Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems



Abstract
1. Introduction
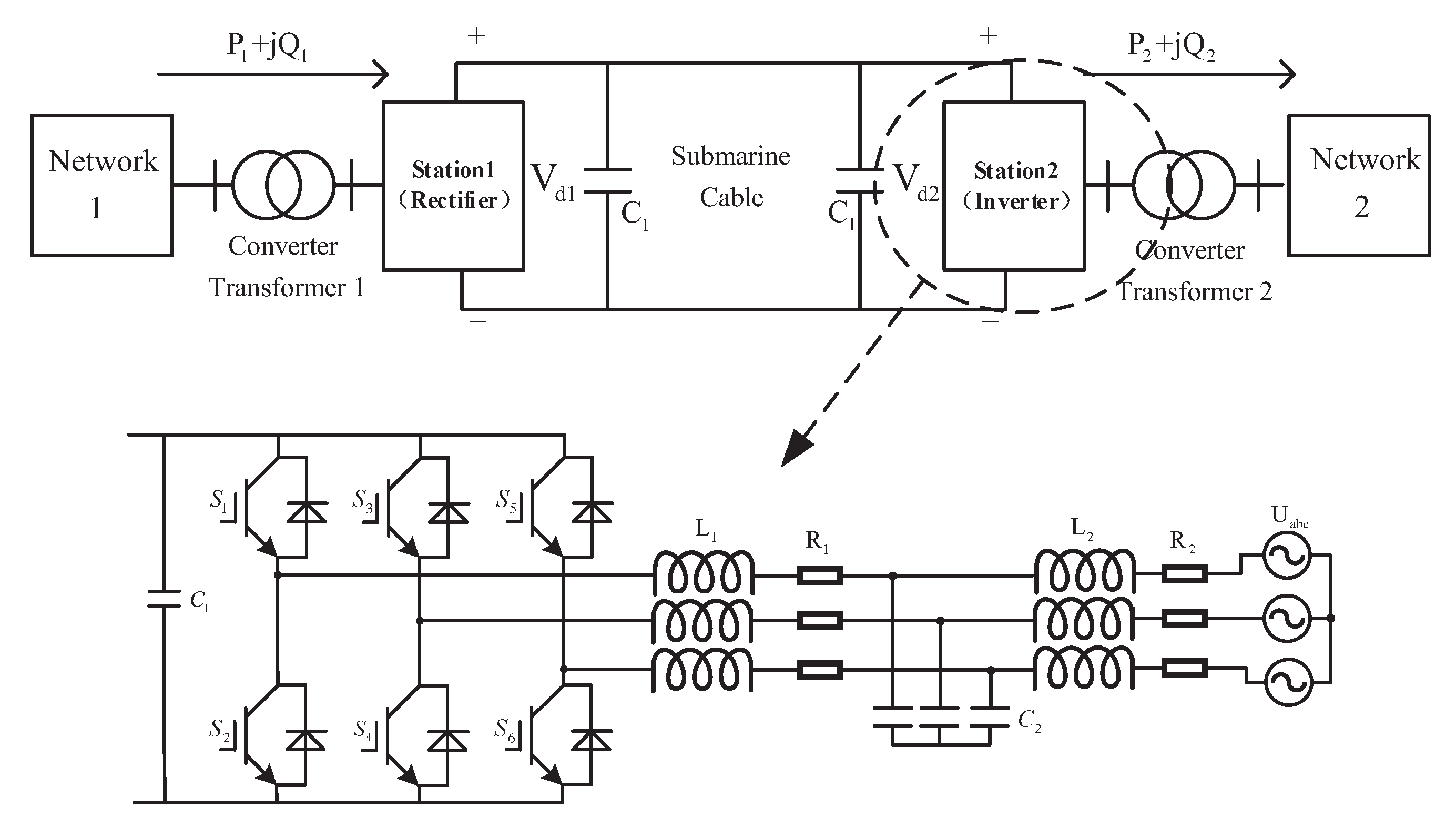
2. Mathematical Model and Preliminaries
3. Dynamic Surface Backstepping Controller Design
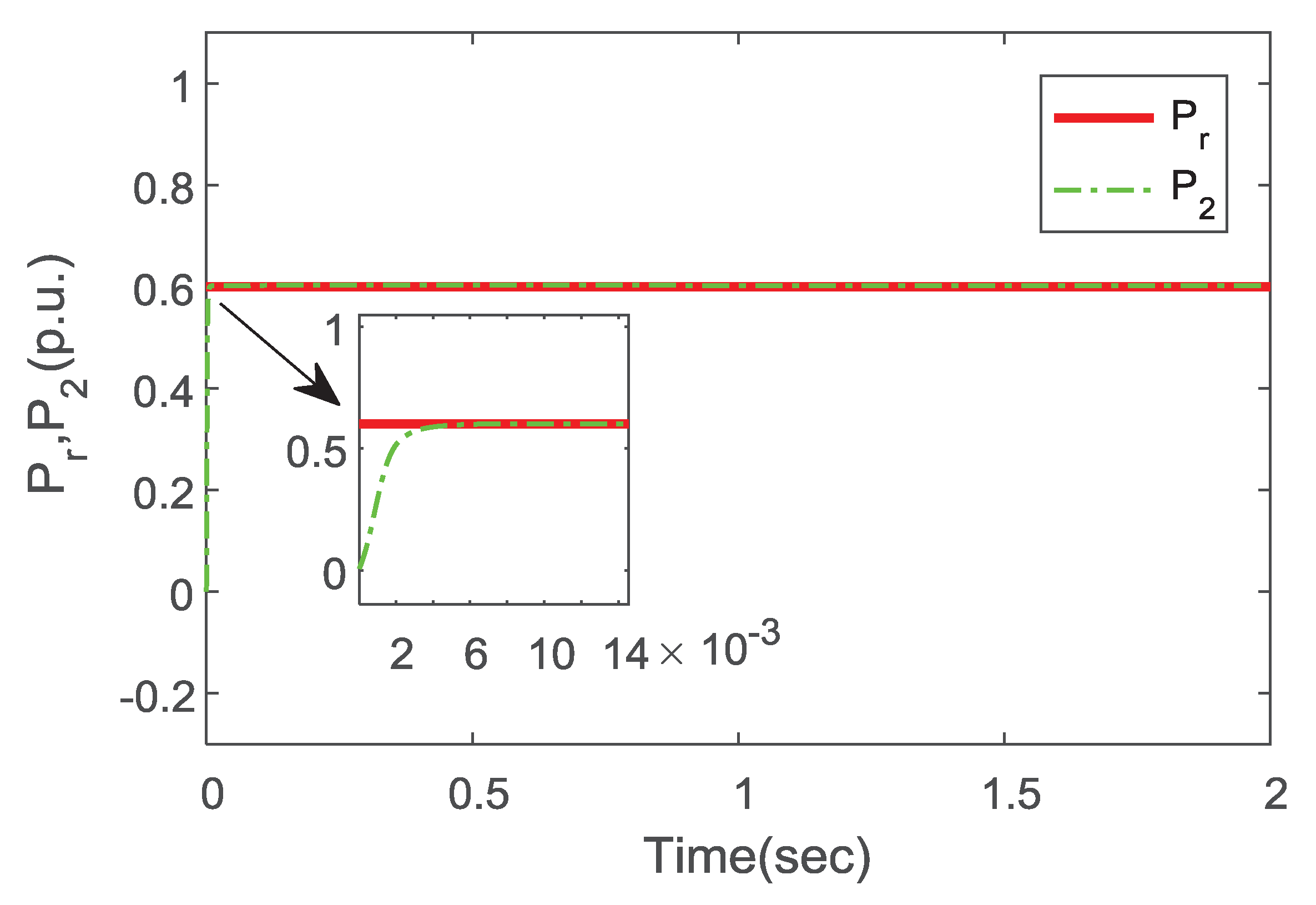
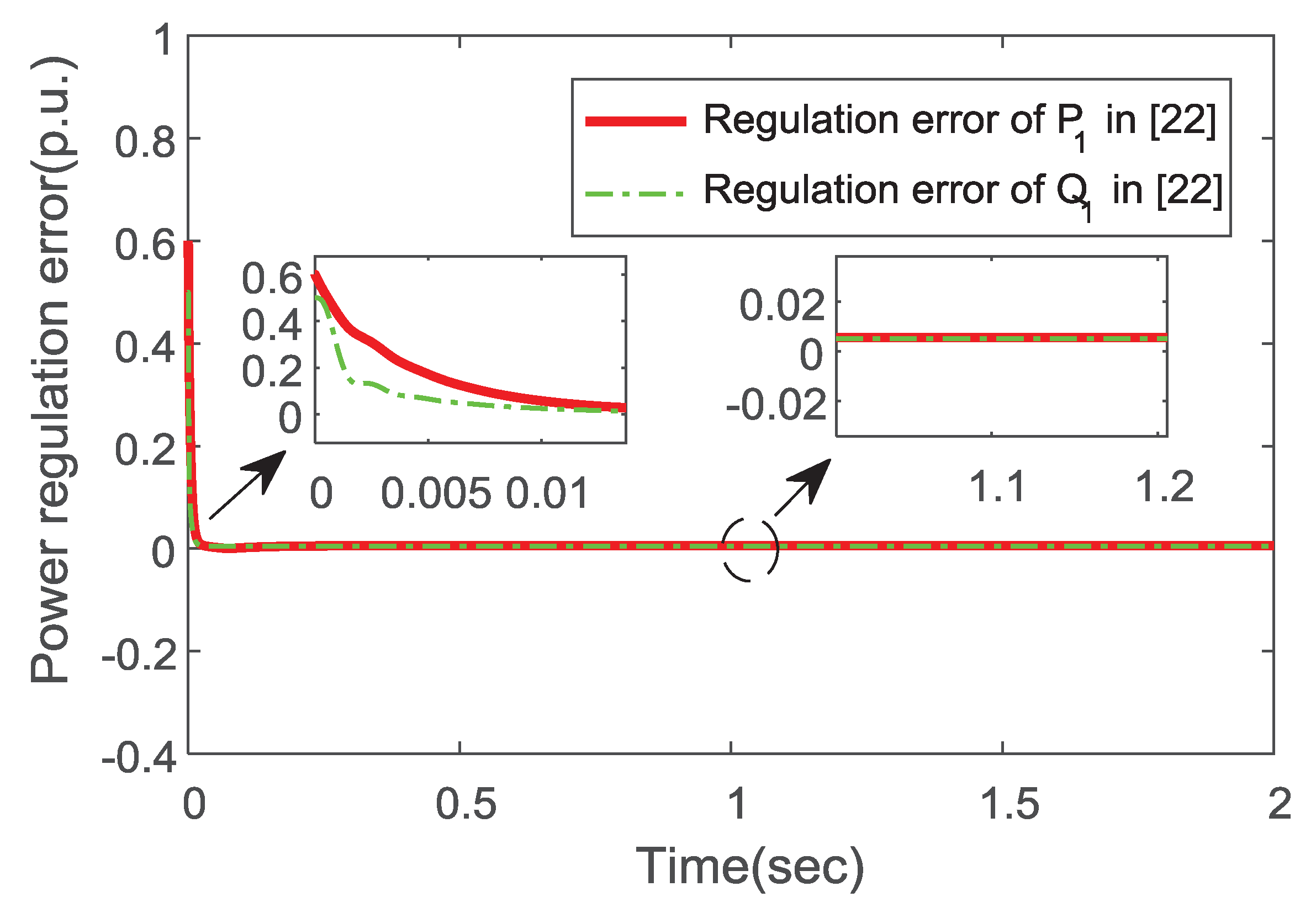
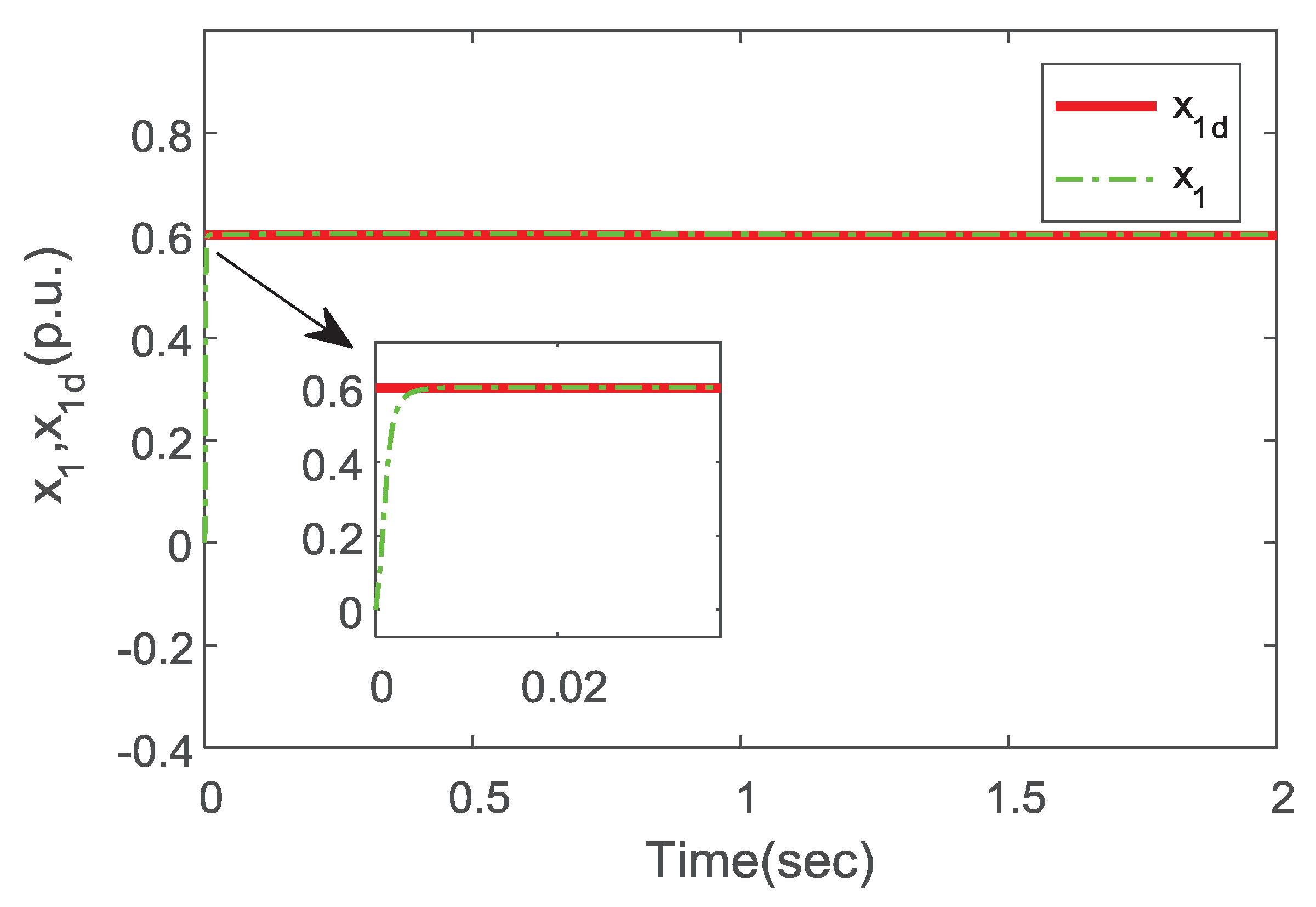
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Stability Proof
References
- Erlich, I.; Shewarega, F.; Feltes, C.; Koch, F.W.; Fortmann, J. Offshore wind power generation technologies. Proc. IEEE 2013, 101, 891–905. [Google Scholar] [CrossRef]
- Vos, K.D.; Driesen, J.; Belmans, R. Assessment of imbalance settlement exemptions for offshore wind power generation in belgium. Energy Policy 2011, 39, 1486–1494. [Google Scholar] [CrossRef]
- Panapakidis, I.P.; Michailides, C.; Angelides, D.C. Implementation of Pattern Recognition Algorithms in Processing Incomplete Wind Speed Data for Energy Assessment of Offshore Wind Turbines. Electronics 2019, 8, 418. [Google Scholar] [CrossRef]
- Salic, T.; Charpentier, J.F.; Benbouzid, M.; Le Boulluec, M. Control Strategies for Floating Offshore Wind Turbine: Challenges and Trends. Electronics 2019, 8, 1185. [Google Scholar] [CrossRef]
- Jo, S.R.; Kim, S.M.; Cho, S.; Lee, K.B. Development of a Hardware Simulator for Reliable Design of Modular Multilevel Converters Based on Junction-Temperature of IGBT Modules. Electronics 2019, 8, 1127. [Google Scholar] [CrossRef]
- Noeding, C.; Felgemacher, C.; Dombert, B.; Zacharias, P. Advantages of IGBT Series Connection in 1.500 V PVinverters. In Proceedings of the International Exhibition and Conference for Power Electronics, Nuremberg, Germany, 19–20 May 2015; VDE: Nuremberg, Germany, 2015; pp. 627–634. [Google Scholar]
- Donlon, J.F.; Motto, E.R.; Ishii, K.; Iida, T. Application advantages of high voltage high current IGBTs with punch through technology. In Proceedings of the Conference Record of the 1997 IEEE Industry Applications Conference Thirty-Second IAS Annual Meeting (IAS ’97), New Orleans, LA, USA, 5–9 October 1997; pp. 955–960. [Google Scholar]
- Li, H.; Xiang, D.W.; Yang, X.W.; Zhang, X.Y. Compressed Sensing Method for IGBT High-Speed Switching Time On-Line Monitoring. IEEE Trans. Ind. Electron. 2018, 66, 3185–3195. [Google Scholar] [CrossRef]
- Ortiz, G.; Uemura, H.; Bortis, D.; Kolar, J.W.; Apeldoorn, O. Modeling of soft-switching losses of IGBTs in high-power high-efficiency dual-active-bridge dc/dc converters. IEEE Trans. Electron Devices 2013, 60, 587–597. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Yazdi, S.S.H.; Moghadam, N.S. Power Flow Control in Multi-Terminal HVDC Grids Using a Serial-Parallel DC Power Flow Controller. IEEE Access 2018, 6, 56934–56944. [Google Scholar] [CrossRef]
- Raza, A.; Akhtar, A.; Jamil, M.; Abbas, G.; Gilani, S.O.; Liu, Y.C.; Khan, M.N.; Izhar, T.; Xu, D.G.; Williams, B.W. A Protection Scheme for Multi-Terminal VSC-HVDC Transmission Systems. IEEE Access 2018, 6, 3159–3166. [Google Scholar] [CrossRef]
- Chen, H.F.; Wakeman, F.; Pitman, J.; Li, G.R. Design, analysis, and testing of PP-IGBT-based submodule stack for the MMC VSC HVDC with 3000A DC bus current. J. Eng. 2019, 16, 917–923. [Google Scholar]
- Zhang, G.B.; Xu, Z. Steady-state model for VSC based HVDC and its controller design. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting, Columbus, OH, USA, 28 January–1 February 2001; pp. 1085–1090. [Google Scholar]
- Tong, S.C.; Li, H.X. Fuzzy adaptive sliding-mode control for mimo nonlinear systems. IEEE Trans Fuzzy Syst. 2003, 11, 354–360. [Google Scholar] [CrossRef]
- Yu, X.H.; Man, Z.H. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinearsystems with uncertain parameters. IEEE Trans. Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef] [PubMed]
- Sira-Ramirez, H. On the sliding mode control of multivariable nonlinear systems. Int. J. Control 1996, 64, 745–765. [Google Scholar] [CrossRef]
- Liu, Y.J.; Tong, S.C. Barrier lyapunov functions for nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica 2017, 76, 143–152. [Google Scholar] [CrossRef]
- Ruan, S.Y.; Li, G.J.; Jiao, X.H.; Sun, Y.Z.; Lie, T.T. Adaptive control design for VSC-HVDC systems based on backstepping method. Electr. Power Syst. Res. 2007, 77, 559–565. [Google Scholar] [CrossRef]
- Jeong, W.; Jeon, S.; Jeong, D. Advanced Backstepping Trajectory Control for Skid-Steered Duct-Cleaning Mobile Platforms. Electronics 2019, 8, 401. [Google Scholar] [CrossRef]
- Yu, J.P.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Z.X.; Wang, G.Q.; Lu, X.F.; Zou, J.L. Backstepping control for voltage source converter-high voltage direct current grid side converter. Control Theory Appl. 2013, 30, 1408–1413. [Google Scholar]
- Zhang, T.; Ge, S.S.; Hang, C.C. Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica 1999, 36, 1835–1846. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Wendy, W.J.; Wang, C.S.; Liu, H.T.; Zhan, X.; Xiao, X.L. Adaptive Voltage Droop Method of Multiterminal VSC-HVDC Systems for DC Voltage Deviation and Power Sharing. IEEE Trans. Power Deliv. 2019, 34, 169–176. [Google Scholar]
- Yu, J.P.; Shi, P.; Dong, W.J.; Chen, B.; Lin, C. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 640–645. [Google Scholar] [CrossRef] [PubMed]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control. 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Li, B.T.; Liu, Y.H.; Li, B.; Xue, Y. Research on the Coordinated Control of the True Bipolar VSC-HVdc Grid Based on Operating Point Optimization. IEEE Trans. Ind. Electron. 2019, 66, 6692–6702. [Google Scholar] [CrossRef]
- Gul, M.; Tai, N.L.; Huang, W.T.; Nadeem, M.H.; Ahmad, M.; Yu, M.D. Technical and Economic Assessment of VSC-HVDC Transmission Model: A Case Study of South-Western Region in Pakistan. Electronics 2019, 8, 1305. [Google Scholar] [CrossRef]
- Xu, L.; Andersen, B.R.; Cartwright, P. Vsc transmission operating under unbalanced ac conditions analysis and control design. IEEE Trans. Power Deliv. 2005, 20, 427–434. [Google Scholar] [CrossRef]
- Pradhan, J.K.; Ghosh, A.; Bhende, C.N. Small-signal modeling and multivariable PI control design of VSC-HVDC transmission link. Electr. Power Syst. Res. 2017, 144, 115–126. [Google Scholar] [CrossRef]
- Geng, Y.C.; Li, Z.X.; Zhang, J.C. Study on a hybrid fuzzy-PI controller applied to VSC-HVDC system. In Proceedings of the 2010 2nd International Asia Conference, Wuhan, China, 6–7 March 2010; pp. 484–487. [Google Scholar]
- Dai, Y.X.; Wang, H.; Zeng, G.Q. Double closed-loop pi control of three-phase inverters by binary-coded extremal optimization. IEEE Access 2016, 4, 7621–7632. [Google Scholar] [CrossRef]
- Liang, H.F.; Li, G.Y.; Li, G.K.; Li, P.; Yin, M. Analysis and design of H∞ controller in VSC HVDC systems. In Proceedings of the 2005 IEEE/PES Transmission and Distribution Conference & Exhibition, Dalian, China, 15–18 August 2005; pp. 1–6. [Google Scholar]
- Ramadan, H.S.; Siguerdidjane, H.; Petit, M. Robust nonlinear control strategy for HVDC light transmission systems. In Proceedings of the 2008 Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 360–365. [Google Scholar]
- Koutiva, X.I.; Vrionis, T.D.; Vovos, N.A.; Giannakopoulos, G.B. Optimal integration of an offshore wind farm to a weak AC grid. IEEE Trans. Power Deliv. 2006, 21, 987–994. [Google Scholar] [CrossRef]
- Vrionis, T.D.; Koutiva, X.I.; Vovos, N.A.; Giannakopoulos, G.B. Control of an HVDC link connecting a wind farm to the grid for fault ride-through enhancement. IEEE Trans. Power Syst. 2007, 22, 2039–2047. [Google Scholar] [CrossRef]
- Ersdal, A.M.; Imsland, L.; Uhlen, K. Coordinated Control of Multiple HVDC links using backstepping. In Proceedings of the 2012 IEEE International Conference on Control Applications, Dubrovnik, Croatia, 3–5 October 2012; pp. 1118–1123. [Google Scholar]
- Xu, L.; Yao, L.Z.; Sasse, C. Grid Integration of Large DFIG-Based Wind Farms Using VSC Transmission. IEEE Trans. Power Syst. 2007, 22, 976–984. [Google Scholar] [CrossRef]
- Liserre, M.; Blaabjerg, F.; Hansen, S. Design and control of an LCL-filter based three-phase active rectifier. IEEE Trans. Ind. Appl. 2005, 41, 1281–1291. [Google Scholar] [CrossRef]
- Malinowski, M.; Szczygiel, W.; Kazmierkowski, M.P. Sensorless operation of active damping methods for three-phase PWM converters. In Proceedings of the 2005 IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 20–23 June 2005; pp. 775–780. [Google Scholar]
- Zhou, X.H.; Fan, J.W.; Huang, A.Q. High-frequency resonance mitigation for plug-in hybrid electric vehicles’ integration with a wide range of grid conditions. IEEE Trans. Power Electron. 2012, 27, 4459–4471. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Bernet, S. New simple active damping of resonance in three-phase PWM converter with LCL filter. In Proceedings of the 2005 IEEE International Conference on Industrial Technology, Hong Kong, China, 14–17 December 2005; pp. 861–865. [Google Scholar]
- Xie, C.; Wang, Y.; Zhong, X.; Chen, C. A novel active damping method for LCL-filter-based shunt active power filter. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics, Hangzhou, China, 28–31 May 2012; pp. 64–69. [Google Scholar]
- Wu, D.; Chen, Y.H.; Hong, H.H.; Zhao, X.D.; Luo, J.; Gu, Z.G. Mathematical model analysis and LCL Filter Design of VSC. In Proceedings of the 2012 IEEE 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; pp. 2700–2804. [Google Scholar]
- Wu, J.; Wang, Z.X.; Jiang, C.H.; Wang, G.Q. Small-capacity experimental prototype of vsc-hvdc for offshore wind farm. Adv. Mater. Res. 2012, 608–609, 601–606. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Systems Parameter | Value | Controller Parameter | Value |
|---|---|---|---|
| 8850 | |||
| 3600 | |||
| 555 | |||
| 7100 | |||
| 59,000 | |||
| E | 80,000 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, C.; Ma, Y.; Yu, J.; Zhao, L. Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics 2020, 9, 333. https://doi.org/10.3390/electronics9020333
Hu C, Ma Y, Yu J, Zhao L. Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics. 2020; 9(2):333. https://doi.org/10.3390/electronics9020333
Chicago/Turabian StyleHu, Chengjiang, Yumei Ma, Jinpeng Yu, and Lin Zhao. 2020. "Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems" Electronics 9, no. 2: 333. https://doi.org/10.3390/electronics9020333
APA StyleHu, C., Ma, Y., Yu, J., & Zhao, L. (2020). Dynamic Surface Backstepping Control for Voltage Source Converter-High Voltage Direct Current Transmission Grid Side Converter Systems. Electronics, 9(2), 333. https://doi.org/10.3390/electronics9020333