Voltage Space Vector Equivalent Substitution Fault-Tolerance Control for Cascaded H-Bridge Multilevel Inverter with Current-Tracking


Abstract
1. Introduction
- (1)
- Short-circuiting the faulty unit and working in the state of reduced-capacity: This method is suitable for single-phase cascaded inverter [15]. In addition to short-circuiting the faulty unit, the non-faulty units corresponding to the faulty unit in the other two phases are also normally shielded in the three-phase inverter [16]. However, some non-faulty units are not fully utilized and there is a waste of hardware resources. The seven-level cascaded inverter was taken as an example in [17] to prove that in this fault-tolerant control, the effective output voltage amplitude of the inverter fell from 5.19Vdc in non-fault state to 3.46 Vdc in fault state, where Vdc was the DC-link voltage of the cascaded unit.
- (2)
- Neutral Point Shift (NPS): This method can implement fault-tolerant control in the case of only bypassing fault units [18]. The NPS is mostly used for control algorithms with modulated waves, which is not suitable for the method in this paper. With the NPS approach, the low-order harmonic and other issues can be rising [19].
- (3)
- Adjusting the DC-link voltage of the inverter: The DC-link voltage of the non-faulty unit in the fault phase was raised to the original 2N/(2N − 1) times in [20,21] and the fault- tolerant control was performed on the basis of this. But the method is only suitable for the case where the DC-link voltage is controllable, and the voltage stress of the power electronic component can be increased. Therefore, a fault-tolerant control method combining NPS with the adjustment of DC-link voltage was proposed in [22,23], which can reduce the voltage stress of the power electronic component under the fault state. With this method, the increase of the DC-link voltage changes the position of the voltage vectors, which makes the selection algorithm of voltage vector complex.
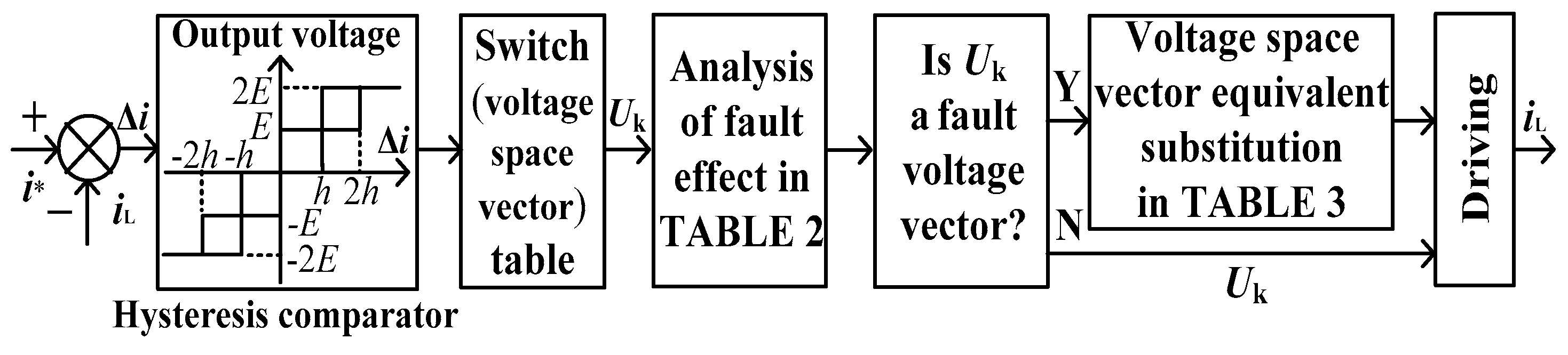
2. Strategy of Current-Tracking Control
3. Fault-Tolerant Control Strategy in Fault State
3.1. Analysis of Fault Effect
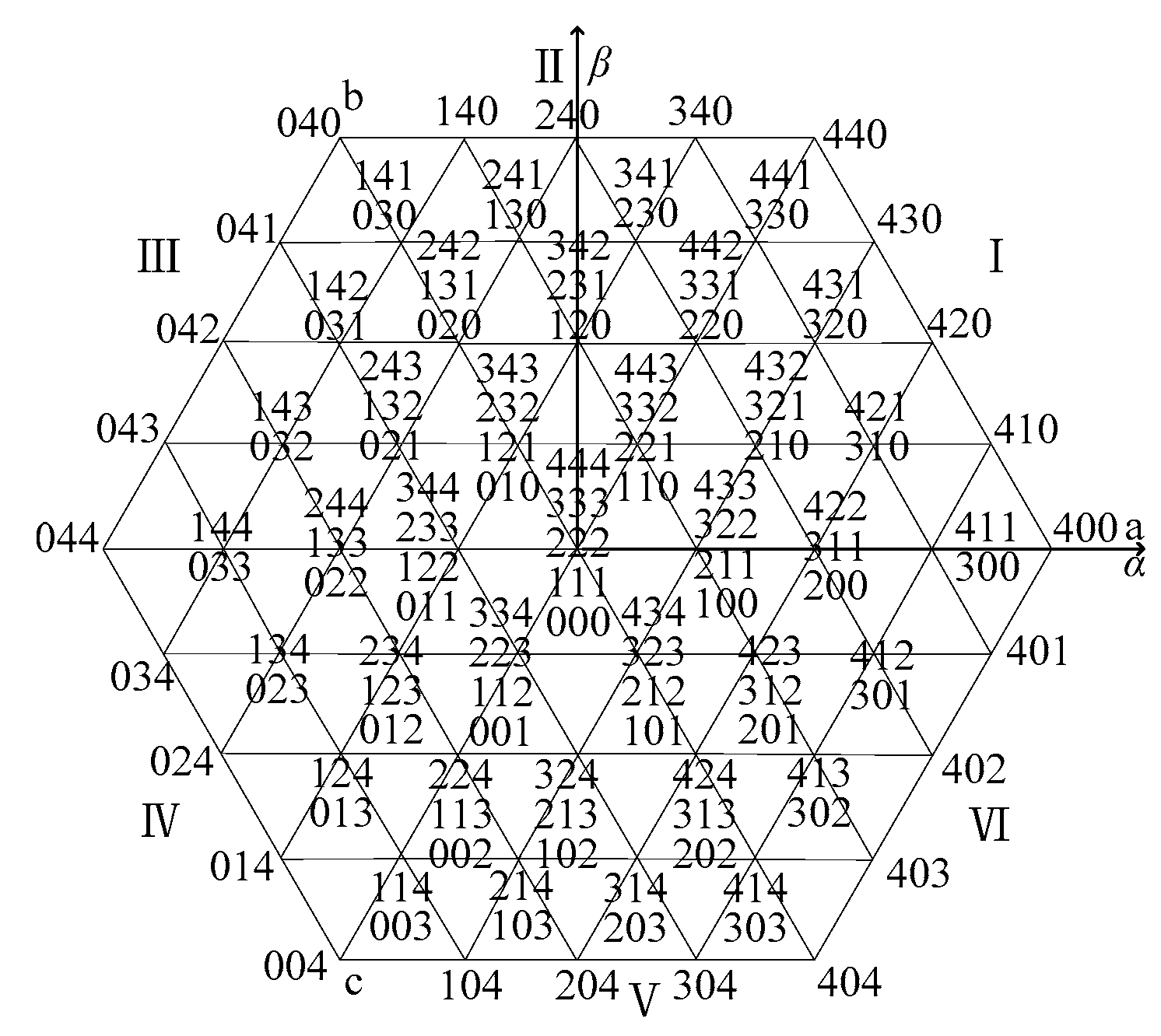
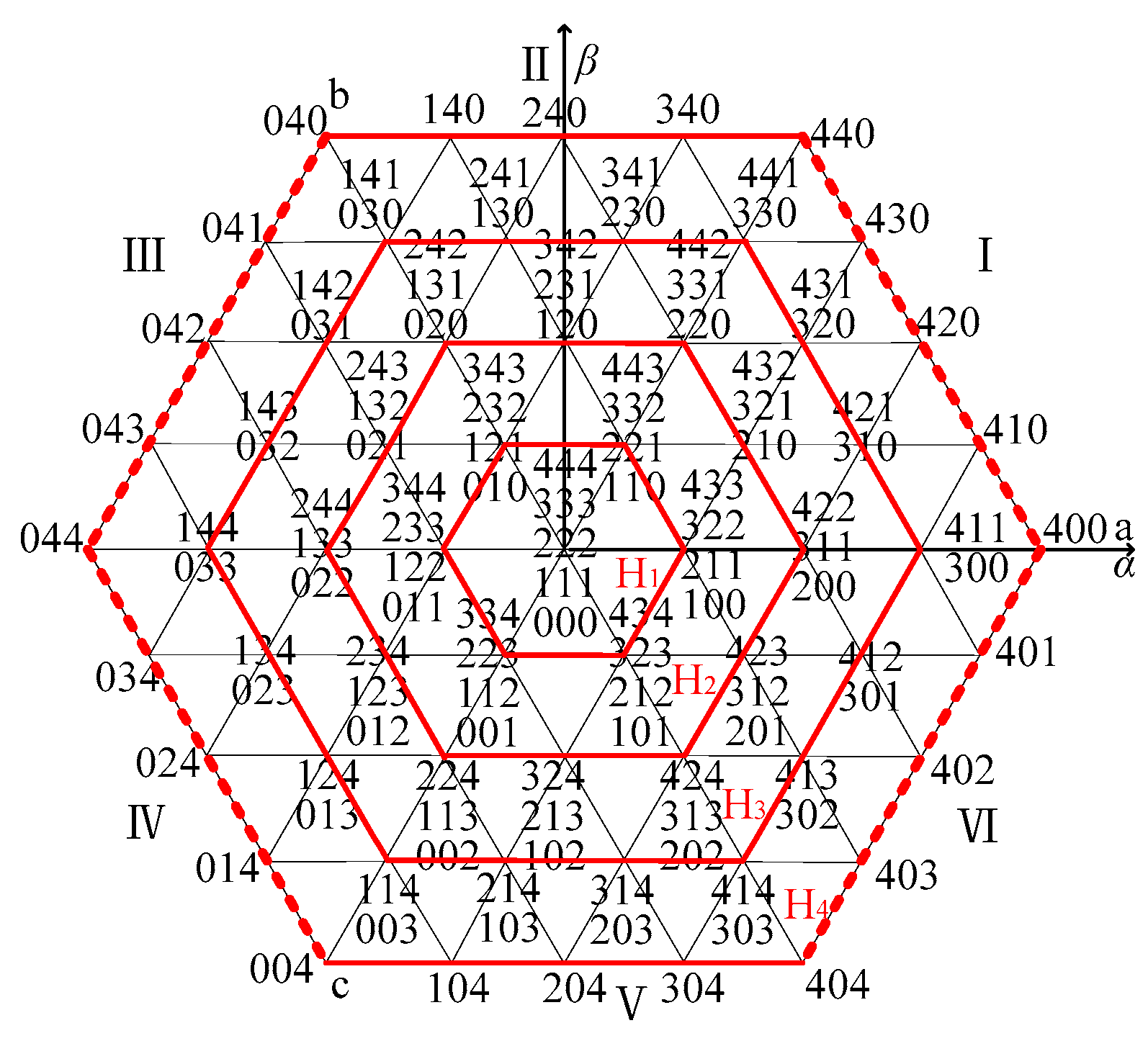
3.2. Strategy for Voltage Vector Substitution
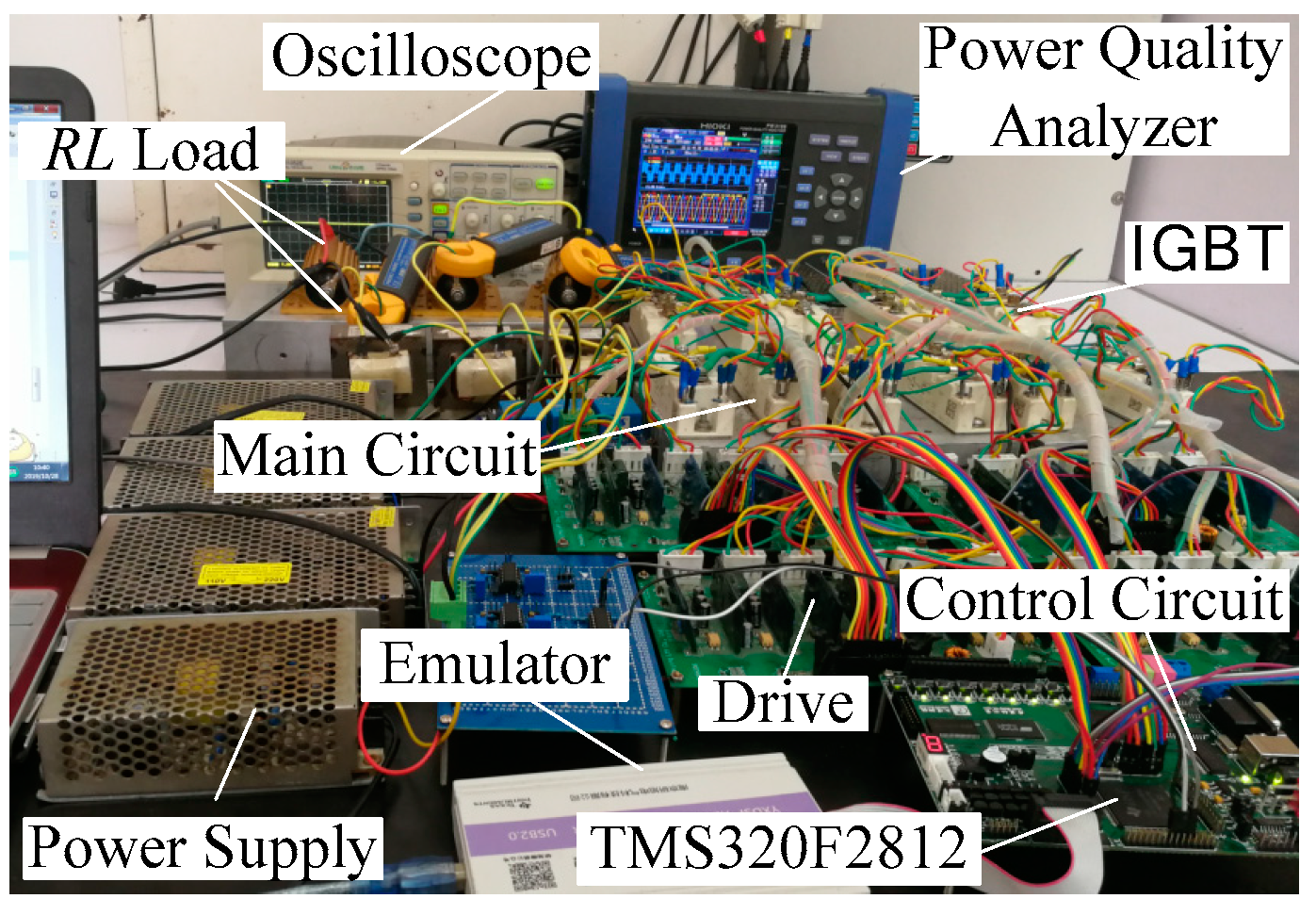
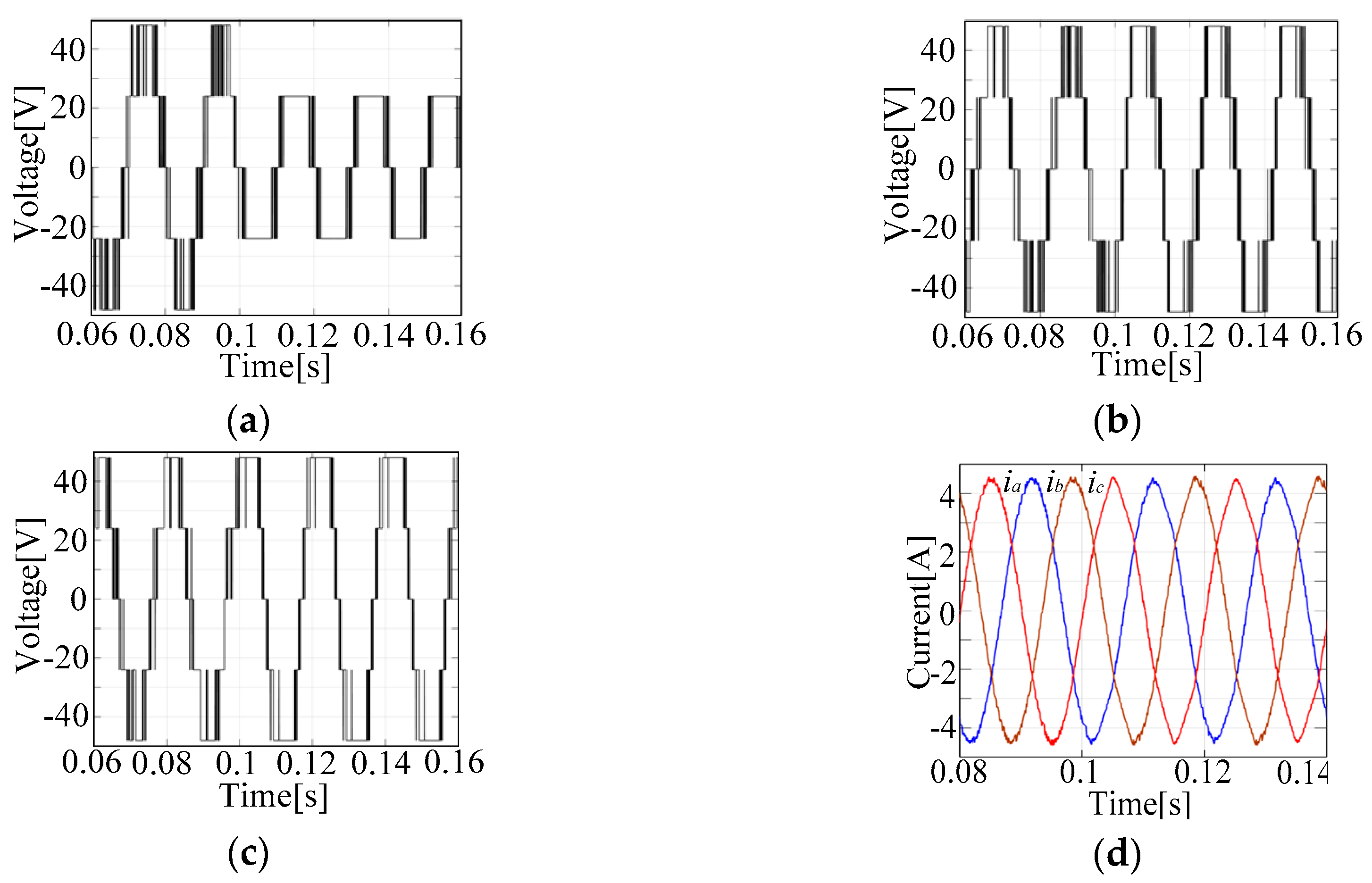
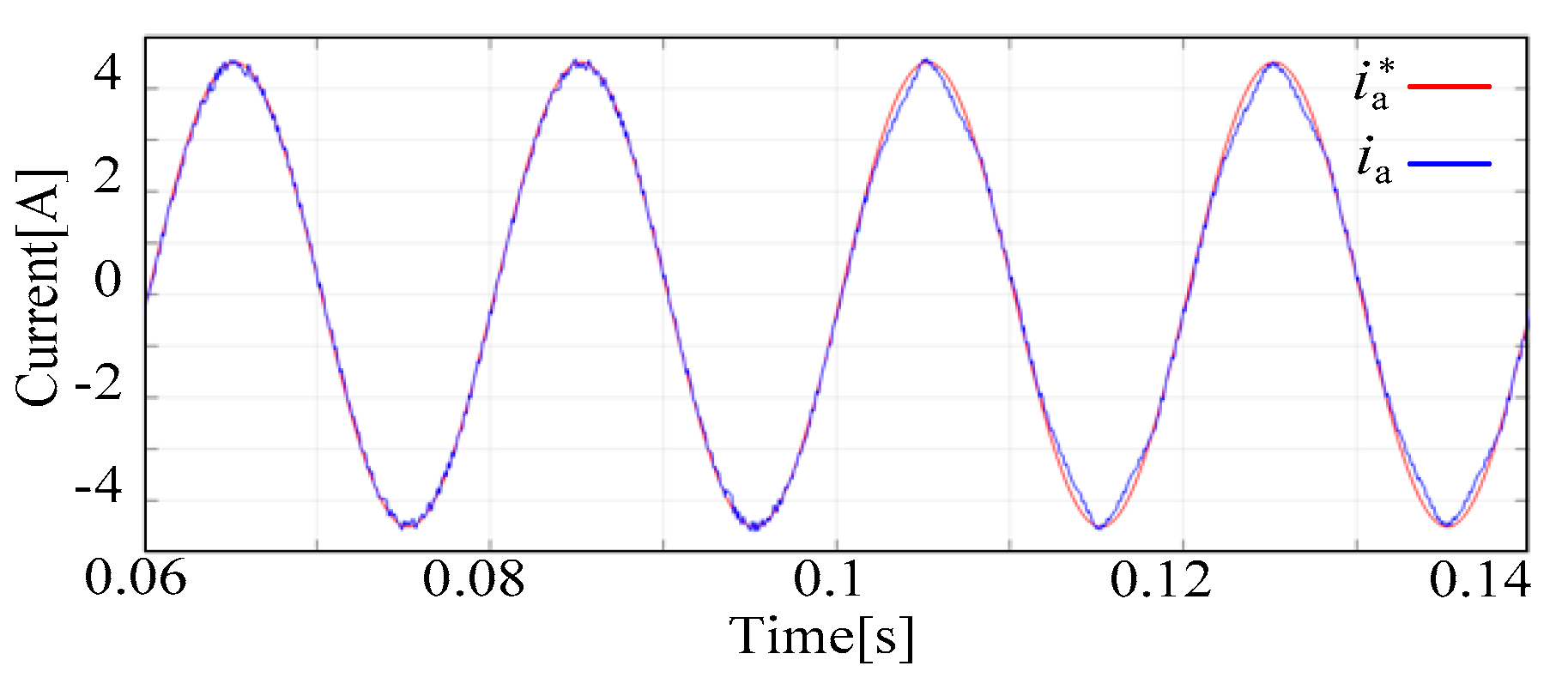
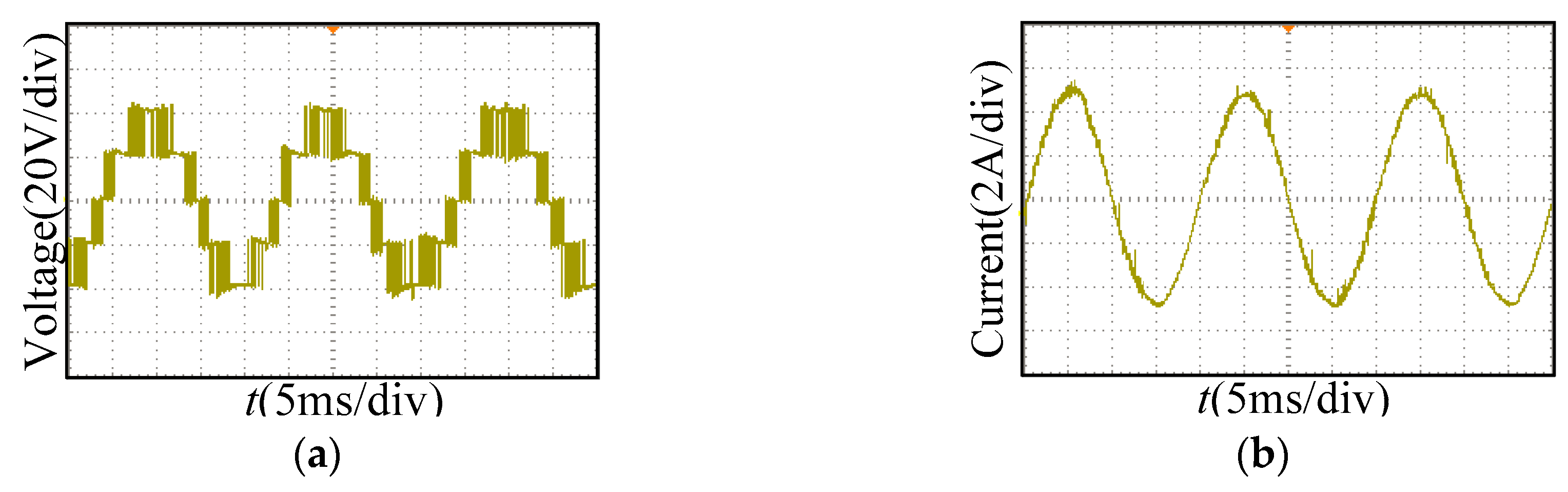
4. Simulation and Experiment
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sajadi, R.; Iman-Eini, H.; Bakhshizadeh, M.K.; Neyshabouri, Y.; Farhangi, S. Selective Harmonic Elimination Technique with Control of Capacitive DC-Link Voltages in an Asymmetric Cascaded H-Bridge Inverter for STATCOM Application. IEEE Trans. Ind. Electron. 2018, 65, 8788–8796. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, J. Overview of fault-tolerant techniques for multilevel voltage source inverters. Trans. China Electrotech. Soc. 2015, 30, 39–50. [Google Scholar]
- Wu, Y.; Jiang, B.; Lu, N. A Descriptor System Approach for Estimation of Incipient Faults with Application to High-Speed Railway Traction Devices. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2108–2118. [Google Scholar] [CrossRef]
- Yang, S.; Tang, Y.; Wang, P. Seamless Fault-Tolerant Operation of a Modular Multilevel Converter with Switch Open-Circuit Fault Diagnosis in a Distributed Control Architecture. IEEE Trans. Power Electron. 2018, 33, 7058–7070. [Google Scholar] [CrossRef]
- de Oliveira, A.B.; Moreno, R.L.; Ribeiro, E.R. Short-Circuit Fault Diagnosis Based on Rough Sets Theory for a Single-Phase Inverter. IEEE Trans. Power Electron. 2019, 34, 4747–4764. [Google Scholar] [CrossRef]
- Selvaraj, R.; Desingu, K.; Chelliah, T.R.; Khare, D.; Bharatiraja, C. Fault Tolerant Operation of Parallel-Connected 3L-Neutral-Point Clamped Back-to-Back Converters Serving to Large Hydro-Generating Units. IEEE Trans. Ind. Appl. 2018, 54, 5429–5443. [Google Scholar] [CrossRef]
- Wu, P.; Cheng, P. A Fault-Tolerant Control Strategy for the Delta-Connected Cascaded Converter. IEEE Trans. Power Electron. 2018, 33, 10946–10953. [Google Scholar] [CrossRef]
- Kou, X.; Corzine, K.A.; Familiant, Y.L. A unique fault-tolerant design for flying capacitor multilevel inverter. IEEE Trans. Power Electron. 2004, 19, 979–987. [Google Scholar] [CrossRef]
- Abdelghani, H.B.; Abdelghani, A.B.B.; Richardeau, F.; Blaquière, J.; Mosser, F. Post-fault reconfiguration for a versatile and hybrid 4 Leg NPC-flying capacitor topology. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1502–1507. [Google Scholar]
- Zhang, J.; Geng, Z.; Xu, S. Fault diagnosis and fault tolerant control for APF based on T-Type inverter. Proc. CSEE 2019, 39, 245–255. [Google Scholar]
- Mirafzal, B. Survey of Fault-Tolerance Techniques for Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Electron. 2014, 61, 5192–5202. [Google Scholar] [CrossRef]
- Moamaei, P.; Mahmoudi, H.; Ahmadi, R. Fault-tolerant operation of cascaded H-Bridge inverters using one redundant cell. In Proceedings of the 2015 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 20–21 February 2015; pp. 1–5. [Google Scholar]
- Salimian, H.; Iman-Eini, H. Fault-Tolerant Operation of Three-Phase Cascaded H-Bridge Converters Using an Auxiliary Module. IEEE Trans. Ind. Electron. 2017, 64, 1018–1027. [Google Scholar] [CrossRef]
- Jahan, H.K.; Panahandeh, F.; Abapour, M.; Tohidi, S. Reconfigurable Multilevel Inverter with Fault-Tolerant Ability. IEEE Trans. Power Electron. 2018, 33, 7880–7893. [Google Scholar] [CrossRef]
- Haji-Esmaeili, M.M.; Naseri, M.; Khoun-Jahan, H.; Abapour, M. Fault-tolerant structure for cascaded H-bridge multilevel inverter and reliability evaluation. IET Power Electron. 2017, 10, 59–70. [Google Scholar] [CrossRef]
- Hammond, P.W. Enhancing the reliability of modular medium-voltage drives. IEEE Trans. Ind. Electron. 2002, 49, 948–954. [Google Scholar] [CrossRef]
- Aleenejad, M.; Mahmoudi, H.; Moamaei, P.; Ahmadi, R. A New Fault-Tolerant Strategy Based on a Modified Selective Harmonic Technique for Three-Phase Multilevel Converters with a Single Faulty Cell. IEEE Trans. Power Electron. 2016, 31, 3141–3150. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Lee, K. A Modified Level-Shifted PWM Strategy for Fault-Tolerant Cascaded Multilevel Inverters with Improved Power Distribution. IEEE Trans. Ind. Electron. 2016, 63, 7264–7274. [Google Scholar] [CrossRef]
- Sun, L.; Wu, Z.; Xiao, F.; Cai, X.; Wang, S. Suppression of Real Power Back Flow of Nonregenerative Cascaded H-Bridge Inverters Operating Under Faulty Conditions. IEEE Trans. Power Electron. 2016, 31, 5161–5175. [Google Scholar]
- Song, W.; Huang, A.Q. Fault-Tolerant Design and Control Strategy for Cascaded H-Bridge Multilevel Converter-Based Statcom. IEEE Trans. Ind. Electron. 2010, 57, 2700–2708. [Google Scholar] [CrossRef]
- Neyshabouri, Y.; Iman-Eini, H. A New Fault-Tolerant Strategy for a Cascaded H-Bridge Based STATCOM. IEEE Trans. Ind. Electron. 2018, 65, 6436–6445. [Google Scholar] [CrossRef]
- Maharjan, L.; Yamagishi, T.; Akagi, H.; Asakura, J. Fault-Tolerant Operation of a Battery-Energy- Storage System Based on a Multilevel Cascade PWM Converter with Star Configuration. IEEE Trans. Power Electron. 2010, 25, 2386–2396. [Google Scholar] [CrossRef]
- Aleenejad, M.; Mahmoudi, H.; Ahmadi, R. A Fault-Tolerant Strategy Based on Fundamental Phase-Shift Compensation for Three-Phase Multilevel Converters with Quasi-Z-Source Networks with Discontinuous Input Current. IEEE Trans. Power Electron. 2016, 31, 7480–7488. [Google Scholar] [CrossRef]
- Ounejjar, Y.; Al-Haddad, K.; Dessaint, L.A. A Novel Six-Band Hysteresis Control for the Packed U Cells Seven-Level Converter: Experimental Validation. IEEE Trans. Ind. Electron. 2012, 59, 3808–3816. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Z.; Liu, H.; Chen, Y. A hysteresis current vector control for medium voltage active power filter based on cascaded multilevel inwerter. In Proceedings of the Zhongguo Dianji Gongcheng Xuebao (Chinese Society of Electrical Engineering), Wuhan, China, 15 December 2005; Volume 25, pp. 86–90. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
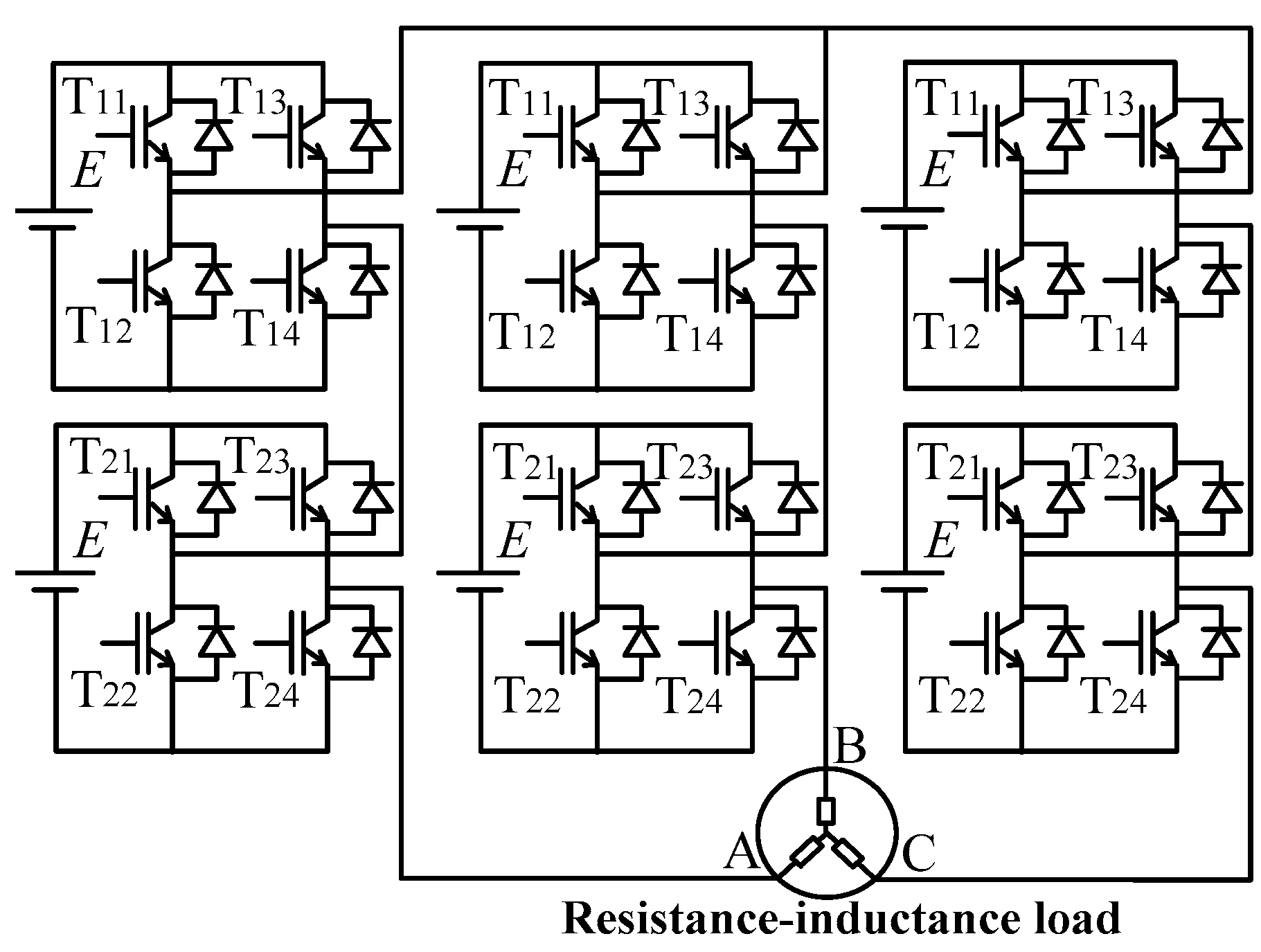
| Vector | T11 | T12 | T13 | T14 | T21 | T22 | T23 | T24 | Ua |
|---|---|---|---|---|---|---|---|---|---|
| 400 | on | off | off | on | on | off | off | on | 2E |
| 300 | × | × | × | × | on | off | off | on | E |
| Sector | I | II | III | IV | V | VI |
|---|---|---|---|---|---|---|
| Phase A | √ | × | √ | √ | × | √ |
| Phase B | × | √ | √ | × | √ | √ |
| Phase C | √ | √ | × | √ | √ | × |
| Sector | Uk at H4 | Uk at H3 | Uk at H2 | Uk at H1 |
|---|---|---|---|---|
| I VI | (x − 1, y, z) | (x − 1, y − 1, z−1) | (x − 1, y − 1, z − 1) (x − 2, y − 2, z − 2) | (x − 1, y − 1, z − 1) (x − 2, y − 2, z − 2)(x − 3, y − 3, z − 3) |
| III IV | (x + 1, y, z) | (x + 1, y + 1, z + 1) | (x + 1, y + 1, z + 1) (x + 2, y + 2, z + 2) | (x + 1, y + 1, z + 1) (x + 2, y + 2, z + 2) (x + 3, y + 3, z + 3) |
| II V | × | × | × | × |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Liu, C.; Wang, Y. Voltage Space Vector Equivalent Substitution Fault-Tolerance Control for Cascaded H-Bridge Multilevel Inverter with Current-Tracking. Electronics 2020, 9, 93. https://doi.org/10.3390/electronics9010093
Li G, Liu C, Wang Y. Voltage Space Vector Equivalent Substitution Fault-Tolerance Control for Cascaded H-Bridge Multilevel Inverter with Current-Tracking. Electronics. 2020; 9(1):93. https://doi.org/10.3390/electronics9010093
Chicago/Turabian StyleLi, Guohua, Chunwu Liu, and Yufeng Wang. 2020. "Voltage Space Vector Equivalent Substitution Fault-Tolerance Control for Cascaded H-Bridge Multilevel Inverter with Current-Tracking" Electronics 9, no. 1: 93. https://doi.org/10.3390/electronics9010093
APA StyleLi, G., Liu, C., & Wang, Y. (2020). Voltage Space Vector Equivalent Substitution Fault-Tolerance Control for Cascaded H-Bridge Multilevel Inverter with Current-Tracking. Electronics, 9(1), 93. https://doi.org/10.3390/electronics9010093