An LVRT Scheme for Grid Connected DFIG Based WECS Using State Feedback Linearization Control Technique

 , , ,
, , ,
Abstract
1. Introduction
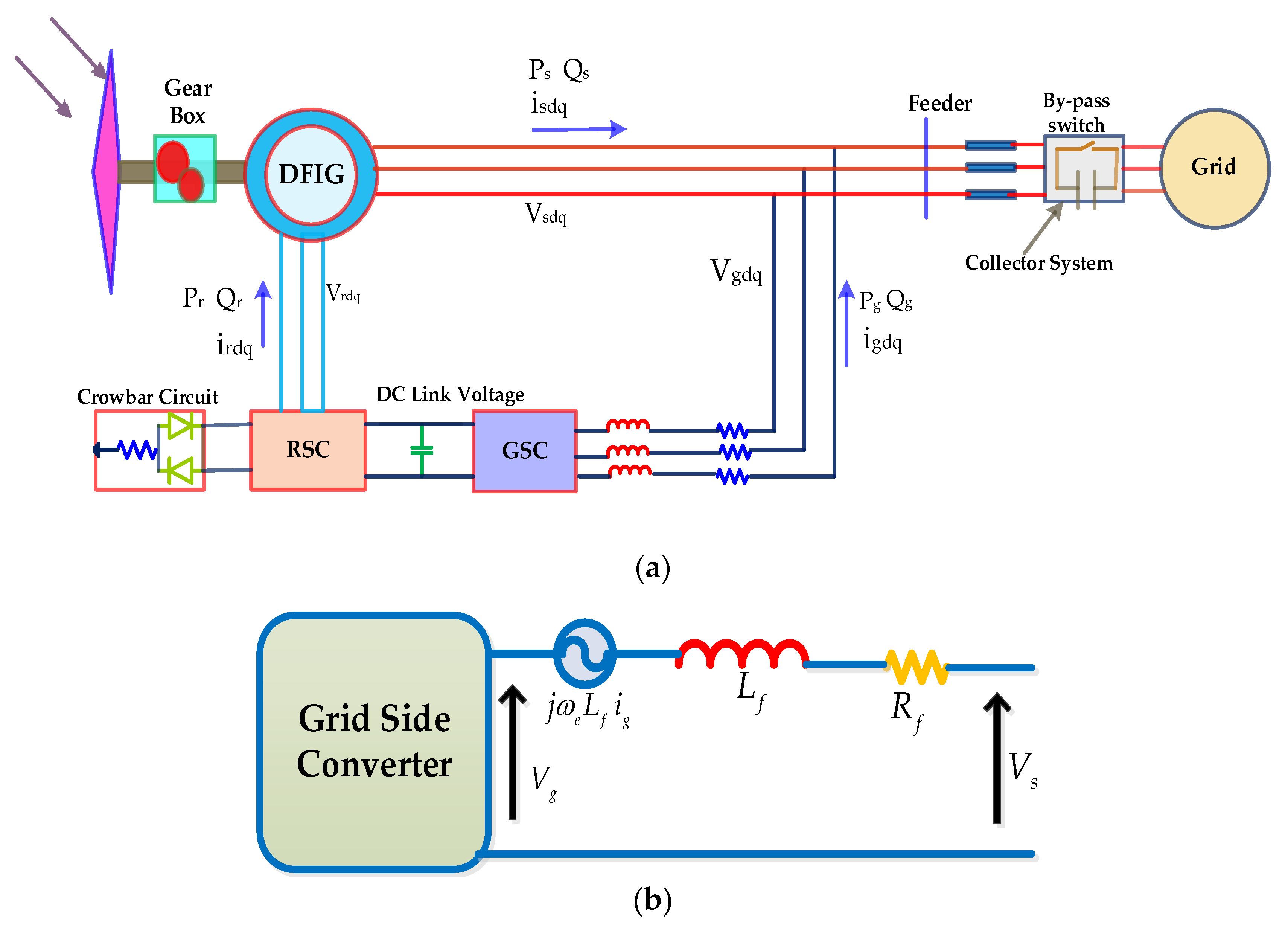
2. Dynamic Model of DFIG WTs in dq Reference Frame
2.1. Dynamic Modeling of DFIG
2.2. Grid-Side Converterand Filter Model
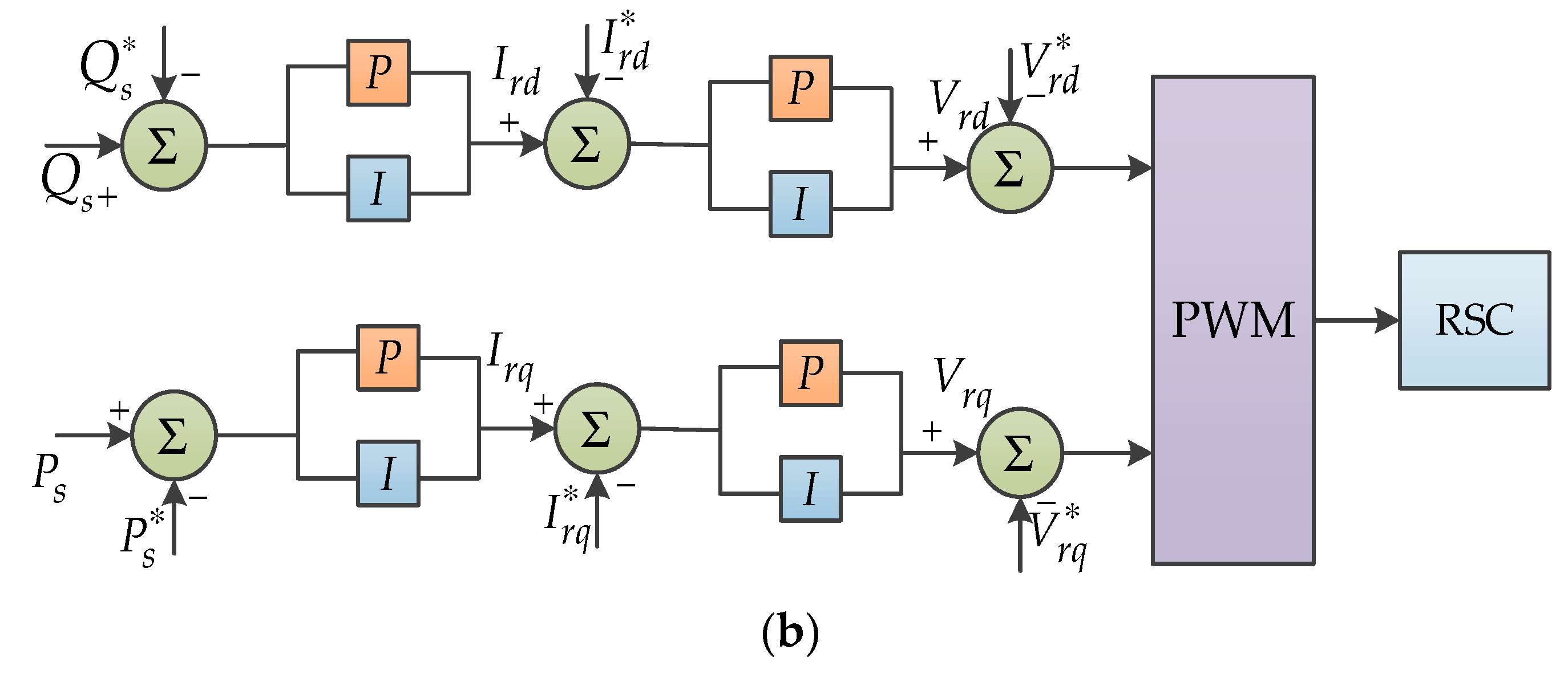
3. Conventional PI Controller Design
4. Proposed Control Strategy
4.1. Mathematical Modeling of Proposed Control Scheme
4.2. Short Circuit Current Behavior
4.3. Crowbar Protection
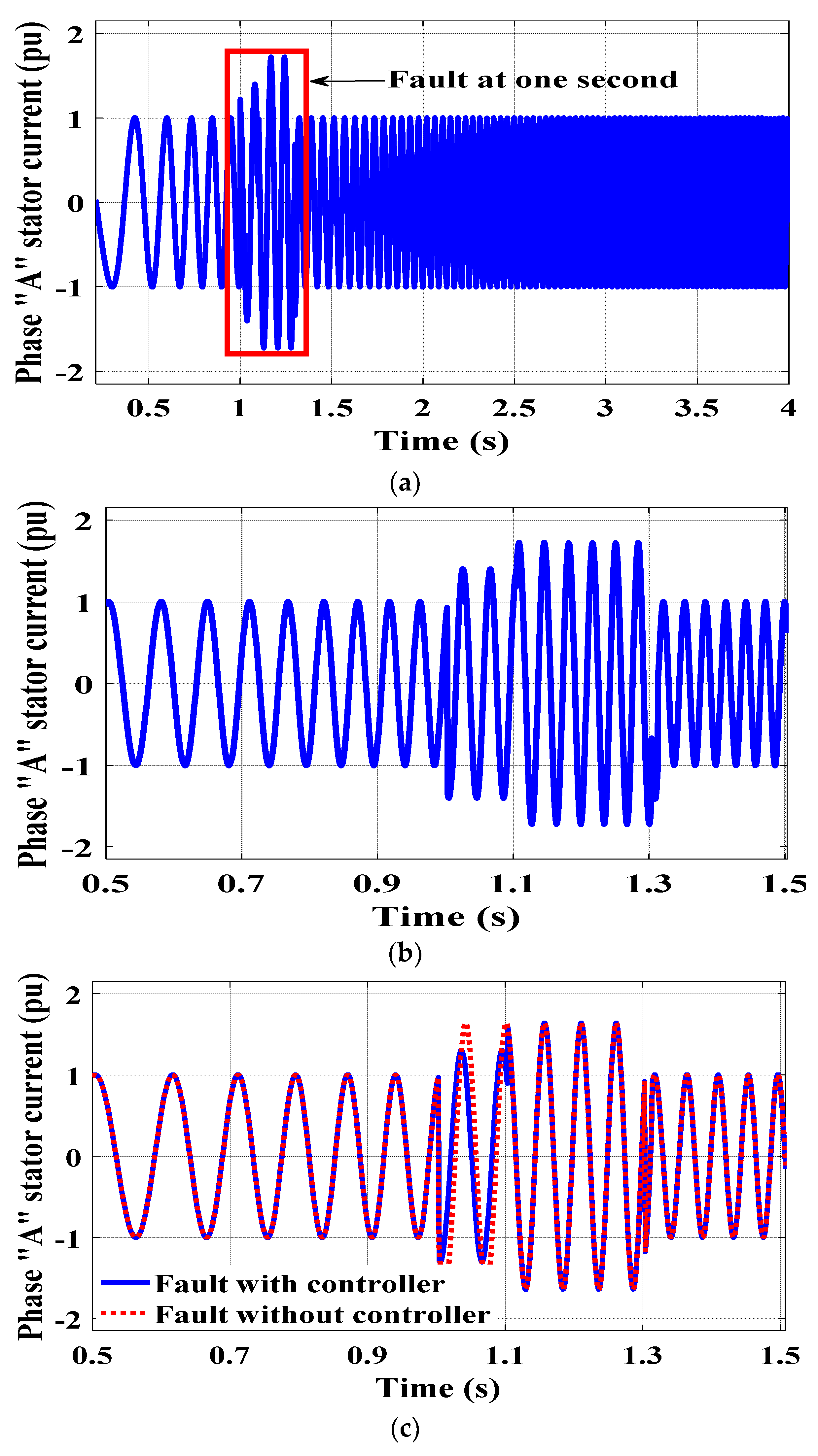
5. Simulations Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hussain Baloch, M.; Ishak, D.; Tahir Chaudary, S.; Ali, B.; Asghar Memon, A.; Ahmed Jumani, T. Wind Power Integration: An Experimental Investigation for Powering Local Communities. Energies 2019, 12, 621. [Google Scholar] [CrossRef]
- Baloch, M.H.; Wang, J.; Kaloi, G.S.; Memon, A.A.; Larik, A.S.; Sharma, P. Techno-Economic Analysis of Power Generation from a Potential Wind Corridor of Pakistan: An Overview. Environ. Prog. Sustain. Energy 2019, 38, 706–720. [Google Scholar] [CrossRef]
- Baloch, M.H.; Chauhdary, S.T.; Ishak, D.; Kaloi, G.S.; Nadeem, M.H.; Wattoo, W.A.; Younas, T.; Hamid, H.T. Hybrid Energy Sources Status of Pakistan: An Optimal Technical Proposal to Solve the Power Crises Issues. Energy Strategy Rev. 2019, 24, 132–153. [Google Scholar] [CrossRef]
- Baloch, M.; Abro, S.; Sarwar Kaloi, G.; Mirjat, N.; Tahir, S.; Nadeem, M.; Gul, M.; Memon, Z.; Kumar, M. A Research on Electricity Generation from Wind Corridors of Pakistan (Two Provinces): A Technical Proposal for Remote Zones. Sustainability 2017, 9, 1611. [Google Scholar] [CrossRef]
- Ko, H.S.; Yoon, G.G.; Kyung, N.H.; Hong, W.P. Modeling and control of DFIG-based variable-speed wind-turbine. Electr. Power Syst. Res. 2008, 78, 1841–1849. [Google Scholar] [CrossRef]
- Wang, S.; Chen, N.; Yu, D.; Foley, A.; Zhu, L.; Li, K.; Yu, J. Flexible fault ride through strategy for wind farm clusters in power systems with high wind power penetration. Energy Convers. Manag. 2008, 93, 239–248. [Google Scholar] [CrossRef]
- Qiao, W.; Zhou, W.; Aller, J.M.; Harley, R.G. Wind speed estimation based sensorless output maximization control for a wind turbine driving a DFIG. IEEE Trans. Power Electron. 2008, 23, 1156–1169. [Google Scholar] [CrossRef]
- Huang, X.-b.; Lin, D.; Wang, H.-f.; Lu, N. Low voltage ride through strategy with reactive current injection for grid connected photovoltaic system. J. Mech. Electr. Eng. 2016, 33, 458–463. [Google Scholar]
- Ouyang, J.; Xiong, X. Research on the short-circuit current of doubly fed induction generator under non-deep voltage drop. Electr. Power Syst. Res. 2014, 107, 158–166. [Google Scholar] [CrossRef]
- Tang, Y.; He, H.; Ni, Z.; Wen, J.; Sui, X. Reactive power control of grid-connected wind farm based on adaptive dynamic programming. Neurocomputing 2014, 125, 125–133. [Google Scholar] [CrossRef]
- Li, S. Reliability models for DFIGs considering topology change under different control strategies and components data change under adverse operation environments. Renew. Energy 2013, 57, 144–150. [Google Scholar] [CrossRef]
- Song, Y.; Nian, H. Modularized control strategy and performance analysis of DFIG system under unbalanced and harmonic grid voltage. IEEE Trans. Power Electron. 2015, 30, 4831–4842. [Google Scholar] [CrossRef]
- Nasr-Azadani, E.; Canizares, C.; Olivares, D.E.; Bhattacharya, K. Stability Analysis of Unbalanced Distribution Systems With Synchronous Machine and DFIG Based Distributed Generators. IEEE Trans. Smart Grid 2014, 5, 2326–2338. [Google Scholar] [CrossRef]
- Tahir, S.; Wang, J.; Baloch, M.; Kaloi, G. Digital Control Techniques Based on Voltage Source Inverters in Renewable Energy Applications: A Review. Electronics 2018, 7, 18. [Google Scholar] [CrossRef]
- Tahir, S.; Wang, J.; Kaloi, G.S.; Baloch, M.H. Robust digital deadbeat control design technique for 3 phase VSI with disturbance observer. IEICE Electron. Express 2017, 14, 20170351. [Google Scholar] [CrossRef]
- Rahimi, M.; Parniani, M. Low voltage ride-through capability improvement of DFIG-based wind turbines under unbalanced voltage dips. Int. J. Electr. Power Energy Syst. 2014, 60, 82–95. [Google Scholar] [CrossRef]
- Liu, M.; Pan, W.; Quan, R.; Li, H.; Liu, T.; Yang, G. A Short-Circuit Calculation Method for DFIG-Based Wind Farms. IEEE Access 2018, 6, 52793–52800. [Google Scholar] [CrossRef]
- Morren, J.; de Haan, S.W. Short-circuit current of wind turbines with doubly fed induction generator. IEEE Trans. Energy Convers. 2007, 22, 174–180. [Google Scholar] [CrossRef]
- Fathabadi, H. Control of a DFIG-based wind energy conversion system operating under harmonically distorted unbalanced grid voltage along with nonsinusoidal rotor injection conditions. Energy Convers. Manag. 2014, 84, 60–72. [Google Scholar] [CrossRef]
- Howard, D.F.; Liang, J.; Harley, R.G. Short-Circuit Modeling of DFIGs With Uninterrupted Control. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 47–57. [Google Scholar] [CrossRef]
- Yu, S.S.; Zhang, G.; Fernando, T.; Iu, H.H. A DSE-Based SMC Method of Sensorless DFIG Wind Turbines Connected to Power Grids for Energy Extraction and Power Quality Enhancement. IEEE Access 2018, 6, 76596–76605. [Google Scholar] [CrossRef]
- Howard, D.F.; Habetler, T.G.; Harley, R.G. Improved sequence network model of wind turbine generators for short-circuiting studies. IEEE Trans. Energy Convers. 2012, 27, 968–977. [Google Scholar] [CrossRef]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M. High-order sliding-mode control of variable-speed wind turbines. IEEE Trans. Ind. Electron. 2009, 56, 3314–3321. [Google Scholar] [CrossRef]
- Erlich, I.; Wrede, H.; Feltes, C. Dynamic behavior of DFIG-based wind turbines during grid faults. IEEJ Trans. Ind. Appl. 2008, 128, 396–401. [Google Scholar] [CrossRef]
- Sarasúa, J.I.; Pérez-Díaz, J.I.; Wilhelmi, J.R.; Sánchez-Fernández, J.Á. Dynamic response and governor tuning of a long penstock pumped-storage hydropower plant equipped with a pump-turbine and a doubly fed induction generator. Energy Convers. Manag. 2015, 106, 151–164. [Google Scholar] [CrossRef]
- Chandrasekar, S.; Gokaraju, R. Dynamic Phasor Modeling of Type 3 DFIG Wind Generators (Including SSCI Phenomenon) for Short-Circuit Calculations. IEEE Trans. Power Deliv. 2015, 30, 887–897. [Google Scholar] [CrossRef]
- Meegahapola, L.; Perera, S. Capability constraints to mitigate voltage fluctuations from DFIG wind farms when delivering ancillary services to the network. Int. J. Electr. Power Energy Syst. 2014, 62, 152–162. [Google Scholar] [CrossRef]
- Slotine, J.-J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Burgos, R.P.; Wiechmann, E.P.; Holtz, J. Complex state-space modeling and nonlinear control of active front-end converters. IEEE Trans. Ind. Electron. 2005, 52, 363–377. [Google Scholar] [CrossRef]
- Mohammadi, J.; Afsharnia, S.; Vaez-Zadeh, S. Efficient fault-ride-through control strategy of DFIG-based wind turbines during the grid faults. Energy Convers. Manag. 2014, 78, 88–95. [Google Scholar] [CrossRef]
- Xiao, S.; Yang, G.; Zhou, H.; Geng, H. An LVRT control strategy based on flux linkage tracking for DFIG-based WECS. IEEE Trans. Ind. Electron. 2013, 60, 2820–2832. [Google Scholar] [CrossRef]
- Lu, M.; Chen, Y.; Zhang, D.; Su, J.; Kang, Y. Virtual Synchronous Control Based on Control Winding Orientation for Brushless Doubly Fed Induction Generator (BDFIG) Wind Turbines Under Symmetrical Grid Faults. Energies 2019, 12, 319. [Google Scholar] [CrossRef]
- Döşoğlu, M.K.; Güvenç, U.; Sönmez, Y.; Yılmaz, C. Enhancement of demagnetization control for low-voltage ride-through capability in DFIG-based wind farm. Electr. Eng. 2018, 100, 491–498. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Jung, J.W. Doubly-fed induction generator based wind turbines: A comprehensive review of fault ride-through strategies. Renew. Sustain. Energy Rev. 2015, 45, 447–467. [Google Scholar] [CrossRef]
- Zhu, R.; Chen, Z.; Tang, Y.; Deng, F.; Wu, X. Dual-loop control strategy for DFIG-based wind turbines under grid voltage disturbances. IEEE Trans. Power Electron. 2016, 31, 2239–2253. [Google Scholar] [CrossRef]
- Tohidi, S.; Behnam, M.I. A comprehensive review of low voltage ride through of doubly fed induction wind generators. Renew. Sustain. Energy Rev. 2016, 57, 412–419. [Google Scholar] [CrossRef]
- Huang, Q.; Zou, X.; Zhu, D.; Kang, Y. Scaled current tracking control for doubly fed induction generator to ride-through serious grid faults. IEEE Trans. Power Electron. 2015, 31, 2150–2165. [Google Scholar] [CrossRef]
- Saad, N.H.; Sattar, A.A.; Mansour, A.E.-A.M. Low voltage ride through of doubly-fed induction generator connected to the grid using sliding mode control strategy. Renew. Energy 2015, 80, 583–594. [Google Scholar] [CrossRef]
- Kamel, R.M. Effect of wind generation system types on Micro-Grid (MG) fault performance during both standalone and grid-connected modes. Energy Convers. Manag. 2014, 79, 232–245. [Google Scholar] [CrossRef]
- Baloch, M.H.; Wang, J.; Kaloi, G.S. Stability and nonlinear controller analysis of wind energy conversion system with random wind speed. Int. J. Electr. Power Energy Syst. 2016, 79, 75–83. [Google Scholar] [CrossRef]
- Kaloi, G.S.; Wang, J.; Baloch, M.H. Dynamic Modeling and Control of DFIG for Wind Energy Conversion System Using Feedback Linearization. J. Electr. Eng. Technol. 2015, 11, 1137–1146. [Google Scholar] [CrossRef]
- Kaloi, G.S.; Wang, J.; Baloch, M.H. Active and reactive power control of the doubly fed induction generator based on wind energy conversion system. Energy Rep. 2016, 2, 194–200. [Google Scholar] [CrossRef]
- Balogun, A.; Ojo, O.; Okafor, F. Decoupled Direct Control of Natural and Power Variables of Doubly Fed Induction Generator for Extended Wind Speed Range Using Feedback Linearization. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 226–237. [Google Scholar] [CrossRef]
- Abdul, H.M.; Mazhar, H.B.; Anwar, A.S.; Amir, M.S.; Zubair, A.M. Achieving High Input Power Factor for Critical Conduction Mode Buck-Buck/Boost Converter. IEEE Access J. 2018, 6, 79082–79093. [Google Scholar]
- Memon, A.A.; Shah, S.A.; Shah, W.; Baloch, M.H.; Kaloi, G.S.; Mirjat, N.H. A Flexible Mathematical Model for Dissimilar Operational Modes of a Switched Reluctance Machine. IEEE Access J. 2018, 6, 9643–9649. [Google Scholar] [CrossRef]
- Wu, X.; Ning, W.; Yin, T.; Yang, X.; Tang, Z. Robust design method for the SSDC of a DFIG based on the practical small-signal stability region considering multiple uncertainties. IEEE Access 2018, 6, 16696–16703. [Google Scholar] [CrossRef]
- Eissa, M. Protection techniques with renewable resources and smart grids—A survey. Renew. Sustain. Energy Rev. 2015, 52, 1645–1667. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Values | Symbol | Quantity | Values |
|---|---|---|---|---|---|
| Stator resistance | 1.4 m | Grid filter resistance | 0.04 | ||
| Rotor resistance | 0.99 m | Grid filter inductance | 0.001 H | ||
| Stator inductance | 0.08998 mH | Frequency | 50 Hz | ||
| Rotor inductance | 0.08208 mH | Wind speed | 12 m/s | ||
| Mutual inductance | 1.526 mH | Number of pole pairs | 3 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaloi, G.S.; Baloch, M.H.; Kumar, M.; Soomro, D.M.; Chauhdary, S.T.; Memon, A.A.; Ishak, D. An LVRT Scheme for Grid Connected DFIG Based WECS Using State Feedback Linearization Control Technique. Electronics 2019, 8, 777. https://doi.org/10.3390/electronics8070777
Kaloi GS, Baloch MH, Kumar M, Soomro DM, Chauhdary ST, Memon AA, Ishak D. An LVRT Scheme for Grid Connected DFIG Based WECS Using State Feedback Linearization Control Technique. Electronics. 2019; 8(7):777. https://doi.org/10.3390/electronics8070777
Chicago/Turabian StyleKaloi, Ghulam Sarwar, Mazhar Hussain Baloch, Mahesh Kumar, Dur Muhammad Soomro, Sohaib Tahir Chauhdary, Ali Asghar Memon, and Dahaman Ishak. 2019. "An LVRT Scheme for Grid Connected DFIG Based WECS Using State Feedback Linearization Control Technique" Electronics 8, no. 7: 777. https://doi.org/10.3390/electronics8070777
APA StyleKaloi, G. S., Baloch, M. H., Kumar, M., Soomro, D. M., Chauhdary, S. T., Memon, A. A., & Ishak, D. (2019). An LVRT Scheme for Grid Connected DFIG Based WECS Using State Feedback Linearization Control Technique. Electronics, 8(7), 777. https://doi.org/10.3390/electronics8070777