An Adaptive Current Limiting Controller for a Wireless Power Transmission System Energized by a PV Generator




Abstract
1. Introduction
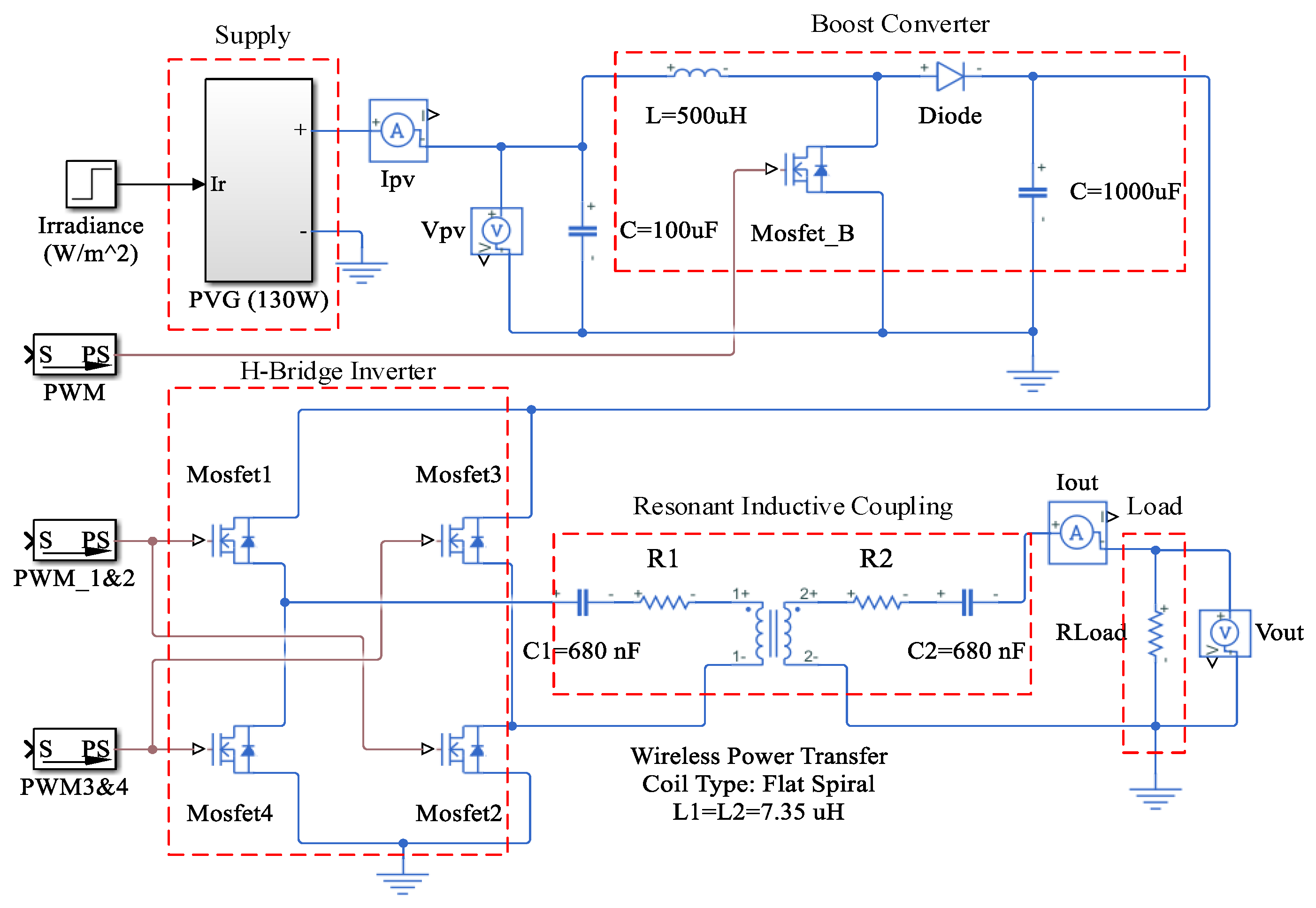
2. Prototype Design of a WPTS
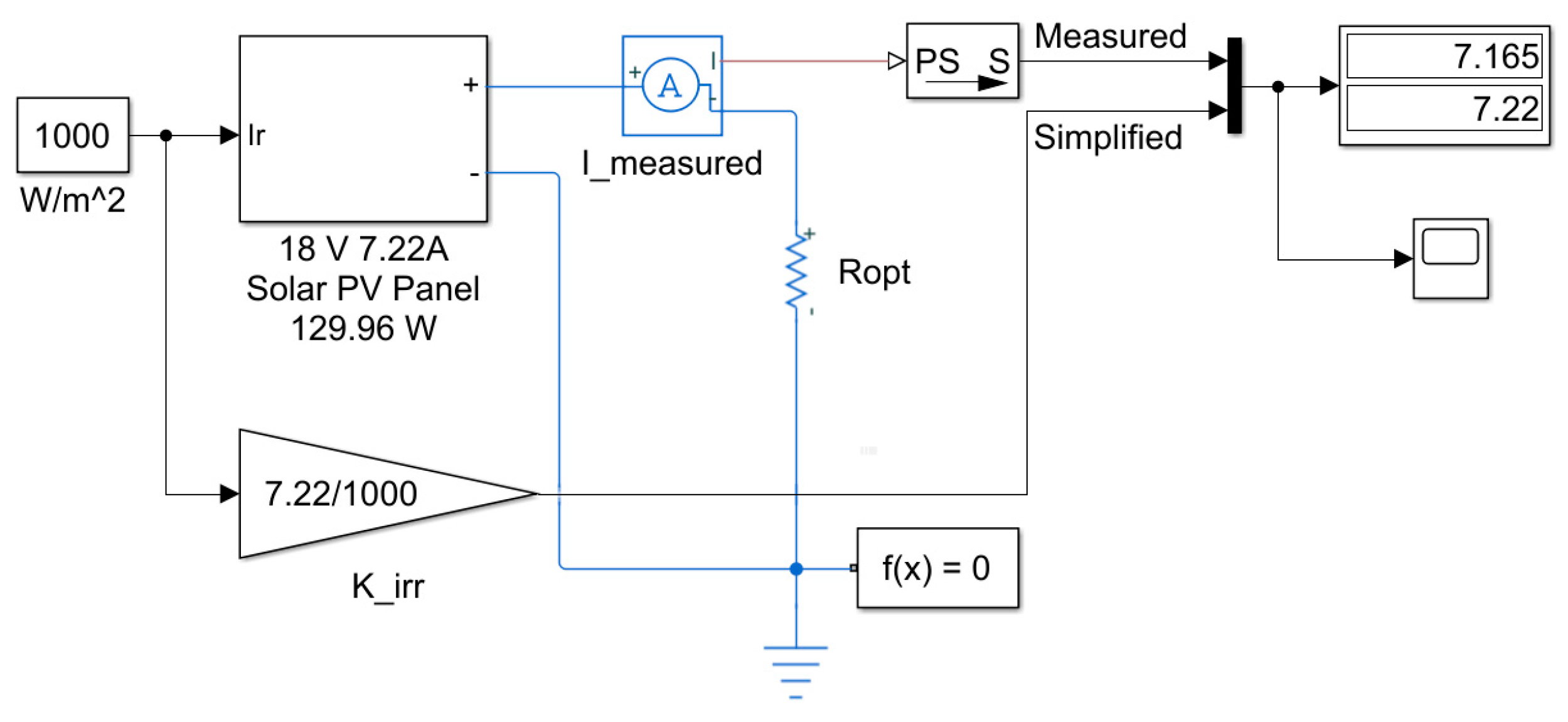
2.1. Modelling of the PVG
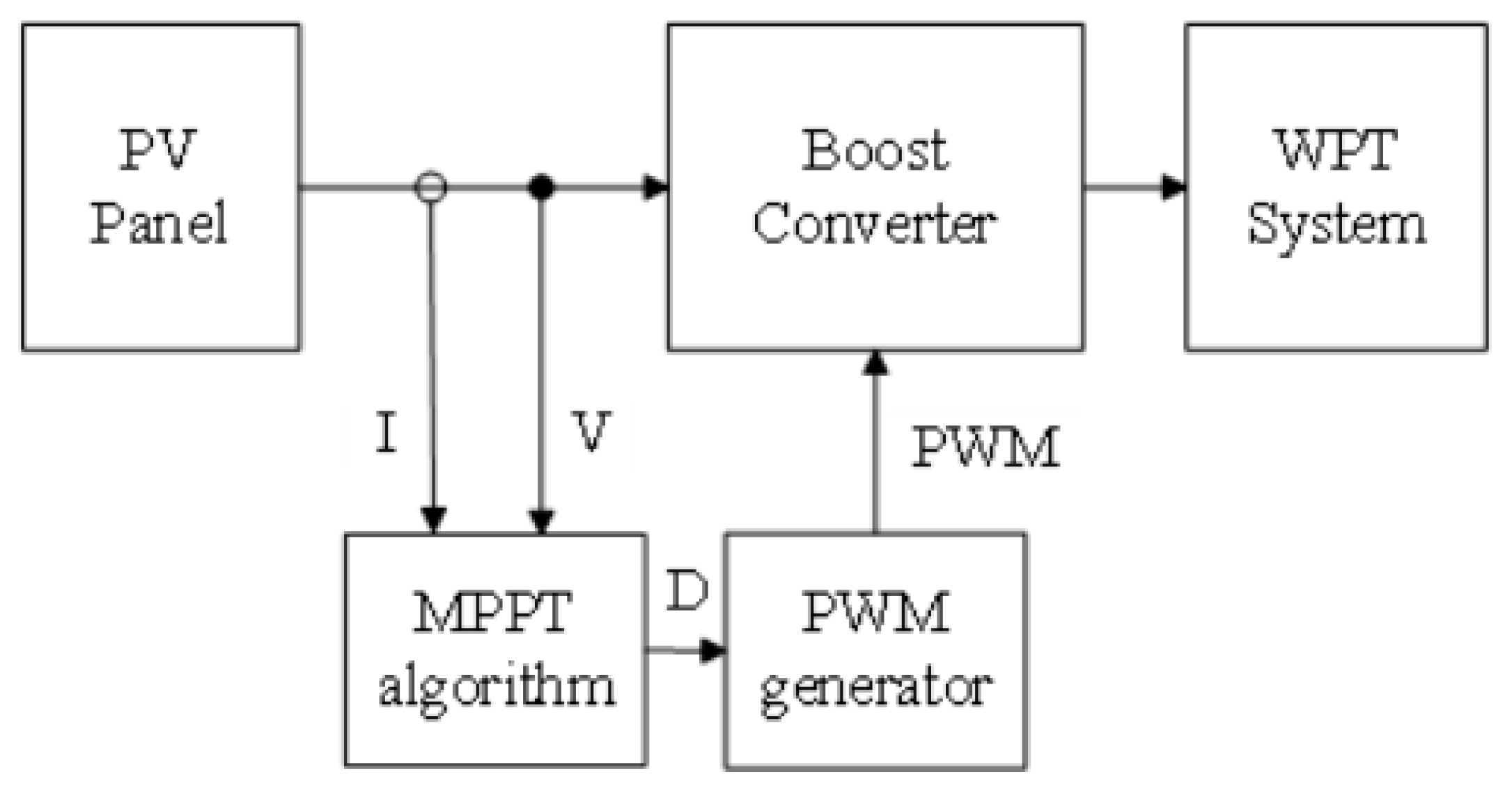
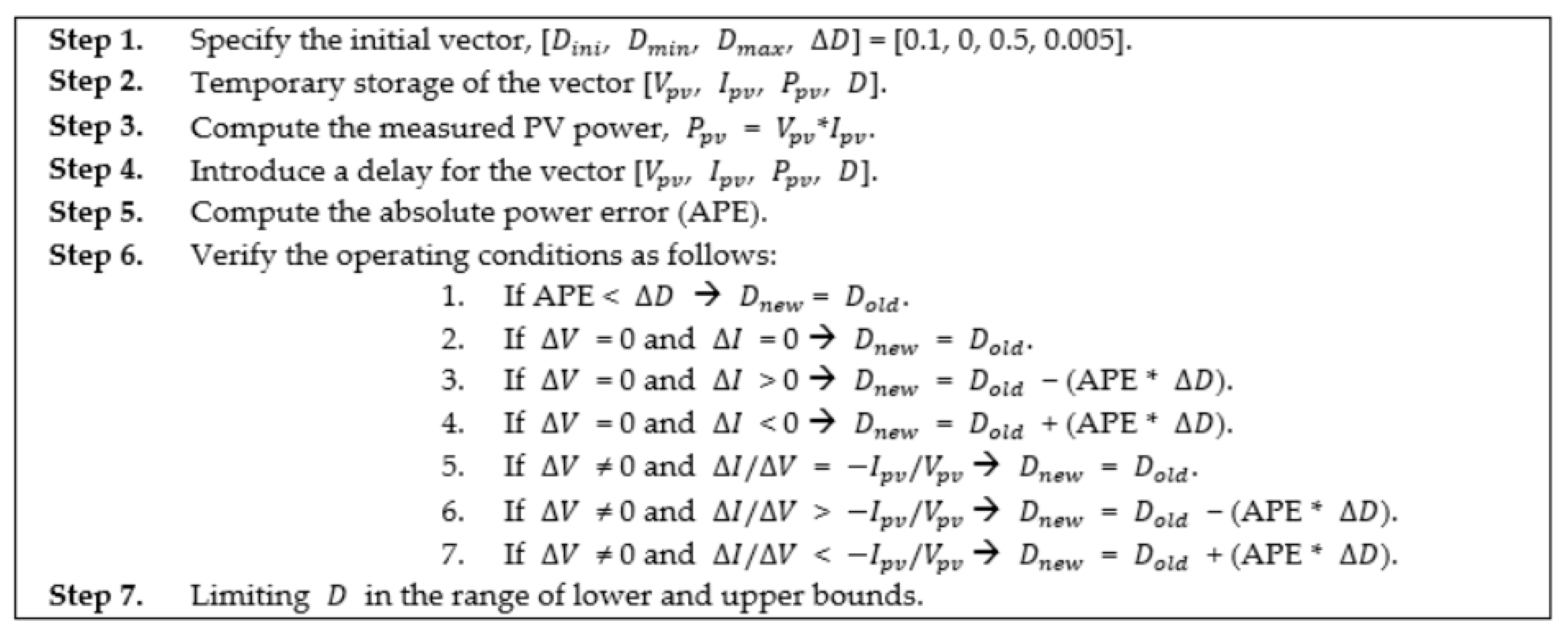
2.2. MPPT Scheme
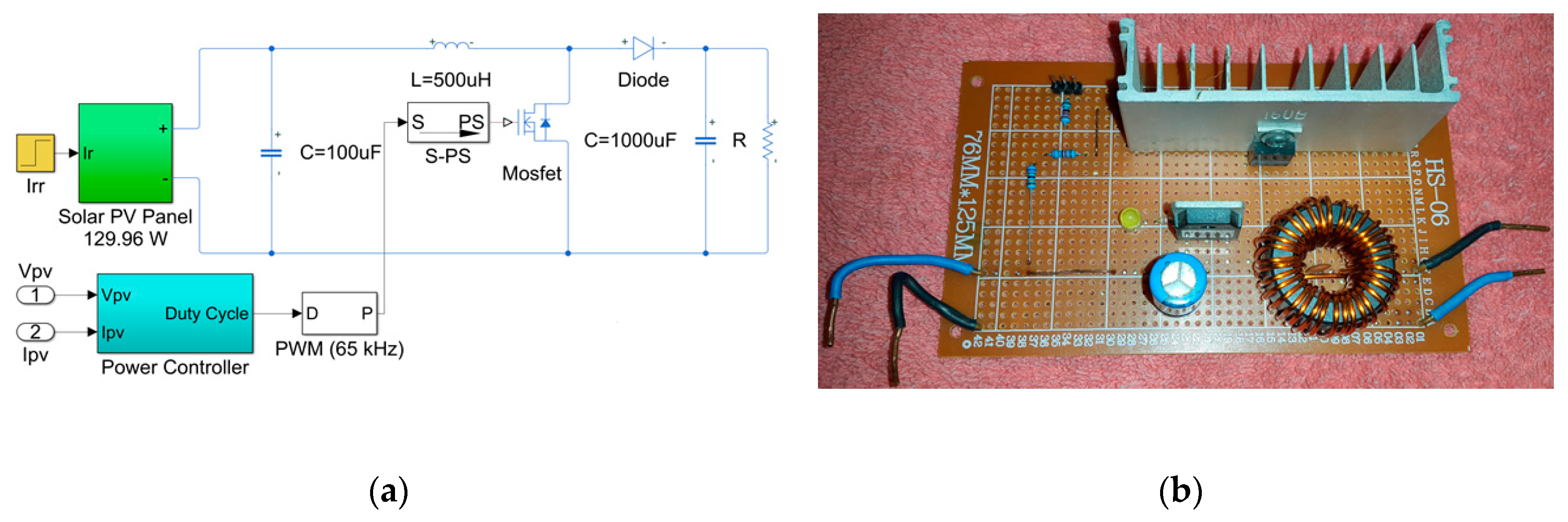
2.3. Design of a Boost Converter
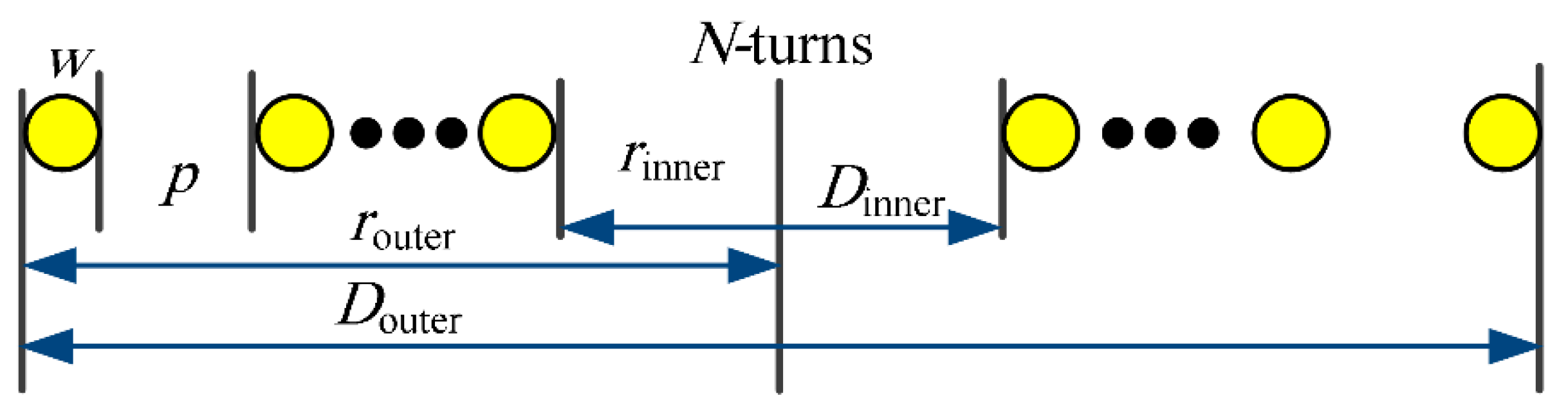
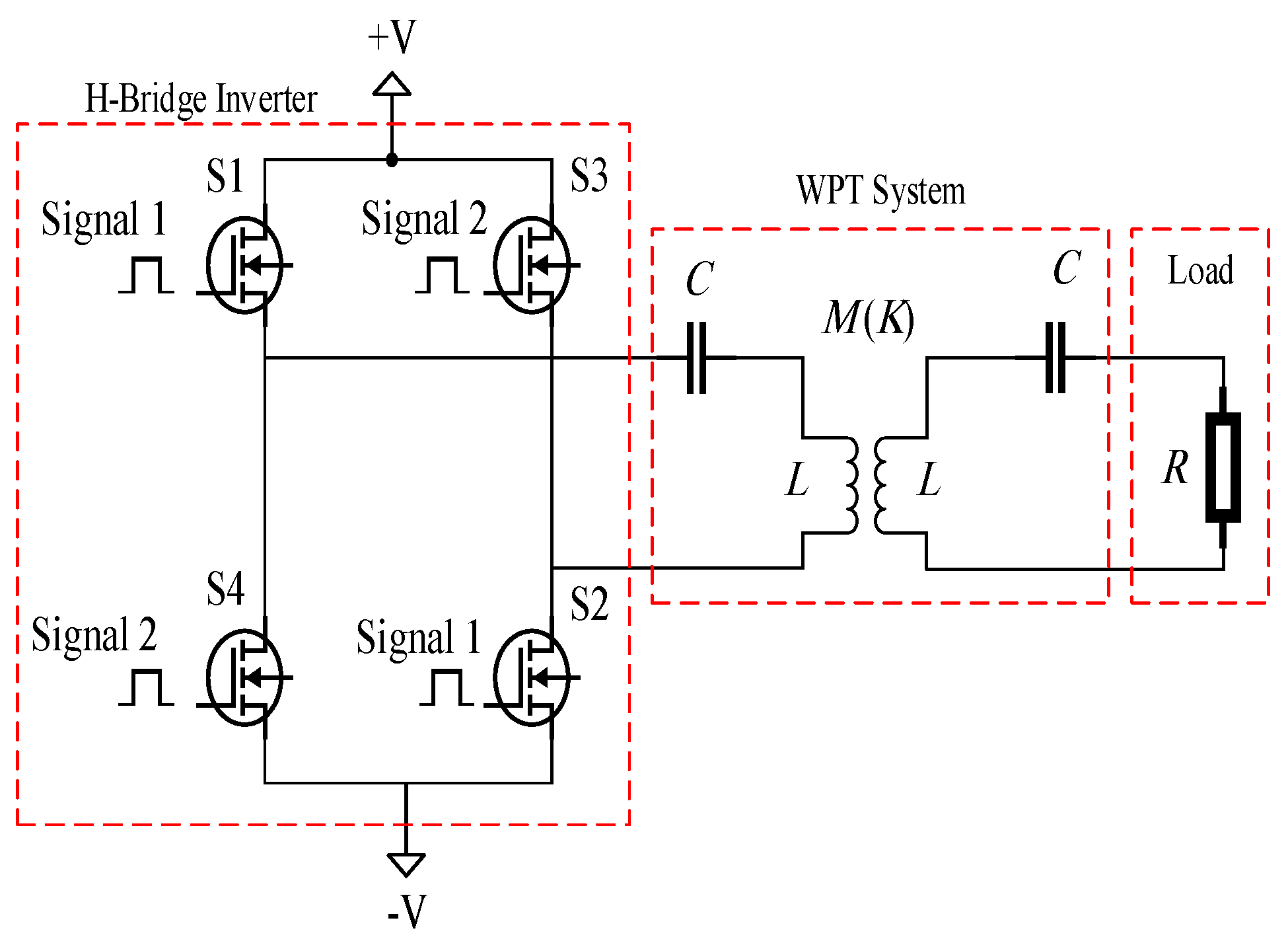
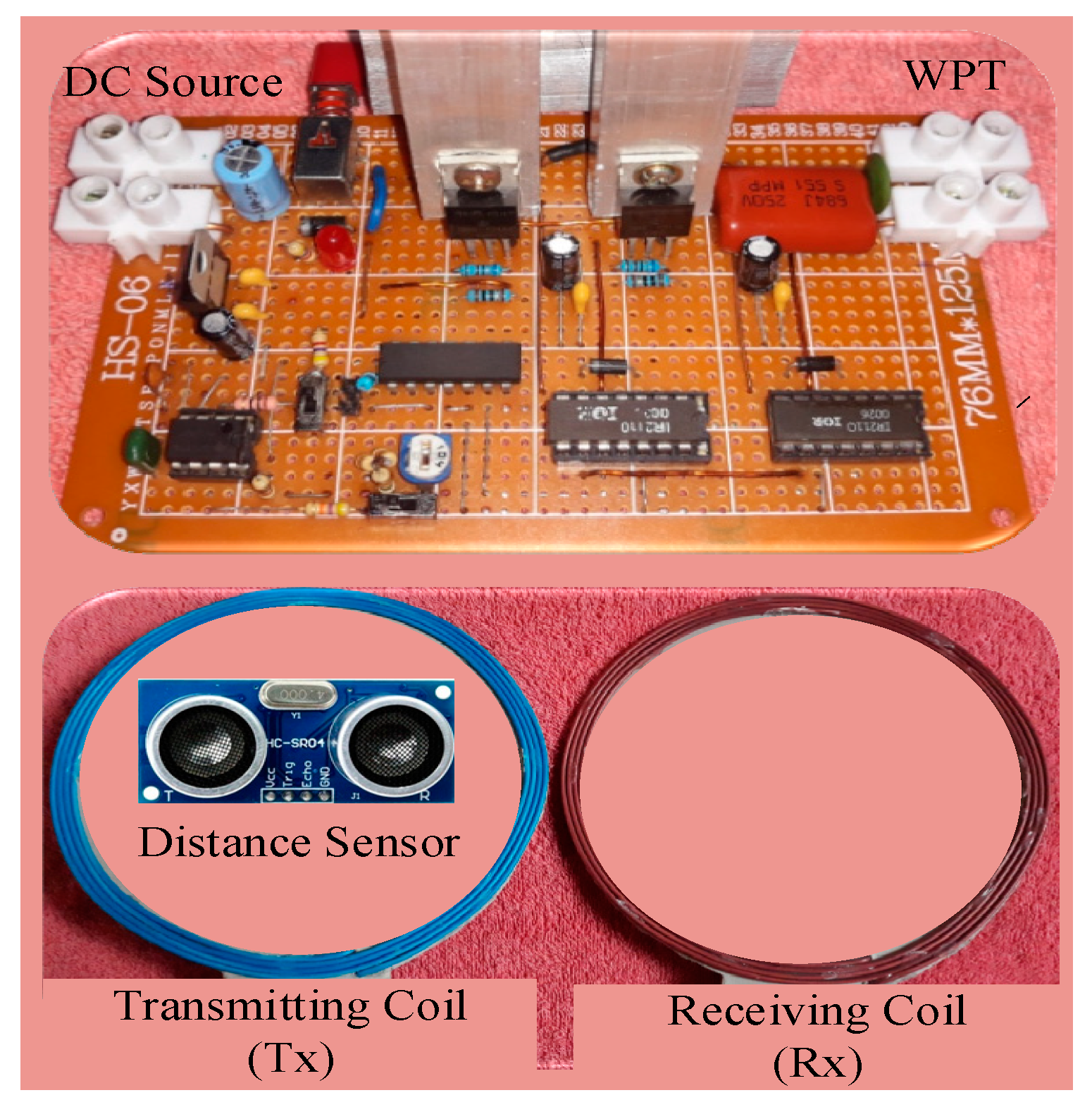
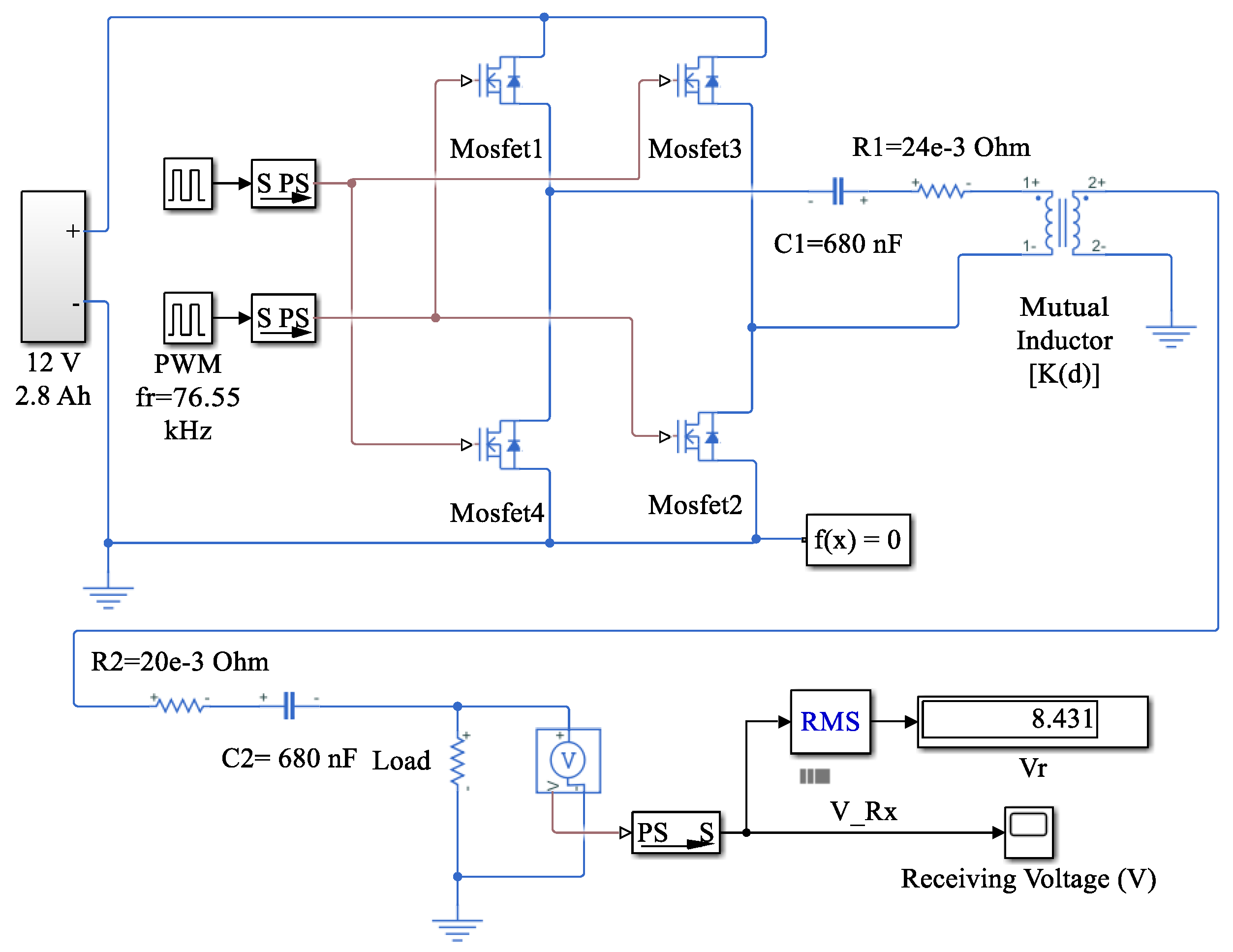
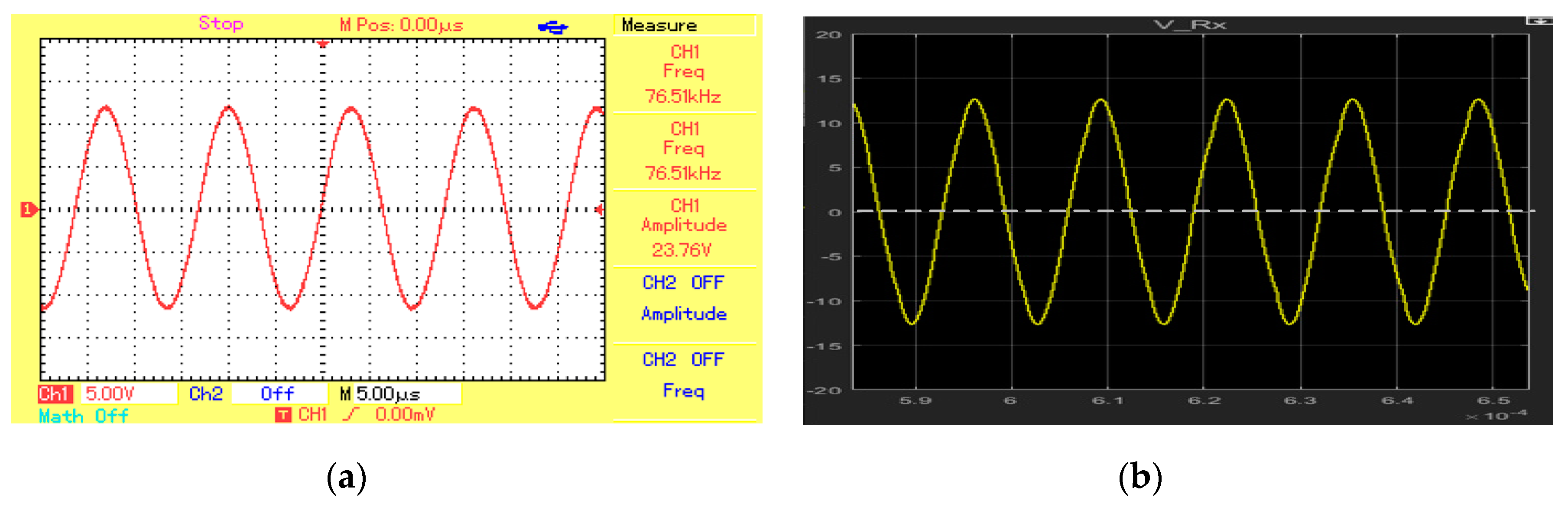
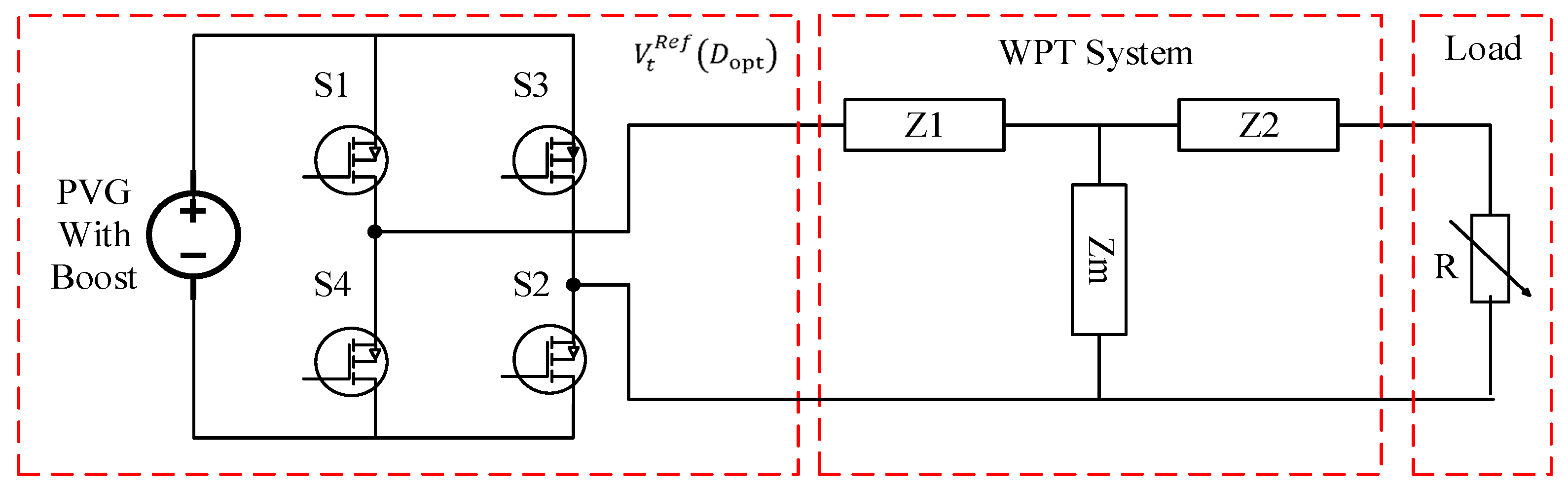
2.4. Designing WPTS Circuits
3. Coefficient of Coupling Estimator and Adaptive Virtual Impedance Controller (AVIC)
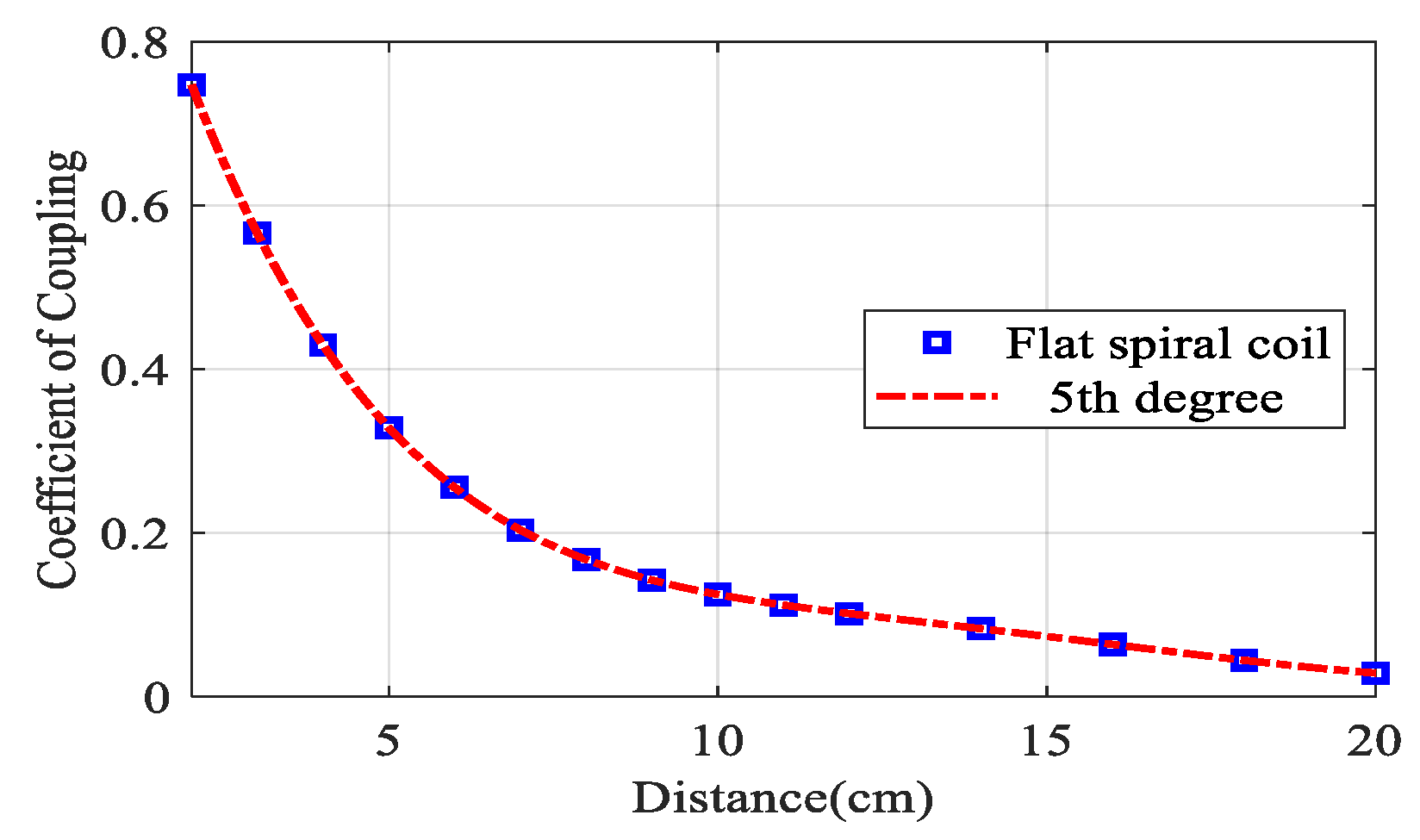
3.1. Coefficient of Coupling Estimator
3.2. Derivation of Adaptive Reference Values
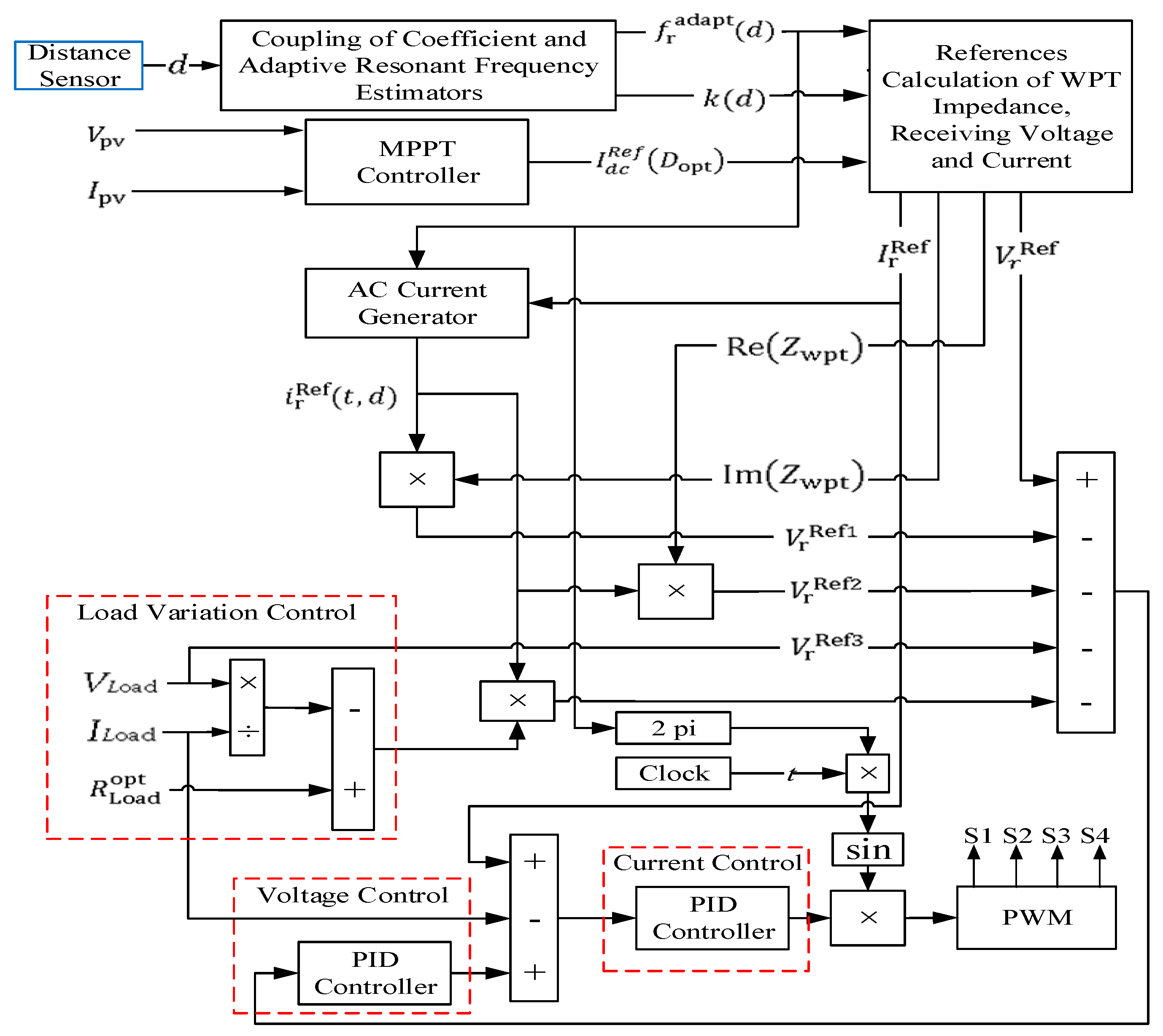
3.3. Description of the Proposed Controller
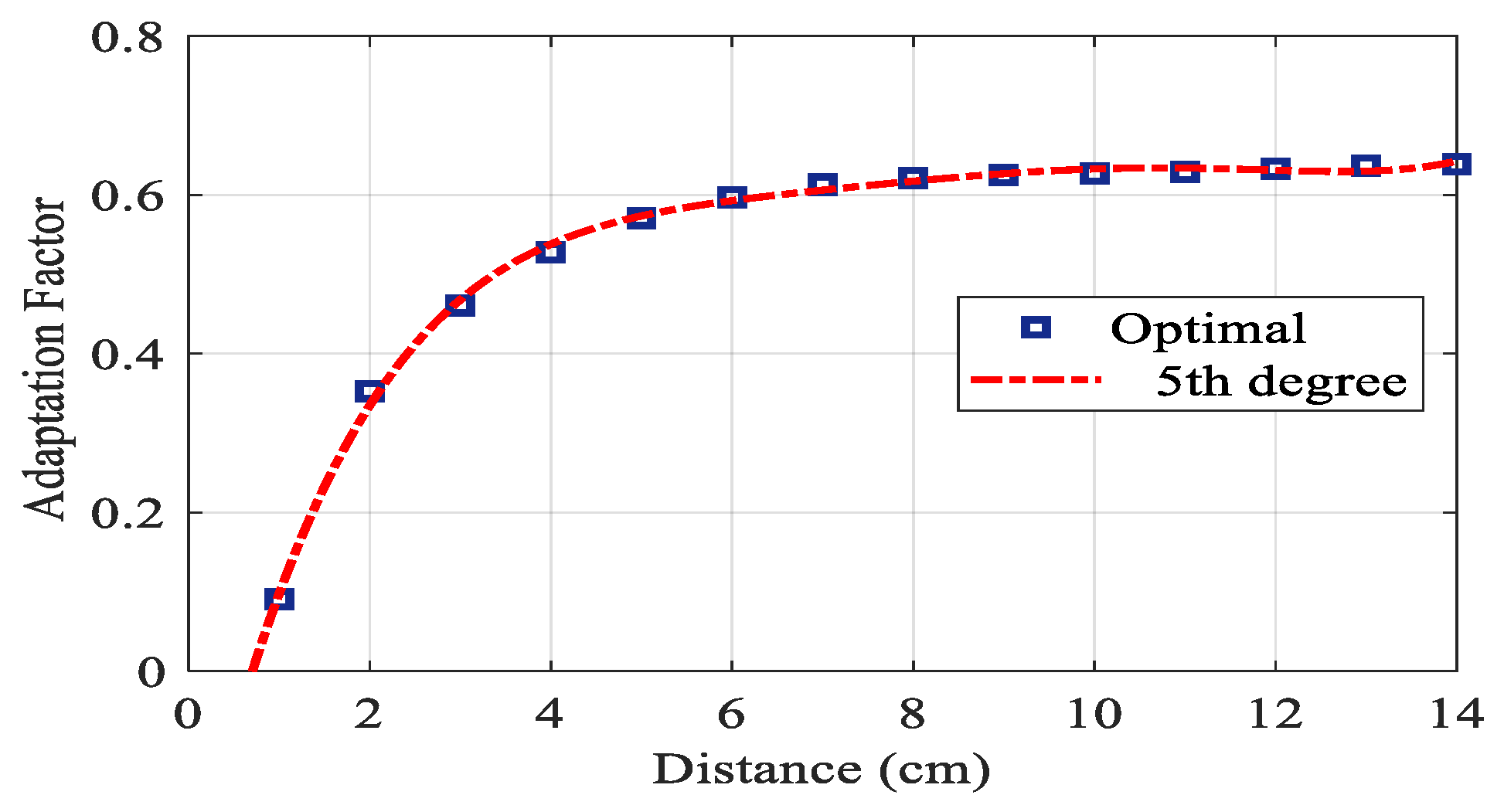
- Coupling Coefficient and Adaptive Resonant Frequency Estimators: The purpose of these estimators is to obtain optimal values of the coupling coefficient and the resonant frequency under the variation of the distance between Tx and Rx. The new Equations (11) and (24) are used to estimate the optimal control signals, i.e., K(d) and fr(d), by measuring the distance.
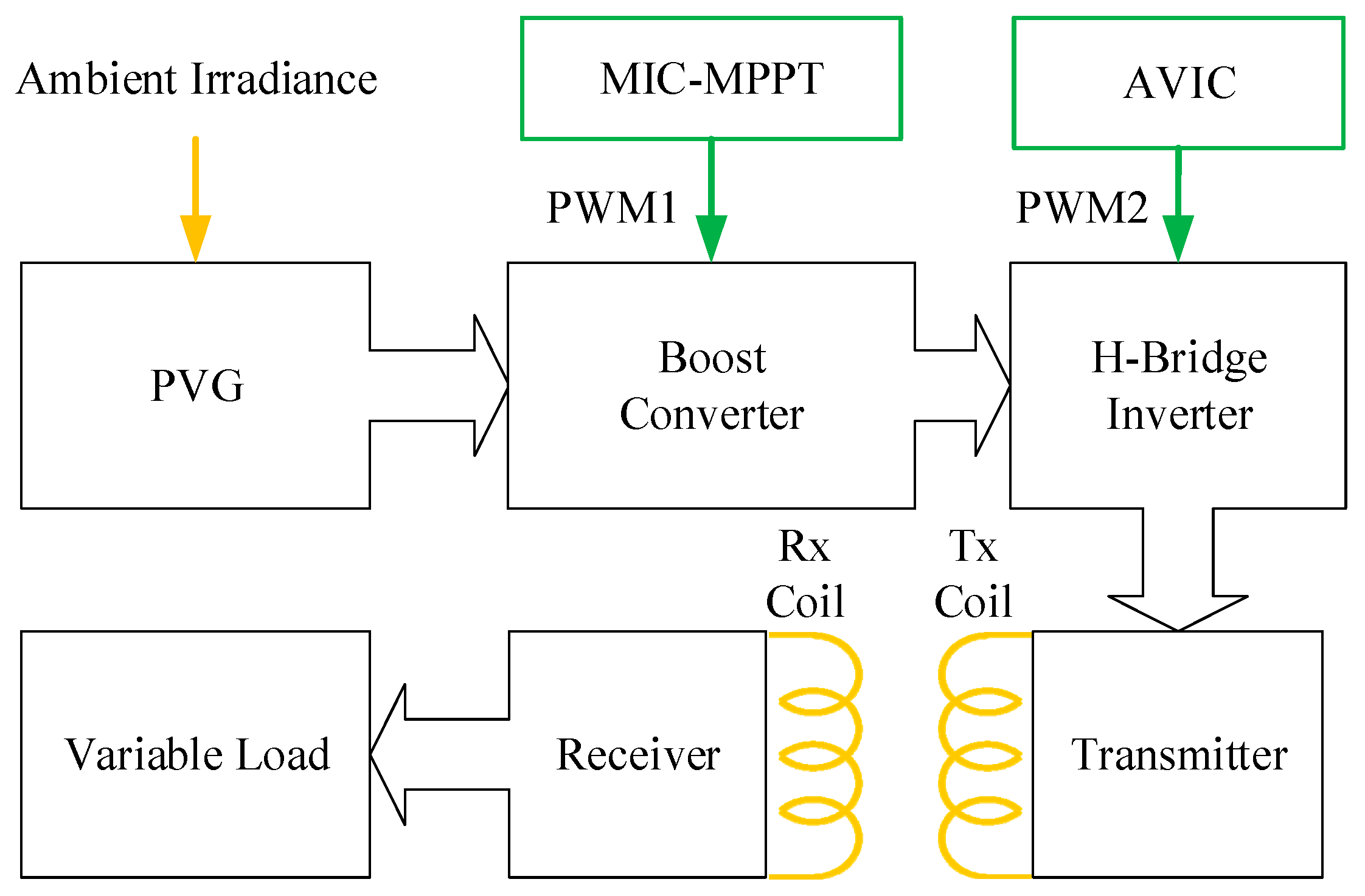
- MPPT Controller: As mentioned previously, the purpose of this controller is to generate the optimal duty cycles that ensure maximum power transfer from the PVG to the DC-link of the inverter.
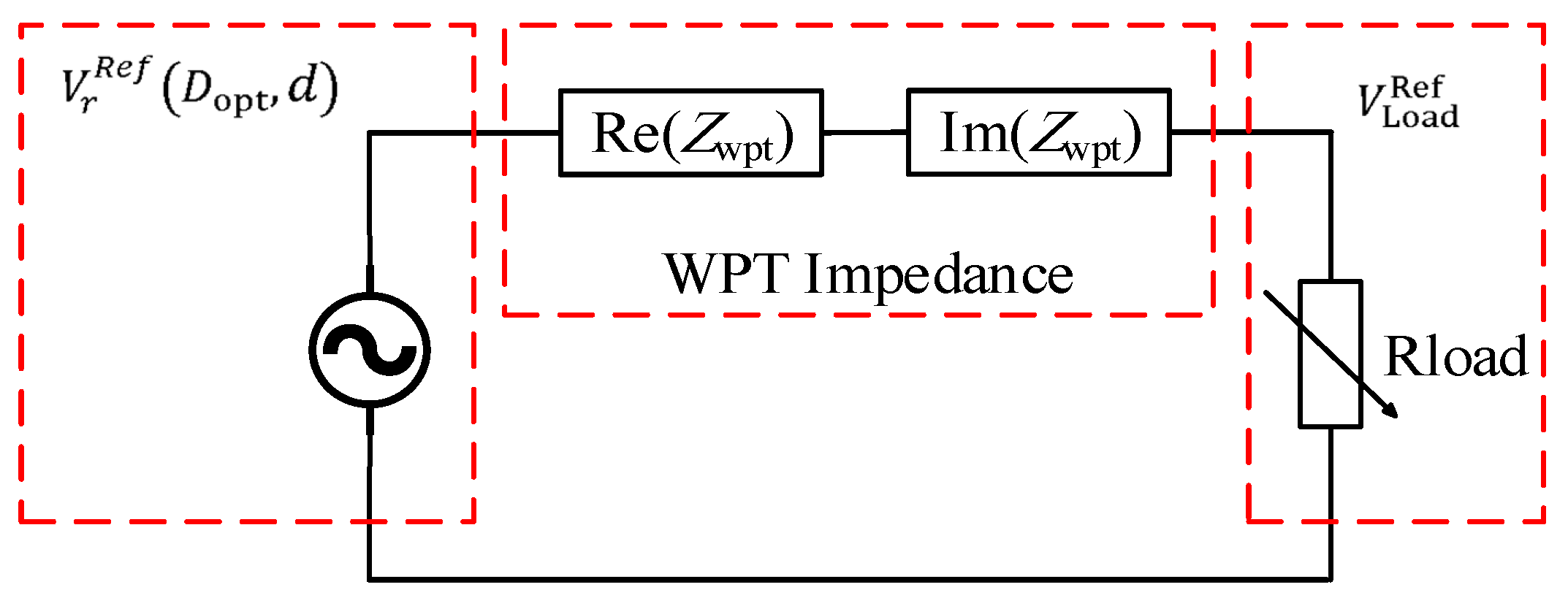
- Reference Calculation of WPT Impedance, Load Voltage, and Load Current: The reference values of the virtual impedance controller, i.e., virtual resistance, virtual inductance, load voltage, and load current, are estimated using Equations (17), (18), (20), and (25), respectively. Optimal tuning of the WPTS impedance over time is essential when the distance between Tx and Rx coils varies. As mentioned in the literature review, in [13] and [15] the efficiency of the WPTS can be improved by changing the size of inductor and capacitor. This method may add extra weight and cost to the system. In the proposed method, the real and imaginary parts of the equivalent WPTS impedance are computed and multiplied by the reference time-varying receiving end current. The resonant frequency is adaptively changed to improve the receiving end voltage.
- AC Current Generator: This unit is used to generate the time-domain load current according to the following expression:
4. Simulation and Experimental Results
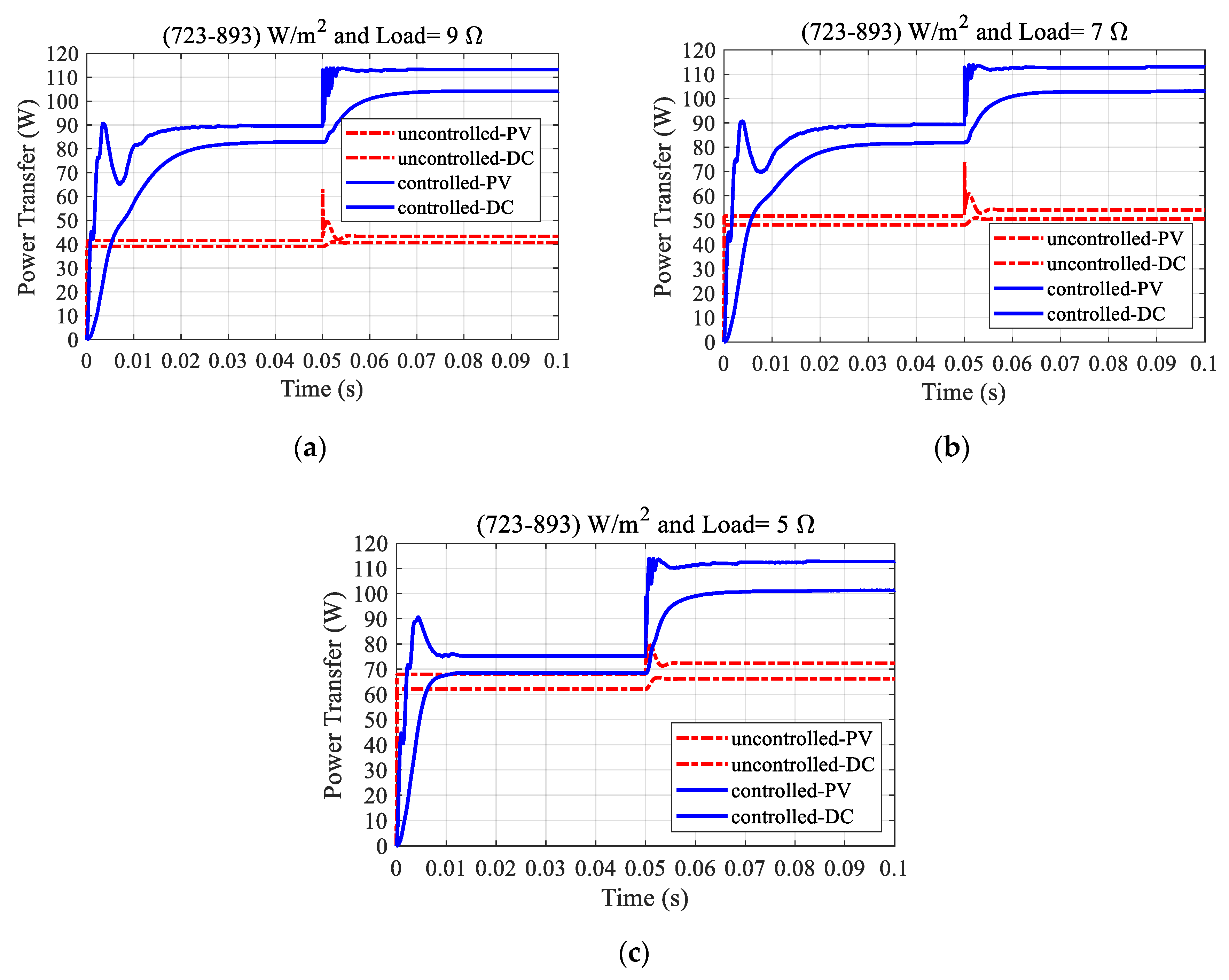
4.1. Scenario One: Experimental Tests for Verifying the MPPT Algorithm
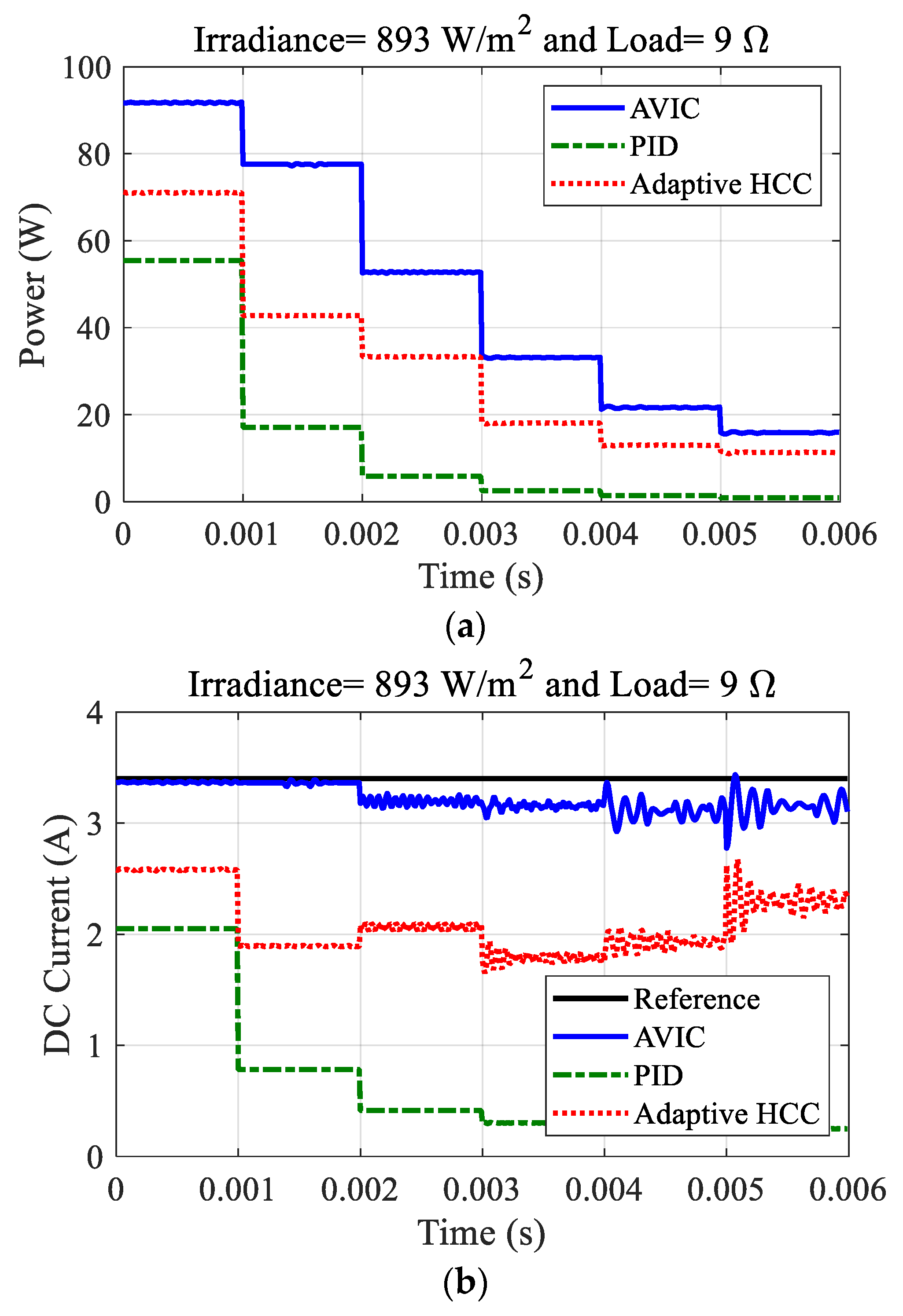
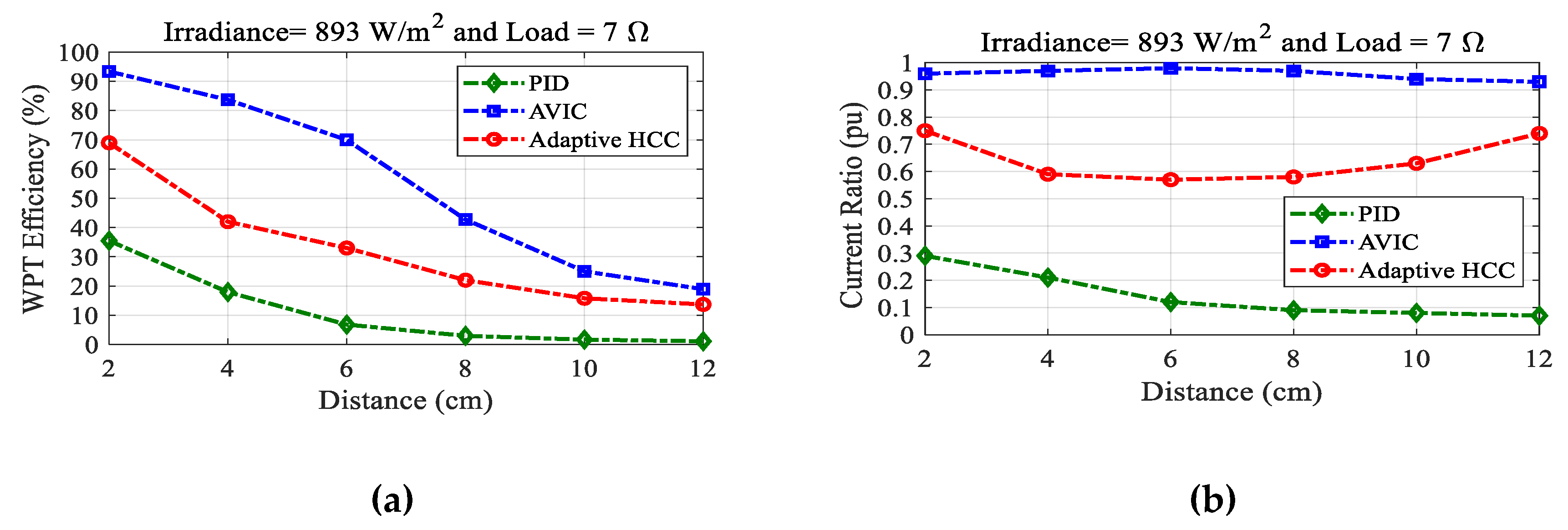
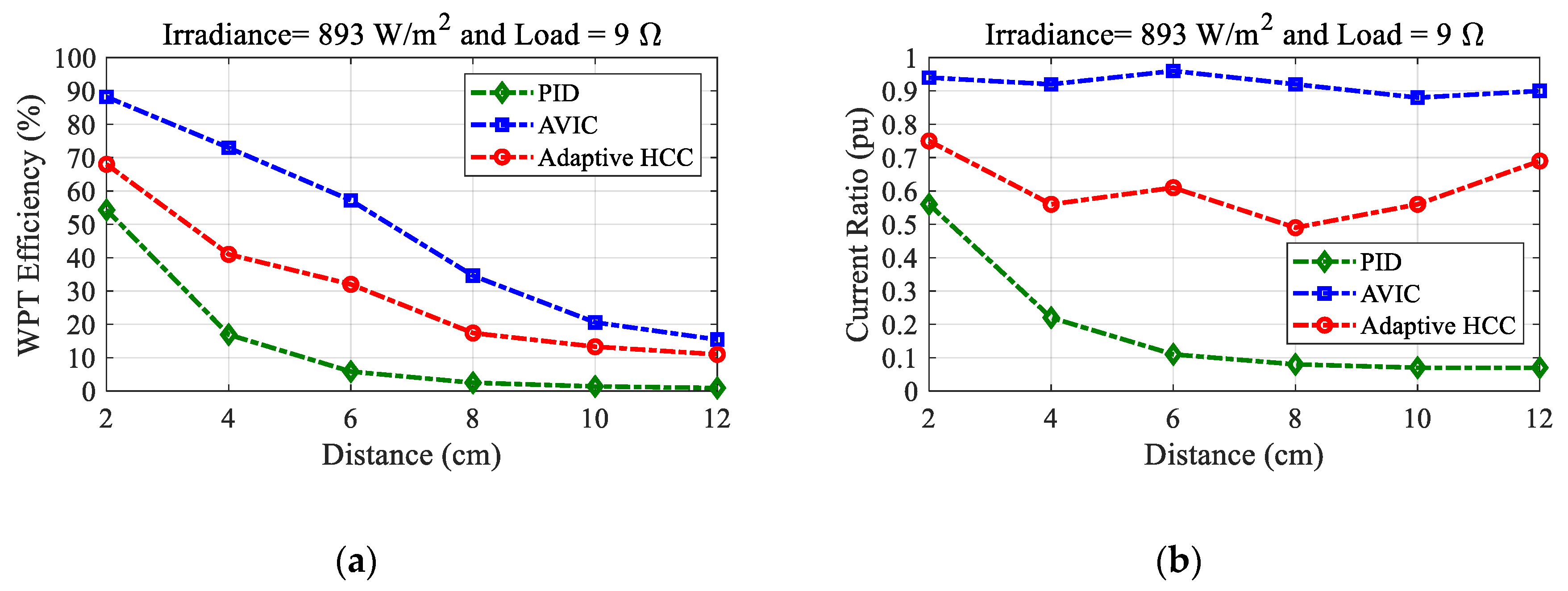
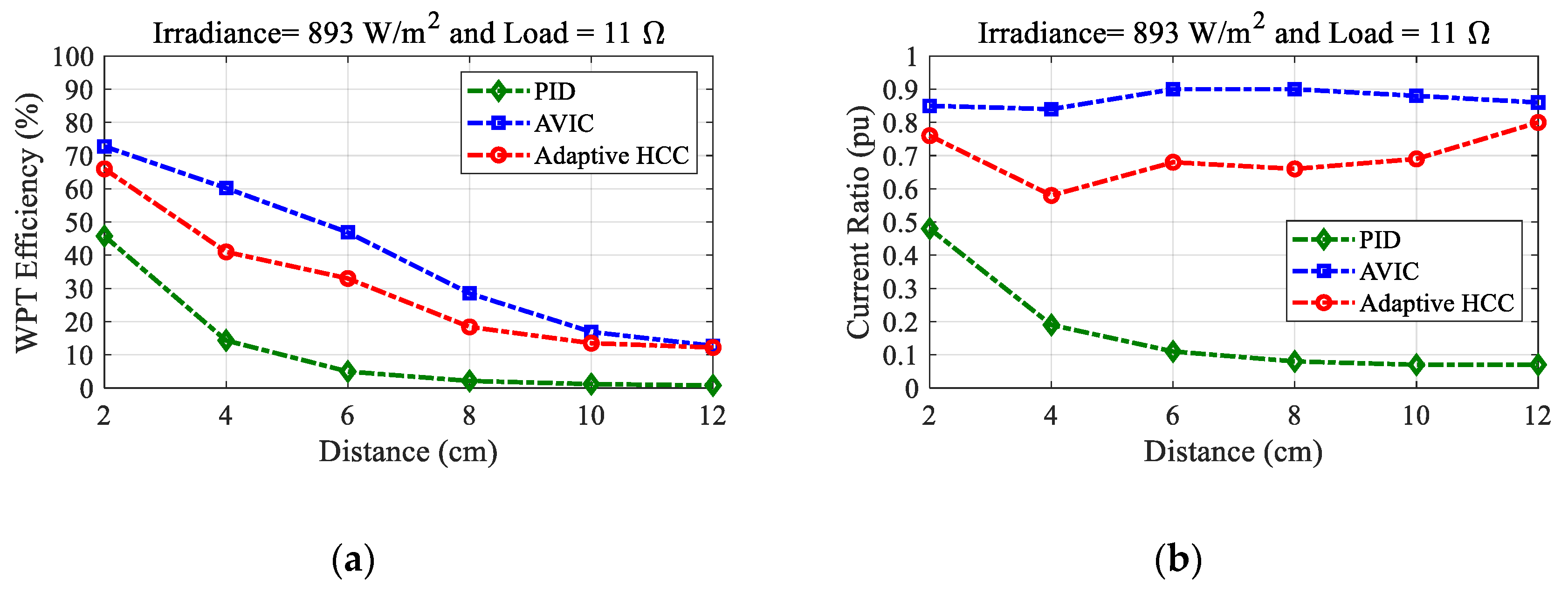
4.2. Scenario Two: Validating the Superiority of the Proposed AVIC Adaptive Frequency Controller
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fahad, S.; Goudarzi, A.; Xiang, J. Demand Management of Active Distribution Network using Coordination of Virtual Synchronous Generators. IEEE Trans. Sustain. Energy 2020. [Google Scholar] [CrossRef]
- Brown, W.C. The history of power transmission by radio waves. IEEE Trans. Microw. Theory Tech. 1984, 32, 1230–1242. [Google Scholar] [CrossRef]
- Liu, X.; Han, W.; Liu, C.; Pong, P.W.T. Marker-Free Coil-Misalignment Detection Approach Using TMR Sensor Array for Dynamic Wireless Charging of Electric Vehicles. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar]
- ICNIRP. Gaps in Knowledge Relevant to the Guidelines for Limiting Exposure to Time-Varying Electric and Magnetic Fields (1 Hz–100 kHz) 2010. Health Phys. 2020, 118, 533–542. [Google Scholar] [CrossRef]
- Ibrahim, F.N.; Jamail, N.A.M.; Othman, N.A. Development of wireless electricity transmission through resonant coupling. In Proceedings of the 4th IET Clean Energy and Technology Conference (CEAT 2016), Kuala Lumpur, Malaysia, 14–15 November 2016. [Google Scholar]
- Rohith, T.; Samhitha, V.S.; Mamatha, I. Wireless transmission of solar power using inductive resonant principle. In Proceedings of the 2016 Biennial International Conference on Power and Energy Systems: Towards Sustainable Energy (PESTSE), Bangalore, India, 21–23 January 2016; pp. 1–6. [Google Scholar]
- Summerer, L.; Purcell, O. Concepts for Wireless Energy Transmission via Laser; Europeans Space Agency (ESA)-Advanced Concepts Team: Paris, France, 2009. [Google Scholar]
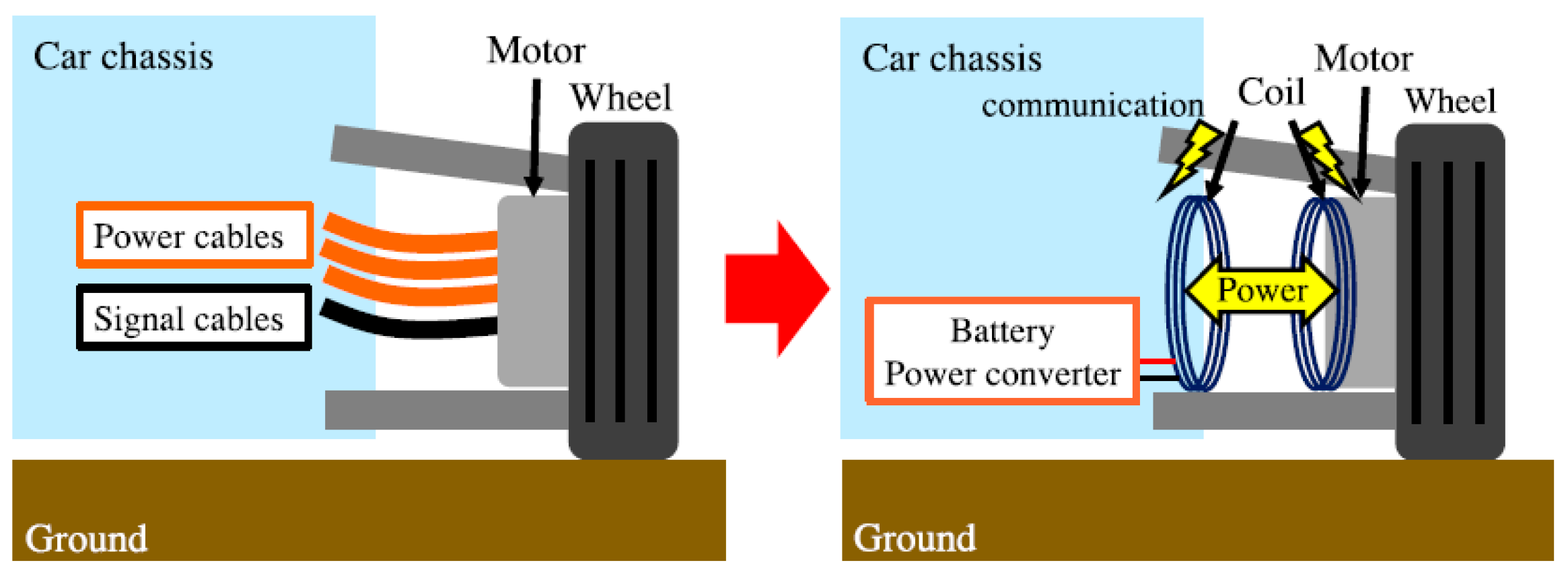
- Sato, M.; Yamamoto, G.; Gunji, D.; Imura, T.; Fujimoto, H. Development of Wireless In-Wheel Motor Using Magnetic Resonance Coupling. IEEE Trans. Power Electron. 2016, 31, 5270–5278. [Google Scholar] [CrossRef]
- Huang, Z.; Iam, I.W.; Hoi, I.U.; Lam, C.; Mak, P.; Martins, R.P. Self-Contained Solar-Powered Inductive Power Transfer System for Wireless Electric Vehicle Charging. In Proceedings of the 2019 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Macao, China, 1–4 December 2019; pp. 1–6. [Google Scholar]
- Kaushik, B.P.; Reddy, I.T.; Svama, S.; KirthikaDevi, V.S. Wireless Power Transmission Incorporating Solar Energy as Source for Motoring Applications. In Proceedings of the 2018 International Conference on Emerging Trends and Innovations in Engineering and Technological Research (ICETIETR), Ernakulam, India, 11–13 July 2018; pp. 1–5. [Google Scholar]
- Minnaert, B.; Ravyts, S.; Driesen, J.; Stevens, N. Challenges for Wireless Power Transfer in Building-Integrated Photovoltaics. In Proceedings of the 2018 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (Wow), Montréal, QC, Canada, 3–7 June 2018; pp. 1–5. [Google Scholar]
- Narayanamoorthi, R. Modeling of Capacitive Resonant Wireless Power and Data Transfer to Deep Biomedical Implants. IEEE Trans. Compon. Packag. Manuf. Technol. 2019, 9, 1253–1263. [Google Scholar] [CrossRef]
- Pevere, A.; Petrella, R.; Mi, C.C.; Shijie, Z. Design of a high efficiency 22 kW wireless power transfer system for EVs fast contactless charging stations. In Proceedings of the 2014 IEEE International Electric Vehicle Conference, Florence, Italy, 17–19 December 2014. [Google Scholar]
- Kan, T.; Nguyen, T.; White, J.C.; Malhan, R.K.; Mi, C.C. A New Integration Method for an Electric Vehicle Wireless Charging System Using LCC Compensation Topology: Analysis and Design. IEEE Trans. Power Electron. 2017, 32, 1638–1650. [Google Scholar] [CrossRef]
- Nguyen, M.Q.; Woods, P.; Hughes, Z.; Seo, Y.; Rao, S.; Chiao, J. A mutual inductance approach for optimization of wireless energy transmission. In Proceedings of the Texas Symposium on Wireless and Microwave Circuits and Systems, Waco, TX, USA, 3–4 April 2014; pp. 1–4. [Google Scholar]
- Carloni, A.; Baronti, F.; Di Rienzo, R.; Roncella, R.; Saletti, R. Effect of the DC-Link Capacitor Size on the Wireless Inductive-Coupled Opportunity-Charging of a Drone Battery. Energies 2020, 13, 2621. [Google Scholar] [CrossRef]
- Zambari, I.F.; Hui, C.Y.; Mohamed, R. Development of Wireless Energy Transfer Module for Solar Energy Harvesting. Procedia Technol. 2013, 11, 882–894. [Google Scholar] [CrossRef]
- Yi, K. Output Voltage Analysis of Inductive Wireless Power Transfer with Series LC and LLC Resonance Operations Depending on Coupling Condition. Electronics 2020, 9, 592. [Google Scholar] [CrossRef]
- Fu, M.; Yin, H.; Zhu, X.; Ma, C. Analysis and Tracking of Optimal Load in Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 3952–3963. [Google Scholar] [CrossRef]
- Zhong, W.; Hui, S.Y.R. Charging Time Control of Wireless Power Transfer Systems Without Using Mutual Coupling Information and Wireless Communication System. IEEE Trans. Ind. Electron. 2017, 64, 228–235. [Google Scholar] [CrossRef]
- Fahad, S.; Ullah, N.; Mahdi, A.J.; Ibeas, A.; Goudarzi, A. An Advanced Two-Stage Grid Connected PV System: A Fractional-Order Controller. Int. J. Renew. Energy Res. (IJRER) 2019, 9-1, 504–514. [Google Scholar]
- Krivchenkov, A.; Saltanovs, R. Increasing the Efficiency of the Wireless Charging System for Mobile Devices that Support Qi Standard. In Reliability and Statistics in Transportation and Communication; RelStat, Lecture Notes in Networks and Systems; Kabashkin, I., Yatskiv (Jackiva), I., Prentkovskis, O., Eds.; Springer: Cham, Switzerland, 2018; Volume 68. [Google Scholar]
- Fahad, S.; Mahdi, A.J.; Tang, W.H.; Huang, K.; Liu, Y. Particle Swarm Optimization Based DC-Link Voltage Control for Two Stage Grid Connected PV Inverter. In Proceedings of the 2018 International Conference on Power System Technology POWERCON, Guangzhou, China, 6–9 November 2018; pp. 2233–2241. [Google Scholar]
- Szlufcik, J.; Sivoththaman, S.; Nijs, J.; Mertens, R.; van Overstraeten, R. Low-cost industrial technologies of crystalline silicon solar cells. Proc. IEEE 1997, 85, 709–730. [Google Scholar] [CrossRef]
- Mostafa, M.R.; Saad, N.H.; El-sattar, A.A. Tracking the maximum power point of PV array by sliding mode control method. Ain Shams Eng. J. 2020, 11-1, 119–131. [Google Scholar] [CrossRef]
- Ned, M.; Tore, M.U.; William, P.R. Power Electronics; Converters and Design; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1995; pp. 178–184. [Google Scholar]
- Choudhury, T.R.; Nayak, B.; Santra, S.B. Investigation of voltage stress on a single switch boost-fly-back integrated high gain converter with light load condition. Ain Shams Eng. J. 2019, 10-1, 217–226. [Google Scholar] [CrossRef]
- Ang, S.S.; Alejandro, O. Power Switching Converters, 3rd ed.; CRC Press INC: Boca Raton, FL, USA, 2011. [Google Scholar]
- Maniktala, S. Switching Power Supplies A-Z, 2nd ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Rahman, S.; Ahmed, O.; Islam, M.S.; Awal, A.H.M.R.; Islam, M.S. Design and Construction of Wireless Power Transfer System Using Magnetic Resonant Coupling. Am. J. Electromagn. Appl. 2014, 2, 11–15. [Google Scholar]
- Liu, X.; Xia, C.; Yuan, X. Study of the Circular Flat Spiral Coil Structure Effect on Wireless Power Transfer System Performance. Energies 2018, 11, 2875. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Type | Monocrystalline | Maximum Power at STC | 130 W |
| Open-circuit voltage | 21.6 V | Short-circuit current | 7.94 A |
| Voltage at MPP | 18.0 V | Current at MPP | 7.22 A |
| Irradiance Factor (pu) | Optimal Resistance (W) | Exact Current (A) | Approximate Current (A) |
|---|---|---|---|
| 1.0 | 2.493 | 7.165 | 7.220 |
| 0.8 | 3.116 | 5.674 | 5.776 |
| 0.6 | 4.155 | 4.197 | 4.332 |
| 0.4 | 6.233 | 2.741 | 2.888 |
| 0.2 | 12.465 | 1.319 | 1.444 |
| Component | Value/Name |
|---|---|
| C1 and C2 | 680 nF |
| RL and RC | 10 mΩ |
| L1 and L2 | 7.35 µH |
| Ron | 2 mΩ |
| Diode | 1N4007 |
| Power MOSFET | IRF540N |
| Square Wave Generator | NE555 |
| Gate Driver IC | IR2110 |
| Not Gate IC | 74LS04 TTL IC |
| 5 V Voltage Regulator | LM7805 |
| Distance (cm) | Optimal Coefficient of Coupling | Practical RMS Receiving Voltage (V) | Simulation RMS Receiving Voltage (V) | Error of Voltage (%) |
|---|---|---|---|---|
| 2 | 0.7474 | 9.20 | 9.30 | 1.10 |
| 3 | 0.5662 | 10.10 | 10.21 | 1.09 |
| 4 | 0.4296 | 10.21 | 10.43 | 2.15 |
| 5 | 0.3287 | 9.56 | 9.79 | 2.41 |
| 6 | 0.2557 | 8.43 | 8.66 | 2.73 |
| 7 | 0.2038 | 7.24 | 7.45 | 2.90 |
| 8 | 0.1677 | 6.22 | 6.41 | 3.05 |
| 9 | 0.1027 | 5.43 | 5.59 | 2.94 |
| 10 | 0.1251 | 4.84 | 4.98 | 2.89 |
| 11 | 0.1122 | 4.38 | 4.51 | 2.96 |
| 12 | 0.1018 | 4.00 | 4.13 | 3.25 |
| k0 | 1.287 | k1 | −0.341 |
| k2 | 0.04005 | k3 | −0.002352 |
| k4 | 6.678 × 10−5 | k5 | −7.271 × 10−7 |
| f0 | −0.299 | f1 | 0.4990 |
| f2 | −0.115 | f3 | 0.0135 |
| f4 | −7.79 × 10−4 | f5 | 1.76 × 10−5 |
| PVG Power at STC | 130 W | Boost Inductor | 500 µH |
| Boost Capacitor | 1000 µF | Resonance Capacitors | 680 nF |
| Resonance Inductors | 7.35 µH | Load Resistance | (7, 9, 11) Ω |
| Irradiance of 723 W/m2 | ||||
| Load (Ω) | MPPT Controller | PV Power (W) | DC Power (W) | Efficiency (%) |
| 5 | Without | 68.0 | 62.1 | 66.1 |
| With | 75.2 | 68.5 | 91.1 | |
| 7 | Without | 51.8 | 48.1 | 51.2 |
| With | 89.3 | 81.9 | 91.7 | |
| 9 | Without | 41.5 | 39.0 | 41.5 |
| With | 89.5 | 82.8 | 92.5 | |
| Irradiance of 893 W/m2 | ||||
| Load (Ω) | MPPT Controller | PV Power (W) | DC Power (W) | Efficiency (%) |
| 5 | Without | 72.3 | 66.1 | 56.9 |
| With | 112.7 | 101.2 | 89.8 | |
| 7 | Without | 54.3 | 50.5 | 43.5 |
| With | 113.1 | 103.1 | 91.2 | |
| 9 | Without | 43.3 | 40.7 | 35.1 |
| With | 113.2 | 104.2 | 92.1 | |
| Distance (cm) | Control Strategy | Resonant Frequency (kHz) | Load Power (W) | DC Current (A) |
|---|---|---|---|---|
| 2 | PID | 50.00 51.00 | 55 | 2.05 |
| Adaptive HCC | 71 | 2.58 | ||
| AVIC | 53.70 | 92 | 3.37 | |
| 4 | PID | 50.00 56.00 | 17 | 0.78 |
| Adaptive HCC | 43 | 1.89 | ||
| AVIC | 59.10 | 78 | 3.36 | |
| 6 | PID | 50.00 60.00 | 6 | 0.41 |
| Adaptive HCC | 34 | 2.05 | ||
| AVIC | 61.90 | 53 | 3.22 | |
| 8 | PID | 50.00 61.00 | 2.5 | 0.30 |
| Adaptive HCC | 18 | 1.68 | ||
| AVIC | 63.26 | 34 | 3.13 | |
| 10 | PID | 50.00 62.00 | 1.4 | 0.26 |
| Adaptive HCC | 13 | 1.89 | ||
| AVIC | 63.78 | 22 | 3.10 | |
| 12 | PID | 50.00 63.00 | 1 | 0.25 |
| Adaptive HCC | 12 | 2.35 | ||
| AVIC | 64.10 | 16 | 3.10 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahdi, A.J.; Fahad, S.; Tang, W. An Adaptive Current Limiting Controller for a Wireless Power Transmission System Energized by a PV Generator. Electronics 2020, 9, 1648. https://doi.org/10.3390/electronics9101648
Mahdi AJ, Fahad S, Tang W. An Adaptive Current Limiting Controller for a Wireless Power Transmission System Energized by a PV Generator. Electronics. 2020; 9(10):1648. https://doi.org/10.3390/electronics9101648
Chicago/Turabian StyleMahdi, Ali Jafer, Shah Fahad, and Wenhu Tang. 2020. "An Adaptive Current Limiting Controller for a Wireless Power Transmission System Energized by a PV Generator" Electronics 9, no. 10: 1648. https://doi.org/10.3390/electronics9101648
APA StyleMahdi, A. J., Fahad, S., & Tang, W. (2020). An Adaptive Current Limiting Controller for a Wireless Power Transmission System Energized by a PV Generator. Electronics, 9(10), 1648. https://doi.org/10.3390/electronics9101648