A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition



Abstract
1. Introduction
- Defense: The passive and active sonar systems are primarily implemented in military environments to track and detect enemy vessels.
- Bathymetric Studies and underwater object detection: Underwater depth of ocean floors and underwater object detection is possible with the help of sonar systems.
- Pipeline Inspection: High-frequency side-scan sonars are used for this task. Oil and gas companies use this technique to detect possible-damage-causing objects.
- Installation of offshore wind turbines: High-resolution sonars are often used for this task.
- Detection of explosive dangers in an underwater environment: Locating and detecting explosives or other dangers in water is vital as the seafloor gets exploited. Sonar is used for detecting explosive underwater dangers.
- Search and rescue mission: Side-scan sonar system is used for search and rescue missions. Finding hazardous or lost objects in water is an important task.
- Underwater communication: Dedicated sonars are used for underwater communication between vessels and stations.
2. Dataset
- UCI Machine Learning Repository Connectionist Bench (Sonar, Mines vs. Rocks) Dataset
- Side-scan sonar and water profiler data from Lago Grey
- Ireland’s Open Data Portal
- U.S. Government’s Open Data
- Figshare Dataset
2.1. UCI ML Repository—Connectionist Bench (Sonar, Mines vs. Rocks) Dataset
2.2. Side-Scan Sonar and Water Profiler Data from Lago Grey
2.3. Ireland’s Open Data Portal
2.4. U.S. Government’s Open Data
2.5. Figshare Dataset
3. Technologies and Pre-Processing Techniques Implemented for Underwater Sound Monitoring
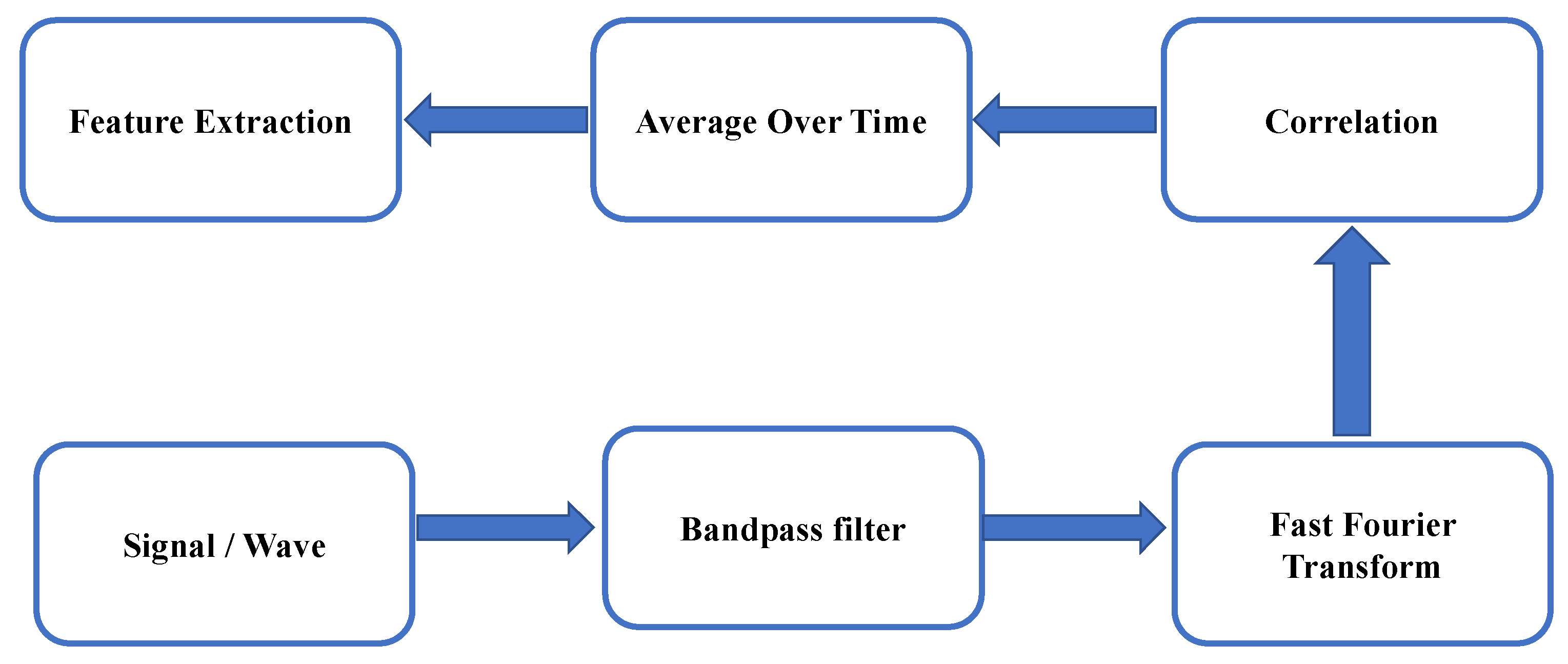
3.1. DEMON Processing
- Selection of direction of interest
- Bandpass filtering to remove the cavitation frequency range of overall signal
- Squaring of the signal
- Normalizing the signal to reduce the background noise and to emphasize the target
- Using STFT to the normalized signal
3.2. Cyclo-Stationary Processing
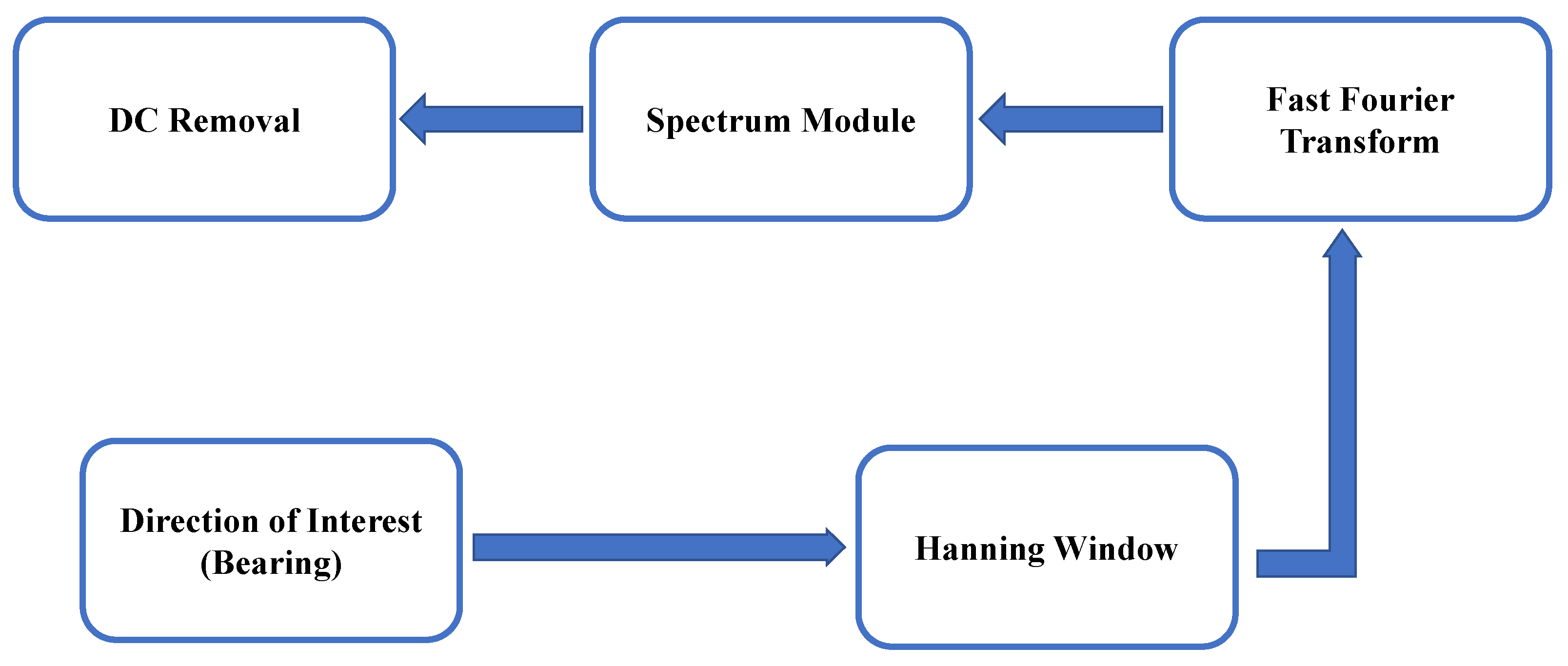
3.3. LOFAR Analysis
- Selection of direction of interest
- Incoming signal processing with Hanning window
- Further processing of the resulting output with FFT
4. Deep Learning-Based Approaches for Sonar Automatic Target Recognition
4.1. Convolutional Neural Networks
4.2. Autoencoders
4.3. Deep Belief Networks
4.4. Generative Adversarial Networks
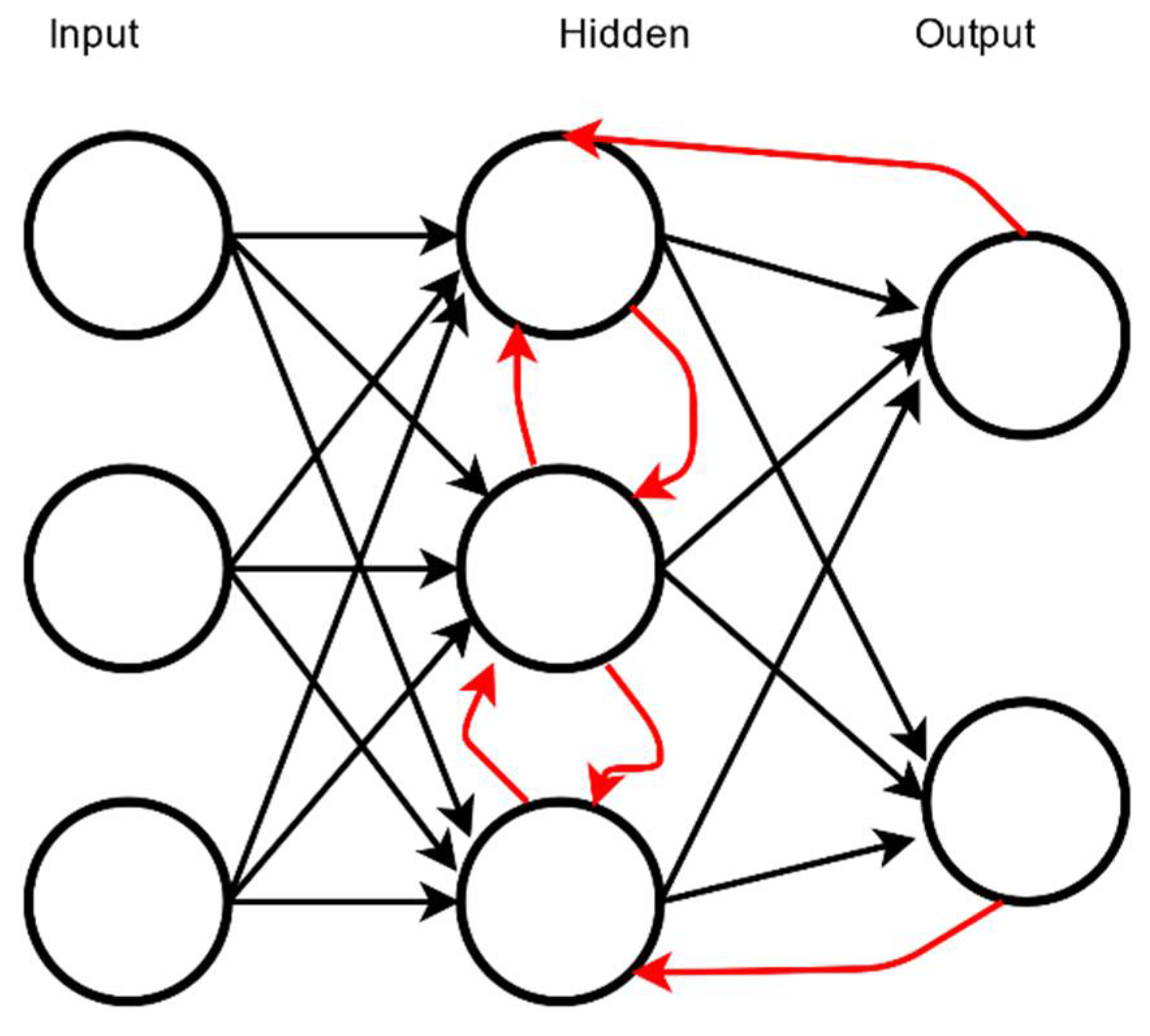
4.5. Recurrent Neural Networks and Long Short-Term Memory
5. Transfer Learning-Based Approaches for Sonar Automatic Target Recognition
6. Challenges in Sonar Signal and Automatic Target Recognition System
7. Challenges Using DL Models for Sonar Target and Object Detection
- DL models, when provided with vast data, perform well. Moreover, collecting vast amounts of sonar data for these algorithms to perform proficiently is a challenge as there are few open source databases. Datasets collected for Navy and military purposes are highly confidential and cannot be used by the common researchers.
- Training deep learning architectures is intensely computational and costly. The most sophisticated models take weeks to train using high-performance GPU machines and require considerable memory [108].
- DL algorithms require vast amounts of training data. Obtaining enormous data for sonar ATR is difficult due to the high cost and limited plausibility of real underwater tests for researchers to conduct. Though different simulation tools generate real-like data and augment data for better training, the simulated data lacks the same type of variability found in real data [33].
- Again, DL algorithms work poorly if the dataset is not balanced. They misclassify the label with a greater quantity of data samples. Moreover, having a balanced sonar dataset is itself a challenging task. Different tactics should be used to train these models when the dataset is not correctly balanced [27].
- DNNs encounter gradient vanishing or exploding, which causes the training process’s degradation, reducing the model accuracy [109]. Thus, network optimization is another challenging task for deep learning researchers.
- The data is not of good quality always. Sometimes it is of poor quality, and redundant too. Even though DL models work great with noisy data, they still struggle to learn from weak quality data [110].
- The DL algorithms like autoencoders require a preliminary training phase and become unproductive when faults exist in the preceding layers. Convolutional neural networks enormously depend on the labeled dataset and might require many layers to find the entire hierarchy. Additionally, deep belief networks do not account for the 2-D structure of input data, which may significantly affect their efficiency and applicability if 2-D images are used as the input. The steps towards further optimizing the model based on maximum likelihood training approximation are not evident in DBN [111]. Moreover, finding Nash-equilibrium in the training of generative adversarial networks is itself a challenging process. Additionally, RRNs encounter the problem of gradient vanishing or exploding [27].
8. Recommendations
- Sonar datasets are not publicly available because of safety and confidentiality purpose. The publicly available datasets are not enough for studying the complex phenomena hidden inside the data as they are taken in a particular environment under specific values of parameters, which might not work for another environment. The authors would like to recommend that future researchers study properly about the regions on which the dataset was taken before developing the ATR model.
- The use of simulated tools is in trend because the cost of collecting real data in the underwater environment is high as the data acquisition systems are expensive. The authors would like to suggest setting the parameters carefully and realistically so that the data obtained from simulated tools appears realistic, helping develop efficient models for real-world problems.
- The dual property of object detection can be addressed using a multi-task loss function to fine-tune misclassifications and localization errors [103].
- The authors would like to recommend using different data augmentation tools for increasing the data size. However, some recommendation tools do not work in terms of sonar imagery, so one should have a thorough study before applying the data augmentation method.
- It is comparatively more straightforward, employing DL algorithms using a balanced dataset and, therefore, most of the study has been done with a balanced dataset. However, imbalanced datasets represent real-world-applications. There are several methods to handle imbalanced data. The authors suggest the researchers have a systematic study of the methods.
- The authors also commend the sonar ATR scholars for imitating the systematic and comprehensive approach in the documentation. Proper documentation helps understand the research carried out, which will be helpful for future researchers.
9. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, H.; Lee, K.; Choo, Y.; Kim, K. Underwater Acoustic Research Trends with Machine Learning: General Background. J. Ocean Eng. Technol. 2020, 34, 147–154. [Google Scholar] [CrossRef]
- Morgan, S. Sound; Heinemann Library: Chicago, IL, USA, 2007. [Google Scholar]
- Huang, T.; Wang, T. Research on Analyzing and Processing Methods of Ocean Sonar Signals. J. Coast. Res. 2019, 94, 208–212. [Google Scholar] [CrossRef]
- Alaie, H.K.; Farsi, H. Passive Sonar Target Detection Using Statistical Classifier and Adaptive Threshold. Appl. Sci. 2018, 8, 61. [Google Scholar] [CrossRef]
- National Oceanic and Atmospheric Administration. What Is Sonar? Available online: https://oceanservice.noaa.gov/facts/sonar.html (accessed on 4 May 2020).
- De Moura, N.N.; de Seixas, J.M.; Ramos, R. Passive Sonar Signal Detection and Classification Based on Independent Component Analysis. In Sonar Systems; InTech: Makati, Philippines, 2011. [Google Scholar] [CrossRef]
- Dura, E. Image Processing Techniques for the Detection and Classification of Man Made Objects in Side-Scan Sonar Images. In Sonar Systems; InTech: Makati, Philippines, 2011. [Google Scholar] [CrossRef]
- Bahrami, H.; Talebiyan, S.R. Sonar Signal Classification Using Neural Networks. Int. J. Comput. Sci. Issues 2015, 12, 129–133. [Google Scholar]
- Hansen, C.H. Fundamentals of Acoustics; Wiley: Hoboken, NJ, USA, 1999. [Google Scholar]
- Introduction to Naval Weapons Engineering. Available online: https://fas.org/man/dod-101/navy/docs/es310/asw_sys/asw_sys.htm (accessed on 4 May 2020).
- Yang, H.; Lee, K.; Choo, Y.; Kim, K. Underwater Acoustic Research Trends with Machine Learning: Passive SONAR Applications. J. Ocean Eng. Technol. 2020, 34, 227–236. [Google Scholar] [CrossRef]
- Wu, M.; Wang, Q.; Rigall, E.; Li, K.; Zhu, W.; He, B.; Yan, T. ECNet: Efficient Convolutional Networks for Side Scan Sonar Image Segmentation. Sensors (Basel) 2019, 19, 2009. [Google Scholar] [CrossRef] [PubMed]
- Gregersen, E. Malaysia Airlines Flight 370 Disappearance. Available online: https://www.britannica.com/event/Malaysia-Airlines-flight-370-disappearance (accessed on 29 May 2020).
- Swindlehurst, A.L.; Jeffs, B.D.; Seco-Granados, G.; Li, J. Chapter 20—Applications of Array Signal Processing. In Academic Press Library in Signal Processing; Theodoridis, S., Chellappa, R., Eds.; Elsevier: Amsterdam, The Netherlands, 2014; Volume 3, pp. 859–953. [Google Scholar] [CrossRef]
- Li, X.K.; Xie, L.; Qin, Y. Underwater Target Feature Extraction Using Hilbert-Huang Transform. J. Harbin Eng. Univ. 2009, 30, 542–546. [Google Scholar] [CrossRef]
- Zhi-guang, S.; Chuan-jun, H.; Sheng-yu, C. Feature Extraction of Ship Radiated Noise Based on Wavelet Multi-Resolution Decomposition. Qingdao Univ. 2003, 16, 44–48. [Google Scholar]
- Song, A.G.; Lu, J.R. Nonlinear Feature Analysis and Extraction of Ship Noise Signal Based on Limit Cycle. Acta Acust. Peking 1996, 24, 226–229. [Google Scholar]
- Zhang, X.; Zhang, X.; Lin, L. Researches on Chaotic Phenomena of Noises Radiated from Ships. Acta Acust. Peking 1998, 23, 134–140. [Google Scholar]
- Wang, J.; Chen, Z. Feature Extraction of Ship-Radiated Noise Based on Intrinsic Time-Scale Decomposition and a Statistical Complexity Measure. Entropy 2019, 21, 1079. [Google Scholar] [CrossRef]
- Yan, J.; Sun, H.; Cheng, E.; Kuai, X.; Zhang, X. Ship Radiated Noise Recognition Using Resonance-Based Sparse Signal Decomposition. Shock Vib. 2017, 2017. [Google Scholar] [CrossRef]
- Hu, G.; Wang, K.; Peng, Y.; Qiu, M.; Shi, J.; Liu, L. Deep Learning Methods for Underwater Target Feature Extraction and Recognition. Comput. Intell. Neurosci. 2018, 2018, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Peyvandi, H.; Farrokhrooz, M.; Roufarshbaf, H.; Park, S.-J. SONAR Systems and Underwater Signal Processing: Classic and Modern Approaches. In Sonar Systems; Kolev, N., Ed.; IntechOpen: London, UK, 2011; pp. 319–327. [Google Scholar] [CrossRef]
- Dey, A. Machine Learning Algorithms: A Review. Int. J. Comput. Sci. Inf. Technol. 2016, 7, 1174–1179. [Google Scholar]
- Baran, R.H.; Coughlin, J.P. A Neural Network for Target Classification Using Passive Sonar. In Proceedings of the Conference on Analysis of Neural Network Applications, Fairfax, VA, USA, 12–18 May 1991; pp. 188–198. [Google Scholar] [CrossRef]
- Ward, M.K.; Stevenson, M. Sonar Signal Detection and Classification Using Artificial Neural Networks. In 2000 Canadian Conference on Electrical and Computer Engineering; IEEE: Piscataway, NJ, USA, 2000; Volume 2, pp. 717–721. [Google Scholar] [CrossRef]
- Ghosh, J.; Deuser, L.M.; Beck, S.D. A Neural Network Based Hybrid System for Detection, Characterization and Classification of Short-Duration Oceanic Signals. IEEE J. Ocean. Eng. 1992, 17, 351–363. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Bearing Fault Detection and Diagnosis Using Case Western Reserve University Dataset With Deep Learning Approaches: A Review. IEEE Access 2020, 8, 93155–93178. [Google Scholar] [CrossRef]
- De Moura, N.N.; De Seixas, J.M. Novelty Detection in Passive SONAR Systems Using Support Vector Machines. In 2015 Latin-America Congress on Computational Intelligence, LA-CCI 2015; Institute of Electrical and Electronics Engineers Inc.: Curitiba, Brazil, 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Soares-Filho, W.; Manoel De Seixas, J.; Pereira Caloba, L. Principal Component Analysis for Classifying Passive Sonar Signals. In ISCAS 2001—2001 IEEE International Symposium on Circuits and Systems (Cat. No.01CH37196); IEEE: Sydney, NSW, Australia, 2001; Volume 3, pp. 592–595. [Google Scholar] [CrossRef]
- Peeples, J.; Cook, M.; Suen, D.; Zare, A.; Keller, J. Comparison of Possibilistic Fuzzy Local Information C-Means and Possibilistic K-Nearest Neighbors for Synthetic Aperture Sonar Image Segmentation; SPIE: Bellingham, WA, USA, 2019; Volume 28. [Google Scholar] [CrossRef]
- Kim, B.; Yu, S.C. Imaging Sonar Based Real-Time Underwater Object Detection Utilizing AdaBoost Method. In Proceedings of the 2017 IEEE OES International Symposium on Underwater Technology (UT), Busan, Korea, 21–24 February 2017. [Google Scholar] [CrossRef]
- Roh, Y.; Heo, G.; Whang, S.E. A Survey on Data Collection for Machine Learning: A Big Data—AI Integration Perspective. IEEE Trans. Knowl. Data Eng. 2019, 99, 1. [Google Scholar] [CrossRef]
- Einsidler, D.; Dhanak, M. A Deep Learning Approach to Target Recognition in Side-Scan Sonar Imagery. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018. [Google Scholar]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep Learning for Visual Understanding: A Review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Zappone, A.; Di Renzo, M.; Debbah, M. Wireless Networks Design in the Era of Deep Learning: Model-Based, AI-Based, or Both? IEEE Trans. Commun. 2019, 67, 7331–7376. [Google Scholar] [CrossRef]
- Zoph, B.; Cubuk, E.D.; Ghiasi, G.; Lin, T.-Y.; Shlens, J.; Le, Q.V. Learning Data Augmentation Strategies for Object Detection. arXiv 2019, arXiv:1906.11172. [Google Scholar]
- Guériot, D.; Sintes, C. Sonar Data Simulation. In Sonar Systems; IntechOpen: London, UK, 2011. [Google Scholar]
- Guériot, D.; Sintes, C.; Garello, R. Sonar Data Simulation Based on Tube Tracing. In OCEANS 2007—Europe; IEEE Computer Society: Washington, DC, USA, 2007. [Google Scholar] [CrossRef]
- Cerqueira, R.; Trocoli, T.; Neves, G.; Joyeux, S.; Albiez, J.; Oliveira, L. A Novel GPU-Based Sonar Simulator for Real-Time Applications. Comput. Graph. 2017, 68, 66–76. [Google Scholar] [CrossRef]
- Saeidi, C.; Hodjatkashani, F.; Fard, A. New Tube-Based Shooting and Bouncing Ray Tracing Method. In Proceedings of the 2009 International Conference on Advanced Technologies for Communications, Hai Phong, Vietnam, 12–14 October 2009; pp. 269–273. [Google Scholar] [CrossRef]
- Borawski, M.; Forczmański, P. Sonar Image Simulation by Means of Ray Tracing and Image Processing. In Enhanced Methods in Computer Security, Biometric and Artificial Intelligence Systems; Springer: Bostan, MA, USA, 2005; pp. 209–214. [Google Scholar] [CrossRef]
- Danesh, S.A. Real Time Active Sonar Simulation in a Deep Ocean Environment. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Elston, G.R.; Bell, J.M. Pseudospectral Time-Domain Modeling of Non-Rayleigh Reverberation: Synthesis and Statistical Analysis of a Sidescan Sonar Image of Sand Ripples. IEEE J. Ocean. Eng. 2004, 29, 317–329. [Google Scholar] [CrossRef]
- Saito, H.; Naoi, J.; Kikuchi, T. Finite Difference Time Domain Analysis for a Sound Field Including a Plate in Water. J. Appl. Phys. 2004, 43, 3176–3179. [Google Scholar] [CrossRef]
- Goddard, R.P. The Sonar Simulation Toolset, Release 4.6: Science, Mathematics, and Algorithms; Washington University Seattle Applied Physics Lab.: Washington, DC, USA, 2008. [Google Scholar]
- Ke, X.; Yuan, F.; Cheng, E. Underwater Acoustic Target Recognition Based on Supervised Feature-Separation Algorithm. Sensors 2018, 18, 4318. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Shen, S.; Yao, X.; Sheng, M.; Wang, C. Competitive Deep-Belief Networks for Underwater Acoustic Target Recognition. Sensors (Switzerland) 2018, 18, 952. [Google Scholar] [CrossRef]
- Galusha, A.; Dale, J.; Keller, J.M.; Zare, A. Deep Convolutional Neural Network Target Classification for Underwater Synthetic Aperture Sonar Imagery. In SPIE 11012, Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXIV; SPIE: Bellingham, WA, USA, 2019; p. 1101205. [Google Scholar] [CrossRef]
- Berthelot, D.; Schumm, T.; Metz, L. BEGAN: Boundary Equilibrium Generative Adversarial Networks. IEEE Access 2017, 6, 11342–11348. [Google Scholar]
- Chawla, N.V.; Bowyer, K.W.; Hall, L.O.; Kegelmeyer, W.P. SMOTE: Synthetic Minority Over-Sampling Technique. J. Artif. Intell. Res. 2002, 16, 321–357. [Google Scholar] [CrossRef]
- UCI Machine Learning Repository: Connectionist Bench (Sonar, Mines vs. Rocks) Data Set. Available online: http://archive.ics.uci.edu/ml/datasets/Connectionist+Bench+%28Sonar%2C+Mines+vs.+Rocks%29 (accessed on 8 May 2020).
- Gorman, R.P.; Sejnowski, T.J. Analysis of Hidden Units in a Layered Network Trained to Classify Sonar Targets. Neural Netw. 1988, 1, 75–89. [Google Scholar] [CrossRef]
- Sugiyama, S.; Minowa, M.; Schaefer, M. Side-Scan Sonar and Water Profiler Data From Lago Grey. Available online: https://data.mendeley.com/datasets/jpz52pm9sc (accessed on 28 June 2020).
- Sugiyama, S.; Minowa, M.; Schaefer, M. Underwater Ice Terrace Observed at the Front of Glaciar Grey, a Freshwater Calving Glacier in Patagonia. Geophys. Res. Lett. 2019, 46, 2602–2609. [Google Scholar] [CrossRef]
- Ireland Government Dataset. Available online: https://data.gov.ie/dataset?q=sonar&sort=title_string+desc (accessed on 28 June 2020).
- US Government Dataset. Available online: https://catalog.data.gov/dataset (accessed on 28 June 2020).
- McCann, E.; Li, L.; Pangle, K.; Johnson, N.; Eickholt, J. Data Descriptor: An Underwater Observation Dataset for Fish Classification and Fishery Assessment. Sci. Data 2018, 5, 1–8. [Google Scholar] [CrossRef]
- Figshare—Credit for All Your Research—Search. Available online: https://figshare.com/search?q=sonar (accessed on 28 June 2020).
- Christ, R.D.; Wernli, R.L. Sonar. In The ROV Manual; Elsevier: Amsterdam, The Netherlands, 2014; pp. 387–424. [Google Scholar] [CrossRef]
- Waite, A.D. Sonar for Practising Engineers, 3rd ed.; Wiley: Hoboken, NJ, USA, 2002. [Google Scholar]
- Miller, B.S. Real-Time Tracking of Blue Whales Using DIFAR Sonobuoys. In Proceedings of the Acoustics 2012—Fremantle, Fremantle, Australia, 21–23 November 2012. [Google Scholar]
- US Department of Commerce. Technologies for Ocean Acoustic Monitoring. Available online: https://oceanexplorer.noaa.gov/technology/acoustics/acoustics.html (accessed on 20 November 2020).
- Rajan, R.; Deepa, B.; Bhai, D.S. Cyclostationarity Based Sonar Signal Processing. Procedia Comput. Sci. 2016, 93, 683–689. [Google Scholar] [CrossRef]
- Assous, S.; Linnett, L. Fourier Extension and Hough Transform for Multiple Component FM Signal Analysis. Digit. Signal Process. 2015, 36, 115–127. [Google Scholar] [CrossRef]
- Woo Chung, K.; Sutin, A.; Sedunov, A.; Bruno, M. DEMON Acoustic Ship Signature Measurements in an Urban Harbor. Adv. Acoust. Vib. 2011, 2011. [Google Scholar] [CrossRef]
- Malik, S.A.; Shah, M.A.; Dar, A.H.; Haq, A.; Khan, A.U.; Javed, T.; Khan, S.A. Comparative Analysis of Primary Transmitter Detection Based Spectrum Sensing Techniques in Cognitive Radio Systems. Aust. J. Basic Appl. Sci. 2010, 4, 4522–4531. [Google Scholar]
- Dimartino, J.C.; Tabbone, S. Detection of Lofar Lines. In International Conference on Image Analysis and Processin; Springer: Berlin/Heidelberg, Germany, 1995; Volume 974, pp. 709–714. [Google Scholar] [CrossRef]
- Park, J.; Jung, D.J. Identifying Tonal Frequencies in a Lofargram with Convolutional Neural Networks. In 2019 19th International Conference on Control, Automation and Systems (ICCAS 2019); IEEE: Jeju, Korea, 2019; pp. 338–341. [Google Scholar] [CrossRef]
- Kong, W.; Yu, J.; Cheng, Y.; Cong, W.; Xue, H. Automatic Detection Technology of Sonar Image Target Based on the Three-Dimensional Imaging. J. Sens. 2017, 2017. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Sathya, R.; Abraham, A. Comparison of Supervised and Unsupervised Learning Algorithms for Pattern Classification. Int. J. Adv. Res. Artif. Intell. 2013, 2, 34–38. [Google Scholar] [CrossRef]
- Reddy, Y.C.P.; Viswanath, P.; Eswara Reddy, B. Semi-Supervised Learning: A Brief Review. Int. J. Eng. Technol. 2018, 7, 81. [Google Scholar] [CrossRef]
- Torrey, L.; Shavlik, J. Transfer Learning. In Handbook of Research on Machine Learning Applications; Olivas, E.S., Guerrero, J.D.M., Martinez-Sober, M., Magdalena-Benedito, J.R., Serrano, L., Eds.; IGI Global: Hershey, PA, USA, 2009; pp. 1–22. [Google Scholar] [CrossRef]
- Wang, M.; Deng, W. Deep Visual Domain Adaptation: A Survey. Neurocomputing 2018, 312, 135–153. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Ha, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 84–90. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Deep Learning-Based Bearing Fault Detection Using 2-D Illustration of Time Sequence. In Proceedings of the 2020 International Conference on Information and Communication Technology (ICTC2020), Jeju, Korea, 21–23 October 2020; pp. 562–566. [Google Scholar]
- Kiranyaz, S.; Ince, T.; Hamila, R.; Gabbouj, M. Convolutional Neural Networks for Patient- Specific ECG Classification. In 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC); IEEE: Milan, Italy, 2015; pp. 2608–2611. [Google Scholar]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D Convolutional Neural Networks and Applications—A Survey. arXiv 2019, arXiv:1905.03554. [Google Scholar]
- Lee, S.; Park, B.; Kim, A. Deep Learning from Shallow Dives: Sonar Image Generation and Training for Underwater Object Detection. arXiv 2018, arXiv:1810.07990. [Google Scholar]
- LabelMe. Available online: http://labelme.csail.mit.edu/Release3.0/ (accessed on 3 October 2020).
- Valdenegro-Toro, M. Object Recognition in Forward-Looking Sonar Images with Convolutional Neural Networks. In OCEANS 2016 MTS/IEEE Monterey, OCE 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Valdenegro-Toro, M. End- To-End Object Detection and Recognition in Forward-Looking Sonar Images with Convolutional Neural Networks. In Autonomous Underwater Vehicles 2016, AUV 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 144–150. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Lee, E.H.; Bae, C.H.; Lee, S. Multiple Object Detection Based on Clustering and Deep Learning Methods. Sensors (Switzerland) 2020, 20, 4424. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning. Available online: https://www.deeplearningbook.org/contents/autoencoders.html (accessed on 22 December 2019).
- Mello, V.D.S.; De Moura, N.N.; De Seixas, J.M. Novelty Detection in Passive Sonar Systems Using Stacked AutoEncoders. In 2018 International Joint Conference on Neural Networks (IJCNN); Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; Volume 2018. [Google Scholar] [CrossRef]
- Kim, J.; Song, S.; Yu, S.C. Denoising Auto-Encoder Based Image Enhancement for High Resolution Sonar Image. In 2017 IEEE OES International Symposium on Underwater Technology, UT 2017; Institute of Electrical and Electronics Engineers Inc.: Busan, Korea, 2017. [Google Scholar] [CrossRef]
- Testolin, A.; Diamant, R. Combining Denoising Autoencoders and Dynamic Programming for Acoustic Detection and Tracking of Underwater Moving Targets†. Sensors (Basel) 2020, 20, 2945. [Google Scholar] [CrossRef] [PubMed]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Hua, Y.; Guo, J.; Zhao, H. Deep Belief Networks and Deep Learning. In Proceedings of the 2015 International Conference on Intelligent Computing and Internet of Things (ICIT), Harbin, China, 17–18 January 2015; pp. 1–4. [Google Scholar]
- Seok, J. Active Sonar Target Classification Using Multi-Aspect Sensing and Deep Belief Networks. Int. J. Eng. Res. Technol. 2018, 11, 1999–2008. [Google Scholar]
- Terayama, K.; Shin, K.; Mizuno, K.; Tsuda, K. Integration of Sonar and Optical Camera Images Using Deep Neural Network for Fish Monitoring. Aquac. Eng. 2019, 86, 102000. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-abadie, J.; Mirza, M.; Xu, B.; Warde-farley, D. Generative Adversarial Nets. In Proceedings of the IPS 2014: Neural Information Processing Systems Conference, Montreal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar] [CrossRef]
- Arjovsky, M.; Chintala, S. Wasserstein Generative Adversarial Networks. Available online: https://arxiv.org/pdf/1701.07875.pdf (accessed on 28 May 2020).
- Fuchs, L.R.; Larsson, C.; Gällström, A. Deep Learning Based Technique for Enhanced Sonar Imaging. In Proceedings of the Underwater Acoustics Conference and Exhibition, Kalamata, Greeces, 30 June–5 July 2019. [Google Scholar]
- Jegorova, M.; Karjalainen, A.I.; Vazquez, J.; Hospedales, T. Full-Scale Continuous Synthetic Sonar Data Generation with Markov Conditional Generative Adversarial Networks. In International Conference on Robotics and Automation (ICRA); IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Karjalainen, A.I.; Mitchell, R.; Vazquez, J. Training and Validation of Automatic Target Recognition Systems Using Generative Adversarial Networks. In 2019 Sensor Signal Processing for Defence Conference, SSPD 2019; Institute of Electrical and Electronics Engineers Inc.: Brighton, UK, 2019. [Google Scholar] [CrossRef]
- CS 230—Recurrent Neural Networks Cheatsheet. Available online: https://stanford.edu/~shervine/teaching/cs-230/cheatsheet-recurrent-neural-networks (accessed on 29 December 2019).
- Gimse, H. Classification of Marine Vessels Using Sonar Data and a Neural Network. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2017. [Google Scholar]
- Perry, S.W.; Guan, L. A Recurrent Neural Network for Detecting Objects in Sequences of Sector-Scan Sonar Images. IEEE J. Ocean. Eng. 2004, 29, 857–871. [Google Scholar] [CrossRef]
- Tan, C.; Sun, F.; Kong, T.; Zhang, W.; Chao, Y.; Liu, C. A Survey on Deep Transfer Learning. In the 27th International Conference on Artificial Neural Networks (ICANN 2018); Tan, C., Sun, F., Kong, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11141 LNCS, pp. 270–279. [Google Scholar]
- Nguyen, H.T.; Lee, E.H.; Lee, S. Study on the Classification Performance of Underwater Sonar Image Classification Based on Convolutional Neural Networks for Detecting a Submerged Human Body. Sensors (Switzerland) 2019, 20, 94. [Google Scholar] [CrossRef]
- Karimanzira, D.; Renkewitz, H.; Shea, D.; Albiez, J. Object Detection in Sonar Images. Electron 2020, 9, 1180. [Google Scholar] [CrossRef]
- Sung, M.; Kim, J.; Kim, J.; Yu, S.C. Realistic Sonar Image Simulation Using Generative Adversarial Network. In 12th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles CAMS 2019; Elsevier Ltd.: Daejeon, Korea, 2019; Volume 52, pp. 291–296. [Google Scholar] [CrossRef]
- Pailhas, Y.; Petillot, Y.; Capus, C. High-Resolution Sonars: What Resolution Do We Need for Target Recognition? EURASIP J. Adv. Signal Process. 2010, 2010. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Zuba, M.; Peng, Z.; Cui, J.H. Challenges and Opportunities of Underwater Cognitive Acoustic Networks. IEEE Trans. Emerg. Top. Comput. 2014, 2, 198–211. [Google Scholar] [CrossRef]
- Saufi, S.R.; Ahmad, Z.A.B.; Leong, M.S.; Lim, M.H. Challenges and Opportunities of Deep Learning Models for Machinery Fault Detection and Diagnosis: A Review. IEEE Access 2019, 7, 122644–122662. [Google Scholar] [CrossRef]
- Westlake, N.; Cai, H.; Hall, P. Detecting People in Artwork with CNNs. Lect. Notes Comput. Sci. 2016, 9913 LNCS, 825–841. [Google Scholar] [CrossRef]
- Too, E.C.; Yujian, L.; Njuki, S.; Yingchun, L. A Comparative Study of Fine-Tuning Deep Learning Models for Plant Disease Identification. Comput. Electron. Agric. 2019, 161, 272–279. [Google Scholar] [CrossRef]
- Zhang, Q.; Yang, L.T.; Chen, Z.; Li, P. A Survey on Deep Learning for Big Data. Inf. Fusion 2018, 42, 146–157. [Google Scholar] [CrossRef]
- Voulodimos, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E. Deep Learning for Computer Vision: A Brief Review. Comput. Intell. Neurosci. 2018. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A. R. 1 | Method | Other Details | Remarks |
|---|---|---|---|
| [68] |
|
|
|
| [48] |
|
|
|
| [80] |
|
|
|
| [12] |
|
|
|
| [82] |
|
|
|
| [84] |
|
|
|
| [86] |
|
|
|
| [87] |
|
|
|
| [88] |
|
|
|
| [91] |
|
|
|
| [47] |
|
|
|
| [92] |
|
|
|
| [87] |
|
|
|
| [95] |
|
|
|
| [96] |
|
|
|
| [97] |
|
|
|
| [100] |
|
|
|
| A. R. | Method | Other Details | Remarks |
|---|---|---|---|
| [102] |
|
|
|
| [33] |
|
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neupane, D.; Seok, J. A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition. Electronics 2020, 9, 1972. https://doi.org/10.3390/electronics9111972
Neupane D, Seok J. A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition. Electronics. 2020; 9(11):1972. https://doi.org/10.3390/electronics9111972
Chicago/Turabian StyleNeupane, Dhiraj, and Jongwon Seok. 2020. "A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition" Electronics 9, no. 11: 1972. https://doi.org/10.3390/electronics9111972
APA StyleNeupane, D., & Seok, J. (2020). A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition. Electronics, 9(11), 1972. https://doi.org/10.3390/electronics9111972