Imaging of the Internal Structure of Permafrost in the Tibetan Plateau Using Ground Penetrating Radar

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
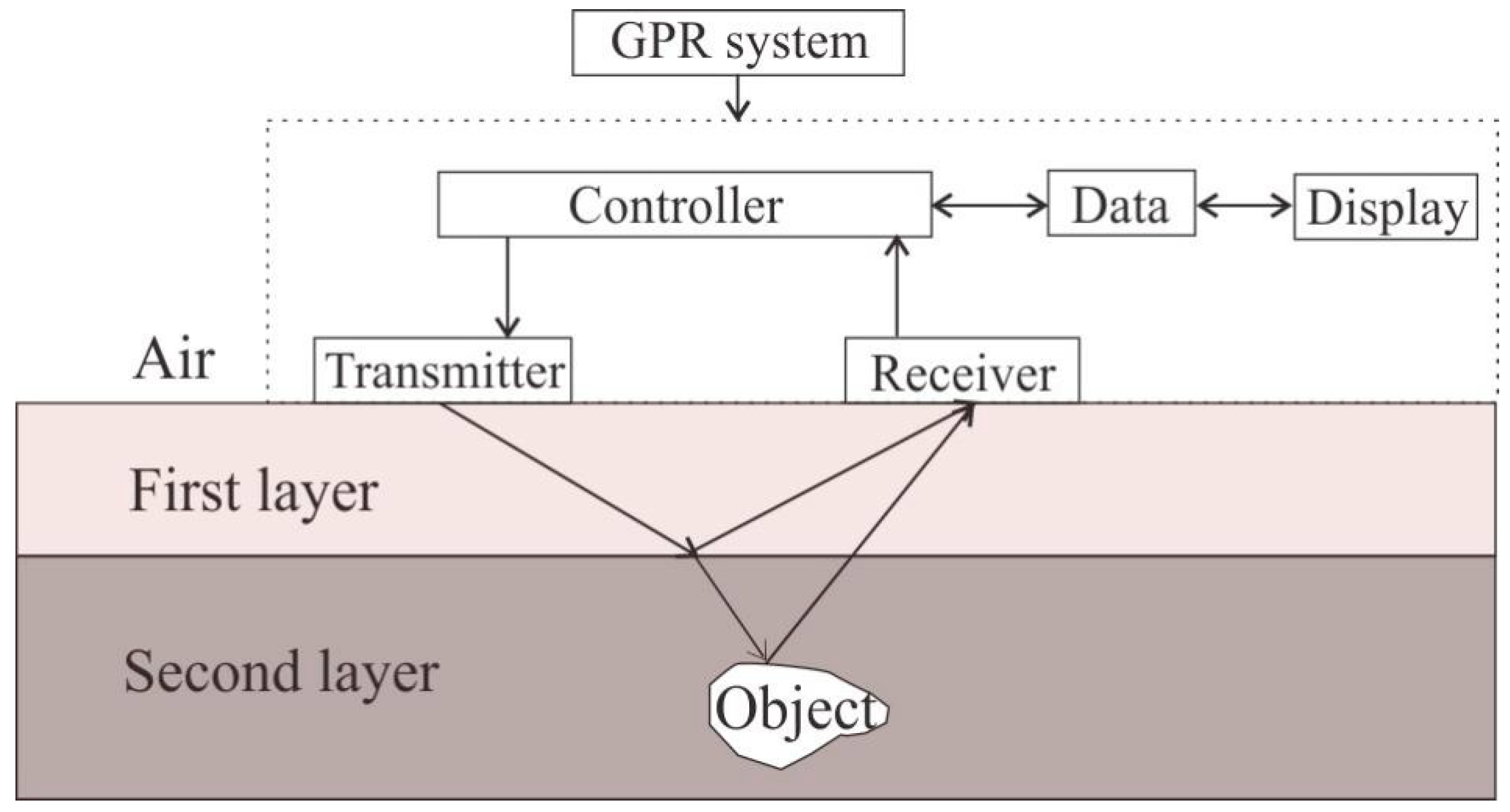
2.1. Principles of GPR
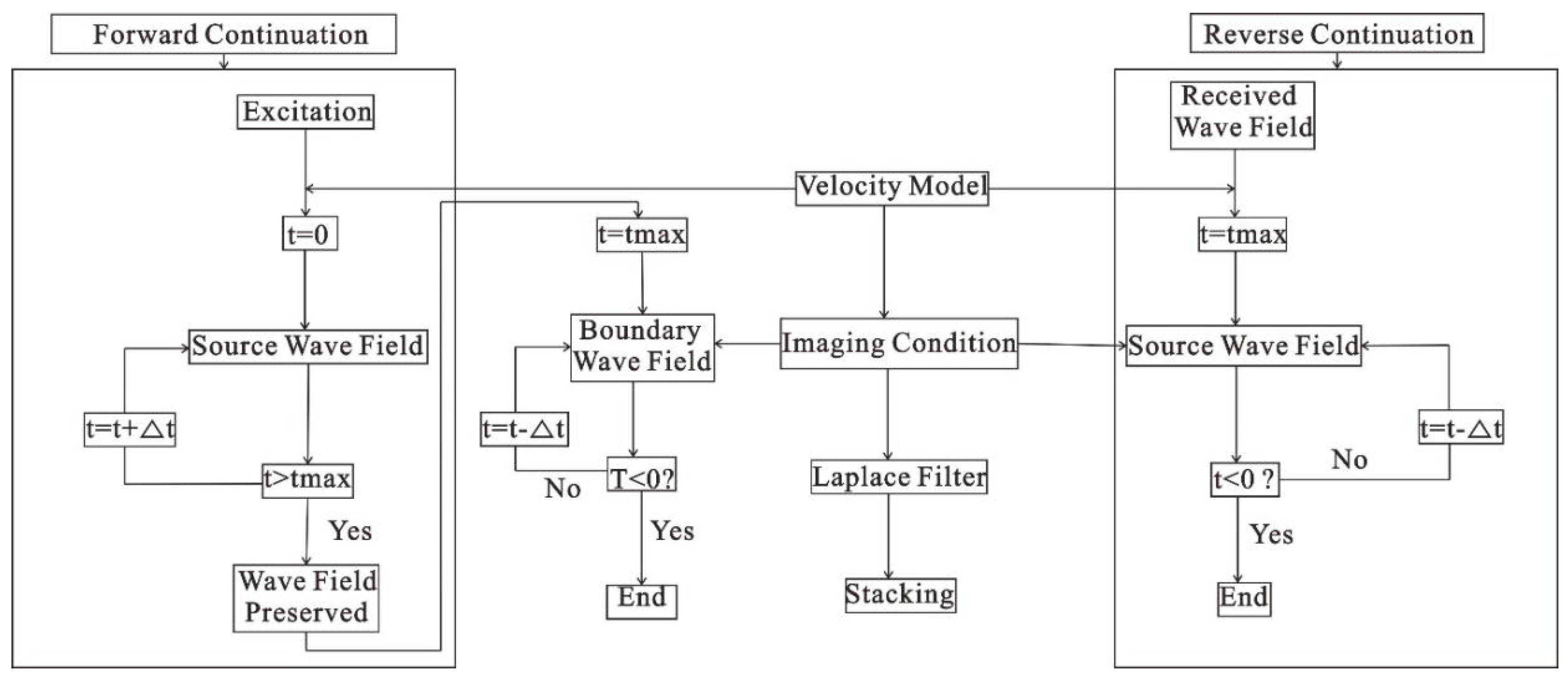
2.2. Reverse-Time Migration (RTM)
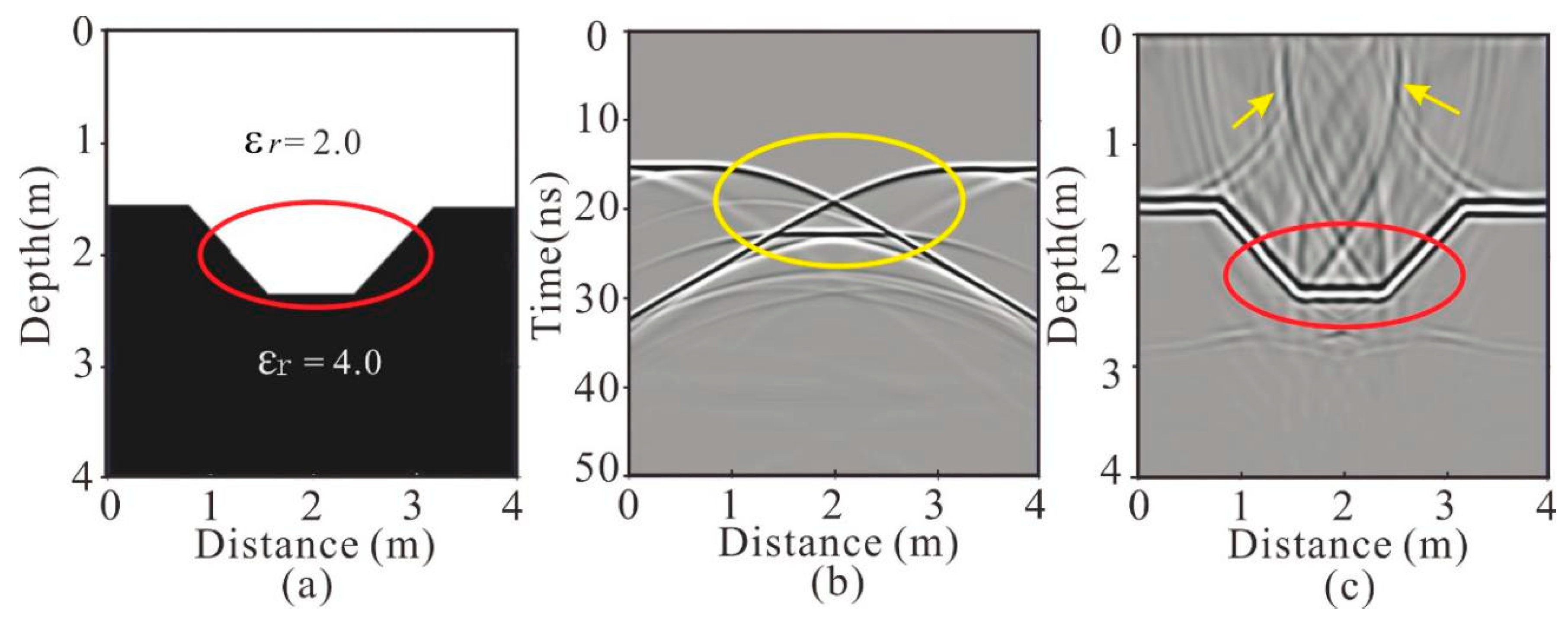
2.3. Two-Dimensional Radar Wave Forward Modeling
2.4. The Forward Modeling Data RTM
2.5. RTM of GPR Profiles in the Beiluhe Region
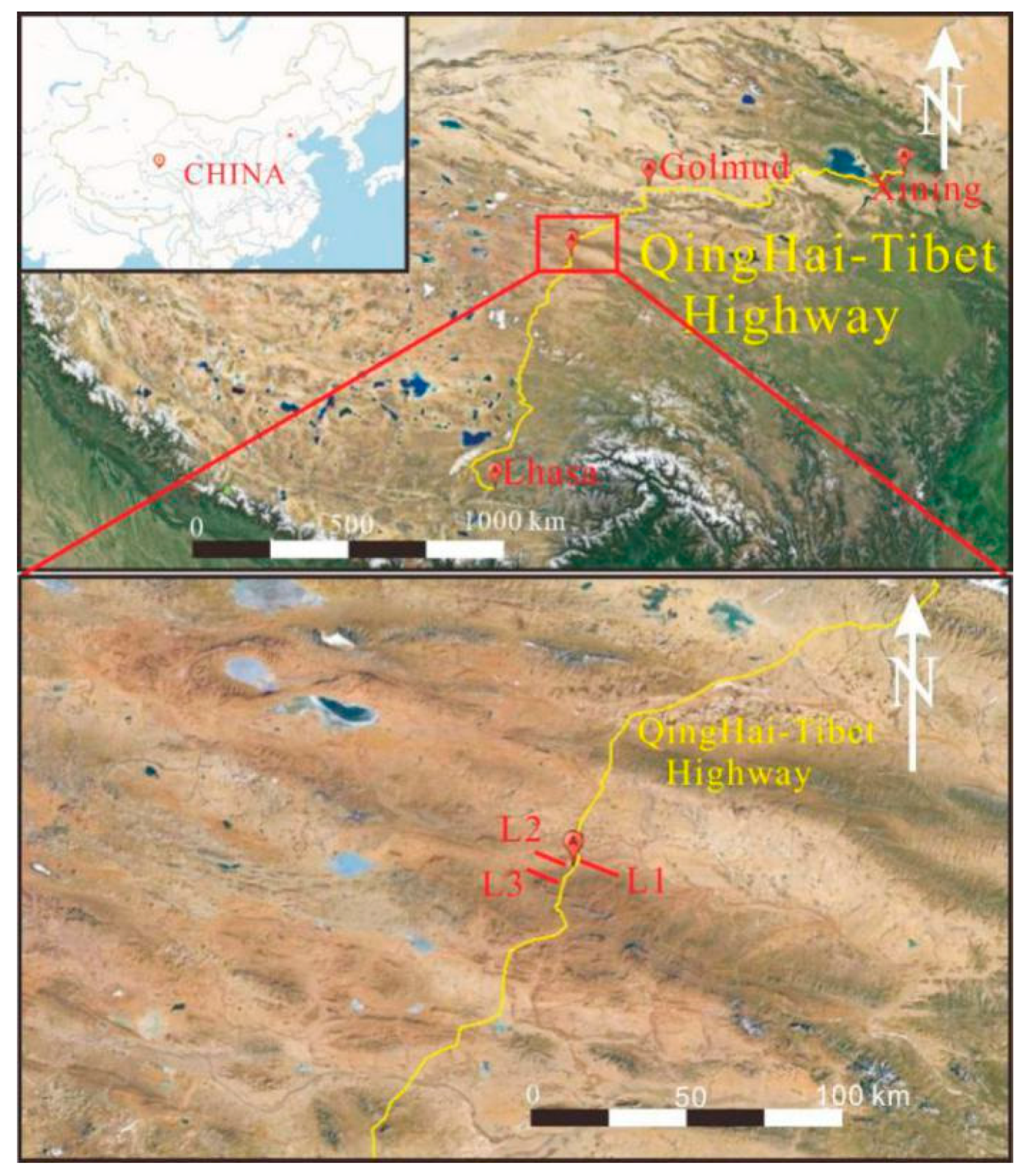
2.5.1. Brief Description of the Study Area
2.5.2. GPR Data Acquisition and Processing
3. Results
3.1. Diffraction in Permafrost Internal
3.2. Fine Structure in Internal Permafrost Layer
3.3. Small Lateral Fault Broken
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gregory, P.; Wayne, W.H.P.; Kevin, K.W. Geophysical mapping of ground ice using a combination of capacitive coupled resistivity and ground-penetrating radar, Northwest Territories. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Chen, S.; Liu, W.; Qin, X.; Liu, Y.; Zhang, T.; Chen, K.; Hu, F.; Ren, J.; Qin, D. Response characteristics of vegetation and soil environment to permafrost degradation in the upstream regions of the Shule River Basin. Environ. Res. Lett. 2012, 7, 45406–45416. [Google Scholar] [CrossRef]
- Luo, J.; Niu, F.J.; Lin, Z.J.; Lu, J.H. Permafrost Features around a Representative Thermokarst Lake in BeiLuhe on the Tibetan Plateau. J. Glaciol. Geocryol. 2012, 34, 1110–1117. [Google Scholar]
- Brosten, T.R.; Bradford, J.H.; McNamara, J.P.; Gooseff, M.N.; Zarnetske, J.P.; Bowden, W.B.; Johnston, M.E. Estimating 3D variation in active-layer thickness beneath arctic streams using ground-penetrating radar. J. Hydrol. 2009, 373, 479–486. [Google Scholar] [CrossRef]
- Lupascu, M.; Welker, J.M.; Seibt, U.; Maseyk, K.; Xu, X.; Czimczik, C.I. High Arctic wetting reduces permafrost carbon feedbacks to climate warming. Nat. Clim. Chang. 2014, 4, 51–55. [Google Scholar] [CrossRef]
- Schuur, E.A.G.; Mcguire, A.D.; Schadel, C. Climate change and the permafrost carbon feedback. Nature 2015, 520, 171–179. [Google Scholar] [CrossRef]
- Lin, Z.J.; Niu, F.J.; Fang, J.H.; Luo, J.; Yin, G.A. Interannual variations in the hydrothermal regime around a thermokarst lake in Beiluhe, Qinghai-Tibet Plateau. Geomorphology 2017, 276, 16–26. [Google Scholar] [CrossRef]
- Yin, G.A.; Niu, F.J.; Lin, Z.J.; Luo, J. Effects of local factors and climate on permafrost conditions and distribution in Beiluhe basin, Qinghai-Tibet Plateau, China. Sci. Total Environ. 2017, 581, 472–485. [Google Scholar] [CrossRef]
- Yang, C.; Wu, T.H.; Wang, J.M.; Yao, J.M.; Li, R.; Zhao, L.; Xie, C.W.; Zhu, X.F.; Ni, J.; Hao, J.M. Estimating Surface Soil Heat Flux in Permafrost Regions Using Remote Sensing-Based Models on the Northern Qinghai-Tibetan Plateau under Clear-Sky Conditions. Remote Sens. 2019, 11, 416. [Google Scholar] [CrossRef]
- Li, R.; Ding, Y.Z.; Wu, T.H.; Yao, X.; Du, E.; Liu, G.Y.; Qiao, Y.P. Temporal and spatial variations of the active layer along the Qinghai Tibet Highway in a permafrost region. Chin. Sci. Bull. 2012, 57, 4609–4616. [Google Scholar] [CrossRef]
- Peng, H.; Ma, W.; Mu, Y.H.; Jin, L.; Yuan, K. Degradation characteristics of permafrost under the effect of climate warming and engineering disturbance along the Qinghai-Tibet Highway. Nat. Hazards 2015, 75, 2589–2605. [Google Scholar] [CrossRef]
- Xiao, J.; Liu, L. Permafrost subgrade condition assessment using extrapolation by deterministic deconvolution on multi-frequency GPR data acquired along the Qinghai-Tibet railway. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 83–90. [Google Scholar] [CrossRef]
- Qing, W.; Yupeng, S. Calculation and Interpretation of Ground Penetrating Radar for Temperature and Relative Water Content of Seasonal Permafrost in Qinghai-Tibet Platea. Electronics 2019, 8, 731. [Google Scholar]
- Schwamborn, G.J.; Dix, J.K.; Bull, J.M.; Rachold, V. High resolution Seismic and Ground Penetrating radar Geophysical Profiling of a Thermokarst Lake in the Western Lena Delta, Northern Siberia. Permafr. Periglac. Process. 2002, 13, 259–269. [Google Scholar] [CrossRef]
- Jorgensen, A.S.; Andreasen, F. Mapping of permafrost surface using ground-penetrating radar at Kangerlussuaq Airport, Western Greenland. Gold Reg. Sci. Technol. 2007, 48, 64–72. [Google Scholar] [CrossRef]
- Wainstein, P.; Moorman, B.; Whitehead, K. Glacial conditions that contribute to the regeneration of Fountain Glacier proglacialicing, Bylot Island, Canada. Hydrol. Process. 2014, 28, 2749–2760. [Google Scholar] [CrossRef]
- Merz, K.; Maurer, H.; Buchli, T.; Horstmeyer, H.; Green, A.G.; Springman, S.M. Evaluation of Ground Based and Helicopter Ground Penetrating radar Data Acquired Across an Alpine Rock Glacier. Permafr. Periglac. Process. 2015, 26, 13–27. [Google Scholar] [CrossRef]
- Liu, L.; Qian, R.Y. Ground Penetrating Radar: A critical tool in near-surface geophysics. Chin. J. Geophys. 2015, 58, 2606–2617. [Google Scholar]
- Thomas, M.U.; Jeffrey, T.R.; Claire, A.; Douglas, D.A.; Sturt, W.M.; Owen, K.M.; Andrew, H.T.; Christopher, B.W. Frozen: The Potential and Pitfalls of Ground-Penetrating Radar for Archaeology in the Alaskan Arctic. Remote Sens. 2016, 8, 1007. [Google Scholar]
- Wang, Y.P.; Jin, H.J.; Li, G.Y. Investigation of the freeze–thaw states of foundation soils in permafrost areas along the China–Russia Crude Oil Pipeline (CRCOP) route using ground-penetrating radar (GPR). Cold Reg. Sci. Technol. 2016, 126, 10–21. [Google Scholar] [CrossRef]
- Campbell, S.; Affleck, R.T.; Sinclair, S. Ground-penetrating radar studies of permafrost, periglacial, and nearsurface geology at McMurdo Station, Antarctica. Cold Reg. Sci. Technol. 2018, 148, 38–49. [Google Scholar] [CrossRef]
- Shen, Y.P.; Zuo, R.F.; Liu, J.K.; Tian, Y.H.; Wang, Q. Characterization and evaluation of permafrost thawing using GPR attributes in the Qinghai-Tibet Plateau. Cold Reg. Sci. Technol. 2018, 151, 302–313. [Google Scholar] [CrossRef]
- Wu, T.; Li, C.G.; Nan, Z. Using ground penetrating radar to detect permafrost degradation in the northern limit of permafrost on the Tibetan Plateau. Cold Reg. Sci. Technol. 2005, 41, 211–219. [Google Scholar] [CrossRef]
- Pang, Q.Q.; Zhao, L.; Li, S.X.; Ding, Y. Active layer thickness variations on the Qinghai-Tibet Plateau under the scenarios of climate change. Environ. Earth Sci. 2012, 66, 849–857. [Google Scholar] [CrossRef]
- Sun, R.; Mcmechan, G.A. Prestack 2D parsimonious Kirchhoff depth migration of elastic seismic data. Geophysics 2011, 76, 157–164. [Google Scholar] [CrossRef]
- Li, S.; Fomel, S. Kirchhoff migration using Eikonal based computation of traveltime source derivatives. Gephysics 2013, 78, 211–219. [Google Scholar] [CrossRef][Green Version]
- Sun, R.; Mcmechan, G.A.; Lee, C.S.; Chow, J.; Chen, C.H. Prestack scalar reverse time depth migration of 3D elastic seismic data. Geophysics 2006, 71, 190–207. [Google Scholar] [CrossRef]
- Guitton, A.; Kaelin, B.; Biondi, B. Least-squares attenuation of reverse time migration artifacts. Geophysics 2007, 72, 19–23. [Google Scholar] [CrossRef]
- Shragge, J. Reverse time migration from topography. Geophysics 2014, 79, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.H.; Wang, W.M.; Fu, L.Y.; Yao, Z.X. 3D Fourier finite-difference migration by alternating direction implicit plus interpolation. Geophys. Prospect. 2008, 56, 95–103. [Google Scholar] [CrossRef]
- Fisher, E.; Mcmechan, G.A.; Annan, A.P.; Cosway, S.W. Examples of reverse-time migration of single-channel, ground-penetrating radar profiles. Geophysics 1992, 57, 577–586. [Google Scholar] [CrossRef]
- Almeida, E.R.; Porsani, J.L.; Catapano, I.; Gennarelli, G.; Soldovieri, F. Microwave Tomography Enhanced GPR in Forensic Surveys: The Case study of a Tropical Environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 1, 115–124. [Google Scholar] [CrossRef]
- Sakamoto, T.; Sato, T.; Aubry, P.; Yarovoy, A. Ultra-Wideband radar Imaging Using a Hybrid of Kirchhoff Migration and Stolt F-K Migration with an Inverse Boundary Scattering Transform. IEEE Trans. Antennas Propag. 2015, 63, 3502–3512. [Google Scholar] [CrossRef]
- Sanada, Y.; Ashid, Y. An imaging algorithm for GPR data. In Symposium on the Application of Engineering and Environmental Problems; Environmental & Engineering Geophysical: Denver, CO, USA, 1999; pp. 564–573. [Google Scholar]
- Leuschen, C.J.; Plumb, R.G. A matched-filter-based reverse time migration algorithm for ground-penetrating radar data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 929–936. [Google Scholar] [CrossRef]
- Zhou, H.; Stao, M.; Liu, H. Migration velocity analysis and prestack migration of common-transmitter GPR data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 86–91. [Google Scholar] [CrossRef]
- Liu, S.; Lei, L.L.; Fu, L.; Wu, J. Application of prestack reverse time migration based on FWI velocity Estimation to ground penetrating radar data. J. Appl. Geophys. 2014, 107, 1–7. [Google Scholar] [CrossRef]
- Daniel, D.J. Ground Penetrating Radar, 2nd ed.; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Luca, B.C.; Fabio, T.; Nikos, E.; Francesco, B. Signal Processing of GPR Data for Road Surveys. Geosciences 2019, 9, 96. [Google Scholar]
- Ukaegbu, I.K.; Gamage, K.A.; Aspinall, M.D. Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector. Remote Sens. 2019, 11, 141. [Google Scholar] [CrossRef]
- Yan, H.Y.; Liu, Y. Acoustic prestack reverse time migration using the adaptive high-order finite-difference method in time-space domain. Chin. J. Geophys. 2013, 56, 181–195. [Google Scholar]
- Zhang, Y.; Sun, J. Practical issues in reverse time migration: True amplitude gathers noise removal and harmonic source encoding. EAGE Ext. Abstr. 2009, 1, 1–5. [Google Scholar]
- Luo, J.; Yin, G.A.; Niu, F.J.; Lin, Z.J.; Liu, M.H. High Spatial Resolution Modeling of Climate Change Impacts on Permafrost Thermal Conditions for the Beiluhe Basin, Qinghai-Tibet Plateau. Remote Sens. 2019, 11, 1294. [Google Scholar] [CrossRef]
- Sham, J.F.; Lai, W.W. Development of a new algorithm for accurate estimation of GPR’s wave propagation velocity by common-offset survey method. NDT E Int. 2016, 83, 104–113. [Google Scholar] [CrossRef]
- Cui, F.; Li, S.Y.; Wang, L.B. The accurate estimation of GPR migration velocity and comparison of imaging methods. J. Appl. Geophys. 2018, 159, 573–585. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Y.B.; Sun, Y.; Niu, F.J.; Li, G.Y.; Gao, Z.Y. Creep characteristics and process analyses of a thaw slump in the permafrost region of the Qinghai-Tibet Plateau, China. Geomorphology 2017, 293, 1–10. [Google Scholar] [CrossRef]
- Wollschlager, U.; Gerhards, H.; Yu, Q.; Roth, K. Multi-channel ground-penetrating radar to explore spatial variations in thaw depth and moisture content in the active layer of a permafrost site. Cryosphere 2010, 4, 269–283. [Google Scholar] [CrossRef]
- Wu, Q.B.; Hou, Y.D.; Yun, H.B.; Liu, Y.Z. Changes in active-layer thickness and near-surface permafrost between 2002 and 2012 in alpine ecosystems, Qinghai-Xizang (Tibet) Plateau, China. Glob. Planet. Chang. 2015, 124, 149–155. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Fu, Z.; Lu, X.; Qin, S.; Wang, H.; Wang, X. Imaging of the Internal Structure of Permafrost in the Tibetan Plateau Using Ground Penetrating Radar. Electronics 2020, 9, 56. https://doi.org/10.3390/electronics9010056
Wang Y, Fu Z, Lu X, Qin S, Wang H, Wang X. Imaging of the Internal Structure of Permafrost in the Tibetan Plateau Using Ground Penetrating Radar. Electronics. 2020; 9(1):56. https://doi.org/10.3390/electronics9010056
Chicago/Turabian StyleWang, Yao, Zhihong Fu, Xinglin Lu, Shanqiang Qin, Haowen Wang, and Xiujuan Wang. 2020. "Imaging of the Internal Structure of Permafrost in the Tibetan Plateau Using Ground Penetrating Radar" Electronics 9, no. 1: 56. https://doi.org/10.3390/electronics9010056
APA StyleWang, Y., Fu, Z., Lu, X., Qin, S., Wang, H., & Wang, X. (2020). Imaging of the Internal Structure of Permafrost in the Tibetan Plateau Using Ground Penetrating Radar. Electronics, 9(1), 56. https://doi.org/10.3390/electronics9010056