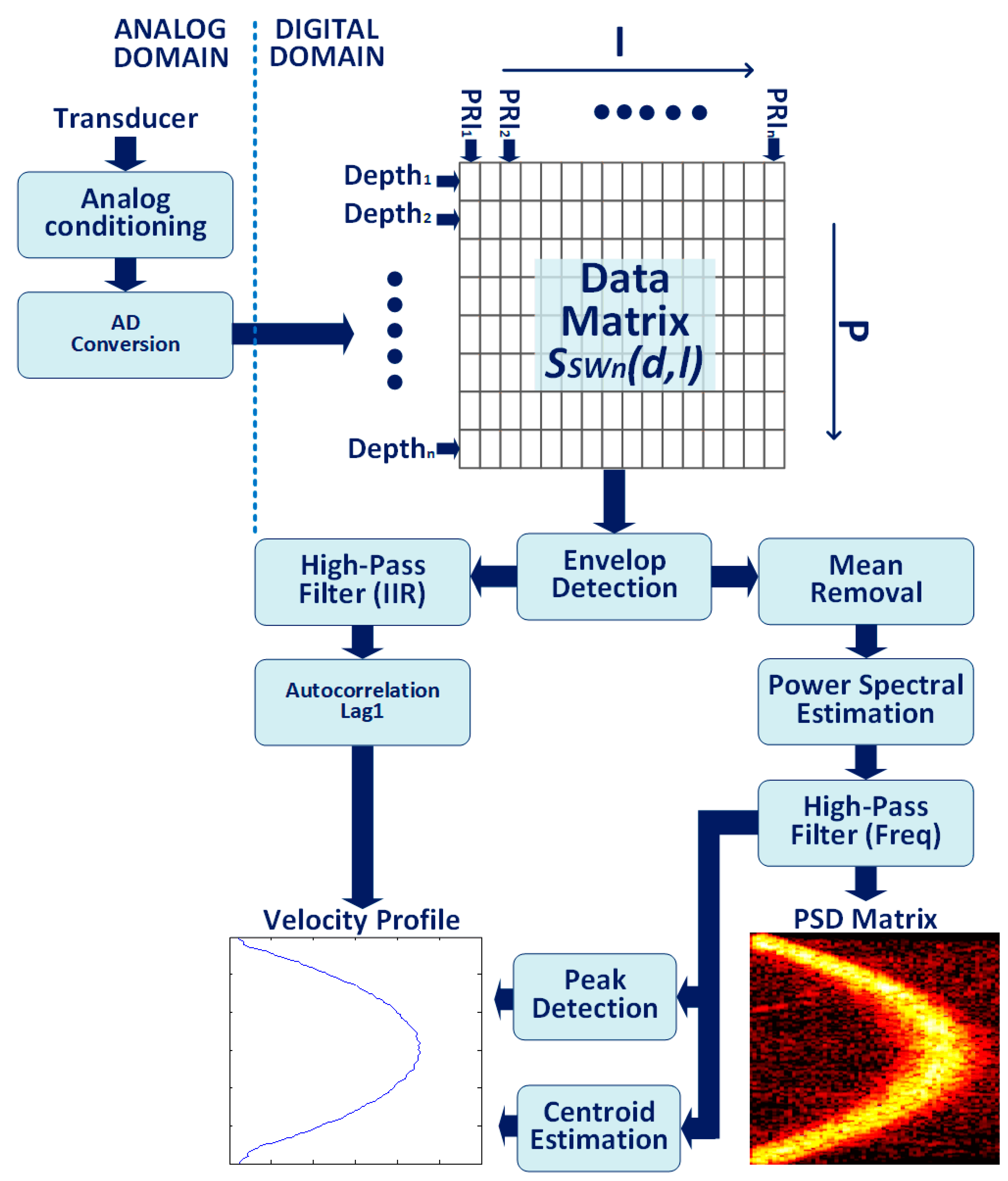
3.1. Method Basics
- (a)
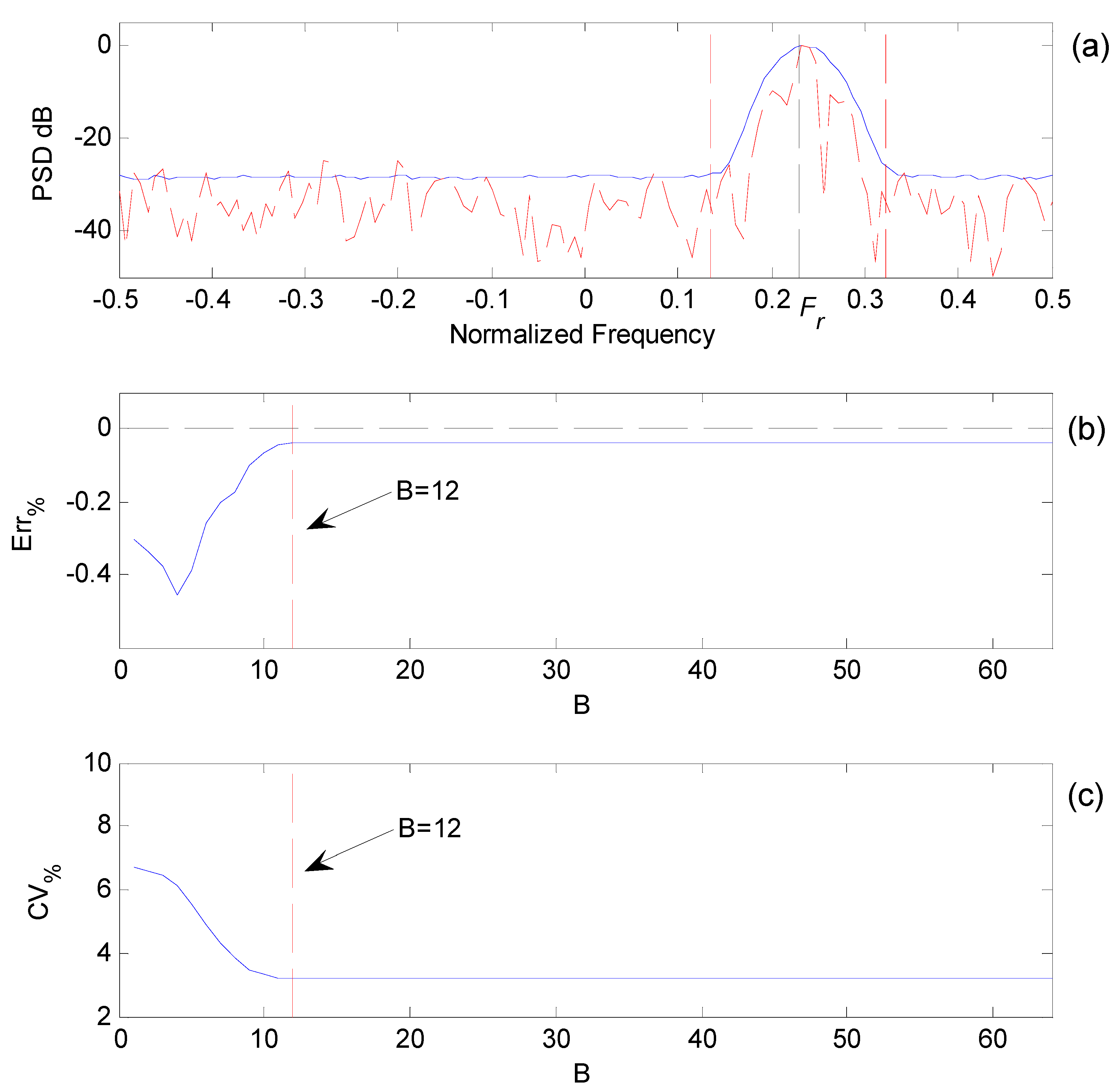
- The peak estimator (6) is first applied to obtain ;
- (b)
- The frequency interval [], centered on and of extension 2B + 1 is considered. More details on B are given below.
- (c)
- The centroid frequency , output of the estimator, is estimated in the region located in previous step.
3.2. The B Parameter
3.3. Comparison of Proposed Method to Standard Methods
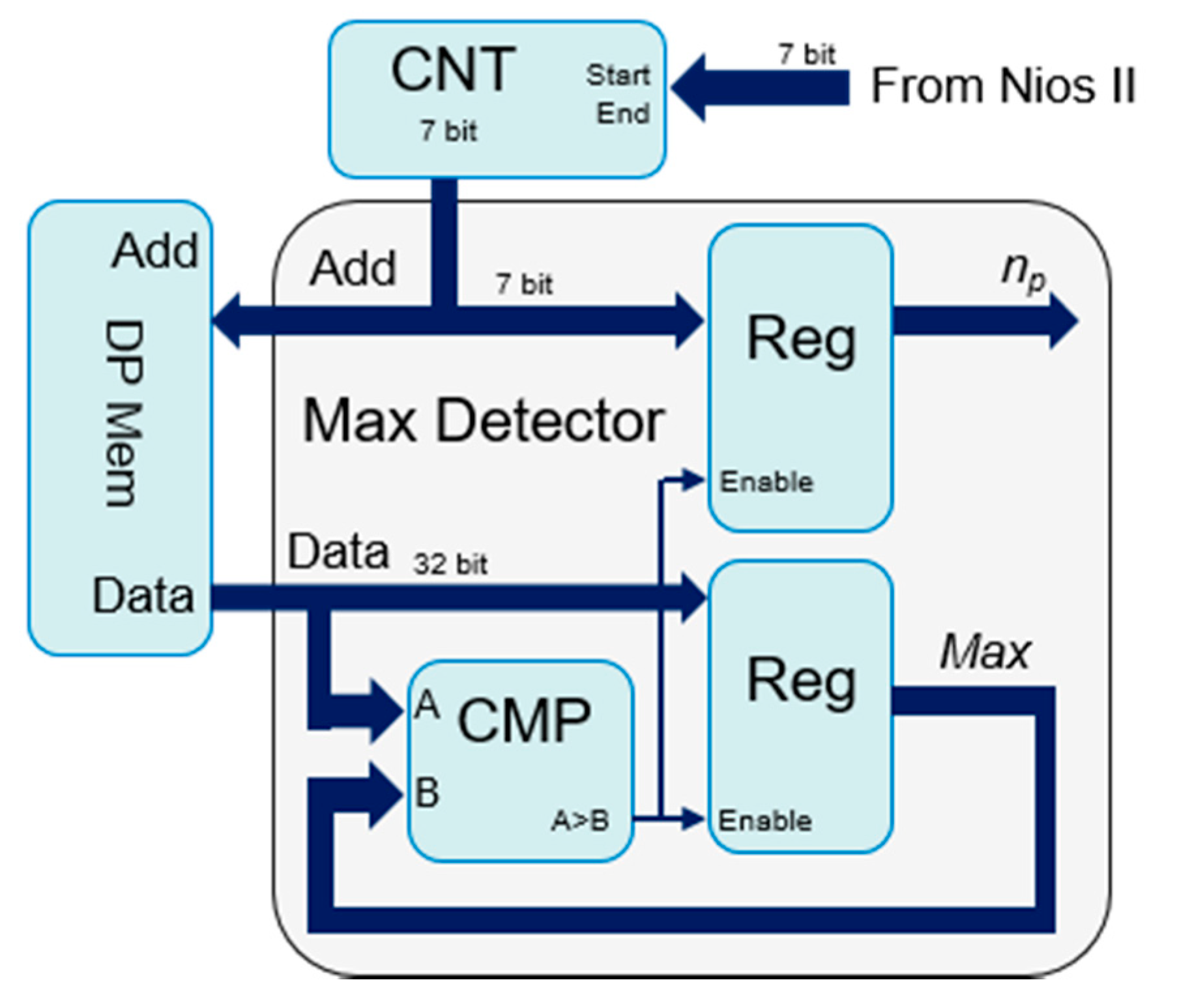
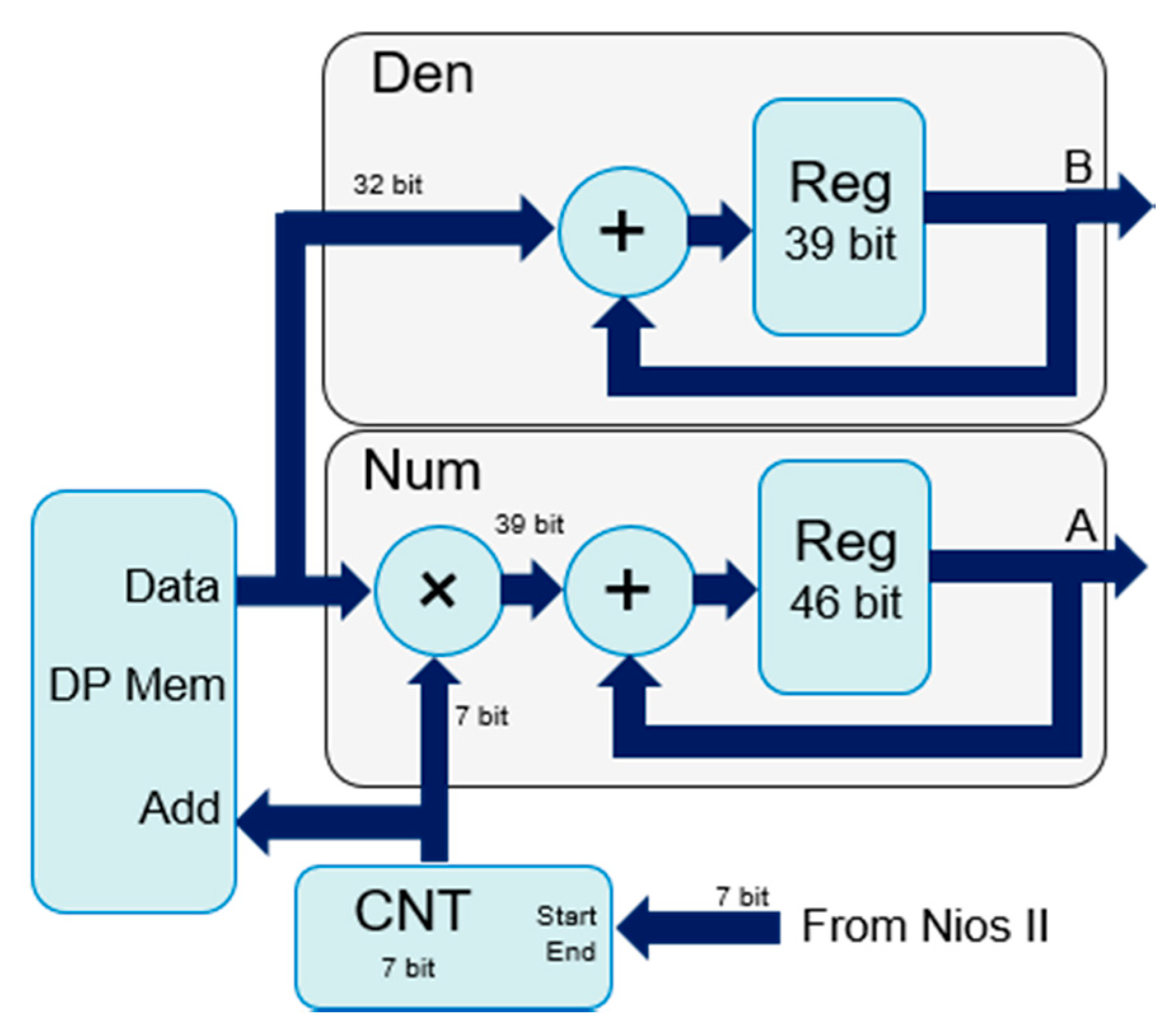
4. Circuit Architecture
- When data is processed according to Peak estimator, the Nios II activates the Max Detector only to get . When data is processed through full centroid estimator (7), the Nios II runs Num and Den modules on the whole PSD frequency range, followed by the A/B module.
5. Experiments and Results
5.1. Modules Latency
5.2. FPGA Resources and Maximum Clock Frequency
5.3. Data Throughput
5.4. Mathematical Noise
6. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dong, X.; Tan, C.; Dong, F. Gas-liquid two-phase flow velocity measurement with continuous wave ultrasonic doppler and conductance sensor. IEEE Trans. Instrum. Meas. 2017, 66, 3064–3076. [Google Scholar] [CrossRef]
- Kotzé, R.; Ricci, S.; Birkhofer, B.; Wiklund, J. Performance tests of a new non-invasive sensor unit and ultrasound electronics. Flow Meas. Instrum. 2015, 48, 104–111. [Google Scholar] [CrossRef]
- Evans, D.H.; McDicken, W.N. Doppler Ultrasound Physics, Instrumentation and Signal Processing; Wiley: Chichester, UK, 2000. [Google Scholar]
- Wiklund, J.; Stading, M. Application of in-line ultrasound Doppler-based UVP–PD rheometry method to concentrated model and industrial suspensions. Flow Meas. Instrum. 2008, 19, 171–179. [Google Scholar] [CrossRef]
- Newhouse, V.L.; Varner, L.W.; Bendick, P.J. Geometrical spectrum broadening in ultrasonic Doppler systems. IEEE Trans. Biomed. Eng. 1977, 24, 478–480. [Google Scholar] [CrossRef] [PubMed]
- Newhouse, V.L.; Bendickand, P.J.; Varner, L.W. Analysis of transit time effects on Doppler flow measurement. IEEE Trans. Biomed. Eng. 1976, BME-23, 381–387. [Google Scholar] [CrossRef] [PubMed]
- Tortoli, P.; Guidi, G.; Newhouse, V.L. Improved blood velocity estimation using the maximum Doppler frequency. Ultrasound Med. Biol. 1995, 21, 527–532. [Google Scholar] [CrossRef]
- Kathpalia, A.; Karabiyik, Y.; Eik-Nes, S.H.; Tegnander, E.; Ekroll, I.K.; Kiss, G.; Torp, H. Adaptive spectral envelope estimation for Doppler ultrasound. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 1825–1838. [Google Scholar] [CrossRef]
- Ricci, S.; Vilkomerson, D.; Matera, R.; Tortoli, P. Accurate blood peak velocity estimation using spectral models and vector Doppler. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 686–696. [Google Scholar] [CrossRef]
- Ricci, S.; Meacci, V.; Birkhofer, B.; Wiklund, J. FPGA-based System for In-Line Measurement of Velocity Profiles of Fluids in Industrial Pipe Flow. IEEE Trans. Ind. Electron. 2017, 64, 3997–4005. [Google Scholar] [CrossRef]
- Jensen, J.A. Estimation of Blood Velocities Using Ultrasound; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Ricci, S. Switching power suppliers noise reduction in ultrasound Doppler fluid measurements. Electronics 2019, 8, 421. [Google Scholar] [CrossRef]
- Ricci, S.; Bassi, L.; Boni, E.; Dallai, A.; Tortoli, P. Multichannel FPGA-based arbitrary waveform generator for medical ultrasound. Electron. Lett. 2007, 43, 1335–1336. [Google Scholar] [CrossRef]
- Giannelli, P.; Bulletti, A.; Granato, M.; Frattini, G.; Calabrese, G.; Capineri, L. A Five-Level, 1–MHz, Class-D Ultrasonic driver for guided-wave transducer arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 66, 1616–1624. [Google Scholar] [CrossRef] [PubMed]
- Gran, F.; Jakobsson, A.; Jensen, J.A. Adaptive spectral Doppler estimation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 700–714. [Google Scholar] [CrossRef] [PubMed]
- Ricci, S.; Meacci, V. Data-adaptive coherent demodulator for high dynamics pulse-wave ultrasound applications. Electronics 2018, 7, 434. [Google Scholar] [CrossRef]
- Bjaerum, S.; Torp, H.; Kristoffersen, K. Clutter filter design for ultrasound color flow imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 204–216. [Google Scholar] [CrossRef] [PubMed]
- Tortoli, P.; Guidi, F.; Guidi, G.; Atzeni, C. Spectral velocity profiles for detailed ultrasound flow analysis. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1996, 43, 654–659. [Google Scholar] [CrossRef]
- Cooley, J.W.; Tukey, J.W. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Ricci, S. Adaptive spectral estimators for fast flow profile detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2013, 60, 421–427. [Google Scholar] [CrossRef]
- Tronci, S.; Van Neer, P.; Giling, E.; Stelwagen, U.; Piras, D.; Mei, R.; Corominas, F.; Grosso, M. In-line monitoring and control of rheological properties through data-driven ultrasound soft-sensors. Sensors 2019, 19, 5009. [Google Scholar] [CrossRef]
- Karabiyik, Y.; Ekroll, I.K.; Eik-Nes, S.H.; Avdal, J.; Løvstakken, L. Adaptive spectral estimation methods in color flow imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 1839–1851. [Google Scholar] [CrossRef]
- Jensen, J.A.; Svendsen, N.B. Calculation of pressure fields from arbitrarily shaped, apodized, and excited ultrasound transducers. IEEE Trans. Ultrason. Ferroelect. Freq. Control. 1992, 39, 262–267. [Google Scholar] [CrossRef] [PubMed]
- Jensen, J.A. Field: A program for simulating ultrasound systems. Med. Biol. Eng. Comp. 1996, 34, 351–353. [Google Scholar]
- Wagner, R.F.; Smith, S.W.; Sandrik, J.M.; Lopez, H. Statistics of speckle in ultrasound B-scans. IEEE Trans. Sonics Ultrason. 1983, SU-30, 156–163. [Google Scholar] [CrossRef]
- Altera-Intel, FFT IP Core User Guide. Available online: https://www.intel.com/content/dam/www/programmable/us/en/pdfs/literature/ug/ug_fft.pdf (accessed on 7 March 2020).
- Ramnarine, K.V.; Nassiri, D.K.; Hoskins, P.R.; Lubbers, J. Validation of a new blood-mimicking fluid for use in Doppler flow test objects. Ultrasound Med. Biol. 1998, 24, 451–459. [Google Scholar] [CrossRef]
- Ricci, S.; Diciotti, S.; Francalanci, L.; Tortoli, P. Accuracy and reproducibility of a novel dual-beam vector doppler method. Ultrasound Med. Biol. 2009, 35, 829–838. [Google Scholar] [CrossRef]
- Lui, E.Y.L.; Steinman, A.H.; Cobbold, R.S.C.; Johnston, K.W. Human factors as a source of error in peak Doppler velocity measurement. J. Vasc. Surg. 2005, 42, 972–979. [Google Scholar] [CrossRef]
- Ricci, S.; Ramalli, A.; Bassi, L.; Boni, E.; Tortoli, P. Real-time blood velocity vector measurement over a 2-D. Region, IEEE Trans. Ultrason. Ferroelect. Freq. Control. 2018, 65, 201–209. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | Peak Estimator | Full Centroid Estimator | Proposed | |||
|---|---|---|---|---|---|---|
| −20 dB | −8.74% | 51.1% | −68.3% | 63.3% | −8.8% | 50.7% |
| −15 dB | −0.38% | 7.3% | −29.67% | 31.9% | −0.11% | 4.4% |
| −10 dB | −0.21% | 6.9% | −2.38% | 6.7% | −0.15% | 3.2% |
| 0 dB | −0.13% | 6.8% | −0.04% | 3.2% | −0.06% | 3.2% |
| 10 dB | −0.17% | 6.8% | −0.04% | 3.2% | −0.04% | 3.2% |
| 20 dB | −0.13% | 6.7% | −0.04% | 3.2% | −0.04% | 3.2% |
| Operations | Weight | Peak Estimator L = 128 | Full Centroid Estimator L = 128 | Proposed Estimator L = 128 B = 12 | |||
|---|---|---|---|---|---|---|---|
| Comparisons | 1 | L−1 | 127 | - | - | L−1 | 127 |
| Additions | 1 | - | - | 2(L−1) | 254 | 4B | 48 |
| Multiplications | 2 | - | - | L−1 | 127 | 2B | 24 |
| Divisions | 16 | - | - | 1 | 1 | 1 | 1 |
| Total Effort | 127 | 524 | 239 | ||||
| PSD Calculation (L = 128) | ||||
| Block | Parameter | Latency (Clock Cycles) | ||
| FFT | TFFT | 294 | ||
| I2+Q2 | TIQ | 135 | ||
| FP | TFP | 135 | ||
| Doppler Frequency Calculation | ||||
| Block | Parameter | Peak Estimator L = 128 | Full Centroid Estimator L = 128 | Proposed est. L = 128; B = 12 |
| Max Det. | TM | 130 | Not used | 130 |
| Num | TND | Not used | 131 | 29 |
| Den | TND | Not used | 131 | 29 |
| A/B | TD | Not used | 16 | 16 |
| Block | LEs | DSPs | Memory Bits | Max Clock Freq. |
|---|---|---|---|---|
| FFT | 10,308 | 24 | 40,900 | 105 MHz |
| I2 + Q2 | 400 | 14 | 0 | 110 MHz |
| DP Mem | 0 | 0 | 4096 | 210 MHz |
| Max Det. | 70 | 0 | 0 | 150 MHz |
| Num | 600 | 0 | 0 | 120 MHz |
| Den | 600 | 0 | 0 | 120 MHz |
| A/B | 230 | 0 | 0 | 110 MHz |
| FP | 300 | 0 | 0 | 120 MHz |
| Estimator | T (Clock Cycles) | Throughput Estimates/s |
|---|---|---|
| Proposed B = 12 | 429 | 232 k |
| Full centroid | 531 | 189 k |
| Peak estimator | 429 | 232 k |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ricci, S.; Meacci, V. FPGA-Based Doppler Frequency Estimator for Real-Time Velocimetry. Electronics 2020, 9, 456. https://doi.org/10.3390/electronics9030456
Ricci S, Meacci V. FPGA-Based Doppler Frequency Estimator for Real-Time Velocimetry. Electronics. 2020; 9(3):456. https://doi.org/10.3390/electronics9030456
Chicago/Turabian StyleRicci, Stefano, and Valentino Meacci. 2020. "FPGA-Based Doppler Frequency Estimator for Real-Time Velocimetry" Electronics 9, no. 3: 456. https://doi.org/10.3390/electronics9030456
APA StyleRicci, S., & Meacci, V. (2020). FPGA-Based Doppler Frequency Estimator for Real-Time Velocimetry. Electronics, 9(3), 456. https://doi.org/10.3390/electronics9030456