Requirements for Validation of Dynamic Wind Turbine Models: An International Grid Code Review

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Spanish Grid Code: Use of Dynamic WT Simulation Models
2.1. Po 12.3: Procedure for Verification, PVVC
2.2. Spanish New Technical Supervision Standard: NTS
- Conformity assessment procedure through equipment certificates. This consists of first obtaining the equipment certificates, i.e., obtaining certificates for the UGE and CAMGE units. These certificates shall then be provided to the power plants’ owners to obtain the final certificate of the MGE.
- Conformity assessment procedure through testing. This procedure may be followed with two objectives: (1) to obtain conformity with the technical requirement considered through directly testing the MGE, or (2) to certify the UGEs and CAMGEs for this requirement through testing.
- Conformity assessment procedure through simulation. This procedure may be followed with two objectives: (1) to obtain conformity with the technical requirement considered through directly simulating the MGE, or (2) to certify the UGEs and CAMGEs for this requirement through simulation.
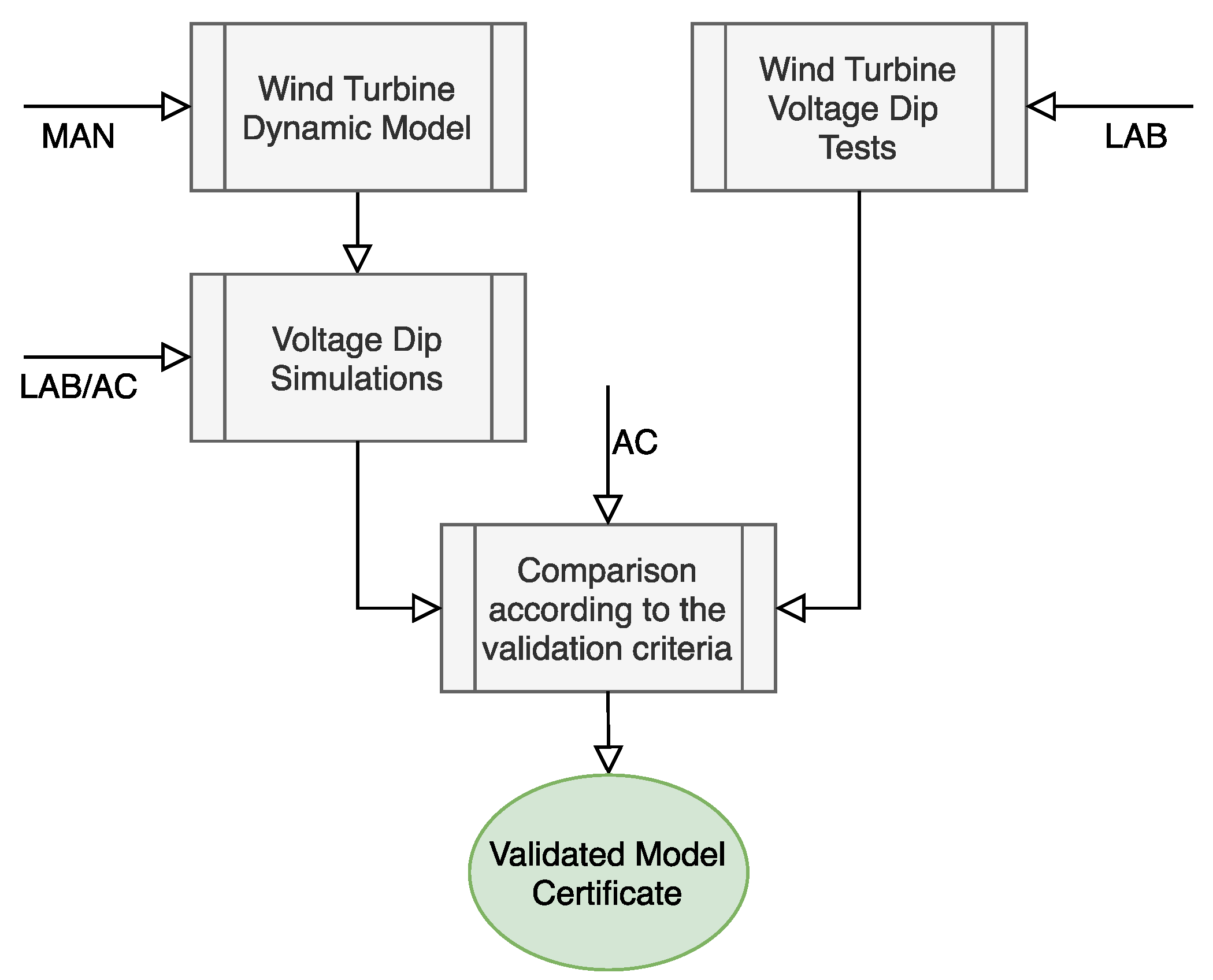
- Having a dynamic simulation model of MGE, UGE and/or CAMGE validated by an authorized certification entity, according to the validation guidelines described below.
- Conducting the simulation of the validated dynamic models according to the technical requirements, which is conducted by an accredited entity.
- Assessment of the simulation results by an authorized certification entity, and issuance of an equipment certificate for the UGE, CAMGE and/or MGE when the evaluation is positive.
- Mean Error (ME). ME is defined as the mean value of the error over the corresponding time window. It is related to the steady-state performance of the model (see Equation (4)).
- Mean Absolute Error (MAE). MAE is the mean value of the absolute error. It is also concerned with the steady-state performance of the model, albeit based on the mean deviation (see Equation (5)).
- Maximum Absolute Error (MXE). MXE is the maximum value of the absolute error. It focuses on giving information about the transient performance of the model (see Equation (6)).
3. International Grid Codes: Overview of WT Models Validation
3.1. German Grid Code
3.2. South African Grid Connection Code
- Sample-by-sample error, calculated as a percentage ratio of the difference between the measured and simulated values, once the samples have been synchronized, and the maximum peak value of measured voltage or current in any of the three phases.
- Average error, calculated as the average of the error values obtained during a certain period.
- Average absolute error, calculated as the average of the absolute error values obtained over a certain period.
- Error band. A permissible error band is defined in each case. In all cases, at least 90% of the sample-by-sample error values must be within this band. Therefore, only 10% of errors may be higher than this band.
4. Validating Detailed and Generic WT Simulation Models Following PVVC NTS and TG 4 Guidelines: Application Examples
4.1. PVVC Validation Criteria Applied to the Detailed G52 WT Simulation Model
4.2. NTS and TG 4 Validation Criteria Applied to the Generic IEC DFIG WT Simulation Model
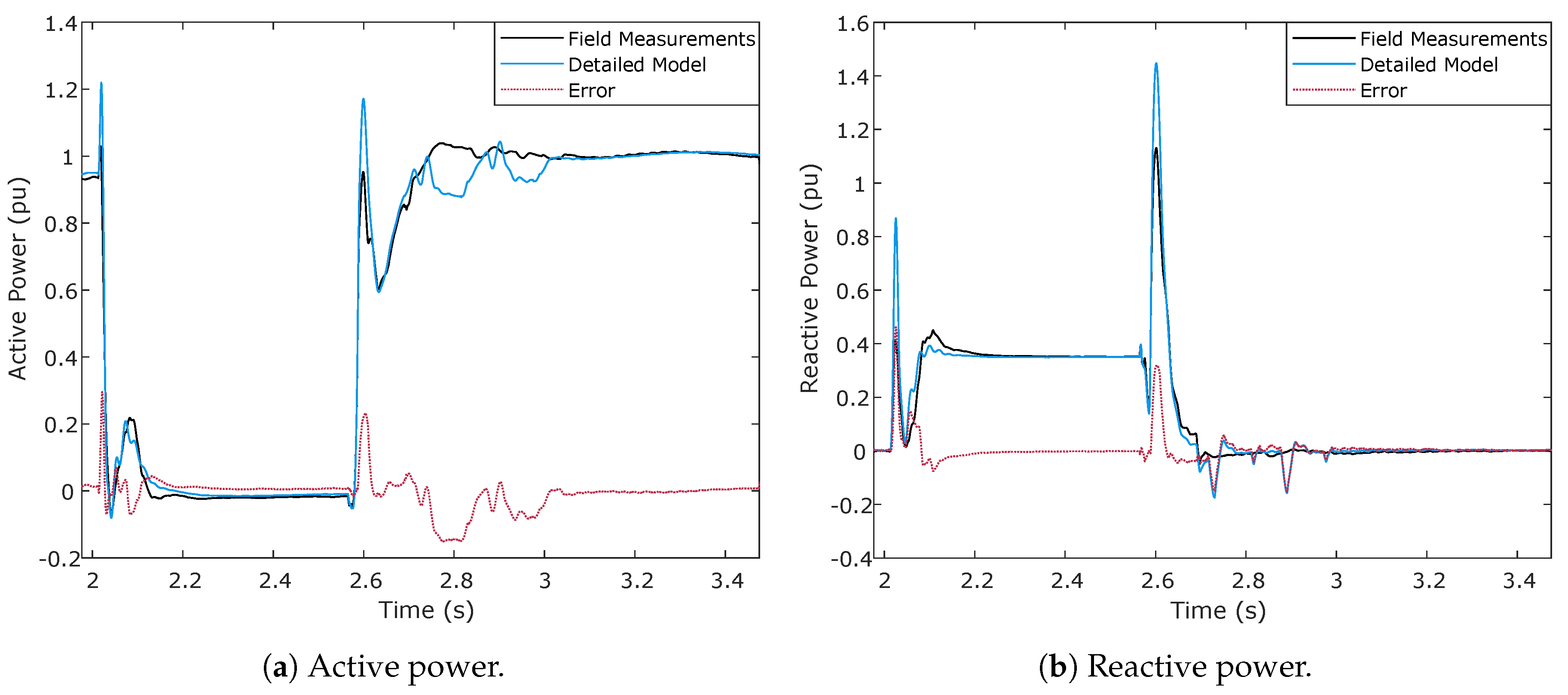
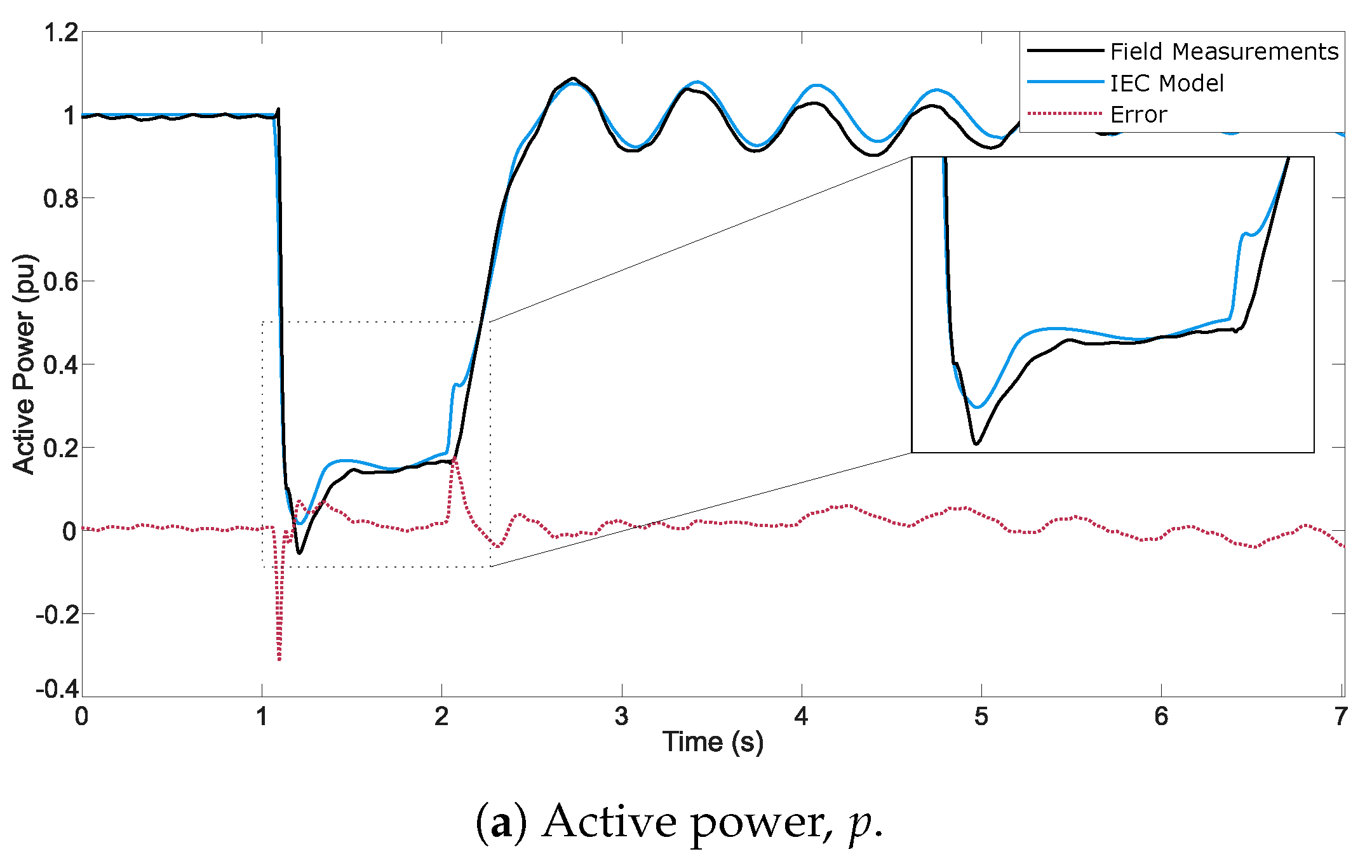
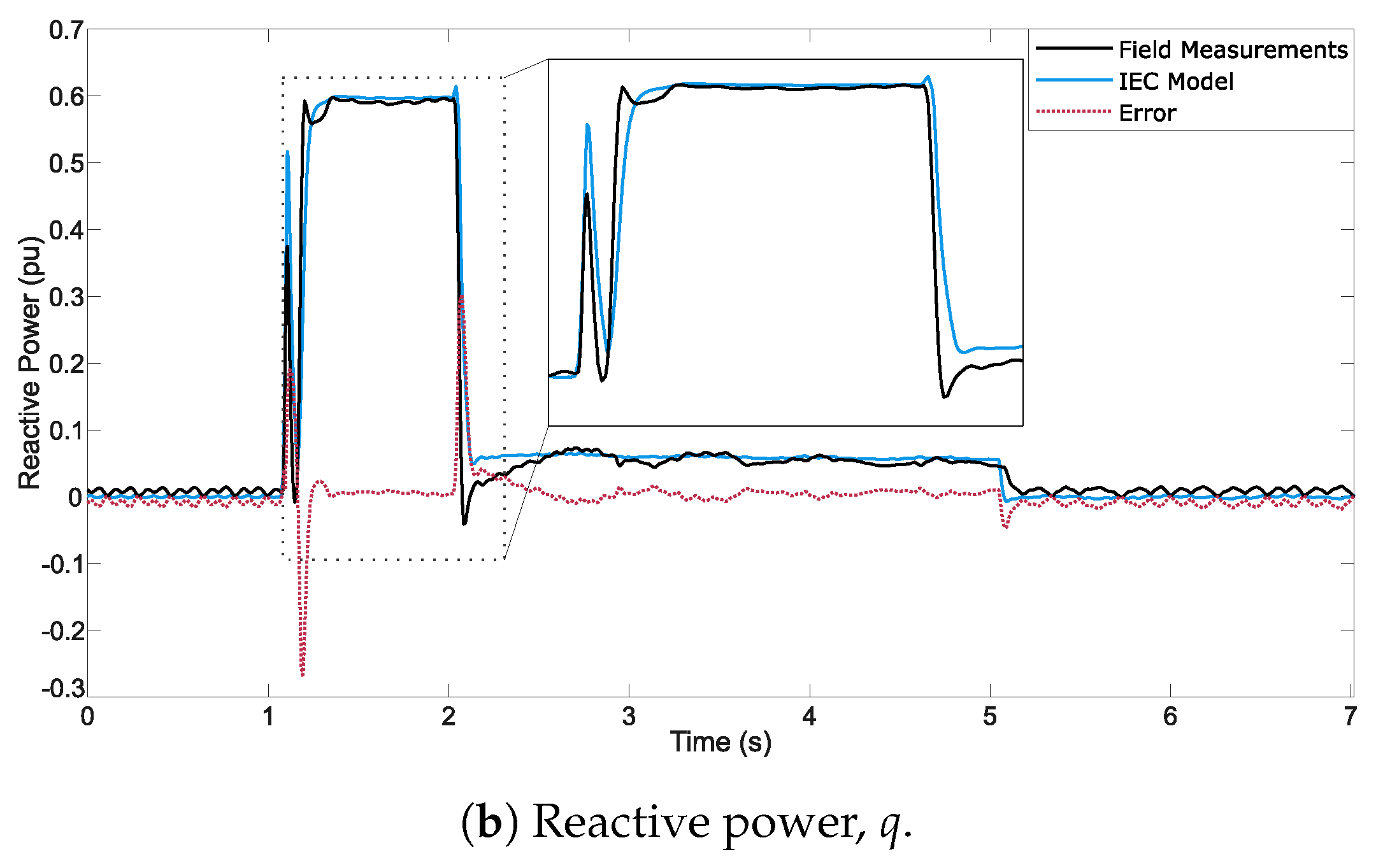
- Test case 1 (TC1), WT operating at full load conditions: Residual voltage of pu and dip duration of ms. The active and reactive power responses of this test are shown in Figure 5.
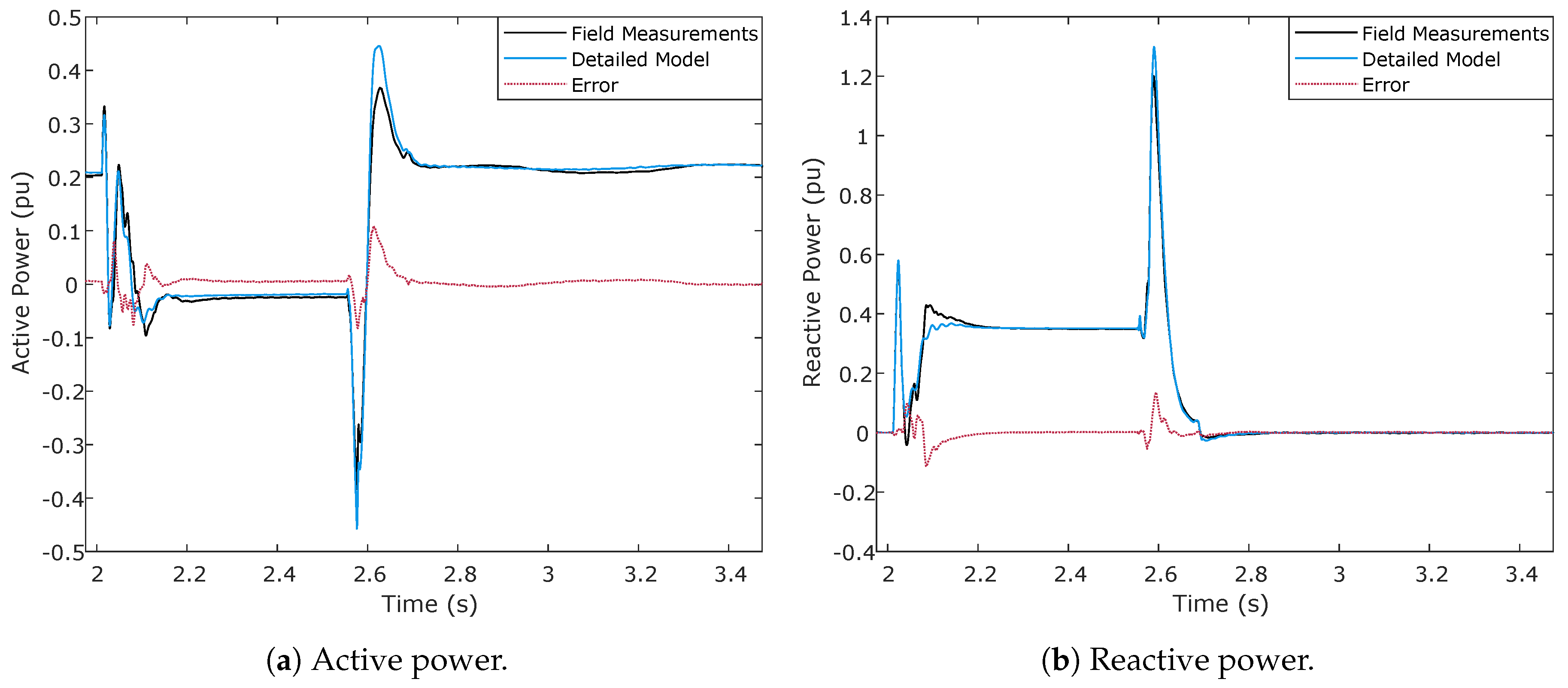
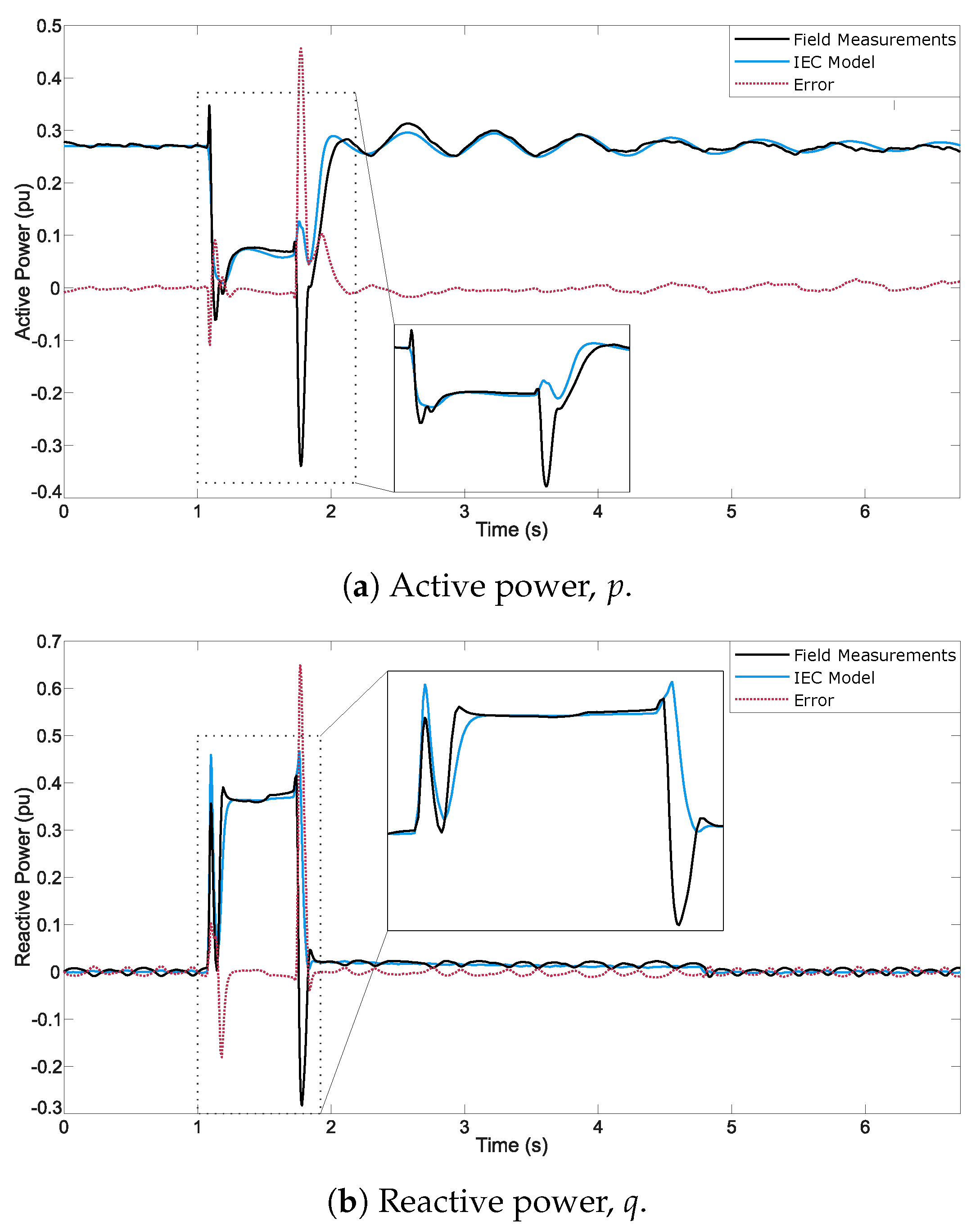
- Test case 2 (TC2), WT operating at partial load conditions of pu: residual voltage of pu and dip duration of ms. The active and reactive power responses of this test are shown in Figure 6.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Authorized Certifier |
| AEE | Asociación Empresarial Eólica—Spanish wind energy association |
| CAMGE | Componentes Adicionales del MGE—Additional MGE components |
| DC | Direct Current |
| DFIG | Doubly-Fed Induction Generator |
| DSL | DIgSILENT Simulation Language |
| DSO | Distribution System Operators |
| EMT | Electromagnetic Transients |
| FRT | Fault Ride-Through |
| GDP | Gross Domestic Product |
| IEC | International Electrotechnical Commission |
| LAB | Laboratories |
| LVRT | Low-Voltage-Ride-Through |
| MAE | Mean Absolute Error |
| MAN | Manufacturer |
| ME | Mean Error |
| MGE | Módulos de Generación de Electricidad—Power generation modules |
| MXE | Maximum Absolute Error |
| NERSA | National Energy Regulator of South Africa |
| NTS | Norma Técnica de Supervisión—Technical supervision standard |
| PF | DIgSILENT PowerFactory |
| PGS | Power Generating Systems |
| PGU | Power Generating Units |
| POC | Point of Coupling |
| PO 12.3 | Operation Procedure 12.3 |
| PVVC | Procedure for Verification, Validation and Certification |
| REE | Red Eléctrica de España |
| RES | Renewable Energy Sources |
| RMS | Root Mean Square |
| SO | System Operator |
| TNSP | Transmission Network Service Providers |
| TSO | Transmission System Operators |
| UGE | Unidades de Generación de Electricidad—Power generation units |
| WECC | Western Electricity Coordinating Council |
| WPP | Wind Power Plants |
| WT | Wind Turbine |
| WTT | Wind Turbine Terminals |
References
- Global Wind Energy Council, GWEC. Global Wind Report 2019; GWEC: Brussels, Belgium, 2020. [Google Scholar]
- WindEurope. Wind in Power: 2019 European Statistics; Wind Europe: Brussels, Belgium, 2019. [Google Scholar]
- Asociación Empresarial Eólica (Spanish Wind Energy Association). What is Wind Energy? 2020. Available online: https://www.aeeolica.org/en/about-wind-energy/what-is-wind-energy (accessed on 8 March 2020).
- Asociación Empresarial Eólica (Spanish Wind Energy Association). Mapa de Instalaciones eóLicas. 2020. Available online: https://www.aeeolica.org/sobre-la-eolica/la-eolica-espana/mapa-de-instalaciones-eolicas (accessed on 9 January 2020).
- Yongning, C.; Yan, L.; Zhen, L.; Ziyu, C.; Hongzhi, L. Study on Grid-connected Renewable Energy Grid Code Compliance. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 72–75. [Google Scholar]
- Ayodele, T.R.; Jimoh, A.; Munda, J.L.; Agee, J. Challenges of Grid Integration of Wind Power on Power System Grid Integrity: A Review. Int. J. Renew. Energy Res. 2012, 2, 9. [Google Scholar]
- Islam, M.M.; Hossain, E.; Padmanaban, S.; Brice, C.W. A New Perspective of Wind Power Grid Codes Under Unbalanced and Distorted Grid Conditions. IEEE Access 2020, 8, 15931–15944. [Google Scholar] [CrossRef]
- Díaz-González, F.; Hau, M.; Sumper, A.; Gomis-Bellmunt, O. Participation of wind power plants in system frequency control: Review of grid code requirements and control methods. Renew. Sustain. Energy Rev. 2014, 34, 551–564. [Google Scholar] [CrossRef]
- Tarafdar Hagh, M.; Khalili, T. A review of fault ride through of PV and wind renewable energies in grid codes. Int. J. Energy Res. 2019, 43, 1342–1356. [Google Scholar] [CrossRef]
- Hiremath, R.; Moger, T. Comprehensive review on low voltage ride through capability of wind turbine generators. Int. Trans. Electr. Energy Syst. 2020, e12524. [Google Scholar] [CrossRef]
- Karbouj, H.; Rather, Z.H. A Comparative Study on the Impact of Grid Code Regulations on Stability of Wind Integrated Power Systems. In Proceedings of the 2019 1st Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 12–15 June 2019; pp. 342–347. [Google Scholar]
- Tsili, M.; Patsiouras, C.; Papathanassiou, S. Grid code requirements for large wind farms: A review of technical regulations and available wind turbine technologies. In Proceedings of the EWEC, Brussels, Belgium, 31 March–3 April 2008; pp. 1–10. [Google Scholar]
- Gao, D.W.; Muljadi, E.; Tian, T.; Miller, M.; Wang, W. Comparison of Standards and Technical Requirements of Grid-Connected Wind Power Plants in China and the United States; Technical Report; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2016. [Google Scholar]
- Chowdhury, A.H.; Mannan, T.I.; Irfan, N.; Zuhaira, A. A Comparative Study of Bangladesh Grid Code. In Proceedings of the 2019 IEEE Asia Power and Energy Engineering Conference (APEEC), Chengdu, China, 29–31 March 2019; pp. 161–166. [Google Scholar]
- Endegnanew, A.; Tedeschi, E.; Marvik, J.; Torres-Olguin, R.; d’Arco, S. Marinet deliverable 2.26—Collation of European grid codes. Mar. Renew. Infrastruct. Netw. Tech. Rep. Mar. 2013, 1–39. [Google Scholar]
- Robles, E.; Haro-Larrode, M.; Santos-Mugica, M.; Etxegarai, A.; Tedeschi, E. Comparative analysis of European grid codes relevant to offshore renewable energy installations. Renew. Sustain. Energy Rev. 2019, 102, 171–185. [Google Scholar] [CrossRef]
- Sourkounis, C.; Tourou, P. Grid code requirements for wind power integration in Europe. In Conference Papers in Energy; Hindawi: Cairo, Egypt, 2013; Volume 2013. [Google Scholar]
- Rona, B.; Güler, Ö. Power system integration of wind farms and analysis of grid code requirements. Renew. Sustain. Energy Rev. 2015, 49, 100–107. [Google Scholar] [CrossRef]
- Barus, D.H.; Dalimi, R. A review of Indonesia grid code adaptation toward variable renewable energy penetration. In Proceedings of the AIP Conference, Padang, Indonesia, 22–24 July 2019; AIP Publishing LLC: Melville, NY, USA, 2020; Volume 2230, p. 050009. [Google Scholar]
- Wu, Y.K.; Chang, S.M.; Mandal, P. Grid-connected wind power plants: A survey on the integration requirements in modern grid codes. IEEE Trans. Ind. Appl. 2019, 55, 5584–5593. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- IEC 61400-27-1 Ed. 2. Wind turbines—Part 27-1: Electrical Simulation Models for Wind Power Generation—Wind Turbines; International Electrotechnical Commission: Geneva, Switzerland, 2020.
- WECC REMTF. WECC Second Generation of Wind Turbine Models Guidelines; Technical Report; WECC: Salt Lake City, UT, USA, 2014. [Google Scholar]
- Villena-Ruiz, R.; Honrubia-Escribano, A.; Fortmann, J.; Gómez-Lázaro, E. Field validation of a standard Type 3 wind turbine model implemented in DIgSILENT-PowerFactory following IEC 61400-27-1 guidelines. Int. J. Electr. Power Energy Syst. 2020, 116, 105553. [Google Scholar] [CrossRef]
- Lorenzo-Bonache, A.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Operation of active and reactive control systems of a generic Type 3 WT model. In Proceedings of the 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 606–610. [Google Scholar]
- Villena-Ruiz, R.; Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Jiménez-Buendía, F.; Gómez-Lázaro, E. Implementation of IEC 61400-27-1 Type 3 Model: Performance Analysis under Different Modeling Approaches. Energies 2019, 12, 2690. [Google Scholar] [CrossRef]
- Red Eléctrica de España. Norma TéCnica de Supervisión de la Conformidad de los MóDulos de Generación de Electricidad Según el Reglamento UE 2016/631; Technical Report; Red Eléctrica de España: Madrid, Spain, 2019. [Google Scholar]
- Ministerio de Industria, Comercio y Turismo. P.O. 12.3. Requisitos de Respuesta Frente a Huecos de Tensión de las Instalaciones Eólicas; Technical Report; Ministerio de Industria, Comercio y Turismo: Madrid, Spain, 2006.
- AEE. Procedimientos de Verificación, Validación y Certificación de los Requisitos del PO 12.3 Sobre la Respuesta de las Instalaciones Eólicas y Fotovoltaicas ante Huecos de Tensión (in Spanish), 11th ed.; Asociación Empresarial Eólica: Madrid, Spain, 2012. [Google Scholar]
- Villena-Ruiz, R.; Jiménez-Buendía, F.; Honrubia-Escribano, A.; Molina-García, Á.; Gómez-Lázaro, E. Compliance of a Generic Type 3 WT Model with the Spanish Grid Code. Energies 2019, 12, 1631. [Google Scholar] [CrossRef]
- Jiménez, F.; Gómez-Lázaro, E.; Fuentes, J.A.; Molina-García, A.; Vigueras-Rodríguez, A. Validation of a double fed induction generator wind turbine model and wind farm verification following the Spanish grid code. Wind Energy 2012, 15, 645–659. [Google Scholar] [CrossRef]
- Jiménez, F.; Gómez-Lázaro, E.; Fuentes, J.A.; Molina-García, A.; Vigueras-Rodríguez, A. Validation of a DFIG wind turbine model submitted to two-phase voltage dips following the Spanish grid code. Renew. Energy 2013, 57, 27–34. [Google Scholar] [CrossRef]
- Jiménez-Buendía, F.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Molina-García, Á.; Gómez-Lázaro, E. Submission of a WECC DFIG wind turbine model to Spanish operation procedure 12.3. Energies 2019, 12, 3749. [Google Scholar] [CrossRef]
- Steinhaeuser, L.; Coumont, M.; Weck, S.; Hanson, J. Comparison of RMS and EMT Models of Converter-Interfaced Distributed Generation Units Regarding Analysis of Short-Term Voltage Stability. In Proceedings of the NEIS 2019, Conference on Sustainable Energy Supply and Energy Storage Systems, Hamburg, Deutschland, 19–20 September 2019; pp. 1–6. [Google Scholar]
- Honrubia-Escribano, A.; Gómez-Lázaro, E.; Fortmann, J.; Sørensen, P.; Martín-Martínez, S. Generic dynamic wind turbine models for power system stability analysis: A comprehensive review. Renew. Sustain. Energy Rev. 2018, 81, 1939–1952. [Google Scholar] [CrossRef]
- IEC 61400-27-2 Ed. 1. Wind Energy Generation Systems—Part 27-2: Electrical Simulation Models—Model Validation; International Electrotechnical Commission: Geneva, Switzerland, 2020.
- FGW, e.V. TG 4—Demands on Modelling and Validating Simulation Models of the Electrical Characteristics of Power Generating Units and Systems, Storage Systems as Well as their Components; Technical Report; Fördergesellschaft Windenergie und andere Dezentrale Energien (FGW e.V.): Berlin, Germany, 2019. [Google Scholar]
- FGW, e.V. TG 3—Determination of the Electrical Characteristics of Power Generating Units in Medium-, High- and Extra-High Voltage Grids; Technical Report; Fördergesellschaft Windenergie und andere Dezentrale Energien (FGW e.V.): Berlin, Germany, 2019. [Google Scholar]
- FGW, e.V. TG 8—Certification of the Electrical Characteristics of Power Generating Units, Systems and Storage Systems as well as their Components on the Grid; Technical Report; Fördergesellschaft Windenergie und andere Dezentrale Energien (FGW e.V.): Berlin, Germany, 2019. [Google Scholar]
- NERSA. Grid Connection Code for Renewable Power Plants (RPPs) Connected to the Electricity Transmission System (TS) or the Distribution System (DS) in South Africa; Technical Report; National Energy Regulator of South Africa (NERSA): Pretoria, South Africa, 2019. [Google Scholar]
- Nobela, O.N.; Bansal, R.C.; Justo, J.J. A review of power quality compatibility of wind energy conversion systems with the South African utility grid. Renew. Energy Focus 2019, 31, 63–72. [Google Scholar] [CrossRef]
- Nhlapo, B.; Awodele, K. Review and comparison of the South African grid code requirements for wind generation with the European countries’ grid codes. In Proceedings of the 2020 International SAUPEC/RobMech/PRASA Conference, Cape Town, South Africa, 29–31 January 2020; pp. 1–6. [Google Scholar]
- Asmine, M.; Brochu, J.; Fortmann, J.; Gagnon, R.; Kazachkov, Y.; Langlois, C.E.; Larose, C.; Muljadi, E.; MacDowell, J.; Pourbeik, P.; et al. Model validation for wind turbine generator models. IEEE Trans. Power Syst. 2010, 26, 1769–1782. [Google Scholar] [CrossRef]
- Honrubia-Escribano, A.; Jiménez-Buendía, F.; Gómez-Lázaro, E.; Fortmann, J. Validation of generic models for variable speed operation wind turbines following the recent guidelines issued by IEC 61400-27. Energies 2016, 9, 1048. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Window | Active Power | Reactive Power | Active Current | Reactive Current | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MXE | ME | MAE | MXE | ME | MAE | MXE | ME | MAE | MXE | ME | MAE | ||
| Threshold (pu) | Pre-fault | 0.150 | ±0.100 | 0.120 | 0.150 | ±0.100 | 0.120 | 0.150 | ±0.100 | 0.120 | 0.150 | ±0.100 | 0.120 |
| Fault | 0.170 | ±0.150 | 0.170 | 0.170 | ±0.150 | 0.170 | 0.500 | ±0.300 | 0.400 | 0.170 | ±0.150 | 0.170 | |
| Post-fault | 0.170 | ±0.150 | 0.170 | 0.170 | ±0.150 | 0.170 | 0.170 | ±0.150 | 0.170 | 0.170 | ±0.150 | 0.170 | |
| Variable to Validate | Phases | Average Absolute Error of Sample-by-Sample Evaluation | Error Band in Sample-by-Sample Evaluation | Average Error of One Cycle RMS Values |
|---|---|---|---|---|
| Voltage | A, B, C | ≤5% | ≤±10% | - |
| Current | A, B, C | ≤15% | ≤±20% | ≤15% |
| Load Conditions | Magnitude | Max. Deviation (pu) | Mandatory Points below 0.1 pu (%) | Points below 0.1 pu (%) | Compliance |
|---|---|---|---|---|---|
| Full load | Active Power, P | 0.10 | 85 | 89 | ✓ |
| Reactive Power, Q | 0.10 | 85 | 92 | ✓ | |
| Partial load | Active Power, P | 0.10 | 85 | 99 | ✓ |
| Reactive Power, Q | 0.10 | 85 | 99 | ✓ |
| Active Power, P | Reactive Power, Q | |||||
|---|---|---|---|---|---|---|
| Thresholds | Model Validation Results | Compliance | Thresholds | Model Validation Results | Compliance | |
| (pu) | (pu) | (pu) | (pu) | |||
| ±0.150 | 0.0048 | ✓ | ±0.150 | 0.0054 | ✓ | |
| 0.170 | 0.0250 | ✓ | 0.170 | 0.0069 | ✓ | |
| 0.170 | 0.0698 | ✓ | 0.170 | 0.0231 | ✓ | |
| ±0.150 | 0.0138 | ✓ | ±0.150 | 0.0052 | ✓ | |
| 0.170 | 0.0235 | ✓ | 0.170 | 0.0144 | ✓ | |
| 0.170 | 0.0600 | ✓ | 0.170 | 0.0471 | ✓ | |
| Active Power, P | Reactive Power, Q | |||||
|---|---|---|---|---|---|---|
| Thresholds | Model validation results | Compliance | Thresholds | Model validation results | Compliance | |
| (pu) | (pu) | (pu) | (pu) | |||
| ±0.150 | −0.0051 | ✓ | ±0.150 | 0.0000 | ✓ | |
| 0.170 | 0.0077 | ✓ | 0.170 | 0.0065 | ✓ | |
| 0.170 | 0.0162 | ✓ | 0.170 | 0.0460 | ✓ | |
| ±0.150 | 0.0153 | ✓ | ±0.150 | 0.0131 | ✓ | |
| 0.170 | 0.0220 | ✓ | 0.170 | 0.0207 | ✓ | |
| 0.170 | 0.0175 | ✓ | 0.170 | 0.0122 | ✓ | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villena-Ruiz, R.; Honrubia-Escribano, A.; Jiménez-Buendía, F.; Molina-García, Á.; Gómez-Lázaro, E. Requirements for Validation of Dynamic Wind Turbine Models: An International Grid Code Review. Electronics 2020, 9, 1707. https://doi.org/10.3390/electronics9101707
Villena-Ruiz R, Honrubia-Escribano A, Jiménez-Buendía F, Molina-García Á, Gómez-Lázaro E. Requirements for Validation of Dynamic Wind Turbine Models: An International Grid Code Review. Electronics. 2020; 9(10):1707. https://doi.org/10.3390/electronics9101707
Chicago/Turabian StyleVillena-Ruiz, Raquel, Andrés Honrubia-Escribano, Francisco Jiménez-Buendía, Ángel Molina-García, and Emilio Gómez-Lázaro. 2020. "Requirements for Validation of Dynamic Wind Turbine Models: An International Grid Code Review" Electronics 9, no. 10: 1707. https://doi.org/10.3390/electronics9101707
APA StyleVillena-Ruiz, R., Honrubia-Escribano, A., Jiménez-Buendía, F., Molina-García, Á., & Gómez-Lázaro, E. (2020). Requirements for Validation of Dynamic Wind Turbine Models: An International Grid Code Review. Electronics, 9(10), 1707. https://doi.org/10.3390/electronics9101707