1. Introduction
A passive bistatic radar (PBR) system performs target detection and localization by exploiting noncooperative illuminators of opportunity. PBR offers many advantages over conventional monostatic radar systems, including lower cost, harder to detect, higher immunity to electronic countermeasures, no requirement for frequency allocation, and the ability to counter stealth targets due to the bistatic configuration of PBR systems. Therefore, many kinds of civil illuminators have been exploited by PBR systems, such as FM radio [
1], Integrated Services Digital Broadcasting-Terrestrial (ISDB-T) [
2], Digital Video Broadcasting-Terrestrial (DVB-T) [
3,
4,
5], Long-Term Evolution (LTE) [
6], Wireless Fidelity (Wi-Fi) [
7], and Global Navigation Satellite System (GNSS) [
8]. However, those communications signals are not designed for use in radar, which may cause ambiguities due to the signal structure [
9], and the maximum detectable range may be small due to the limited transmitting power.
Compared with civil illuminators, a dedicated radar transmitter usually transmits signals with a more ideal ambiguity function and higher transmitting power. German passive radar system Klein Heidelberg [
10] was the first PBR system based on existing hostile radar, and in recent years, some PBR systems which utilize existing radar as their transmitter have been proven to perform target detection successfully [
11,
12,
13]. Furthermore, phased array radar (PAR) has the advantages of stronger transmitting power and higher reliability. However, the complexity of PAR signals poses unique challenges to the signal processing of a PBR system, so PBR systems based on PAR signals still remains a broad area of research.
The exploited illuminator of our PBR system is a high-power air surveillance PAR, which is defined as cooperative but non-dedicated. It is cooperative in the sense that the information about signal waveform is available but is considered non-dedicated as its operations is solely for its own monostatic radar purposes and that no changes are applied to enhance PBR capabilities. The PAR adopts agile radar parameters to improve the anti-jamming ability. Liner frequency modulated (LFM) waveform is used as a transmitting signal. The PAR transmits a group of signals with the same carrier frequency (CF) and bandwidth (BW) for seconds; the CF and BW change randomly among different groups, while the pulse width (PW) and pulse repetition interval (PRI) are different among different pulses in each pulse group. The agility of the waveform parameters of transmitting signal brings two problems to the signal processing of our PBR system. The first problem is the time and frequency synchronization of the system, and the second problem is the coherent integration for moving target detection and weak target detection.
For the first problem, we use a reference channel to receive the direct wave signal and to estimate the parameters of the transmitted signal in real time to achieve time and frequency synchronization of the system. The parameters we need to estimate include BW, PW, CF, and time of arrival (TOA). To solve the problem of LFM signal detection and parameter estimation, many literatures have proposed many algorithms for different applications, such as Wigner–Hough transform [
14], Lv’s distribution [
15], and Ensemble Empirical Mode Decomposition-Fractional Fourier Transform (EEMD-FRFT) [
16]. Qian proposed a method based on generalized Radon Fourier transform for the parameter estimation of direct wave signal [
17], but it requires a lot of searching and calculation, which cannot be realized in real time. Since the PAR transmits a deterministic signal and the parameter template library of the signal waveform has been established in advance, we propose a direct wave parameter estimation method based on template matching to realize the time and frequency synchronization of the PBR system.
For the second problem, since the duration of a group of pulses with the same CF and BW is generally longer than a second and the coherent processing interval (CPI) for coherent integration will not exceed one second, we perform coherent integration for signals with the same CF and BW, while the PRI is random and PW is staggered. In recent years, many methods have been proposed for coherent integration, such as Keystone transform [
18], Radon Fourier transform (RFT) [
19], axis rotation moving target detection [
20], and scaled inverse Fourier transform [
21], which are only applicable for conventional radar. As for radar signals with random PRI and staggered PW, it can be concluded that the random PRI will introduce the problems of irregular range cell migration (RCM) and nonuniform phase fluctuations among different pulses and that the staggered PW will introduce the problem of the irregular range-Doppler coupling effect. The problem of nonuniform phase fluctuations among different pulses can be converted to the problem of spectral analysis of nonuniformly sampled complex-valued data. As for spectral analysis of nonuniformly sampled data, a method based on interpolation [
22,
23] cannot be applied when the Doppler frequency of the moving target is higher than the pulse repetition frequency of the radar. Li proposed a method based on nonuniform Fast Fourier Transform (NUFFT) for random PRI PD radar [
24], but the compensation of the irregular RCM is not covered in this paper. Tian proposed a method based on Radon nonuniform Fractional Fourier Transform (Radon-NUFrFT) for a random PRI radar [
25], but it is only applicable for periodic nonuniformly sampled signals, which cannot solve the non-periodic, nonuniform phase fluctuations and the irregular range-Doppler coupling effect. Pan proposed a method based on the Radon-iterative adaptive approach (Radon-IAA) [
26] to solve the problems introduced by the random PRI, but it requires a lot of iterative calculations, which is difficult to apply directly to engineering practice. Hence, we propose a method based on Radon-NUFFT to deal with the problems in the coherent integration for a radar signal with random PRI and staggered PW.
The remainder of this paper is organized as follows.
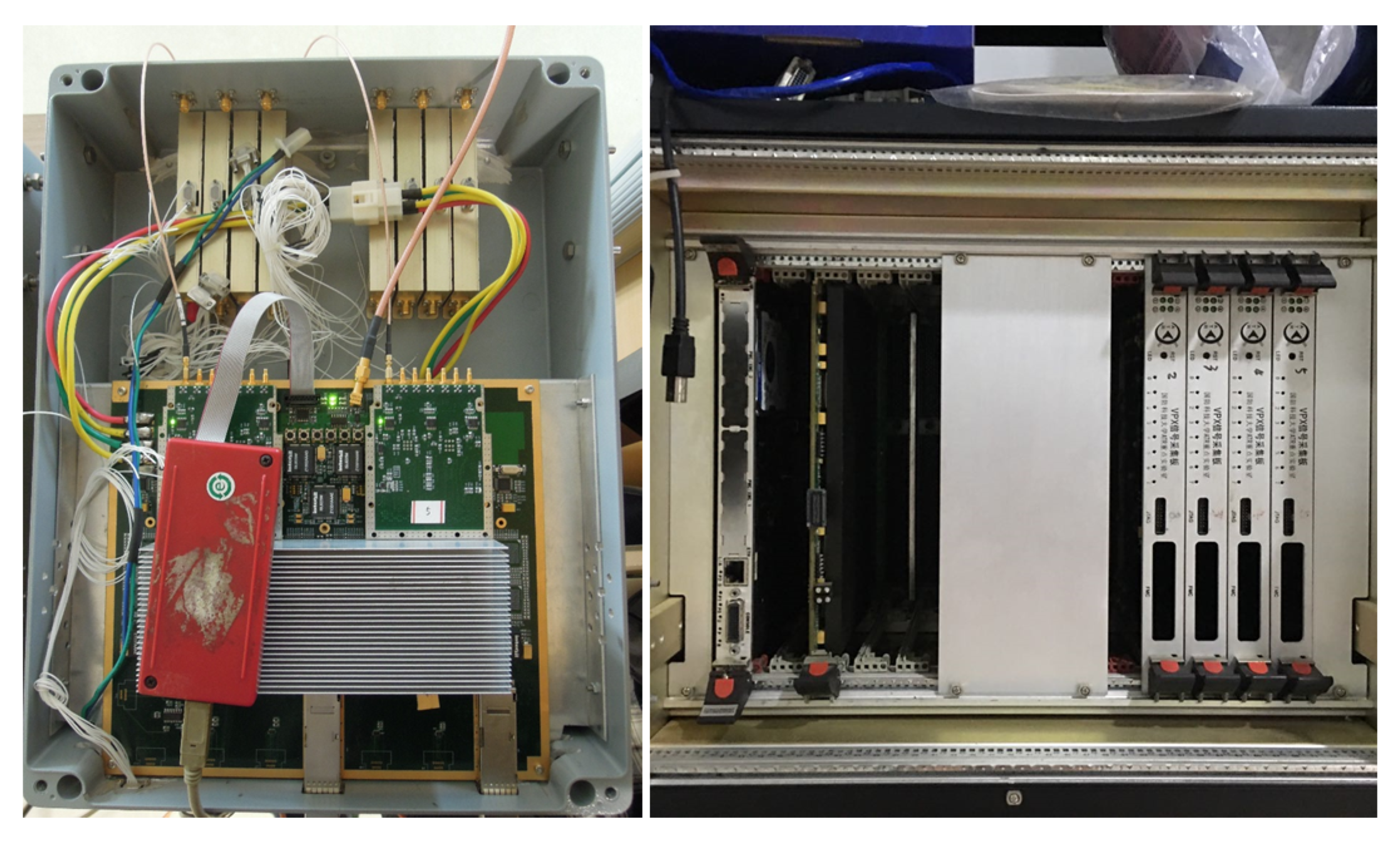
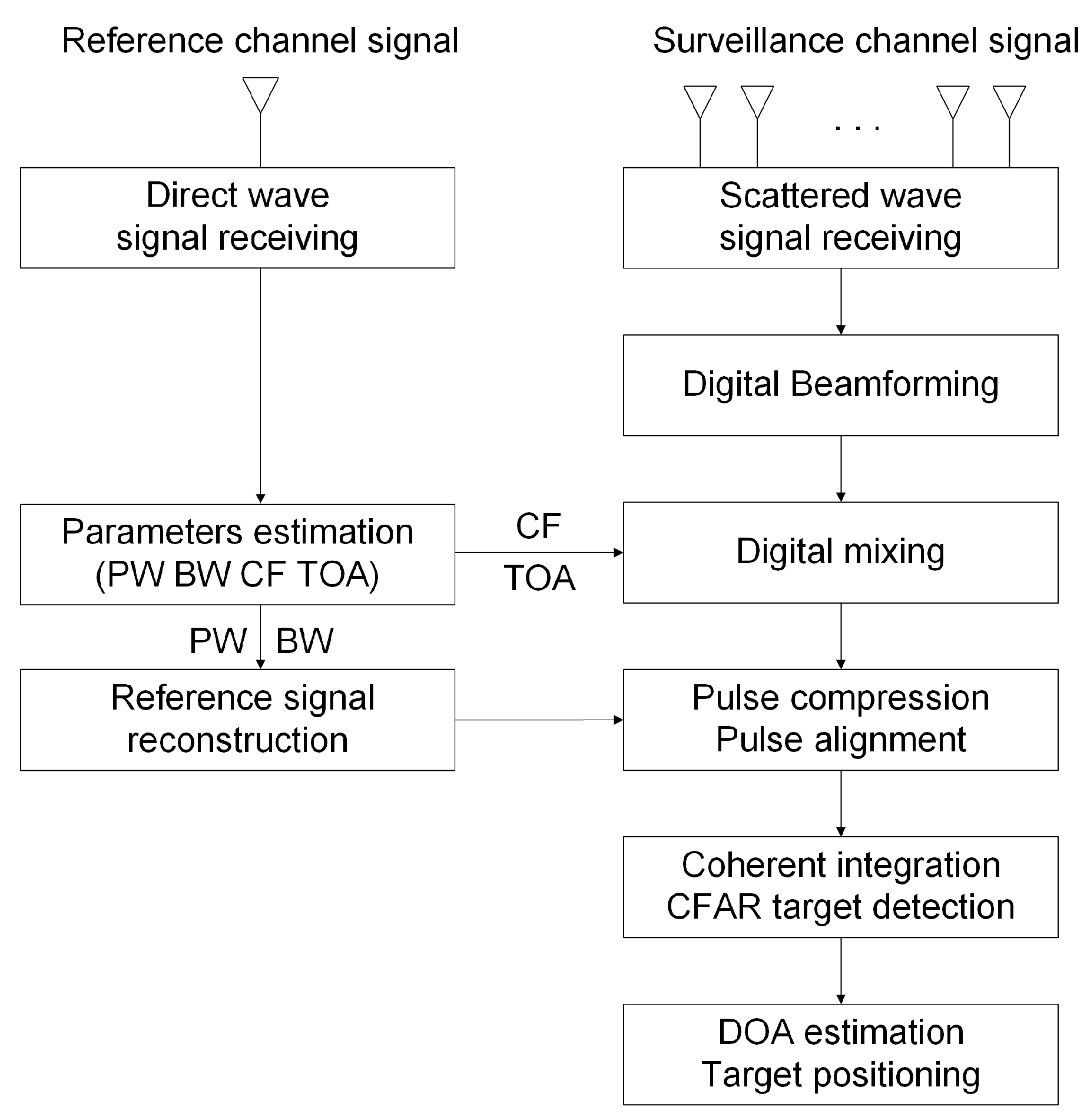
Section 2 introduces the PBR system in general, including the geometry, hardware, and signal processing flow of the PBR system.
Section 3 establishes the mathematical model of direct wave signal and describes the parameter estimation method based on template matching.
Section 4 establishes the mathematical model of echo signal of a moving target firstly; then, the coherent integration method based on Radon-NUFFT is described, and simulation results are performed.
Section 5 presents the experimental results to verify the performance of the PBR system.
Section 6 concludes the paper.
3. Direct Wave Signal Parameter Estimation Method Based on Template Matching
Different from conventional PBR based on a civil illuminator that directly use the direct wave as the reference signal for cross correlation with scattered wave, we first estimate the parameters of the direct wave signal to achieve the time and frequency synchronization of PBR system. Therefore, the parameter estimation of the direct wave signal is a very important step in the whole signal processing flow and should be accurately completed in real time. Therefore, combined with the parameter template library of PAR signal, we propose a direct wave parameter estimation method based on template matching.
3.1. Signal Model
The PAR transmits the LFM signal, which can be expressed as
where A is the amplitude of transmitted signal,
is the slow time,
m indicates the pulse number,
is the fast time,
is the window function,
is the pulse width,
is the carrier frequency, and
is the chirp rate with bandwidth
. Then, the direct wave signal received by the reference antenna can be represented as
where
is the attenuation coefficient and
L is the distance between the PAR transmitter and reference antenna. The parameters to be estimated are
,
,
, and the time of arrival.
Based on the a priori knowledge of the waveform of PAR, we can build a template library of radar parameters, including CF template library noted as , PW template library noted as , and BW template library noted as , where , , and are the specific templates in the signal parameter template library and , , and are the number of parameters of CF, PW, and BW respectively. Based on these prior information, we can use a method based on template matching to estimate the parameters of direct wave signals in real time.
3.2. Proposed Method
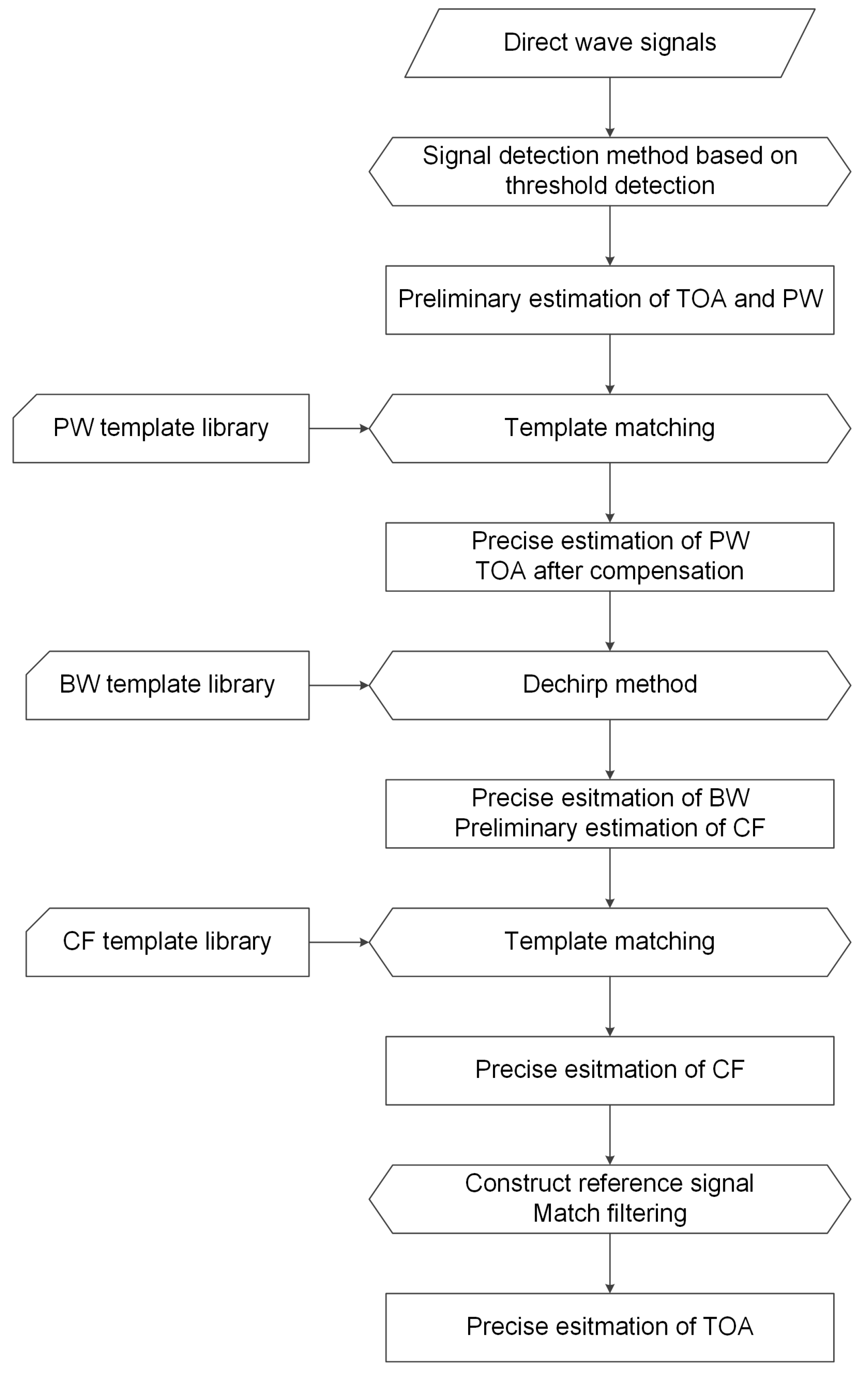
Figure 6 shows the flow chart of the direct wave parameter estimation method. Firstly, the double threshold detection method is used to detect the LFM signal and to roughly estimate the PW and TOA; then, by matching with the PW template, the precise estimation of the PW can be obtained. Secondly, the BW is accurately estimated by the dechirp method, and the CF is roughly estimated, then the precise estimation of CF is obtained by matching with the CF template. Finally, the accurate PW, BW, and CF are used to reconstruct a reference signal so as to accurately estimate the TOA by means of matched filtering. Next, we will introduce the process of direct wave parameter estimation step by step.
Step 1. In order to detect the LFM signal, it is necessary to determine the detection threshold. Since the signal-to-noise ratio (SNR) of a direct wave signal is generally high, after calculating the noise energy , set a threshold that is slightly larger than . Using the double threshold detection method, it is considered that the pulse has arrived only when the signal amplitude continuously exceeds the threshold for p times. Similarly, the pulse is considered to be ended only when the amplitude is continuously below the threshold for q times, wherein the values of p and q are determined by the SNR of the direct wave signal. After that, the preliminary estimated arrival time , end time , and preliminary estimated PW are obtained.
Step 2. Comparing
with the PW template library
, choose
which is closest to
in the PW template library; then,
is the precise estimation of PW. Thus, the PW estimation error is
, and the arrival time and end time are compensated, which can be expressed as
Step 3. Combined with the BW template library, the dechirp method is used to accurately estimate the BW and to preliminarily estimate the CF of the direct wave signal. Firstly, intercept the signal
of interval
;
contains a total of
points, where
is the sampling rate of the signal. As the BW template library is
, the possible chirp rate of the signal can be
Then, construct reference signals with different chirp rates, which can be expressed as
Multiply with different reference signals to obtain the dechirped signal , and then, perform a fixed-point FFT on the signal to obtain the spectrum . Measuring and comparing the peak value of , the chirp rate corresponding to the spectrum with the largest peak value is the chirp rate of the signal, and then, the accurate BW can be calculated as . At the same time, the frequency position corresponding to the peak value in the spectrum is the preliminary estimation of CF of the signal, noted as . Comparing with the CF template library , choose which is closest to in the CF template library; then, is the precise estimation of CF.
Step 4. Combining with the estimated parameters of the signal, including
and
, reconstruct a reference signal noted as
Using the reference signal to perform matched filtering on the whole signal; then, the peak position of the result is the accurate TOA of the direct wave pulse.
5. Experimental Results
In this section, some of the field experimental results are given.
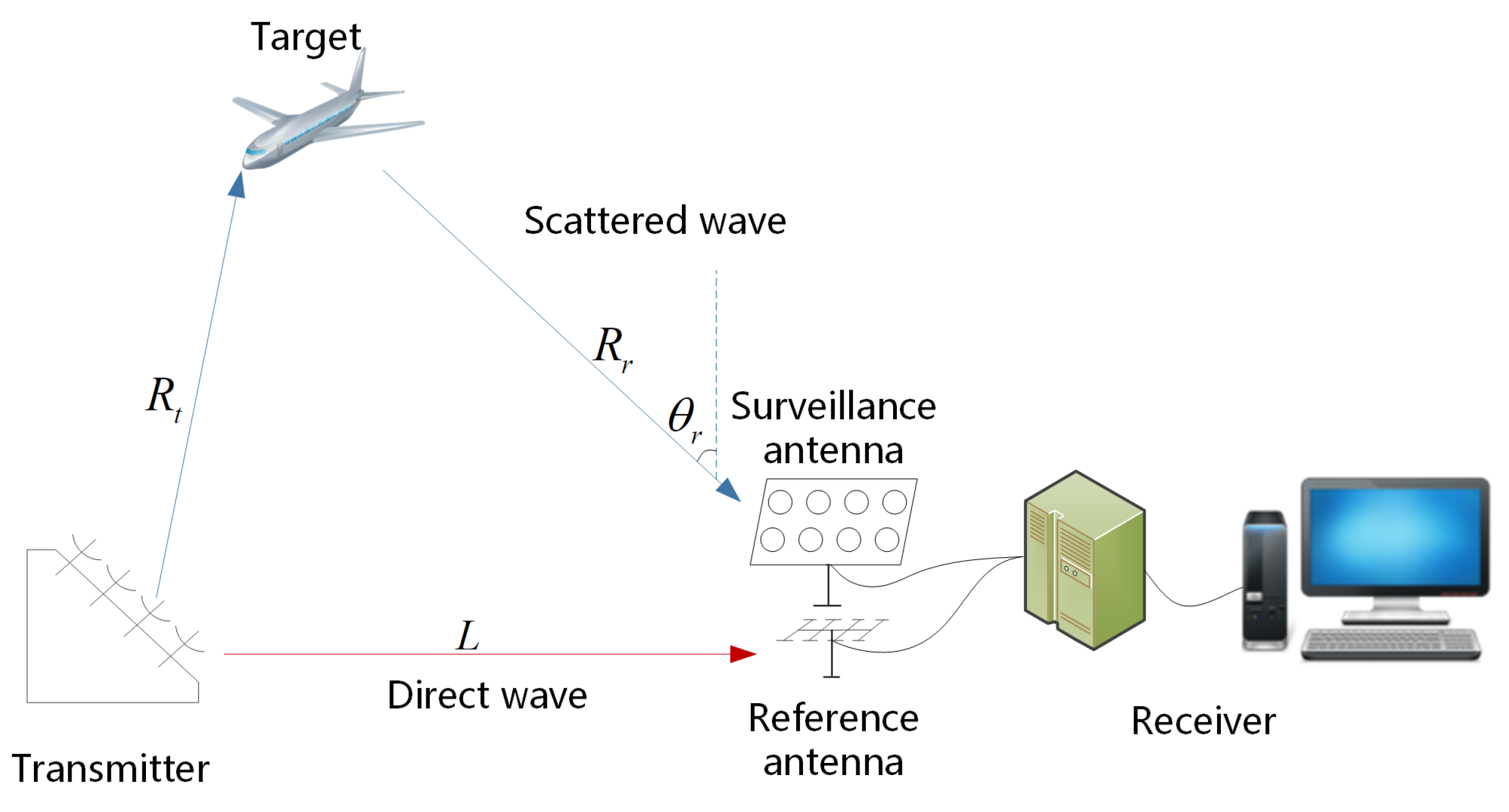
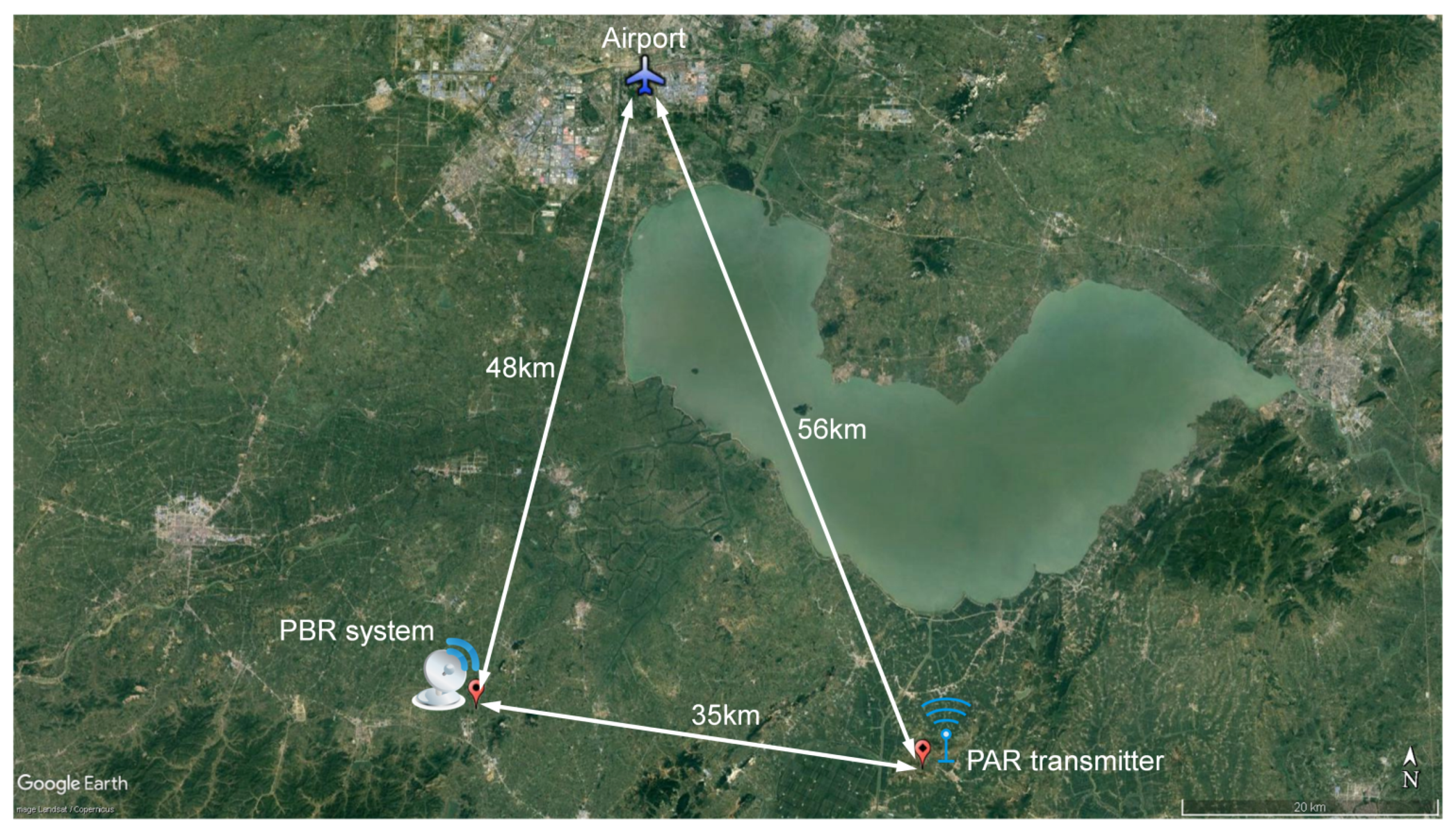
Figure 11 shows the experimental scenario geometry. The PAR transmitter and the PBR system are located at different locations, the distance between them is 35 km. There is a civil airport in the north of the PBR system with a distance of 48 km, thus ensuring the presence of aircraft targets in the air, which can be used to verify the target surveillance capability of the PBR system.
Based on a priori knowledge of the waveform of PAR signals, it can be concluded that there are 81 carrier frequency points of the transmitted signals, which vary from 558 MHz to 643 MHz. Therefore, a supersonic heterodyne receiver down-converts a high radio frequency (RF) signal from the reference antenna into intermediate frequencies (IF) signal by mixing the RF signal with a 600-MHz signal from a Local Oscillators (LO).
Figure 12 shows the imaginary part of the time domain signal and the spectrogram of direct wave IF signal.
It can be seen from
Figure 12 that there are two groups of signals with different CF and BW and that the PRI and PW of different pulses in the same group are different. For direct wave signal, the CF, BW, and PW of the signal are obtained by the parameter estimation method described in
Section 3 and the scattered wave signal received by the surveillance antenna is down-converted to baseband combined with the estimated CF.
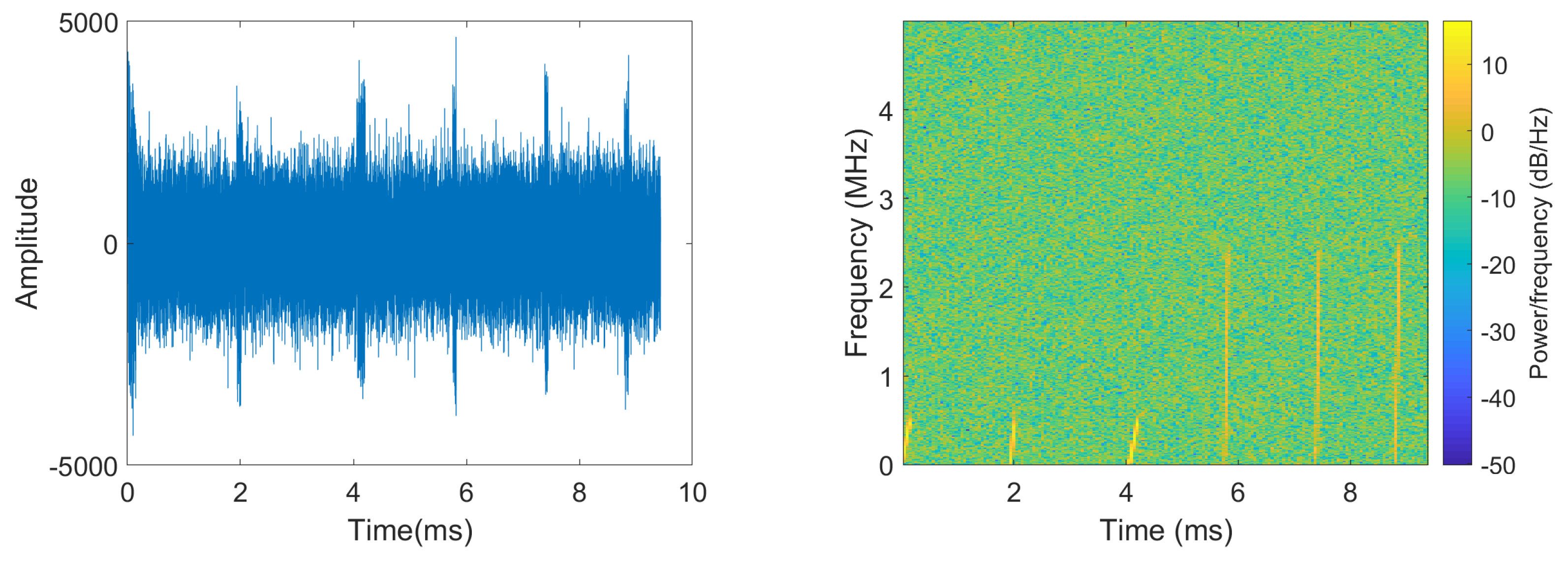
Figure 13 shows the imaginary part of the time domain signal and the spectrogram of the scattered wave baseband signal.
It can be seen that, although the surveillance antenna is not directed to the PAR transmitter, there are still direct wave signals in the surveillance channel, since the surveillance antenna can receive the sidelobe energy from the PAR emitter. However, it is obvious that the SNR of the direct wave in
Figure 13 is much lower than that in
Figure 12.
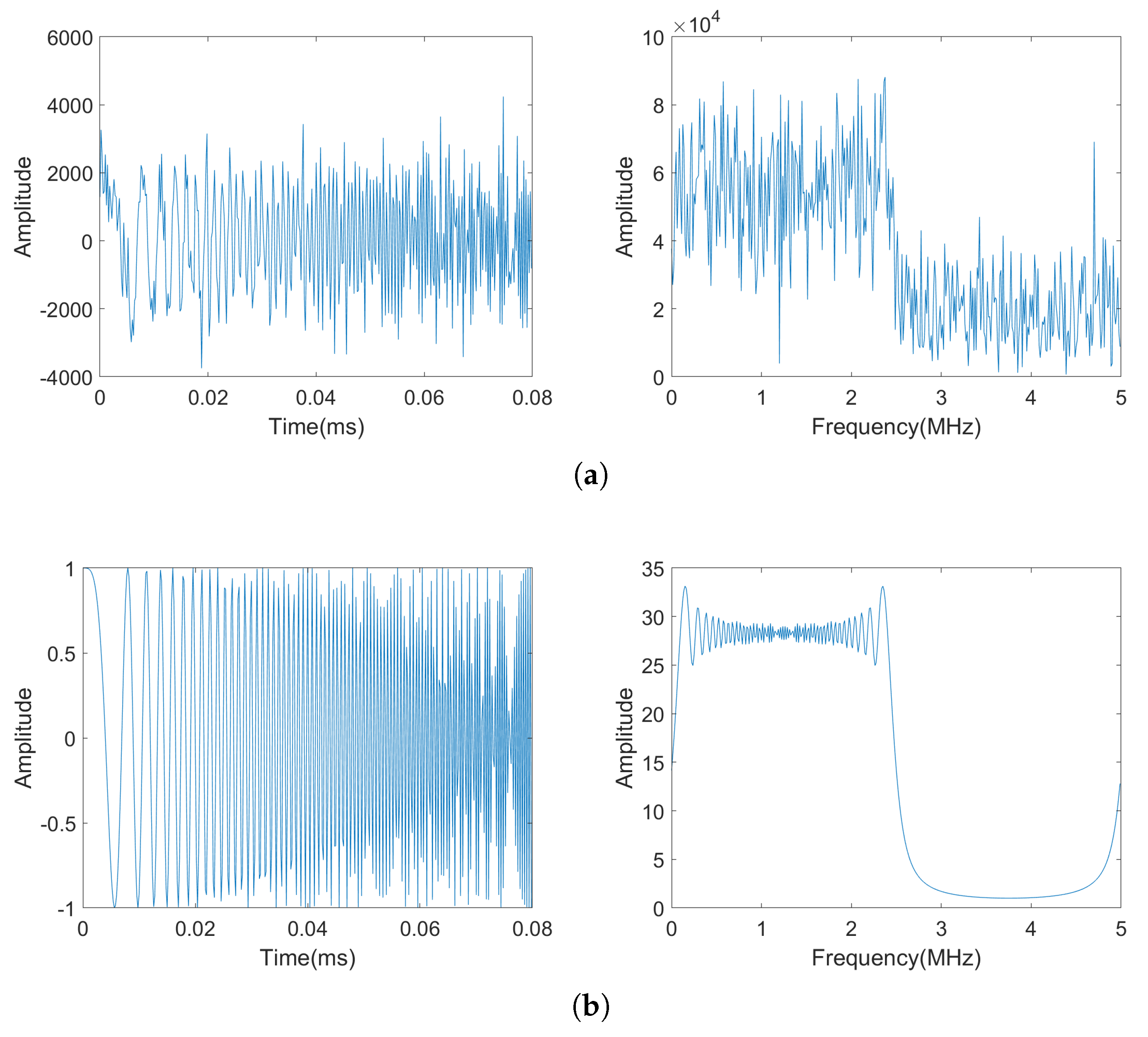
To verify the performance of matched filtering based on reconstructed reference signal, for the baseband signal in
Figure 13, the last direct wave pulse signal is intercepted and the time-domain and frequency-domain signals are shown in
Figure 14a, while the time-domain and frequency-domain plots of the reconstructed reference signal based on the parameters of the direct wave signal estimated in the reference channel are shown in
Figure 14b, it can be seen that the SNR of the reconstructed reference signal is much higher.
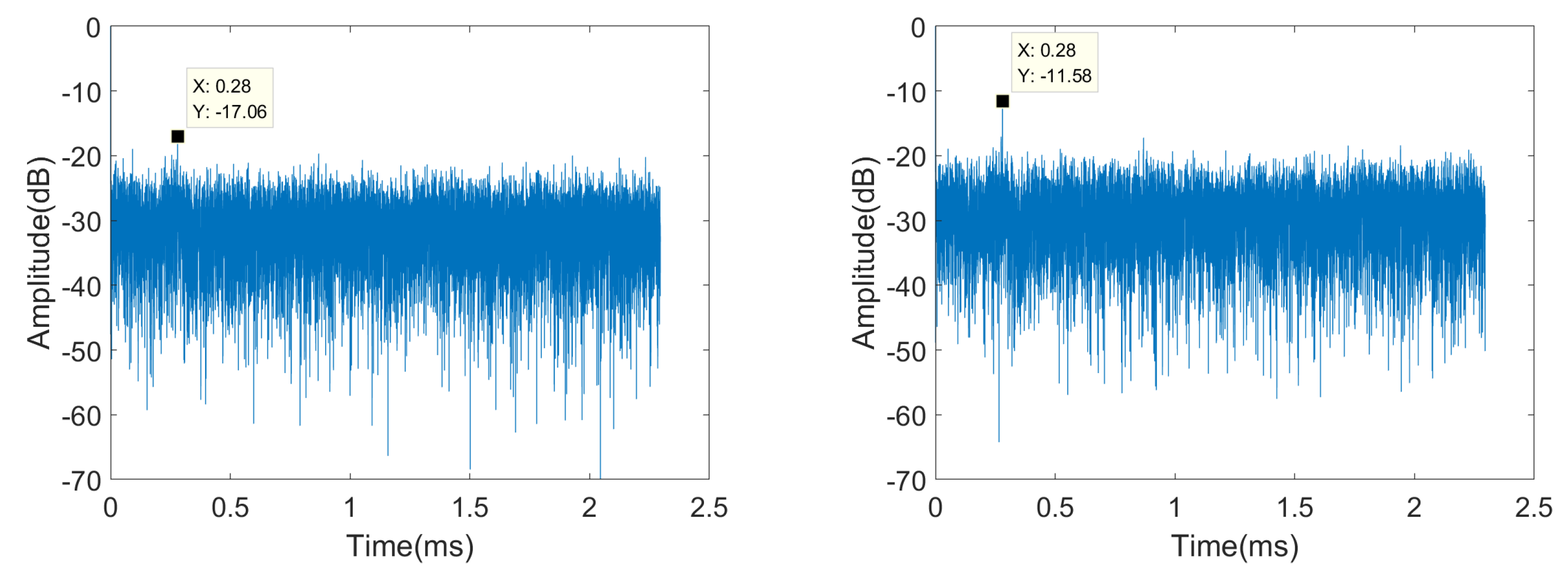
Then, the intercepted direct wave signal and the reconstructed reference signal are used for matched filtering of the whole echo signal, and the results are shown in
Figure 15; it can be seen that the target echo has a higher SNR after matched filtering using the reconstructed reference signal.
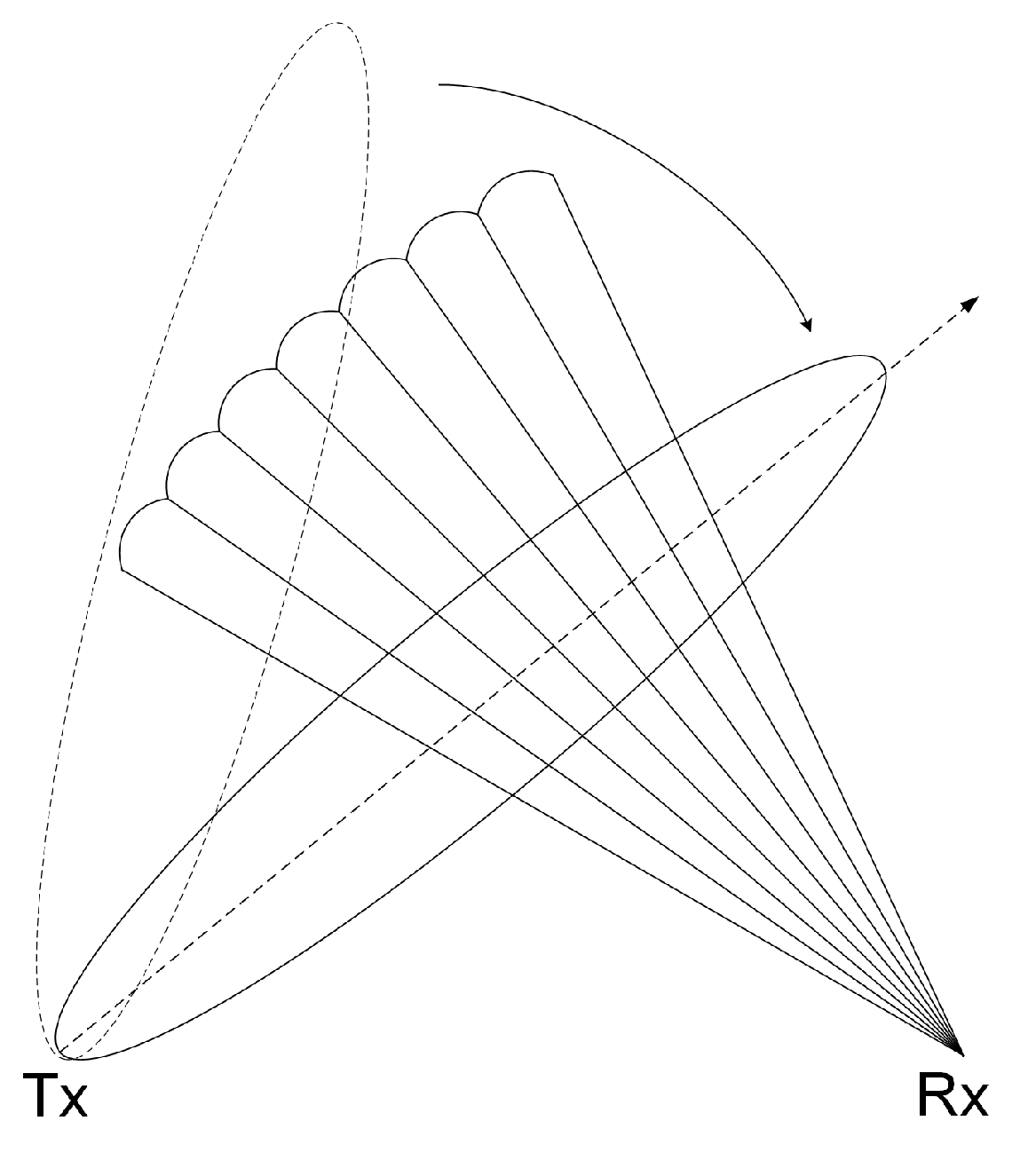
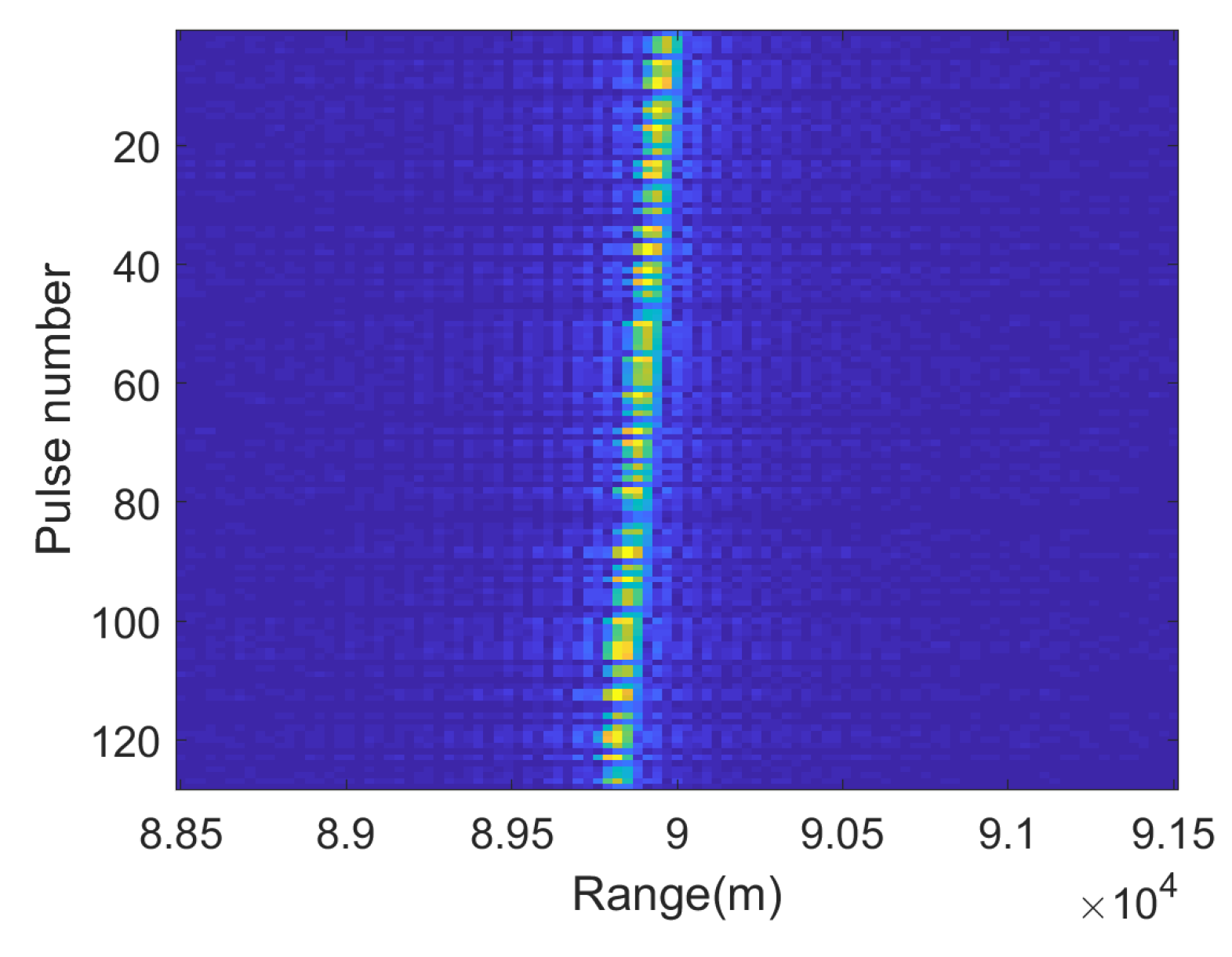
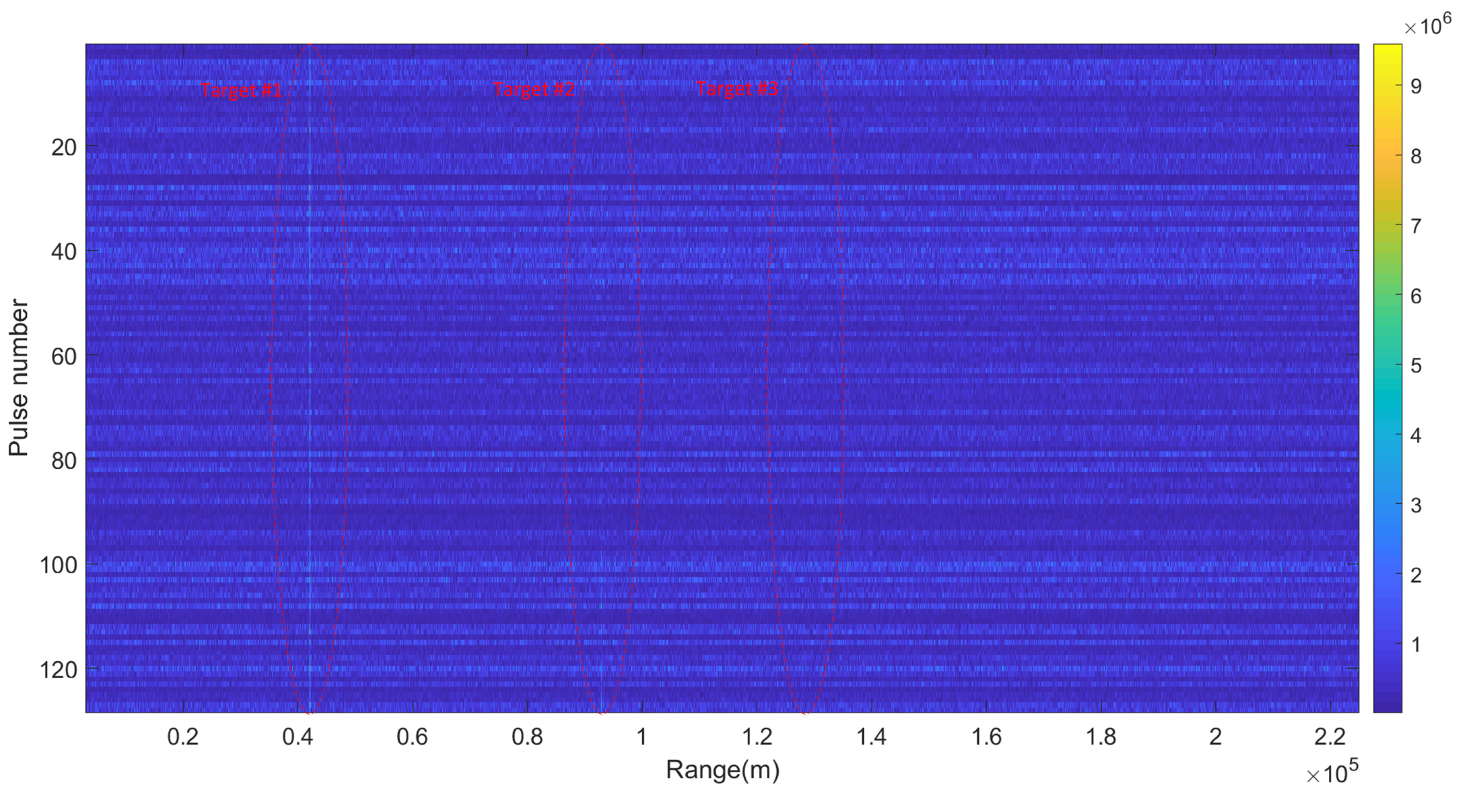
Since the CF and BW of the PAR signal are agile for different groups and a group of signal can last for a few seconds, we set 0.2 s as the CPI for the coherent integration of scattered wave signals. A total of 128 pulses in a CPI of the 4th beam are matched filtered and realigned according to the peak position of the direct wave signal, and the result is shown in
Figure 16.
In
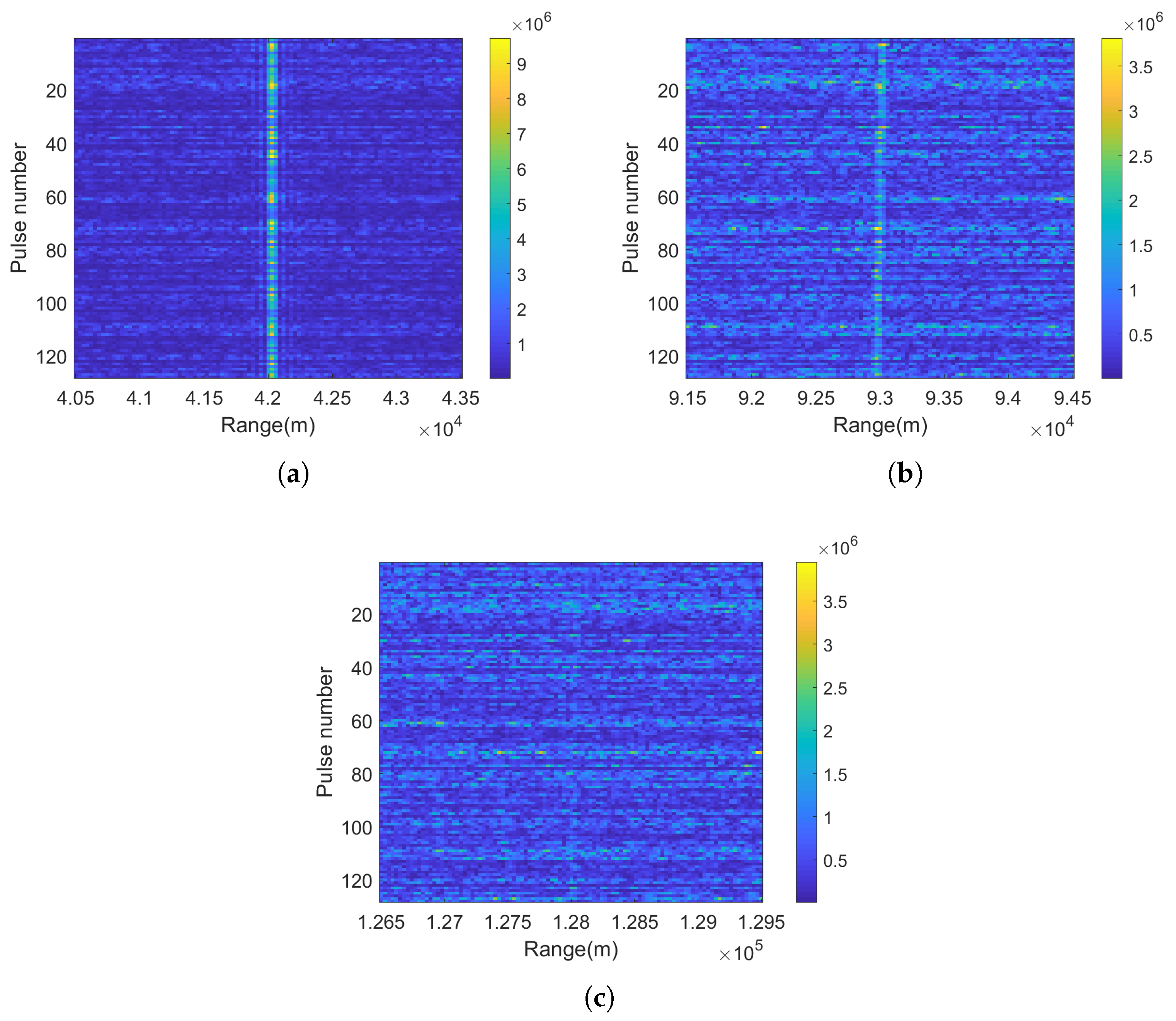
Figure 16, three trajectories of target can be faintly seen; then, they are intercepted and enlarged, which are shown in
Figure 17.
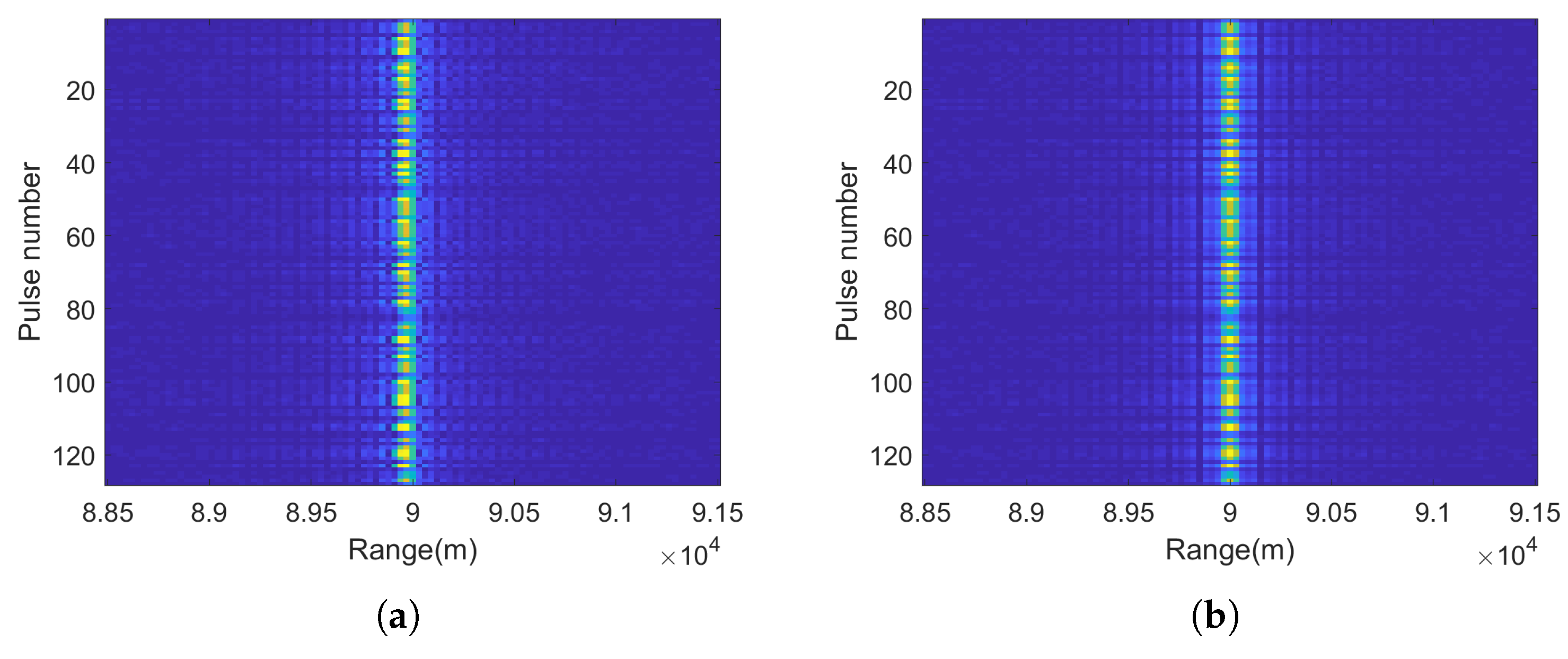
It can be seen that the energy of the target echo is inversely proportional to its range, and since the PW of the signal is staggered, the energy of different echo signals after pulse compression are different. In addition, it is obvious that target #1 in
Figure 17a is not moving, target #2 is a moving target since RCM occurs in
Figure 17b, while the SNR of the target #3 is too low to judge whether it is moving. Therefore, the energy of the target echo should be accumulated by using the coherent integration method proposed in
Section 4 so as to improve the detection probability of the target. Also, the velocity of targets can be estimated, thereby filtering out the fixed clutter.
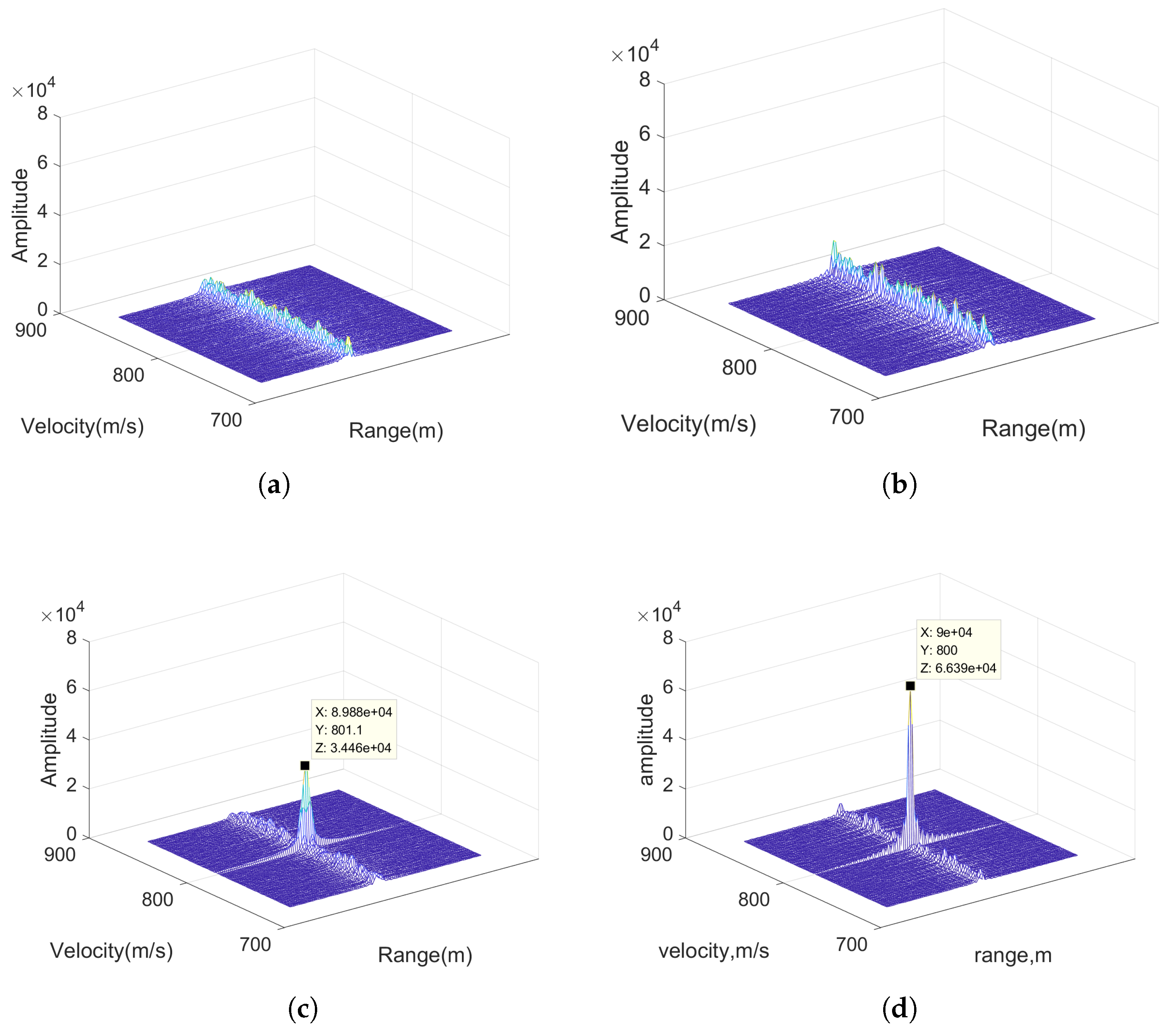
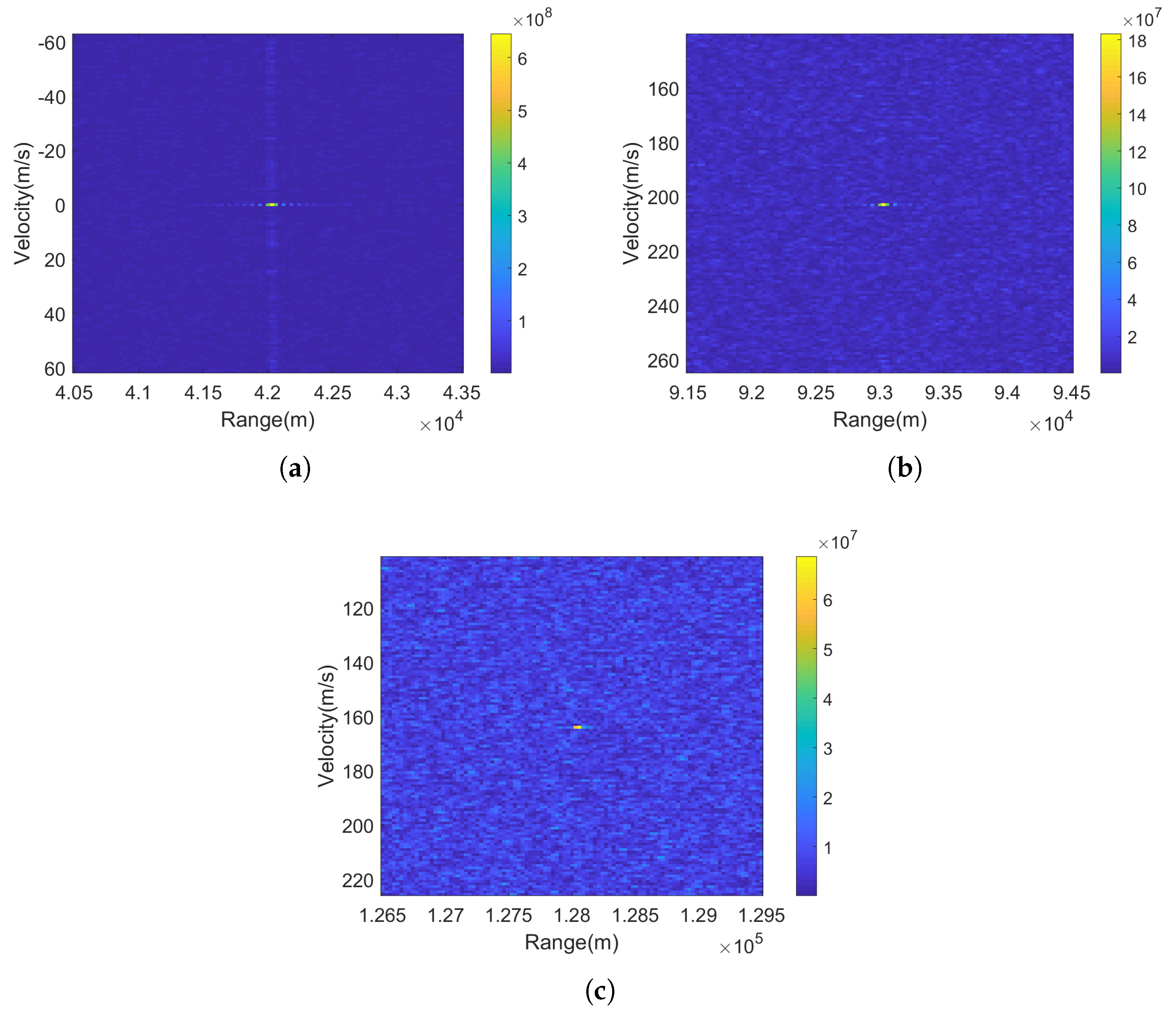
Figure 18 shows the results of coherent integration of the target echo in
Figure 17 using the Radon-NUFFT method. According to
Figure 18, the distance and velocity information of the three targets can be obtained as shown in
Table 2.
Therefore, the motion parameters of the aircraft target can be effectively obtained by using the coherent integration method proposed in
Section 4. After coherent integration and filtering of fixed clutter, CFAR detection is carried out for signals of different beams with a false alarm rate of
. After obtaining the target detection result, the target azimuth is obtained by amplitude comparison direction measurement. Finally, the distance between the target and the PBR system can be calculated according to Equation (
2) combined with the bistatic range and the azimuth of the target, so the target positioning can be achieved afterwards.
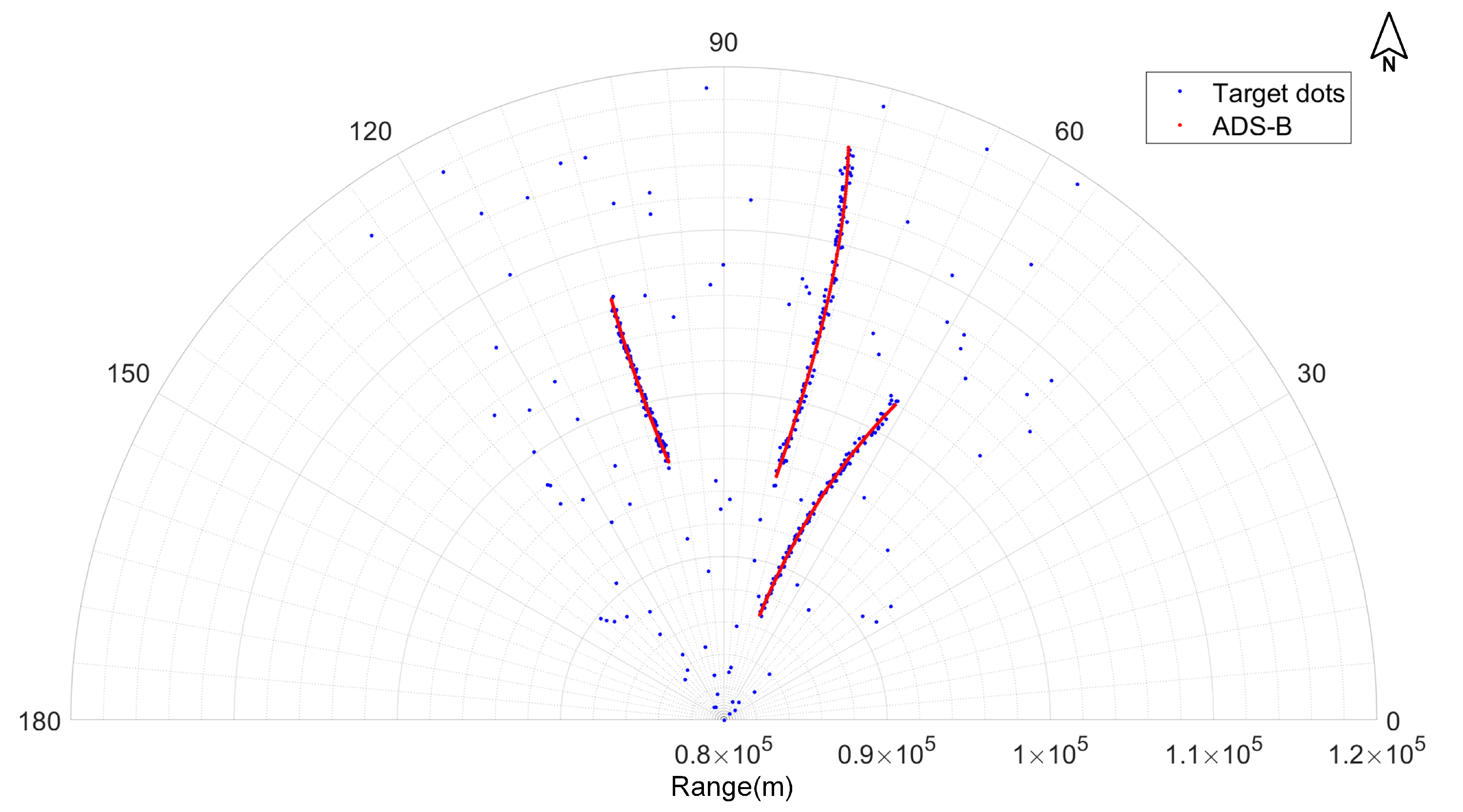
The target positioning results processed by PBR system for 120 s and target tracks converted from the real-time location information of flights provided by Automatic Dependent Surveillance-Broadcast (ADS-B) at the same time are drawn on the same figure to verify the target detection performance of the PBR system, which is shown in
Figure 19.
It can be seen that the PBR system achieves the detection and localization of three moving aircraft targets effectively. There are some deviations between the target dots and the tracks provided by ADS-B since the error of target’s monostatic range depends on the target’s bistatic range and azimuth measurement errors at the same time. Moreover, it can be seen that there are some erroneous points far from the actual target tracks, which are false alarm points caused by clutter and noise; since these erroneous points are not continuous in time, they can be filtered out by the target tracking method, which will be explored in our future work. To validate the accuracy of the PBR system, we compare the monostatic distance and azimuth of the target dots near the three target tracks in 120 s with an actual target position, and the root mean square error (RMSE) of the distance and azimuth of the target dots can be calculated to be 984 m and , respectively. It can be concluded that the PBR system based on PAR signals is able to locate the aircraft targets in the surveillance airspace.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}