High-Accuracy Parameter Identification Method for Equivalent-Circuit Models of Lithium-Ion Batteries Based on the Stochastic Theory Response Reconstruction



Abstract
:1. Introduction
2. Battery Model and Parameter Identification
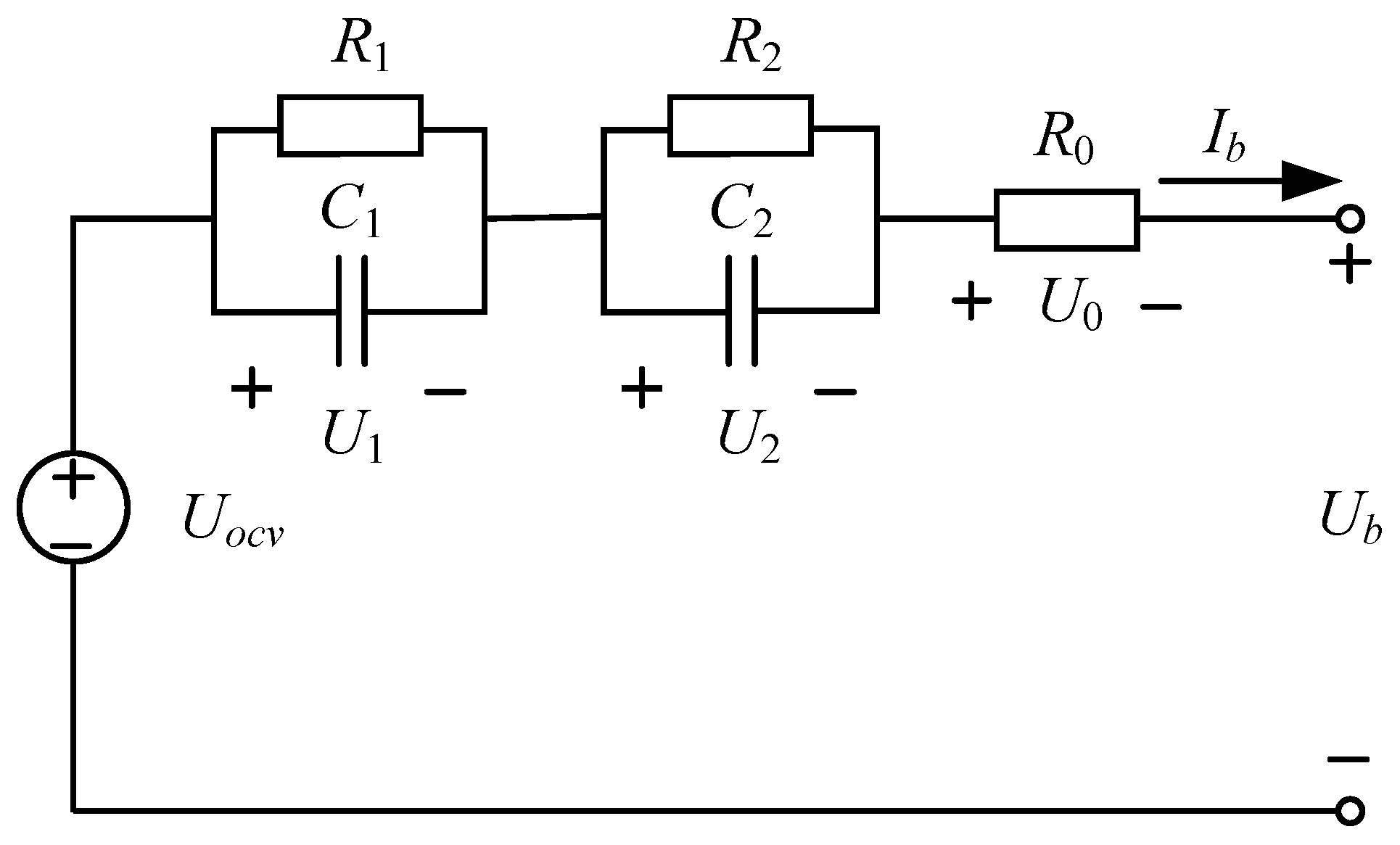
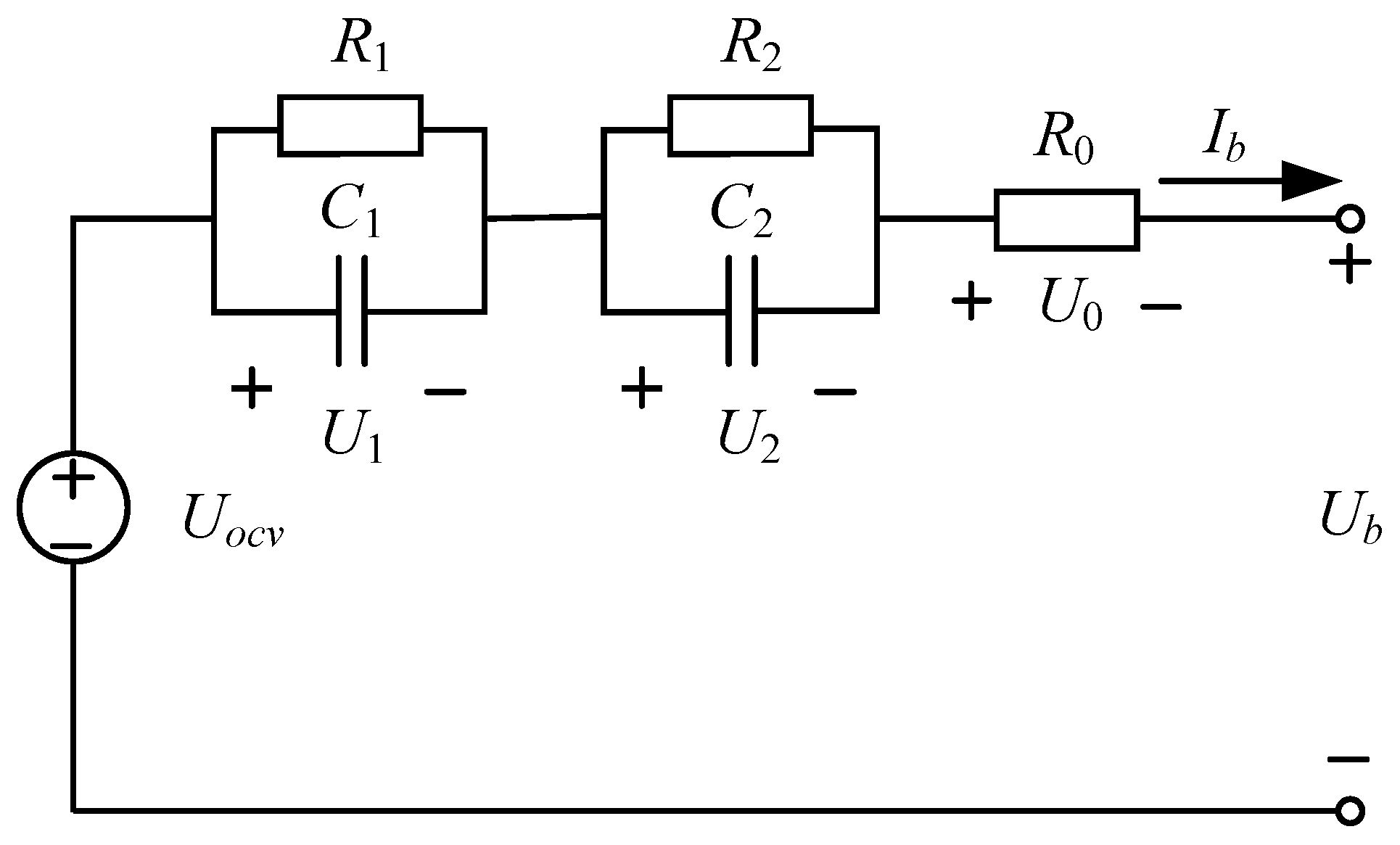
2.1. The Second-Order ECM of Lithium-Ion Battery
2.2. Parameter Identification Based on RLS
3. The Reconstruction Method of Battery Voltage
4. Experiment Setup
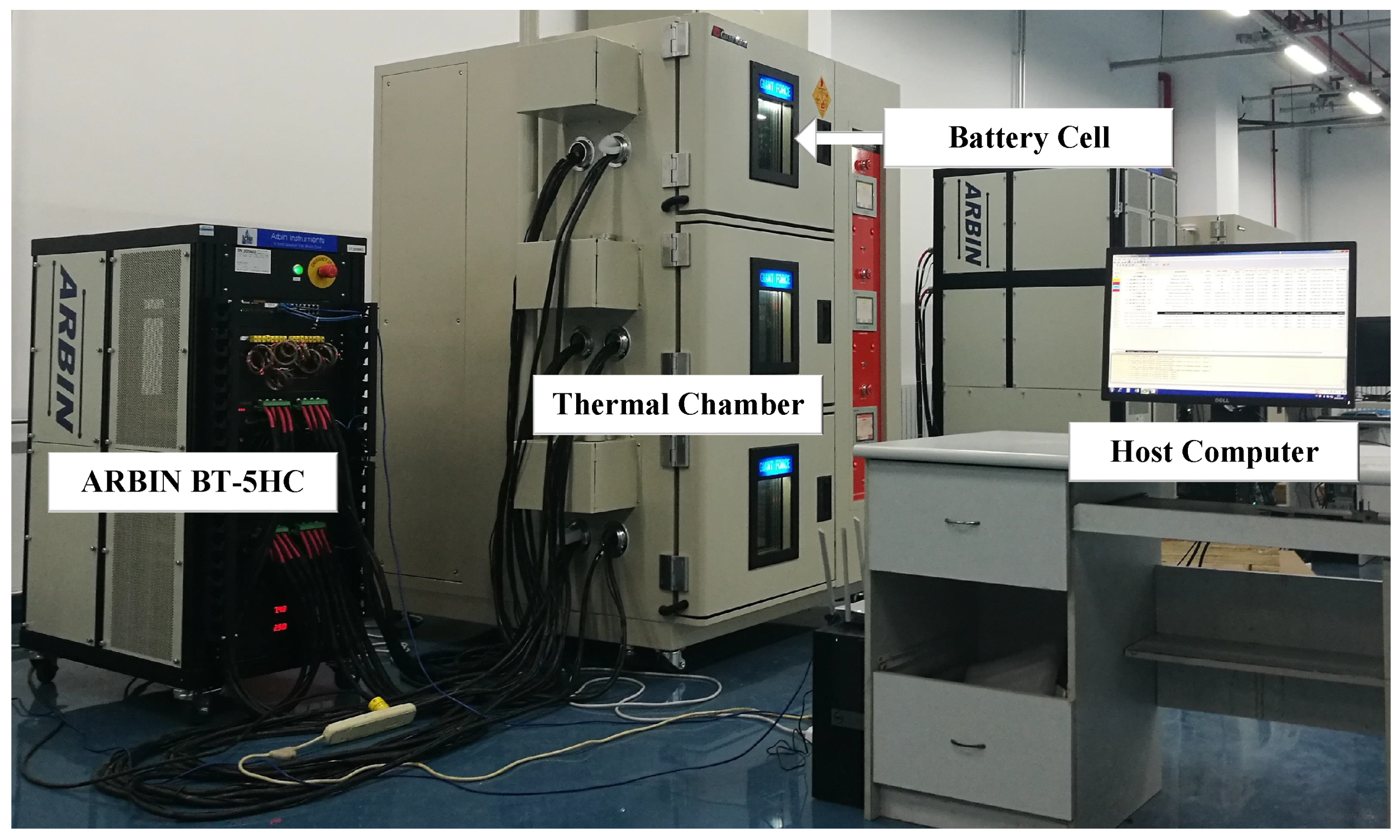
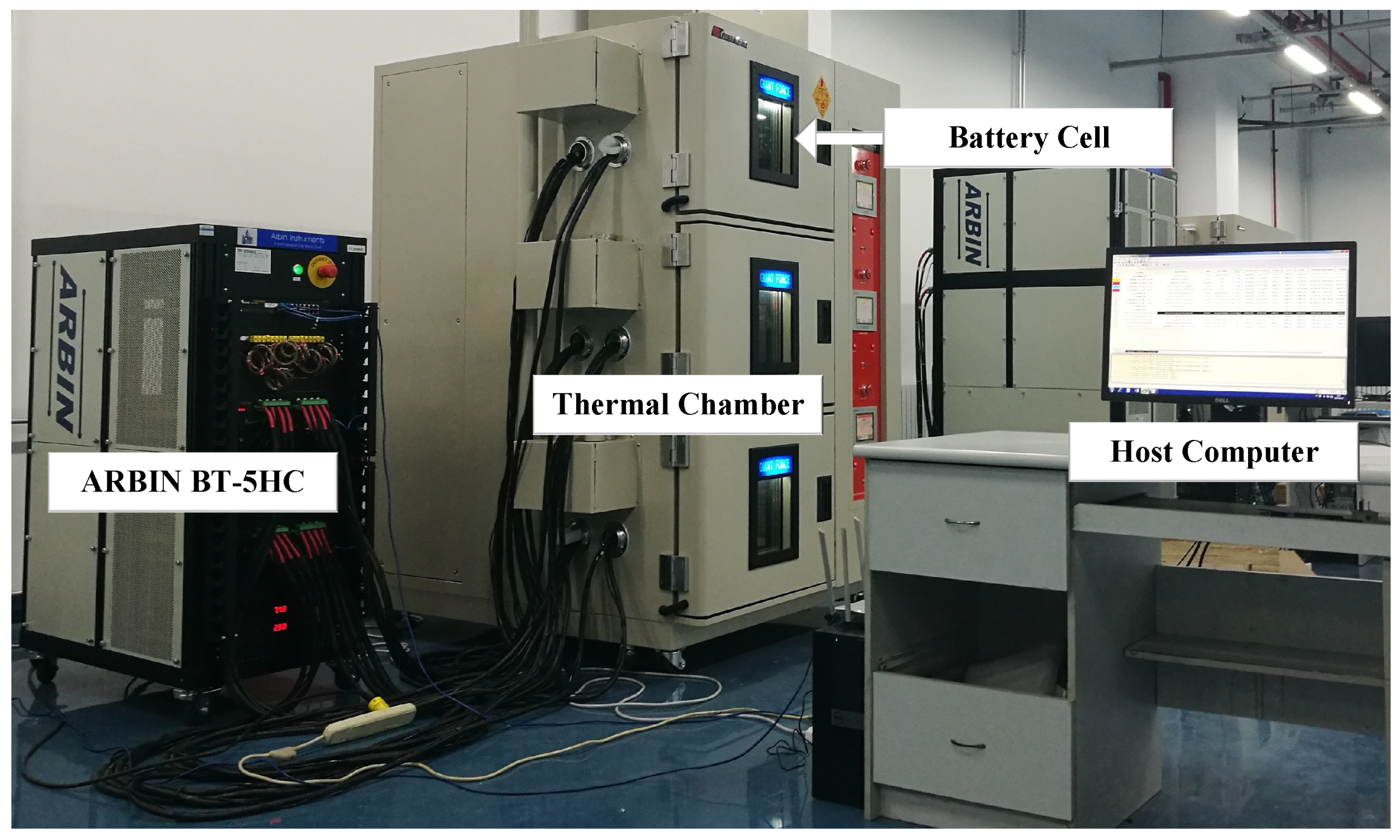
4.1. Battery Test Bench Setup
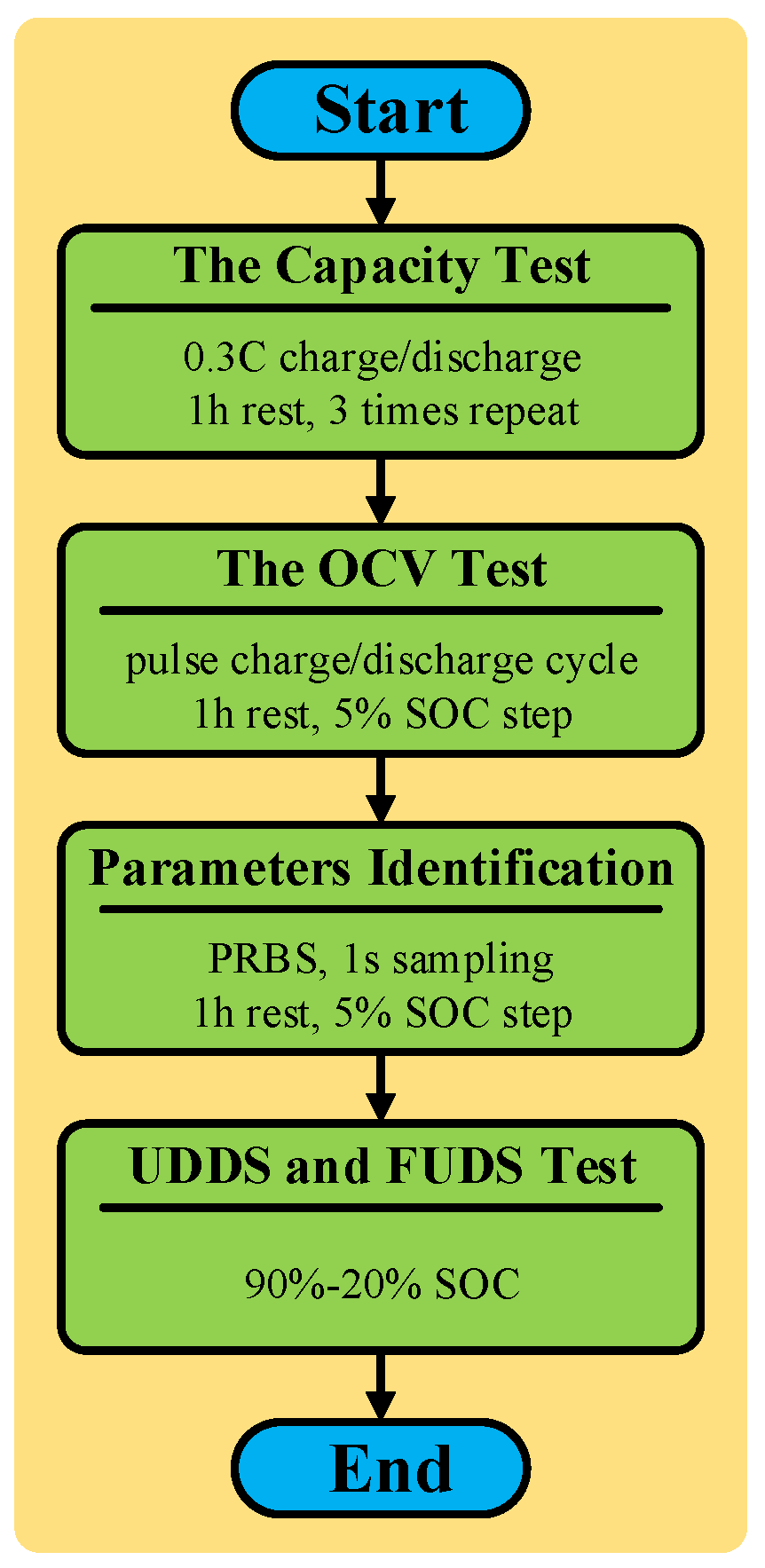
4.2. Battery Cell Test Scheme
- Charge the battery at 0.3 C constant current until the cell voltage reaches 4.2 V.
- Charge the battery with constant voltage 4.2 V until the current reduces to 0.02 C.
- Rest the battery for 1 h before discharging the battery cell.
- Discharge the battery at the 0.3 C constant current until the discharging cut-off voltage is reached.
- Repeat the above procedure three times, adopting the average value as the battery cell capacity.
- Charge the battery to fully charged state.
- Discharge the battery 5% of the available capacity with the 0.3 C constant current.
- Rest the battery for 1 h.
- Repeat the above discharging and rest process until the battery discharging cut-off voltage is reached.
- Take the opposite current for the charging process.
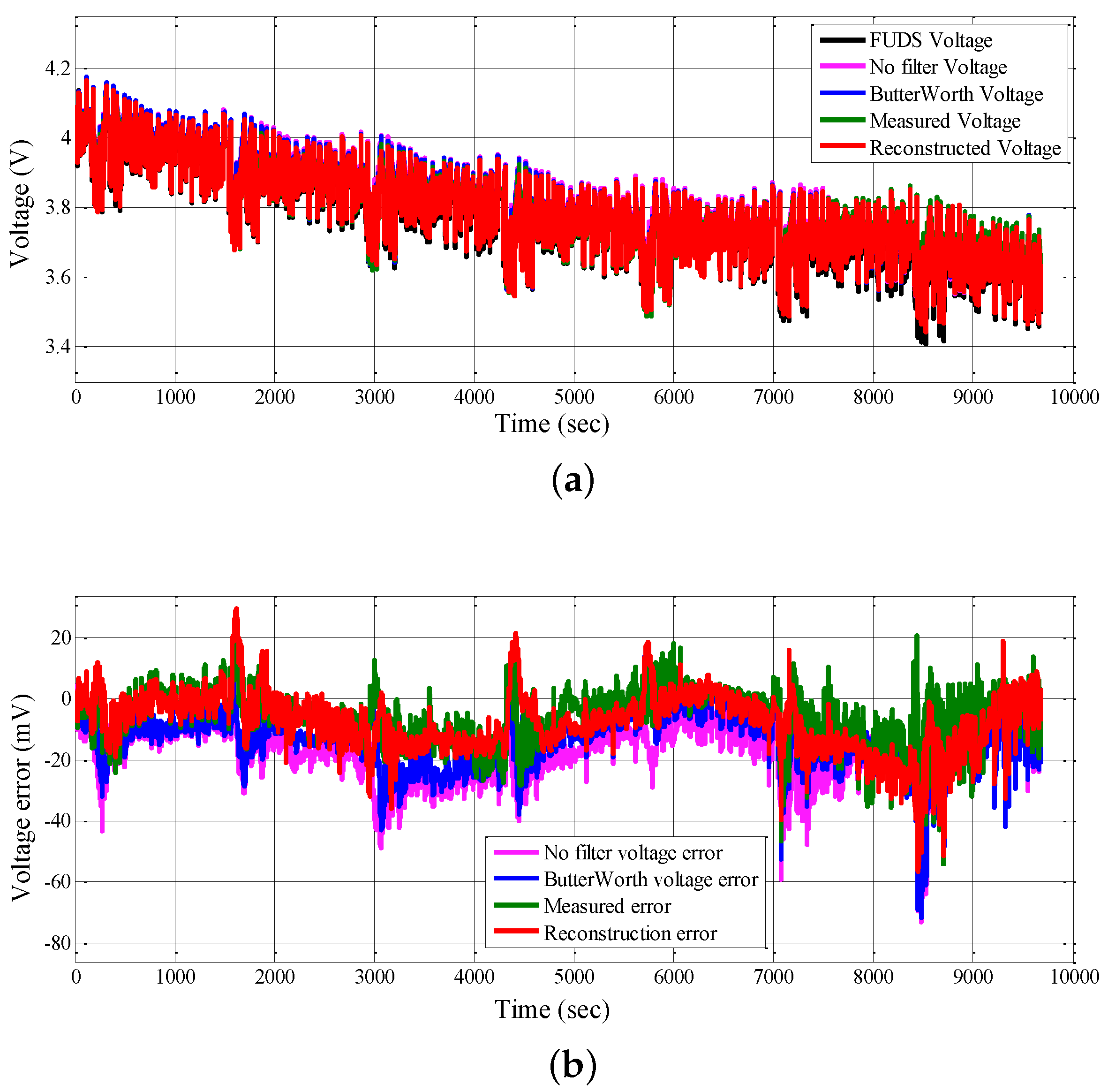
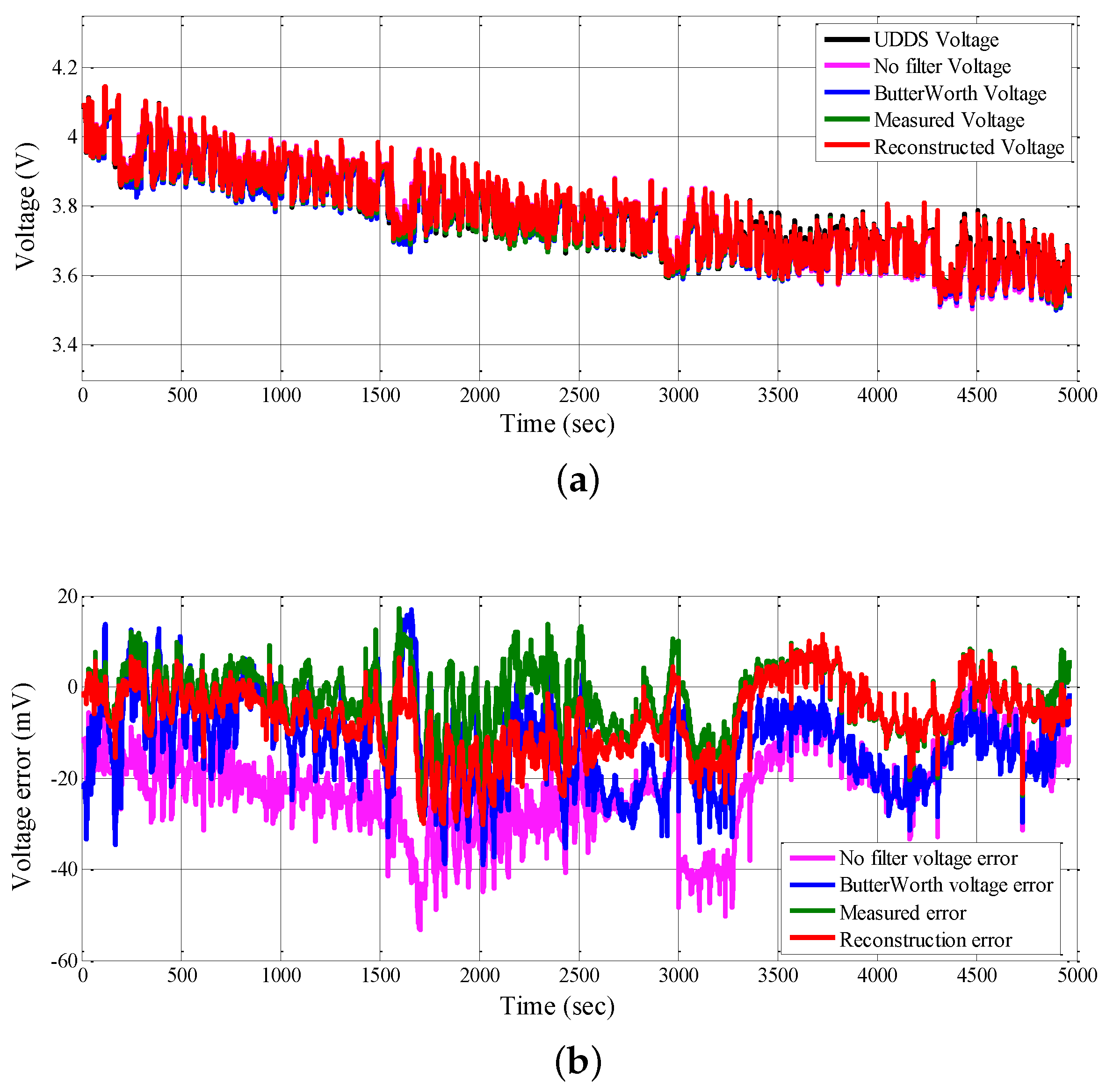
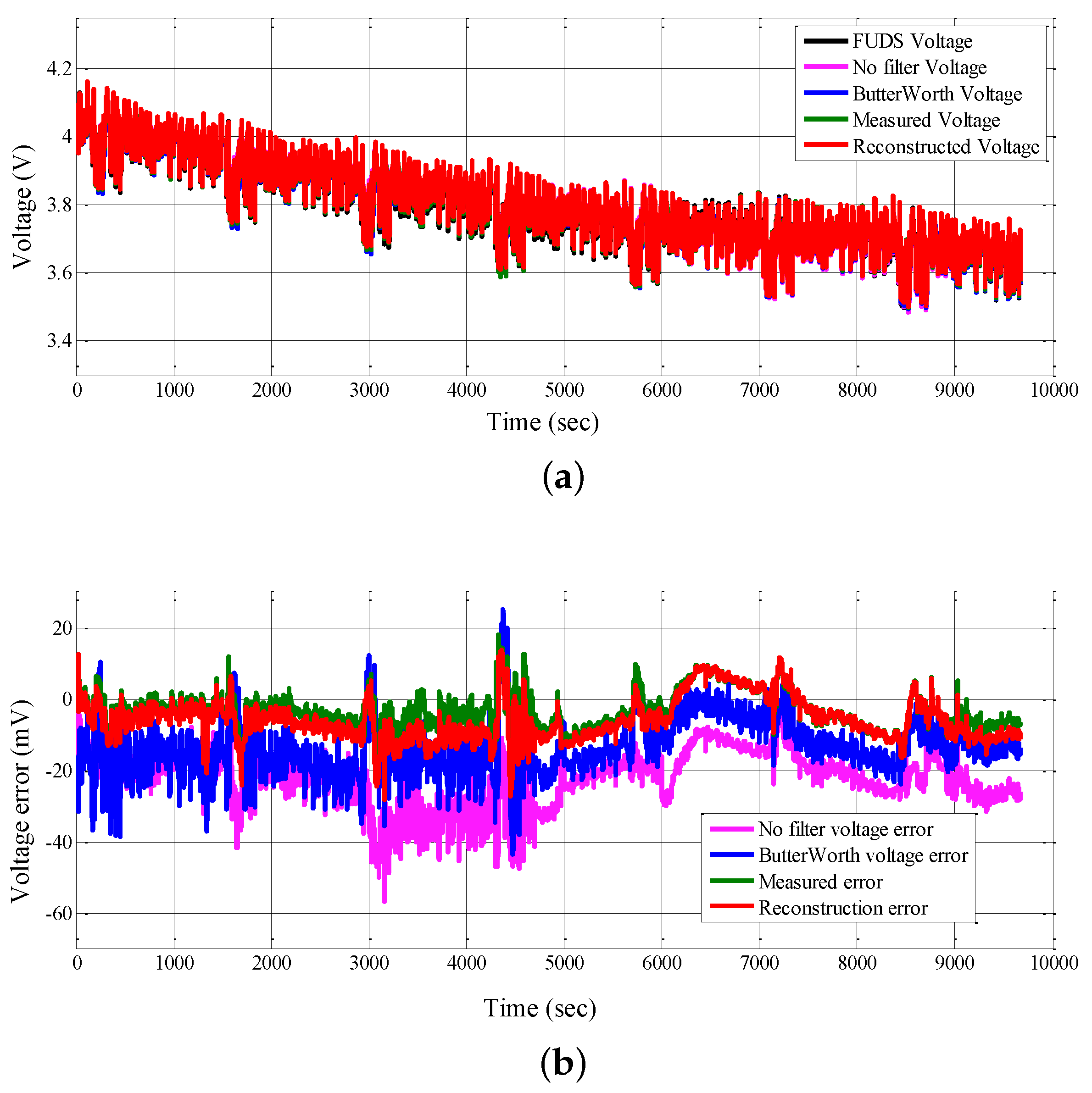
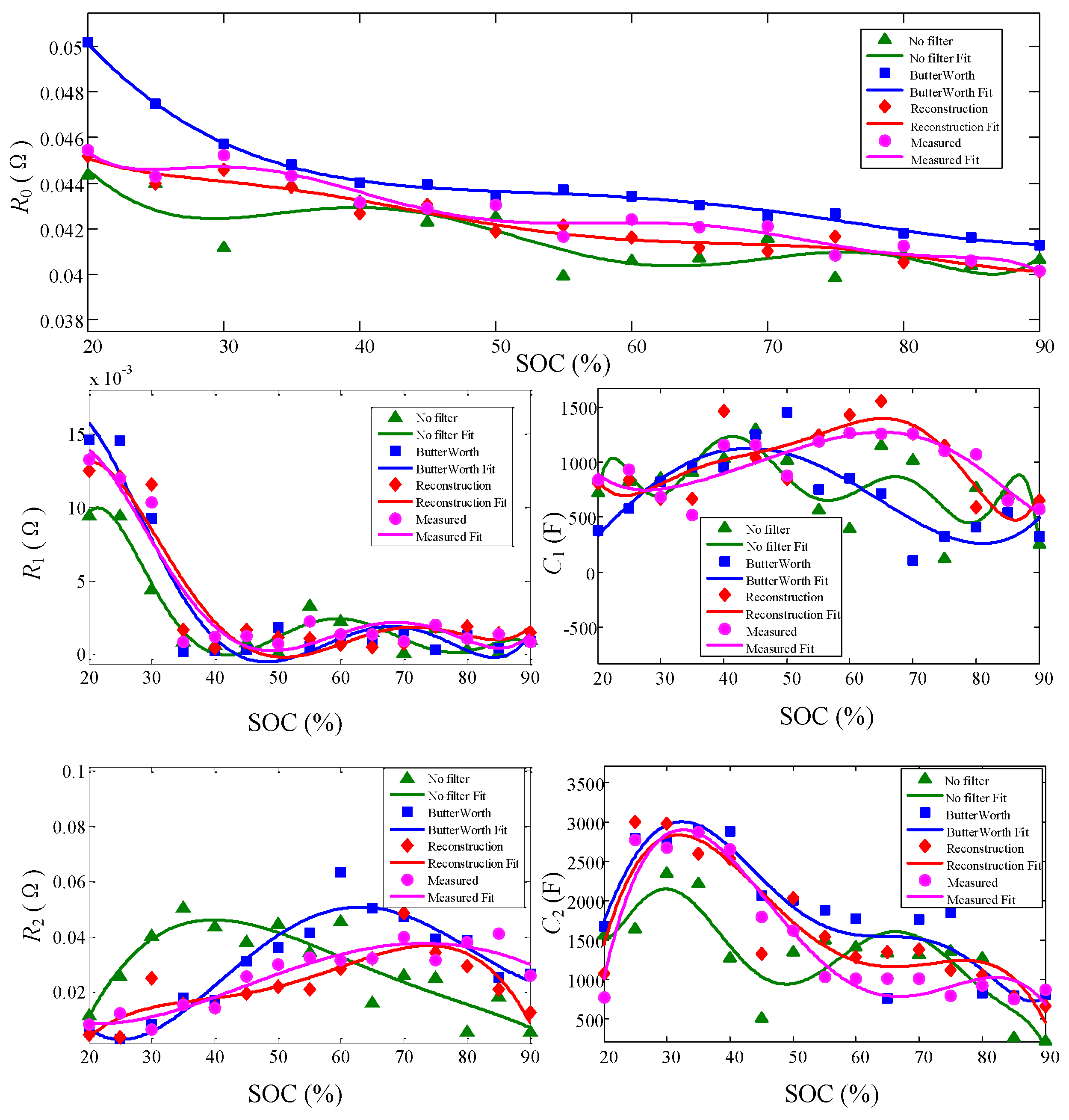
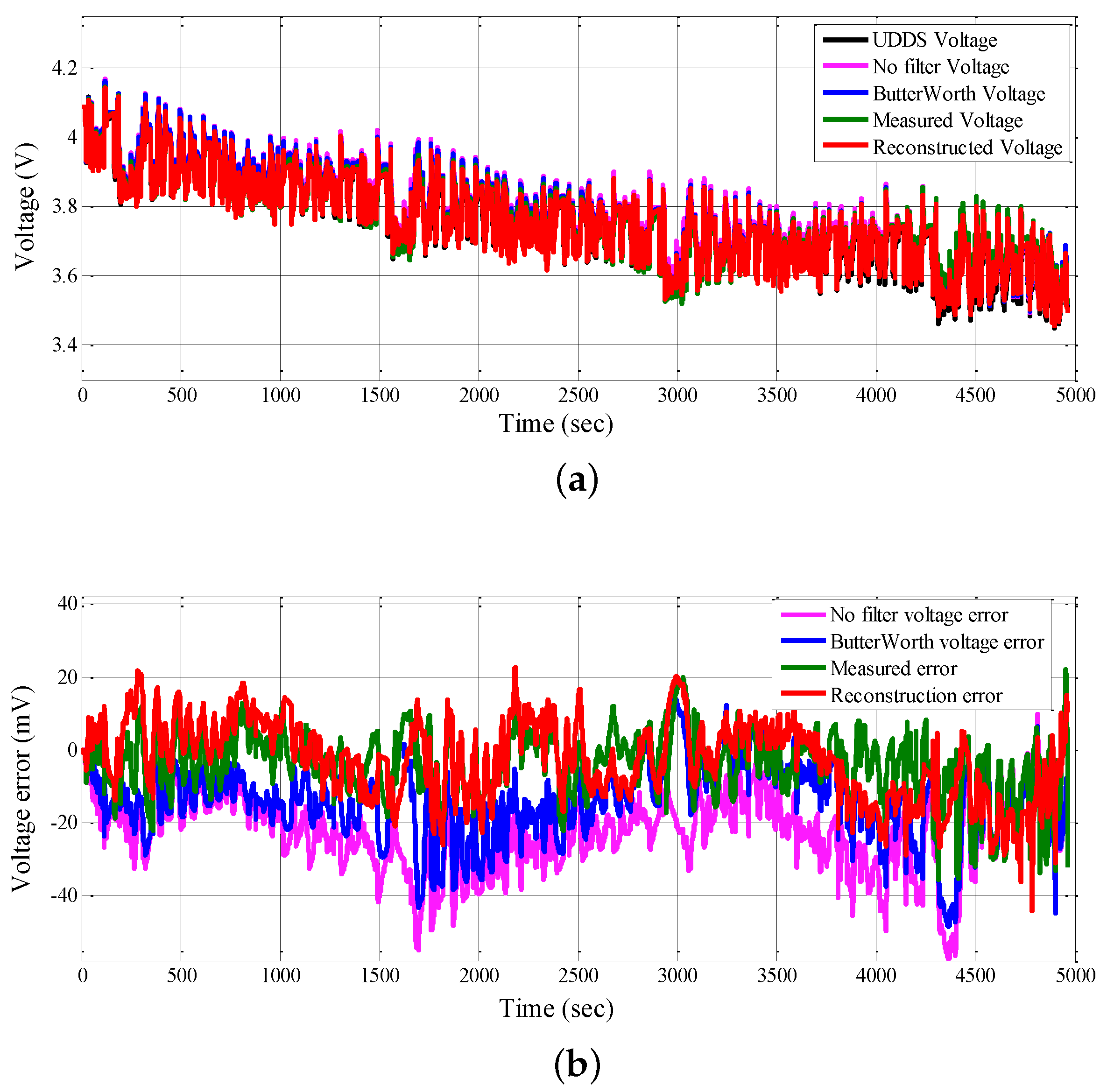
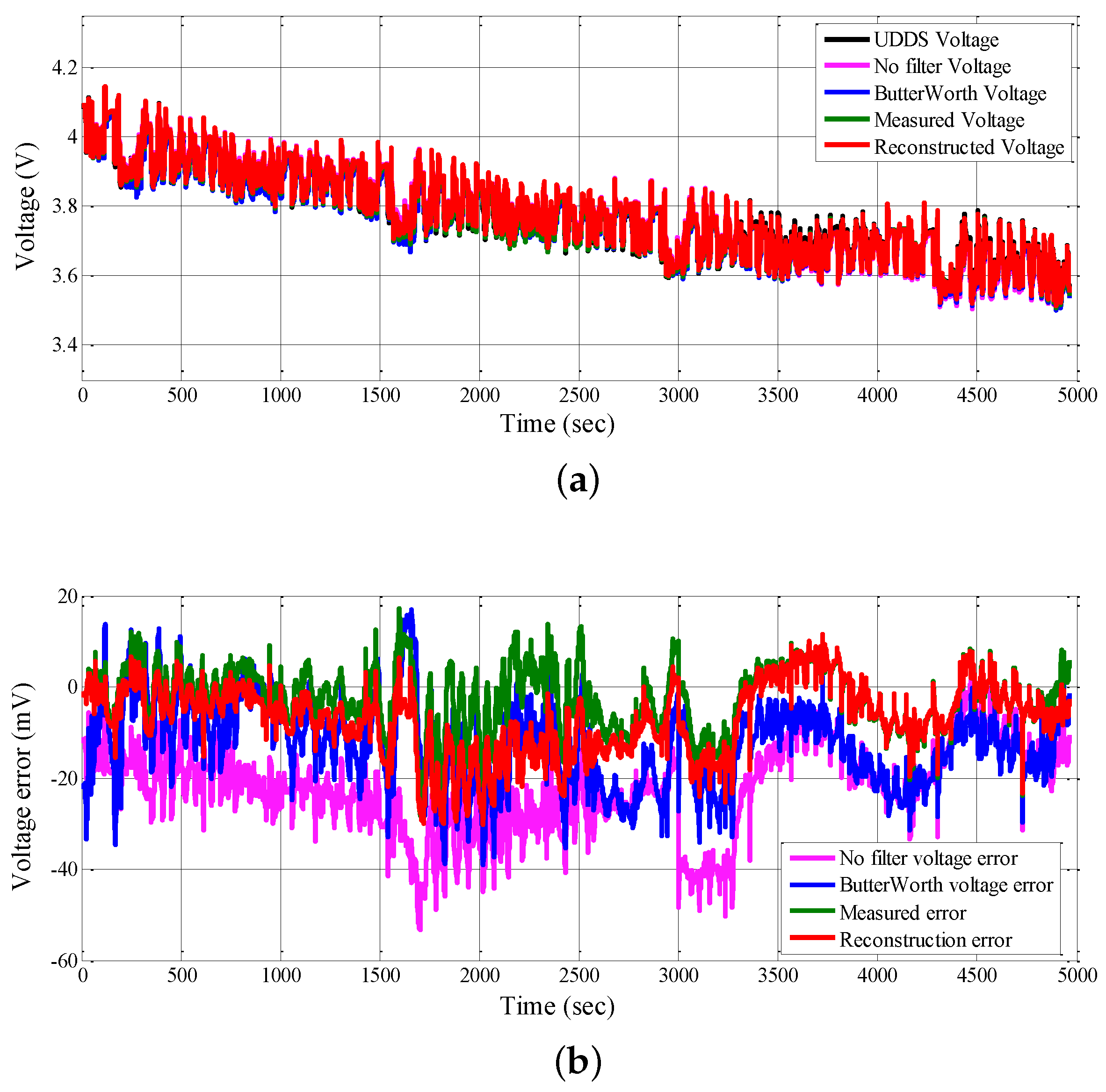
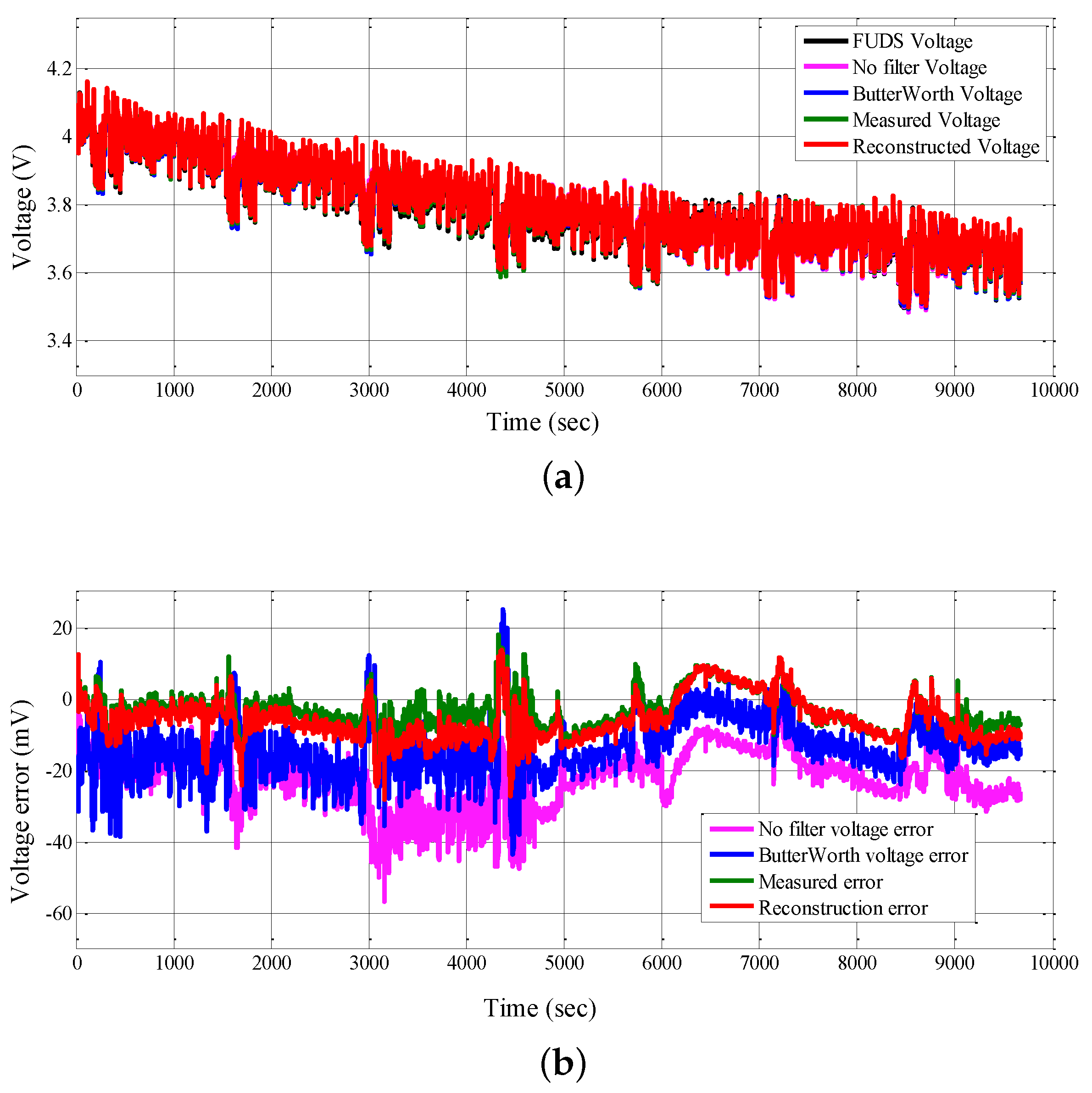
5. Experimental Results and Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| STRR | stochastic theory response reconstruction |
| ECM | equivalent circuit model |
| DC | direct current |
| AC | alternating current |
| EIS | electrochemical impedance spectroscopy |
| RLS | recursive least squares |
| PRBS | pseudo random binarysequence |
| UDDS | Urban Dynamometer Driving Schedule |
| FUDS | Federal Urban Driving Schedule |
| EVs | electric vehicles |
| BMS | battery management ststem |
| SOC | state of charge |
| SOH | state of health |
| SOP | state of power |
| OCV | open circuit voltage |
| MAE | mean absolute error |
| RMSE | mean absolute error |
References
- Lievre, A.; Sari, A.; Venet, P.; Hijazi, A.; Ouattarabrigaudet, M.; Pelissier, S. Practical online estimation of lithium-ion battery apparent series resistance for mild hybrid vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4505–4511. [Google Scholar] [CrossRef]
- Xia, B.; Chen, C.; Tian, Y.; Wang, M.; Sun, W.; Xu, Z. State of charge estimation of lithium-ion batteries based on an improved parameter identification method. Energy 2015, 90, 1426–1434. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Shang, Y.; Zhang, Q.; Cui, N.; Zhang, C. A cell-to-cell equalizer based on three-resonant-state switched-capacitor converters for series-connected battery strings. Energies 2017, 10, 206. [Google Scholar] [CrossRef]
- Gao, Z.; Chin, C.; Chiew, J.; Jia, J.; Zhang, Z. Design and Implementation of a Smart Lithium-Ion Battery System with Real-Time Fault Diagnosis Capability for Electric Vehicles. Energies 2017, 10, 1503. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Rivera-Barrera, J.P.; Muñoz-Galeano, N.; Sarmiento-Maldonado, H.O. SoC estimation for lithium-ion batteries: Review and future challenges. Electronics 2017, 6, 102. [Google Scholar] [CrossRef]
- Lai, X.; Yi, W.; Zheng, Y.; Zhou, L. An all-region state-of-charge estimator based on global particle swarm optimization and improved extended kalman filter for lithium-ion batteries. Electronics 2018, 7, 321. [Google Scholar] [CrossRef]
- Ko, S.T.; Ahn, J.H.; Lee, B.K. Enhanced equivalent circuit modeling for li-ion battery using recursive parameter correction. J. Electr. Eng. Technol. 2018, 13, 1147–1155. [Google Scholar]
- Zhou, Y.; Huang, M. On-board capacity estimation of lithium-ion batteries based on charge phase. J. Electr. Eng. Technol. 2018, 13, 733–741. [Google Scholar]
- Kim, T.; Qiao, W. A hybrid battery model capable of capturing dynamic circuit characteristics and nonlinear capacity effects. IEEE Trans. Energy Convers. 2011, 26, 1172–1180. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H.; Li, S. Comparison study on the battery models used for the energy management of batteries in electric vehicles. Energy Convers. Manag. 2012, 64, 113–121. [Google Scholar] [CrossRef]
- Manwell, J.; McGowan, J. Lead acid battery storage model for hybrid energy systems. Sol. Energy 1993, 50, 399–405. [Google Scholar] [CrossRef]
- Zhu, R.; Duan, B.; Zhang, C.; Gong, S. Accurate lithium-ion battery modeling with inverse repeat binary sequence for electric vehicle applications. Appl. Energy 2019, 251, 113339. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, Y.; Shang, Y.; Duan, B.; Cui, N.; Zhang, C. A fractional-Order kinetic battery model of lithium-Ion batteries considering a nonlinear capacity. Electronics 2019, 8, 394. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Zhang, C.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Gao, Z.; Chin, C.; Toh, W.; Chiew, J.; Jia, J. State-of-Charge Estimation and Active Cell Pack Balancing Design of Lithium Battery Power System for Smart Electric Vehicle. J. Adv. Transp. 2017, 2017, 6510747. [Google Scholar] [CrossRef]
- Gao, Z.; Chin, C.; Woo, W.; Jia, J. Integrated Equivalent Circuit and Thermal Model for Simulation of Temperature-Dependent LiFePO4 Battery in Actual Embedded Application. Energies 2017, 10, 85. [Google Scholar] [CrossRef]
- Orcioni, S.; Buccolini, L.; Ricci, A.; Conti, M. Lithium-ion Battery Electrothermal Model, Parameter Estimation, and Simulation Environment. Energies 2017, 10, 375. [Google Scholar] [CrossRef]
- Rumpf, K.; Naumann, M.; Jossen, A. Experimental investigation of parametric cell-to-cell variation and correlation based on 1100 commercial lithium-ion cells. J. Energy Storage 2017, 14, 224–243. [Google Scholar] [CrossRef]
- Barai, A.; Uddin, K.; Dubarry, M.; Somerville, L.; McGordon, A.; Jennings, P.; Bloom, I. A comparison of methodologies for the non-invasive characterisation of commercial Li-ion cells. Prog. Energy Combust. Sci. 2019, 72, 1–37. [Google Scholar] [CrossRef]
- Hessam, M.; Alexey, P.; Ole, M. Joint unscented Kalman filter for state and parameter estimation in managed pressure drilling. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1645–1650. [Google Scholar]
- Dai, H.; Wei, X.; Sun, Z.; Wang, J.; Gu, W. Online cell SOC estimation of Li-ion battery packs using a dual time-scale Kalman filtering for EV applications. Appl. Energy 2012, 95, 227–237. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Yang, D.; Chen, Z. An on-line estimation of battery pack parameters and state-of-charge using dual filters based on pack model. Energy 2016, 115, 219–229. [Google Scholar] [CrossRef]
- Pei, L.; Zhu, C.; Wang, T.; Lu, R.; Chan, C. Online peak power prediction based on a parameter and state estimator for lithium-ion batteries in electric vehicles. Energy 2014, 66, 766–778. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.; Gong, X.; Gao, C. A data-driven based adaptive state of charge estimator of lithium-ion polymer battery used in electric vehicles. Appl. Energy 2014, 113, 1421–1433. [Google Scholar] [CrossRef]
- Guo, X.; Kang, L.; Yao, Y.; Huang, Z.; Li, W. Joint estimation of the electric vehicle power battery state of charge based on the least squares method and the kalman filter algorithm. Energies 2016, 9, 100. [Google Scholar] [CrossRef]
- Song, Z.; Ho, J.; Hofmann, H.; Lin, X.; Sun, J. Parameter identification and maximum power estimation of battery/supercapacitor hybrid energy storage system based on cramer-rao bound analysis. IEEE Trans. Power Electron. 2019, 34, 4831–4843. [Google Scholar] [CrossRef]
- Allafi, W.; Uddin, K.; Zhang, C.; Sha, R.; Marco, J. On-line scheme for parameter estimation of nonlinear lithium ion battery equivalent circuit models using the simplified refined instrumental variable method for a modified Wiener continuous-time model. Appl. Energy 2017, 204, 497–508. [Google Scholar] [CrossRef]
- Zhang, Z.; Cheng, X.; Lu, Z. SOC estimation of lithium-Ion batteries with AEKF and wavelet transform matrix. IEEE Trans. Power Electron. 2017, 32, 7626–7634. [Google Scholar] [CrossRef]
- Huang, C.; Chow, T.; Chow, M. Li-ion battery parameter identification with low pass filter for measurement noise rejection. In Proceedings of the 26th IEEE International Symposium on Industrial Electronics, Edinburgh, UK, 18–21 Jun 2017; pp. 2075–2080. [Google Scholar]
- Baronti, F.; Zamboni, W.; Femia, N.; Rahimi-Eichi, H.; Roncella, R.; Rosi, S.; Saletti, R.; Chow, M. Parameter identification of Li-Po batteriesin electric vehicles: A comparative study. In Proceedings of the 2013 IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013. [Google Scholar]
- Liaw, B.Y.; Nagasubramanian, G.; Jungst, R.G.; Doughty, D.H. Modeling of lithium ion cells—A simple equivalent-circuit model approach. Solid State Ion. 2004, 175, 835–839. [Google Scholar]
- Liaw, B.Y.; Dubarry, M. From driving cycle analysis to understanding battery performance in real-life electric hybrid vehicle operation. J. Power Sources 2007, 174, 76–88. [Google Scholar] [CrossRef]
- Andre, D.; Meiler, M.; Steiner, K.; Wimmer, C.; Soczka-Guth, T.; Sauer, D.U. Characterization of high-power lithium-ion batteries by electrochemical impedance spectroscopy. I. Experimental investigation. J. Power Sources 2011, 196, 5334–5341. [Google Scholar] [CrossRef]
- Blanco, C.; Sánchez, L.; González, M.; Antón, J.C.; García, V.; Viera, J.C. An equivalent circuit model with variable effective capacity for lifepo4 batteries. IEEE Trans. Veh. Technol. 2014, 63, 3592–3599. [Google Scholar] [CrossRef]
- Hu, Y.; Yurkovich, S. Linear parameter varying battery model identification using subspace methods. J. Power Sources 2011, 196, 2913–2923. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Nominal Capacity (Ah) | Nominal Voltage (V) | Discharge Cut-Off Voltage (V) | Charge Cut-Off Voltage (V) |
|---|---|---|---|---|
| 18650 | 2.5 | 3.6 | 3 | 4.2 |
| Method | UDDS | FUDS | ||||
|---|---|---|---|---|---|---|
| MAE [mV] | RMSE [mV] | ME [mV] | MAE [mV] | RMSE [mV] | ME [mV] | |
| No filter | 22.6 | 24.8 | 57.5 | 17.6 | 19.9 | 73.2 |
| ButterWorth | 14.9 | 17.7 | 51.6 | 13.9 | 16.6 | 71.9 |
| Measured | 7.1 | 9.4 | 35.5 | 7.7 | 10.3 | 54.7 |
| Reconstruction | 8.9 | 10.9 | 44.2 | 9.6 | 12.2 | 56.7 |
| Method | UDDS | FUDS | ||||
|---|---|---|---|---|---|---|
| MAE [mV] | RMSE [mV] | ME [mV] | MAE [mV] | RMSE [mV] | ME [mV] | |
| No filter | 22.4 | 24.3 | 53.3 | 22 | 23.3 | 56.3 |
| Butterworth | 13.4 | 15.6 | 39 | 13.8 | 15.3 | 43.4 |
| Measured | 5.6 | 7.1 | 28.3 | 5.3 | 6.3 | 23.9 |
| Reconstruction | 8.1 | 10.3 | 30 | 7.1 | 8.2 | 27.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, F.; Duan, B.; Zhang, C.; Zhu, R.; Shang, Y.; Zhang, J. High-Accuracy Parameter Identification Method for Equivalent-Circuit Models of Lithium-Ion Batteries Based on the Stochastic Theory Response Reconstruction. Electronics 2019, 8, 834. https://doi.org/10.3390/electronics8080834
Wen F, Duan B, Zhang C, Zhu R, Shang Y, Zhang J. High-Accuracy Parameter Identification Method for Equivalent-Circuit Models of Lithium-Ion Batteries Based on the Stochastic Theory Response Reconstruction. Electronics. 2019; 8(8):834. https://doi.org/10.3390/electronics8080834
Chicago/Turabian StyleWen, Fazheng, Bin Duan, Chenghui Zhang, Rui Zhu, Yunlong Shang, and Junming Zhang. 2019. "High-Accuracy Parameter Identification Method for Equivalent-Circuit Models of Lithium-Ion Batteries Based on the Stochastic Theory Response Reconstruction" Electronics 8, no. 8: 834. https://doi.org/10.3390/electronics8080834
APA StyleWen, F., Duan, B., Zhang, C., Zhu, R., Shang, Y., & Zhang, J. (2019). High-Accuracy Parameter Identification Method for Equivalent-Circuit Models of Lithium-Ion Batteries Based on the Stochastic Theory Response Reconstruction. Electronics, 8(8), 834. https://doi.org/10.3390/electronics8080834